Изобретение относится к области охраны окружающей среды, конкретнее к измерению радиоактивности объекта, более конкретно к способам выявления радиоактивных источников на обследуемой территории и в движущихся объектах. Наибольшее применение способ найдет при радиационном мониторинге различных территорий и объектов с помощью систем детектирования радиации, установленных на транспортных средствах, например на автомобилях, а также с помощью систем, установленных на контрольно-пропускных пунктах, пунктах приема и переработки вторичного сырья, металлолома, промышленных и бытовых отходов.
Известен способ радиационного контроля движущихся объектов, включающий регистрацию ионизирующего излучения, по крайней мере, одним детектором, установленным в зоне контроля, через которую перемещаются упомянутые объекты, непрерывное измерение текущих значений потока излучения, регистрируемого детектором, сравнение упомянутых значений с порогом постоянной величины, при превышении которой потоком регистрируемого излучения судят о наличии радиоактивности в контролируемом объекте [1].
Недостатком известного способа является низкая чувствительность обнаружения в связи с тем, что порог необходимо устанавливать заметно превышающим (в 1,5-2 раза) уровень естественного фона в зоне контроля из-за его возможных колебаний, вызванных, например, осадками, пылью, нестабильностью аппаратуры и др.
Наиболее близким техническим решением к предлагаемому изобретению является способ динамического радиационного контроля, включающий непрерывную регистрацию ионизирующего излучения, по крайней мере, двумя детекторами в процессе перемещения объекта контроля и детекторов относительно друг друга, фиксацию моментов превышения сигналами детекторов заданного порога, по которым судят об обнаружении источника в зоне контроля [2].
Недостатком прототипа является отсутствие возможности определения местоположения и мощности обнаруженного источника радиации, что не позволяет оперативно оценить опасность источника и принять меры по его локализации и обезвреживанию.
Это связано с тем, что при реализации способа для обследования территории и различных объектов с помощью подвижного транспорта с установленными в нем детекторами появление сигнала обнаружения источника свидетельствует только о том, что в зоне нахождения детекторов находится источник. Его местонахождение, характеризуемое тем, что источник находится справа или слева от транспорта с детекторами, а также на каком расстоянии от траектории движения транспорта расположен источник, а также мощность источника (мощность дозы, создаваемая излучением источника на стандартном, например, 1 м расстоянии) остаются неизвестными. Это может быть и слабый источник, находящийся вблизи траектории движения транспорта с детекторами, и мощный источник, представляющий значительную опасность, расположенный на значительном удалении от траектории движения детекторов. Кроме того, источник радиации может находиться во встречном транспорте, а в известном способе он может классифицироваться как источник, расположенный на поверхности вблизи дороги, по которой следует транспорт с детекторами. В связи с этим после обнаружения поиск источника будет производиться в зоне, прилегающей к дороге, по которой следует транспорт с детекторами. Сам же источник радиации будет утерян.
В варианте реализации способа, по которому контролируемый объект (вагон, автомобиль) перемещается относительно неподвижных детекторов, в прототипе также невозможно определять местоположение и мощность источника, находящегося в контролируемом объекте, в особенности, когда объекты могут следовать по параллельным путям с обеих сторон детектора (см. фиг.2). Источник может находиться как вблизи наружной поверхности транспорта, так и в глубине транспорта. Отсутствие информации о местоположении источника в транспорте существенно усложняет его поиск, извлечение и обезвреживание.
Технический результат предлагаемого изобретения заключается в повышении надежности контроля за счет обеспечения возможности определения в процессе контроля местоположения и мощности обнаруженного источника радиации. Кроме того, имеется возможность надежно фиксировать события, связанные с наличием источника радиации во встречном транспорте, т.е. исключить утерю обнаруженных источников.
Указанный технический результат достигается предлагаемым способом динамического радиационного контроля, включающим непрерывную регистрацию ионизирующего излучения, по крайне мере, двумя детекторами в процессе перемещения объекта контроля и детекторов относительно друг друга, фиксацию моментов превышения сигналами детекторов заданного порога, по которым судят об обнаружении источника в зоне контроля, при этом в процессе контроля детекторы смещены друг относительно друга в направлении, перпендикулярном направлению относительного перемещения детекторов и объекта контроля, а при обнаружении источника определяют максимальные значения амплитуд сигналов детекторов, соответствующих появлению источника в зоне контроля, за вычетом средних значений сигналов, соответствующих окружающему фону, сравнивают упомянутые максимальные значения амплитуд сигналов каждого детектора, определяют детектор, которому соответствует сигнал большей амплитуды, вычисляют отношение n сигнала большей амплитуды к сигналу меньшей амплитуды, по указанному отношению судят о местоположении источника в зоне контроля, причем расстояние l от источника до детектора, которому соответствует сигнал большей амплитуды, определяют из соотношения
 ,
,
где а - расстояние между детекторами в направлении, перпендикулярном направлению относительного перемещения детекторов и объекта контроля. Кроме того, при контроле с помощью детекторов, установленных на транспортном средстве, перемещающемся по автомобильным дорогам, измеряют длительность сигналов детекторов, соответствующих обнаруженному источнику, сравнивают измеренную длительность с пороговой величиной и в случае, если длительность сигнала большей амплитуды меньше пороговой величины, а амплитуда сигнала детектора, смещенного к середине проезжей части, превышает амплитуду сигнала детектора, смещенного к объекту, судят об обнаружении источника во встречном транспорте.
Отличительным признаками является то, что в процессе контроля детекторы смещены друг относительно друга в направлении, перпендикулярном направлению относительного перемещения детекторов и объекта контроля, а при обнаружении источника определяют максимальные значения амплитуд сигналов детекторов, соответствующих появлению источника в зоне контроля, за вычетом средних значений сигналов, соответствующих окружающему фону, сравнивают упомянутые максимальные значения амплитуд сигналов каждого детектора, определяют детектор, которому соответствует сигнал большей амплитуды, вычисляют отношение n сигнала большей амплитуды к сигналу меньшей амплитуды, по указанному отношению судят о местоположении источника в зоне контроля, причем расстояние l от источника до детектора, которому соответствует сигнал большей амплитуды, определяют из соотношения
 ,
,
где а - расстояние между детекторами в направлении, перпендикулярном направлению относительного перемещения детекторов и объекта контроля.
Кроме того, с помощью детекторов, установленных на транспортном средстве, перемещающемся по автомобильным дорогам, измеряют длительность сигналов детекторов, соответствующих обнаруженному источнику, сравнивают измеренную длительность с пороговой величиной и в случае, если длительность сигнала большей амплитуды меньше пороговой величины, а амплитуда сигнала детектора, смещенного к середине проезжей части, превышает амплитуду сигнала детектора, смещенного к обочине, судят об обнаружении источника во встречном транспорте.
Новые существенные признаки обеспечивают повышение надежности контроля за счет обеспечения возможности определения местоположения и оценки мощности обнаруженного источника. Кроме того, обеспечивается надежная фиксация источников во встречном транспорте.
Сущность изобретения поясняется чертежами, где представлены на:
фиг.1 - схема реализации способа при перемещении транспортного средства с детекторами относительно неподвижного объекта;
фиг.2 - схема реализации способа при контроле движущихся объектов (транспортных средств), перемещающихся относительно неподвижных детекторов;
фиг.3 - сигналы детекторов при перемещении транспорта с детекторами мимо источника, находящегося на расстоянии 1 м от поверхности детектора 2;
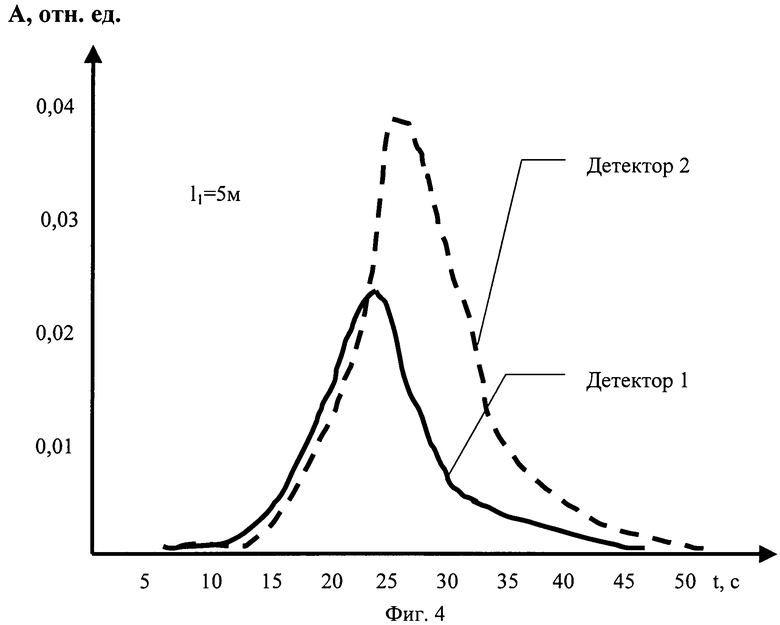
фиг.4 - сигналы, соответствующие обнаружению источника, находящегося на расстоянии 5 м от поверхности детектора 2;
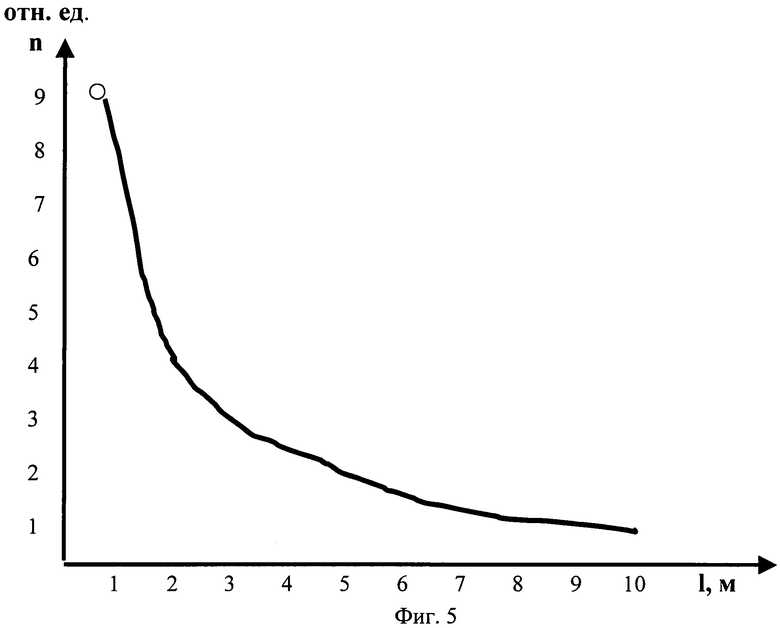
фиг.5 - зависимость отношения максимальных значений амплитуд сигналов детекторов 2 и 1 от расстояния между источником и поверхностью детектора 2 при величине смещения а, равной 2 м.
При контроле неподвижных (фиг.1) объектов (территорий, сооружений) способ реализуется с помощью детекторов 1 и 2, установленных в транспортном средстве 3, движущемся в направлении х относительно объекта контроля, например, проезжей части территории населенного пункта, где могут находиться радиационные источники 4, 5 (локальные радиоактивные загрязнения и т.п.). Детекторы 1, 2 смещены друг относительно друга по направлению движения транспорта на расстояние b, a в перпендикулярном направлении - на расстоянии а. При контроле движущихся объектов, например железнодорожных вагонов 6, 7 (фиг.2), детекторы расположены со смещениями а, b на определенных расстояниях от поверхности вагонов. В обоих случаях детекторы подвижны относительно объектов контроля.
В качестве детекторов 1, 2 используются высокочувствительные сцинтилляционные детекторы объемом 5-20 л. При контроле территорий детекторы устанавливают на транспортном средстве, например, а/м «Газель». При контроле подвижных объектов, например железнодорожных вагонов, детекторы устанавливают вблизи путей, по которым следуют объекты. Детекторы смещены друг относительно друга (фиг.1, 2) в направлении, перпендикулярном направлению движения на определенное расстояние (1-2 м). При установке детекторов на плавательных средствах это смещение может достигать 8-10 м. Сигналы детекторов, пропорциональные частоте следования импульсов, через интерфейсный блок, например аналого-цифровой преобразователь, поступают в компьютер, непрерывно обрабатывающий поступающую информацию в соответствии с предлагаемым способом. Местоположение транспорта с детекторами фиксируется навигационной системой «GPS». Зона контроля осматривается телекамерой, связанной с компьютером. При обнаружении источника запоминается изображение объекта, в том числе встречного транспорта.
Способ реализуется следующим образом. При обследовании территорий транспортное средство 3 с детекторами 1, 2 (фиг.1) движется по заданному маршруту с определенной скоростью (20-25 км/ч). Сигналы детекторов, амплитуда которых пропорциональна уровню естественного фона обследуемой территории, непрерывно регистрируются компьютером и отображаются на мониторе. Имеются каналы регистрации, в которых из текущих значений сигналов детекторов вычитается сигнал, соответствующий уровню естественного фона. При отсутствии источников в зоне контроля в этих каналах регистрации сигнал близок к нулю (имеются только флуктуации сигнала относительно нуля). В случае появления источника в зоне контроля сигнал детекторов за вычетом фона (фиг.3, 4) превышает некоторый порог, превышающий амплитуду флуктуации фона. Это свидетельствует об обнаружении источника, и система регистрации вырабатывает соответствующий сигнал; одновременно фиксируются координаты транспорта с детекторами и изображение контролируемого объекта.
Вследствие того, что детекторы 1, 2 в момент обнаружения находятся на разных расстояниях до источника, их сигналы отличаются друг от друга при движении транспорта относительно источника. Если источник 4 расположен справа от траектории движения, то сигнал детектора 2 будет превышать сигнал детектора 1 (фиг.3, 4). Если же источник 5 расположен с противоположной стороны транспорта, то сигнал детектора 1 будет превышать сигнал детектора 2. Измеряя амплитуду сигналов детекторов и сравнивая их друг с другом, определяют, с какой стороны транспорта находится обнаруженный источник. Вычисляя отношение амплитуды большего сигнала к амплитуде меньшего сигнала (фиг.5), определяют расстояние от обнаруженного источника до детектора, т.е. его местоположение в зоне контроля. Отношение амплитуд сигналов определяют следующим образом:
 ,
,
где l - расстояние от источника до ближайшего детектора; а - расстояние между детекторами в направлении, перпендикулярном направлению движения транспорта.
Расстояние l определяется с учетом (1)
 ,
,
Мощность источника (мощность дозы его излучения на расстоянии 1 м) определяется как
 ,
,
где Р - мощность дозы излучения источника на поверхности ближайшего к нему детектора;
Р=А/ε, где А - амплитуда сигнала детектора, ε=ΔA/ΔP (ΔA - приращение амплитуды сигнала детектора на единичное приращение мощности дозы ΔP).
Таким образом при обнаружении источника определяется его местонахождение в зоне контроля (справа или слева от траектории движения, расстояние до ближайшего детектора), а также его мощность по амплитуде сигнала и величине указанного расстояния. Это позволяет оценить опасность источника и своевременно принять меры по его локализации и обезвреживанию.
В случае если источник находится во встречном транспорте, то амплитуда сигнала детектора 1 будет превышать амплитуду сигнала детектора 2 (фиг.1), а длительность сигнала детектора 1 на половине его высоты составляет 2l/(V1+V2), где l - расстояние от источника до детектора 1, V1 - скорость транспорта с детекторами, V2 - скорость встречного транспорта. На практике величина l составляет 1,5-2 м, V1 - 20-30 км/ч, V2 - 60-90 км/ч. Поэтому длительность сигнала детектора, смещенного к середине проезжей части от источника во встречном транспорте, не превышает 0,2 с. Длительность сигналов от других источников существенно выше (более 1 с). В связи с этим можно задать порог по длительности сигнала, например, 0,5 с. В случае если длительность сигнала детектора 1 меньше этого порога, а амплитуда этого сигнала превышает амплитуду сигнала 2, то это свидетельствует об обнаружении источника во встречном транспорте. Изображение этого транспорта может быть зарегистрировано по команде обнаружения источника с помощью телекамеры, подключенной к компьютеру. Это дает возможность в дальнейшем локализовать указанный транспорт и обезвредить источник.
Пример 1.
Способ реализуется для обследования территории вблизи автомобильной дороги. В качестве детекторов используются пластиковые сцинтилляторы объемом 10 л. При уровне естественного фона 0,1 мкЗв/ч средняя скорость счета импульсов детекторов составляет 2000 имп/с. Это соответствует амплитуде аналогового сигнала 0,2 В. Коэффициент ε в (3) составляет 2 мВ/нЗв/ч. Смещение а между детекторами (фиг.1) равно 2 м, а расстояние в - 3 м. Скорость движения транспорта с детекторами составляет 30 км/ч. Порог обнаружения установлен на уровне 40 мВ, что соответствует приращению мощности дозы излучения 20 нЗв/ч над фоном. В процессе движения транспорта с детекторами зафиксировано превышение порога, что соответствует обнаружению источника радиации в зоне контроля, простирающейся вдоль траектории движения транспорта. Сигнал детектора 1 за вычетом фона составил 50 мВ, а детектора 2 450 мВ. Отношение n=9, что соответствует расположению источника справа от траектории движения транспорта на расстоянии l=1 м (2). Мощность источника, определяемая из выражения (3), составила 225 нЗв/ч на расстоянии 1 м, т.е. 0,22 мкЗв/ч. Таким образом предлагаемый способ обеспечил не только обнаружение источника в зоне контроля, но и определение его местоположения (на обочине дороги), а также его мощности (0,22 мкЗв/ч).
Способ-прототип, в котором не производится регистрация излучения детекторами, смещенными в направлении, перпендикулярном траектории движения транспорта, позволяет обнаружить указанный выше источник, однако определить его местоположение и мощность в прототипе не возможно. Это может быть источник, расположенный и справа, и слева от траектории движения транспорта, при этом не определена удаленность источника от упомянутой траектории и, как следствие, не ясно, какова его мощность.
Пример 2
При тех же условиях, что и в примере 1, только сигнал детектора 1 за вычетом фона составил 90 мВ, а сигнал детектора 2 - 100 мВ. Величина n=1,11, что соответствует расположению источника справа от траектории движения на расстоянии l=37,7 м. Мощность дозы источника составляет 71,1 мкЗв/ч на расстоянии 1 м. Этот источник представляет значительную опасность, и требуются незамедлительные меры по его локализации и обезвреживанию.
В способе-прототипе не удается определить местоположение источника и степень его опасности.
Пример 3
При тех же условиях, что и в примере 1, зафиксирован сигнал детектора 1 за вычетом фона амплитудой 600 мВ, а детектора 2 - 150 мВ. Длительность сигнала детектора 1 составила 0,2 с. Порог по длительности сигнала установлен равным 0,4 с. Указанные параметры сигналов соответствуют нахождению источника во встречном транспорте на расстоянии 2 м от детектора 1. Мощность дозы источника составляет 1,2 мкЗв/ч на расстоянии 1 м. При появлении сигнала обнаружения фиксируется изображение встречного транспорта и определяется его идентифицированный номер. В дальнейшем указанный транспорт задерживается и предпринимаются меры по обезвреживанию источника.
Способ-прототип не позволяет однозначно трактовать обнаружение источника во встречном транспорте, т.к. сигнал обнаружения может соответствовать источнику, расположенному на территории вблизи траектории движения транспорта с детекторами.
Пример 4
Детекторы 1 и 2 установлены в зоне движения транспортных средств (вагонов) по параллельным путям (фиг.2). Смещение а равно 2 м, в - 3 м, расстояние от поверхности вагонов до детекторов - 1,5 м. В процессе контроля зафиксированы сигнал детектора 1 - 240 мВ, сигнал детектора 2 - 60 мВ. В соответствии с предлагаемым способом фиксируется, что источник находится в вагоне 6 (фиг.2) на расстоянии 2 м от детектора 2, т.е. на глубине 0,5 м от наружной поверхности вагона, обращенной к детекторам. Мощность дозы источника составляет не менее 0,5 мкЗв/ч на расстоянии 1 м.
Способ-прототип не имеет возможности определить, в каком из вагонов (6 или 7, см. фиг.2) находится источник, на каком расстоянии от поверхности вагона, и какова мощность источника.
Таким образом, предлагаемый способ обеспечивает повышение надежности контроля за счет обеспечения возможности определения в процессе контроля местоположения и мощности источника и надежной фиксации событий, связанных с нахождением источника в движущемся транспорте, в том числе во встречном.
Литература
1. RU 2094821, Бюллетень №30 от 27.10.77.
2. Н.П.Валуев, Ю.В.Мойш, В.М.Качалов, Н.В.Никоненков. Автоматизированные системы радиационного контроля сырья и металлолома. Проблемы черной металлургии и материаловедения, 2009, №3, с.107-110.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамического радиационного контроля | 2020 |
|
RU2738661C1 |
| СПОСОБ ДИНАМИЧЕСКОГО РАДИАЦИОННОГО КОНТРОЛЯ | 2009 |
|
RU2436120C2 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2317570C1 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ СЫРЬЯ И МАТЕРИАЛОВ В ТРАНСПОРТНЫХ СРЕДСТВАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2142145C1 |
| Способ обнаружения и локализации подвижных источников ионизирующих излучений | 2018 |
|
RU2680671C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2011 |
|
RU2456638C1 |
| УСТРОЙСТВО ДЛЯ РАДИАЦИОННОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2007 |
|
RU2390040C2 |
| СПОСОБ И СИСТЕМА ДОСМОТРА АВТОМОБИЛЬНОГО И ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА БЕЗ ПРОНИКНОВЕНИЯ ВНУТРЬ ГРУЗОВОГО ПРОСТРАНСТВА | 2013 |
|
RU2610930C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ СЛАБЫХ ПОТОКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2006 |
|
RU2293999C1 |
Изобретение относится к области охраны окружающей среды, более конкретно к способам выявления радиоактивных источников на обследуемой территории и в движущихся объектах. Способ предусматривает использование, по крайней мере, двух детекторов, смещенных друг относительно друга в направлении, перпендикулярном относительному движению объекта контроля и детекторов. Измеряется амплитуда и длительность сигналов детекторов, по соотношению которых находится местоположение и мощность обнаруженного источника. Технический результат - обнаружение источника радиации во встречном транспорте. 1 з.п. ф-лы, 5 ил.
1. Способ динамического радиационного контроля, включающий непрерывную регистрацию ионизирующего излучения, по крайней мере, двумя детекторами в процессе перемещения объекта контроля и детекторов относительно друг друга, фиксацию моментов превышения сигналами детекторов заданного порога, по которым судят об обнаружении источника в зоне контроля, отличающийся тем, что в процессе контроля детекторы смещены относительно друг друга в направлении, перпендикулярном направлению относительного перемещения детекторов и объекта контроля, а при обнаружении источника определяют максимальные значения амплитуд сигналов детекторов, соответствующих появлению источника в зоне контроля, за вычетом средних значений сигналов, соответствующих окружающему фону, сравнивают упомянутые максимальные значения амплитуд сигналов каждого детектора, определяют детектор, которому соответствует сигнал большей амплитуды, вычисляют отношение n сигнала большей амплитуды к сигналу меньшей амплитуды, по указанному отношению судят о местоположении источника в зоне контроля, причем расстояние l от источника до детектора, которому соответствует сигнал большей амплитуды, определяют из соотношения
 ,
,
где а - расстояние между детекторами в направлении, перпендикулярном направлению относительного перемещения детекторов и объекта контроля.
2. Способ по п.1, отличающийся тем, что при контроле с помощью детекторов, установленных на транспортном средстве, перемещающемся по автомобильным дорогам, измеряют длительность сигналов детекторов, соответствующих обнаруженному источнику, сравнивают измеренную длительность с пороговой величиной и в случае, если длительность сигнала большей амплитуды меньше пороговой величины, а амплитуда сигнала детектора, смещенного к середине проезжей части, превышает амплитуду сигнала детектора, смещенного к обочине, судят об обнаружении источника во встречном транспорте.
| СПОСОБ ВЫЯВЛЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2094821C1 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ СЫРЬЯ И МАТЕРИАЛОВ В ТРАНСПОРТНЫХ СРЕДСТВАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2142145C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ИСТОЧНИКА ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ В ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 1998 |
|
RU2142644C1 |
| JP 2010112826 A, 20.05.2010. | |||

