УРОВЕНЬ ТЕХНИКИ
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[01] Настоящее изобретение относится к системе и способу сейсмической разведки с использованием буксируемых кос.
ПРЕДШЕСТВУЮЩИЙ И РОДСТВЕННЫЙ УРОВЕНЬ ТЕХНИКИ
[02] При морской сейсмической разведке одно или несколько надводных судов буксируют группу источников и группу приемников, содержащую несколько буксируемых кос, ниже поверхности моря. Сейсмические источники излучают мощные акустические импульсы, создают взрывы, которые проникают в подземную формацию. Границы между материалами с различными упругими свойствами отражают и преломляют волны и на сейсмических приемниках в группе приемников регистрируют эхо-сигналы для последующего геофизического анализа. Сейсмические волны содержат P-волны и S-волны, но S-волны не распространяются в текучих средах, поэтому при морской сейсмической разведке регистрируют только P-волны.
[03] Исходя из характера работы регистрация сейсмических данных должна охватывать большой участок в единицу времени и в частности, должна уменьшаться или исключаться необходимость в затратном пополнении данных. Применительно к геофизике конечная цель разведки заключается в получении граничных условий для сейсмических уравнений, в частности, путем излучения последовательности импульсов и взятия выборок волнового поля P-волн в дискретные моменты времени и в отдельных точках пространства. При повышенном временном и пространственном разрешении выборок улучшается качество геофизической модели. Общий технологический прогресс привел к повышению частоты взрывов до одного взрыва каждые 5 с и уменьшению размеров бинов от 25 до 6,25 м2. Аналогично этому количество буксируемых кос в группе возросло от нескольких до 12-18, протяженность современной буксируемой косы увеличилась до 10 или 20 км, а типичный разнос вдоль линий приема между приемниками составляет 12,5 м, и поэтому в настоящее время в группе имеются 10-30000 сейсмических приемников.
[04] Таким образом, имеется необходимость в робастной системе определения положения, способной обеспечивать точные геодезические положения источников и приемников. В частности, бином размером 6,25 м2 задаются 12,5 м в качестве верхнего предела положения источника относительно приемника, поэтому система должна обеспечивать получение по меньшей мере 30000 геодезических положений в пределах нескольких метров через каждые 5 с или чаще.
[05] В патенте US 4868793 A (Dunbar; Atlantic Richfield) раскрыты система и способ, в которых несколько разнесенных в поперечном направлении подгрупп возбуждают одновременно и образуют один сейсмический источник. Несколько таких источников возбуждают последовательно по циклической схеме. При одновременном возбуждении нескольких подгрупп высвобождается больше акустической энергии на каждый взрыв, чем при возбуждении одной подгруппы. При возросшей энергии повышается отношение сигнала к шуму (ОСШ) для принимаемых волн. Соответственно, минимальное количество подгрупп и количество воздушных пушек на один источник может определяться заданным отношением сигнала к шуму. Период циклической схемы должен быть больше, чем максимальное время зарядки, необходимое для зарядки подгруппы, чтобы каждую подгруппу можно было возбуждать в течение каждого цикла. Поэтому группа источников может быть разделена на n источников, период Т может быть разделен на T/n интервалов, а источник может быть возбужден в конце каждого интервала. Например, время Т зарядки 10 с и два источника позволяют получать взрыв с акустической энергией, достаточной для получения приемлемого отношения сигнала к шуму, самое большее через каждые 5 с.
[06] Группа приемников может содержать несколько буксируемых кос, при этом их передние концы обычно отнесены параванами в поперечном направлении от направления буксировки. Кроме того, каждая буксируемая коса несет регуляторы положения, способные прикладывать к буксируемой косе силу в поперечном направлении относительно направления буксировки и/или в вертикальном направлении. Хвостовой буй, также называемый поплавком, может быть прикреплен к заднему концу буксируемой косы. Кроме того, буксируемая коса может содержать датчики положения и другое оборудование, которое будет кратко описано с обращением к фиг. 1 и 2. На всем протяжении последующего описания и в формуле изобретения будут использоваться не имеющие строгого определения термины. Кроме того, будет проведено различие между боковым отклонением буксируемой косы от направления буксировки, которое вызывается морскими течениями, и расположением веером, которое представляет собой конфигурацию буксируемых кос, предназначенную для покрытия съемкой более широкого участка в течение прохода.
[07] В патенте US 4798156 A (Langeland et al.; Geco) раскрыта группа буксируемых кос с переменными расстояниями между передними концами буксируемых кос в группе, см. фиг. 3 в патенте.
[08] В патентном документе AU 661000 B2 (Marschall; Prakla) раскрыт способ регистрации морских сейсмических данных, в котором продольную ось по меньшей мере одной буксируемой косы направляют параллельно линии курса и множество дополнительных буксируемых кос в веерной конфигурации выпускают по каждую сторону линии курса. Тем самым при каждом проходе в течение разведки покрывают более широкий участок.
[09] В патенте US 6691038 B2 (Zajac; Western Geco) раскрыта система отслеживания и установки в определенное положение группы сейсмических буксируемых кос, содержащая буксирующее судно для буксировки группы сейсмических датчиков и группу, содержащую множество сейсмических буксируемых кос. Активное устройство установки в определенное положение буксируемой косы (Active Streamer Positioning Device - ASPD) прикреплено к по меньшей мере одной сейсмической буксируемой косе для установки в определенное положение сейсмической буксируемой косы относительно других сейсмических буксируемых кос в группе. Ведущий контроллер предусмотрен для выдачи команд на установку в определенное положение в каждое ASPD для регулирования вертикального и горизонтального положений первой буксируемой косы относительно второй буксируемой косы в группе с целью поддержания заданной геометрии группы. В системе учитываются факторы окружающей среды. Zajac описывает различные группы приемников, включая группу с буксируемыми косами, находящимися на различных глубинах для повышения разрешения во времени.
[10] В патенте US 7944774 B2 (Monk et al.; Apache Corporation) раскрыт способ определения достаточности охвата сейсмическими данными подземного исследуемого участка и его применение для выбора геометрии группы датчиков. Трассу данных создают для каждого из обнаруженных сигналов. По меньшей мере одну зону Френеля определяют для по меньшей мере некоторых трасс сейсмических данных. Вклад каждой из трасс в каждый один из множества бинов, определенных в заданной картине, вычисляют на основании зоны Френеля, связанной с каждой трассой. На основании вычисленных вкладов определяют максимальное расстояние в поперечном направлении между соответствующими сейсмическими датчиками, которое будет результатом суммы вкладов выше выбранного порога. Буксируемые косы могут быть веерообразными.
[11] В заявке US 20140269168 A (Hillesund et al.; PGS Geophysical) раскрыта система управления для группы буксируемых кос, в которой входные данные с устройств положения вдоль буксируемых кос используются для вычисления новой требуемой ориентации. Новая требуемая ориентация может включать в себя новый заданный угол бокового отклонения буксируемой косы от направления буксировки. Этот «заданный угол бокового отклонения буксируемой косы от направления буксировки» включает в себя «угол расхождения веером». Hillesund также является одним из изобретателей, указанных в некотором количестве патентных публикаций в течение последних нескольких десятилетий, например WO 0020895 A и US 7080607 B2.
[12] В патенте US 8897094 (Eick et al.; Conoco Phillips) раскрыта группа буксируемых кос, в которой расстояния между передними концами соседних буксируемых кос отличаются по меньшей мере на 5% и каждая из самых удаленных от середины буксируемых кос имеет угол расхождения веером по меньшей мере 2,5°.
[13] Общая задача настоящего изобретения заключается в решении или ослаблении значения по меньшей мере одной из проблем, упомянутых выше. Конкретные задачи включают в себя получение точных геодезических положений всех сейсмических источников и приемников в течение интервала каждого взрыва и снабжение графического пользовательского интерфейса (ГПИ) точно определенной или ситуативной конфигурацией буксируемых кос.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[14] Эти и другие задачи решаются системой по пункту 1 формулы изобретения.
[15] В частности, согласно изобретению предложена система определения положения при морской сейсмической разведке, содержащая буксирующее судно, группу источников и группу приемников с несколькими буксируемыми косами. Каждая буксируемая коса содержит по меньшей мере три регулятора положения и датчики положения, при этом несколько сейсмических приемников помещены между каждой парой регуляторов положения. Система содержит: а) динамическую модель, в которой каждая буксируемая коса представлена подобранной B-сплайновой кривой и каждый регулятор положения ассоциирован с постоянной скоростью и постоянным ускорением; и b) фильтр Калмана, использующий динамическую модель и наблюдения с датчиков положения для получения геодезического положения каждого сейсмического приемника с лучшей точностью по сравнению с обеспечиваемой только динамической моделью или только наблюдениями в пределах временного интервала Δt, равного или меньшего, чем минимальное время между взрывами, определяемое группой источников.
[16] В течение любого временного интервала Δt наибольшее количество положений буксируемых кос должно смещаться в соответствии с общим сдвигом, устанавливаемым фильтром Калмана. Это эффективно достигается добавлением большого массива в компьютерную память или аппаратное обеспечение. Отклонения от заданного геодезического положения и/или отклонение от заданной конфигурации буксируемых кос в связанных с судном координатах быстро идентифицируется с помощью алгоритма де Бура, применяемого к B-сплайнам. B-сплайнами гарантируется, что геодезическую точку вне области локальной опоры не потребуется вычислять повторно.
[17] Предпочтительно, чтобы система также содержала локальную опору, ограниченную для самое большее четырех последовательных регуляторов положения. Это соответствует степени 3 полинома или кубическим B-сплайнам. Если буксируемые косы содержат датчики положения между регуляторами положения, локальная опора ограничена для 4 диапазонов значений параметров между узлами, соответствующих 4 датчикам положения. В физической системе фильтр Калмана корректирует не моделированные динамические характеристики автоковариационным методом наименьших квадратов (АКМНК). Поэтому аппроксимация B-сплайном физической буксируемой косы имеет достаточную точность в течение по меньшей мере одного временного интервала Δt, то есть в течение приблизительно 5 с.
[18] Некоторые из датчиков положения могут также обеспечивать наблюдения скорости и/или ускорения. Выходные сигналы с акселерометра на основе микроэлектромеханической системы в локальной системе координат вращения попадают в эту категорию. То же самое справедливо в отношении измерений морских течений с измерителей скорости потока, распределенных по группе приемников. Фильтр Калмана обеспечивает точные оценки скоростей и ускорений в геодезических координатах для всех x=vΔt+kaΔt2/2, используемых в динамической модели. Фильтр Калмана может обеспечивать дополнительные параметры, например скорости морских течений, без быстрой пространственной и временной вариации. Дополнительный параметр обычно означает дополнительную степень свободы в фильтре Калмана и является предметом расчета.
[19] Наблюдения могут быть выражены в геодезических и/или связанных с судном координатах. Наблюдения в геодезических координатах включают в себя измерения GPS. Наблюдения в связанных с судном координатах означают любое измерение, выполняемое относительно буксирующего судна, независимо от способа. Например, включаются положения, получаемые с распределительного кабеля известной длины и буксировочных тросов-кабелей. Также включаются расстояния, обеспечиваемые акустическими преобразователями в группе приемников, и лазерные измерения расстояния между буксирующим судном и отражателем на буе.
[20] В системе, включающей физический источник и группы приемников, необходима система управления с замкнутым контуром для управления физическими компонентами системы. Такая система управления должна быть способна принимать входной вектор с фильтра Калмана и представлять реакцию, равную отрицательному входному вектору. Например, силу, противоположную и равную по величине силе, вне зависимости от системы координат. Система управления с замкнутым контуром как таковая известна из предшествующего уровня техники.
[21] Входной вектор для системы управления может выражать отклонение от требуемого положения в геодезических координатах. Надлежащая реакция заключается в смещении в противоположном направлении. Аналогично этому реакция на отклонение от требуемой конфигурации буксируемых кос, выраженная в связанных с судном координатах, заключается в противоположном смещении во входных координатах. Надлежащая реакция на силу, выраженная в TNB-системе координат (tangent-normal-binormal, TNB - система координат с тангенциальной, нормальной и бинормальной осями), является равной по величине и противоположной по направлению силой, выраженной во входных координатах. При преобразовании в другие координаты и обратно добавляются компьютерные циклы, но результат не изменяется.
[22] Преобразование между любой парой систем координат может выполняться путем одного матричного умножения. Обычный способ заключается в предварительном умножении расширенных матриц в R3 относительно R4, при этом каждая расширенная матрица представляет аффинное преобразование в R2 относительно R3. Это минимизирует время выполнения преобразования и позволяет разработчику эффективно уравновешивать память в зависимости от вычислительной мощности.
[23] Предпочтительный вариант осуществления содержит линейную экстраполяцию геодезических координат в пределах временного интервала Δt. Для этого требуется массив кусочно-линейных постоянных скоростей в дополнение к массиву кусочно-линейных положений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[24] Изобретение будет описано для примера с обращением к сопровождающим чертежам, на которых:
фиг. 1 - иллюстрация системы согласно изобретению; и
фиг. 2 - иллюстрация общей окружающей обстановки при подгонке сплайнов к буксирующим косам.
ПОДРОБНОЕ ОПИСАНИЕ
[25] Чертежи являются схематичными и предназначены для иллюстрации изобретения. Поэтому они выполнены не в масштабе и для ясности опущены многочисленные детали, известные специалисту в данной области техники.
[26] Общая идея изобретения заключается в использовании быстрой и эффективной динамической модели и фильтрации Калмана для улучшения оценок геодезических координат. Заявитель провел различие между абсолютной величиной скорости (скаляром) и (вектором) скорости и заметил, что вектор скорости (абсолютная величина скорости и направление) буксирующего судна, движущегося со скоростью 4-5 узлов (7,412-9,265 км/ч), остается приблизительно постоянным в течение каждого временного интервала Δt<5 с. Если локальный постоянный вектор  скорости известен на каждом геодезическом положении в начале каждого временного интервала Δt, то даже более точные оценки геодезического положения могут быть экстраполированы в течение Δt.
скорости известен на каждом геодезическом положении в начале каждого временного интервала Δt, то даже более точные оценки геодезического положения могут быть экстраполированы в течение Δt.
[27] Обозначения условными знаками на протяжении этого описания и в формуле изобретения соответствуют общепринятым: векторы и матрицы обозначаются жирными латинскими буквами, при этом прописными буквами обозначаются матрицы. Курсивные буквы означают, что R3 и C(s) не являются матрицами. Обозначение буквой со штрихом, например C'(s), используется для производных по пространству и обозначение с точкой, например  , используется для производных по времени. Все скаляры являются вещественными.
, используется для производных по времени. Все скаляры являются вещественными.
[28] На фиг. 1 изображена система 100 для морской сейсмической разведки, содержащая сейсморазведочное судно 110, буксирующее группу 120 источников с несколькими подгруппами 121 и группу 130 приемников с несколькими буксируемыми косами 131. Стрелкой Sq-1 на чертеже показан предшествующий путь следования судна сверху вниз и стрелкой 201 показан участок по обеим сторонам пути Sq-1 следования судна, покрытый при предшествующем проходе. Аналогично этому стрелкой Sq показаны в противоположном направлении текущий путь следования судна и направление буксировки, то есть снизу вверх на чертеже. Стрелкой 202 показана полоса, покрываемая при текущем проходе. В соответствии с обычной практикой имеется небольшое перекрытие 203 между предшествующим и текущим проходами. Предпочтительно, чтобы перекрытие было небольшим для получения по возможности наименьшего времени разведки, но все же достаточно большим для исключения или уменьшения необходимости в пополнении данными.
[29] Заштрихованный участок 204 представляет собой участок с достаточным покрытием, а искривленный участок 205 в пределах предшествующего прохода представляет собой участок с недостаточным покрытием, то есть участок, нуждающийся в пополнении данными. Покрытие участка 205 отсутствует по некоторой точно не установленной причине и некоторые буксируемые косы 131 приходится направлять в сторону от текущего пути Sq следования, чтобы выполнить дополнительный проход на участке 205.
[30] На фиг. 1 каждая буксируемая коса 131 соединена с буксировочным тросом-кабелем 112 в точке 113 буксировки. Кроме того, параваны 114, показанные как отклонители и заслонки, создают боковую силу, прикладываемую к распределительному кабелю 115, соединенному с точками 113 буксировки, для поддержания фиксированных расстояний между передними концами буксируемых кос 131. Обращаясь к введению следует отметить, что поскольку патент '156 (Langeland) относится к свободно используемому техническому решению, фиксированные расстояния необязательно должны быть одинаковыми при условии сохранения параллельной конфигурации буксируемых кос. Однако, если расширение на заднем конце превышает 5%, можно нарушить права на патент '094 (Eick), по крайней мере, в территориальных водах США. Конечно, можно рекомендовать поддерживать расширение заднего конца в пределах 5%. Ирония не предполагается.
[31] Несколько приемников 132 и регуляторов 134 положения расположены на всем протяжении буксируемых кос. Регуляторы 134 положения представляют собой устройства любого вида, способные прилагать боковую силу к буксируемым косам 131 и направлять их, например, чтобы компенсировать влияние боковых течений, а также способные регулировать глубину погружения.
[32] Связанная с судном система x, y, z пространственных прямоугольных координат представлена осями x, y с началом в средней части судна 110, при этом ось y параллельна и направлена противоположно текущему пути следования судна или направлению Sq буксировки, а ось x является горизонтальной и перпендикулярной к оси y. Ось z (непоказанная) обычно перпендикулярна к осям x и y в правой системе прямоугольных координат. Направление оси y на фиг. 1 показывает, что по оси z отсчитывается глубина. В навигационной системе ось y может быть ориентирована в направлении буксировки, то есть в направлении, противоположном, показанному на фиг. 1. Связанные с буксируемыми косами координаты представляются в правой прямоугольной системы координат с тангенциальными (Т), нормальными (N) и бинормальными (В) к буксируемым косам осями, обычно называемой TNB-системой координат. Аналогично оси z ось В на фиг. 1 не показана.
[33] Участок 205 представляют в геодезических координатах, например, на связанной с Землей декартовой сетке (X, Y). Для графического отображения, аналогичного показанному на фиг. 1, необходима только 2-мерная карта участка. В частности, точки между источником 121 и приемником 132 достаточно для показа отражения на графическом виде, аналогичном показанному на фиг. 1. Плотность таких точек может показывать покрытие. Как известно из предшествующего уровня техники, подобным же образом подводные течения на глубине буксировки могут быть отображены в геодезических координатах как поле коротких стрелок, обозначающих скорости морских течений.
[34] Для управления направлением движения физических групп в системе 100 должна быть система управления с замкнутым контуром. В настоящем контексте такая система управления всего лишь изменяет знак входного вектора. Например, надлежащая реакция на «отклонение от заданного положения» в геодезических локальных координатах заключается в смещении в противоположном направлении на величину, представленную во входных координатах. Аналогично этому реакция на вектор входной силы, представленный в произвольных входных координатах, должна быть вектором реакции равного размера и противоположного направления. Система управления как таковая известна из предшествующего уровня техники и нет необходимости пояснять ее дополнительно в этой заявке.
[35] Прямоугольные координаты на фиг. 1 выбраны исходя из удобства и при желании могут быть заменены на полярные, сферические или другие координаты. Однако в соответствии с обычной практикой вычисления следует выполнять в состоятельной системе координат для предотвращения добавления погрешностей округления. Например, преобразование крена α, тангажа β и рыскания γ из поворотных координат в прямоугольные координаты (x, y, z) включает в себя вычисление синусов и косинусов, которое вносит погрешности округления. При условии выполнения вычислений в одной системе, например в (x, y, z), численные погрешности, обусловленные преобразованием из (α, β, γ) в (x, y, z) перед вычислением и другим преобразованием обратно в (α, β, γ), будут незначащими. Аналогичные рассмотрения применимы к представлениям, которые включают в себя конечные разности, например эрмитовы сплайны и якобианы.
[36] Все преобразования между системами на фиг. 1 содержат параллельный перенос и поворот, которые являются примерами аффинных преобразований. Другими важными аффинными преобразованиями являются масштабирование, отражение и проецирование, например с 3-мерного на 2-мерный экран монитора компьютера. Прямоугольные координаты образуют аффинные пространства, а аффинные преобразования по определению сохраняют коллинеарность и соотношения протяженностей. Поэтому вектор положения и его производные по времени, скорость и ускорения в прямоугольных координатах являются инвариантными при аффинных преобразованиях. Кроме того, двумерные и трехмерные В-сплайны представляют собой аффинный инвариант и могут без труда проецироваться на двумерный экран монитора компьютера. Например, аффинное преобразование кривой трехмерного В-сплайна эквивалентно преобразованию ее контрольных точек. После преобразования небольшого количества контрольных точек кривую легко пересчитать в двумерную для отображения. Ниже для сведения приведен краткий анализ аффинных преобразований в матричном представлении.
[37] Любая последовательность аффинных преобразований может быть объединена в одно преобразование в многомерном пространстве. Например, трехмерное аффинное преобразование может быть выражено как:
y(x)=Ax+b, (1)
(1)
где x является вектором в аффинном пространстве определения, например, в координатах (x, y, z) на фиг. 1, y, b являются векторами в аффинной обратной области (целевой области), например (T, N, B) или (X, Y, Z) на фиг. 1, и A является матрицей преобразований, например матрицей 3×3 поворота.
[38] Аффинное преобразование (1) можно перезаписать в расширенной форме для четырехмерного случая:
 ,(2)
,(2)
где aij является вещественным скаляром из строки i и столбца j матрицы А преобразований.
[39] Любую последовательность аффинных расширенных матриц можно умножить, чтобы получить новую матрицу такой же формы. Более того М является обратимой, если и только если А является обратимой, и это выражается как:
 ,(3)
,(3)
где А-1=АТ, если А обозначает любой поворот в RN, N=2, 3,…. Следует отметить, что сходства с 3-мерным разложением поворота, например рыскания, тангажа и крена, и отличия от него, выражаются составной трехмерной матрицей R=Rz, Ry, Rx поворота.
[40] Вернемся к фиг. 1, в соответствии с которым задача заключается в определении геодезического положения каждого источника и приемника в группах 120 и 130 с точностью до нескольких метров. Положение в конце временного интервала Δt можно прогнозировать как x1=x0+vΔt, где x0 является положением в начале интервала и v является постоянным вектором скорости. Если много раз добавлять такие временные шаги, погрешности усечения будут добавляться, а «прогнозная» сумма отклоняться или дрейфовать от истинного положения. Общая идея фильтра Калмана заключается в компенсации этого дрейфа при измерениях, но не чрезмерном, чтобы выходные оценки не изменялись быстро вследствие неопределенных измерений, например измерений GPS. Кроме того, фильтр Калмана включает в себя вычисленные реакции, например силу, прилагаемую регуляторами 134 положения для противодействия боковому отклонению буксируемых кос от направления буксировки.
[41] Простой фильтр Калмана представляет собой рекурсивный алгоритм, в котором каждый временной шаг k включает в себя «этап прогнозирования», по существу содержащий вычисления, и «этап обновления» для сбора «наблюдений» (измерений датчиками) и вычисления выходных оценок по результатам на шаге. Выходные оценки являются взвешенными суммами прогнозов и наблюдений и передаются на следующий временной шаг (k+1).
[42] Вычисления в течение этапа прогнозирования зависят от динамической модели системы. Мы уже имеем скорость, аппроксимированную постоянной скоростью v и в связи с этим следует отметить, что благодаря теореме о среднем использование постоянного ускорения не приводит к потере общности на протяжении временного интервала Δt. Поэтому простая динамическая модель настоящей системы имеет вид x=vΔt+aΔt2/2 с постоянными v и a, применимыми ко всем элементам системы 100. Реальные варианты осуществления могут включать в себя, например, реакцию на силы, отклоняющие буксируемую косу от направления буксировки, действующие по длине буксируемой косы. Однако заранее известно, что любая модель является несовершенной: представленная модель включает в себя погрешности усечения и погрешности округления в приближениях v и a. Лучшая практика заключается в сохранении динамической модели простой и по возможности оставление «не моделированными динамических свойств», рассматриваемых ниже. Если этот подход окажется неуспешным, в динамическую модель можно включить дополнительные признаки, такие как натяжение, кривизна и/или вращающие силы.
[43] В представленном примере только параваны 114, регуляторы 134 положения и управляемые хвостовые буи 133 могут оказывать воздействие. На этапе прогнозирования все другие элементы несколько сдвинуты в соответствии с Δx=vΔt, где v является мгновенной скоростью буксировки в начале временного интервала Δt. Представьте себе, что все положения x датчиков в геодезических координатах сохраняются в памяти компьютера, имеющей большую емкость. Положения должны сохраняться упорядоченными, например, в таблице соответствия, в которой в каждой строке представлена буксируемая коса, а элементом E[r, i] в строке r представлена координата X или Y датчика номер i буксируемой косы номер r. Например, 32 бита (4 байта) по одному измерению (X или Y) обеспечивают пренебрежимо малую погрешность округления при масштабе 1/20000. При использовании численного разрешения, составляющего 32 бита, для 50000 геодезических положений по двум измерениям (X, Y) необходимо иметь около 400 килобайтов памяти. Поэтому несколько строк или все строки в таблице соответствия должны хорошо вписываться в память обычного персонального компьютера. Добавление постоянной vΔt ко всем элементам в массиве, сохраняемом в быстродействующем аппаратном обеспечении (компьютерной памяти), регулируется аппаратным обеспечением в течение нескольких циклов в большей части центральных процессоров или графических процессоров. Поэтому не следует беспокоиться относительно времени выполнения, связанного с 10000-30000 добавлениями в контур, и следует отметить, что при простой параллелизации времена выполнения сокращаются на порядки величины.
[44] Далее, необходима модель буксируемых кос. Буксируемые косы не соединены механически, поэтому в соответствующей динамической модели каждая буксируемая коса должна быть представлена как индивидуальная кривая в пространстве. В-сплайны являются предпочтительными для характеристики их локальной опоры и нескольких других полезных характеристик. По тем же причинам В-сплайны широко используют в других областях техники. В-сплайны ограничивают количество пикселей, которые необходимо вычислять повторно для компьютерного изображения с движущимся передним планом и статическим задним планом.
[45] На фиг. 2 показана общая обстановка. Желательно провести гладкую (С2-непрерывную) B-сплайновую кривую C(s) через последовательность точек Di данных в координатах (x, y, z). В частности, это означает нахождение последовательности контрольных точек Pi на охватывающей ломаной линии. Более того, степень полинома относительно C(s) должна быть по возможности низкой для наилучшей аппроксимации буксируемой косы. Это влечет за собой полиномы со степенью j=3, то есть кубические В-сплайны. Выделение жирным шрифтом символа C(s) означает, что скалярный параметр s образует отдельные кривые x(s), y(s) и z(s), каждая из которых не зависит от степени полинома. После нахождения C(s) положение любого сейсмического приемника 132 может быть найдено путем полиномиальной интерполяции с использованием алгоритма де Бура, в отношении которого известно, что он является быстродействующим и численно стабильным.
[46] Сейсмические приемники 132 являются доступными для приобретения устройствами, используемыми для взятия выборок из волнового поля продольных волн, и обычно содержат гидрофоны и/или другие сейсмические датчики. Любой подходящий сейсмический приемник 132 может быть включен в буксируемую косу 131. Для последующей ссылки следует отметить, что натяжение буксируемой косы длиной 10-20 км может приводить к значительной деформации. Однако в течение разведки расстояние между двумя соседними сейсмическими приемниками 132 должно оставаться приблизительно постоянным. Двумя расстояниями ck и ck+1 на буксируемой косе 131b показано, что расстояния между соседними элементами являются приблизительно постоянными, но необязательно равными. Каждое расстояние ck вдоль линий приема известно заранее, например измеряется во время выпуска.
[47] Кроме того, в буксируемую косу включены регуляторы 134 положения и датчики 135-137 положения. Регулятор 134 положения может включать в себя датчик положения, например акустический преобразователь 137 для определения расстояний до соседних акустических преобразователей 137. Пунктирными линиями между буксируемыми косами 131а и 131b на фиг. 2 показаны расстояния между такими акустическими преобразователями, не соединенными механически.
[48] Другие обычные датчики положения, показанные на фиг. 2, включают в себя отражатель 135, установленный над поверхностью моря на хвостовом буе 133, прикрепленном к заднему концу буксируемой косы 131а. Как показано двунаправленной стрелкой, лазерная/интерферометрическая система измерения расстояний, работающая в видимом или инфракрасном диапазоне, определяет расстояние от судна 110 до отражателя 135. Лазерная система измерения расстояний имеет ограниченный диапазон действия, поэтому отражатель 135 может быть установлен на буе вблизи буксирующего судна, в группе с буксируемыми косами длиной несколько километров. Когда отражатель 135 поднимается и опускается и отклоняется назад и наклоняется вперед вследствие действия волн на поверхности моря, измерения расстояния и направления изменяются от одного временного интервала до следующего без соответствующего перемещения конца буксируемой косы 131а. Это является примером «шума наблюдения» и показывает, что фактическая вариация R3 может быть эллипсоидом.
[49] Буксируемая коса 131b соединена с отдельным хвостовым буем или поплавком 133, снабженным антенной 136 GPS, находящейся над поверхностью моря. Соответствующая точка данных имеет другое среднее положение и вариацию, отличающиеся от среднего положения и вариации антенны GPS на судне 110.
[50] Другие обычные и полезные датчики, не показанные на фиг. 2, включают в себя, но без ограничения ими, блок инерциальных измерений (БИИ) с акселерометрами на основе микроэлектромеханической системы, измерители потока для измерения интенсивности и направления подводных течений и датчики напряжения и деформации, устанавливаемые на любом месте, на котором напряжение или деформация является проблемой, например в точках 113 буксировки. Специалист в данной области техники хорошо знаком с этими и другими подходящими датчиками.
[51] Точки Di данных могут быть измерены любым способом. Что касается фиг. 1, то длина буксировочных тросов-кабелей 112, положения параванов 114 и известные длины отрезков распределительного кабеля 115 могут помочь определить точку 113 буксировки буксируемой косы 131.
[52] Только несколько последних точек Dn-2, Dn-1, Dn данных показаны на фиг. 2. D0 является точкой 113 буксировки на переднем конце и последняя точка Dn соответствует заднему концу буксируемой косы. Последовательностью точек Di данных задаются n отрезков кривой, Ci(s)∈[Di-1,Di>; 1≤i≤n. C2-непрерывность означает, что кривая C(s) должна быть непрерывной и должна иметь непрерывные первую и вторую производные C'(s), C"(s) в каждой точке Di данных.
[53] Ниже будут использоваться некоторые общеизвестные свойства и формулы. Общие сведения можно найти в Интернете, например в разделе "B-spline curves: Important propertiesʺ [1], или в Википедии.
[54] Для подбора требуется, чтобы P0=D0 и чтобы Pm=Dn. В случае кубического B-сплайна это означает, что m=n+2. Значение si параметра, которое соответствует соединению в Di, называется узлом, а последовательность узлов в возрастающем порядке называется вектором узлов. В соответствии с обычной практикой вектор узлов нормируют к виду [0, 1] для повышения численной устойчивости в связи с относительно высокой плотностью плавающих чисел в этом интервале. Что касается фиг. 2, то кумулятивная параметризация длины хорды представляется логичной. В рекурсивной форме:
s
0=0;
 ;1≤k≤n;(4)
;1≤k≤n;(4)
где ck является постоянным расстоянием между двумя соседними датчиками 132-137 на буксируемой косе; Ltot является полной длиной буксируемой косы, измеряемой величиной, если деформация является значительной, и n является количеством датчиков 132-137 на буксируемой косе.
[55] Следует отметить, что вектор узлов содержит значения sk для всех датчиков, тогда как для подбора кривой требуется намного меньший вектор узлов с узлами si для датчиков определения местоположения. Векторы узлов, представляющие sk относительно si, для удобства можно сохранять в виде строк в таблице соответствия аналогично тому, как это делается для геодезических положений и как описано выше.
[56] Чтобы прикрепить B-сплайн степени j к контрольным точкам на его конце, то есть гарантировать, что D0=P0 и Dn=Pm=Pn=2, первый и последний j+1 узлы повторяются. Поэтому для кубического B-сплайна, прикрепленного на обоих концах, s0=s1=s2=s3=0 и sn=sn+1=sn+2=sn+3=1 в векторе si-узла.
[57] B-сплайновая кривая имеет форму
 ,s∈[0, 1],(5)
,s∈[0, 1],(5)
где Ni,j(s) являются B-сплайновыми базисными функциями, определяемые рекурсивной формулой Кокса-де Бура:
Ni
,0(s)=1, если si≤s<si+1, и 0 в случае(6а)
 . (6b)
. (6b)
[58] Не предполагается, что все диапазоны значений параметра между узлами являются одинаковыми, поэтому замкнутая форма (6a, 6b) выглядит усложненной. Более важно то, что рекурсивные выражения (6a), (6b) решаются быстрее, чем выражения в замкнутой форме. Благодаря ступенчатой функции в (6а) первый член в Ni,j(s) является ненулевым только в диапазоне i значений параметра между узлами, а второй член является ненулевым только в диапазоне i+1 значений параметра между узлами. При каждой итерации (6b) диапазон значений параметра между узлами добавляется до тех пор, пока 4 диапазона значений параметра между узлами не будут добавлены при j=3. Это является локальной опорой, упомянутой выше.
[59] В случае кубических сплайнов самое большее 3 интервала Ci(s) кривой являются обоснованными на любом узле si, так что критерий подбора имеет вид:
Ni,
3(si)Pi+Ni+1,3(si)Pi+1+Ni+2,3(si)Pi+2= Di.(7)
[60] В данном случае P0=D0 и Pn+2=Dn, так что уравнение (7) дает n-1 независимых уравнений с n+1 неизвестными. Необходимы два дополнительных условия для однозначного решения и приравнивание вторых производных на концах к нулю, то есть C"(0)=0 и C"(1)=0. С учетом моделирования буксируемых кос это представляется логичным.
[61] Для дальнейшего пояснения необходимы выражения для производных по пространству:
 ;
; ;(8)
;(8)
 ;
; ;(9)
;(9)
где вектор узлов для (8) является исходным, при этом одна копия s0 и одна копия sn удалены, и вектор узлов для (9) является исходным, при этом вторые копии s0 и sn удалены.
[62] При подборе кривой кубического сплайна мы имеем s=s0=s1=0, что соответствует P0=D0 в (x, y, z). Аналогично этому равенство Pn+2=Dn соответствует sn=sn+1=sn+2=1. Поэтому в соответствии с простым правилом алгебры первый и последние три члена из (9) дают a1P1+a2P2=D0 и anPn+an+1Pn+1=Dn. Совместно с (7) они дают систему n+1 уравнений с n+1 переменными:
 ,(10)
,(10)
где А является ленточной матрицей с самое большее 3 ненулевыми элементами в каждой строке.
[63] Стандартные способы решения (10) без численно затратной инверсии включают в себя LU-разложение и QR-разложение с прямой подстановкой. В варианте прямой подстановки можно находить решение верхней левой матрицы А 3×3 и вычислять каждую следующую контрольную точку Pi на основании 3 предшествующих контрольных точек и следующей точки Di.
[64] Система (7) соответствует «толстой» матрице, то есть матрице с большим количеством столбцов, чем строк (m>n), при этом вторые производные не должны быть нулевыми. На практике широко используют минимальные нормы для получения недостающих уравнений для системы «толстых» матриц. Например, подбор методом наименьших квадратов (минимальной L2-нормы) является подходящим при многих применениях. В случае B-сплайнов метод минимальных полилиний (минимальной L1-нормы) может быть альтернативой вследствие «сильно выпуклой оболочки» B-сплайнов. В общем случае QR-разложение включает в себя матрицу R1 n×n, дополненную нулями в последних m-n строках. К другому полезному представлению для численных применений относятся «псевдообратные матрицы» A†, которые являются в достаточной степени обратными для выполнения A†A≈I. Точнее, типичную псевдообратную матрицу вычисляют рекурсией, которую прекращают, когда остаток становится меньше некоторого предела, например, заданного допуска в несколько метров, или предела, обусловленного погрешностями усечения или округления. Эти и другие алгоритмы из численной линейной алгебры имеются в литературе по программному обеспечению и здесь нет необходимости дополнительно пояснять их.
[65] Для любого датчика 132-137 sk находят в таблице соответствия, см. уравнение (4). C(sk) и алгоритм де Бура дают положение датчика в связанных с судном координатах (x, y, z).
[66] Далее, необходимы TNB-система координат для регуляторов 134 положения, расходомеры, измеряющие морское течение, и т.д. Оригинальные формулы Френе-Серре относятся к кинематике частиц, движущихся вдоль непрерывной и дифференцируемой параметрической кривой в R3, и задают TNB-систему координат с векторами, тангенциальными, нормальными и бинормальными к параметрической кривой. Они являются обоснованными для любого вещественного скалярного параметра s, а не только для специального случая из уравнения (4). Кроме того, необходимы только немногие общие результаты и обращение к учебным пособиям или статьям из Интернета на протяжении описания.
[67] Принимая во внимание то, что C'(s) является тангенциальной к C(s), TNB-систему координат можно выразить в матричной форме:
 ,(11)
,(11)
 ,(12)
,(12)
 ,(13)
,(13)
где  является евклидовой нормой, и векторное произведение в матричной форме имеет вид
является евклидовой нормой, и векторное произведение в матричной форме имеет вид
 ; a=[ax, ay, az], b=[bx, by, bz].
; a=[ax, ay, az], b=[bx, by, bz]. (14)
(14)
[68] Единичный вектор нормали является неопределенным для «прямой линии» и необходимо отдельное рассмотрение: положим, что Di-1, Di, Di+1 являются углами треугольника. Если высота треугольника больше, чем заданный допуск, вычисление N и B при Di, производится при использовании (12) и (13). В других случаях набор значений N и B равен значениям Di-1. В данном случае максимальная высота треугольника соответствует половине допуска, заданного для положений Di в (x, y, z).
[69] T и N показаны на фиг. 2. В правой системе координат B будет точкой, спускающейся в плоскость чертежа на фиг. 2, и это направление является предпочтительным для применений, связанных с сейсмической разведкой.  эффективно вычисляется с помощью алгоритма де Бура при использовании B-сплайна из уравнения (9). и ее евклидова норма из уравнения (11) повторно используется в уравнении (12). Аналогично этому алгоритм де Бура относительно B-сплайна в уравнении (9) дает
эффективно вычисляется с помощью алгоритма де Бура при использовании B-сплайна из уравнения (9). и ее евклидова норма из уравнения (11) повторно используется в уравнении (12). Аналогично этому алгоритм де Бура относительно B-сплайна в уравнении (9) дает  .
.
[70] Дифференцирование по времени не изменяет направления вектора, поэтому измерения положения, ориентации, скорости и ускорения в TNB-системе координат можно преобразовывать в любые координаты выбора при использовании уравнения (2) и умножения в обратном порядке.
[71] Модель буксируемых кос, описанная до сих пор, может быть улучшена путем подбора B-сплайнов в направлении, перпендикулярном к линии приема, и/или путем задания многоугольной, например треугольной, сетки в пределах акустических преобразователей 137. Методика подбора сплайнов для одномерного и двумерного случаев имеется в готовом программном обеспечении, например в графических библиотеках. Для некоторых двумерных сплайнов, например сплайнов тонких пластин, предполагаются упругие свойства по двум пространственным направлениям, и они не подходят для развязанных буксируемых кос.
[72] Предположим, что основа, изложенная выше, используется для определения требуемой конфигурации буксируемых кос в графическом интерфейсе пользователя и что компьютерная модель обеспечивает перечень требуемых точек di данных. Фильтр Калмана поддерживает аналогичный перечень оцененных точек Di данных. Оба перечня представлены в связанных с судном координатах (x, y, z) и поэтому не зависят от скорости буксировки и связанных с ней временных сдвигов в геодезических координатах. На каждом временном интервале Δt изменение знака Di и добавление к di дает предварительную реакцию. Как и выше, операции могут выполняться по всем «строкам» в компьютерной памяти. Все элементы в группе предварительных реакций, которые слабее, чем заданный постоянный допуск, игнорируются, а остающиеся представляют собой надлежащие реакции для отклонения.
[73] Для каждого такого отклонения уравнением (7) определяются 3 контрольные точки, которые должны быть повторно вычислены для подбора кубического B-сплайна C(s) с помощью отклонения Di. Другие части B-сплайна не подвергаются воздействию благодаря характеристике локальной опоры. Поэтому подбор кривой означает решение системы 3×3 с известными коэффициентами. Кроме того, QR-разложение с прямой подстановкой является эффективным в редких случаях, когда несколько смежных точек данных не находятся в пределах Δt.
[74] После повторного вычисления трех контрольных точек все положения датчиков для 4 подвергнувшихся воздействию диапазонов значений параметра между узлами должны быть пересчитаны при использовании алгоритма де Бура в последовательности от вектора sk-узлов. Результаты преобразуют в геодезические координаты и заменяют элементы в геодезической таблице соответствия. Для небольшого количества этих элементов, например для регуляторов 134 положения и расходомеров, может потребоваться дополнительное вычисление в новой TNB-системе координат.
[75] Графический интерфейс пользователя может иметь удобное «локальное представление» для конфигурации буксируемых кос и т.д. в связанных с судном координатах и «геодезическое представление» для показа «общих средних точек» и полей морских течений в геодезических координатах, описанных выше. B-сплайны представляют собой аффинный инвариант, поэтому для отображения кривой графический процессор, то есть графическое программное обеспечение и графическая карта, должен иметь несколько контрольных точек. Кроме того, в любом таком графическом процессоре объединяются аффинные преобразования и поэтому обеспечивается увеличение любой части группы буксируемых кос и визуальное отображение в реальном времени части или всей группы буксируемых кос в перспективе или под любым углом. Требуемыми входными данными являются всего лишь несколько контрольных точек в связанных с судном координатах. Локальное морское течение может быть отображено как цветной профилированный фон. Для этого в графическом процессоре обычно используют кривые Безье, которые представляют собой B-сплайны без узлов между прикрепленными нулями в начале и конце вектора узлов.
[76] Фильтр Калмана может иметь несколько внешних степеней свободы, например, геодезических и связанных с судном положений, упомянутых выше. Количество внутренних состояний является предметом расчета. Например, ниже используются регулятор 134 положения и добавляются скорость и ускорение в качестве внутренних состояний. При использовании формы записи, упомянутой выше, а не формы записи для производных по времени, можно предположить:
 ;
;  ;
;  ;
;  ;
;  (15)
(15)
где x присутствует в геодезических координатах и B осуществляет преобразование из TNB-системы координат регулятора положения.
[77] Пусть индексы m|n обозначают состояние до n-го включительно. Оценки на этапе прогнозирования предварительного (априорного) состояния на этапе k по выходным (апостериорным) оценкам на этапе (k-1) имеют вид:
 ;
; .(16)
.(16)
[78] Fk является «моделью переходного состояния», которая привносит фильтр из этапа (k-1).
[79] Bk является «моделью управления» и uk «вектором управления», который выражает реакцию, вычисляемую на этапе k, например, на основании оцененного локального течения и свойств регулятора положения. Результирующая сила преобразуется сначала в ka в связанных с судном координатах, затем с помощью ca=B-1ka в релевантную TNB-систему координат. Два преобразования объединяются в одно матричное умножение в соответствии с уравнением (2). Параваны, управляемые хвостовые буи и другое оборудование, которое может прикладывать силу, имеют члены Bu, тогда как сейсмические приемники 132, акустические преобразователи 137 и т.д. лишены члена Bu.
[80] Все P являются «ковариационными матрицами погрешностей прогнозирования», определяемыми рекурсией. Если заранее известно, что они являются небольшими или незначительными, обычное предположение заключается в том, что случайное блуждание приводит к P0|0=Iσ2, где I является единичной матрицей и вариантность σ2 системы некоторым скаляром, например 0,5. Правильно рассчитанный фильтр сходится, поэтому усилие, затрачиваемое на оценивание оптимальных значений, будет ограниченным. Представленный фильтр Калмана выполняет 120 пятисекундных этапов в течение десяти минут.
[81] Q является ковариацией шума wk~N(0, Q) процесса. Шум процесса может содержать не моделированные динамические характеристики и другие систематические ошибки, которые могут приводить к расходимости фильтра и которые трудно отличить от шума наблюдения. Общая практика заключается в вычислении матрицы Q ковариации статистическими методами, например автоковариационным методом наименьших квадратов (АКМНК). В автоковариационном методе наименьших квадратов в основном используются данные из нескольких предшествующих этапов для поиска систематических отклонений. Исчерпывающее описание можно найти в Интернете или в литературе.
[82] Этап обновления касается измерений, взвешенных сумм и выходного состояния. Первая задача заключается в нахождении «остатка наблюдения» на основании настоящего и предшествующего измерений:
 .(17)
.(17)
[83] «Вектор zk наблюдения» для конкретного регулятора положения соответствует точке Di данных на фиг. 2. Однако Di были выражены в (x, y,z), тогда как x и z выражаются в (X, Y). В «модель наблюдения» H просто отбираются предшествующие оценки. Например, в модель H=[1 0 0] отбирается оценка положения, соответствующая Di, для регулятора 134 положения или акустического преобразователя 137. Если регулятор положения также осуществляет измерение скорости, представляющей, например морское течение, H должна иметь дополнительную 1 на месте нахождения скорости, то есть H=[1 1 0]. В альтернативной версии фильтра Калмана измерения с акустических преобразователей 137 могут обрабатываться как четвертая степень свободы и отбираться в модель H=[0 0 0 1].
[84] Кроме того, имеется необходимость в «остаточной ковариации»  , где R является ковариацией шума наблюдения и обычно аппроксимируется автоковариационным методом наименьших квадратов.
, где R является ковариацией шума наблюдения и обычно аппроксимируется автоковариационным методом наименьших квадратов.
[85] «Оптимальное усиление  Калмана» является оптимальным в том смысле, что оно минимизирует разность наименьших квадратов между x и его оценкой
Калмана» является оптимальным в том смысле, что оно минимизирует разность наименьших квадратов между x и его оценкой  . Его элементы являются вещественными скалярами в интервале [0, 1]. Выражения для S и K могут выглядеть сложными, но легко реализуются, поскольку, как описано выше, для H просто отбирается предшествующая переменная.
. Его элементы являются вещественными скалярами в интервале [0, 1]. Выражения для S и K могут выглядеть сложными, но легко реализуются, поскольку, как описано выше, для H просто отбирается предшествующая переменная.
[86] Выходное состояние или апостериорные оценки на этапе k имеют вид
 ;
;  .(18)
.(18)
[87] «Крупные» элементы Kij в усилении Kk Калмана, то есть значения на интервале <0,5; 1], вкладывают дополнительный вес в наблюдения и соответственно снижают вес прогноза. Взвешенные суммы в (18) представляют собой значения, вводимые на следующий этап (k+1).
[88] В реальных вариантах осуществления простые фильтры Калмана являются численно неустойчивыми, если значения в ковариационных матрицах становятся небольшими. Причина заключается в том, что ковариационные матрицы P, Q, R по определению являются положительно определенными, но небольшие элементы могут быть причиной отрицательных погрешностей округления, которые делают матрицы неопределенными. Стандартное решение заключается в представлении P, Q, R в форме квадратного корня, предпочтительно в виде UD-разложений (U - верхняя треугольная матрица, D - диагональная матрица). Эффективные алгоритмы для этапов прогнозирования Калмана и обновления в форме квадратного корня можно найти в Thornton [2] и Bierman (1977) [3].
[89] При добавлении скорости к предшествующему примеру с геодезическими положениями оценки апостериорного положения и скорости из этапа (k-1) можно использовать для экстраполяции положений в течение этапа k. При скорости буксировки 2,6 м/с (5 узлов) эта линейная аппроксимация улучшит геодезические оценки приблизительно на 1,3 м по сравнению с выходными данными о положении из этапа (k-1). При 2-мерной сетке (X, Y) эта дополнительная степень свободы потребует дополнительных 400 килобайтов памяти. Конечно, в реальном варианте осуществления потребность в памяти будет иной.
[90] Во время поворота с пути Sq-1 следования судна на путь Sq следования буксируемые косы отклоняют или разделяют для минимизации расходов по эксплуатации и опасности запутывания. Формы самых левых буксируемых кос на фиг. 1 похожи на формы во время такого отклонения. Фильтр Калмана, обеспечивающий точные оценки положения, уменьшает необходимость в запасах безопасности, обусловленных неопределенными измерениями положения. Если скорость была добавлена как степень свободы к такому фильтру Калмана, можно будет сравнивать точные скорости в поперечном направлении с заданными значениями, оптимизированными для минимизации времени поворота. Добавляемые степени свободы повышают требования к памяти, но добавляемая вычислительная мощность возрастает только в малой степени благодаря характеристике локальной опоры B-сплайнов.
[91] Предполагается, что B-сплайновые кривые достаточно хорошо аппроксимируют физические буксируемые косы. Что касается фиг. 1, то во время правого поворота даже при максимальной поперечной скорости хвостового буя самой левой буксируемой косы маловероятно, что регулятор положения номер 3 будет перемещаться от конца намного дольше, чем в течение Δt~5 с.
[92] Фильтр Калмана сам по себе требует небольшой памяти и вычислительной мощности. Автоковариационным методом наименьших квадратов вычисляется автокорреляция по последовательности предшествующих оценок, но сам метод является затратным. Однако для грубого оценивания в объеме мегабайта на каждую степень свободы и временных задержках в ~1000 этапов требуется гигабайт памяти. Поэтому на недорогом персональном компьютере, работающем с достаточно эффективными операционной и файловой системами, например с операционной системой на диалекте Linux с файловой системой ext4, можно в реальном времени выполнить фильтр Калмана. Альтернативно, упрощенная операционная система реального времени должна удалять холостые циклы. Специализированная файловая система может улучшить отображение из файловой системы в память по сравнению с файловыми системами общего назначения.
[93] Приведенные выше и другие варианты осуществления находятся в объеме настоящего изобретения. Специалист в данной области техники должен осознать эти и другие применения и модификации изобретения, определенные в формуле изобретения.
ЛИТЕРАТУРА
1.http://www.cs.mtu.edu/~shene/COURSES/cs.3621/NOTES/spline/B-spline/bspline-curve-prop.html.
2. Thornton Catherine L.: ʺTriangular Covariance Factorizations for Kalman Filteringʺ (PhD thesis), NASA Technical Memorandum, 33-798, 1976.
3. Bierman G.J.: ʺFactorization Method for Discrete Sequential Estimationʺ, Academic Press, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУППА ИСТОЧНИКОВ ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2017 |
|
RU2739725C2 |
| КОНФИГУРАЦИЯ БУКСИРОВКИ СЕЙСМИЧЕСКИХ ИСТОЧНИКОВ С ШИРОКИМ РАЗНОСОМ | 2018 |
|
RU2747833C1 |
| ПОЛУЧЕНИЕ СЕЙСМИЧЕСКИХ ДАННЫХ В РАЙОНАХ, ПОКРЫТЫХ ЛЬДОМ | 2015 |
|
RU2680259C2 |
| МОРСКИЕ СЕЙСМОРАЗВЕДОЧНЫЕ РАБОТЫ С ИСПОЛЬЗОВАНИЕМ СУДНА ОБЕСПЕЧЕНИЯ | 2015 |
|
RU2673219C2 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| СПОСОБ СЪЕМКИ ГЕОМАГНИТНОГО ПОЛЯ НА АКВАТОРИИ БУКСИРУЕМЫМ МАГНИТОМЕТРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2587111C1 |
| Система для управления морскими сейсмическими исследованиями | 1986 |
|
SU1376052A1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| ОБНАРУЖЕНИЕ УГЛЕВОДОРОДОВ | 2017 |
|
RU2720734C1 |

Изобретение относится к области геофизики и может быть использовано при проведении морских сейсморазведочных работ. Заявлена система (100) определения положения при морской сейсмической разведке, содержащая буксирующее судно (110), группу (120) источников и группу (130) приемников с несколькими буксируемыми косами (131). Каждая буксируемая коса (131) содержит по меньшей мере три регулятора (134) положения и датчики (134-137) положения, при этом несколько сейсмических приемников (132) помещены между каждой парой регуляторов (134) положения. Система (100) содержит динамическую модель, в которой каждая буксируемая коса (131) представлена подобранной B-сплайновой кривой и каждый регулятор (134) положения ассоциирован с постоянной скоростью и постоянным ускорением; и фильтр Калмана, использующий динамическую модель и наблюдения с датчиков (134-137) положения для получения геодезического положения каждого сейсмического приемника (132) с лучшей точностью по сравнению с обеспечиваемой только динамической моделью и только наблюдениями в пределах временного интервала Δt, равного или меньшего, чем минимальное время между взрывами, определяемое группой (120) источников. Технический результат - получение точных геодезических положений всех сейсмических источников и приемников в течение интервала каждого взрыва. 9 з.п. ф-лы, 2 ил.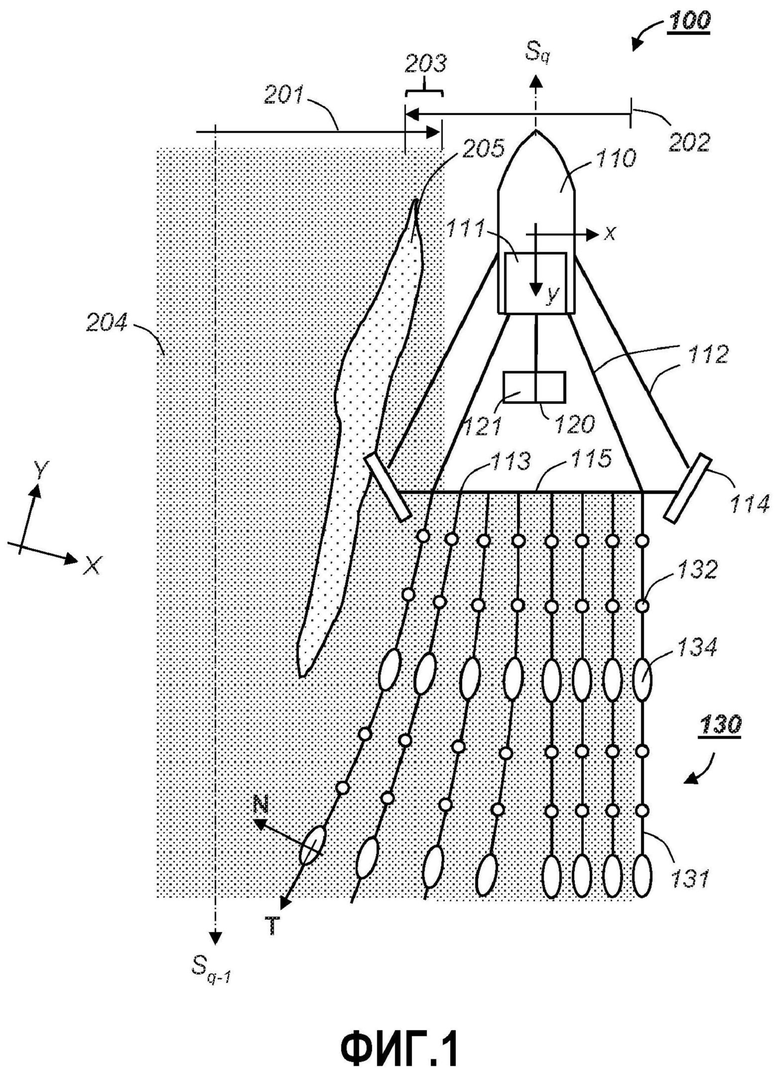
1. Система (100) определения положения при морской сейсмической разведке, содержащая буксирующее судно (110), группу (120) источников и группу (130) приемников с несколькими буксируемыми косами (131), при этом каждая буксируемая коса (131) содержит по меньшей мере три регулятора (134) положения и датчики (134-137) положения, в которой несколько сейсмических приемников (132) помещены между каждой парой регуляторов (134) положения, при этом система (100) отличается
а) динамической моделью, в которой каждая буксируемая коса (131) представлена подобранной B-сплайновой кривой и каждый регулятор (134 положения ассоциирован с постоянной скоростью и постоянным ускорением; и
b) фильтром Калмана, использующим динамическую модель и наблюдения с датчиков (134-137) положения, для получения геодезического положения каждого сейсмического приемника (132) с лучшей точностью по сравнению с обеспечиваемой только динамической моделью и только наблюдениями в пределах временного интервала Δt, равного или меньшего, чем минимальное время между взрывами, определяемое группой (120) источников.
2. Система (100) по п. 1, дополнительно содержащая локальную опору, ограниченную для самое большее четырех последовательных регуляторов (134) положения, так что изменение, задаваемое в любом месте в группе (130) приемников, не влияет на элемент в системе (100) вне этой области.
3. Система (100) по п. 1 или 2, в которой датчик (134-137) положения дополнительно обеспечивает наблюдения скорости и/или ускорения.
4. Система (100) по любому предшествующему пункту, в которой наблюдения выражены в геодезических (X, Y) и/или связанных с судном (x, y, z) координатах.
5. Система (100) по любому предшествующему пункту, дополнительно содержащая систему управления с замкнутым контуром для управления физическими компонентами системы, способными принимать входные данные с фильтра Калмана и изменять знак относительно знака входного вектора и представлять результирующий вектор в качестве реакции.
6. Система (100) по п. 5, в которой входной вектор выражает отклонение от заданного положения в геодезических координатах (X, Y).
7. Система (100) по п. 5, в которой входной вектор выражает отклонение от заданной конфигурации буксируемой косы в связанных с судном координатах (x, y, z).
8. Система (100) по п. 5, в которой входной вектор выражается в системе координат с тангенциальной, нормальной и бинормальной осями (TNB-системе координат), локальной для регулятора (134) положения и/или датчика (134-137) положения.
9. Система (100) по любому предшествующему пункту, в которой преобразование между любой парой систем координат выполняется путем одного матричного умножения.
10. Система (100) по любому предшествующему пункту, дополнительно содержащая линейную экстраполяцию геодезических координат в пределах временного интервала Δt.
| US 5353223 A1, 04.10.1994 | |||
| US 20150134309 A1, 14.05.2015 | |||
| WO 2010111380 A2, 30.09.2010 | |||
| US 20110228635 A1, 22.09.2011 | |||
| US 20140064026 A1, 06.03.2014. |

