Настоящее изобретение относится к выполненному согласно ограничительной части пункта 1 формулы изобретения зажимному патрону.
Зажимные патроны рассматриваемого здесь типа служат для зажатия в определенном положении паллет (спутников) или держателей деталей. При этом соответствующий зажимной патрон монтируется, как правило, неподвижно на столе обрабатывающего станка, в то время как паллета может с возможностью точного повторения зажиматься на зажимном патроне. В то время как паллета снабжена зажимной цапфой, зажимной патрон имеет приемное отверстие и зажимное устройство для зажатия зажимной цапфы в приемном отверстии. Паллета удерживает, по меньшей мере, одну обрабатываемую деталь или инструмент.
Для того чтобы была возможность использовать такой зажимной патрон при протекающих полуавтоматически или автоматически рабочих процессах, паллета должна при помощи робота-манипулятора подаваться к зажимному патрону и также снова сниматься с него. При этом важно, чтобы паллета зажималась с минимальным зажимным усилием на зажимном патроне, и зажимные органы зажимного патрона были также снова полностью освобождены или деблокированы перед снятием паллеты. Если паллета зафиксирована, например, неправильно на зажимном патроне, то существует опасность вибраций или даже того, что она при механической обработке зажатой на ней детали, например во время процесса фрезерования, отсоединится, что может привести к существенным сопутствующим повреждениям. Если держатель детали должен после процесса обработки сниматься с зажимного патрона, то должно быть снова обеспечено, что механизм блокировки полностью деблокирован, то есть полностью ослаблен, так что держатель детали может без сопутствующих повреждений сниматься с зажимного патрона. Следует понимать, что снятие держателя детали при не полностью деблокированных зажимных элементах может также привести к сопутствующим повреждениям со значительными последующими расходами.
Из EP 2 052 808 A1 известно зажимное устройство с зажимным патроном для разъемной фиксации держателя детали. Зажимной патрон снабжен механизмом блокировки, который включает в себя несколько зажимных элементов, которые в положении блокировки входят в зацепление с соединенной с держателем детали зажимной цапфой. Каждый зажимной элемент снабжен сквозным отверстием, которое при правильной блокировке соответствующего зажимного элемента закрыто с одной стороны. Дополнительно или альтернативно с каждым зажимным элементом согласован снабженный сквозным отверстием исполнительный элемент, сквозное отверстие которого при правильной блокировке и/или деблокировке соответствующего зажимного элемента закрыто с одной стороны. Сквозные отверстия зажимных элементов или исполнительных элементов соединены общей соединительной линией с пневматическим источником. На соединительной линии предусмотрен, по меньшей мере, один датчик для регистрации потока воздуха. При помощи датчика может обнаруживаться, были ли зажимные элементы правильно деблокированы или заблокированы. Датчик соединен с электронным устройством управления и оценки.
Несмотря на то, что подобное зажимное устройство хорошо зарекомендовало себя на практике, было бы желательным, если зарегистрированный датчиком или несколькими датчиками параметр/данные могли бы передаваться дальше для сбора, оценки или дальнейшей обработки простым образом на точку передачи.
Далее из EP 2 759 372 A1 известно зажимное устройство для станка. Станок имеет вращающийся шпиндель с гнездом для инструмента. Для зажатия инструмента предусмотрено зажимное устройство. Для того чтобы обнаруживать правильное или неправильное зажатие инструмента в гнезде инструмента, зажимное устройство имеет на различных местах измерений датчики усилия, для того чтобы регистрировать действующие в каждом случае на различных местах измерений зажимные усилия. Датчики усилия расположены на кольцеобразной поверхности прилегания гнезда инструмента. Датчики выступают при этом над поверхностью прилегания таким образом, что они при зажатии инструмента сдавливаются. Таким образом, с одной стороны должна иметься возможность для регистрации зажимного усилия, и должно обнаруживаться то, правильно ли зажат инструмент, или при необходимости имеется ли ошибочная ориентация и/или ошибочное позиционирование. В качестве датчиков усилия используются ПАВ-датчики (датчики на основе поверхностных акустических волн). Датчики усилия расположены на поверхности прилегания осесимметрично вокруг средней оси станка. При правильной ориентации инструмента датчики усилия регистрируют равновеликие зажимные усилия, в то время как при зажатом под наклоном инструменте датчиками усилия регистрируются различные по величине зажимные усилия. Электрические сигналы датчиков передаются беспроводным образом на блок приема и передачи и анализируются в блоке оценке.
Наконец, EP 2 457 688 A1 раскрывает способ для позиционирования и фиксации деталей. При помощи шагов способа может обнаруживаться наличие или отсутствие деталей или держателей деталей.
Задача изобретения состоит в создании относящегося к вышеуказанной технической области зажимного патрона, который делает возможным то, что один или несколько параметров, в частности таких параметров, которые контролируют или сигнализируют о зажатии и/или прилегании и/или освобождении паллеты, могут надежно регистрироваться и передаваться на приемник, без того чтобы для этого должны иметься в наличии линии передачи данных.
Решение задачи определено признаками пункта 1 формулы изобретения. Согласно изобретению зажимной патрон, служащий для зажатия снабженных зажимной цапфой паллет, имеет приемное отверстие для зажимной цапфы и снабжен имеющим зажимные органы зажимным устройством для зажатия зажимной цапфы в приемном отверстии, причем на зажимном патроне расположен, по меньшей мере, один датчик, при помощи которого может регистрироваться, по меньшей мере, один параметр зажимного патрона и/или паллеты и/или взаимодействия между паллетой и зажимным патроном, и причем зажимной патрон снабжен передатчиком для беспроводной передачи определенных датчиком, соответственно, датчиками параметров.
Благодаря тому, что зажимной патрон снабжен передатчиком для беспроводной передачи определенных датчиком, соответственно, датчиками параметров, выявленные параметры могут приниматься и оцениваться на удалении от зажимного патрона, без того чтобы для этого должны иметься в наличии линии передачи данных. Переданные данные могут приниматься приемником и передаваться оттуда далее на любые дальнейшие устройства, как например электронную точку передачи. Это с одной стороны предпочтительно в отношении автоматизированных производственных процессов, при которых паллеты вставляются и вынимаются роботом-манипулятором, так как данные измерений могут передаваться с точки передачи в виде команд управления роботу. С другой стороны актуальные параметры, как например правильное зажатие паллеты в зажимном патроне, могут непрерывно контролироваться и/или анализироваться и при необходимости связываться с дальнейшими параметрами.
Предпочтительные варианты осуществления и предпочтительные усовершенствования зажимного устройства описаны в зависимых пунктах формулы изобретения.
Так в предпочтительном усовершенствовании предусмотрено, что зажимной патрон снабжен первым датчиком, при помощи которого может определяться действующее на зажимную цапфу зажимное усилие. Через действующее на зажимную цапфу зажимное усилие может делаться качественный вывод в отношении правильного зажатия паллеты, что с точки зрения автоматизированного рабочего процесса является предпочтительным и одновременно гарантирует повышенную надежность.
Предпочтительно первый датчик выполнен и расположен на зажимном патроне таким образом, что при зажатии паллеты могут измеряться упругие деформации в материале зажимного патрона. Измерение упругой деформации в материале зажимного патрона представляет собой наиболее простую возможность, для того чтобы делать выводы в отношении зажимного усилия, то есть того усилия, с которым паллета зажата на зажимном патроне.
Наиболее предпочтительно зажимной патрон снабжен вторым датчиком, при помощи которого может обнаруживаться прилегание паллеты к зажимному патрону. Обнаружение прилегания паллеты к зажимному патрону является снова предпочтительным с точки зрения автоматизированного рабочего процесса, так как зажимному патрону может тем самым выдаваться, например, разрешение для зажатия паллеты.
В дальнейшем предпочтительном усовершенствовании зажимной патрон снабжен третьим датчиком, при помощи которого может обнаруживаться положение служащего для приведения в действие зажимных органов элемента. Вследствие этого может определяться, находятся ли зажимные органы в положении деблокировки, что важно с точки зрения автоматизированной смены паллет, так как паллета может или должна сниматься только в том случае, если указанный элемент не прижимает зажимные органы в положение зажатия.
В наиболее предпочтительном усовершенствовании второй датчик расположен в области верхней стороны зажимного патрона таким образом, что может обнаруживаться прилегание паллеты. Это расположение датчика является наиболее предпочтительным, тем более что такой датчик может быть сравнительно просто расположен и выполнен.
Предпочтительное усовершенствование зажимного патрона предусматривает то, что его зажимное устройство снабжено перемещаемым между исходным положением и положением блокировки исполнительным поршнем для приведения в действие зажимных органов, причем исполнительный поршень сдвигает зажимные органы в положении блокировки в радиальном направлении вовнутрь, так что они прикладываются с силовым замыканием к зажимной цапфе, и причем третий датчик расположен внутри зажимного патрона таким образом, что может обнаруживаться положение находящегося в исходном положении исполнительного поршня. При помощи датчика может в любом случае надежно обнаруживаться, смещен ли исполнительный поршень в исходное положение, так что также зажимные органы находятся в открытом положении или могут, по меньшей мере, отодвигаться в открытое положение. Кроме того, при помощи датчика сравнительно просто выявлять определенное положение исполнительного поршня, в частности, его исходное положение.
Наиболее предпочтительно первый датчик является датчиком на основе тензорезисторов (DMS). Тензометрические датчики сравнительно экономичны, обладают высокой разрешающей способностью и создают условия для очень точных результатов измерений.
Предпочтительно первый датчик установлен, по меньшей мере, с силовым замыканием, наиболее предпочтительно, по меньшей мере, с силовым замыканием и замыканием материала на зажимном патроне, так что его сигнал по существу пропорционален зажимному усилию. Вследствие этого может напрямую делаться вывод в отношении зажимного усилия.
В высшей степени предпочтительно первый датчик расположен в радиальном направлении между пересекающей Z-опоры для паллеты линией окружности и приемным отверстием зажимного патрона. Это расположение оказалось наиболее предпочтительным в отношении высокой разрешающей способности и высокой точности измерений.
Дальнейшее, наиболее предпочтительное усовершенствование предусматривает то, что зажимной патрон снабжен полым, цилиндрическим выступом, который ограничивает в радиальном направлении приемное отверстие, причем выступ снабжен радиальными отверстиями, в которых зажимные органы удерживаются в Z-направлении с геометрическим замыканием. Это исполнение с одной стороны очень прочно и устойчиво, а с другой стороны тем самым отказывается содействие пропорциональной зажимному усилию упругой деформации в материале той области, в которой расположен первый датчик.
Предпочтительно исполнительный поршень может перемещаться при помощи нажимных пружин в положение блокировки и пневматически против усилия нажимных пружин в исходное положение. Благодаря этому исполнению обеспечивается, что даже при выходе из строя пневматики паллета надежно зажата и остается на зажимном патроне.
В дальнейшем предпочтительном усовершенствовании зажимного патрона предусмотрено, что в зажимной патрон интегрировано микропроцессорное устройство управления, при помощи которого определенные датчиками данные перед передачей на передатчик анализируются и/или подготавливаются. Это исполнение позволяет наиболее простую последующую обработку измеренных данных.
Наконец, зажимной патрон имеет согласно предпочтительному усовершенствованию электропитание, в частности в виде батарей или аккумуляторов. Тем самым могут запитываться передатчик и датчик(и) и при необходимости дальнейшие электрические или электронные компоненты. Такой зажимной патрон может в этом отношении эксплуатироваться автономно, благодаря тому, что он не должен подключаться к источнику напряжения.
Из последующего подробного описания и формулы изобретения проистекают дальнейшие предпочтительные варианты осуществления и комбинации признаков изобретения.
Используемые для разъяснения примера осуществления фигуры показывают:
фиг.1 - зажимной патрон вместе с паллетой на изображении в перспективе;
фиг.2 - зажимной патрон вместе с установленной на нем паллетой на виде сверху;
фиг.3 – обобщенный зажимной патрон в разрезе по линии A-A на фиг.2;
фиг.4 - зажимной патрон на упрощенном изображении вместе со снятой паллетой в разрезе по линии A-A на фиг.2;
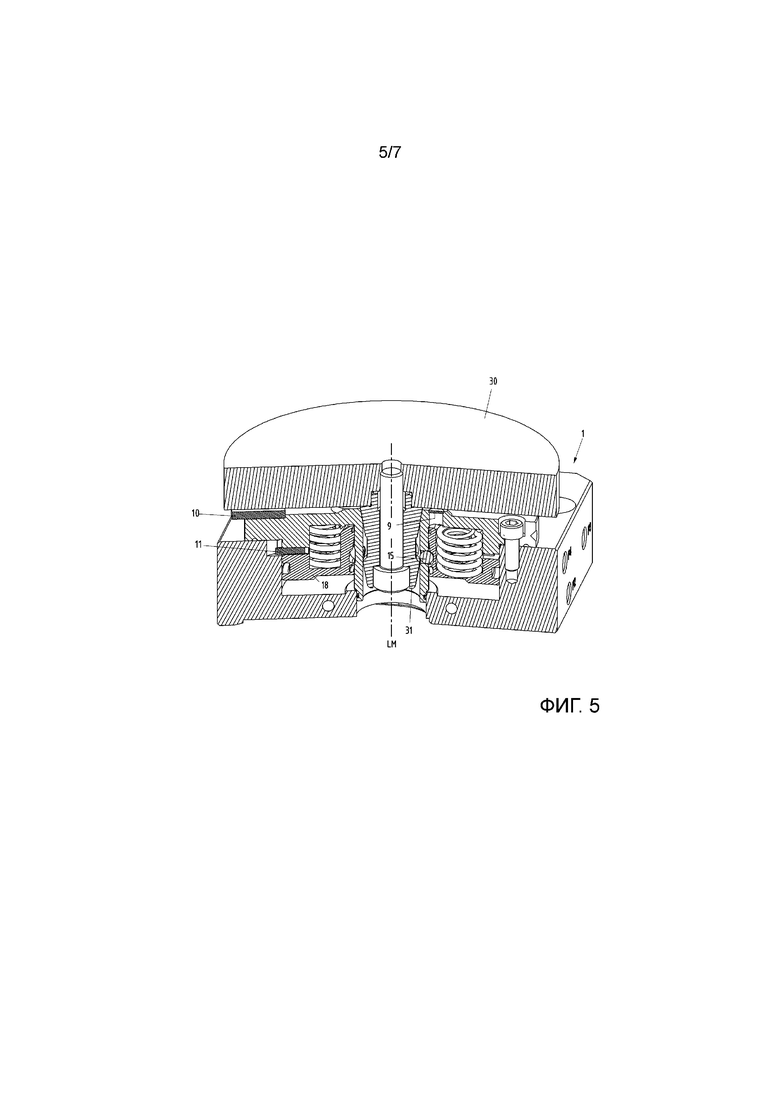
фиг.5 – обобщенный зажимной патрон вместе со свободно насаженной паллетой;
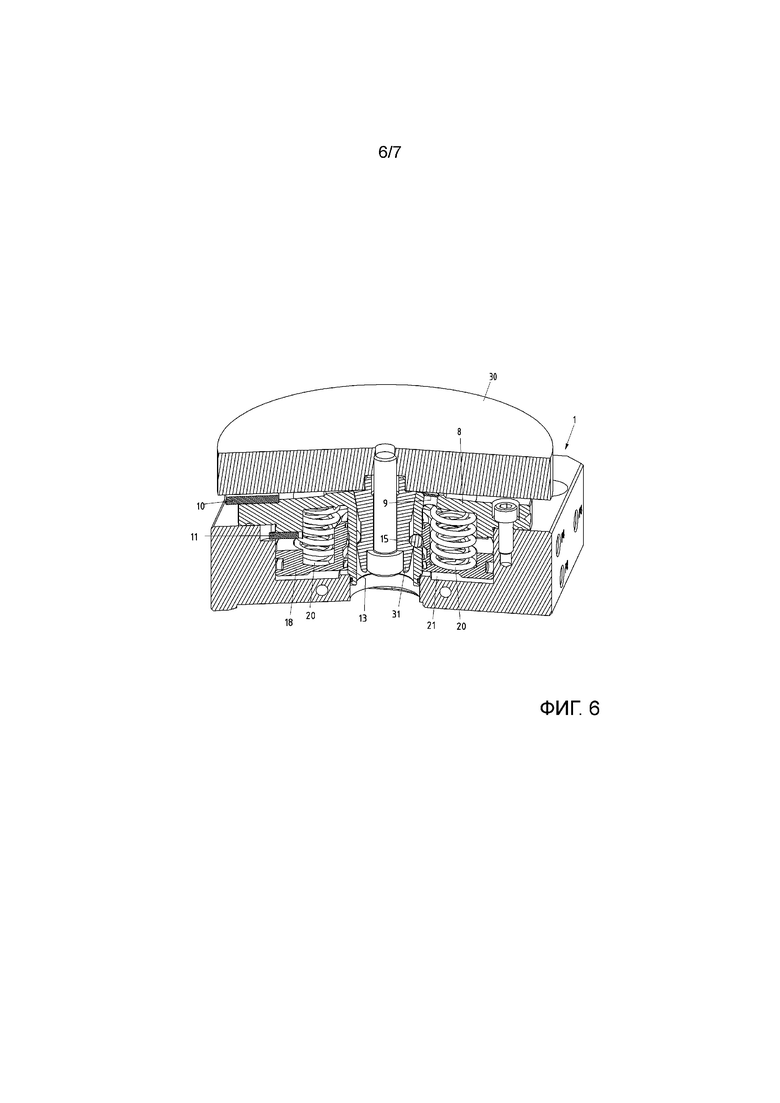
фиг.6 – обобщенный зажимной патрон вместе с зажатой на нем паллетой; и
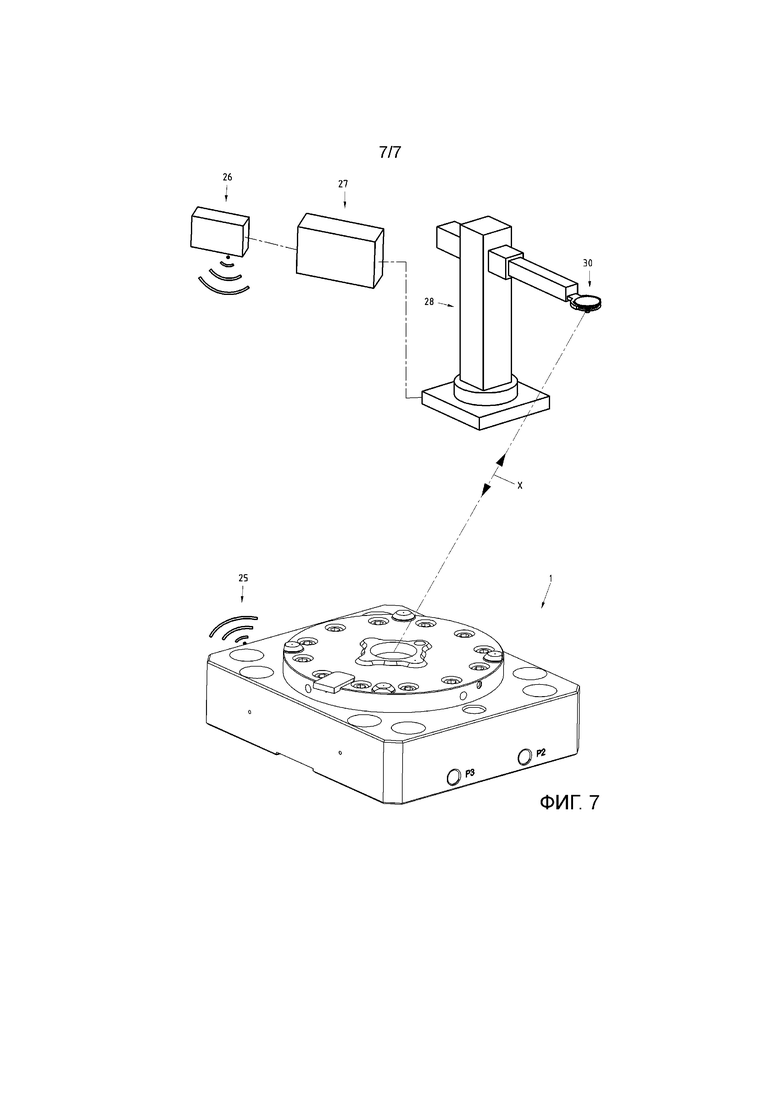
фиг.7 - зажимной патрон вместе с приемником, шлюзом и роботом.
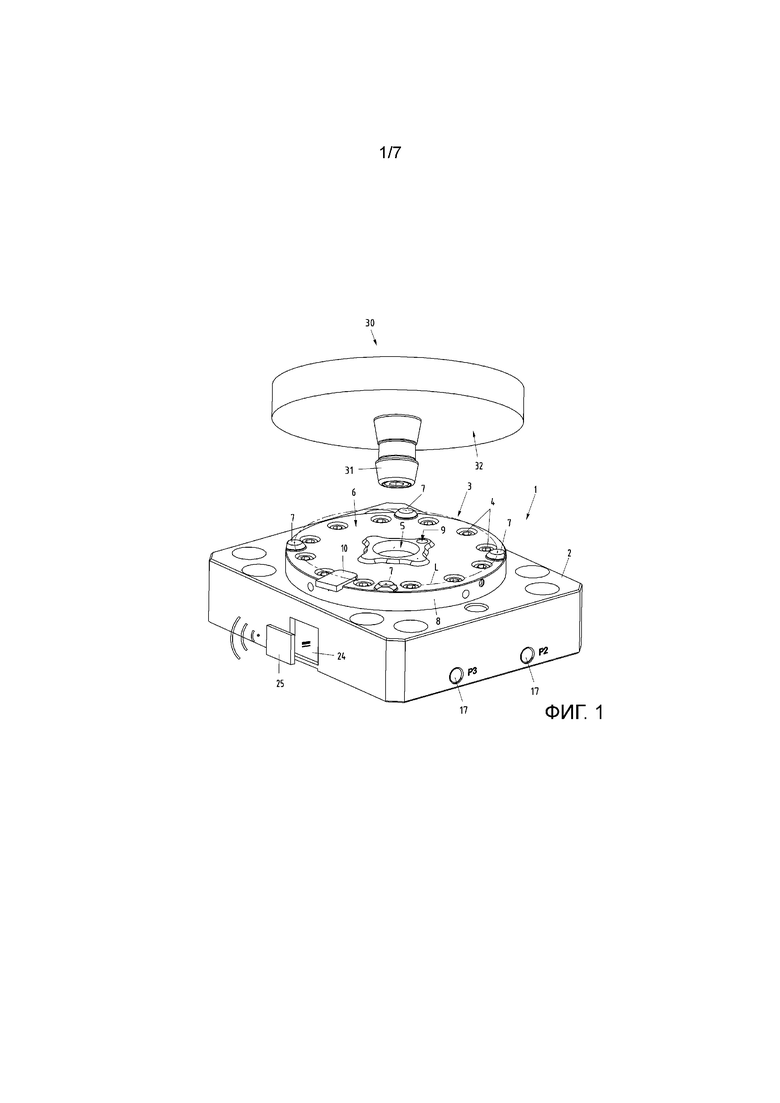
Фиг.1 показывает зажимной патрон 1 вместе с паллетой 30 на виде в перспективе. Зажимной патрон 1 включает в себя по существу опорную плиту 2 и вкладной внутренний элемент 3, в то время как паллета 30 снабжена зажимной цапфой 31 для зажатия во вкладном внутреннем элементе 3. Вкладной внутренний элемент 3 соединен множеством крепежных винтов 4 с опорной плитой 2. Внутренний элемент 3 зажимного патрона 1 снабжен приемным отверстием 5 для зажимной цапфы 31. На верхней стороне 6 вкладной внутренний элемент 3 снабжен круглой замыкающей пластиной 8, на которой расположены четыре круглых поверхности 7 прилегания, которые образуют Z-опору для паллеты 30. Z-опоры 7 выступают над плоской верхней стороной 6 вкладного внутреннего элемента 3. Паллета 30 имеет плоскую нижнюю сторону 32, которой она упирается при зажатии на зажимном патроне 1 в Z-опоры 7. Каждая из этих Z-опор 7 снабжена продувным отверстием. Как правило, у такого зажимного патрона 1 X-Y-плоскость проходит параллельно к верхней стороне/поверхности 6 зажимного патрона 1, в то время как Z-направление проходит под прямым углом к ней. Z-направление проходит одновременно параллельно к продольной средней оси приемного отверстия 5. Для центрирования паллеты 30 в X-Y-направлении предусмотрены не изображенные более подробно средства центрирования. Выражение "паллета" является здесь заменителем для любых типов держателей, на которых может закрепляться, например, инструмент или обрабатываемая деталь.
В области верхней стороны 6 зажимного патрона 1 расположен первый, схематично изображенный датчик 9, который установлен в утопленном в верхнюю замыкающую пластину 8 отверстии. Этот первый датчик 9 выполнен и соединен с зажимным патроном 1 или верхней замыкающей пластиной 8 таким образом, что им могут измеряться упругие деформации в материале зажимного патрона 1, в частности верхней замыкающей пластины 8. Первый датчик 9 соединен с замыкающей пластиной 8, по меньшей мере, с силовым замыканием, предпочтительно с силовым замыканием и с замыканием материала и при необходимости с геометрическим замыканием, предпочтительно приварен или приклеен к ней. В радиальном направлении первый датчик 9 расположен между пересекающей Z-опоры 7 линией L окружности и приемным отверстием 5.
На верхней стороне зажимного патрона 1 расположен второй датчик 10, при помощи которого может обнаруживаться прилегание или наличие паллеты 30. Верхняя сторона этого второго датчика 10 расположена несколько ниже верхней стороны Z-опор 7, так что паллета 30 при насадке на зажимной патрон 1 не прилегает ко второму датчику 10. Зажимной патрон 1 имеет еще третий датчик, который на этом изображении не виден, однако разъясняется более подробно ниже.
Опорная плита 2 снабжена сбоку выемкой 24, которая служит для приема передатчика 25. Для электропитания передатчика 25 предусмотрены предпочтительно батареи или аккумуляторы, которые могут размещаться, например, в отдельном батарейном отсеке в опорной плите 2, причем ни батареи, ни батарейный отсек не изображены более подробно. При необходимости может также предусматриваться блок питания или устройство для преобразования энергии из окружающей среды (сбор энергии). Опорная плита 2 снабжена помимо этого боковыми разъемами 17, через которые сжатый воздух подводится для приведения в действие зажимного устройства, в частности для открытия зажимного устройства. Кроме того, сжатый воздух может использоваться для того, чтобы очищать посредством продувки поверхности прилегания и/или вызывать дополнительное зажатие зажимного устройства.
Фиг.2 показывает зажимной патрон 1 вместе с установленной на нем паллетой 30 на виде сверху. Благодаря этому изображению можно увидеть, как проходит разрез A-A для последующих изображений.
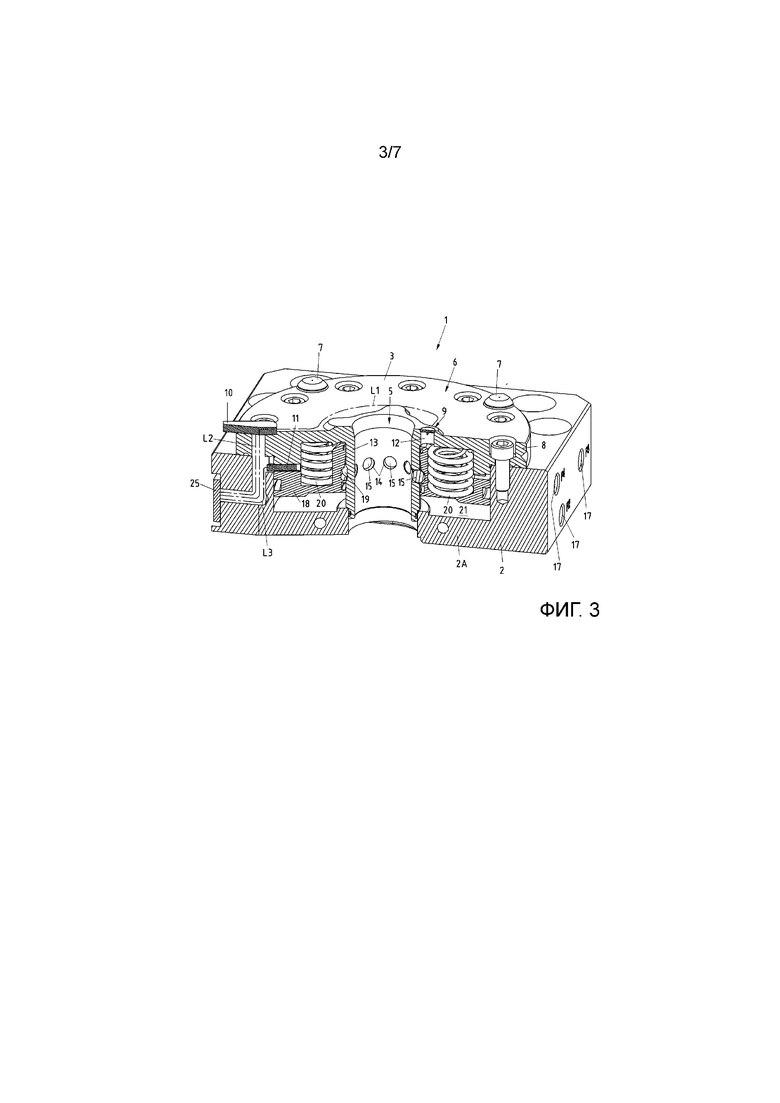
Фиг.3 показывает на изображении в перспективе зажимной патрон 1 в разрезе по линии A-A на фиг.2. Так как конструкция и принцип работы такого зажимного патрона 1 в принципе известны, например, из EP 1 344 599 A1, в дальнейшем рассматриваются в частности только некоторые или некоторые существенные составные элементы зажимного патрона 1. Центральное приемное отверстие 5 зажимного патрона 1 ограничивается полым цилиндрическим выступом 13, который выполнен за одно целое с замыкающей пластиной 8 и распространяется вертикально вниз в направлении дна 2A опорной плиты 2. Зажимной патрон 1 снабжен зажимным устройством, которое состоит по существу из нагруженного нажимными пружинами 20 исполнительного поршня 18 и зажимных органов в виде зажимных шариков 15. Полый цилиндрический выступ 13 снабжен радиальными отверстиями 14 для приема зажимных шариков 15. Зажимные шарики 15 упираются в осевом или Z-направлении в полый цилиндрический выступ 13. Приведение в действие зажимных шариков, то есть радиальный сдвиг зажимных шариков 15 осуществляется посредством исполнительного поршня 18, который нагружен нажимными пружинами 20 в направлении дна 2A опорной плиты 2. В опорной плите 2 расположена помимо этого нагнетательная камера 21, которая для перемещения исполнительного поршня 18 против усилия пружин 20 может нагружаться сжатым воздухом.
На этом изображении можно увидеть, что первый датчик 9 установлен в выполненном в замыкающей пластине 8 отверстии 12. Наряду со вторым датчиком 10 можно помимо этого увидеть третий датчик 11, который расположен на нижней стороне верхней замыкающей пластины 8 зажимного патрона 1. Этот третий датчик 11 служит для того, чтобы обнаруживать положение исполнительного поршня 18.
Первый датчик 9 выполнен и соединен с зажимным патроном 1 или верхней замыкающей пластиной 8 таким образом, что им могут измеряться упругие деформации в материале зажимного патрона 1, в частности верхней замыкающей пластины 8. Кроме того, можно увидеть, что первый датчик 9 расположен в радиальном направлении за пределами приемного отверстия 5, однако в пределах Z-опор 7.
Второй и третий датчик 10, 11 предпочтительно являются работающими индуктивно датчиками в виде индуктивных датчиков присутствия, при помощи которых может обнаруживаться положение паллеты и соответственно исполнительного поршня 18. Первый датчик 9 предпочтительно является датчиком на основе тензорезисторов, называемым далее DMS-датчиком, при помощи которого упругие деформации в материале зажимного патрона 1 могут измеряться, и тем самым могут делаться качественные суждения в отношении зажатия паллеты на зажимном патроне 1, как разъясняется в дальнейшем более подробно. Каждый из трех датчиков 9, 10, 11 соединен электрической линией L1, L2, L3 с передатчиком 25, причем указанные три линии L1, L2, L3 обозначены исключительно схематично. Передатчик 25 служит, в частности, для беспроводной передачи имеющихся на датчиках 9, 10, 11 сигналов. Несмотря на то, что здесь в каждом случае говорится лишь упрощенно о передатчике, передатчик 25 включает в себя предпочтительно также микропроцессорное устройство управления, при помощи которого сигналы датчиков первично обрабатываются и при необходимости дополняются дальнейшими данными, как например данными об уровне заряда батарей. Подготовленные сигналы датчиков передаются передатчиком 25 беспроводным путем.
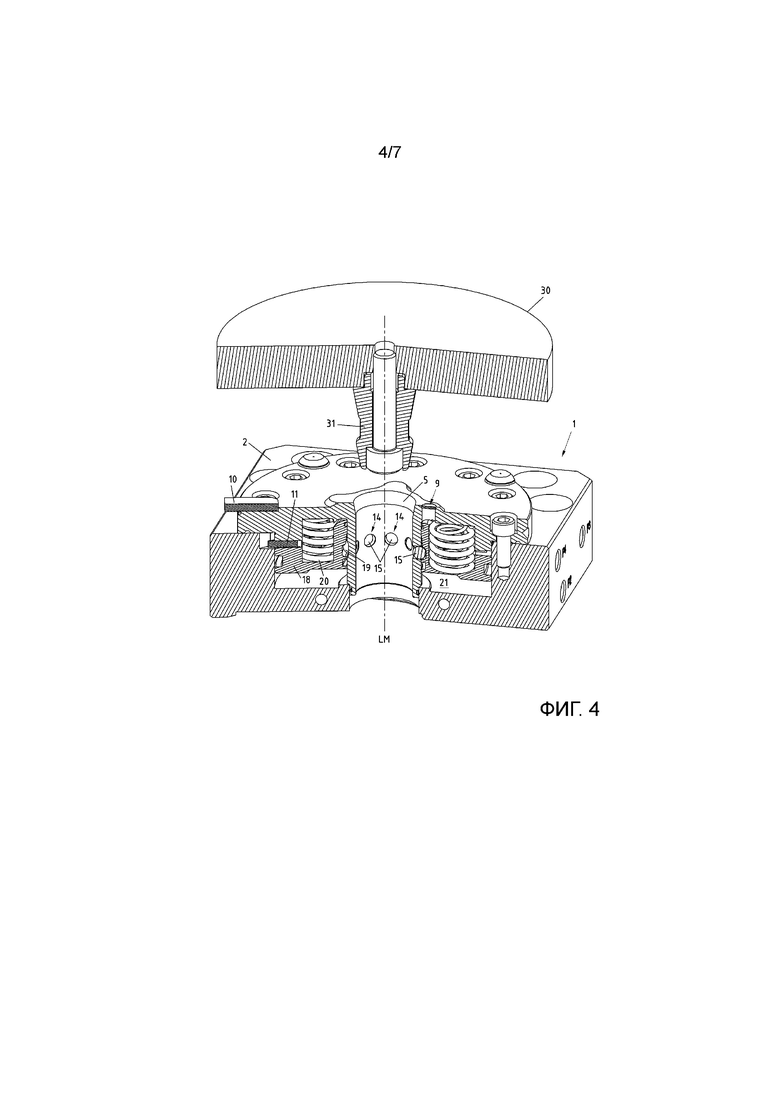
Фиг.4 показывает зажимной патрон 1 вместе со снятой паллетой 30 в разрезе по линии A-A на фиг.2, причем передатчик и соединительные линии не изображены. Чтобы зажимная цапфа 31 могла вводиться в приемное отверстие 5 настолько, что она может зажиматься в нем, исполнительный поршень 18 должен быть смещен в изображенное на фиг.4 верхнее положение - исходное положение. Для этого нагнетательная камера 21 пневматически нагружается соответствующим избыточным давлением. Вследствие этого зажимные шарики 15 могут настолько сдвигаться в радиальном направлении наружу, что они распространяются в образованное проходящим по периметру кольцевым пазом углубление 19 исполнительного поршня 18. Даже если зажимные шарики 15 при введении зажимной цапфы 31 распространяются при определенных условиях все еще в приемное отверстие 5, они оттесняются зажимной цапфой 31 поперек к продольной средней оси LM.
На изображении согласно фиг.4 третьим датчиком 11 обнаруживается, что исполнительный поршень 18 находится в своем верхнем положении, в то время как второй датчик 10 обнаруживает, что паллета 30 не прилегает к зажимному патрону 1. Таким образом, на третьем датчике 11 присутствует сигнал "1", в то время как на втором датчике 10 имеется сигнал "0". На первом датчике 9 присутствует сигнал, который пропорционален деформации зажимного патрона 1. Имеющиеся сигналы передаются передатчиком беспроводным путем на приемник (не изображен). Приемник может быть, например, частью системы управления станком, при помощи которой управляется робот-манипулятор (не изображен). На основе имеющихся на трех датчиках 9, 10, 11 и переданных на приемник сигналов может обнаруживаться фактическое состояние зажимного патрона 1. В данном случае обнаруживается, что зажимной патрон 1 находится в открытом положении, однако паллета 30 к нему не прилегает, а также паллета на нем не зажата. Таким образом, роботу-манипулятору может выдаваться разрешение для переноса паллеты 30 на зажимной патрон 1.
Фиг.5 показывает зажимной патрон 1 вместе с уложенной, но не зажатой в зажимном патроне 1 паллетой 30 в разрезе по линии A-A на фиг.2. Паллета 30 прилегает к зажимному патрону 1 свободно, то есть благодаря своему собственному весу и весу возможно закрепленной на ней обрабатываемой детали или инструмента. Исполнительный поршень 18 пребывает все еще в своем верхнем положении, в котором зажимные шарики 15 сдвинуты в радиальном направлении наружу. Вследствие этого зажимное усилие еще не оказывается зажимными шариками 15 на зажимную цапфу 31. Вторым датчиком 10 обнаруживается, что паллета 30 прилегает к зажимному патрону 1, в то время как третий датчик 11 снова обнаруживает, что исполнительный поршень 18 находится в своем верхнем положении. Таким образом, на втором датчике 10, как и на третьем датчике 11, присутствует сигнал "1". На первом датчике 9 снова присутствует сигнал, который пропорционален деформации зажимного патрона 1. Если паллета 30 прилегает свободно к зажимному патрону 1, то поддающаяся измерению или существенная деформация зажимного патрона 1 еще не происходит, что может обнаруживаться посредством имеющегося на первом датчике 9 сигнала. На основе имеющихся сигналов зажимному патрону 1 может выдаваться разрешение для зажатия паллеты 30.
Фиг.6 показывает зажимной патрон 1 вместе с зажатой на нем паллетой 30 в разрезе по линии A-A на фиг.2. Для того чтобы зажимать паллету 30 на зажимном патроне 1, преобладающее в нагнетательной камере 21 избыточное давление должно уменьшаться. Как только давление опускается ниже определенного минимального давления в нагнетательной камере 21, исполнительный поршень 18 прижимается под воздействием нажимных пружин 20 вниз. При этом зажимные шарики 15 прижимаются исполнительным поршнем 18 вовнутрь. Зажимные шарики 15 прикладываются при этом к уступу зажимной цапфы 31, вследствие чего она затягивается чуть дальше в приемное отверстие и зажимается в нем. Паллета 30 устойчиво упирается при этом своей нижней стороной в Z-опоры зажимного патрона 1. Под воздействием входящих в зацепление с зажимной цапфой 31 зажимных шариков 15 зажимной патрон 1 деформируется. Так как паллета 30 прилегает в области своей наружной стороны к Z-опорам, замыкающая пластина 8 прижимается в области середины упирающимися в полый цилиндрический выступ 13 в осевом направлении зажимными шариками 15 вверх в направлении прилегающей паллеты 30. Вследствие этого материал зажимного патрона 1 или замыкающей пластины 8 упруго деформируется, в частности, в средней области, что может измеряться первым датчиком 9. На фиг.6 эта деформация показана утрированно. Следует понимать, что также материал других областей зажимного патрона 1 упруго деформируется при зажатии паллеты 30. Однако испытания показали, что область, в которой расположен первый датчик 9, наиболее предпочтительным образом подходит, для того чтобы измерять упругую деформацию в материале зажимного патрона 1 и делать выводы об усилии вставки. В качестве усилия зажатия или вставки обозначается то усилие, с которым зажимная цапфа 31 втягивается вниз, то есть в приемное отверстие. На основе измеренной упругой деформации в материале с одной стороны усилие вставки может относительно точно определяться. С другой стороны может также делаться суждение, правильно ли и с достаточным ли зажимным усилием паллета 30 зажата на зажимном патроне 1. В любом случае первый датчик 9 предоставляет, по меньшей мере, приближенно пропорциональный зажимному усилию выходной сигнал. Соответствующие испытания показали, что зажимное усилие определяется с точностью в порядке величины в 0,3 кН, при зажимном усилии в порядке величины в 15 кН. Естественно зажимное усилие зависит от исполнения и размеров зажимного патрона. У больших зажимных патронов зажимное усилие может вполне составлять многократные указанные 15 кН, в то время как у меньших патронов создаются также соответственно меньшие зажимные усилия. Тем не менее вне зависимости от зажимного усилия, при помощи DMS-датчика указанного типа могут достигаться высокие разрешения, так что в итоге абсолютное зажимное усилие может определяться с высоким разрешением и точностью.
Фиг.7 схематично показывает соответствующий изобретению зажимной патрон 1 вместе с отдельными элементами/компонентами технологической линии. Наряду с зажимным патроном 1 изображены приемник 26, шлюз 27, а также робот-манипулятор 28, причем отдельные элементы изображены не в масштабе. Под общеизвестным и используемым прикладным термином "шлюз" обозначается точка передачи (интерфейс) в виде коммутационного аппарата, в частности, в виде коммутационного аппарата в вычислительных сетях. Захват робота-манипулятора 28 удерживает схематично изображенную паллету 30.
Размещенный в зажимном патроне 1 передатчик 25 передает данные измерений или имеющиеся на датчиках данные измерений на приемник 26, что схематично обозначено радиоволнами. Приемник 26 передает принятые данные дальше на шлюз 27. Шлюз 27 соединен со своей стороны с роботом-манипулятором 28. Шлюз 27 принимает первично обработанные микропроцессорным устройством управления передатчика 25 данные, как например патрон открыт, паллета отсутствует, паллета уложена, паллета зажата, паллета зажата с усилием 10 кН и т.д. На основе переданных данных шлюз 27 может выдавать роботу-манипулятору 28 команду, как например паллету 30 перенести на зажимной патрон 1 или паллету снять с зажимного патрона 1, что обозначено линией X со стрелками.
Если паллета зажата в зажимном патроне 1 не с минимальным зажимным усилием, то передатчиком 25 может выдаваться сообщение об ошибке. Альтернативно шлюз 27 может обнаруживать, что минимальное зажимное усилие не было достигнуто, и выдавать сообщение об ошибке и/или инициировать соответствующие меры.
Следует понимать, что фиг.7 показывает лишь примерное исполнение. Так выполненный согласно изобретению зажимной патрон может внедряться практически в любую производственную линию и объединяться в сеть с дальнейшими компонентами, как например системой управления или накопителем деталей - складом - или напрямую с обрабатывающим станком.
В случае необходимости выявленные сигналы могут также связываться друг с другом для принятия решения. Если, например, обнаруживается, что паллета прилегает, но не зажата, то зажимному патрону может выдаваться, например, разрешение для зажатия. С другой стороны роботу-манипулятору может выдаваться разрешение для снятия паллеты с зажимного патрона лишь в том случае, если паллета хоть и прилегает, но не зажата или больше не зажата.
В любом случае благодаря выполненному согласно изобретению зажимному патрону предоставляются самые разные возможности. Так наряду с уже указанными данными измерений могут определяться при необходимости дополнительные данные, благодаря тому, что предусматриваются, например дополнительные датчики. Например, мог бы предусматриваться дополнительный датчик, при помощи которого считываются и передаются сохраненные на паллете данные обработки. При необходимости мог бы также предусматриваться датчик для определения формы и/или размеров паллеты, что могло бы быть целесообразным, в частности, при больших зажимных системах с несколькими зажимными патронами. Выявленные данные могут также анализироваться самыми разными способами, например, благодаря тому, что определяются количество процессов зажатия для соответствующего зажимного патрона, изменение зажимного усилия, в частности, ослабевающее во времени зажимное усилие, и т.д. Для второго и третьего датчика могут использоваться, например, стандартные датчики присутствия, например, на механической, индуктивной, емкостной, оптической, ультразвуковой или магнитной основе. В качестве первого датчика альтернативно мог бы также использоваться пьезоэлектрический датчик.
При необходимости паллета могла бы снабжаться считываемым зажимным патроном чипом или тому подобным, на котором сохранены данные обработки, идентификационные коды и т.д.
Для передачи данных предпочтительно применяется стандартный интерфейс, как например Bluetooth. Стандартный интерфейс, такой как Bluetooth, имеет среди прочего также то преимущество, что переданные данные могут также другими приемниками, как например мобильным телефоном, карманным переносным компьютером (PDA) или стационарным компьютером, легко приниматься и дополнительно обрабатываться и/или передаваться дальше.
Следует понимать, что вышеуказанный пример осуществления не должен рассматриваться как исчерпывающий или всеобъемлющий. Так датчик для измерения усилия вставки мог бы располагаться также, например, на другом месте. Важным для датчика для измерения зажимного усилия является лишь то, что он размещен в месте, материал которого упруго деформируется при зажатии зажимной цапфы. Для контроля дальнейших параметров могут также еще дополнительные датчики предусматриваться на или в зажимном патроне. Например, мог бы устанавливаться датчик ускорения, при помощи которого зажимной патрон контролировался бы во время обработки детали в отношении имеющихся колебаний/вибраций. Также вполне возможно предусматривать датчик температуры. Данные дальнейших датчиков могли бы равным образом передаваться передатчиком беспроводным путем.
С другой стороны также вполне возможны "более простые" варианты выполненного согласно изобретению зажимного патрона, в которых Контролируется, например, лишь зажимное усилие, причем зажимное усилие не должно обязательно регистрироваться в абсолютном значении и с высоким разрешением, а наоборот при определенных условиях может быть достаточным зажимное усилие регистрировать и/или контролировать в ступенях, например в 2-10 ступенях, и передавать при помощи передатчика. Кроме того, также возможны варианты зажимного патрона, в которых регистрируются лишь два параметра. Так возможны случаи применения, в которых регистрируется и/или контролируется, например, зажимное усилие, и помимо этого может регистрироваться прилегание паллеты. Вместо наличия четырех круглых Z-опор могли бы естественно также предусматриваться три или более четырех поверхностей прилегания, причем поверхности прилегания могли бы быть также выполнены не обязательно круглыми, а например овальными.
Некоторые преимущества выполненного согласно изобретению зажимного патрона кратно обобщены ниже:
- Можно контролировать и передавать беспроводным способом на удаленное место различные параметры взаимодействия между паллетой и зажимным патроном и/или самого зажимного патрона и при необходимости паллеты;
- Переданные данные могут регистрироваться, сохраняться и удаленно анализироваться;
- Параметры могут непрерывно контролироваться;
- Измерение определенных параметров повышает надежность процесса, причем, в частности, непрерывный контроль усилия вставки открывает в этом отношении новые возможности;
- Может обнаруживаться, уложена ли паллета на зажимной патрон или нет;
- Может обнаруживаться, правильно ли было заблокировано зажимное устройство или служащий для приведения в действие зажимных органов элемент;
- Посредством контроля определенных параметров можно повышать производительность;
- Опасность повреждения зажимного патрона уменьшается;
- Могут обнаруживаться изменения зажимного патрона во времени;
- Зажимной патрон можно простым образом интегрировать в автоматизированную производственную линию; и
- Все датчики расположены на зажимном патроне, так что паллеты могут изготавливаться сравнительно просто и экономично. Вследствие этого паллеты взаимозаменяемы, то есть уже имеющиеся или более старые паллеты - держатели деталей - могут применяться вместе с выполненным согласно изобретению зажимным патроном.
Изобретение относится к машиностроению и может быть использовано для зажатия снабженных зажимной цапфой паллет. Зажимной патрон выполнен с приемным отверстием для зажимной цапфы и содержит зажимное устройство для зажатия зажимной цапфы в приемном отверстии. На зажимном патроне расположен по меньшей мере один датчик для регистрации по меньшей мере одного параметра зажимного патрона и/или взаимодействия между паллетой и зажимным патроном и/или паллеты. Зажимной патрон снабжен передатчиком для беспроводной передачи определенных датчиками параметров. Первый датчик определяет действующее на зажимную цапфу зажимное усилие и расположен на зажимном патроне таким образом, что при зажатии паллеты могут быть измерены упругие деформации в материале зажимного патрона. Обеспечивается контроль зажатия и/или прилегания, и/или освобождения паллеты и точная передача данных о зажатии. 11 з.п. ф-лы, 7 ил.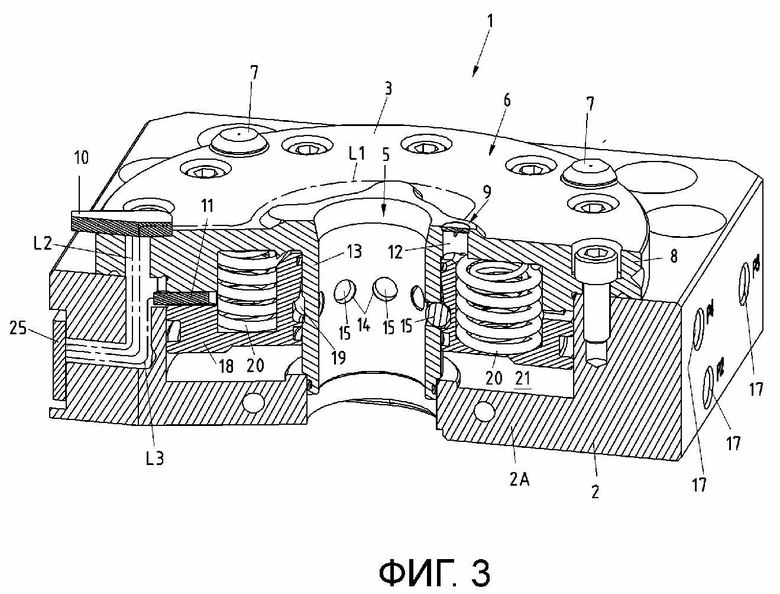
1. Зажимной патрон (1) для зажатия снабженных зажимной цапфой (31) паллет (30), причем зажимной патрон (1) выполнен с приемным отверстием (5) для зажимной цапфы (31) и имеющим зажимные органы (15) зажимным устройством для зажатия зажимной цапфы (31) в приемном отверстии (5), и причем на зажимном патроне (1) расположен по меньшей мере один датчик (9, 10, 11), выполненный с возможностью регистрации по меньшей мере одного параметра зажимного патрона (1) и/или взаимодействия между паллетой (30) и зажимным патроном (1) и/или паллеты (30),
отличающийся тем, что
зажимной патрон (1) снабжен передатчиком (25) для беспроводной передачи определенных упомянутым по меньшей мере одним датчиком (9, 10, 11) параметров,
причем расположенный на зажимном патроне (1) первый датчик (9) предназначен для определения действующего на зажимную цапфу (31) зажимного усилия и расположен на зажимном патроне (1) таким образом, что при зажатии паллеты (30) могут измеряться упругие деформации в материале зажимного патрона (1).
2. Зажимной патрон по п.1, отличающийся тем, что расположенный на зажимном патроне (1) второй датчик (10) предназначен для обнаружения прилегания паллеты (30) к зажимному патрону (1).
3. Зажимной патрон по п.2, отличающийся тем, что второй датчик (10) расположен на верхней стороне (6) зажимного патрона (1).
4. Зажимной патрон по любому из пп.1-3, отличающийся тем, что расположенный на зажимном патроне (1) третий датчик (11) предназначен для обнаружения положения служащего для приведения в действие зажимных органов (15) элемента.
5. Зажимной патрон по п.4, отличающийся тем, что зажимное устройство снабжено перемещаемым между исходным положением и положением блокировки исполнительным поршнем (18) для приведения в действие зажимных органов (15), и причем исполнительный поршень (18) сдвигает зажимные органы (15) в положении блокировки радиально вовнутрь, так что они прикладываются с силовым замыканием к зажимной цапфе (31), причем третий датчик (11) расположен внутри зажимного патрона (1) таким образом, что может обнаруживаться положение находящегося в исходном положении исполнительного поршня (18).
6. Зажимной патрон по п.1, отличающийся тем, что первый датчик (9) является датчиком на основе тензорезисторов (DMS).
7. Зажимной патрон по п.6, отличающийся тем, что первый датчик (9) установлен таким образом, что его сигнал по существу пропорционален зажимному усилию.
8. Зажимной патрон по любому из пп.1, 6 или 7, отличающийся тем, что он снабжен Z-опорами (7) для паллеты (30), которые расположены на верхней стороне зажимного патрона радиально за пределами приемного отверстия (5), причем первый датчик (9) расположен в радиальном направлении между пересекающей Z-опоры (7) линией (L) окружности и приемным отверстием (5).
9. Зажимной патрон по любому из пп.1-8, отличающийся тем, что зажимной патрон (1) снабжен полым, цилиндрическим выступом (13), который ограничивает в радиальном направлении приемное отверстие (5), причем выступ (13) снабжен радиальными отверстиями (14), в которых зажимные органы (15) удерживаются в Z-направлении с геометрическим и/или силовым замыканием.
10. Зажимной патрон по любому из пп.1-9, отличающийся тем, что перемещаемый между исходным положением и положением блокировки исполнительный поршень (18) для приведения в действие зажимных органов (15) выполнен с возможностью перемещения посредством нажимных пружин (20) в положение блокировки и пневматически против усилия пружин (20) в исходное положение, причем в положении блокировки зажимные органы (15) сдвинуты радиально вовнутрь, так что они с силовым замыканием прилегают к зажимной цапфе (31).
11. Зажимной патрон по любому из пп.1-10, отличающийся тем, что в зажимной патрон интегрировано микропроцессорное устройство управления, при помощи которого определенные датчиками (9, 10, 11) данные перед передачей на передатчик (25) анализируются и/или подготавливаются.
12. Зажимной патрон по любому из пп.1-11, отличающийся тем, что зажимной патрон выполнен с возможностью электропитания от батарей или аккумуляторов.
| EP 2052808 B1, 10.03.2010 | |||
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ СИСТЕМОЙ ПРИ ВЫПОЛНЕНИИ ПЕРЕЛЁТА НА ВЫСОКОЭНЕРГЕТИЧЕСКУЮ ОРБИТУ | 2020 |
|
RU2759372C1 |
| WO 2014004167 A1, 03.01.2014 | |||
| ДАТЧИК ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2442964C1 |
| Зажимное устройство | 1988 |
|
SU1505724A1 |
| FR 2944722 B1, 10.10.2014. | |||

