Изобретение относится к области охраны окружающей среды, конкретнее к измерению радиоактивности объектов, более конкретно, к способам выявления радиоактивных источников на обследуемой территории и в движущихся объектах. Наибольшее применение способ найдет при радиационном мониторинге различных территорий и объектов с помощью систем детектирования радиации, установленных на транспортных средствах, например, на автомобилях, а также с помощью систем, установленных на контрольно - пропускных пунктах, пунктах приема и переработки вторичного сырья, металлолома, промышленных и бытовых отходов.
Известен способ радиационного контроля движущихся объектов, включающий регистрацию ионизирующего излучения, по крайней мере, одним детектором, установленным в зоне контроля, через которую перемещаются упомянутые объекты, непрерывное измерение текущих значений потока излучения, регистрируемого детектором, сравнение упомянутых значений с порогом постоянной величины, при превышении которой потоком регистрируемого излучения судят о наличии радиоактивности в контролируемом объекте [1].
Недостатком известного способа является низкая чувствительность обнаружения в связи с тем, что порог необходимо устанавливать заметно превышающим (в 1,5-2 раза) уровень естественного фона в зоне контроля из-за его возможных колебаний, вызванных, например, осадками, пылью, нестабильностью аппаратуры и др.
Наиболее близким техническим решением к предлагаемому изобретению является способ динамического радиационного контроля, включающий непрерывную регистрацию ионизирующего излучения, по крайней мере, одним детектором при относительном перемещении детектора и объекта контроля, фиксацию моментов превышения заданного порога сигналом детектора, пропорциональным потоку регистрируемого излучения, по которым судят об обнаружении источника радиоактивности в объекте, измерение скорости V относительного перемещения детектора и объекта [2].
Недостатком прототипа является отсутствие возможности определения одновременно местоположения и мощности обнаруженного источника радиации, что не позволяет оперативно оценить опасность источника и принять меры по его локализации и обезвреживанию.
Это связано с тем, что при реализации способа для обследования территории и различных объектов с помощью подвижного транспорта с установленными в нем детекторами, появление сигнала обнаружения источника свидетельствует только о том, что в зоне нахождения детекторов находится источник. Его местонахождение, характеризуемое тем, на каком расстоянии от траектории движения транспорта расположен источник, а также мощность источника (мощность дозы, создаваемая излучением источника на стандартном, например, 1 м расстоянии) остаются неизвестными. Это может быть и слабый источник, находящийся вблизи траектории движения транспорта с детекторами, и мощный источник, представляющий значительную опасность, расположенный на значительном удалении от траектории движения детекторов. В варианте реализации способа, по которому контролируемый объект (вагон, автомобиль) перемещается относительно неподвижных детекторов, в прототипе также невозможно определять оноовременно местоположение и мощность источника, находящегося в контролируемом объекте. Источник может находиться как вблизи наружной поверхности транспорта, так и в глубине транспорта. Отсутствие информации о местоположении источника в транспорте существенно усложняет его поиск, извлечение и обезвреживание.
Технический результат предлагаемого изобретения заключается в повышении надежности контроля за счет обеспечения возможности определения в процессе контроля местоположения и мощности обнаруженного источника радиации..
Указанный технический результат достигается предлагаемым способом динамического радиационного контроля, включающем непрерывную регистрацию ионизирующего излучения, по крайней мере, одним детектором при относительном перемещении детектора и объекта контроля, фиксацию моментов превышения заданного порога сигналом детектора, пропорциональным потоку регистрируемого излучения, по которым судят об обнаружении источника радиоактивности в объекте, измерение скорости V относительного перемещения детектора и объекта, а при обнаружении радиоактивности запоминают текущие значения Xi сигнала детектора, определяют разности ΔХ1 и ΔХ2 между максимальным и минимальными значениями сигнала, расположенными по времени до и после его максимального значения, фиксируют интервал времени t между текущими значениями сигнала, равными ΔX1/2 и ΔХ2/2, определяют расстояние  от детектора до обнаруженного источника радиоактивности из соотношения
от детектора до обнаруженного источника радиоактивности из соотношения  а мощность Ро дозы излучения источника на стандартном расстоянии
а мощность Ро дозы излучения источника на стандартном расстоянии  находят из соотношения
находят из соотношения  где ΔХ=(ΔХ1+ΔХ2)/2, К-коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
где ΔХ=(ΔХ1+ΔХ2)/2, К-коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
Отличительным признаками является то, что при обнаружении радиоактивности запоминают текущие значения Xi сигнала детектора, определяют разности ΔХ1 и ΔХ2 между максимальным и минимальными значениями сигнала, расположенными по времени до и после его максимального значения, фиксируют интервал времени t между текущими значениями сигнала, равными ΔХ1/2 и ΔХ2/2, определяют расстояние от детектора до обнаруженного источника радиоактивности из соотношения  а мощность Ро дозы излучения источника на стандартном расстоянии
а мощность Ро дозы излучения источника на стандартном расстоянии  находят из соотношения
находят из соотношения  где ΔХ=(ΔХ1+ΔХ2)/2, К-коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
где ΔХ=(ΔХ1+ΔХ2)/2, К-коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
Новые существенные признаки обеспечивают повышение надежности контроля за счет обеспечения возможности определения местоположения и оценки мощности обнаруженного источника.
Сущность изобретения поясняется чертежами, где представлены на:
фиг. 1 - схема реализации способа при перемещении транспортного средства с детектором относительно неподвижного объекта;
фиг. 2 - схема реализации способа при контроле движущихся объектов (транспортных средств), перемещающихся относительно неподвижного детектора;
фиг. 3 - сигнал детектора при перемещении источника относительно поверхности детектора в условиях неизменяющегося фона; Хп - порог обнаружения, Xmin - минимальное значение сигнала, Хmах - максимальное значение сигнала, ΔХ=Хmах - Xmin, t - интервал времени, соответствующий длительности сигнала на половине его высоты (ΔХ/2);
фиг. 4 - сигнал детектора при перемещении источника относительно поверхности детектора в условиях переменного фона; Xmin1 - минимальное значение сигнала, расположенного по времени до значения Xmax; Xmin2 - минимальное значение сигнала, расположенного по времени после Хmах;
ΔХ1=Хmах - Xmin1; ΔХ2=Хmах - Xmin2; ΔХ=(ΔХ1+ΔX2)/2, t - интервал времени, соответствующий длительности сигнала между значениями Xmin1 и Xmin2.
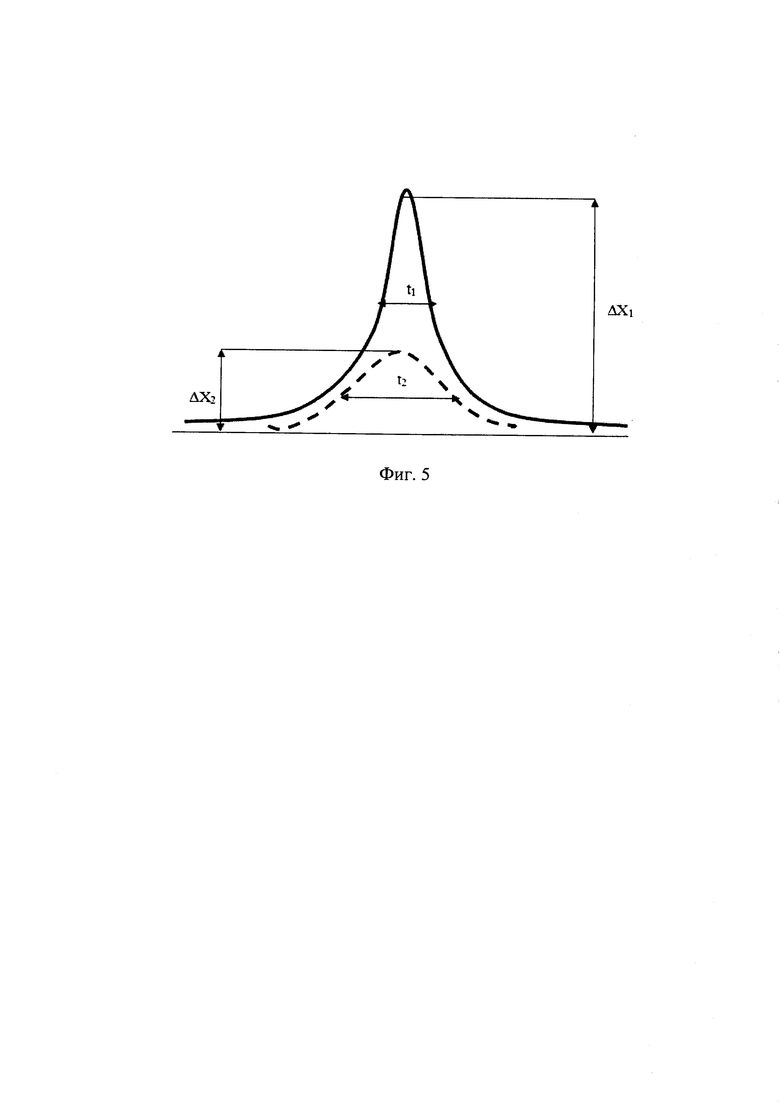
фиг. 5 - сигналы, соответствующие источникам одинаковой мощности, находящимся на разном удалении от поверхности детектора; ΔХ1 - максимальное значение сигнала за вычетом фона от источника, расположенного на меньшем расстоянии от детектора; ΔХ2 - максимальное значение сигнала от этого источника за вычетом фона, расположенного на большем расстоянии от детектора; t1 - длительность сигнала на половине его высоты от источника, расположенного ближе к детектору; - t2 - длительность сигнала на половине его высоты от источника, расположенного дальше к детектору.
При контроле неподвижных (фиг. 1) объектов (территорий, сооружений) способ реализуется с помощью детектора 1, установленного в транспортном средстве 2, движущемся в направлении, показанном стрелкой, относительно объекта контроля, например, проезжей части территории населенного пункта, где может находиться радиационный источник 3 (локальное радиоактивное загрязнении и т.п.). При контроле движущихся объектов, например, железнодорожных вагонов 4 (фиг. 2), детектор расположен неподвижно на определенном расстоянии от поверхности вагонов. В обоих случаях детектор подвижен относительно объектов контроля.
В качестве детектора 1 используется высокочувствительный сцинтилляционный детектор объемом 5-20 л. При контроле территорий детектор устанавливают на транспортном средстве, например, а/м «Газель». При контроле подвижных объектов, например, железнодорожных вагонов, детектор устанавливают вблизи путей, по которым следуют объекты. Сигналы детектора, пропорциональные частоте следования импульсов, через интерфейсный блок, например, аналого-цифровой преобразователь, поступают в компьютер, непрерывно обрабатывающий поступающую информацию в соответствии с предлагаемым способом. Местоположение транспорта с детекторами фиксируется навигационной системой «GPS». Зона контроля осматривается телекамерой, связанной с компьютером. При обнаружении источника запоминается изображение объекта, в том числе встречного транспорта.
Способ реализуется следующим образом. При обследовании территорий транспортное средство 2 с детектором 1 (фиг. 1) движется по заданному маршруту с определенной скоростью (20-25 км/ч). Сигнал детектора, амплитуда которого пропорциональна уровню естественного фона обследуемой территории, непрерывно регистрируются компьютером и отображаются на мониторе.. При отсутствии источников в зоне контроля фиксируется сигнал, пропорциональный уровню радиационного фона. Если уровень радиационного фона в процессе движения транспортного средства 2 практически не изменяется, то в случае появления источника в зоне контроля сигнал детектора возрастает от величины Xmin до Хmах (фиг. 3) и далее снижается вновь до величины Xmin. Если сигнал превышает некоторый порог Хп, это свидетельствует об обнаружении источника и система регистрации вырабатывает соответствующий сигнал; одновременно фиксируются координаты транспорта с детектором и изображение контролируемого объекта.
При обнаружении радиоактивности запоминают текущие значения Xi сигнала детектора, определяют разность ΔХ между максимальным и минимальным значениями сигнала, расположенными по времени до и после его максимального значения, фиксируют интервал времени t между текущими значениями сигнала, равными ΔХ/2, определяют расстояние  от детектора до обнаруженного источника радиоактивности из соотношения
от детектора до обнаруженного источника радиоактивности из соотношения  а мощность Ро дозы излучения источника на стандартном расстоянии находят из соотношения
а мощность Ро дозы излучения источника на стандартном расстоянии находят из соотношения  К-коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
К-коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
В случае, если уровень фона в процессе контроля изменяется (фиг. 4), то определяют разности ΔХ1 и ΔХ2 между максимальным и минимальными значениями сигнала, расположенными по времени до и после его максимального значения, фиксируют интервал времени t между текущими значениями сигнала, равными ΔХ1/2 и ΔХ2/2, определяют расстояние от детектора до обнаруженного источника радиоактивности из соотношения  а мощность Ро дозы излучения источника на стандартном расстоянии находят из соотношения
а мощность Ро дозы излучения источника на стандартном расстоянии находят из соотношения  где ΔХ=(ΔХ1+ΔХ2)/2, К - коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
где ΔХ=(ΔХ1+ΔХ2)/2, К - коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
В случае, если источник 3 находится на большом расстоянии от детектора 1, то амплитуда сигнала ΔХ2 меньше амплитуды ΔХ1, соответствующей обнаружению источника, расположенного ближе к детектору (фиг. 5). Соответственно интервал времени t2 ля источника, находящегося на большем удалении от детектора, превышает указанный интервал t1 для источника, расположенного ближе к детектору.
Таким образом при обнаружении источника определяется его местонахождение в зоне контроля (расстояние до детектора), а также его мощность по амплитуде сигнала и величине указанного расстояния. Это позволяет оценить опасность источника и своевременно принять меры по его локализации и обезвреживанию.
Пример 1.
Способ реализуется для обследования территории вблизи автомобильной дороги. В качестве детекторов используются пластиковые сцинтилляторы объемом 10 л. При уровне естественного фона 0,1 мкЗв/ч средняя скорость счета импульсов детекторов составляет 2000 имп/с. Это соответствует амплитуде аналогового сигнала 0,2 В. Коэффициент К составляет 2 мВ/нЗв/ч. Скорость движения транспорта с детекторами составляет 30 км/ч. Порог обнаружения Хп установлен на уровне 220 мВ, что соответствует приращению мощности дозы излучения 10 нЗв/ч над фоном. В процессе движения транспорта с детекторами зафиксировано превышение порога, что соответствует обнаружению источника радиации в зоне контроля, простирающейся вдоль траектории движения транспорта. Сигнал детектора ΔХ за вычетом фона составил 50 мВ. Интервал времени t между значениями сигнала ΔХ/2 (фиг. 3) до и после максимума составил 1 секунду. Из соотношения  определяем, что расстояние от источника до детектора составляет 4,2 м. Мощность источника, определяемая из выражения
определяем, что расстояние от источника до детектора составляет 4,2 м. Мощность источника, определяемая из выражения  составила 1760 нЗв/ч на расстоянии 1 м, т.е. 1,76 мкЗв/ч. Таким образом предлагаемый способ обеспечил не только обнаружение источника в зоне контроля, но и определение его местоположения, а также его мощности.
составила 1760 нЗв/ч на расстоянии 1 м, т.е. 1,76 мкЗв/ч. Таким образом предлагаемый способ обеспечил не только обнаружение источника в зоне контроля, но и определение его местоположения, а также его мощности.
Способ прототип позволяет обнаружить указанный выше источник, однако определить его местоположение и мощность в прототипе не возможно. Это может быть слабый источник, расположенный вблизи траектории движения транспорта, или мощный источник, расположенный на значительном удалении от траектории движения транспорта с детектором.
Пример 2
При тех же условиях, что и в примере 1, только сигнал детектора за вычетом фона составил 500 мВ, а интервал времени t=10 с. Расстояние от детектора до источника составило 42 м, а мощность дозы источника - 1,76 мЗв/ч на расстоянии 1 м. Этот источник представляет значительную опасность, и требуются незамедлительные меры по его локализации и обезвреживанию.
В способе - прототипе не удается определить местоположение источника и степень его опасности.
Пример 3
При тех же условиях, что и в примере 1, контроль производится в условиях изменяющегося фона (фиг. 4). Величина Xmin1 составила 60 мВ; Хmах=80 мВ; Xmin2=20 мВ; ΔХ1=20 мВ; ΔХ2=60 мВ; ΔХ=(ΔХ1+ΔХ2)/2=40 мВ; интервал времени t=2 с, что соответствует расстоянию от детектора до источника равно 8,4 м и его мощности дозы на расстоянии 1 м - 5,63 мкЗв/ч.
Способ - прототипа в условиях переменного фона не позволяет однозначно обнаружить источник, т.к. порог срабатывания в этом способе должен быть выше максимального значения фона, в том числе выше величины Хmах (фиг. 4). В случае, если порог окажется ниже Хmах (мощный источник на небольшом удалении от детектора), то в способе - прототипе не удается определить местоположение источника и степень его опасности.
Пример 4
Контролируется транспортное средство (вагон 4), перемещающееся со скоростью 15 км/ч относительно детектора 1 (фиг. 2). Расстояние от детектора до поверхности вагона составило 1 м. Сигнал детектора ΔХ за вычетом фона составил 50 мВ. Интервал времени t между значениями сигнала ΔХ/2 (фиг. 3) до и после максимума составил 1 секунду. Из соотношения  определяем, что расстояние от источника до детектора составляет 2,1 м. Мощность источника, определяемая из выражения
определяем, что расстояние от источника до детектора составляет 2,1 м. Мощность источника, определяемая из выражения  составила 440 нЗв/ч на расстоянии 1 м, т.е. 0,44 мкЗв/ч.. Расстояние от источника до поверхности транспорта, обращенной к детектору, определяется как разность между расстоянием от источника до детектора и расстоянием от детектора до поверхности транспорта. В данном случае расстояние от источника до поверхности транспорта составляет 1,1 м. Таким образом предлагаемый способ обеспечил не только обнаружение источника в вагоне, но и определение его местоположения (глубины залегания в вагоне), а также его мощности.
составила 440 нЗв/ч на расстоянии 1 м, т.е. 0,44 мкЗв/ч.. Расстояние от источника до поверхности транспорта, обращенной к детектору, определяется как разность между расстоянием от источника до детектора и расстоянием от детектора до поверхности транспорта. В данном случае расстояние от источника до поверхности транспорта составляет 1,1 м. Таким образом предлагаемый способ обеспечил не только обнаружение источника в вагоне, но и определение его местоположения (глубины залегания в вагоне), а также его мощности.
Способ - прототип не имеет возможности определить, на каком расстоянии от поверхности вагона находится источник, и какова его мощность.
Таким образом, предлагаемый способ обеспечивает повышение надежности контроля за счет обеспечения возможности определения в процессе контроля местоположения и мощности источника и надежной фиксации событий, связанных с нахождением источника в движущемся транспорте.
Литература
1. RU 2094821, Бюллетень №30 от 27.10.77.
2. Н.П. Валуев, Ю.В. Мойш, В.М. Качалов, Н.В. Никоненков. Автоматизированные системы радиационного контроля сырья и металлолома, Проблемы черной металлургии и материаловедения, 2009, №3, с. 107-110.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОГО РАДИАЦИОННОГО КОНТРОЛЯ | 2010 |
|
RU2444029C2 |
| СПОСОБ ДИНАМИЧЕСКОГО РАДИАЦИОННОГО КОНТРОЛЯ | 2009 |
|
RU2436120C2 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2317570C1 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ СЫРЬЯ И МАТЕРИАЛОВ В ТРАНСПОРТНЫХ СРЕДСТВАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2142145C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2011 |
|
RU2456638C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2094821C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ СЛАБЫХ ПОТОКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2006 |
|
RU2293999C1 |
| Радиационный монитор и способ определения мощности эквивалентной дозы гамма-излучения | 2016 |
|
RU2650726C1 |
| СПОСОБ ФИЗИЧЕСКОГО МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ СОСТОЯНИЙ РАДИАЦИОННОГО ФОНА В МЕСТАХ СТАЦИОНАРНОГО РАЗМЕЩЕНИЯ ДЕТЕКТОРОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2616355C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2003 |
|
RU2242024C1 |


Изобретение относится к области охраны окружающей среды. Сущность изобретения заключается в том, что способ динамического радиационного контроля дополнительно содержит этапы, на которых при обнаружении радиоактивности запоминают текущие значения Xi сигнала детектора, определяют разности ΔХ1 и ΔХ2 между максимальным и минимальными значениями сигнала, расположенными по времени до и после его максимального значения, фиксируют интервал времени t между текущими значениями сигнала, равными ΔX1/2 и ΔХ2/2, определяют расстояние  от детектора до обнаруженного источника радиоактивности из соотношения
от детектора до обнаруженного источника радиоактивности из соотношения  а мощность Ро дозы излучения источника на стандартном расстоянии
а мощность Ро дозы излучения источника на стандартном расстоянии  находят из соотношения
находят из соотношения  где ΔХ=(ΔХ1+ΔХ2)/2, К - коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения. Технический результат – повышение надежности радиационного контроля. 5 ил.
где ΔХ=(ΔХ1+ΔХ2)/2, К - коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения. Технический результат – повышение надежности радиационного контроля. 5 ил.
Способ динамического радиационного контроля, включающий непрерывную регистрацию ионизирующего излучения по крайней мере одним детектором при относительном перемещении детектора и объекта контроля, фиксацию моментов превышения заданного порога сигналом детектора, пропорциональным потоку регистрируемого излучения, по которым судят об обнаружении источника радиоактивности в объекте, измерение скорости V относительного перемещения детектора и объекта, отличающийся тем, что при обнаружении радиоактивности запоминают текущие значения Xi сигнала детектора, определяют разности ΔХ1 и ΔХ2 между максимальным и минимальными значениями сигнала, расположенными по времени до и после его максимального значения, фиксируют интервал времени t между текущими значениями сигнала, равными ΔX1/2 и ΔХ2/2, определяют расстояние  от детектора до обнаруженного источника радиоактивности из соотношения
от детектора до обнаруженного источника радиоактивности из соотношения  а мощность Ро дозы излучения источника на стандартном расстоянии
а мощность Ро дозы излучения источника на стандартном расстоянии  находят из соотношения
находят из соотношения  где ΔХ=(ΔХ1+ΔХ2)/2, К - коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
где ΔХ=(ΔХ1+ΔХ2)/2, К - коэффициент пропорциональности между амплитудой сигнала детектора и мощностью дозы регистрируемого излучения.
| Н.П | |||
| Валуев, О.В | |||
| Лысова, Н.В | |||
| Никоненков, И.А | |||
| Пушкин | |||
| Радиационный контроль движущихся транспортных средств с помощью высокочувствительных дозиметрических систем | |||
| Научные и образовательные проблемы гражданской защиты | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| СПОСОБ ДИНАМИЧЕСКОГО РАДИАЦИОННОГО КОНТРОЛЯ | 2010 |
|
RU2444029C2 |
| СПОСОБ ДИНАМИЧЕСКОГО РАДИАЦИОННОГО КОНТРОЛЯ | 2009 |
|
RU2436120C2 |
| US 2014240134 A1, 28.08.2014 | |||
| CN 101387705 A, | |||

