Известны электромеханические приводы, обеспечивающие одновременное вращение двух валов с разными скоростями.
Цель изобретения - повышение наделсности и долговечности и упрощение конструкции.
Это достигается тем, что привод выполнен из двух электродвигателей с двумя статорами и двумя вращающимися иа разных -валах роторами, один из которых имеет зубчатую поверхность с шагом, равным шагу полюсных зубцов статора,- и разделен немагнитными вставками в соответствии с числом полюсов статора на ряд секторов, имеющих магнитопроводы, образующие статор второго двигателя, внутри которого размещен второй ротор.
С целью повышения равномерности вращения второго ротора магнитопроводы первого ротора выполнены .из двух разделенных немагнитным слоем пакетов, взаимно повернутых вокруг оси вращения так, что немагнитные участки одного пакета расположены против центров секторов другого.
Кроме того, магнитная система статора второго электродвигателя выполнена с произБОЛЬНО расположенной в пространстве осью.
магнитным слоем пакетов; на фиг. 3 - конструктивная схема привода, у которого магнитная система статора второго электродвигателя выполнена с произвольно расположенной в пространстве осью.
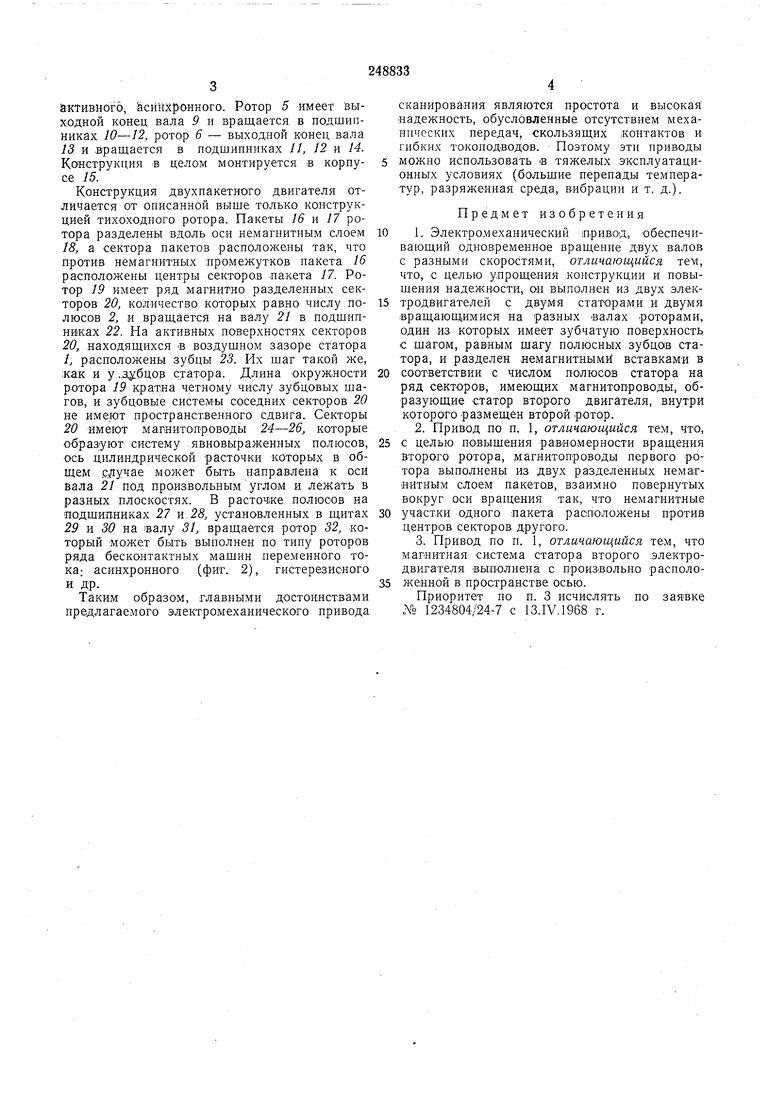
Привод имеет статор /, выполненный по ти,пу статоров шаговых двигателей. Количество конструктивных ПОЛЮСОВ 2 и катушек 3 обмотки якоря равно или кратно числу фаз напряжения питания (на фиг. 1 показана трехфазная обмотка). На активных поверхностях полюсов 2 имеются зубцы 4, шаг которых в электрических градусах равен полюсному делению двигателя. Пространственный сдвиг между зубцами соседних полюсов соответствует фазовому сдвигу напряжений (на фиг. 1- 120 эл. град.). Электродвигатель имеет два концентрически расположенных ротора 5 и 6. Тихоходный ротор 5 разделен немагнитными промежутками 7 на ряд одинаковых зубчатых магнитомягких секторов, количество которых равно числу полюсов 2. Шаг зубцов 8 ротора равен шагу зубцов 4 статора, а длина окружности активной поверхности ротора 5, обращенной к статору /, кратна шагу зубцов 8. Активная поверхность каждого сектора тихоходного ротора 5, обращенная к быстроходному ротору 6, выполняется гладкой. Ротор 6 может выполняться по типу роторов ряда двигателей переменного тока; гистерезисного, ре;активного, Асинхронного. Ротор 5 имеет выходной конец вала 9 и вращается в подшипниках 10-12, ротор 6 - выходной конец вала 13 и вращается в подшипниках //; 12 и 14. Конструкция в целом монтируется в корпусе 15.
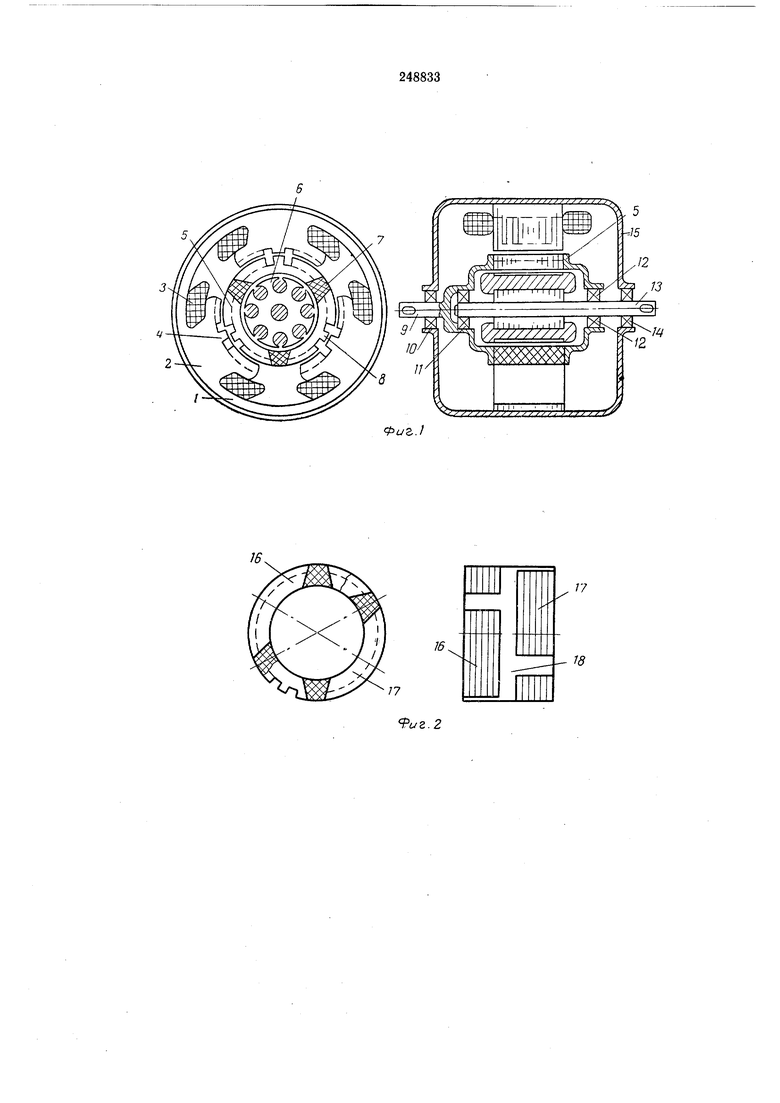
Конструкция двухпакетного двигателя отличается от описанной выше только конструкцией тихоходного ротора. Пакеты 16 и 17 ротора разделены вдоль оси немагнитным слоем 18, а сектора пакетов расположены так, что против немагнитных промежутков пакета 16 расположены центры секторов пакета 17. Ротор 19 имеет ряд магнитно разделенных секторов 20, количество которых равно числу полюсов 2, и вращается на валу 21 в подшипниках 22. На активных поверхностях секторов 20, находящихся в воздушном зазоре статора 1, расположены зубцы 23. Их шаг такой же, :как и у ..зубцов .статора. Длина окружности ротора 19 крат-,на четному числу зубцовых шагов, и зубцовые системы соседних секторов 20 не имеют пространственного сдвига. Секторы 20 имеют магнитопроводы 24-26, которые Образуют систему явновыраженных полюсов, ось цилиндрической расточки которых в общем c,Iyчae может быть направлена к оси вала 21 под произвольным углом и лежать s разных плоскостях. В расточ;ке полюсов на подшипниках 27 т 28, установленных в щитах 29 и 30 на валу 31, вращается ротор 32, который может быть выполнен по типу роторов ряда бесконтактных машин переменного тока; асинхронного (фиг. 2), гистерезисного и др.
Таким образом, главными достоинствами предлагаемого электромеханического привода
сканирования являются простота и высокая надежность, обусловленные отсутствием механических передач, скользящих контактов и гибких токоподводов. Поэтому эти приводы можно использовать в тяжелых эксплуатационных условиях (большие перепады температур, разряженная среда, впбрации и т. д.).
Предмет изобретения
1. Электро.механический привод, обеспечивающий одновременное вращение двух валов с разными скоростями, отличающийся тем, что, с целью упрощения конструкции и повышения надел ности, он выполнен из двух электродвигателей с двумя статорами и двумя вращающимися на разных валах роторами, один из которых имеет зубчатую поверхность с шагом, раВНым щагу полюсных зубцов статора, и разделен немагнитными вставками в
соответствии с числом полюсов статора на ряд секторов, имеющих магнитопроводы, образующие статор второго двигателя, внутри которого размещен второй ротор.
2.Привод по п. 1, отличающийся тем, что, с целью повышения равномерности вращения
второго ротора, магнитопроводы первого ротора выполнены из двух разделенных немагнитным слоем пакетов, взаимно повернутых вокруг оси вращения так, что немагнитные участки одного пакета расположены против центров секторов другого.
3.Привод по п. 1, отличающийся тем, что магнитная система статора второго электродвигателя выполнена с произвольно расположенной в пространстве осью.
Приоритет по п. 3 исчислять по зая-вке № 1234804/24-7 с 13.IV.1968 г.
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2544836C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
| Синхронный редукторный электродвигатель | 1990 |
|
SU1711299A1 |
| Трехфазный асинхронный редукторный электродвигатель | 1988 |
|
SU1751835A1 |
| Асинхронный редукторный электродвигатель | 1986 |
|
SU1753548A1 |
| Синхронный редукторный электродвигатель | 1989 |
|
SU1713077A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2629003C2 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| Электромагнитный редуктор | 2019 |
|
RU2717820C1 |

17
J6.
18
гч
JO
Риг.З
