Изобретение относится к испытательной технике и может быть использовано для исследования объектов на ракетном треке.
Проблема таких испытаний заключается в достижении максимально возможных скоростей разгона объектов испытаний (ОИ). Для этого энергетически выгодно использовать монорельсовые ракетные поезда из нескольких ракетных тележек (РТ), так как, по сравнению с двухрельсовыми поездами, за счет уменьшения количества опорных башмаков уменьшаются масса ракетных тележек и их мидель (следовательно, и аэродинамическое сопротивление).
Известен способ стабилизации монорельсовой ракетной тележки, выбранный в качестве прототипа для вариантов заявляемого способа, включающий установку с отрицательным углом атаки крыльев на противоположных боковых поверхностях ее стабилизирующего устройства в виде башмака, размещенного на рельсовой направляющей (РН), ограничение увеличения крена РТ после выбора технологических зазоров между башмаком и головкой РН силами опорных реакций (см. «Высокоскоростные монорельсовые ракетные тележки для аэродинамических испытаний при больших числах Рейнольдса», перевод ВИНИТИ №81087/0, 1970 г., D.J. Rigali, L.V. Feltz «High-Speed Monorail Rocket Sleds for Aerodynamic Testing at High Reynolds Numbers», Journal of Spacecraft and Rockets, 1968 г., т.5, №11, стр.1341-1346).
Известно устройство стабилизации монорельсовой РТ, выбранное в качестве прототипа для вариантов заявляемого устройства, содержащее, по крайней мере, один жестко связанный с РТ башмак, охватывающий головку РН с возможностью перемещения вдоль нее. На боковых поверхностях башмака жестко закреплены два крыла с отрицательным углом атаки. Крылья расположены симметрично относительно вертикальной плоскости, проходящей через продольную ось башмака (см. «Высокоскоростные монорельсовые ракетные тележки для аэродинамических испытаний при больших числах Рейнольдса», перевод ВИНИТИ №81087/0, 1970 г., D.J. Rigali, L.V. Feltz «High-Speed Monorail Rocket Sleds for Aerodynamic Testing at High Reynolds Numbers», Journal of Spacecraft and Rockets, 1968 г., т.5, №11, стр.1341-1346).
Недостатком известных способа и устройства стабилизации монорельсовой РТ является следующее. Как показала практика, при высоких скоростях РТ (за время не более 0,2 с до конца движения РТ по ракетному треку) происходит прогрессирующее увеличение поперечного крена РТ в пределах увеличивающегося зазора между башмаком и РН за счет износа поверхностей башмака, сопрягающихся с головкой РН. Рост крена приводит к линейному контакту и интенсификации износа башмака в местах линейного контакта с РН. Это, в итоге, приводит к значительному отклонению ОИ от заданного направления движения или к разрушению башмака и аварийному сходу РТ с РН. Отсутствует возможность влиять на крен в ходе движения РТ. Для обеспечения требуемой точности доставки ОИ и исключения аварий необходимо снижать скорость разгона ОИ.
Задачей предлагаемого изобретения является создание способа стабилизации монорельсовой РТ и устройства для его осуществления, обеспечивающих разгон ОИ на всей длине разгонного участка без увеличения крена.
Технический результат: устранение крена монорельсовой РТ, повышение скорости разгона и точности доставки ОИ.
Поставленная задача решается тем, что по первому варианту заявляемого способа стабилизации монорельсовой РТ ракетного трека путем устранения ее крена, включающему установку крыла на наружную поверхность ракетной тележки, в отличие от прототипа крыло устанавливают на верхней поверхности РТ в вертикальной плоскости, проходящей через продольную ось РТ, при этом в ходе движения РТ по РН крен РТ устраняют соответствующим изменением угла атаки крыла, за счет восстанавливающего момента возникающих при этом аэродинамических сил.
Поставленная задача решается также тем, что по первому варианту заявляемое стабилизирующее устройство монорельсовой РТ ракетного трека, содержащее крыло, установленное на наружной поверхности РТ, в отличие от прототипа снабжено устройством определения крена РТ, выполненным с возможностью передачи сигнала на установленное на РТ устройство вращения крыла, крыло выполнено в виде пластины, заостренной спереди по ходу движения РТ, и закреплено на ее верхней поверхности в вертикальной плоскости, проходящей через продольную ось РТ с возможностью вращения при помощи вала, установленного в корпус РТ, перпендикулярно направлению движения РТ.
Стабилизирующее устройство может быть снабжено установленным на РТ устройством управления устройством вращения крыла, соединенным электрической связью с устройством определения крена и устройством вращения крыла, при этом устройство определения крена РТ выполнено с возможностью передачи сигнала на устройство вращения крыла через устройство управления устройством вращения крыла, устройство определения крена РТ и устройство управления устройством вращения крыла снабжены установленным на РТ источником питания.
Устройство вращения крыла может быть выполнено в виде шагового двигателя (ШД), при этом вал ШД механической связью соединен с валом крыла.
Устройство вращения крыла может быть выполнено также в виде по крайней мере двух пиротолкателей, содержащих цилиндры с размещенными в них поршнями со штоками и пороховыми зарядами, систему поджига пороховых зарядов пиротолкателей, а также двуплечего рычага, жестко закрепленного на валу крыла, при этом пиротолкатели установлены с возможностью взаимодействия концов их штоков с концами двуплечего рычага.
Устройство управления устройством вращения крыла может быть выполнено управляющим системой поджига порохового заряда пиротолкателей, при этом система поджига порохового заряда пиротолкателей выполнена в виде пиропатрона, электрически связанного с устройством управления устройством вращения крыла.
Устройство определения крена РТ может быть установлено на РТ и выполнено содержащим гироскоп.
Устройство определения крена РТ может быть выполнено содержащим по крайней мере два контактных датчика, закрепленных симметрично относительно вертикальной плоскости, проходящей через продольную ось РТ, на заднем по ходу движения РТ торце башмака с помощью колодки, выполненной из теплоизоляционного материала, менее износостойкого чем материал башмака, чувствительные элементы датчиков расположены над поверхностью головки РН на расстоянии, меньшем величины допустимого износа в поперечном направлении контактирующей с ней поверхности башмака.
Система поджига порохового заряда пиротолкателей может быть выполнена в виде запального порохового заряда, размещенного в цилиндре пиротолкателя и металлической трубки, заполненной взрывчатым веществом (ВВ), один конец трубки размещен в запальном пороховом заряде, отделенном от порохового заряда обратным клапаном, а другой закреплен на одной из боковых поверхностей РТ при помощи легкоразрушаемого обтекателя, при этом устройство определения крена РТ выполнено содержащим ударники, размещенные на ракетном треке по ходу движения РТ с двух сторон от рельсовой направляющей с заданным шагом с возможностью их взаимодействия с другим концом металлической трубки при заданной величине крена РТ.
Поставленная задача решается также тем, что по второму варианту заявляемого способа стабилизации монорельсовой РТ ракетного трека путем устранения ее крена, в отличие от прототипа на ракетной тележке устанавливают по крайней мере одну пару ракетных двигателей (РД), векторы тяги которых направлены в противоположные стороны перпендикулярно вертикальной плоскости, проходящей через продольную ось РТ, при этом в ходе движения крен РТ устраняют за счет восстанавливающего момента реактивных сил, создаваемых работающим РД, вектор тяги которого направлен в сторону, противоположную крену РТ.
Поставленная задача решается также тем, что по второму варианту в заявляемом стабилизирующем устройстве монорельсовой РТ ракетного трека, в отличие от прототипа на ракетной тележке дополнительно установлена по крайней мере одна пара РД, векторы тяги которых направлены в противоположные стороны перпендикулярно вертикальной плоскости, проходящей через продольную ось РТ, система поджига порохового заряда РД и устройство определения крена РТ, выполненное с возможностью передачи сигнала на систему поджига РД.
Стабилизирующее устройство может быть снабжено установленным на РТ устройством управления системой поджига порохового заряда РД, система поджига выполнена в виде пиропатрона, устройство определения крена РТ выполнено с возможностью передачи сигнала на систему поджига РД через устройство управления системой поджига порохового заряда РД, при этом устройство определения крена и устройство управления системой поджига порохового заряда РД снабжены установленным на РТ источником питания.
Устройство определения крена РТ может быть выполнено содержащим гироскоп и установлено на РТ.
Устройство определения крена РТ может быть выполнено также содержащим по крайней мере два контактных датчика, закрепленных симметрично относительно вертикальной плоскости, проходящей через продольную ось РТ, на заднем по ходу движения РТ торце башмака с помощью колодки, выполненной из теплоизоляционного материала, менее износостойкого, чем материал башмака, чувствительные элементы датчиков расположены над поверхностью головки РН на расстоянии, меньшем величины допустимого износа в поперечном направлении контактирующей с ней поверхности башмака.
Система поджига порохового заряда РД может быть выполнена в виде запального порохового заряда, размещенного в РД и металлической трубки, заполненной ВВ, один конец трубки размещен в запальном пороховом заряде, отделенном от порохового заряда обратным клапаном, а другой закреплен на одной из боковых поверхностей РТ при помощи легкоразрушаемого обтекателя, устройство определения крена РТ при этом содержит ударники, размещенные на ракетном треке по ходу движения РТ с двух сторон от рельсовой направляющей с заданным шагом с возможностью их взаимодействия с другим концом металлической трубки при заданной величине крена РТ.
Установка крыла на верхнюю поверхность РТ в вертикальной плоскости, проходящей через продольную ось РТ, изменение при крене РТ в ходе ее движения по РН угла атаки крыла, приводит к появлению восстанавливающего момента возникающих при этом аэродинамических сил, который устраняет крен путем уменьшения крена до допустимых значений и, соответственно, позволяет разогнать ОИ до максимальной скорости, обусловленной тяговооруженностью РТ, и повысить точность доставки ОИ (первый вариант заявляемого способа).
Установка на верхней поверхности ракетной тележки крыла (первый вариант заявляемого устройства), выполненного в виде пластины, заостренной спереди по ходу движения РТ, и закрепленного в вертикальной плоскости, проходящей через продольную ось РТ с возможностью вращения при помощи вала, установленного в корпус РТ, перпендикулярно направлению движения РТ, снабжение устройством определения крена РТ, выполненным с возможностью передачи сигнала на установленное на РТ устройство вращения крыла, позволяет при появлении недопустимого крена определить его величину, подать сигнал на устройство вращения крыла и повернуть крыло на соответствующий угол атаки, что приводит к появлению восстанавливающего момента возникающих при этом аэродинамических сил, который устраняет крен путем его уменьшения до допустимых значений.
Снабжение стабилизирующего устройства монорельсовой РТ установленным на РТ устройством управления устройством вращения крыла, соединенным электрической связью с устройством определения крена и устройством вращения крыла, выполнение устройства определения крена РТ с возможностью передачи сигнала на устройство вращения крыла через устройство управления устройством вращения крыла, снабжение устройства определения крена РТ и устройства управления устройством вращения крыла установленным на РТ источником питания позволяет поворачивать крыло на требуемый угол в зависимости от величины крена.
Выполнение устройства вращения крыла в виде ШД и соединение вала ШД механической связью с валом крыла позволяет поворачивать крыло на требуемый угол по команде устройства управления устройством вращения крыла.
Выполнение устройства вращения крыла в виде по крайней мере двух пиротолкателей, содержащих цилиндры с размещенными в них поршнями со штоками и пороховыми зарядами, систему поджига пороховых зарядов пиротолкателей, а также двуплечего рычага, жестко закрепленного на валу крыла, установка пиротолкателей с возможностью взаимодействия концов их штоков с концами двуплечего рычага позволяет значительно увеличить скорость поворота крыла при меньших габаритно-весовых характеристиках устройства вращения крыла.
Выполнение устройства управления устройством вращения крыла, управляющим системой поджига порохового заряда пиротолкателей, выполненной в виде пиропатрона, связанного с устройством управления устройством вращения крыла, позволяет производить запуск пиротолкателей по команде устройства управления.
Установка на ракетной тележке по крайней мере одной пары РД, векторы тяги которых направлены в противоположные стороны перпендикулярно вертикальной плоскости, проходящей через продольную ось РТ, включение при крене РТ в ходе ее движения по РН РД, вектор тяги которого направлен в сторону, противоположную крену РТ, за счет восстанавливающего момента реактивных сил, создаваемых работающим РД, устраняет крен и, соответственно, позволяет разогнать ОИ до максимальной скорости, обусловленной тяговооруженностью РТ, и повысить точность доставки ОИ (второй вариант заявляемого способа).
Установка на РТ по крайней мере одной пары дополнительных РД, векторы тяги которых направлены в противоположные стороны перпендикулярно вертикальной плоскости, проходящей через продольную ось РТ, системы поджига порохового заряда РД и устройства определения крена РТ, выполненного с возможностью передачи сигнала на систему поджига РД, позволяет при появлении недопустимого крена определить его величину и подать сигнал на систему поджига порохового заряда РД, вектор тяги которого направлен в сторону, противоположную крену РТ, за счет восстанавливающего момента реактивных сил, создаваемых работающим РД, устранить крен (второй вариант заявляемого устройства).
Снабжение стабилизирующего устройства монорельсовой РТ установленным на РТ устройством управления системой поджига порохового заряда РД, выполнение системы поджига в виде пиропатрона, выполнение устройства определения крена РТ с возможностью передачи сигнала на систему поджига РД через устройство управления системой поджига порохового заряда РД, снабжение устройства определения крена и устройства управления системой поджига порохового заряда установленным на РТ источником питания позволяет запускать РД, тяга которого направлена в сторону, противоположную крену РТ.
Выполнение (первый и второй вариант заявляемого устройства) установленного на РТ устройства определения крена РТ содержащим гироскоп позволяет постоянно определять угол крена РТ, по значению которого производится управление устройством (поворот крыла или запуск РД), устраняющим крен РТ.
Выполнение (первый и второй вариант заявляемого устройства) устройства определения крена РТ содержащим по крайней мере, два контактных датчика, закрепленных симметрично относительно вертикальной плоскости, проходящей через продольную ось РТ, на заднем по ходу движения РТ торце башмака с помощью колодки, расположение чувствительных элементов датчиков над поверхностью головки РН на расстоянии, меньшем величины допустимого износа в поперечном направлении контактирующей с ней поверхности башмака, позволяет при износе, близком к допустимому, подать сигнал, по которому производится управление устройством (поворот крыла или запуск РД), устраняющим крен РТ.
Выполнение (первый и второй вариант заявляемого устройства) колодки для закрепления контактных датчиков из теплоизоляционного материала, менее износостойкого, чем материал башмака, исключает преждевременное срабатывание датчиков от тепловых потоков от нагретого башмака, а также влияние на износ контактирующей с РН поверхности башмака.
Выполнение системы поджига порохового заряда пиротолкателей (первый вариант заявляемого устройства) или порохового заряда РД (второй вариант заявляемого устройства) в виде запального порохового заряда и металлической трубки, заполненной ВВ, один конец которой размещен в запальном пороховом заряде, отделенном от порохового заряда обратным клапаном, а другой закреплен на одной из боковых поверхностей РТ при помощи легкоразрушаемого обтекателя, выполнение при этом устройства определения крена РТ содержащим ударники, размещенные на ракетном треке по ходу движения РТ с двух сторон от рельсовой направляющей с заданным шагом с возможностью взаимодействия их с другим концом металлической трубки при заданной величине крена РТ, дает возможность при превышении крена РТ допустимого значения запустить пиротолкатель или РД без использования электронных устройств и источников питания, что упрощает и повышает надежность заявляемых устройств.
Закрепление второго конца металлической трубки, заполненной ВВ, на одной из боковых поверхностей РТ при помощи легкоразрушаемого обтекателя позволяет повысить надежность инициирования ВВ в металлической трубке при соударении с упором, а так же снизить воздействие ударных нагрузок на РТ.
Изобретение поясняется чертежами:
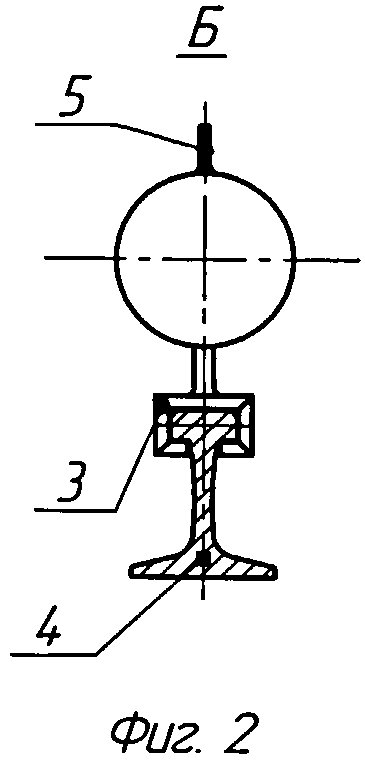
- на фиг.1 и 2 изображены виды сбоку и спереди первого варианта устройства;
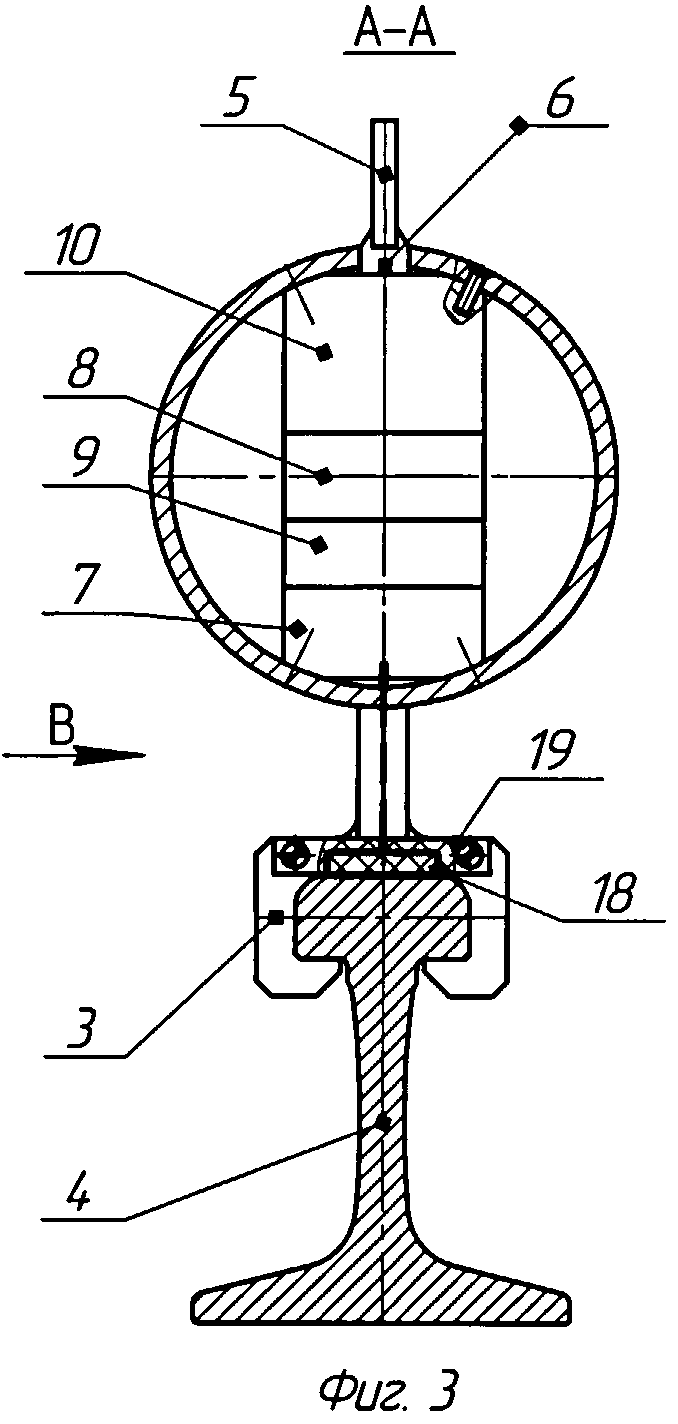
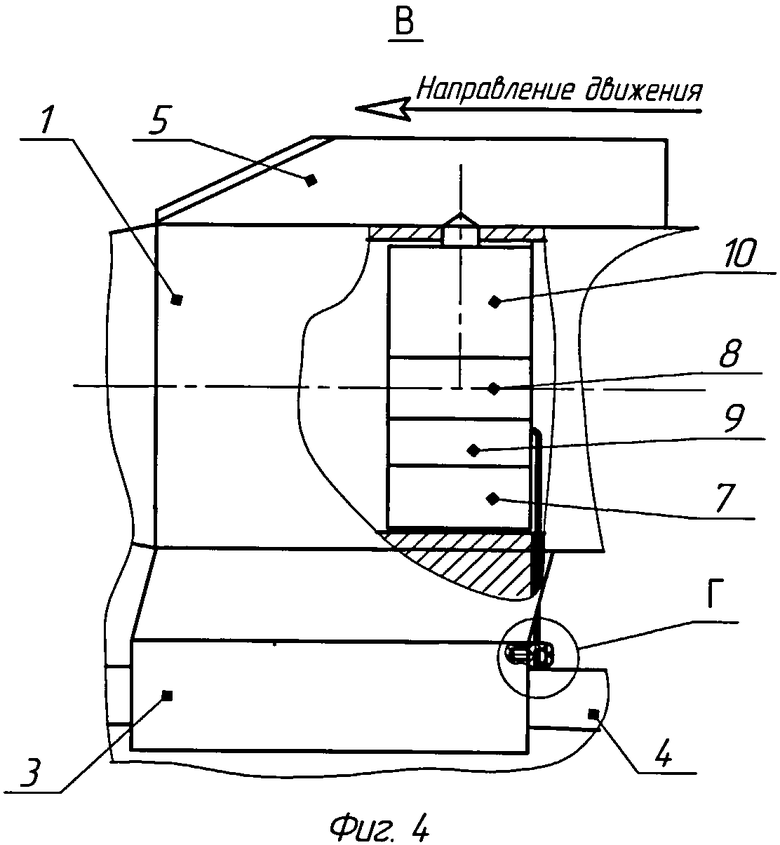
- на фиг.3 и 4 изображены поперечное сечение и вид сбоку первого варианта устройства с устройством вращения крыла в виде ШД и с устройством определения крена, содержащим контактные датчики;
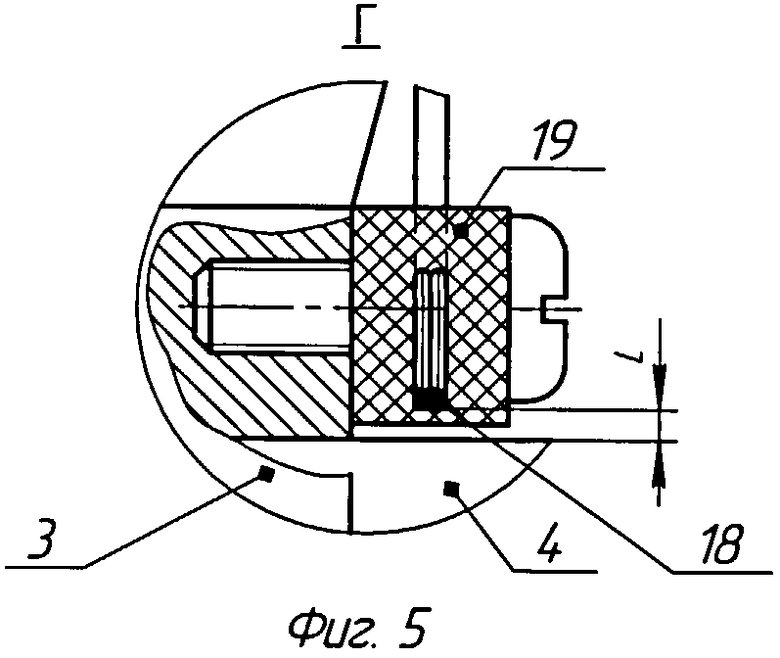
- на фиг.5 изображен увеличенный элемент вида сбоку контактного датчика устройства определения крена в первом и втором вариантах заявляемого устройства;
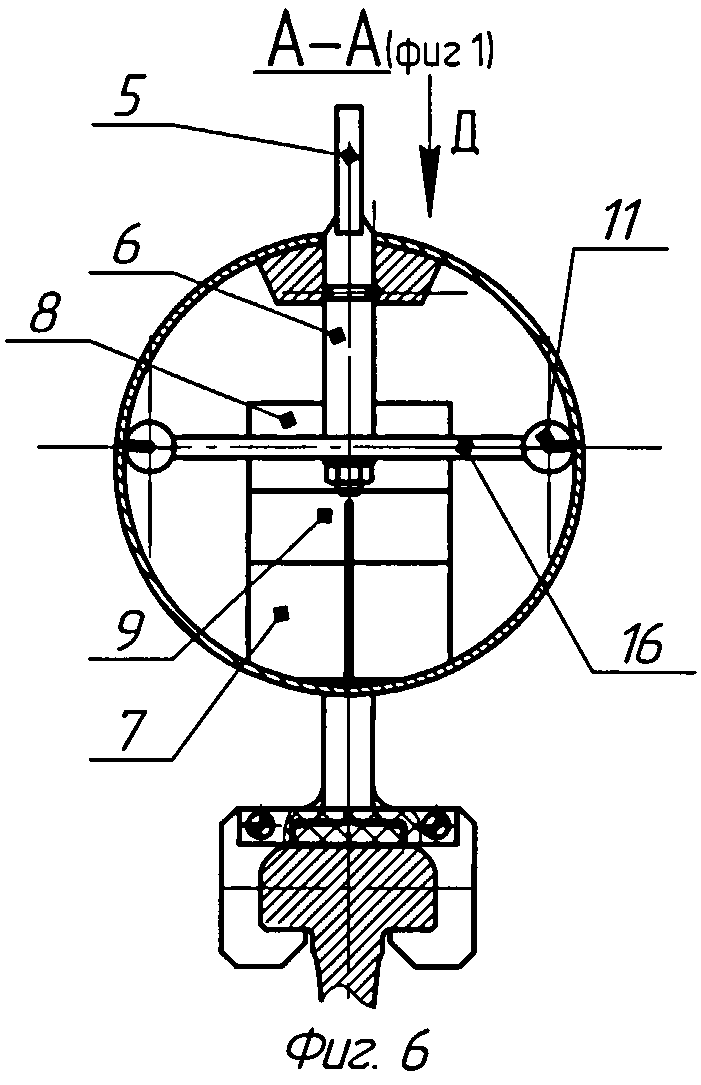
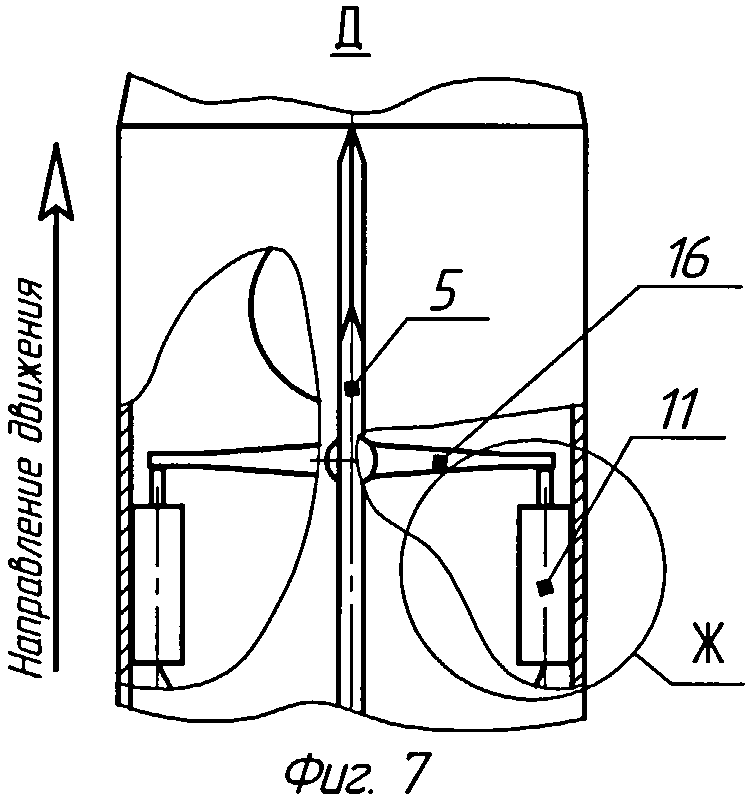
- на фиг.6 и 7 изображены поперечное сечение и вид сверху первого варианта устройства с устройством вращения крыла, содержащим пиротолкатели, и с устройством определения крена, содержащим гироскоп или контактные датчики;
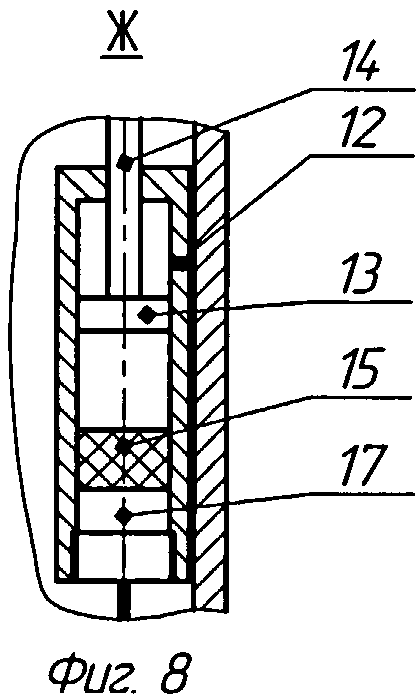
- на фиг.8 изображены пиротолкатель с системой поджига порохового заряда пиротолкателей, выполненной в виде пиропатрона, в первом варианте устройства;
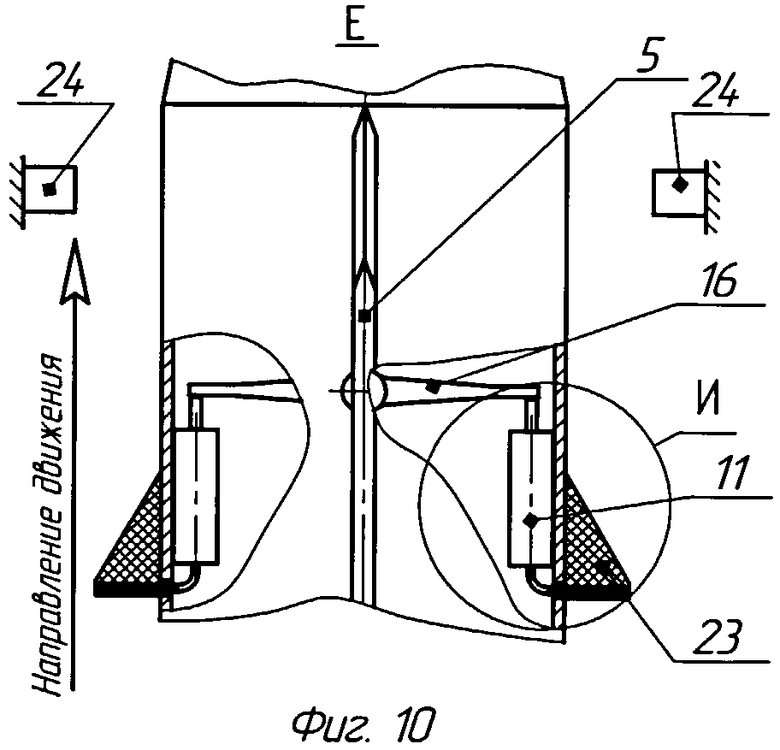
- на фиг.9 и 10 изображены поперечное сечение и вид сверху первого варианта устройства с устройством вращения крыла, содержащим пиротолкатели, и с устройством определения крена, содержащим ударники;
- на фиг.11 изображены пиротолкатель с системой поджига порохового заряда в виде запального порохового заряда и металлической трубки с ВВ;
- на фиг.12 и 13 изображены общие виды сбоку и спереди второго варианта заявляемого устройства;
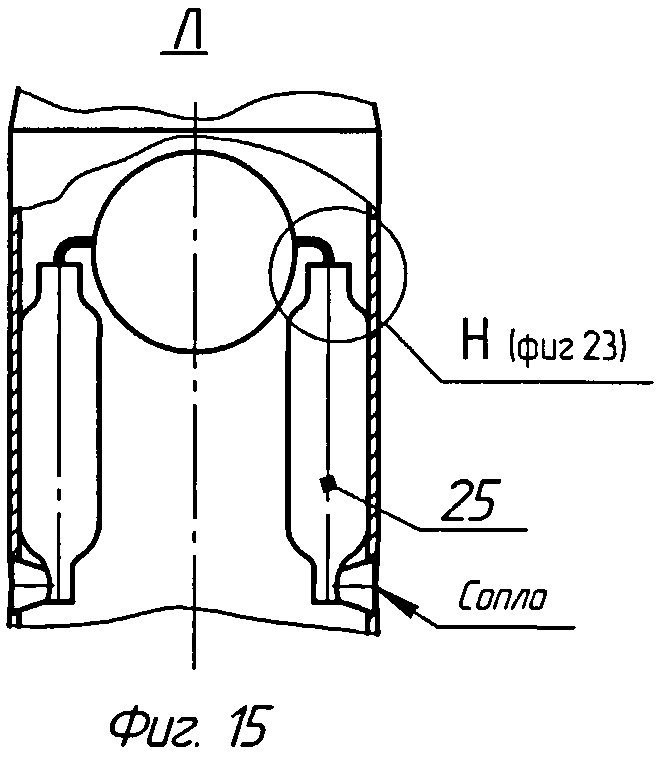
- на фиг.14 и 15 изображены поперечное сечение и вид сверху второго варианта устройства с устройством определения крена, содержащим контактные датчики;
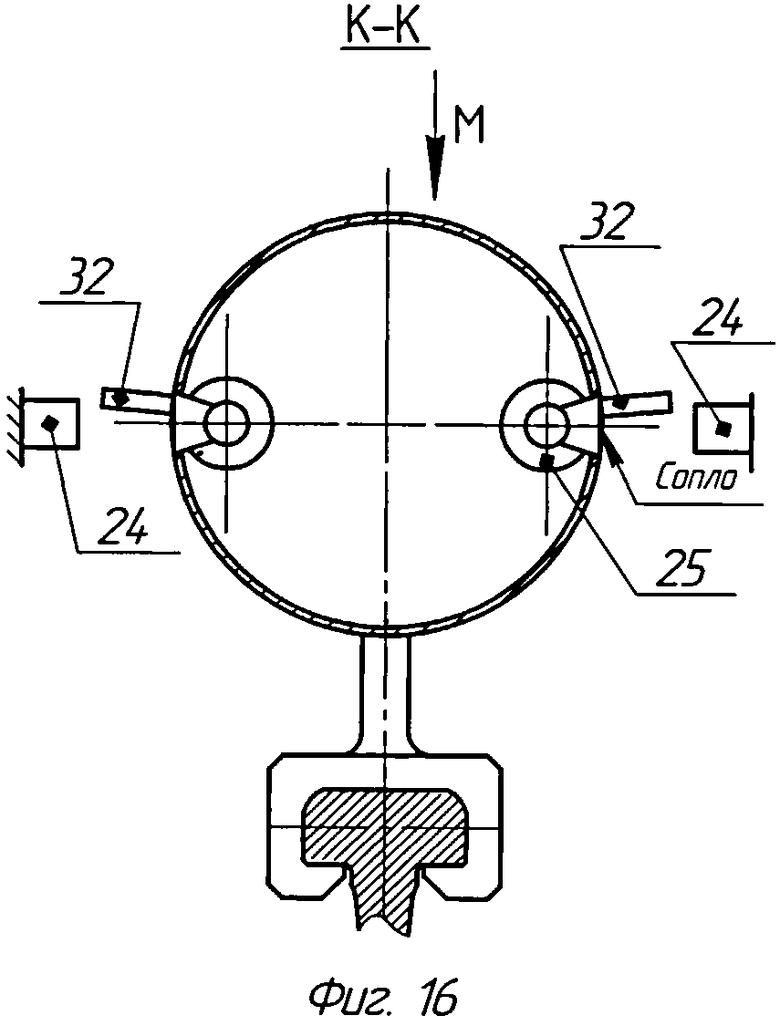
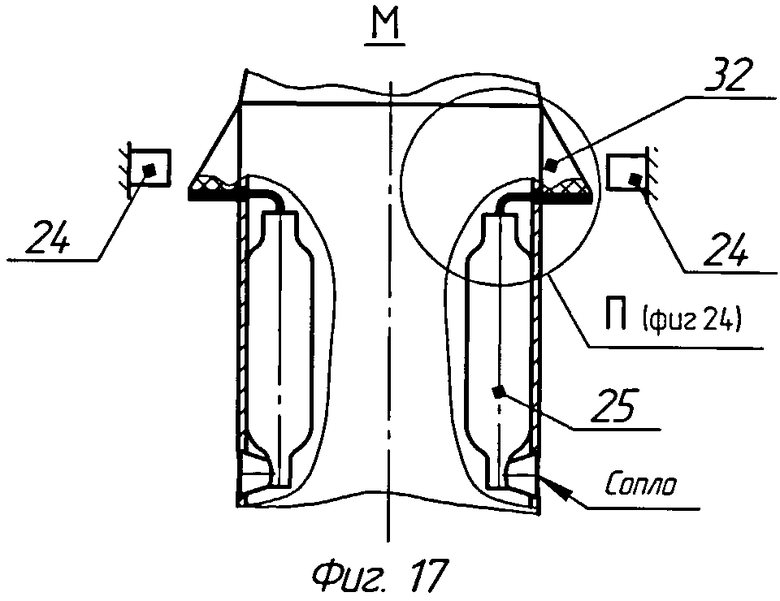
- на фиг.16 и 17 изображены поперечное сечение и вид сверху второго варианта устройства с устройством определения крена, содержащим ударники;
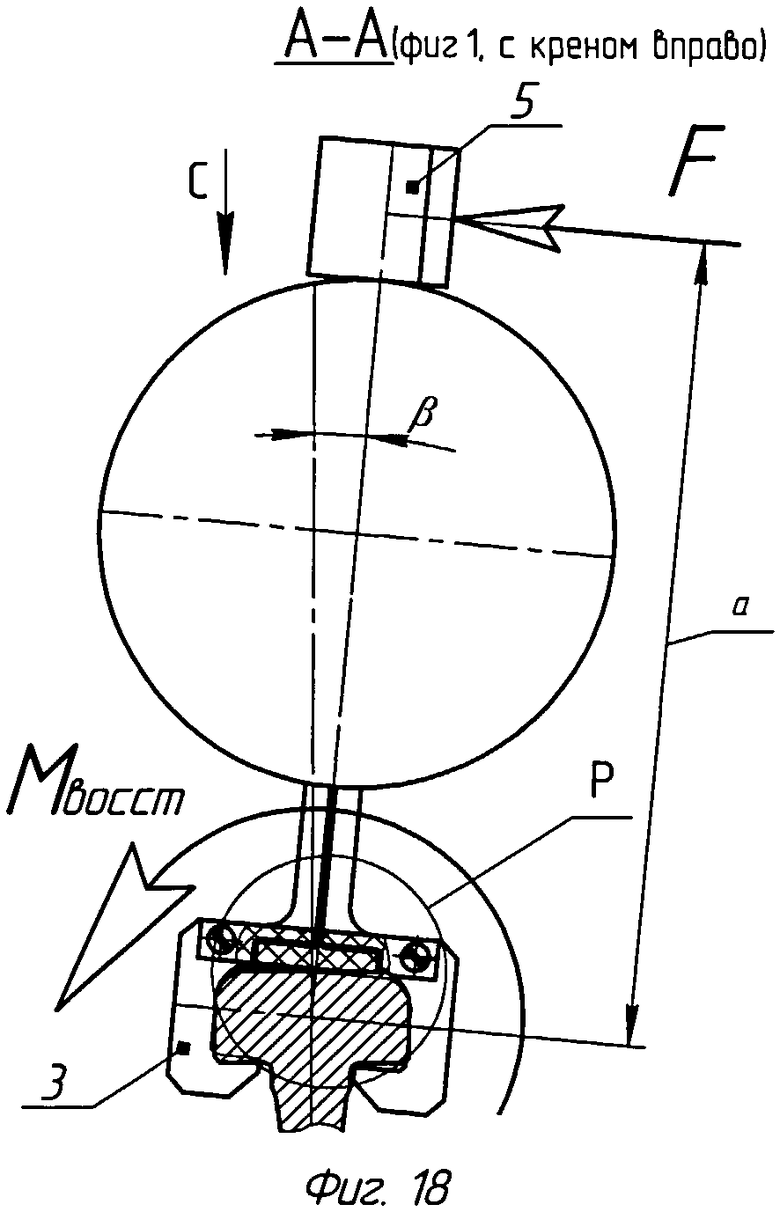
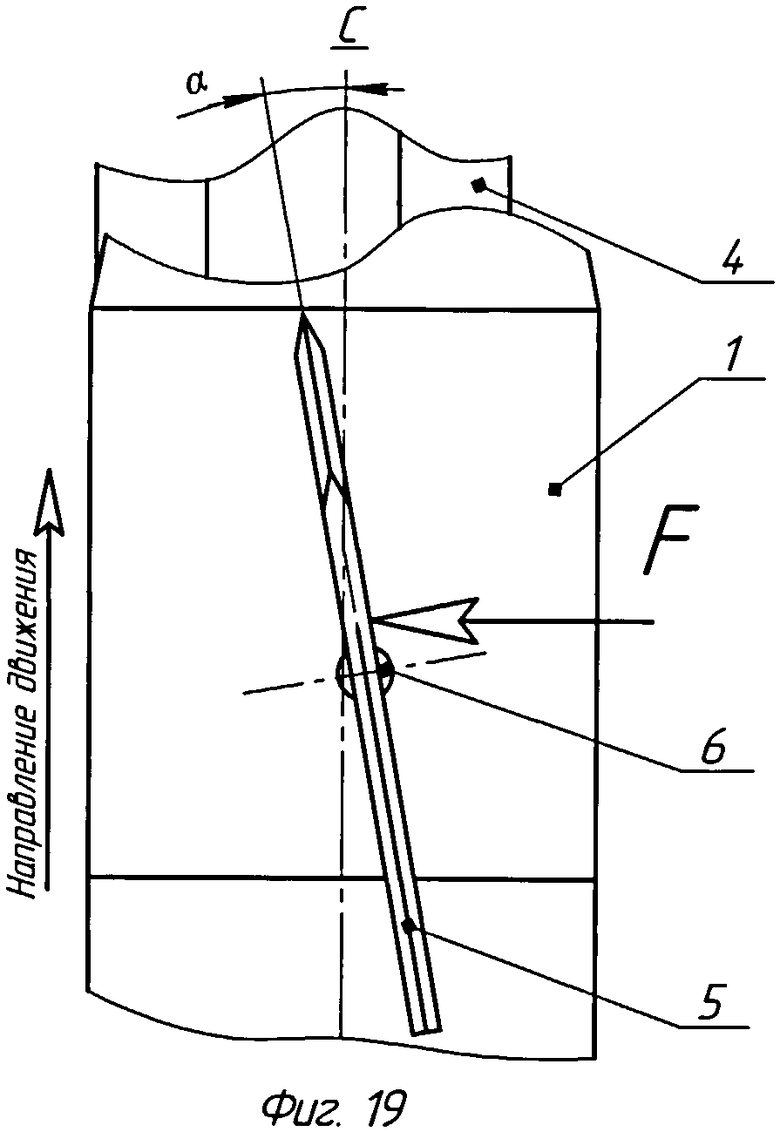
- на фиг.18 и 19 изображены поперечное сечение и вид сбоку первого варианта устройства с устройством вращения крыла в виде шагового двигателя и с устройством определения крена, содержащим гироскоп или контактные датчики, при крене РТ;
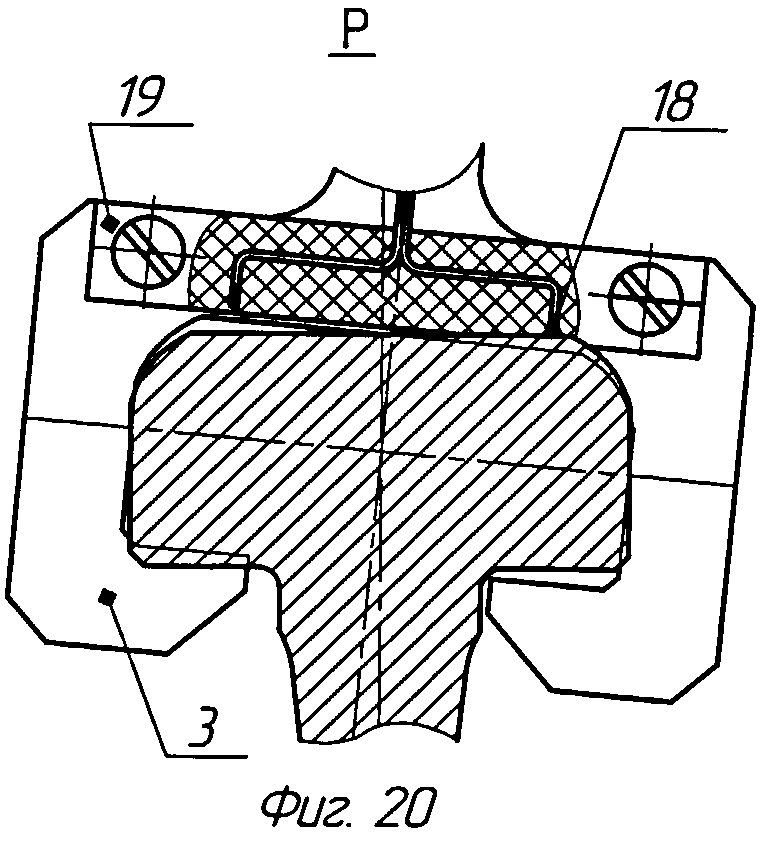
- на фиг.20 изображены в увеличенном виде контактные датчики устройства определения крена при крене РТ;
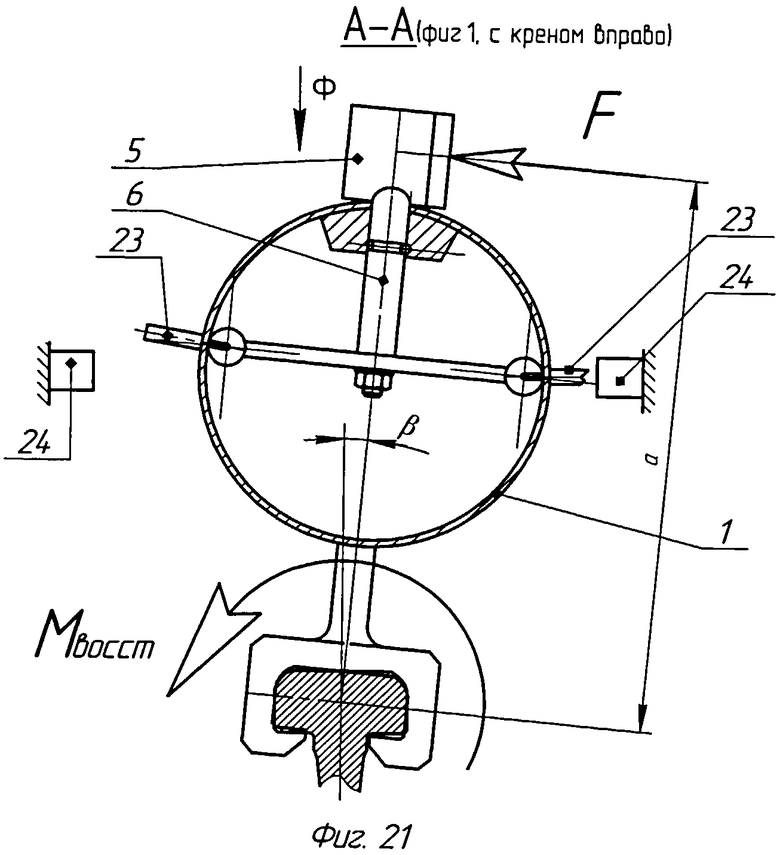
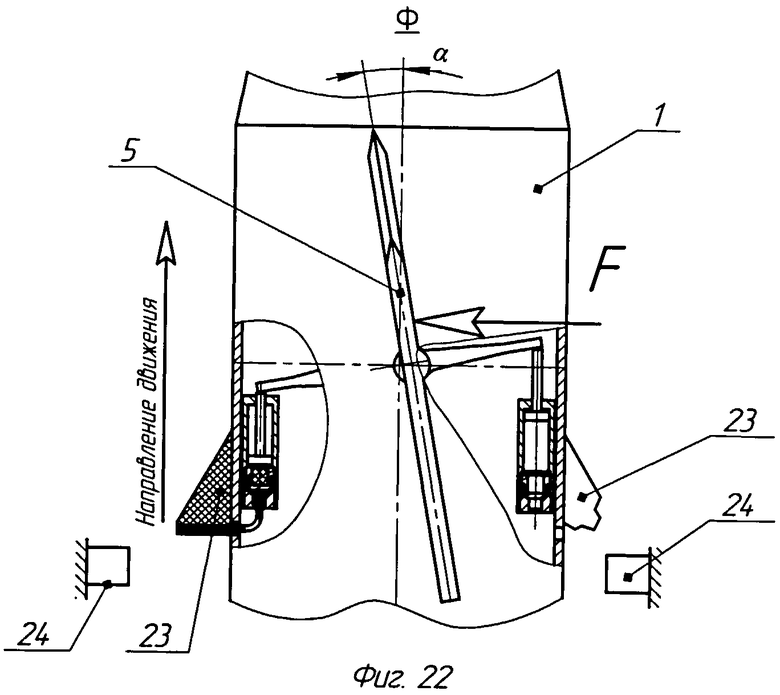
- на фиг.21 и 22 изображены поперечное сечение и вид сверху первого варианта устройства с устройством вращения крыла, содержащим пиротолкатели, и с устройством определения крена, содержащим ударники, при крене РТ;
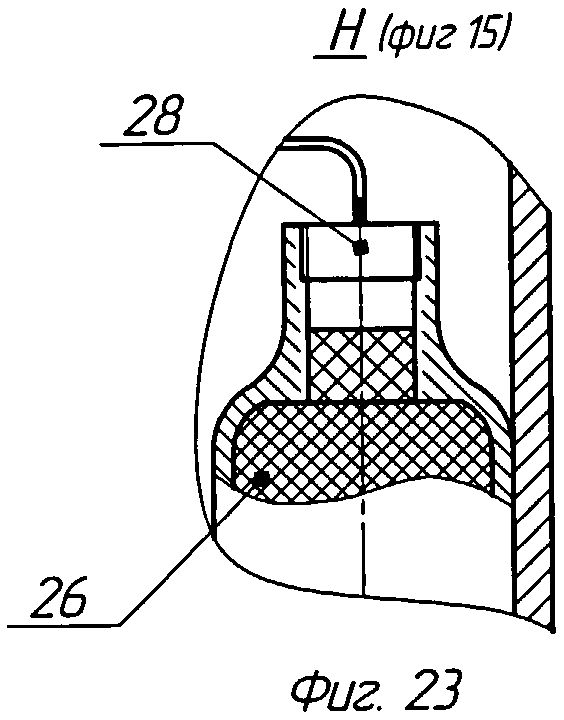
- на фиг.23 изображен элемент РД во втором варианте устройства с системой поджига порохового заряда пиропатроном;
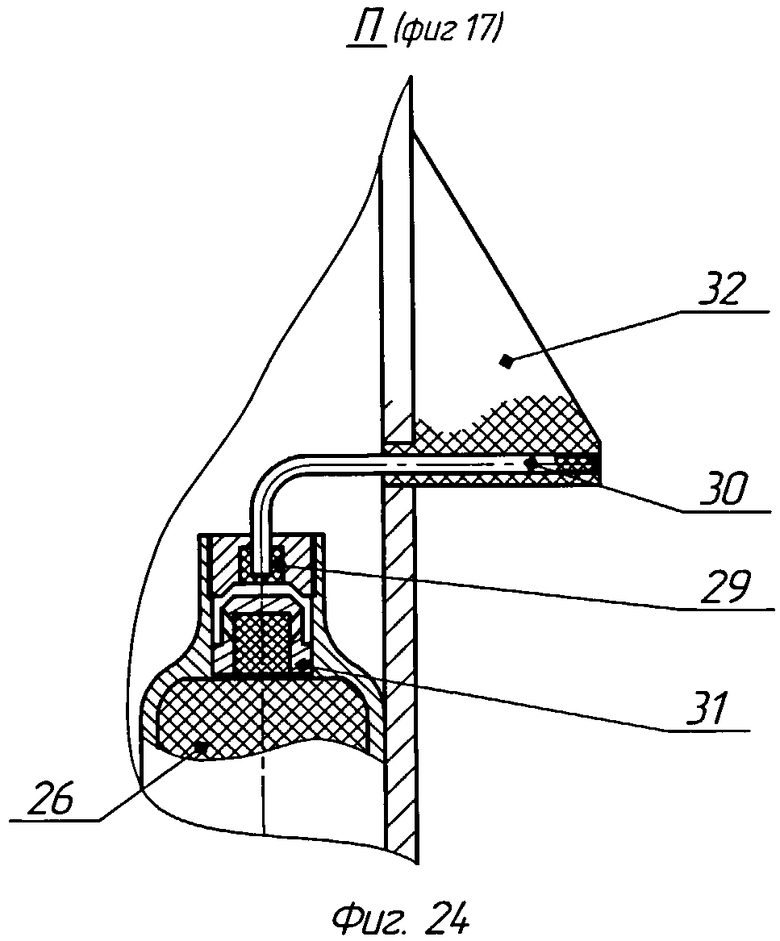
- на фиг.24 изображен элемент РД во втором варианте устройства с системой поджига порохового заряда в виде запального порохового заряда и металлической трубки с ВВ;
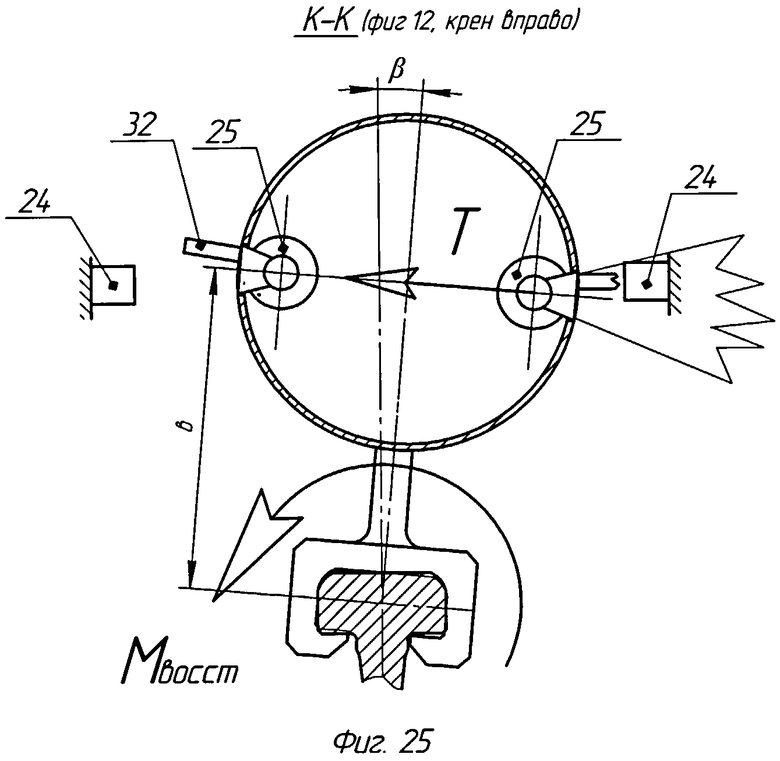
- на фиг.25 изображено поперечное сечение второго варианта устройства с устройством определения крена, содержащим ударники, при крене РТ.
Стабилизирующее устройство монорельсовой РТ 1 (первый вариант) с разгоняемым объектом 2, установленной на жестко связанном с РТ башмаке 3, охватывающем головку рельсовой направляющей 4 ракетного трека (на фигуре не показан) с возможностью перемещения вдоль нее, содержит крыло 5, установленное на верхней наружной поверхности РТ. Стабилизирующее устройство снабжено устройством определения крена 8 РТ, выполненным с возможностью передачи сигнала на установленное на РТ 1 устройство вращения крыла. Крыло 5 выполнено в виде пластины, заостренной спереди по ходу движения РТ, и закреплено на наружной поверхности РТ в вертикальной плоскости, проходящей через продольную ось РТ 1 с возможностью вращения при помощи вала 6, установленного в корпус РТ, перпендикулярно направлению движения РТ. Стабилизирующее устройство может быть снабжено установленным на РТ устройством управления 7 устройством вращения крыла, соединенным электрической связью (на фигуре не показано) с устройством определения крена 8 РТ и устройством вращения крыла. Устройство определения крена 8 РТ выполнено с возможностью передачи сигнала на устройство вращения крыла через устройство управления 7 устройством вращения крыла. Устройство определения крена 8 РТ и устройство управления 7 устройством вращения крыла снабжены установленным на РТ 1 источником питания 9.
Устройство вращения крыла может быть выполнено в виде шагового двигателя (ШД) 10, вал которого механической связью соединен с валом 6 крыла 5 (на фигуре не показано).
Устройство вращения крыла может быть также выполнено (см. фиг.6-8) в виде по крайней мере двух пиротолкателей 11, содержащих цилиндры 12 с размещенными в них поршнями 13 со штоками 14, пороховыми зарядами 15 и системой поджига пороховых зарядов 15 пиротолкателей 11, а также двуплечего рычага 16, жестко закрепленного на валу 6 крыла 5. Пиротолкатели 11 установлены с возможностью взаимодействия концов их штоков 14 с концами двуплечего рычага 15.
Система поджига пороховых зарядов 15 пиротолкателей 11 может быть выполнена в виде пиропатрона 17, электрически связанного с устройством управления 7 устройством вращения крыла.
Устройство определения крена 8 РТ 1 может содержать гироскоп (на фигуре не показан) и быть установлено на РТ.
Устройство определения крена 8 РТ 1 может быть также выполнено содержащим по крайней мере два контактных датчика 18, закрепленных симметрично относительно вертикальной плоскости, проходящей через продольную ось РТ 1, на заднем по ходу движения РТ торце башмака 3 с помощью колодки 19, выполненной из теплоизоляционного материала, менее износостойкого чем материал башмака 3. При этом чувствительные элементы датчиков 18 расположены над поверхностью головки РН 4 на расстоянии L (см. фиг.5), меньшем величины допустимого износа в поперечном направлении контактирующей с ней поверхности башмака 3.
Система поджига пороховых зарядов 15 пиротолкателей 11 (см. фиг.11) может быть также выполнена в виде запального порохового заряда 20, размещенного в цилиндре 12 пиротолкателя 11, и металлической трубки 21, заполненной ВВ. Один конец трубки 21 размещен в запальном пороховом заряде 20, размещенном в цилиндре 12 и отделенном от порохового заряда 15 обратным клапаном 22. Второй конец трубки 21 закреплен на одной из боковых поверхностей РТ 1 при помощи легкоразрушаемого обтекателя 23. При этом устройство определения крена РТ выполнено содержащим ударники 24, размещенные на ракетном треке по ходу движения РТ 1 с двух сторон от рельсовой направляющей 4 с заданным шагом с возможностью их взаимодействия со вторым концом металлической трубки 21 при заданной величине крена РТ 1.
Стабилизирующее устройство монорельсовой РТ 1 (второй вариант, см. фиг.12÷17) с разгоняемым объектом 2 содержит дополнительно установленную на РТ 1 по крайней мере одну пару твердотопливных (в данном примере) РД 25, векторы тяги которых направлены в противоположные стороны перпендикулярно вертикальной плоскости, проходящей через продольную ось РТ 1, систему поджига порохового заряда 26 РД 25 и устройство определения крена 8 РТ, выполненное с возможностью передачи сигнала на систему поджига порохового заряда 26 РД.
Стабилизирующее устройство монорельсовой РТ может быть снабжено установленным на РТ 1 устройством управления 27 системой поджига порохового заряда 26 РД 25, выполненной в виде пиропатрона 28 (см. фиг.23). Устройство определения крена 8 РТ 1 выполнено с возможностью передачи сигнала на систему поджига порохового заряда РД через устройство управления 27 системой поджига порохового заряда 26 РД, при этом устройство определения крена 8 и устройство управления 27 системой поджига порохового заряда 26 РД снабжены установленным на РТ 1 источником питания 9.
Устройство определения крена 8 РТ может быть выполнено содержащим гироскоп (на фигуре не показано) и установлено на РТ 1.
Устройство определения крена 8 РТ может быть также выполнено содержащим по крайней мере два контактных датчика 18, закрепленных симметрично относительно вертикальной плоскости, проходящей через продольную ось РТ 1, на заднем по ходу движения РТ торце башмака 3 с помощью колодки 19, выполненной из теплоизоляционного материала, менее износостойкого, чем материал башмака 3. При этом чувствительные элементы датчиков 18 расположены над поверхностью головки РН 4 на расстоянии L (см. фиг.5), меньшем величины допустимого износа в поперечном направлении контактирующей с ней поверхности башмака 3.
Система поджига пороховых зарядов 29 РД 25 может быть также выполнена в виде запального порохового заряда 29 (см. фиг.24), размещенного в РД 25 и металлической трубки 30, заполненной ВВ. Один конец трубки 30 размещен в запальном пороховом заряде 29, установленном в РД и отделенном от порохового заряда 26 обратным клапаном 31. Второй конец трубки 30 закреплен на одной из боковых поверхностей РТ 1 при помощи легкоразрушаемого обтекателя 32. При этом устройство определения крена РТ выполнено содержащим ударники 24, размещенные на ракетном треке по ходу движения РТ 1 с двух сторон от рельсовой направляющей 4 с заданным шагом с возможностью взаимодействия со вторым концом металлической трубки 30 при заданной величине крена РТ 1.
Первый способ стабилизации монорельсовой ракетной тележки осуществляется при работе первого варианта устройства стабилизации монорельсовой РТ следующим образом. РТ 1, как правило, размещают на РН 4 при помощи двух разнесенных по длине РТ башмаков. Стабилизирующее устройство размещают, как правило, над первым по ходу движения РТ башмаком. Перед проведением эксперимента для заданных массы и скорости ОИ 2, длины разгонного участка, с учетом имеющихся типов ракетных двигателей определяют состав РТ 1 и ее массу. Выбирают минимальные зазоры между головкой РН 4 и контактирующими с ней поверхностями башмаков 3, обеспечивающие свободный ход башмаков 3 с учетом точности изготовления и установки РН на ракетном треке. В зависимости от скорости разгона и центровочных характеристик РТ 1 выбирают параметры крыла 5 и зависимость величины установки его угла атаки α от угла крена β РТ 1 такими, чтобы восстанавливающий момент аэродинамических сил (см. фиг.18 и 19)
Мвосст=F·a,
где: F - поперечная составляющая аэродинамической силы, действующей на крыло;
а - расстояние от продольной оси головки РН 4 до линии приложения поперечной составляющей аэродинамической силы F, действующей на крыло;
при крене РТ 1 был больше возмущающего момента. Причем величина восстанавливающего момента должна быть такой, чтобы за время τ≤0,2 с движения РТ 1 по ракетному треку после входа ее в крен обеспечить остановку развития крена и возвращение РТ 1 в номинальное положение.
Далее запускают ракетный двигатель РТ 1 и разгоняют РТ 1 с ОИ 2 до заданной скорости. В ходе движения РТ 1 по РН 4 при крене РТ устройство определения крена 8, например на основе гироскопа, постоянно определяет фактический угол β крена РТ 1. При разгоне РТ 1 с перегрузками, при которых гироскоп теряет работоспособность, может применяться устройство определения крена, содержащее контактные датчики 18 (в данном примере два). Следует отметить, что устройство определения крена 8 с контактными датчиками 18 может использоваться при любых темпах разгона РТ. Например, при крене РТ 1 в правую сторону происходит интенсивный износ правой стороны верхней поверхности башмака 3, контактирующей с поверхностью головки РН 4 (см. фиг.20). Одновременно, при трении о поверхность головки РН 4 изнашивается и колодка 19. Так продолжается до момента касания стальной поверхности головки РН 4 с чувствительным элементом датчика 18 (до критического угла крена βкр РТ 1). В момент касания с головкой РН 4 чувствительного элемента сигнал от датчика 18 принимается устройством определения крена 8 РТ 1, а затем передается в устройство управления 7 устройством вращения крыла. При достижении РТ 1 критического угла крена βкр устройство управления 7 устройством вращения крыла подает сигнал на устройство вращения крыла, которое через вал 6 поворачивает крыло 5 на требуемый угол атаки α. В качестве устройства вращения крыла может использоваться ШД 10 или (в случае необходимости увеличения мощности и быстродействия) устройство вращения на основе (в данном примере двух) пиротолкателей 11. В этом случае устройство управления 7 устройством вращения крыла подает сигнал на поджиг соответствующего пиропатрона 17, который поджигает пороховой заряд 15. Под действием давления пороховых газов двигается поршень 13 и через шток 14, двуплечий рычаг 15 и вал 6 вращает крыло 5 на заданный угол α (см. фиг.22).
При скоростях РТ больше 1 км/с может использоваться устройство определения крена РТ 1 с ударниками 24. При крене РТ 1 на критический угол βкр металлическая трубка 21 с ВВ соударяется с ударником 24. В результате ВВ в металлической трубке 21 инициируется и поджигает запальный пороховой заряд 20, который через окна в обратном клапане 22 поджигает основной пороховой заряд 15. Далее все происходит так, как описано выше. Следует отметить, что в этом случае не требуется источника тока и электрических устройств и коммуникаций.
Итак, например, при крене РТ 1 на правую сторону на угол βкр (см. фиг.18, 19, 21 и 22) в первом варианте устройства крыло 5 поворачивают влево на угол α (против часовой стрелки на виде сверху). Аэродинамическая сила F, действующая на крыло 5, направлена влево. Под действием восстанавливающего момента крен прекращается, и РТ 1 возвращается в исходное положение. При крене РТ 1, например, в левую сторону, аналогично, получают восстанавливающий момент, кренящий РТ вправо.
Второй способ стабилизации монорельсовой ракетной тележки осуществляется при работе второго варианта устройства стабилизации монорельсовой РТ следующим образом. РТ 1, как правило, размещают на РН при помощи двух разнесенных по длине РТ башмаков. Стабилизирующее устройство размещают, как правило, над первым по ходу движения РТ башмаком. Перед проведением эксперимента для заданных массы и скорости ОИ 2, длины разгонного участка с учетом имеющихся типов ракетных двигателей определяют состав РТ 1 и ее массу. Выбирают минимальные зазоры между рельсовой направляющей и контактирующими с ними поверхностями башмаков, обеспечивающие свободный ход башмаков с учетом точности изготовления и установки РН на ракетном треке. В зависимости от скорости разгона, массовых и центровочных характеристик РТ 1 выбирают тягу Т и время работы РД 25 такими, чтобы восстанавливающий момент тяги РД 25 (см. фиг.25)
Мвосст=Т·b,
где: Т - тяга РД 25;
b - расстояние от продольной оси головки РН 4 до линии приложения поперечной составляющей тяги РД 25;
при крене РТ 1 был больше возмущающего момента. Причем величина восстанавливающего момента должна быть такой, чтобы за время τ≤0,2 с движения РТ 1 по ракетному треку после входа ее в крен обеспечить остановку развития крена и возвращение РТ 1 в номинальное положение.
Далее запускают ракетный двигатель, входящий в состав ракетной тележки 1, и разгоняют РТ 1 с ОИ 2 до заданной скорости. В ходе движения РТ 1 по РН 4 при крене РТ устройство определения крена 8 (на основе гироскопа или контактных датчиков 18), аналогично, как и в первом варианте, определяет критический угол крена βкр РТ 1. При достижении РТ 1 критического угла крена βкр устройство управления 27 системой поджига порохового заряда 26 РД 25 подает сигнал на поджиг соответствующего пиропатрона 28, который поджигает пороховой заряд 26 РД 25.
При скоростях больше 1 км/с может использоваться устройство определения крена РТ 1 и система поджига порохового заряда 26 РТ 25 с ударниками 24, которое работает так же, как и в первом варианте устройства. Следует отметить, что в этом случае так же не требуется источника тока и электрических устройств и коммуникаций на борту РТ 1.
Итак, например, при крене РТ 1 на правую сторону на угол βкр (см. фиг.25) во втором варианте устройства поджигают РД 1, вектор тяги которого направлен влево. Под действием восстанавливающего момента тяги РД 25 крен прекращается, и РТ 1 возвращается в исходное положение. При крене РТ 1, например, в левую сторону, аналогично, получают восстанавливающий момент, кренящий РТ вправо.
Таким образом, предложенные варианты способа стабилизации монорельсовой ракетной тележки и варианты устройства для их осуществления, по сравнению с прототипами, позволяют устранить крен и, соответственно, увеличить скорость разгона и точность доставки ОИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ МОНОРЕЛЬСОВОЙ РАКЕТНОЙ ТЕЛЕЖКИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2502934C1 |
| Способ поддержания равновесия двухколесного одноколейного транспортного средства путем управления положением центра тяжести с помощью скользящей оси | 2016 |
|
RU2613984C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТОВ ПРИ ВЫСОКИХ ТЕМПЕРАТУРАХ | 2008 |
|
RU2367934C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| ГОЛОВНАЯ ЧАСТЬ ПРОТИВОГРАДОВОЙ РАКЕТЫ | 1990 |
|
SU1793785A1 |
| НЕУПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 2014 |
|
RU2595070C2 |
| СПОСОБ ВОСПЛАМЕНЕНИЯ ПОРОХОВОГО ЗАРЯДА НА БОРТУ ДВИЖУЩЕГОСЯ РАКЕТНОГО ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2408833C1 |
| Ракета для ведения воздушной разведки | 2020 |
|
RU2738398C1 |
| СПОСОБ РАЗГОНА ОБЪЕКТА ИСПЫТАНИЙ РЕАКТИВНЫМ АППАРАТОМ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369853C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ), ВЗЛЕТНО-ПОСАДОЧНОЕ ШАССИ (ВАРИАНТЫ) И СПОСОБ ПОДЪЕМА В ВОЗДУХ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2012 |
|
RU2588198C2 |

Изобретение относится к пусковым установкам, а именно к испытательным стендам. Стабилизирующее устройство монорельсовой ракетной тележки (РТ) ракетного трека содержит крыло в виде заостренной пластины, вал, устройство определения крена с гироскопом и двумя контактными датчиками, устройство вращения крыла в виде шагового двигателя или в виде двух пиротолкателей с цилиндрами, штоками и пороховыми зарядами, устройство управления устройством вращения крыла с источником питания, башмак, колодку, систему поджига порохового заряда пиротолкателей в виде запального порохового заряда, пару ракетных двигателей (РД). Крыло устанавливают в вертикальной плоскости и во время движения РТ устраняют изменение угла атаки, устанавливают пару РД и во время движения РТ устраняют крен. Изобретение позволяет стабилизировать крен на все длине разгонного участка. 4 н. и 11 з.п. ф-лы, 25 ил. 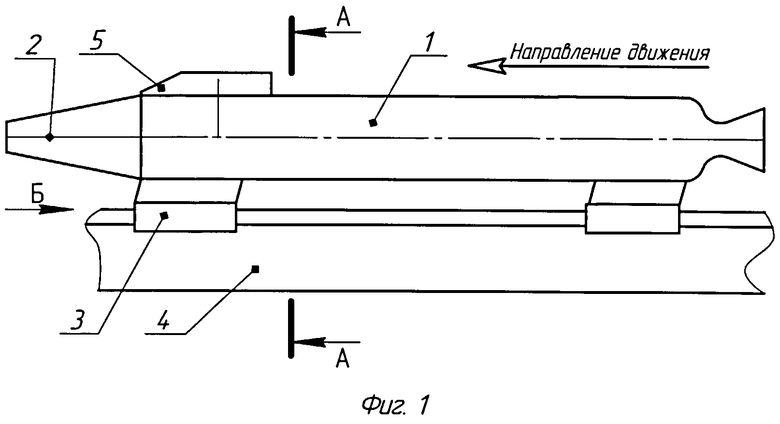
1. Способ стабилизации монорельсовой ракетной тележки (РТ) ракетного трека путем устранения ее крена, включающий установку крыла на наружную поверхность ракетной тележки, отличающийся тем, что крыло устанавливают в вертикальной плоскости, проходящей через продольную ось РТ, на ее верхней поверхности, при этом в ходе движения РТ по рельсовой направляющей крен РТ устраняют соответствующим изменением угла атаки крыла за счет восстанавливающего момента возникающих при этом аэродинамических сил.
2. Способ стабилизации монорельсовой ракетной тележки (РТ) ракетного трека путем устранения ее крена, отличающийся тем, что на ракетной тележке устанавливают по крайней мере одну пару ракетных двигателей (РД), векторы тяги которых направлены в противоположные стороны перпендикулярно вертикальной плоскости, проходящей через продольную ось РТ, при этом в ходе движения крен РТ устраняют за счет восстанавливающего момента реактивных сил, создаваемых работающим РД, вектор тяги которого направлен в сторону, противоположную крену РТ.
3. Стабилизирующее устройство монорельсовой ракетной тележки (РТ) ракетного трека, содержащее крыло, установленное на наружной поверхности ракетной тележки, отличающееся тем, что крыло выполнено в виде пластины, заостренной спереди по ходу движения РТ, и закреплено на ее верхней поверхности в вертикальной плоскости, проходящей через продольную ось РТ с возможностью вращения при помощи вала, установленного в корпус РТ перпендикулярно направлению движения РТ, снабжено устройством определения крена РТ, выполненным с возможностью передачи сигнала на установленное на РТ устройство вращения крыла.
4. Стабилизирующее устройство монорельсовой РТ по п.3, отличающееся тем, что снабжено установленным на РТ устройством управления устройством вращения крыла, соединенным электрической связью с устройством определения крена и устройством вращения крыла, при этом устройство определения крена РТ выполнено с возможностью передачи сигнала на устройство вращения крыла через устройство управления устройством вращения крыла, устройство определения крена РТ и устройство управления устройством вращения крыла снабжены установленным на РТ источником питания.
5. Стабилизирующее устройство монорельсовой РТ по п.4, отличающееся тем, что устройство вращения крыла выполнено в виде шагового двигателя (ШД), при этом вал ШД механической связью соединен с валом крыла.
6. Стабилизирующее устройство монорельсовой РТ по п.3, отличающееся тем, что устройство вращения крыла выполнено в виде по крайней мере двух пиротолкателей, содержащих цилиндры с размещенными в них поршнями со штоками и пороховыми зарядами, систему поджига пороховых зарядов пиротолкателей, а также двуплечего рычага, жестко закрепленного на валу крыла, при этом пиротолкатели установлены с возможностью взаимодействия концов их штоков с концами двуплечего рычага.
7. Стабилизирующее устройство монорельсовой РТ по п.6, отличающееся тем, что устройство управления устройством вращения крыла выполнено управляющим системой поджига порохового заряда пиротолкателей, которая при этом выполнена в виде пиропатрона, электрически связанного с устройством управления устройством вращения крыла.
8. Стабилизирующее устройство монорельсовой РТ по п.3, отличающееся тем, что устройство определения крена РТ установлено на РТ и выполнено содержащим гироскоп.
9. Стабилизирующее устройство монорельсовой РТ по п.3, отличающееся тем, что устройство определения крена РТ выполнено содержащим по крайней мере два контактных датчика, закрепленных симметрично относительно вертикальной плоскости, проходящей через продольную ось РТ, на заднем по ходу движения РТ торце башмака с помощью колодки, выполненной из теплоизоляционного материала, менее износостойкого, чем материал башмака, чувствительные элементы датчиков расположены над поверхностью головки РН на расстоянии, меньшем величины допустимого износа в поперечном направлении контактирующей с ней поверхности башмака.
10. Стабилизирующее устройство монорельсовой РТ по п.6, отличающееся тем, что система поджига порохового заряда пиротолкателей выполнена в виде запального порохового заряда, размещенного в цилиндре пиротолкателя и металлической трубки, заполненной взрывчатым веществом, один конец трубки размещен в запальном пороховом заряде, отделенном от порохового заряда обратным клапаном, а другой закреплен на одной из боковых поверхностей РТ при помощи легкоразрушаемого обтекателя, при этом устройство определения крена РТ выполнено содержащим ударники, размещенные на ракетном треке по ходу движения РТ с двух сторон от рельсовой направляющей с заданным шагом с возможностью их взаимодействия со вторым концом металлической трубки при заданной величине крена РТ.
11. Стабилизирующее устройство монорельсовой ракетной тележки (РТ) ракетного трека, отличающееся тем, что на ракетной тележке установлена по крайней мере одна пара ракетных двигателей (РД), векторы тяги которых направлены в противоположные стороны перпендикулярно вертикальной плоскости, проходящей через продольную ось РТ, система поджига порохового заряда РД и устройство определения крена РТ, выполненное с возможностью передачи сигнала на систему поджига порохового заряда РД.
12. Стабилизирующее устройство монорельсовой РТ по п.11, отличающееся тем, что снабжено установленным на РТ устройством управления системой поджига порохового заряда РД, система поджига выполнена в виде пиропатрона, устройство определения крена РТ выполнено с возможностью передачи сигнала на систему поджига РД через устройство управления системой поджига порохового заряда РД, при этом устройство определения крена и устройство управления системой поджига порохового заряда РД снабжены установленным на РТ источником питания.
13. Стабилизирующее устройство монорельсовой РТ по п.12, отличающееся тем, что устройство определения крена РТ установлено на РТ и выполнено содержащим гироскоп.
14. Стабилизирующее устройство монорельсовой РТ по п.12, отличающееся тем, что устройство определения крена РТ выполнено содержащим по крайней мере два контактных датчика, закрепленных симметрично относительно вертикальной плоскости, проходящей через продольную ось РТ, на заднем по ходу движения РТ торце башмака с помощью колодки, выполненной из теплоизоляционного материала, менее износостойкого, чем материал башмака, чувствительные элементы датчиков расположены над поверхностью головки РН на расстоянии, меньшем величины допустимого износа в поперечном направлении контактирующей с ней поверхности башмака.
15. Стабилизирующее устройство монорельсовой РТ ракетного трека по п.11, отличающееся тем, что система поджига порохового заряда РД выполнена в виде запального порохового заряда, размещенного в РД, и металлической трубки, заполненной взрывчатым веществом, один конец трубки размещен в запальном пороховом заряде, отделенном от порохового заряда обратным клапаном, а другой закреплен на одной из боковых поверхностей РТ при помощи легкоразрушаемого обтекателя, устройство определения крена РТ содержит ударники, размещенные на ракетном треке по ходу движения РТ с двух сторон от рельсовой направляющей с заданным шагом с возможностью их взаимодействия со вторым концом металлической трубки при заданной величине крена РТ.
| Устройство для крепления монорельса | 1982 |
|
SU1049668A1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НАВЕСНОГО ТИПА | 1999 |
|
RU2145557C1 |
| ТРАНСПОРТНАЯ СИСТЕМА "ТРАНСПОРТ-МОНОРЕЛЬС-ТЕТРАЭДР" | 2007 |
|
RU2374102C2 |
| US 20060032986 A1, 16.02.2006 | |||
| US 6321657 B1, 27.11.2001 | |||

