Предлагаемый способ управления может быть использован в космической технике при сближении и стыковке космического объекта (КО), например пилотируемого корабля (ПК), с разгонным блоком (РБ), выводимым на околоземную орбиту, для выполнения маневров перелета на высокоэнергетические орбиты, например при отлете к Луне.
Известен способ управления движением активного КО при сближении с пассивным КО, например орбитальной станцией (ОС) [1. Муртазин Р.Ф. Способ управления движением космическим объектом при сближении с другим космическим объектом. Патент RU № 2657704 от 14.06.2018], выбранный в качестве аналога, который обеспечивает сближение и стыковку за два витка. Такой способ включает выведение активного КО на орбиту, плоскость которой пересекает орбитальную плоскость пассивного КО под углом 9, но с заданным рассогласованием по аргументу широты ΔФ. После чего в окрестности точки пересечения орбитальных плоскостей обоих КО выполняют импульс сближения, характеристики которого определяют по номинальным параметрам орбиты выведения, ликвидирующий рассогласование плоскостей. Затем с использованием бортовых измерений относительного положения обоих КО проводят расчет двухимпульсного маневра для перехода активного КО в окрестность пассивного КО, где сближение завершается автоматической стыковкой. Срочное выполнение первого импульса сближения, определенного по предстартовым расчетам, позволяет сократить длительность сближения до двух витков.
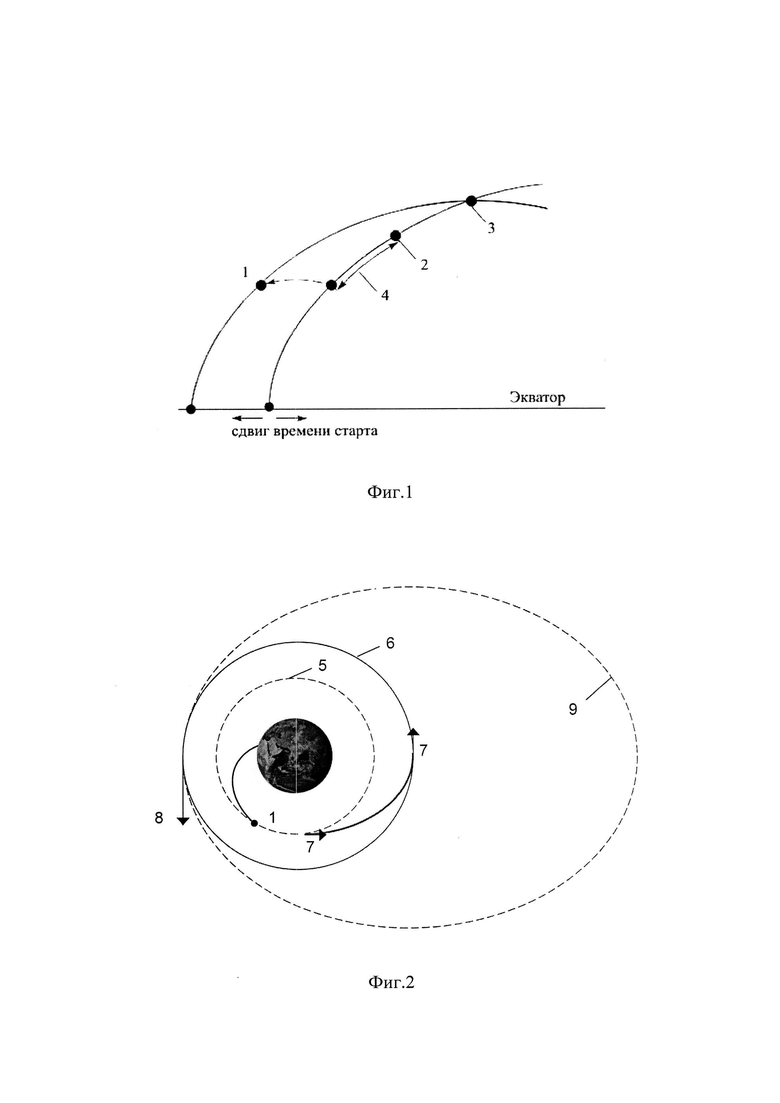
На фиг. 1 приведена схема выведения, используемая в аналоге, где: 1 - активный КО, 2 - пассивный КО, 3 - точка пересечения двух плоскостей под углом 9, где должен быть выполнен импульс, ликвидирующий рассогласование плоскостей, 4 - заданное рассогласование по аргументу широты ΔФ между объектами в момент выведения активного КА в плоскость орбиты КО.
Недостатком этого способа является то, что после стыковки энергетические возможности орбитальной станции (ОС) не позволяют осуществить переход связки на высокоэнергетическую орбиту.
Известен способ управления американским ПК «Джемии-11» при его сближении и стыковке с космическим аппаратом (КА)-мишенью «Аджена», выполнявшим также роль РБ [2. Мировая пилотируемая космонавтика. История. Техника. Люди - под ред. Ю.М. Батурина, М, РТ Софт, 2005], выбранный в качестве прототипа, включающий выведение КО на околоземную орбиту, сближение и стыковку с РБ, автономно выводимым на околоземную орбиту, и приложение к образовавшейся связке перелетного импульса ΔVПРЛ с помощью РБ для перехода на высокоэнергетическую орбиту. Выведение ПК «Джемини-11» осуществлялось в орбитальную плоскость запущенного в те же сутки КА. Сближение было выполнено за один виток с использованием бортовых измерений относительного положения ПК и КА для определения характеристик импульсов сближения. После стыковки с помощью двигателей КА «Аджена», выполнявшего уже роль РБ, к связке был приложен импульс 280 м/с, обеспечивший ее переход на высокоэнергетическую орбиту с высотой апогея орбиты 1370 км.
На фиг. 2 приведена схема полета прототипа ПК «Джемини-11», являющегося КО, с КА «Аджена», являющимся РБ, где: 5 - опорная орбита выведения КО, 6 - орбита РБ, являющаяся целевой орбитой для стыковки, 7 - импульсы перехода КО на орбиту РБ, 8 - отлетный импульс перехода на высокоэнергетическую орбиту ΔVПРЛ, 9 - высокоэнергетическая орбита. После выведения КО 1 на опорную орбиту 5 к нему были приложены импульсы 7 для перехода на целевую орбиту 6, где выполнялась стыковка КО 5 с РБ 2. После стыковки за счет энергетических характеристик РБ к связке из КО и РБ был приложен отлетный импульс ΔVПРЛ 8 для перехода на высокоэнергетическую орбиту 9.
Недостатком этого способа является малая надежность двухпусковой схемы, т.к. в случае не запуска второго КА в срок потребуется досрочное прекращение полета первого КА ввиду ограничений на ресурс автономного полета.
Техническим результатом изобретения является повышение надежности транспортной системы, обеспечивающей отлет КО по двухпусковой схеме при использовании ОС.
Технический результат достигается благодаря тому, что в способе управления транспортной системой при выполнении перелета на высокоэнергетическую орбиту, включающем выведение КО на околоземную орбиту, сближение и стыковку с РБ, автономно выводимым на околоземную орбиту, и приложение к образовавшейся связке перелетного импульса ΔVПРЛ с помощью РБ для перехода на высокоэнергетическую орбиту, в отличие от известного, КО предварительно стыкуют с ОС, а РБ выводят на опорную орбиту, пересекающую плоскость орбиты станции под углом θ, но с заданным рассогласованием по аргументу широты ΔФ, после чего к РБ прикладывают импульсы ΔVi, где i-1,2,…, характеристики которых определяют по номинальным параметрам опорной орбиты выведения РБ, для перехода на целевую орбиту, компланарную и коэллиптическую по отношению к орбите станции с разницей по высоте на величину ΔН, которую определяют с учетом фактического значения ΔФ, а затем отстыковывают космический объект от станции, для сближения с РБ на целевой орбите прикладывают к КО импульсы ΔVj, где j-1,2,…, характеристики которых определяют по фактическим параметрам целевой орбиты, стыкуют КО с РБ и прикладывают к образовавшейся связке перелетный импульс ΔVПРЛ для перехода на высокоэнергетическую орбиту с помощью РБ.
Двухпусковые схемы более экономичны за счет возможности использования ракет-носителей меньшей грузоподъемности. Возможность для ПК ожидания в составе ОС успешного старта РБ позволяет сохранить ресурс для автономного полета. Представленный способ обеспечивает проведение быстрого сближения и стыковки ПК с РБ, имеющим ограниченный срок функционирования, с последующим выполнением при оптимальных условиях отлета ПК на высокоэнергетическую орбиту.
Технический результат в предлагаемом способе управления достигается за счет того, что с помощью квазикомпланарного выведения РБ и сближения с ПК, предварительно состыкованным с ОС, на орбите, коэллиптической к орбите ОС с разницей по высоте ΔН, обеспечиваются совместные условия для быстрого сближения ПК и РБ и для оптимального отлета к Луне.
Сущность изобретения поясняется на фиг. 1÷6, где:
на фиг. 1 представлена схема выведения аналога на опорную орбиту при сдвиге времени старта, обеспечивающая рассогласование плоскостей орбит на угол θ,
на фиг. 2 представлена схема полета прототипа при выполнении перехода на высокоэнергетическую орбиту,
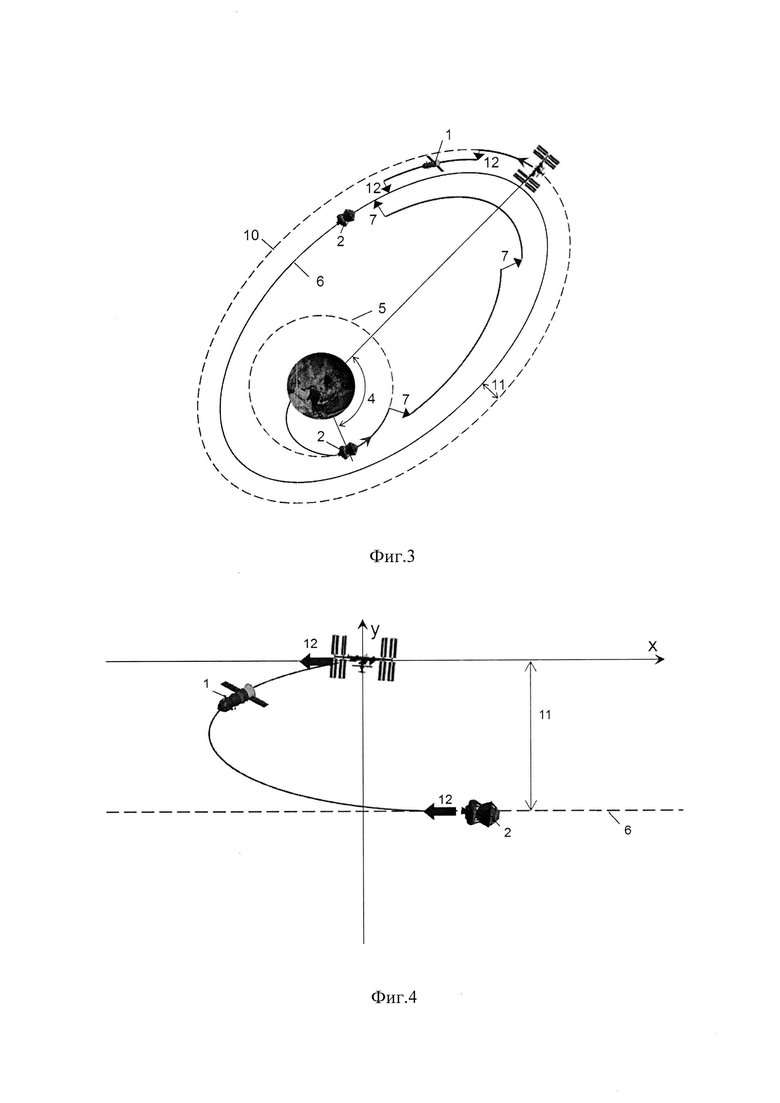
на фиг. 3 представлена схема перехода РБ с опорной орбиты выведения и КО с орбиты ОС на целевую орбиту, коэллиптическую орбите ОС с разницей по высоте ΔН,
на фиг. 4 представлена двухимпульсная схема перелета КО с орбиты ОС на целевую коэллиптическую орбиту с разницей по высоте ΔН для стыковки с РБ,
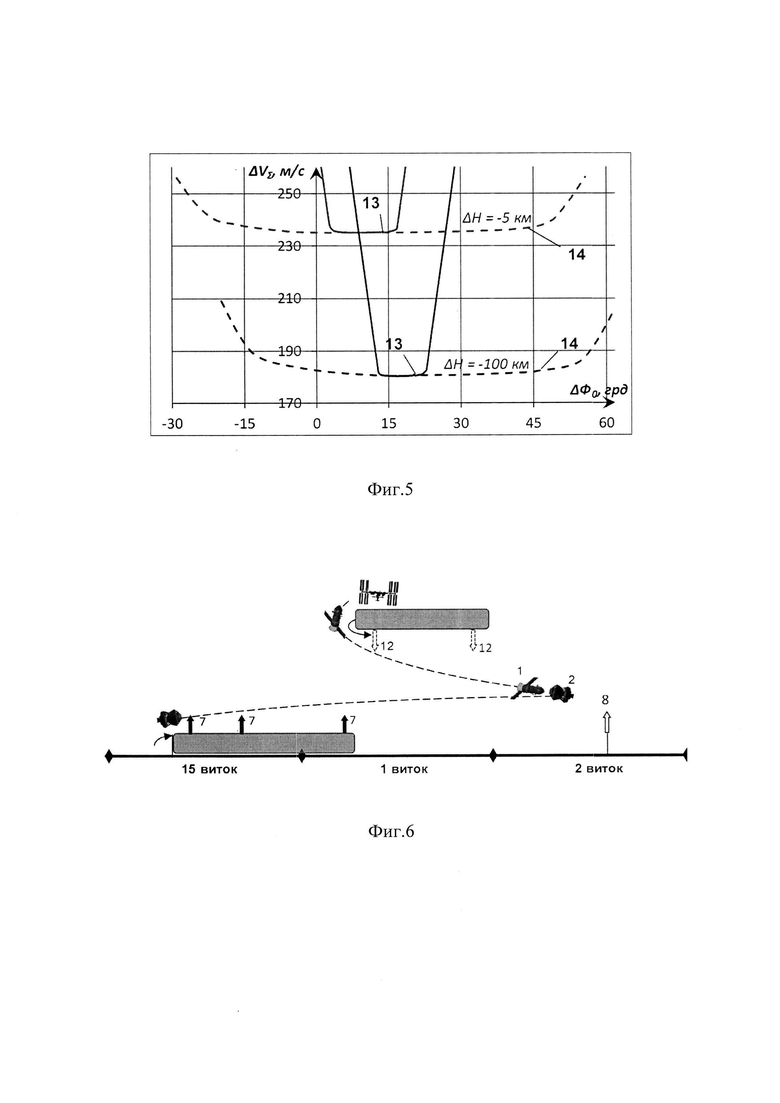
на фиг. 5 представлены графики затрат характеристической скорости РБ на сближение с КО в зависимости от начального рассогласования по аргументу широты ΔФ между объектами при различных значениях разницы по высоте ΔН между целевой коэллиптической орбитой и орбитой ОС,
на фиг. 6 показана циклограмма предлагаемого способа управления транспортной системой при выполнении перелета на высокоэнергетическую орбиту.
На этих фигурах отмечены следующие позиции:
1 - активный КО, 2 - пассивный КО, 3 - точка пересечения двух плоскостей под углом θ, где должен быть выполнен импульс, ликвидирующий рассогласование плоскостей, 4 - заданное рассогласование по аргументу широты ΔФ между объектами в момент выведения активного КА в плоскость орбиты КО, 5 - опорная орбита выведения КО, 6 - орбита РБ, являющаяся целевой орбитой для стыковки, 7 - импульсы перехода КО на орбиту РБ, 8 - отлетный импульс перехода на высокоэнергетическую орбиту ΔVПРЛ, 9 - высокоэнергетическая орбита, 10 - орбита ОС, 11 - разница по высоте АН между целевой коэллиптической орбитой и орбитой ОС, 12 -импульсы для перехода КО с орбиты ОС на целевую орбиту, 13 - диапазон допустимых значений рассогласования по аргументу широты ΔФ, позволяющий провести сближение в компланарной постановке, 14 - диапазон допустимых значений рассогласования по аргументу широты ΔФ, позволяющий провести сближение в квазикомпланарной постановке.
Предлагаемый способ рассмотрим на примере ПК, который должен быть переведен на отлетную траекторию к Луне. Предварительно ПК выводят на орбиту и стыкуют с ОС, в составе которой экипаж ожидает успешного запуска РБ на дату появления баллистических условий для отлета к Луне. После запуска РБ переходит на орбиту, коэллиптическую орбите ОС, а ПК расстыкуется с ОС и также переходит на коэллиптическую орбиту, где стыкуется с РБ. После стыковки к связке с помощью РБ прикладывается перелетный импульс ΔVПРЛ для отлета к Луне.
Успешный запуск РБ еще не обеспечивает благоприятных условий для реализации быстрого сближения РБ и ПК, находящегося в это время на ОС. Так, например, рассогласование по аргументу широты ΔФ при сближении за два витка должно находиться в узком оптимальном диапазоне в 15° [3.Р. Муртазин «Двухвитковая схема сближения космического корабля «Союз» с международной космической станцией», ж. Космонавтика и Ракетостроение ЦНИИМаш, 2017 (1) № 94, с. 30-37], а фактическое рассогласование в оптимальную дату для перелета к Луне может быть в диапазоне от 0 до 360°.
Для расширения условий проведения сближения используют квазикомпланарное выведение, описанное в [1]. При этом время запуска РБ смещают таким образом, чтобы рассогласование с ПК по аргументу широты ΔФ оказалось в оптимальном диапазоне, а возникающий при этом угол рассогласования орбитальных плоскостей ПК и РБ θ частично ликвидируют за счет изменения азимута выведения ракеты-носителя (РН). После выведения на опорную орбиту к РБ прикладывают импульсы перехода на целевую орбиту, характеристики которых определены по предстартовым расчетам без проведения измерений параметров фактической орбиты. Дополнительное расширение допустимых фазовых условий по ΔФ можно получить варьированием разницей по высоте АН между орбитой ОС и коэллиптической орбитой. Переход ПК на коэллиптическую орбиту выполняют за полвитка после отстыковки от ОС путем приложения двух импульсов, характеристики которых определяются по фактическим параметрам орбиты РБ, и проводят стыковку ПК и РБ. После стыковки выполняют отлетный импульс ΔVПРЛ к Луне в момент, когда упреждающий угол между плоскостью орбиты отлета и направлением Земля-Луна составляет 33-60°, что обеспечивает перелет к Луне за 2.5 - 4.5 дня [4. «Основы теории полета КА» под ред. Г.С. Нариманова, М, Машиностроение, 1972].
На фиг. 3 представлена схема сближения и стыковки на целевой орбите. РБ 2 выводят на опорную орбиту 5 с заданным рассогласованием по аргументу широты ΔФ 4 относительно ОС. Затем к РБ прикладывают импульсы 7, характеристики которых определены по предстартовым расчетам, для перехода на целевую орбиту 6, коэллиптическую к орбите ОС 10 с разницей по высоте ΔН 11. Затем КО 1 отстыковывают от ОС и прикладывают к нему импульсы 12, характеристики которых определены по фактическим параметрам целевой орбиты 6, для стыковки с РБ.
На фиг. 4 в орбитальной системе координат (ОСК), связанной с ОС, подробно представлена двухимпульсная схема перелета КО с орбиты ОС на целевую орбиту. После отстыковки КО 1 от ОС к нему прикладывают импульсы 12, характеристики которых определены по фактическим параметрам целевой орбиты 6, которая номинально в ОСК должна представлять горизонтальную прямую вдоль оси X ОСК с разницей по высоте ΔН 11.
На графиках затрат характеристической скорости РБ при сближении с КО (фиг. 5) сплошными линиями 13 обозначены затраты, соответствующие выведению РБ в плоскость орбиты ОС. При этом отсутствует рассогласование плоскостей 3, показанное на фиг. 1. Допустимый диапазон начального рассогласования по аргументу широты ΔФ между РБ и ОС, соответствующий горизонтальной «полке», достаточно узкий и не превышает 15°. За счет квазикомпланарного выведения расширенный диапазон 14 составляет уже 70°. Варьируя разницей высот орбит ОС и целевой коэллиптической орбиты ΔН в диапазоне 5÷100 км удается расширить его до 80°, что с высокой вероятностью обеспечит совместные условия для быстрого сближения и отлета на заданную высокоэнергетическую орбиту, например к Луне.
После выведения РБ 2 на опорную орбиту (фиг. 6) его тремя импульсами 7 переводят на целевую коэллиптическую орбиту, после чего КО 1 отстыковывают от ОС, с помощью двух импульсов 12 переводят на целевую орбиту и стыкуют с РБ. После стыковки за счет энергетики РБ выполняют отлетный импульс 8 для перехода связки на высокоэнергетическую орбиту.
Рассмотрим пример. Допустим необходимо вывести КО на лунную орбиту. Для отлета к Луне потребуется отлетный импульс VОТЛ около 3150 м/с [4]. Как правило, энергетических возможностей КО для выполнения такого большого импульса недостаточно, и для этого используют РБ. Простым решением этой задачи является совместный запуск КО и РБ. Но однопусковая схема потребует использования сверхтяжелой РН. Использование двухпусковой схемы с раздельным стартом КО и РБ позволяет существенно снизить требование к тяговооруженности РН. Для перелета на высокоэнергетические орбиты наиболее эффективно использовать РБ, заправленные низкокипящими компонентами, например, парой кислород-водород. В качестве недостатков нужно отметить, что промежуток времени между запуском РБ и выполнением отлетного импульса VОТЛ небольшой и составляет несколько часов. Момент приложения отлетного импульса выбирается из условия перелета на заданную лунную орбиту. Наиболее просто это условие обеспечивается при старте с Земли выведением КО и РБ на орбиту, плоскость которой удовлетворяет условию отлета к Луне. Учитывая функциональную ограниченность РБ по времени, очевидно, первым должен выводиться КО. Недостатком этого является низкая надежность схемы, т.к. в случае не запуска РБ в срок уже КО вынужден будет досрочно прекратить полет. Использование ОС, на которой КО сможет дождаться запуска РБ, позволяет повысить надежность. В этом случае проблемой становится необходимость совмещения условий для быстрого сближения КО и РБ и для отлета к Луне. Последнее условие повторяется раз в 9-11 дней [5. Р. Муртазин «Транспортная космическая система для обеспечения эксплуатации окололунной орбитальной структуры», ж. Космонавтика и Ракетостроение ЦНИИМаш, 2017 (2) № 95 с. 55-63] поэтому нужно стремиться, чтобы в случае не запуска в РБ срок в следующее окно старта к Луне выполнялись условия для быстрого сближения РБ и КО, ожидающего старта РБ на ОС. Для этого надо стремиться к увеличению допустимого фазового диапазона для проведения быстрого сближения. Для этого используется квазикомпланарное выведение и варьирование высотой ΔН целевой коэллиптической орбиты.
Пусть в плановую дату начальный фазовый угол составлял -15°, что соответствует левой границе расширенного диапазона 14 при разнице по высоте ΔН=5 км. Если орбита ОС является кратной орбитой, то через кратное число дней фазовые условия для сближения повторяются [4]. На орбите пятисуточной кратности каждые сутки фазовые условия смещаются на ~70°. Таким образом, через 10 плюс 1 день, т.е. к моменту появления очередного окна для отлета к Луне условия для быстрого сближения соответствуют уже правой границе расширенного фазового диапазона 14 при разнице в высоте ΔН=100 км.
Представленный пример выполнения предложенного способа показывает возможность реализации двухпусковой схемы для отлета к Луне с одновременным обеспечением условий для быстрого сближения КО и РБ.
Предлагаемый способ может быть использован при доставке пилотируемого КК на полярную окололунную орбиту.
Изобретение относится к выведению космических объектов (КО) с помощью разгонных блоков (РБ) на высокоэнергетические орбиты (например, к Луне) в несколько этапов по двухпусковой схеме. Способ включает выведение КО на околоземную орбиту и стыковку с околоземной станцией (ОС). РБ отдельно от КО выводят на околоземную опорную орбиту, а затем – на компланарную коэллиптическую по отношению к ОС орбиту с разницей по высоте ΔН, на которой выполняется быстрое сближение КО и РБ с последующей их стыковкой. К связке КО и РБ с помощью последнего прикладывают импульс для перехода на высокоэнергетическую орбиту. В случае срыва запуска РБ у КО появляется возможность ожидания в составе ОС следующего стартового окна (например, для отлета к Луне). Техническим результатом является повышение надежности транспортной системы до уровня, характерного для однопусковой схемы, за счет использования ОС. 6 ил.
Способ управления транспортной системой при выполнении перелета на высокоэнергетическую орбиту, включающий выведение космического объекта на околоземную орбиту, сближение и стыковку с разгонным блоком, автономно выводимым на околоземную орбиту, и приложение к образовавшейся связке перелетного импульса ΔVПРЛ с помощью разгонного блока для перехода на высокоэнергетическую орбиту, отличающийся тем, что космический объект предварительно стыкуют с околоземной станцией, а разгонный блок выводят на опорную орбиту, пересекающую плоскость орбиты станции под углом θ, и с заданным рассогласованием по аргументу широты ΔФ, после чего к разгонному блоку прикладывают импульсы ΔVi, где i=1,2,…, характеристики которых определяют по номинальным параметрам опорной орбиты выведения разгонного блока, для перехода на целевую орбиту, компланарную и коэллиптическую по отношению к орбите станции с разницей по высоте на величину ΔН, которую определяют с учетом фактического значения ΔФ, а затем отстыковывают космический объект от станции, для сближения с разгонным блоком на целевой орбите прикладывают к космическому объекту импульсы ΔVj, где j=1,2,…, характеристики которых определяют по фактическим параметрам целевой орбиты, стыкуют космический объект с разгонным блоком и прикладывают к образовавшейся связке перелетный импульс ΔVПРЛ для перехода на высокоэнергетическую орбиту с помощью разгонного блока.
| СРАВНЕНИЕ СХЕМ ПОЛЁТА НА ЛУНУ: США, РФ, СССР - newcomerstudio 2018-02-20 | |||
| Приспособление для нагрева трубок Перкинса в хлебопекарных печах | 1927 |
|
SU14551A1 |
| Мировая пилотируемая космонавтика | |||
| История | |||
| Техника | |||
| Люди | |||
| Под ред | |||
| Ю.М | |||
| Батурина | |||
| М.: "РТСофт", 2005, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СТЫКУЕМЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2562902C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
| US 6669148 B2, 30.12.2003. | |||

