Предлагаемое изобретение относится к испытательной технике, конкретно - к оборудованию для высокоскоростных трековых испытаний, и может быть использовано для разгона объектов испытаний на ракетном треке.
Трековые испытания различных объектов заключаются в изучении их поведения при высоких скоростях движения, получаемых с помощью ракетных кареток. Объект испытаний устанавливается на каретке ракетного трека, разгоняется с ее помощью до заданной скорости, затем при резком торможении каретки осуществляется его отстыковка от каретки, и дальнейшее самостоятельное перемещение в заданном направлении.
В некоторых случаях перед отстыковкой объекта испытаний от ракетной каретки необходимо не только достичь заданной скорости, но и обеспечить соблюдение установившегося скоростного режима в течении заданного интервала времени (на заданном отрезке пути), т.е. определенным образом стабилизировать скорость перемещения каретки по треку.
В ряде конструкций ракетных кареток для оказания влияния на скоростные факторы движения используются конструктивные элементы, обладающие определенными аэродинамическими характеристиками.
Например, в конструкции ракетной каретки /1/ использованы аэродинамические щитки, - система крыльев с положительным углом атаки. Щитки создают подъемную силу и тем самым разгружают башмаки каретки при движении, что способствует уменьшению силы трения башмаков о рельсовые направляющие трека.
Положительным эффектом данного конструкторского решения является возможность увеличения скорости движения каретки без изменения энергетики ее двигателя и длины рельсовых направляющих трека. Но с другой стороны, при достижении высоких значений скоростей, превышающих 3М сопутствующая большая подъемная сила крыльев, уменьшающая вес каретки, может служить причиной быстрого износа нижних тормозных колодок или направляющих элементов башмаков, увеличению зазоров в системе «башмак - рельс», и как следствие к аварийному сходу каретки с направляющих. Еще одним недостатком здесь является жесткое крепление крыльев с постоянным углом атаки, отсутствие элементов их механизации, и таким образом невозможность регулирования подъемной силы и скорости движения каретки.
Наиболее близкой к предлагаемому изобретению по технической сущности (по конструкции) и достигаемому результату является ракетная каретка /2/, содержащая несущую платформу, установленную на опорно-направляющие башмаки с элементами тормозной системы, расположенные на ней ложементы для установки испытываемого изделия и ракетного двигателя, и систему антикрыльев.
Использование антикрыльев позволяет данной конструкции обеспечить устойчивое движение каретки без схода с направляющих при высоких скоростях движения (Μ ~ 6). Однако, такие недостатки как жесткое крепление системы антикрыльев, отсутствие элементов их механизации, и, как следствие, принципиальная невозможность регулирования скорости движения в ней не устранены.
Технической задачей предлагаемого изобретения является обеспечение стабилизации и поддержание постоянной скорости движения рельсовых ракетных кареток в течение заданного времени (на заданной дистанции перемещения).
Решение поставленной задачи достигается тем, что в известной ракетной каретке, содержащей несущую платформу, установленную на опорно-направляющие башмаки с элементами тормозной системы, расположенные на ней ложементы для установки испытываемого изделия и ракетного двигателя, и антикрыло (систему антикрыльев), в соответствии с изобретением ложемент для установки ракетного двигателя выполнен с возможностью регулируемого поворота относительно горизонтальной оси, перпендикулярной направлению движения каретки, а антикрыло - с возможностью регулирования угла атаки, а также вертикального плоскопараллельного перемещения относительно платформы и снабжено элементами управления поворотом ложемента ракетного двигателя.
Необходимость и достаточность вышеуказанных отличительных признаков предложенного технического решения может быть пояснена следующим образом.
Если на разгонном участке трека движение каретки описывается зависимостью:

то на участке равномерного движения с заданной скоростью перемещения необходимо соблюдение условия:

где:
FТ - сила тяги разгонного двигателя (двигателей), Н;
 - сила трения каретки о рельсы, Н;
- сила трения каретки о рельсы, Н;
FВН - сила сопротивления обусловленная встречным ветровым напором, Н;
МΣ - суммарная масса системы «каретка + двигатели + металлоконструкция + объект испытаний» в текущий момент времени, кг;
а - ускорение, м/с2.
С учетом того, что величины и FВН зависят от различных внешних факторов, выражение (2) может быть приведено к виду:
и FВН зависят от различных внешних факторов, выражение (2) может быть приведено к виду:

где  - коэффициент трения опорных элементов каретки о рельсы;
- коэффициент трения опорных элементов каретки о рельсы;
g - ускорение силы тяжести, равное 9,81 м/с2;
ρ - плотность воздуха, кг/м3;
j - 1, 2, …, k - условный порядковый номер элемента металлоконструкции каретки;
SMj - площадь миделевого сечения j -го элемента металлоконструкции каретки;
V - текущая скорость каретки, м/с;
CXj - аэродинамический коэффициент силы лобового сопротивления j -го элемента металлоконструкции.
Выполнение ложемента для установки ракетного двигателя с возможностью регулируемого поворота относительно горизонтальной оси, перпендикулярной направлению движения каретки, позволит путем его поворота совместно с двигателем изменить направление вектора тяги. Если в обычных условиях вектор силы тяги двигателя имеет горизонтальное направление, то при повороте двигателя наряду с горизонтальной его составляющей появится и вертикальная:

где  - соответственно горизонтальная и вертикальная составляющая вектора силы тяги, в скалярной форме соответственно равные:
- соответственно горизонтальная и вертикальная составляющая вектора силы тяги, в скалярной форме соответственно равные:

где α угол наклона оси двигателя к горизонтали.
При этом составляющая FТГ будет обеспечивать движение каретки, а FTB увеличивать ее вес.
При наличии в конструкции каретки антикрыла (системы антикрыльев), при его взаимодействии с набегающим потоком воздуха появляется прижимающая сила, также увеличивающая вес каретки:

где Cγ - безразмерный коэффициент подъемной силы крыла;
SK - площадь крыла в плане, м2.
И тогда зависимость (3) приводится к виду:

Откуда следует, что при прочих неизменных факторах, в случае постоянного угла атаки антикрыла и соответствующем аэродинамическом его качестве, для каждого значения текущей массы каретки существует такой угол наклона α к горизонтальной оси вектора тяги ракетного двигателя, при котором скорость перемещения каретки по треку будет равномерной.
Величина же этого угла может быть определена из системы уравнений, получаемой путем несложных преобразований зависимости (7):

Возможность регулирования угла атаки антикрыла, например путем его поворота относительно горизонтальной оси, перпендикулярной направлению движения каретки, обеспечивает его управляемость и выполнимость осуществления предварительной установки, исходя из условия получения прижимающей силы FП заданной величины при достижении необходимой скорости V.
Также для этой цели антикрыло может быть снабжено элементами механизации, - предкрылками, закрылками и т.п. (по аналогии с крыльями авиатехники).
Выполнение антикрыла с возможностью вертикального плоскопараллельного перемещения относительно несущей платформы и снабжение его элементами управления поворотом ложемента ракетного двигателя позволит:
- во-первых, обеспечить неизменность аэродинамического качества крыла при его перемещении относительно каретки, - прижимающая сила будет определяться, при прочих неизменных факторах, только скоростью набегающего ветрового потока;
- во-вторых, вследствие этого перемещения, например в случае использования рычажной системы управления, воздействовать силой FП на плечо рычага, связанного с ложементом, осуществлять его поворот вместе с ракетным двигателем и тем самым изменять величину вектора тяги в горизонтальном направлении FTГ, обеспечивающего движение каретки.
Целесообразно, чтобы элементы металлоконструкции ракетной каретки, с несомым ею двигателем и объектом испытаний (изделием), а также антикрыло, были скомпонованы на опорной платформе таким образом, чтобы вектора силы тяжести МΣ⋅g, прижимающей силы FП и вертикальной составляющей вектора тяги FTГ располагались максимально близко к одной прямой, для обеспечения равномерной нагрузки на опорно-направляющие башмаки с элементами тормозной системы.
Конструкция устройства поясняется следующей графической информацией:
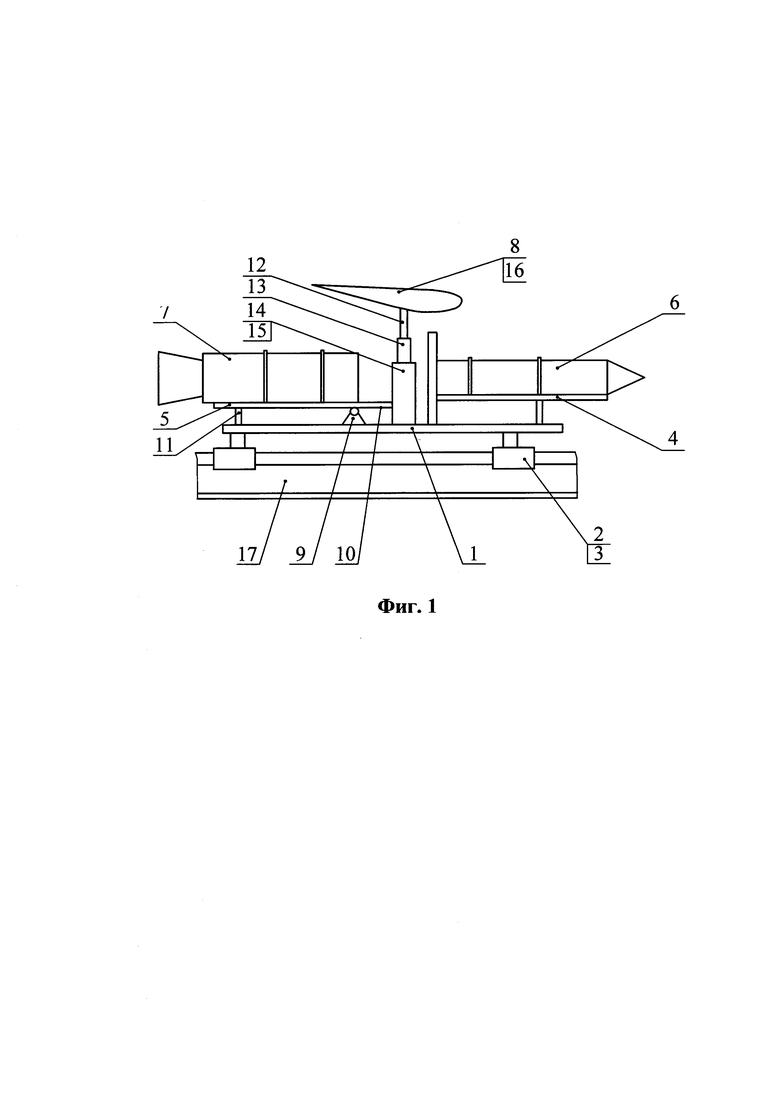
На фиг. 1 схематично представлен вид сбоку ракетной каретки с испытываемым изделием - объектом испытаний.
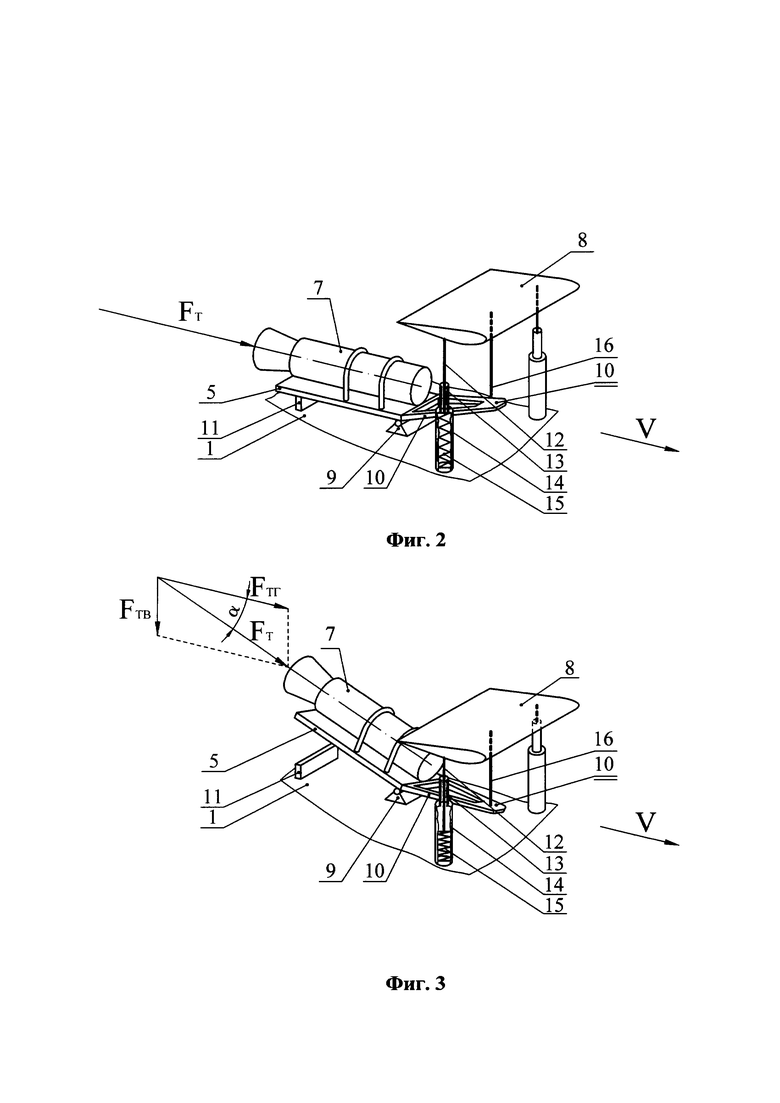
На фиг. 2 также схематично представлен вариант размещения антикрыла и ракетного двигателя с сопутствующими устройствами системы управления на опорной платформе каретки в предстартовой позиции.
На фиг. 3 - представлена схема взаимодействия антикрыла с элементами управления поворотом ложемента ракетного двигателя при движении каретки.
Стрелками с соответствующими буквенными обозначениями на иллюстрациях показаны скорость (направление движения ракетной каретки), а также направление составляющих вектора тяги ракетного двигателя.
Для упрощения изображения конструкция элементов привода и управления системой торможения, конструкция тормозных элементов каретки на иллюстрациях условно не показаны.
Каретка (фиг. 1) содержит несущую платформу 1, установленную на опорно-направляющие башмаки 2 с элементами тормозной системы 3, расположенные на ней ложементы 4, 5 для установки испытываемого изделия 6 и ракетного двигателя 7, и антикрыло 8.
Ложемент 5 для установки ракетного двигателя 7 передней частью установлен на шарнирную опору 9, обеспечивающую возможность его поворота относительно горизонтальной оси, и соединен с рычагом управления поворотом ложемента 10. Задняя часть ложемента опирается, с возможностью расстыковки, на неподвижную опору 11.
Антикрыло 8 (фиг. 2, 3) для обеспечения возможности вертикального плоскопараллельного перемещения относительно платформы на двух вертикальных стойках 12, проходящих сквозь направляющие втулки 13 полых опор 14, и опирающиеся на размещенные в полостях опор упругие элементы 15. Для регулирования угла атаки крепления антикрыла 8 к стойкам 12 выполнены шарнирными с возможностью фиксации угла поворота (на иллюстрациях для упрощения изображений условно не показано).
Антикрыло 8 снабжено штоком-толкателем 16, взаимодействующим в определенных условиях (при превышении кареткой заданной скорости V) с рычагом 10 управления поворотом ложемента 5, с закрепленным на нем двигателем 7.
Опорно-направляющие башмаки 2 с элементами тормозной системы 3 установлены на рельсовые направляющие 17.
Работа устройства осуществляется следующим образом.
Несущая платформа каретки 1 с антикрылом 8 с сопутствующими устройствами 12... 16 с помощью опорно-направляющих башмаков 2 с элементами тормозной системы 3 устанавливается на рельсовые направляющие 17.
Антикрыло 8 устанавливается под заданным углом атаки (в случае механизированного крыла - в необходимые позиции устанавливаются предкрылки, закрылки...), обеспечивающим при достижении заданной скорости V, получения прижимной силы FП, и вызванного ей перемещения штока-толкателя 16 - X, необходимого для осуществления воздействия с рычагом управления поворотом ложемента 10, с закрепленным на нем двигателем 7.
На ложементах 4, 5 закрепляются испытываемый объект (изделие) 6 и ракетный двигатель 7.
При запуске ракетного двигателя 7 каретка начинает ускоренное движение. Набегающий при этом на нее ветровой поток воздействует на антикрыло 8 и «генерирует» прижимающую силу FП величина которой, как выше показано, пропорциональна, при прочих неизменных условиях, квадрату скорости V.
Под действием силы FП антикрыло 8 совершает вертикальное плоскопараллельное перемещение вниз в направлении опорной платформы 1. Стойки 12 антикрыла, двигаясь сквозь направляющие втулки 13 полых опор 14, опираются на размещенные в них упругие элементы 15, сжимают их, и таким образом усилие FП передается на платформу 1 в дополнение к весу и позволяет частично компенсировать потерю массы двигателя 7 по мере выгорания топлива, и соответствующее приращение скорости каретки, т.е. ее ускорение.
Усилие сжатия упругих элементов 15, равное FП и передаваемое на платформу может быть определено как:

где k - суммарная жесткость упругих элементов, Н/м;
X - линейная деформация (изменение длины) упругого элемента, м.
Таким образом, между линейной деформацией упругих элементов в опорах, равной величине перемещения крыла по вертикали, и текущей скоростью каретки имеется зависимость:

Шток 16, соединенный с антикрылом 8, выполнен с возможностью регулирования длины. Для конкретных испытаний его длина устанавливается таким образом, чтобы при достижении кареткой заданной скорости V, и соответствующего перемещения антикрыла на величину X, торец штока приходил в соприкосновение с рычагом управления поворотом ложемента 10.
При превышении кареткой заданной величины скорости V соответственно увеличиваются как величина прижимающей силы FП, так и вызванного ей линейного перемещения X антикрыла 8 совместно со штоком 16. При этом шток 16 начинает взаимодействие с рычагом 10.
Торец штока 16 давит на рычаг 10 управления поворотом ложемента. Ложемент 5 совместно с закрепленным на нем двигателем 7, будучи соединен с рычагом 10, поворачивается на шарнирной опоре 9 (с расстыковкой от задней неподвижной опоры 11) на некоторый угол α, и таким образом вектор силы тяги двигателя  меняет направление от исходного горизонтального в направлении движения каретки на наклонное, с «образованием» составляющих
меняет направление от исходного горизонтального в направлении движения каретки на наклонное, с «образованием» составляющих  (фиг. 3).
(фиг. 3).
При этом горизонтальная составляющая вектора тяги  численная величина которой равна FT⋅cosα, и естественно меньше исходной FT, обеспечивает движение каретки, а вертикальная составляющая
численная величина которой равна FT⋅cosα, и естественно меньше исходной FT, обеспечивает движение каретки, а вертикальная составляющая  величиной FT⋅sinα, увеличивает ее вес, а в итоге силу трения, препятствующую движению. В силу данных причин каретка вынужденно замедляется, т.е. уменьшается величина ее скорости V, а одновременно и действующей на антикрыло прижимающей силы FП.
величиной FT⋅sinα, увеличивает ее вес, а в итоге силу трения, препятствующую движению. В силу данных причин каретка вынужденно замедляется, т.е. уменьшается величина ее скорости V, а одновременно и действующей на антикрыло прижимающей силы FП.
По мере замедления каретки, антикрыло 8 совместно со штоком 16 под действием упругих элементов 15 поднимается вверх относительно несущей платформы 1, без потери механического контакта с рычагом 10, который под действием силы тяжести связанного с ним ложемента 5 с двигателем 7 совершает «обратный» поворот на шарнирной опоре 9. Процесс этот осуществляется до установления режима движения каретки с заданной скоростью.
В случае следующего непреднамеренного разгона, вышеописанный процесс взаимодействия антикрыла с элементами управления поворотом ложемента ракетного двигателя повторяется.
Предлагаемая конструкция, таким образом, обеспечивает надежное и безопасное регулирование тяговых характеристик ракетного двигателя при превышении заданной скорости движения, следствием чего является стабилизация и возможность поддержания постоянной скорости движения рельсовых ракетных кареток в течение заданного времени (или на заданной дистанции перемещения).
Источники информации, принятые во внимание при оформлении заявки:
1) Патент РФ №2244910, G01M 7/08, Стенд для ударных испытаний, 2005 г.
2) D.J. Rigali, L.V. Feltz «High-Speed Monorail Rocket Sleds for Aerody-namic Testing at High Reynolds Numbers», Journal of Spacecraft and Rockets, 1968 г., T. 5, №11, стр. 1341-1346. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ракетная каретка с управляемым торможением | 2020 |
|
RU2739537C1 |
| Баллистический маятник с переменным весом | 2019 |
|
RU2699756C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОНОРЕЛЬСОВОЙ РАКЕТНОЙ ТЕЛЕЖКИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2532212C1 |
| Лоток для торможения разгонных кареток | 2019 |
|
RU2710870C1 |
| Тормозная колодка для башмаков ракетных кареток | 2022 |
|
RU2778587C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОНОРЕЛЬСОВОЙ РАКЕТНОЙ ТЕЛЕЖКИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2502934C1 |
| ГИБРИДНАЯ БАЛЛИСТИЧНО-КРЫЛАТАЯ РАКЕТА | 2008 |
|
RU2383851C1 |
| СПОСОБ РАЗГОНА ОБЪЕКТА ИСПЫТАНИЙ РЕАКТИВНЫМ АППАРАТОМ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369853C1 |
| Способ испытаний парашютных систем и стенд для его осуществления | 2017 |
|
RU2654885C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ НА ОКОЛОЗЕМНУЮ ОРБИТУ И МНОГОРАЗОВЫЙ СОСТАВНОЙ АЭРОКОСМИЧЕСКИЙ РАКЕТНЫЙ САМОЛЕТ-НОСИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (АЭРОКОСМИЧЕСКАЯ СИСТЕМА " НУР-САИД") | 2001 |
|
RU2232700C2 |
Изобретение относится к испытательной технике, конкретно к оборудованию для высокоскоростных трековых испытаний, и может быть использовано для разгона объектов испытаний на ракетном треке. Ракетная каретка содержит несущую платформу, установленную на пилонах, опирающихся на опорно-направляющие башмаки, расположенные на ней ложементы для установки испытываемого изделия и ракетного двигателя, элементы тормозной системы и антикрыло. Ложемент для установки ракетного двигателя выполнен с возможностью регулируемого поворота относительно горизонтальной оси, перпендикулярной направлению движения каретки, а антикрыло - с возможностью регулирования угла атаки, а также вертикального плоскопараллельного перемещения относительно платформы и снабжено элементами управления поворотом ложемента ракетного двигателя. Антикрыло может быть снабжено элементами механизации. Изобретение позволяет обеспечить стабилизацию и поддержание постоянной скорости движения рельсовых ракетных кареток на заданной дистанции перемещения. 1 з.п. ф-лы, 3 ил.
1. Ракетная каретка, содержащая несущую платформу, установленную на пилонах, опирающихся на опорно-направляющие башмаки, расположенные на ней ложементы для установки испытываемого изделия и ракетного двигателя, элементы тормозной системы и антикрыло, отличающаяся тем, что ложемент для установки ракетного двигателя выполнен с возможностью регулируемого поворота относительно горизонтальной оси, перпендикулярной направлению движения каретки, а антикрыло - с возможностью регулирования угла атаки, а также вертикального плоскопараллельного перемещения относительно платформы и снабжено элементами управления поворотом ложемента ракетного двигателя.
2. Ракетная каретка по п. 1, отличающаяся тем, что антикрыло снабжено элементами механизации.
| СТЕНД ДЛЯ УДАРНЫХ ИСПЫТАНИЙ | 2003 |
|
RU2244910C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОНОРЕЛЬСОВОЙ РАКЕТНОЙ ТЕЛЕЖКИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2532212C1 |
| СПОСОБ ИСПЫТАНИЙ СНАРЯДОВ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2587614C1 |
| Устройство для отделения пней от торфяной залежи | 1949 |
|
SU85650A1 |
| DE 102018004549 B3, 31.10.2019 | |||
| CN 108827588 A, 16.11.2018. | |||

