ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение относится к электромеханическим приводам, в частности - к системе управления несколькими электромеханическими приводами.
УРОВЕНЬ ТЕХНИКИ
[002] Транспортные средства и другое оборудование или конструкции могут включать в себя конструктивные элементы, перемещаемые или позиционируемые посредством приводов, таких как электромеханические приводы. Например, воздушное или аэрокосмическое транспортное средство включает в себя поверхности управления полетом, перемещаемые или позиционируемые приводами или электромеханическими приводами. Для перемещения и позиционирования одной поверхности управления полетом могут быть использованы несколько приводов. Привод может включать в себя более одного электродвигателя, или несколько отдельных приводов могут быть присоединены к одной и той же поверхности. Эти приводы или двигатели в приводах могут воздействовать на поверхность управления полетом с различными силами или вращательными моментами. Соответственно, приводы вместо слаженной или совместной работы могут противодействовать друг другу при перемещении или позиционировании поверхности. Привод, который работает с выходом за предельные значения или конструктивные параметры или не сработал, может препятствовать или противодействовать работе других приводов, перемещающих указанную поверхность.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[003] В соответствии с одним вариантом реализации система для управления несколькими приводами, присоединенными к конструкции для перемещения и позиционирования указанной конструкции, включает в себя датчик магнитного потока в двигателе каждого привода. Датчик магнитного потока измеряет магнитный поток в соответствующем двигателе и генерирует электрический сигнал, который соответствует магнитному потоку в соответствующем двигателе. Система также включает в себя блок управления, выполненный с возможностью приема электрического сигнала от датчика магнитного потока каждого привода. Блок управления выполнен с возможностью генерирования для каждого привода управляющего командного сигнала, который уравновешивает вращательный момент, прикладываемый к указанной конструкции каждым приводом, исходя из магнитного потока, измеренного в двигателе каждого привода.
[004] В соответствии с другим вариантом реализации система для управления несколькими приводами, присоединенными к конструкции для перемещения и позиционирования указанной конструкции, включает в себя датчик магнитного потока в двигателе каждого привода. Датчик магнитного потока измеряет магнитный поток в соответствующем двигателе и генерирует электрический сигнал, который соответствует магнитному потоку в соответствующем двигателе. Система также включает в себя блок управления, выполненный с возможностью приема электрического сигнала от датчика магнитного потока каждого привода. Блок управления включает в себя двухпороговый детектор, выполненный с возможностью реализации функции, обнаружения того, что плотность магнитного потока конкретного привода выходит за заданные предельные рабочие значения, на основании электрического сигнала, соответствующего магнитному потоку в соответствующем двигателе указанного конкретного привода. Блок управления также включает в себя переключатель потока, выполненный с возможностью реализации функции, включающей в себя деактивирование указанного конкретного привода, когда плотность магнитного потока указанного конкретного привода больше верхнего заданного предельного значения или меньше нижнего заданного предельного значения.
[005] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации переключатель потока также выполнен с возможностью реализации функции, включающей в себя нейтрализацию разности между плотностью магнитного потока двигателя каждого привода.
[006] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации нейтрализация разности между плотностью магнитного потока двигателя каждого привода включает в себя выравнивание плотности магнитного потока двигателя каждого привода путем изменения коэффициента усиления задающей схемы привода, связанной с каждым приводом.
[007] В соответствии с другим вариантом реализации способ управления несколькими приводами, присоединенными к конструкции для перемещения и позиционирования указанной конструкции, включает измерение магнитного потока в двигателе каждого привода и генерирование электрического сигнала, который соответствует магнитному потоку в двигателе. Способ также включает генерирование управляющего командного сигнала для каждого привода, который уравновешивает вращательный момент, прикладываемый к указанной конструкции каждым приводом, исходя из магнитного потока, измеренного в двигателе каждого привода.
[008] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации двигатель каждого привода включает в себя трехфазный электродвигатель, и датчик магнитного потока включает в себя обмотку датчика потока для каждой фазы трехфазного электродвигателя.
[009] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации трехфазный электродвигатель включает в себя кольцевой статор. Кольцевой статор включает в себя множество статорных шипов для каждой фазы. Статорные шипы для каждой фазы распределены последовательно и по отдельности по кольцевому статору. Кольцевой статор также включает в себя фазную обмотку для каждой фазы. Фазная обмотка для каждой фазы намотана вокруг указанного множества статорных шипов, связанных с каждой соответствующей фазой.
[0010] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации обмотка датчика потока для каждой фазы включает в себя вторичную обмотку, намотанную вокруг по меньшей мере одного статорного шипа соответствующей фазы. Электрический ток, протекающий в фазной обмотке конкретной фазы, создает магнитный поток в каждом статорном шипе конкретной фазы, и магнитный поток наводит магнитное поле у каждого статорного шипа. Магнитное поле создает сигнал напряжения в обмотке датчика потока для конкретной фазы. Сигнал напряжения имеет амплитуду, соответствующую уровню магнитного потока в статорном шипе, вокруг которого намотана обмотка датчика потока для конкретной фазы.
[0011] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации обмотка датчика потока для каждой фазы электрически соединена с детектором уровня магнитного потока для каждой фазы. Каждый детектор уровня магнитного потока выполнен с возможностью преобразования сигнала напряжения переменного тока от обмотки соответствующего датчика потока в сигнал напряжения постоянного тока, который соответствует уровню магнитного потока в соответствующей фазе двигателя.
[0012] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации система также включает в себя схему, выполненную с возможностью определения плотности магнитного потока для двигателя на основании сигналов напряжения постоянного тока от трех фаз двигателя. Плотность магнитного потока для двигателя соответствует вращательному моменту, развиваемому двигателем, когда на двигатель подана энергия, а указанная схема выполнена с возможностью генерирования выходного сигнала, который отражает вращательный момент, развиваемый двигателем или приводом и сообщаемый указанной конструкции.
[0013] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации сигналы напряжения постоянного тока от трех фаз двигателя суммируют для получения плотности магнитного потока для двигателя и выходного сигнала, который отражает вращательный момент, развиваемый двигателем или соответствующим приводом и сообщаемый указанной конструкции.
[0014] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации система также включает в себя модуль сравнения и уравновешивания, выполненный с возможностью приема множества выходных сигналов от схем, выполненных с возможностью определения плотности магнитного потока двигателя, связанного с каждым приводом. Каждый выходной сигнал отражает вращательный момент, развиваемый двигателем каждого привода и сообщаемый указанной конструкции. Модуль сравнения и уравновешивания выполнен с возможностью сравнения каждого выходного сигнала и генерирования командного сигнала для каждого привода, который уравновешивает вращательный момент, прикладываемый каждым приводом к указанной конструкции.
[0015] В соответствии еще с одним вариантом реализации или любым из предыдущих вариантов реализации указанной конструкцией является поверхность управления полетом летательного аппарата.
[0016] Раскрытые особенности, функции и преимущества могут быть реализованы независимо в различных вариантах реализации изобретения или могут быть объединены в других вариантах реализации изобретения, подробные сведения о которых можно получить со ссылкой на последующее описание и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] На ФИГ. 1 показана блок-схема примера системы управления с несколькими приводами в соответствии с вариантом реализации раскрытия настоящего изобретения.
[0018] На ФИГ. 2 показан пример электродвигателя для привода, включающего в себя датчики магнитного потока в соответствии еще с одним вариантом реализации раскрытия настоящего изобретения.
[0019] На ФИГ. 3 схематически показан пример устройства определения уровня магнитного потока в соответствии с вариантом реализации раскрытия настоящего изобретения.
[0020] На ФИГ. 4 схематически показан пример схемы для определения вращательного момента двигателя на основании определенного уровня магнитного потока в соответствии с вариантом реализации раскрытия настоящего изобретения.
[0021] На ФИГ. 5 показана блок-схема примера модуля сравнения и уравновешивания вращательных моментов, который уравновешивает вращательный момент или силу, прикладываемый или прикладываемую к указанной конструкции каждым приводом в соответствии с вариантом реализации раскрытия настоящего изобретения.
[0022] На ФИГ. 6 показана блок-схема примера системы управления с несколькими приводами в соответствии еще с одним вариантом реализации раскрытия настоящего изобретения.
[0023] На ФИГ. 7 показана структурная схема примера способа управления несколькими приводами в соответствии с вариантом реализации раскрытия настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0024] Последующее подробное описание вариантов реализации относится к сопроводительным фигурам чертежей, которые иллюстрируют конкретные варианты реализации раскрытия изобретения. Другие варианты его реализации, имеющие отличающиеся конструкции и операции, не отходят от сущности и объема раскрытия настоящего изобретения. Схожие ссылочные позиции могут относится к одному и тому же элементу или компоненту на разных чертежах.
[0025] На ФИГ. 1 показана блок-схема примера системы 100 для управления несколькими приводами 102а-102n или электромеханическими приводами (electromechanical actuator, ЕМА), присоединенными к конструкции 104 для перемещения и позиционирования конструкции 104, в соответствии с вариантом реализации раскрытия настоящего изобретения. Конструкция 104 может представлять собой любой тип конструкции или компонента устройства или узла 106, который требует нескольких приводов 102а-102n для перемещения и позиционирования конструкции 104 относительно устройства или узла 106. В соответствии с одним вариантом реализации конструкция 104 представляет собой поверхность управления полетом летательного аппарата. В другом примере конструкция 104 представляет собой подвижный компонент, такой как дверь, обтекатель, внешнее устройство и т.п., конструкцию гражданского назначения, такую как здание, мост, или иную конструкцию гражданского назначения, а указанные несколько приводов 102а-102n перемещают подвижный компонент относительно конструкции гражданского назначения. Система 100, описанная в настоящем документе, может быть выполнена с возможностью перемещения любой конструкции относительно другой конструкции, для которой требуется несколько приводов. Указанные несколько отдельных приводов 102а-102n присоединены к устройству или узлу 106 и засоединены на конструкции 104 любым подходящим устройством. Указанные несколько приводов 102а-102n перемещают и позиционируют конструкцию 104 относительно узла 106 исходя из электрического сигнала, такого как сигнал положения или сигнал 108 угла от интерфейса 110 или системы управления полетом в приведенном в качестве примера варианте реализации, в котором указанным устройством или узлом 106 является летательный аппарат.
[0026] Каждый привод 102а-102n включает в себя электродвигатель 112. В соответствии с одним вариантом реализации электродвигатель 112 является трехфазным электродвигателем. Двигатель 112 каждого привода 102а-102n механически соединен с группой зубчатых колес 114 или редуктором. Группа зубчатых колес 114 каждого привода 102а-102n механически присоединена или присоединена к конструкции 104 или управляющей поверхности летательного аппарата любым подходящим устройством. Как описано в настоящем документе, двигатель 112 выполнен с возможностью управления им во время работы для получения конкретного вращательного момента 116 или конкретной силы, который или которая механически передается в конструкцию 104 группой зубчатых колес 114 для перемещения конструкции 104 с заданной скоростью и позиционирования конструкции 104 в заданном положений или под заданным углом относительно узла 106 или летательного аппарата исходя из сигнала 108 положения или угла.
[0027] Система 100 включает в себя датчик 118 магнитного потока в двигателе 112 каждого привода 102а-102n. Датчик 118 магнитного потока измеряет магнитный поток 120 в соответствующем двигателе 112, обусловленный подачей электрического тока на соответствующий двигатель 112 для обеспечения работы двигателя 112. Магнитный поток создает сигнал 122 электрического напряжения, который соответствует или пропорционален напряженности магнитного поля, создаваемого магнитным потоком 120 в соответствующем двигателе 112. В соответствии с вариантом реализации, в котором двигатель 112 представляет собой трехфазный электродвигатель, датчик 118 магнитного потока включает в себя датчик 118 магнитного потокаа-118с (ФИГ. 2) для каждой фазы. Датчик 118а-118с магнитного потока, связанный с каждой фазой, измеряет магнитный поток в соответствующей фазе. Пример датчика 118 магнитного потока или датчика 118а-118с магнитного потока для каждой фазы трехфазного электродвигателя 112 будет описан со ссылкой на ФИГ. 2.
[0028] Система 100 также включает в себя блок 124 управления, выполненный с возможностью приема сигнала 122 электрического напряжения от датчика 118 магнитного потока или датчиков 118а-118с магнитного потока каждого привода 102а-102n. Блок 124 управления выполнен с возможностью генерирования отдельного управляющего командного сигнала 126 для каждого привода 102а-102n или для задающей схемы 127 электромеханического привода, связанной с каждым приводом 102а-102n, так что указанный управляющий командный сигнал 126 уравновешивает вращательный момент 116, прикладываемый к конструкции 104 каждым приводом 102а-102n, исходя из магнитного потока 120, измеренного в двигателе 112 каждого привода 102а-102n.
[0029] В соответствии с одним вариантом реализации блок 124 управления включает в себя устройство 128 определения уровня магнитного потока, связанное с каждым датчиком 118 магнитного потока. Как описано более подробно в настоящем документе, датчик 118 магнитного потока связан с каждой фазой трехфазного электродвигателя 112 каждого привода 102а-102n. Каждое устройство 128 определения уровня магнитного потока генерирует электрический сигнал, который соответствует уровню магнитного потока в соответствующей фазе двигателя 112. Электрический сигнал, соответствующий уровню магнитного потока для каждой фазы конкретного двигателя 112, передают в схему 130 определения плотности магнитного потока или вращательного момента на основании уровня магнитного потока в каждой фазе конкретного двигателя 112. Схема 130 для определения плотности магнитного потока или вращательного момента связана с каждым приводом 102а-102n. Пример устройства 128 определения уровня магнитного потока будет описан со ссылкой на ФИГ. 3, а пример схемы 130 для определения плотности магнитного потока или вращательного момента, развиваемого двигателем 112 каждого привода 102а-102n, будет описан со ссылкой на ФИГ. 4.
[0030] В соответствии с одним вариантом реализации блок 124 управления также включает в себя модуль 132 сравнения и уравновешивания вращательных моментов. Модуль 132 сравнения и уравновешивания вращательных моментов принимает выходной сигнал от каждой схемы 130, отражающий вращательный момент 116, развиваемый двигателем 112 каждого привода 102а-102n и сообщаемый конструкции 104. Модуль 132 сравнения и уравновешивания вращательных моментов выполнен с возможностью сравнения каждого выходного сигнала от схемы 130 и генерирования командного сигнала 126 для каждого привода 102а-102n, который уравновешивает вращательный момент 116, прикладываемый каждым приводом 102а-102n к конструкции 104. Уравновешивание вращательного момента 116, прикладываемого каждым из приводов 102а-102n, предотвращает противодействие приводов 102а-102n друг другу, так что приводы 102а-102n действуют слаженно при перемещении и позиционировании конструкции 104. Пример модуля 132 сравнения и уравновешивания вращательных моментов будет описан со ссылкой на ФИГ. 5. Любое устройство или схема или комбинация устройств или схем, выполненных с возможностью сравнения нескольких сигналов и генерирования выходных сигналов для уравновешивания вращательных моментов, прикладываемых каждым приводом 102а-102n, могут быть использованы для модуля 132 сравнения и уравновешивания вращательных моментов.
[0031] В соответствии с примером варианта реализации по ФИГ. 1 система 100 включает в себя датчик или датчики 134 положения или угла для определения фактического положения или угла конструкции 104 или поверхности управления полетом относительно узла 106 или летательного аппарата. Датчик или датчики 134 положения или угла передает или передают сигнал 136 фактического положения, соответствующий фактическому положению или углу конструкции 104, в блок 124 управления. Блок 124 управления сравнивает фактическое положение или фактический угол конструкции 104 с сигналом положения или сигналом 108 угла от интерфейса 110 или системы управления полетом, чтобы проверить нахождение конструкции 104 в правильном положении или под правильным углом.
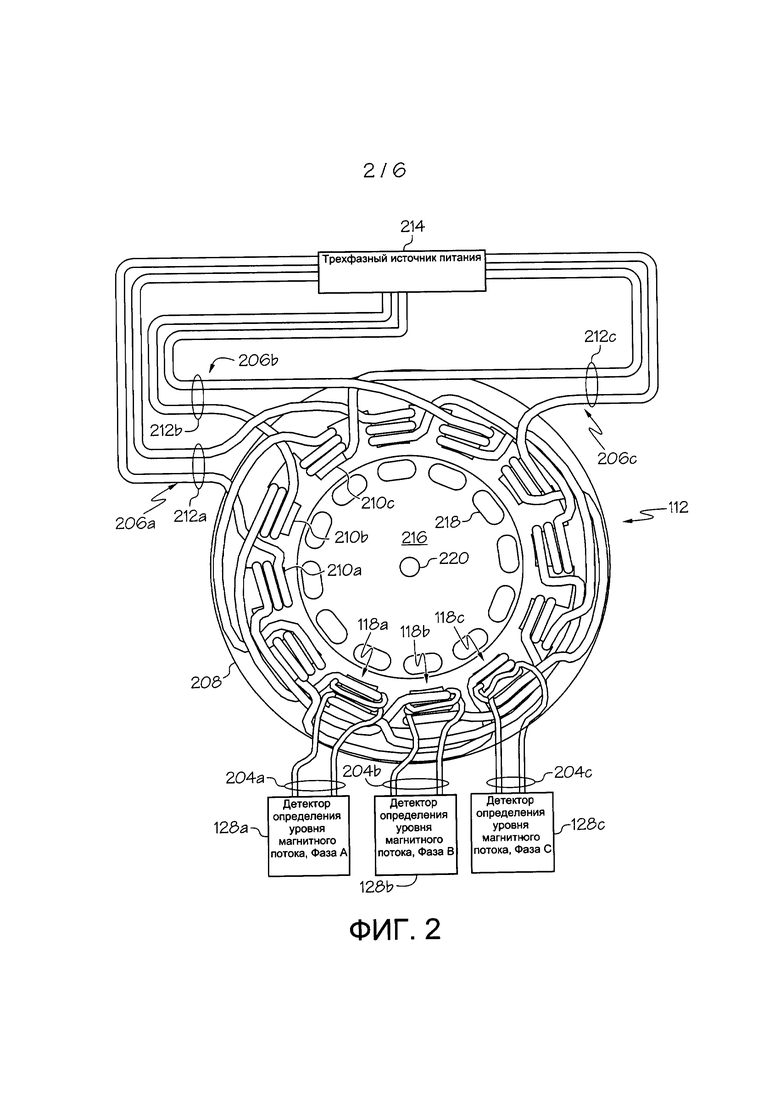
[0032] Также на ФИГ. 2 показан пример трехфазного электродвигателя 112 для привода, содержащего датчики 118а, 118b и 118с магнитного потока в соответствии с вариантом реализации раскрытия настоящего изобретения. Как описано выше, в соответствии с одним вариантом реализации двигатель 112 каждого привода 102а-102n по ФИГ. 1 представляет собой трехфазный электродвигатель 112, а датчики 118а, 118b и 118с магнитного потока включают в себя соответствующую обмотку 204а, 204b и 204с датчика потока для каждой фазы 206а, 206b и 206с трехфазного электродвигателя 112.
[0033] Трехфазный электродвигатель 112 включает в себя кольцевой статор 208. Кольцевой статор 208 включает в себя множество статорных шипов 210а, 210b и 210с. Каждая фаза 206а, 206b, 206с включает в себя соответствующее множество статорных шипов 210а, 210b и 210с. Статорные шипы 210а, 210b и 210с для каждой фазы 206а, 206b и 206с распределены последовательно и по отдельности по кольцевому статору 208.
[0034] Кольцевой статор 208 также включает в себя фазную обмотку 212а, 212b и 212с для каждой фазы 206а, 206b и 206с. Фазная обмотка 212а, 212b и 212с для каждой фазы намотана вокруг указанного множества статорных шипов 210а, 210b и 210с, связанных с каждой соответствующей фазой 206а, 206b и 206с. Фазная обмотка 212а, 212b и 212с намотана один или более раз вокруг статорного шипа 210а, 210b и 210с. Каждая из фазных обмоток 212а, 212b и 212с электрически соединена с соответствующей фазой трехфазного источника 214 питания.
[0035] Обмотка 204а, 204b, 204с датчика потока для каждой фазы 206а, 206b и 206с является вторичной обмоткой, намотанной вокруг по меньшей мере одного статорного шипа 210а, 210b и 210с соответствующей фазы 206а, 206b или 206с. В соответствии с вариантом реализации, показанным на ФИГ. 2, обмотка 204а, 204b и 204с датчика потока намотана вокруг одного статорного шипа 210а, 210b и 210с для каждой фазы 206а, 206b и 206с. Обмотка 204а, 204b и 204с датчика потока для каждой фазы 206а, 206b и 206с намотана один или более раз вокруг соответствующего статорного шипа 210а, 210b и 210с для каждой фазы 206а, 206b и 206с. Электрический ток, протекающий в фазной обмотке 212а, 212b или 212с конкретной фазы 206а, 206b или 206с, создает магнитный поток в каждом статорном шипе 210а, 210b и 210с конкретной фазы 206а, 206b или 206с, а магнитный поток наводит магнитное поле у каждого статорного шипа 210а, 210b или 210с конкретной фазы, запитываемой электрическим током. Магнитное поле создает сигнал напряжения в обмотке 204а, 204b или 204с датчика потока для конкретной фазы. Сигнал напряжения имеет амплитуду, которая соответствует или пропорциональна напряженности магнитного поля, которая соответствует уровню магнитного потока в статорном шипе 210а, 210b или 210с, вокруг которого намотана обмотка 204а, 204b или 204с датчика потока для конкретной фазы.
[0036] Обмотка 204а, 204b и 204с датчика потока для каждой фазы 206а, 206b и 206с электрически соединена с устройством 128а, 128b и 128с определения уровня магнитного потока для каждой фазы. Соответственно, каждый привод 102а-102n (ФИГ. 1) связан с устройством 128а, 128b и 128с определения уровня магнитного потока для каждой фазы трехфазного электродвигателя 112. Обмотка 204а, 204b и 204с датчика потока измеряет уровень магнитного потока, создаваемого в каждой фазе 206а, 206b и 206с трехфазного электродвигателя 112, когда трехфазным источником 214 питания соответственно подается электрический ток на каждую фазу для обеспечения работы двигателя 112. В соответствии с вариантом реализации и как описано выше, устройства 128а, 128b и 128с определения уровня магнитного потока для каждой фазы для каждого привода 102а-102n являются компонентами блока 124 управления. Еще в одном варианте реализации устройства 128а, 128b и 128с определения уровня магнитного потока для каждого привода 102а-102n выполнены отдельно от блока 124 управления или расположены в другом компоненте системы 100.
[0037] Трехфазный электродвигатель 112 также включает в себя ротор 216, расположенный внутри кольцевого статора 208. В соответствии с примером варианта реализации, показанным на ФИГ. 2, ротор 216 имеет круглую или дисковую форму. Ротор 216 включает в себя множество магнитов 218 или постоянных магнитов, расположенных по окружности вокруг ротора 216 вблизи внешней кромки ротора 216. Магниты 218 расположены на расстоянии друг от друга, чтобы совпадать со статорными шипами 210а, 210b, 210с. Соответственно, при последовательном запитывании обмотки 212а, 212b и 212с каждой фазы посредством трехфазного источника 214 питания, магниты 218 притягиваются магнитным полем, создаваемым на каждом статорном шипе 210, при запитывании каждой соответствующей фазы 206а, 206b и 206с, заставляя ротор 216 вращаться внутри кольцевого статора 208. С группой зубчатых колес 114 (ФИГ. 1) механически связана ступица или ведущая ось 220 для прикладывания вращательного момента 116 от двигателя 112 к конструкции 104 для перемещения и позиционирования конструкции 104 аналогично тому, как описано ранее.
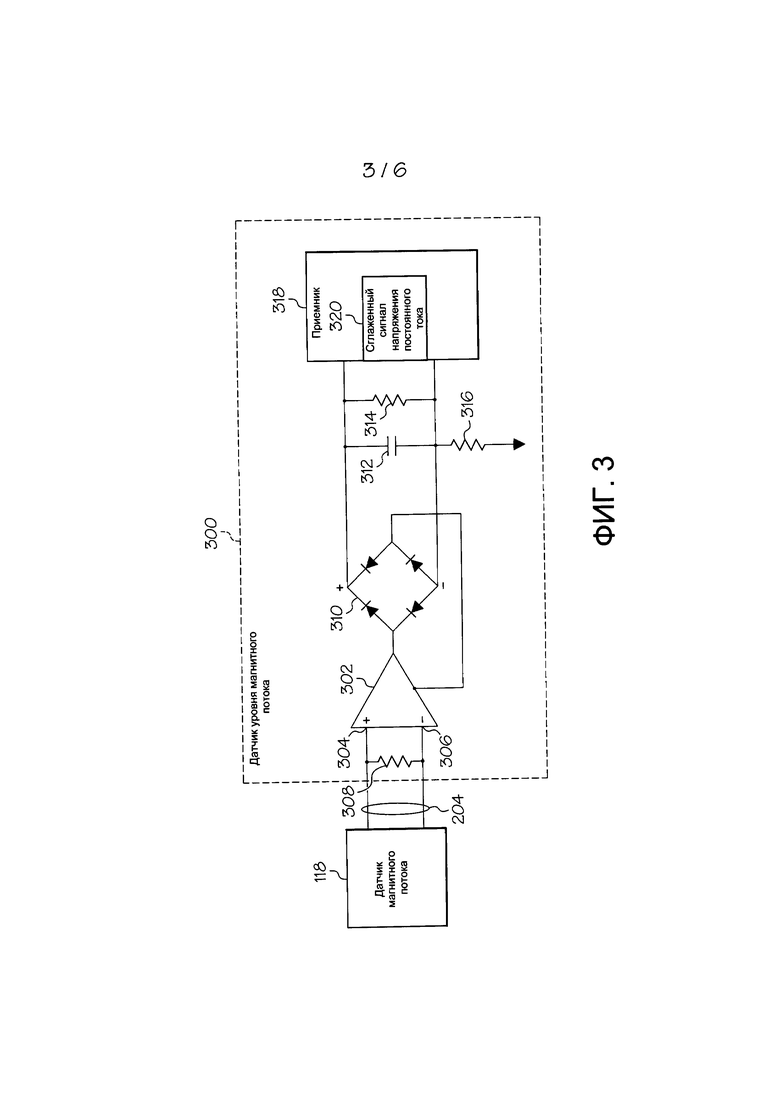
[0038] На ФИГ. 3 схематически показан пример устройства 300 определения уровня магнитного потока в соответствии с вариантом реализации раскрытия настоящего изобретения. В соответствии с одним вариантом реализации устройство 300 определения уровня магнитного потока используется для каждого устройства 128а-128с определения уровня магнитного потока по ФИГ. 1 и 2. Устройство 300 определения уровня магнитного потока выполнено с возможностью преобразования сигнала напряжения переменного тока от соответствующего датчика 118а, 118b или 118с магнитного потока или обмотки 204а, 204b или 204с датчика потока, в сигнал напряжения постоянного тока, который соответствует уровню магнитного потока в соответствующей фазе двигателя 112. Приведенное в качестве примера устройство 300 определения уровня магнитного потока включает в себя усилитель 302 с положительной входной клеммой 304, соединенной с одним концом обмотки 204 датчика потока, и отрицательной входной клеммой 306, электрически соединенной с другим концом обмотки 204 датчика потока. Концы обмотки 204 датчика потока закорочены замыкающим резистором 308 на входе в усилитель 302 для обеспечения входного напряжения на усилителе 302. Номинал замыкающего резистора 308 выбирают для обеспечения требуемого входного напряжения на усилителе 302 и на основании уровня магнитного потока 120, измеряемого датчиком 118 магнитного потока.
[0039] Мостовой выпрямитель 310 принимает выходной сигнал от усилителя 302 для преобразования сигнала напряжения переменного тока в сигнал напряжения постоянного тока. Сглаживающий конденсатор 312 сглаживает или удаляет любые пульсации или шум в выходном сигнале напряжения постоянного тока от мостового выпрямителя 310. Стабилизирующий нагрузочный резистор 314 подключен к потенциалу заземления через заземляющий резистор 316 для разрядки сглаживающего конденсатора 312. Приемник 318 принимает сглаженный сигнал 320 напряжения постоянного тока или выходной сигнал напряжения постоянного тока. Сглаженный сигнал 320 напряжения постоянного тока соответствует уровню магнитного потока в конкретной фазе двигателя 112, связанной с датчиком 118 магнитного потока. В соответствии с другим вариантом реализации мостовой выпрямитель 310 заменен схемой или устройством для определения скорости изменения магнитного потока 120, определенного датчиком 118 магнитного потока. Скорость изменения магнитного потока 120 преобразуют в сигнал 320 напряжения постоянного тока, который соответствует скорости изменения магнитного потока 120, значение которой используют для управления вращательным моментом 116, прикладываемым каждым приводом 102а-102n к конструкции 104, как описано в настоящем документе.
[0040] На ФИГ. 4 схематически показан пример схемы 400 для определения вращательного момента 402 двигателя на основании определенного уровня магнитного потока в соответствии с вариантом реализации раскрытия настоящего изобретения. В соответствии с одним вариантом реализации схема 400 является компонентом блока 124 управления по ФИГ. 1. Еще в одном варианте реализации схема 400 является компонентом, выполненным отдельно от блока 124 управления. Схема 400 выполнена с возможностью определения плотности магнитного потока для соответствующего двигателя 112 на основании сигналов 320 напряжения постоянного тока от каждой из трех фаз соответствующего двигателя 112. Схема 400 включает в себя усилитель 404а-404с для приема выходного сигнала 322а-322с напряжения постоянного тока от приемника 318а-318с устройства 128а-128с определения уровня магнитного потока (ФИГ. 2) или устройства 300 (ФИГ. 3), связанного с каждой фазой 206а-206с соответствующего двигателя 112. Каждый выходной сигнал 322а-322с напряжения постоянного тока соответствует сглаженным сигналам 320 напряжения постоянного тока для одной из трех фаз двигателя 112. Сигналы 322а-322с напряжения постоянного тока, усиленные соответствующими усилителями 404а-404с, суммируют суммирующим устройством 406. Сумма сигналов 322а-322с напряжения постоянного тока, связанных с каждой фазой 206а-206с соответствующего двигателя 112, обеспечивает плотность магнитного потока для соответствующего двигателя 112. Плотность магнитного потока для соответствующего двигателя 112 соответствует вращательному моменту 402, развиваемому соответствующим двигателем 112, когда на двигатель 112 подана энергия. Схема 400 выполнена с возможностью генерирования выходного сигнала 408, который отражает вращательный момент 402, развиваемый двигателем 112 и сообщаемый конструкции 104.
[0041] На ФИГ. 5 показана блок-схема примера модуля 132 сравнения и уравновешивания вращательных моментов, который уравновешивает вращательный момент или силу, прикладываемый или прикладываемую к конструкции 104 каждым приводом 102а-102n в соответствии с вариантом реализации раскрытия настоящего изобретения. В соответствии с одним вариантом реализации модуль 132 сравнения и уравновешивания вращательных моментов используется для модуля 132 сравнения и уравновешивания вращательных моментов по ФИГ. 1 и является компонентом блока 124 управления. Еще в одном варианте реализации модуль 132 сравнения и уравновешивания вращательных моментов является компонентом, выполненным отдельно от блока 124 управления. Модуль 132 сравнения и уравновешивания вращательных моментов принимает множество выходных сигналов 408а-408n. Каждый выходной сигнал 408а-408n отражает вращательный момент 402, развиваемый двигателем 112 каждого привода 102а-102n и сообщаемый конструкции 104. Модуль 132 сравнения и уравновешивания вращательных моментов выполнен с возможностью отслеживания и сравнения каждого выходного сигнала 408а-408n. Любые различия между выходными сигналами 408а-408n соответствуют разностям значений вращательного момента 402, прикладываемых соответствующими двигателями 112, или вращательному моменту 116, прикладываемому соответствующими приводами 102а-102n к конструкции 104. Вращательный момент 402 двигателя, развиваемый двигателем 112, передается группой зубчатых колес 114 и прикладывается к конструкции 104 группой зубчатых колес 114 в качестве соответствующего вращательного момента 116. Разности между выходными сигналами 408а-408n обнуляют или выравнивают посредством модулей 132 сравнения и уравновешивания вращательных моментов для генерирования управляющего командного сигнала 410а-420n для каждого привода 102а-102n, который уравновешивает вращательный момент 116 или силу, прикладываемый или прикладываемую каждым приводом 102а-102n к конструкции 104 (ФИГ. 1).
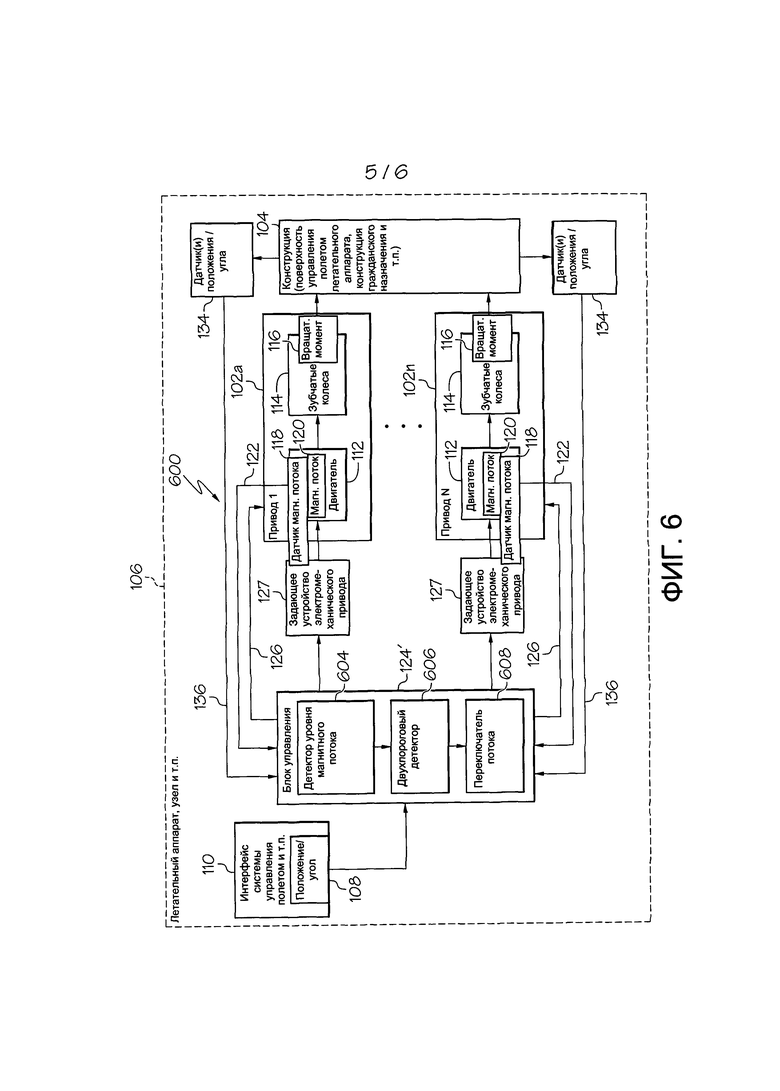
[0042] На ФИГ. 6 показана блок-схема примера системы 600 управления с несколькими приводами в соответствии еще с одним вариантом реализации раскрытия настоящего изобретения. Система 600 управления с несколькими приводами схожа с системой 100 управления с приводами по ФИГ. 1 за исключением того, что система 600 управления включает в себя отличающийся или модифицированный блок 124' управления. Блок 124' управления включает в себя модуль 604 для определения плотности магнитного потока для каждого двигателя 112. В соответствии с примером варианта реализации, показанным на ФИГ. 6, модуль 604 для определения плотности магнитного потока каждого двигателя 112 включает в себя устройство 128 или 300 определения уровня магнитного потока, связанное с каждой фазой каждого двигателя 112, и схему 130 или 400, связанную с каждым двигателем 112, для определения плотности магнитного потока каждого двигателя 112.
[0043] Блок 124' управления также включает в себя двухпороговое устройство 606 определения и переключатель 608 потока. Двухпороговое устройство 606 определения выполнено с возможностью реализации функции, включающей в себя определение, не выходит ли плотность магнитного потока конкретного привода 102а-102n за заданные предельные рабочие значения. Переключатель 608 потока выполнен с возможностью реализации функции, включающей в себя деактивирование указанного конкретного привода 102а-102n, когда плотность магнитного потока указанного конкретного привода 102а-102n больше верхнего заданного предельного значения или меньше нижнего заданного предельного значения. В соответствии с одним вариантом реализации переключатель 608 потока также выполнен с возможностью реализации функции, включающей в себя нейтрализацию разности между плотностью магнитного потока двигателя 112 каждого привода 102а-102n. Нейтрализация разности между плотностью магнитного потока двигателя 112 каждого привода 102а-102n включает в себя выравнивание плотности магнитного потока двигателя 112 каждого привода 102а-102n путем изменения коэффициента усиления задающей схемы 127 электромеханического привода, связанной с каждым приводом 102а-102n. В соответствии с одним вариантом реализации, переключатель 608 потока или блока 124' управления отправляет командный сигнал на каждую задающую схему 127 электромеханического привода, который вызывает такой коэффициент усиления или такую амплитуду управляющего напряжения, запитывающего каждый двигатель 112, чтобы обеспечивать сообщение конструкции 104 эквивалентного вращательного момента 116 каждым приводом 102а-102n.
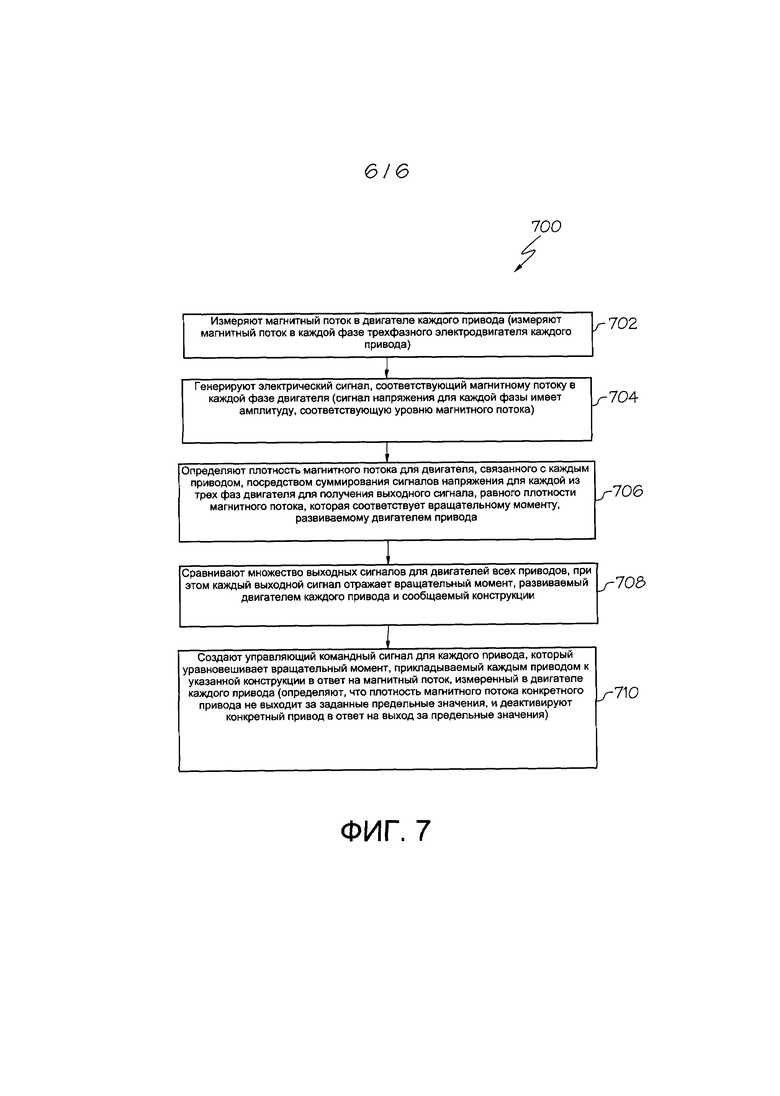
[0044] На ФИГ. 7 показана структурная схема примера способа 700 управления несколькими приводами в соответствии с вариантом реализации раскрытия настоящего изобретения. В соответствии с одним вариантом реализации способ 700 реализуется и осуществляется системой 100 по ФИГ. 1 или системой 600 по ФИГ. 6. Указанные несколько приводов схожи с приводами 102а-102n по ФИГ. 1 и присоединены к конструкции 104 для перемещения и позиционирования конструкции 104 аналогично описанному ранее. В блоке 702 измеряют магнитный поток в двигателе каждого привода. В соответствии с одним вариантом реализации, двигатель представляет собой трехфазный электродвигатель, а магнитный поток измеряют в каждой фазе трехфазного электродвигателя каждого привода. В блоке 704 генерируют электрический сигнал, который соответствует магнитному потоку в каждой фазе двигателя. Для каждой фазы генерируют сигнал напряжения, который имеет амплитуду, соответствующую уровню магнитного потока в соответствующей фазе двигателя.
[0045] В блоке 706 определяют плотность магнитного потока для двигателя, связанного с каждым приводом, посредством суммирования сигналов напряжения для каждой из трех фаз двигателя для получения выходного сигнала, который равен плотности магнитного потока соответствующего двигателя. Плотность магнитного потока для двигателя соответствует вращательному моменту, развиваемому двигателем. Для каждого привода генерируют множество выходных сигналов, каждый из которых отражает плотность магнитного потока соответствующего двигателя каждого привода, и каждая плотность магнитного потока соответствует вращательному моменту, развиваемому соответствующим двигателем.
[0046] В блоке 708 сравнивают указанное множество выходных сигналов. В блоке 710 для каждого привода генерируют управляющий командный сигнал, который уравновешивает вращательный момент, прикладываемый к конструкции каждым приводом, исходя из магнитного потока, измеренного в двигателе каждого привода. Аналогично тому, как описано выше, любые разности между выходными сигналами обнуляют или выравнивают при генерировании управляющего командного сигнала для каждого двигателя привода, так что вращательный момент, прикладываемый к конструкции каждым приводом, уравновешен.
[0047] В соответствии с другим вариантом реализации определяют, выходит ли плотность магнитного потока конкретного привода за заданные предельные рабочие значения. Определяют плотность магнитного потока двигателя каждого привода и сравнивают ее с верхним заданным предельным значением и нижним заданным предельным значением. Деактивируют конкретный привод, когда плотность магнитного потока указанного конкретного привода больше верхнего заданного предельного значения или меньше нижнего заданного предельного значения.
[0048] В соответствии еще с одним вариантом реализации нейтрализуют или выравнивают разность между плотностью магнитного потока двигателя каждого привода. Для каждого привода генерируют командный сигнал и отправляют его в ответ на нейтрализацию или выравнивание плотности магнитного потока двигателя каждого привода для уравновешивания вращательного момента, прикладываемого к конструкции каждым приводом.
[0049] Представленные на фигурах чертежей блок-схемы и структурные схемы иллюстрируют архитектуру, функциональность и работу возможных вариантов осуществления систем или способов согласно различным вариантам реализации раскрытия настоящего изобретения. В этой связи каждый блок в структурной схеме или блок-схемах может представлять модуль, сегмент или часть инструкций, который или которая содержит одну или более инструкций, подлежащих выполнению, для реализации конкретной логической функции (функций). В некоторых альтернативных вариантах осуществления функции, представленные в блоке, могут быть реализованы вне порядка, показанного на фигурах чертежей. Например, два блока, показанных последовательно, в действительности могут быть выполнены по существу одновременно, или указанные блоки могут быть выполнены в обратном порядке, в зависимости от задействованной функциональности. Следует также отметить, что каждый блок показанных блок-схем и/или структурной схемы и комбинации блоков в показанных блок-схемах и/или структурной схеме может быть реализован с помощью систем на основе специализированных аппаратных средств, которые реализуют конкретные функции или действия или реализуют комбинации специализированных аппаратных средств и компьютерных инструкций.
[0050] Терминология, использованная в настоящем документе, предназначена только для целей описания конкретных вариантов реализации и не предназначена для ограничения вариантов реализации раскрытия изобретения. Как использовано в настоящем документе, грамматические показатели единственного числа предназначены также для включения форм множественного числа, если из контекста явно не следует иное. Следует также понимать, что выражения "содержит" и/или "содержащий" при использовании в настоящем документе, указывают на наличие указанных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают существование дополнительных одного или более других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их групп.
[0051] Соответствующие конструкции, материалы, действия и эквиваленты всех средств или элементов "этап плюс функция" в формуле изобретения, следующей ниже, предназначены для включения любой конструкции, материала или действия для выполнения функции в сочетании с другими представленными в формуле элементами, как конкретно заявлено в формуле изобретения. Описание вариантов реализации настоящего изобретения было представлено в целях иллюстрации и описания, однако оно не претендует на исчерпывающий характер или не ограничивается раскрытыми вариантами осуществления изобретения. Специалисту в данной области техники будут очевидны многие его модификации и варианты без выхода за пределы объема и сущности вариантов осуществления изобретения.
[0052] Хотя в настоящем документе были проиллюстрированы и описаны конкретные варианты реализации, специалистам в данной области техники будет понятно, что любая конструкция, рассчитанная на достижение той же цели, может быть заменена для показанных конкретных вариантов реализации изобретения и что варианты его реализации имеют другие возможности применения в других условиях. Настоящая заявка охватывает любые модификации и варианты реализации данного изобретения. Следующая ниже формула изобретения ни в коей мере не предназначена для ограничения объема настоящего изобретения раскрытыми в настоящем документе вариантами его реализации.


Группа изобретений относится к системе и способу управления несколькими электромеханическими приводами, присоединенными к конструкции для ее перемещения и позиционирования. Система содержит датчик магнитного потока в двигателе каждого привода, блок управления. Блок управления содержит двухпороговый детектор и переключатель потока. Для осуществления способа измеряют магнитный поток в двигателе каждого привода, генерируют электрический сигнал, который соответствует магнитному потоку в двигателе, генерируют управляющий командный сигнал для каждого привода, который уравновешивает вращательный момент, прикладываемый к указанной конструкции каждым приводом. Обеспечивается координация совместной работы нескольких приводов. 2 н. и 16 з.п. ф-лы, 7 ил.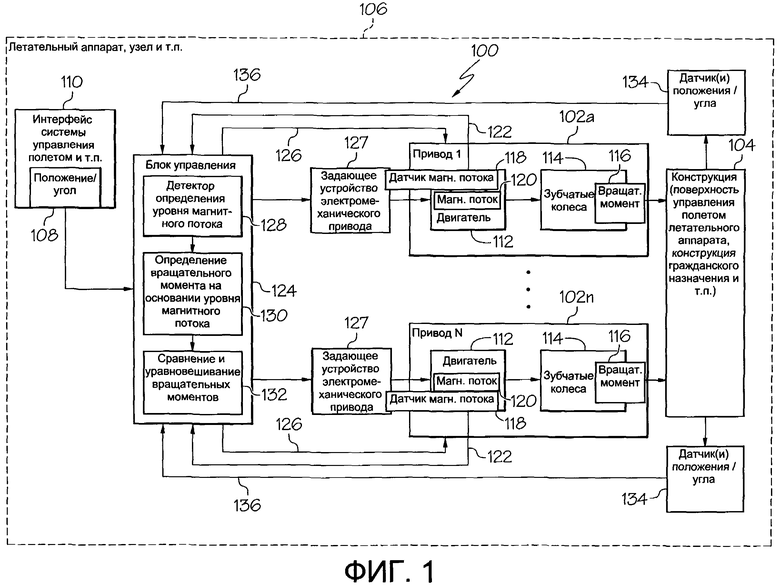
1. Система управления несколькими приводами, присоединенными к конструкции, для перемещения и позиционирования указанной конструкции, содержащая:
- датчик магнитного потока в двигателе каждого привода, выполненный с возможностью измерения магнитного потока в соответствующем двигателе и генерирования электрического сигнала, который соответствует магнитному потоку в соответствующем двигателе; и
- блок управления, выполненный с возможностью приема электрического сигнала от датчика магнитного потока каждого привода и содержащий:
двухпороговый детектор, выполненный с возможностью реализации функции обнаружения того, что плотность магнитного потока конкретного привода выходит за заданные предельные рабочие значения, на основании электрического сигнала, соответствующего магнитному потоку в соответствующем двигателе указанного конкретного привода; и
переключатель потока, выполненный с возможностью реализации функции, включающей деактивирование указанного конкретного привода, когда плотность магнитного потока указанного конкретного привода больше верхнего заданного предельного значения или меньше нижнего заданного предельного значения.
2. Система по п. 1, в которой
двигатель каждого привода содержит трехфазный электродвигатель, а
датчик магнитного потока содержит обмотку датчика потока для каждой фазы трехфазного электродвигателя.
3. Система по п. 2, в которой трехфазный электродвигатель содержит кольцевой статор, содержащий:
множество статорных шипов для каждой фазы, распределенных последовательно и по отдельности по кольцевому статору; и
фазную обмотку для каждой фазы, намотанную вокруг указанного множества статорных шипов, связанных с каждой соответствующей фазой.
4. Система по п. 3, в которой обмотка датчика потока для каждой фазы содержит вторичную обмотку, намотанную вокруг по меньшей мере одного статорного шипа соответствующей фазы, при этом
электрический ток, протекающий в фазной обмотке конкретной фазы, создает магнитный поток в каждом статорном шипе этой конкретной фазы, и магнитный поток наводит магнитное поле у каждого статорного шипа,
магнитное поле создает сигнал напряжения в обмотке датчика потока для конкретной фазы, причем
сигнал напряжения имеет амплитуду, соответствующую уровню магнитного потока в статорном шипе, вокруг которого намотана обмотка датчика потока для этой конкретной фазы.
5. Система по п. 2, в которой обмотка датчика потока для каждой фазы электрически соединена с детектором уровня магнитного потока для каждой фазы, причем
каждый детектор уровня магнитного потока выполнен с возможностью преобразования сигнала напряжения переменного тока от обмотки соответствующего датчика потока в сигнал напряжения постоянного тока, который соответствует уровню магнитного потока в соответствующей фазе двигателя.
6. Система по п. 5, также содержащая схему, выполненную с возможностью определения плотности магнитного потока для двигателя на основании сигналов напряжения постоянного тока от трех фаз двигателя, причем
плотность магнитного потока для двигателя соответствует вращательному моменту, развиваемому двигателем, когда на двигатель подана энергия, а
указанная схема выполнена с возможностью генерирования выходного сигнала, который отражает вращательный момент, развиваемый двигателем и сообщаемый указанной конструкции.
7. Система по п. 6, в которой обеспечена возможность суммирования сигналов напряжения постоянного тока от трех фаз двигателя для получения плотности магнитного потока для двигателя и указанного выходного сигнала.
8. Система по п. 6, также содержащая модуль сравнения и уравновешивания, выполненный с возможностью приема множества выходных сигналов, каждый из которых отражает вращательный момент, развиваемый двигателем каждого привода и сообщаемый указанной конструкции, причем
модуль сравнения и уравновешивания выполнен с возможностью сравнения каждого выходного сигнала и создания командного сигнала для каждого привода, который уравновешивает вращательный момент, прикладываемый каждым приводом к указанной конструкции.
9. Система по п. 1, в которой переключатель потока также выполнен с возможностью реализации функции, содержащей нейтрализацию разности между плотностью магнитного потока двигателя каждого привода.
10. Система по п. 9, в которой нейтрализация разности между плотностью магнитного потока двигателя каждого привода включает выравнивание плотности магнитного потока двигателя каждого привода путем изменения коэффициента усиления задающей схемы привода, связанной с каждым приводом.
11. Система по п. 1, в которой указанная конструкция является поверхностью управления полетом летательного аппарата.
12. Способ управления несколькими приводами, присоединенными к конструкции, для перемещения и позиционирования указанной конструкции, включающий:
измерение магнитного потока в двигателе каждого привода и генерирование электрического сигнала, который соответствует магнитному потоку в двигателе; и
генерирование управляющего командного сигнала для каждого привода, который уравновешивает вращательный момент, прикладываемый к указанной конструкции каждым приводом, исходя из магнитного потока, измеренного в двигателе каждого привода.
13. Способ по п. 12, согласно которому двигатель каждого привода содержит трехфазный электродвигатель, а
измерение магнитного потока в двигателе включает измерение магнитного потока в каждой фазе.
14. Способ по п. 13, также включающий генерирование сигнала напряжения для каждой фазы, который имеет амплитуду, соответствующую уровню магнитного потока в каждой фазе двигателя.
15. Способ по п. 14, также включающий определение плотности магнитного потока для двигателя, связанного с каждым приводом, посредством суммирования сигналов напряжения для трех фаз двигателя с получением выходного сигнала, который равен плотности магнитного потока, причем
плотность магнитного потока для двигателя соответствует вращательному моменту, развиваемому двигателем.
16. Способ по п. 15, также включающий:
сравнение множества выходных сигналов, каждый из которых отражает вращательный момент, развиваемый двигателем каждого привода и сообщаемый указанной конструкции; и
генерирование командного сигнала для каждого привода, который уравновешивает вращательный момент, прикладываемый каждым приводом к указанной конструкции.
17. Способ по п. 15, также включающий:
определение, что плотность магнитного потока конкретного привода выходит за заданные предельные рабочие значения; и
деактивирование указанного конкретного привода, когда плотность магнитного потока указанного конкретного привода больше верхнего заданного предельного значения или меньше нижнего заданного предельного значения.
18. Способ по п. 17, также включающий нейтрализацию разности между плотностью магнитного потока двигателя каждого привода.
| СИСТЕМА УПРАВЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНИМ ПРИВОДОМ КАПОТОВ РЕВЕРСОРА ТЯГИ ДЛЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ И СПОСОБ ТЕСТИРОВАНИЯ СИСТЕМЫ | 2008 |
|
RU2492518C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 0 |
|
SU248833A1 |
| US 20150293177 A1, 15.10.2015 | |||
| US 20160282416 A1, 29.09.2016 | |||
| WO 2012133066 A1, 04.10.2012. | |||

