Изобретение относится к испытательной технике и может быть использовано для исследования объектов на ракетном треке.
Проблема таких испытаний заключается в достижении максимально возможных скоростей разгона объектов испытаний (ОИ). Для этого энергетически выгодно использовать монорельсовые ракетные поезда из нескольких ракетных тележек (РТ), так как, по сравнению с двухрельсовыми поездами, за счет уменьшения количества опорных башмаков уменьшаются масса ракетных тележек и их мидель (следовательно, и аэродинамическое сопротивление).
Известен способ стабилизации монорельсовой ракетной тележки, выбранный в качестве прототипа для вариантов заявляемого способа, включающий установку с отрицательным углом атаки крыльев на противоположных боковых поверхностях ее стабилизирующего устройства в виде башмака, размещенного на рельсовой направляющей (РН), устранение увеличения крена РТ после выбора технологических зазоров между башмаком и головкой РН силами опорных реакций (см. «Высокоскоростные монорельсовые ракетные тележки для аэродинамических испытаний при больших числах Рейнольдса», перевод ВИНИТИ №81087/0, 1970 г., D.J. Rigali, L.V. Feltz «High-Speed Monorail Rocket Sleds for Aerodynamic Testing at High Reynolds Numbers», Journal of Spacecraft and Rockets, 1968 г. т.5, №11, стр.1341-1346).
Известно устройство стабилизации монорельсовой РТ, выбранное в качестве прототипа для вариантов заявляемого устройства, содержащее, по крайней мере, один жестко связанный с РТ башмак, охватывающий головку РН с возможностью перемещения вдоль нее. На боковых поверхностях башмака с отрицательным углом атаки жестко закреплены два крыла. Крылья расположены симметрично относительно вертикальной плоскости, проходящей через продольную ось башмака (см. «Высокоскоростные монорельсовые ракетные тележки для аэродинамических испытаний при больших числах Рейнольдса», перевод ВИНИТИ №81087/0, 1970 г., D.J. Rigali, L.V. Feltz «High-Speed Monorail Rocket Sleds for Aerodynamic Testing at High Reynolds Numbers», Journal of Spacecraft and Rockets, 1968 г. т.5, №11, стр.1341-1346).
Недостатком известных способа и устройства стабилизации монорельсовой РТ является следующее. Как показала практика, при высоких скоростях РТ происходит прогрессирующее увеличение поперечного крена РТ в пределах увеличивающегося зазора между башмаком и РН за счет износа поверхностей башмака, сопрягающихся с головкой РН. Рост крена приводит к линейному контакту и интенсификации износа башмака в местах линейного контакта с РН. Это, в итоге, приводит к значительному отклонению ОИ от заданного направления движения или к разрушению башмака и аварийному сходу РТ с РН. Отсутствует возможность влиять на крен в ходе движения РТ. Для обеспечения требуемой точности доставки ОИ и исключения аварий необходимо снижать скорость разгона ОИ.
Задачей предлагаемого изобретения является создание способа стабилизации монорельсовой РТ и устройства для его осуществления, обеспечивающих разгон ОИ на всей длине разгонного участка без увеличения крена.
Технический результат: уменьшение крена, повышение скорости разгона и точности доставки ОИ.
Поставленная задача решается тем, что по первому варианту заявляемого способа стабилизации монорельсовой РТ, включающему установку крыльев на противоположных боковых поверхностях ее стабилизирующего устройства в виде башмака, размещенного на рельсовой направляющей, в отличие от прототипа в ходе движения РТ по рельсовой направляющей изменяют площади воздействия набегающего потока на поверхность крыльев.
Поставленная задача решается также тем, что по первому варианту заявляемое стабилизирующее устройство монорельсовой РТ, содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, жестко закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, в отличие от прототипа снабжено дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ с собственной парой крыльев, жестко закрепленных на боковых поверхностях дополнительного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, дополнительный башмак установлен впереди основного башмака с возможностью опоры на его передний торец, при этом обе пары крыльев выполнены с треугольным поперечным сечением, ориентированы острым углом по направлению движения РТ, продольные плоскости симметрии крыльев лежат в одной параллельной направлению движения РТ плоскости, а высота h крыльев на основном башмаке выбрана из соотношения h=(1÷2)•b, где b - высота крыльев на дополнительном башмаке. Дополнительный башмак может быть выполнен с возможностью опоры на передний торец основного башмака через ролики, закрепленные с возможностью вращения на дополнительном башмаке при помощи осей, перпендикулярных направлению движения РТ.
Поставленная задача решается также тем, что по второму варианту заявляемое стабилизирующее устройство монорельсовой РТ, содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, жестко закрепленных с отрицательным углом атаки на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, в отличие от прототипа снабжено дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ с собственной парой крыльев с треугольным поперечным сечением, ориентированных острым углом по направлению движения РТ, жестко закрепленных на боковых поверхностях дополнительного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, дополнительный башмак установлен впереди основного башмака с возможностью опоры на его передний торец, крылья основного башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ, при этом их передние острые кромки расположены в одной параллельной направлению движения РТ плоскости, пересекающей крылья на дополнительном башмаке. Дополнительный башмак может быть выполнен с возможностью опоры на передний торец основного башмака через ролики, закрепленные с возможностью вращения на дополнительном башмаке при помощи осей, перпендикулярных направлению движения РТ.
Поставленная задача решается также тем, что по второму варианту заявляемого способа стабилизации монорельсовой РТ, включающему установку крыльев на противоположных боковых поверхностях ее стабилизирующего устройства в виде башмака, размещенного на рельсовой направляющей, в отличие от прототипа в ходе движения РТ по рельсовой направляющей изменяют углы атаки крыльев.
Поставленная задача решается также тем, что по третьему варианту заявляемое стабилизирующее устройство монорельсовой РТ, содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, в отличие от прототипа снабжено дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ, установленным впереди основного башмака с возможностью опоры на его передний торец, крылья основного башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ, закрепленных с возможностью независимого вращения с помощью осей, соосно установленных в корпус основного башмака перпендикулярно направлению движения РТ, на боковых поверхностях дополнительного башмака напротив друг друга жестко закреплены две вилки, а на каждом крыле впереди от его оси вращения закреплена дополнительная ось, связанная через скользящий по ней шаровой шарнир с вилкой, расположенной со стороны данного крыла. Дополнительный башмак может быть выполнен с возможностью опоры на передний торец основного башмака через ролики, закрепленные с возможностью вращения на дополнительном башмаке при помощи осей, перпендикулярных направлению движения РТ.
Поставленная задача решается также тем, что по четвертому варианту заявляемое стабилизирующее устройство монорельсовой РТ, содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, в отличие от прототипа снабжено дополнительным башмаком, установленным сзади основного башмака и соединенным с ним механической связью, исключающей продольное перемещение относительно основного башмака, крылья основного башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ и закрепленных с возможностью независимого вращения с помощью осей, соосно установленных в корпус основного башмака перпендикулярно направлению движения РТ, на боковых поверхностях дополнительного башмака напротив друг друга жестко закреплены две вилки, а на каждом крыле впереди от его оси вращения закреплена дополнительная ось, связанная через скользящий по ней шаровой шарнир с вилкой, расположенной со стороны данного крыла. Механическая связь, исключающая продольное перемещение башмаков относительно друг друга, может быть выполнена в виде буртика на поверхности дополнительного башмака с возможностью взаимодействия с роликом, закрепленным с возможностью вращения на основном башмаке при помощи оси, перпендикулярной направлению движения РТ.
Поставленная задача решается также тем, что по пятому варианту заявляемое стабилизирующее устройство монорельсовой РТ, содержащее жестко связанный с РТ башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, в отличие от прототипа дополнительно снабжено устройством определения крена РТ и шаговым двигателем с устройством управления, установленными на РТ, крылья башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ и закрепленных с возможностью вращения с помощью валов, соосно установленных в корпус башмака перпендикулярно направлению движения РТ, устройство определения крена РТ связано электрической связью с устройством управления шаговым двигателем, снабженным валом с коническим зубчатым колесом, выполненным с возможностью зубчатого зацепления с коническими зубчатыми колесами, установленными на валах крыльев.
Установка крыльев на противоположных боковых поверхностях стабилизирующего устройства РТ, выполненного в виде башмака, размещенного на рельсовой направляющей, изменение при крене РТ в ходе ее движения по РН площадей воздействия набегающего потока на поверхность крыльев приводит к возникновению разницы подъемной силы на крыльях и, соответственно, появлению восстанавливающего момента, который уменьшает крен, позволяет разогнать ОИ до максимальной скорости, обусловленной тяговооруженностью РТ, и повысить точность доставки ОИ (первый вариант заявляемого способа).
Выполнение стабилизирующего устройства монорельсовой РТ (первый вариант заявляемого устройства), содержащим жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, жестко закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, снабжение дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ с собственной парой крыльев, жестко закрепленных на боковых поверхностях дополнительного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, установка дополнительного башмака впереди основного башмака с возможностью опоры на его передний торец, выполнение при этом обеих пар крыльев с треугольным поперечным сечением, ориентированных острым углом по направлению движения РТ, а крепление их так, что продольные плоскости симметрии крыльев лежат в одной параллельной направлению движения РТ плоскости, позволяет при крене РТ получить восстанавливающий аэродинамический момент за счет изменения площадей воздействия набегающего потока на поверхность крыльев. Выбор высоты крыльев h на основном башмаке из соотношения h=(1÷2)•b, где b -высота крыльев на дополнительном башмаке, позволяет эффективно увеличивать обтекаемую площадь крыльев на основном башмаке. Только при h≥b любой крен приводит к выходу крыльев на основном башмаке из «тени» крыльев на дополнительном башмаке и появлению восстанавливающего момента. Это эффективно до h=2•b (в этом интервале создающая восстанавливающий момент обтекаемая площадь крыла удваивается: с одной стороны создающая восстанавливающий момент площадь крыла выходит из «тени», а с другой стороны создающая возмущающий момент площадь крыла уходит в «тень»). При h>2•b увеличивается только лобовое сопротивление, а увеличение восстанавливающего момента не происходит.
Выполнение стабилизирующего устройства монорельсовой РТ (второй вариант заявляемого устройства), содержащим жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, жестко закрепленных с отрицательным углом атаки на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, снабжение дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ с собственной парой крыльев, жестко закрепленных на боковых поверхностях дополнительного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, установка дополнительного башмака впереди основного башмака с возможностью опоры на его передний торец, выполнение крыльев основного башмака в виде пластин, заостренных спереди по ходу движения РТ, при этом их передние острые кромки располагают в одной параллельной направлению движения РТ плоскости, пересекающей крылья на дополнительном башмаке, позволяет при крене РТ получить восстанавливающий аэродинамический момент за счет изменения площадей воздействия набегающего потока на верхнюю поверхность крыльев основного башмака, которые в данном варианте одновременно за счет отрицательного угла атаки компенсируют подъемную силу РТ, обусловленную близко расположенной поверхностью ракетного трека.
Установка крыльев на противоположных боковых поверхностях стабилизирующего устройства РТ, выполненного в виде башмака, размещенного на рельсовой направляющей, изменение при крене РТ в ходе ее движения по РН углов атаки крыльев (увеличения со стороны крена и уменьшения с другой стороны) приводит к возникновению разницы подъемной силы на крыльях и, соответственно, появлению восстанавливающего момента, который уменьшает крен, позволяет разогнать ОИ до максимальной скорости, обусловленной тяговооруженностью РТ, и повысить точность доставки ОИ (второй вариант заявляемого способа).
Выполнение стабилизирующего устройства монорельсовой РТ (третий вариант заявляемого устройства), содержащим жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, жестко закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, снабжение дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ, установка дополнительного башмака впереди основного башмака с возможностью опоры на его передний торец, выполнение крыльев основного башмака в виде пластин, заостренных спереди по ходу движения РТ, закрепленных с возможностью независимого вращения с помощью осей, соосно установленных в корпус основного башмака перпендикулярно направлению движения РТ, жесткое закрепление на боковых поверхностях дополнительного башмака напротив друг друга двух вилок, а на каждом крыле впереди от его оси вращения дополнительной оси, связанной через скользящий по ней шаровой шарнир с вилкой, расположенной со стороны данного крыла позволяет при крене РТ получить восстанавливающий аэродинамический момент за счет увеличения угла атаки на крыле со стороны крена и уменьшения угла атаки на крыле с обратной стороны, соответственно.
Выполнение (первый, второй и третий вариант заявляемого устройства) дополнительного башмака с возможностью опоры на передний торец основного башмака через ролики, закрепленные с возможностью вращения на дополнительном башмаке при помощи осей, перпендикулярных направлению движения РТ, позволяет значительно уменьшить поперечную силу взаимодействия дополнительного башмака с основным и тем самым снизить уменьшение восстанавливающего момента этой силой.
Выполнение стабилизирующего устройства монорельсовой РТ (четвертый вариант заявляемого устройства), содержащим жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, снабжение дополнительным башмаком, установка дополнительного башмака сзади основного башмака и соединение с ним механической связью, исключающей продольное перемещение относительно основного башмака, выполнение крыльев основного башмака в виде пластин, заостренных спереди по ходу движения РТ, закрепленных с возможностью независимого вращения с помощью осей, соосно установленных в корпус основного башмака перпендикулярно направлению движения РТ, жесткое закрепление на боковых поверхностях дополнительного башмака напротив друг друга двух вилок, а на каждом крыле впереди от его оси вращения дополнительной оси, связанной через скользящий по ней шаровой шарнир с вилкой, расположенной со стороны данного крыла, позволяет при крене РТ получить восстанавливающий аэродинамический момент за счет увеличения угла атаки на крыле со стороны крена и уменьшения угла атаки на крыле с обратной стороны, соответственно.
Выполнение в этом варианте устройства механической связи, исключающей продольное перемещение башмаков относительно друг друга, виде буртика на поверхности дополнительного башмака с возможностью взаимодействия с роликом, закрепленным с возможностью вращения на основном башмаке при помощи оси, перпендикулярной направлению движения РТ, позволяет значительно уменьшить поперечную силу взаимодействия дополнительного башмака с основным и тем самым снизить уменьшение восстанавливающего момента этой силой.
Выполнение стабилизирующего устройства монорельсовой РТ (пятый вариант заявляемого устройства), содержащим жестко связанный с РТ башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, снабжение его дополнительно устройством определения крена РТ и шаговым двигателем с устройством управления, установленными на РТ, выполнение крыльев в виде пластин, заостренных спереди по ходу движения РТ и закрепленных с возможностью вращения с помощью валов, соосно установленных в корпус башмака перпендикулярно направлению движения РТ, связь устройства определения крена РТ электрической связью с устройством управления шаговым двигателем, снабжение его валом с коническим зубчатым колесом, выполненным с возможностью зубчатого зацепления с коническими зубчатыми колесами, установленными на валах крыльев, позволяет при крене РТ получить восстанавливающий аэродинамический момент за счет увеличения угла атаки на крыле со стороны крена и уменьшения угла атаки на крыле с обратной стороны, соответственно, при повороте вала шагового двигателя на угол, заданный устройством управления, в зависимости от величины крена, определенным устройством определения крена РТ. Изобретение поясняется чертежами:
- на фиг.1 и 2 изображены виды сбоку и спереди первого варианта устройства;
- на фиг.3 изображен вид сбоку основного и дополнительного башмаков в первом варианте устройства;
- на фиг.4 изображена роликовая опора дополнительного башмака на основной башмак в первом, втором и третьем вариантах устройства;
- на фиг.5-8 изображены виды сбоку и спереди основного и дополнительного башмаков с крыльями при крене РТ в первом и втором вариантах устройства;
- на фиг.9 изображен общий вид сбоку третьего варианта устройства;
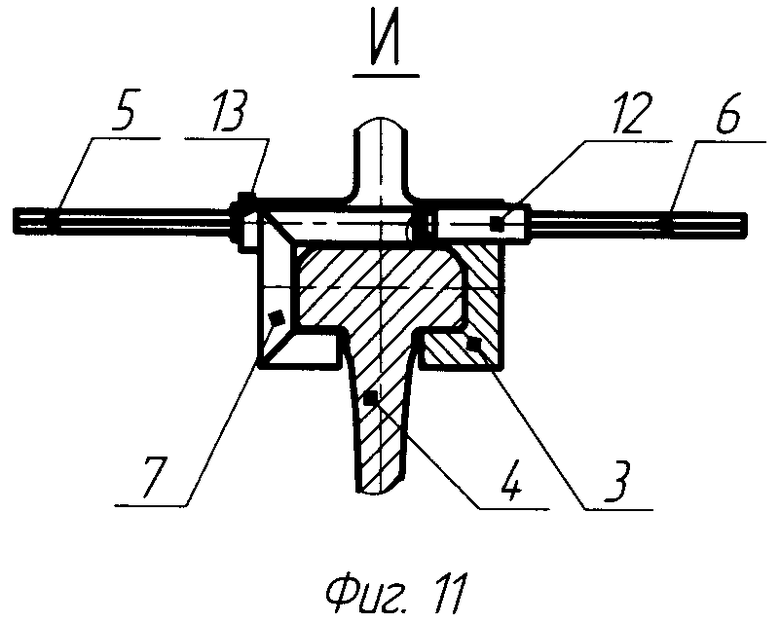
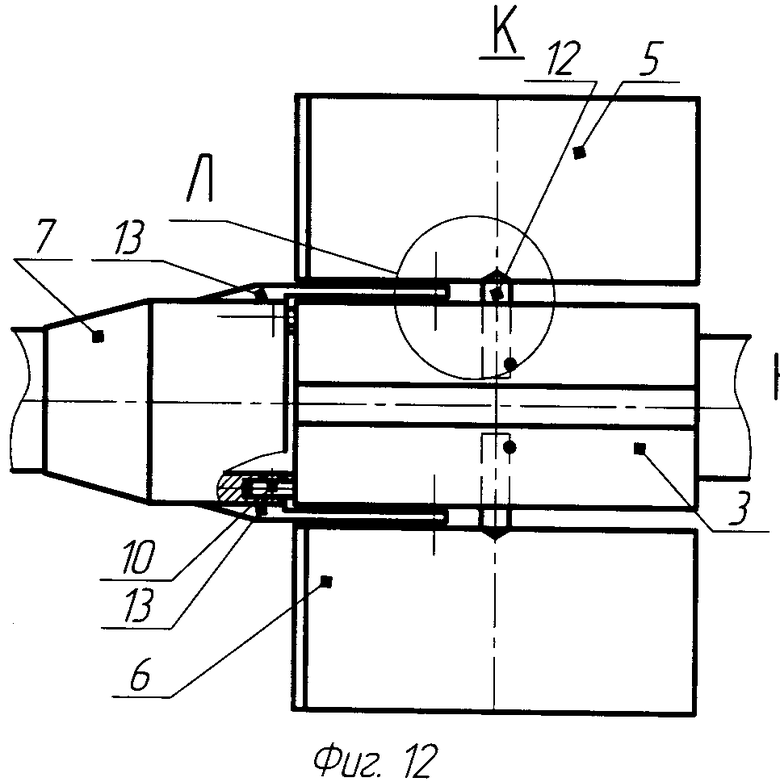
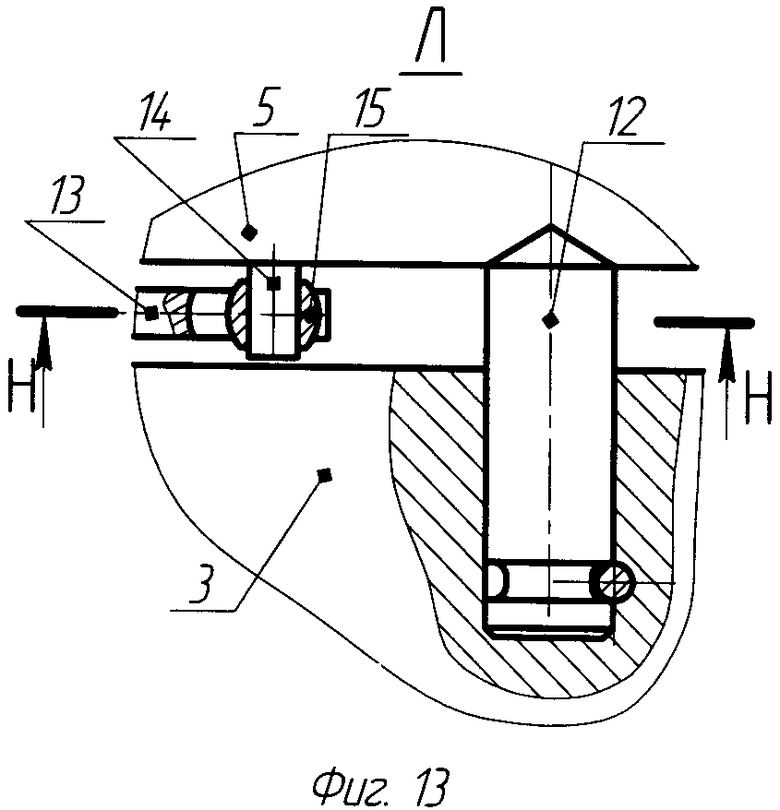
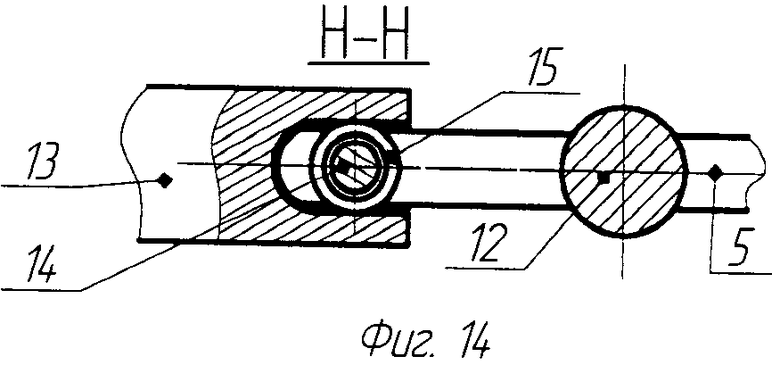
- на фиг.10-16 изображены виды сбоку, спереди и сверху основного и дополнительного башмаков, виды соединения крыла с вилкой с помощью шарового шарнира, виды сбоку и спереди дополнительного и основного башмаков при крене РТ в третьем варианте устройства;
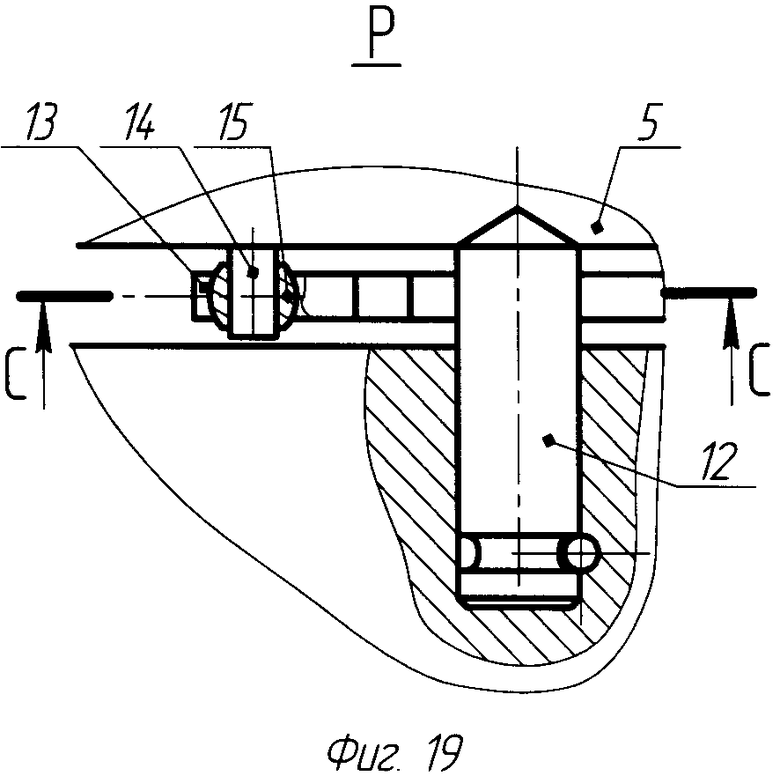
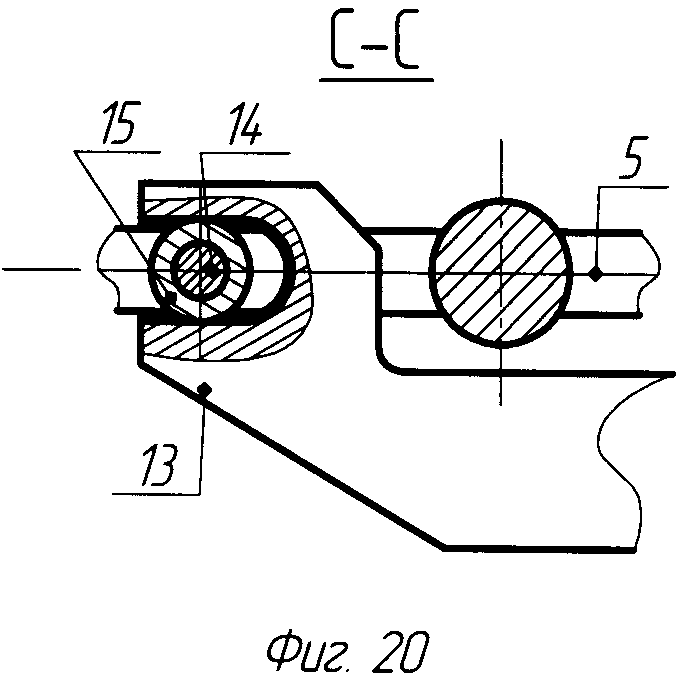
- на фиг.17-20 изображены виды сбоку и сверху основного и дополнительного башмаков, виды соединения крыла с вилкой с помощью шарового шарнира в четвертом варианте устройства;
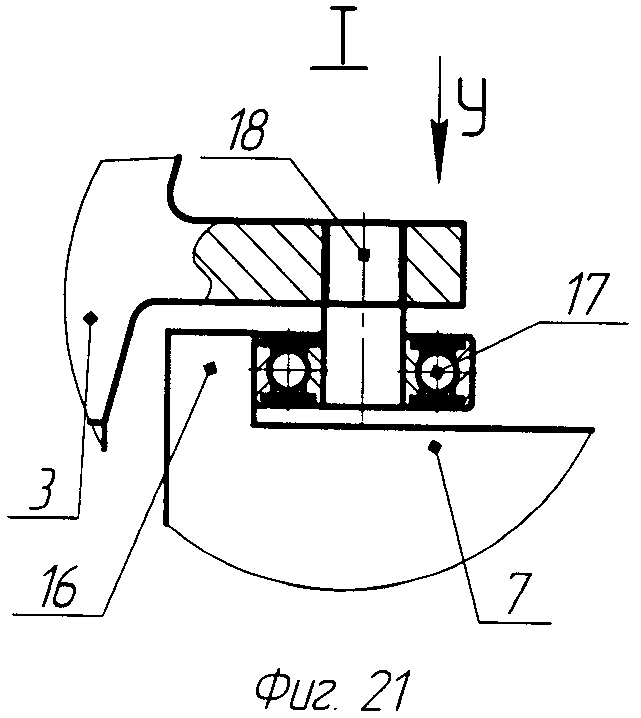
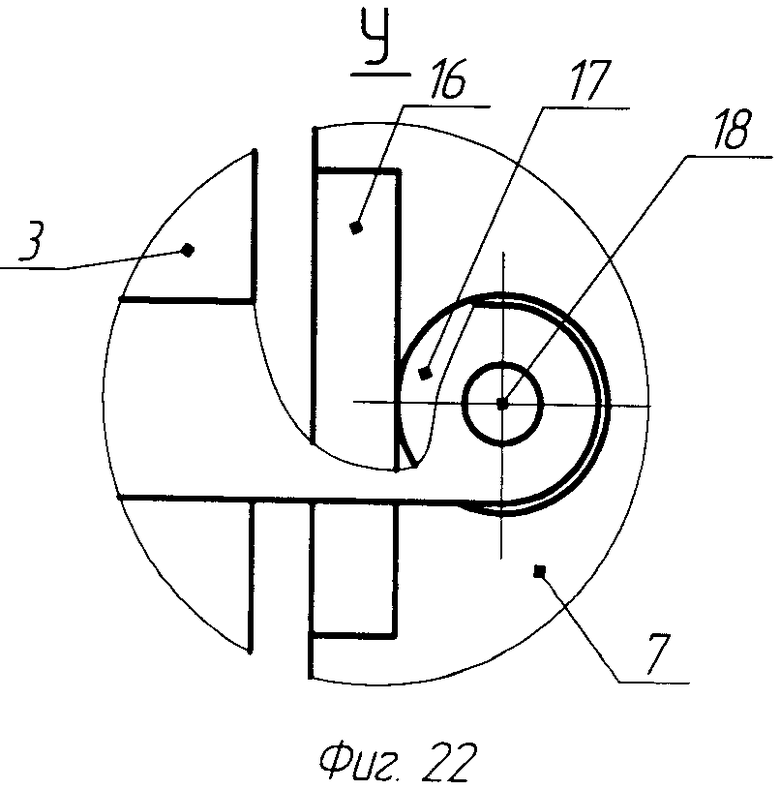
- на фиг.21 и 22 изображена механическая связь дополнительного башмака с основным в четвертом варианте устройства;
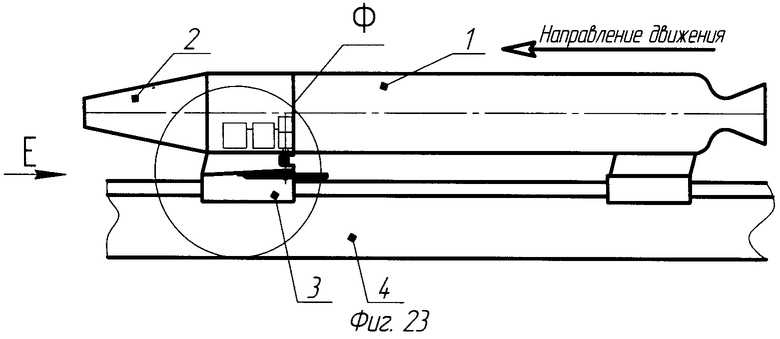
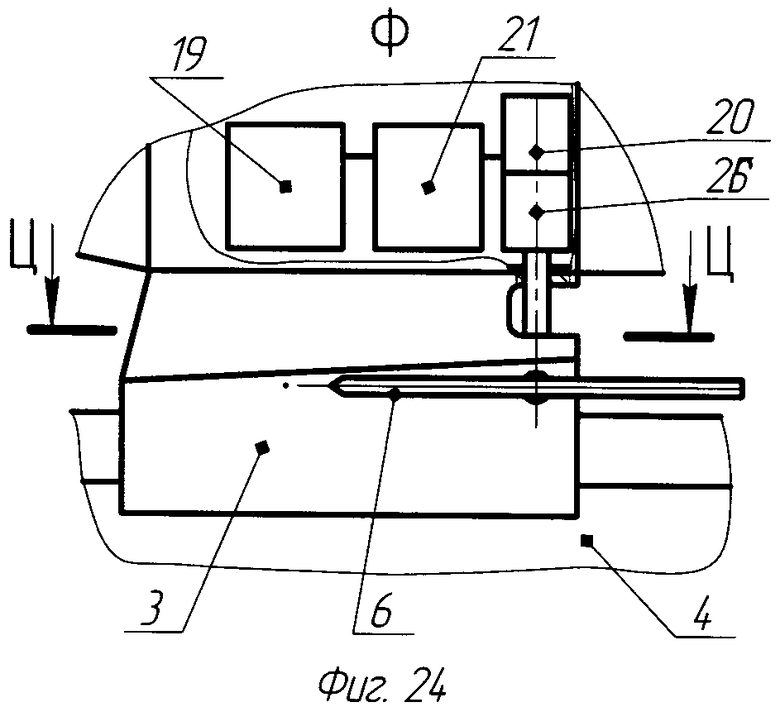
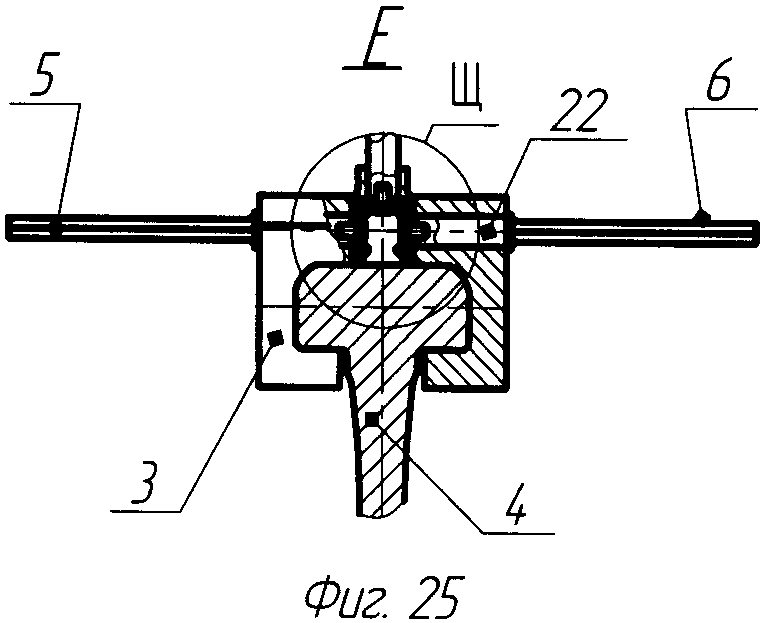
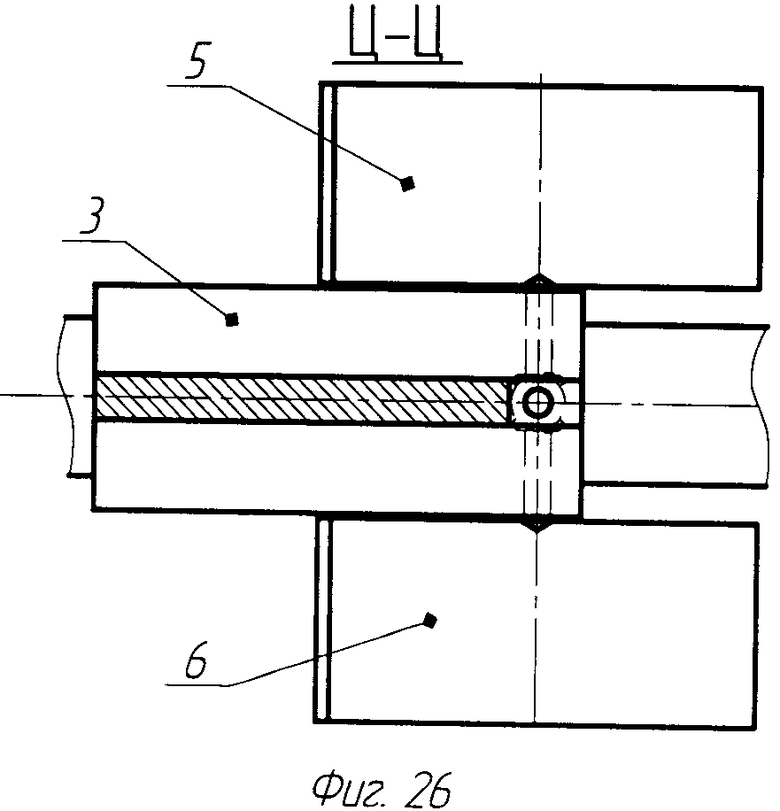
- на фиг.23-26 изображены общий вид, виды сбоку, спереди и сверху башмака с крыльями в пятом варианте устройства;
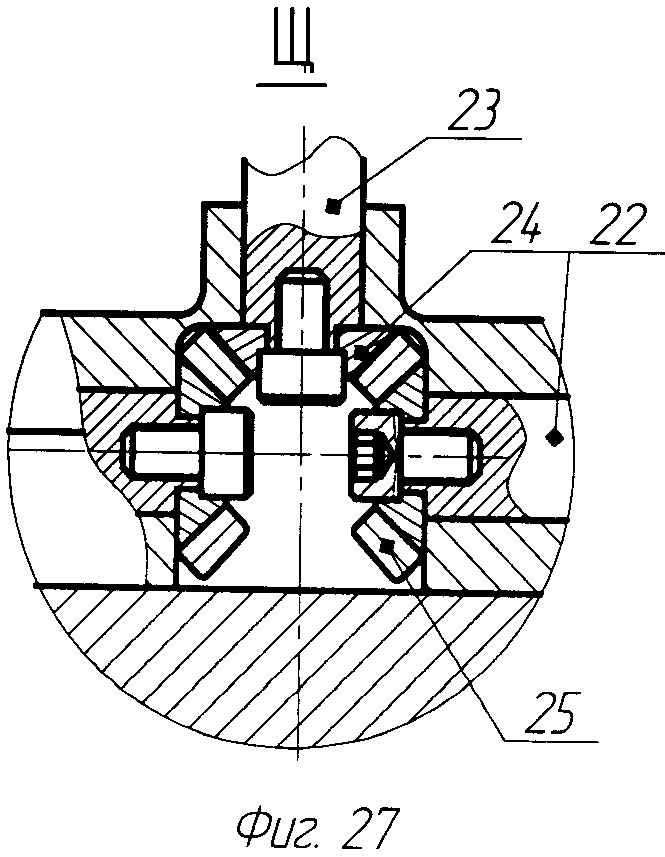
- на фиг.27 изображено зубчатое зацепление вала шагового двигателя с валами крыльев в пятом варианте устройства.
Стабилизирующее устройство монорельсовой РТ 1 (первый вариант) с разгоняемым объектом 2 содержит жестко связанный с РТ основной башмак 3, охватывающий головку рельсовой направляющей 4 ракетного трека (на фигуре не показан) с возможностью перемещения вдоль нее. На боковых поверхностях основного башмака 3, симметрично относительно вертикальной плоскости, проходящей через его продольную ось, жестко закреплены два крыла правое 5 и левое 6. Впереди основного башмака 3 с возможностью опоры на его передний торец установлен дополнительный башмак 7 с обтекаемой передней поверхностью по направлению движения РТ 1 с собственной парой крыльев (правое 8 и левое 9), жестко закрепленных на боковых поверхностях дополнительного башмака 7 симметрично относительно вертикальной плоскости, проходящей через его продольную ось. Обе пары крыльев выполнены с треугольным поперечным сечением, ориентированы острым углом по направлению движения РТ, продольные плоскости симметрии их лежат в одной параллельной направлению движения РТ плоскости. Высота h крыльев 5 и 6 на основном башмаке 3 выбрана из соотношения h=(1÷2)•b, где b - высота крыльев 8 и 9 на дополнительном башмаке 7. Дополнительный башмак 7 выполнен с возможностью опоры на передний торец основного башмака 3, в частности, через ролики 10, закрепленные с возможностью вращения на дополнительном башмаке 7 при помощи осей 11, перпендикулярных направлению движения РТ.
Стабилизирующее устройство монорельсовой РТ (второй вариант) с разгоняемым объектом 2 содержит жестко связанный с РТ 1 основной башмак 3, охватывающий головку рельсовой направляющей 4 ракетного трека (на фигуре не показан) с возможностью перемещения вдоль нее. На боковых поверхностях основного башмака 3 симметрично относительно вертикальной плоскости, проходящей через его продольную ось, с отрицательным углом атаки жестко закреплены два крыла правое 5 и левое 6. Впереди основного башмака 3 с возможностью опоры на его передний торец установлен дополнительный башмак 7 с обтекаемой передней поверхностью по направлению движения РТ 1 с собственной парой крыльев (правое 8 и левое 9) с треугольным сечением, жестко закрепленных на боковых поверхностях дополнительного башмака 7 симметрично относительно вертикальной плоскости, проходящей через его продольную ось. Крылья 5 и 6 основного башмака 3 выполнены в виде пластин, заостренных спереди по ходу движения РТ, их передние острые кромки расположены в одной параллельной направлению движения РТ плоскости, пересекающей крылья 8 и 9 на дополнительном башмаке 7. Дополнительный башмак 7 может быть выполнен с возможностью опоры на передний торец основного башмака 3 через ролики 10, закрепленные с возможностью вращения на дополнительном башмаке 7 при помощи осей 11, перпендикулярных направлению движения РТ 1.
Третий вариант стабилизирующего устройства монорельсовой РТ 1 с разгоняемым объектом 2 содержит жестко связанный с РТ основной башмак 3, охватывающий головку рельсовой направляющей 4 ракетного трека (на фигуре не показан) с возможностью перемещения вдоль нее. На боковых поверхностях основного башмака 3 симметрично относительно вертикальной плоскости, проходящей через его продольную ось, закреплены два крыла правое 5 и левое 6. Впереди основного башмака 3 с возможностью опоры на его передний торец установлен дополнительный башмак 7 с обтекаемой передней поверхностью по направлению движения РТ 1. Крылья 5 и 6 основного башмака 3 выполнены в виде пластин, заостренных спереди по ходу движения РТ, закрепленных с возможностью независимого вращения с помощью осей 12, соосно установленных в корпус основного башмака 3 перпендикулярно направлению движения РТ. На боковых поверхностях дополнительного башмака 7 напротив друг друга жестко закреплены две вилки 13, а на каждом крыле 5 и 6 впереди от его оси вращения закреплена дополнительная ось 14, связанная через скользящий по ней шаровой шарнир 15 с вилкой 13, расположенной со стороны данного крыла. Дополнительный башмак 7 может быть выполнен с возможностью опоры на передний торец основного башмака 3 через ролики 10, закрепленные с возможностью вращения на дополнительном башмаке 7 при помощи осей 11, перпендикулярных направлению движения РТ 1.
Четвертый вариант стабилизирующего устройства монорельсовой РТ 1 с разгоняемым объектом 2 содержит жестко связанный с РТ 1 основной башмак 3, охватывающий головку рельсовой направляющей 4 ракетного трека (на фигуре не показан) с возможностью перемещения вдоль нее. На боковых поверхностях основного башмака 3 симметрично относительно вертикальной плоскости, проходящей через его продольную ось, закреплены два крыла правое 5 и левое 6. Сзади основного башмака 3 установлен дополнительный башмак 7, соединенный с основным связью, исключающей продольное перемещение относительно основного башмака 3. Крылья 5 и 6 основного башмака 3 выполнены в виде пластин, заостренных спереди по ходу движения РТ 1, закрепленных с возможностью независимого вращения с помощью осей 12, соосно установленных в корпус основного башмака 3 перпендикулярно направлению движения РТ 1. На боковых поверхностях дополнительного башмака 7 напротив друг друга жестко закреплены две вилки 13, а на каждом крыле 5 и 6 впереди от его оси вращения 12 закреплена дополнительная ось 14, связанная через скользящий по ней шаровой шарнир 15 с вилкой 13, расположенной со стороны данного крыла. Механическая связь, исключающая продольное перемещение башмаков 3 и 7 относительно друг друга, может быть выполнена в виде буртика 16 на поверхности дополнительного башмака 7 с возможностью взаимодействия с роликом 17, закрепленным с возможностью вращения на основном башмаке 3 при помощи оси 18, перпендикулярной направлению движения РТ 1.
В пятом варианте выполнения стабилизирующее устройство монорельсовой РТ 1 с разгоняемым объектом 2 содержит жестко связанный с РТ башмак 3, охватывающий головку рельсовой направляющей 4 ракетного трека (на фигуре не показан) с возможностью перемещения вдоль нее. На боковых поверхностях башмака 3, симметрично относительно вертикальной плоскости, проходящей через его продольную ось, закреплены два крыла правое 5 и левое 6. Устройство дополнительно снабжено: устройством 19 определения крена РТ 1 (например, на основе гироскопа) и шаговым двигателем 20 с устройством управления им 21 с источником их питания (на фигуре не показан), установленными на РТ 1. Крылья 5, 6 башмака 3 выполнены в виде пластин, заостренных спереди по ходу движения РТ 1 и закрепленных с возможностью вращения с помощью валов 22, соосно установленных в корпус башмака 3 перпендикулярно направлению движения РТ. Устройство определения крена РТ 19 соединено электрической связью с устройством управления 21 шаговым двигателем 20. Шаговый двигатель 20 снабжен валом 23 с коническим зубчатым колесом 24, выполненным с возможностью зубчатого зацепления с коническими зубчатыми колесами 25, установленными на валах 22 крыльев 5 и 6. Шаговый двигатель 20 может быть снабжен редуктором 26.
Первый способ стабилизации монорельсовой ракетной тележки осуществляется при работе первого и второго вариантов устройства стабилизации монорельсовой РТ следующим образом.
РТ, как правило, размещают на РН при помощи двух разнесенных по длине РТ башмаков. Первый по ходу движения РТ башмак снабжен заявляемым стабилизирующим устройством. Перед проведением эксперимента для заданных массы и скорости ОИ 2, длины разгонного участка с учетом имеющихся типов ракетных двигателей определяют состав РТ 1 и ее массу. Выбирают минимальные зазоры между рельсовой направляющей и контактирующими с ними поверхностями башмаков, обеспечивающие свободный ход башмаков. Понятно, что для дополнительного башмака 7 они меньше, чем для двух основных башмаков 3, так как это обусловлено их разнесенным по ходу РТ 1 положением. Возможный крен дополнительного башмака 7 в поперечном направлении (относительно продольной оси головки РН 4) в пределах этих зазоров будет минимальным (10-14'), а крен РТ на разнесенных башмаках 3 (как показала практика с учетом реальной прямолинейности РН) будет составлять 1-1,5°. В зависимости от скорости разгона, массовых и центровочных характеристик выбирают параметры крыльев 8 и 9 на дополнительном башмаке и крыльев 5 и 6 на основном башмаке такими, чтобы восстанавливающий момент аэродинамических сил Мвосст при крене РТ 1 в пределах зазоров был больше суммы возмущающего момента весовых сил Мвозм и момента сил трения Мтр между башмаками 3 и 7 при вращении РТ 1 относительно продольной оси головки РН 4
Мвосст>Мвозм+Мтр.
Возмущающий момент от центробежной силы, возникающей в связи с кривизной РН в виде синусоиды в плане с амплитудой в пределах допуска, в данном соотношении не учитывается, так как он, исходя из прямолинейности РН на всей длине разгона ОИ, знакопеременен и поэтому результат его действия в основном самокомпенсируется. Этот возмущающий момент, вероятно, является причиной входа РТ в крен из номинального положения.
Далее запускают ракетный двигатель и разгоняют РТ 1 с ОИ 2 до заданной скорости. В ходе движения РТ 1 по РН 4 при крене РТ изменяют площади воздействия набегающего потока на поверхность крыльев 5 и 6. Например, при крене на правую сторону в первом варианте устройства нижняя поверхность правого крыла 5 выходит из «тени» в воздушный поток, а верхняя поверхность крыла 5 входит в «тень» крыла 8 (см. фиг.5 и 6). Подъемная сила F, действующая на крыло 5, направлена вверх. Слева, наоборот, верхняя поверхность крыла 6 выходит из «тени» крыла 9 в воздушный поток, а нижняя уходит в «тень» крыла 9. Подъемная сила F, действующая на крыло 6, направлена вниз. В итоге на РТ действует восстанавливающий момент Мвосст=2•F•c,
где: F- подъемная сила, действующая на крыло; с - расстояние от продольной оси головки РН 4 до точки приложения результирующей подъемной силы, действующая на крыло. Этот момент больше суммы возмущающего момента весовых сил
Мвозм=n•g•l,
где: m - масса РТ; g - ускорение свободного падения; l - расстояние от продольной оси головки РН 4 до центра масс РТ 1,
и момента сил трения между башмаками 3 и 7 при вращении РТ относительно продольной оси головки РН 4
Мтр=Р•f•а,
где: Р - сила взаимодействия башмаков 3 и 7; f - коэффициент трения в месте взаимодействия башмаков 3 и 7; а - расстояние от продольной оси головки РН 4 до места контакта башмаков 3 и 7 (см. фиг.4).
Под действием восстанавливающего момента крен прекращается, и РТ 1 возвращается в исходное положение. При крене РТ 1, например, в левую сторону, аналогично, возникает восстанавливающий момент.
Во втором варианте устройства за счет установки на основном башмаке 3 крыльев 5 и 6 с отрицательным углом атаки кроме устранения крена компенсируется подъемная сила, действующая на РТ 1 при движении по ракетному треку за счет эффекта близко расположенной поверхности ракетного трека. В данном устройстве при крене на правую сторону часть поверхности правого крыла 5 уходит в «тень» крыла 8, а слева часть поверхности левого крыла 6 выходит из «тени» крыла 9 в воздушный поток (см. фиг.8). Прижимающая сила F1, действующая на крыло 5 будет меньше прижимающей силы F2. В итоге на РТ 1 действует восстанавливающий момент Мвосст=F2•c2-F1•c1,
где: F1 и F2 - прижимающие силы, действующие на крылья 5 и 6, соответственно; c1 и c2 - расстояние от продольной оси головки РН 4 до точки приложения результирующих прижимающих сил, действующих на крылья 5 и 6, соответственно.
Этот момент больше суммы возмущающего момента весовых сил Мвозм и момента сил трения Мтр между башмаками 3 и 7 при вращении РТ. Под действием восстанавливающего момента крен прекращается, и ракетная тележка возвращается в исходное положение. При крене РТ 1, например, в левую сторону, аналогично, возникает восстанавливающий момент, кренящий РТ вправо.
Второй способ стабилизации монорельсовой ракетной тележки осуществляется при работе третьего, четвертого и пятого вариантов устройства стабилизации монорельсовой ракетной тележки следующим образом. РТ, как правило, размещают на РН при помощи двух разнесенных по длине РТ башмаков. Первый по ходу движения РТ башмак снабжен заявляемым стабилизирующим устройством. Перед проведением эксперимента, как и в первом способе, для заданных массы и скорости ОИ 2, длины разгонного участка с учетом имеющихся типов ракетных двигателей определяют состав РТ 1 и ее массу. Выбирают минимальные зазоры между рельсовой направляющей и контактирующими с ними поверхностями башмаков, обеспечивающие свободный ход башмаков. Понятно, что для дополнительного башмака 7 они меньше, чем для двух, разнесенных по ходу РТ 1, основных башмаков 3. Возможный крен дополнительного башмака 7 в поперечном направлении (относительно продольной оси головки РН 4) в пределах этих зазоров будет минимальным (10'÷15'), а крен РТ на разнесенных башмаках 3 (как показала практика с учетом реального положения РН) будет составлять 1-1,5º. В зависимости от скорости разгона и центровочных характеристик выбирают параметры крыльев 5 и 6 на основном башмаке и положение оси 14 шарового шарнира 15 относительно оси 12 вращения крыла такими, чтобы восстанавливающий момент аэродинамических сил Мвосст при крене РТ 1 в пределах зазоров был больше суммы возмущающего момента весовых сил Мвозм и момента сил трения между башмаками 3 и 7 при вращении РТ 1 относительно продольной оси головки РН 4-Мтр.
Мвосст>Мвозм+Мтр.
Запускают ракетный двигатель и разгоняют РТ 1 с ОИ 2 до заданной скорости. В ходе движения РТ по РН 4 при крене РТ 1 изменяют углы атаки крыльев. Например, при крене на правую сторону на угол β угол атаки α правого крыла 5 увеличивается за счет вращения его относительно оси 12 за ось 14 через шаровой шарнир 15 через вилку 13 дополнительным башмаком 7, который поворачивается относительно продольной оси головки РН 4 на меньший угол, чем основной башмак 3. При этом угол атаки левого крыла 5, наоборот, на столько же градусов уменьшается (см. фиг.15 и 16). Возможность скольжения шарового шарнира 15 в пазу вилки 13 и по оси 14 обеспечивает подвижную кинематическую связь дополнительного башмака 7 с крыльями 5 и 6 без заклинивания. Подъемная сила F, действующая на крыло 5, направлена вверх. Слева, наоборот, такая же сила F, действующая на крыло 6, направлена вниз. В итоге на РТ действует восстанавливающий момент Мвосст=2•F•c,
где: F - подъемная сила, действующая на крыло; с - расстояние от продольной оси головки РН 4 до лини действия результирующей подъемной силы на одном крыле.
Этот момент больше суммы возмущающего момента весовых сил
Мвозм=m•g•l,
где: m - масса РТ; g - ускорение свободного падения; l - расстояние от продольной оси головки РН 4 до центра масс РТ 1,
и момента сил трения между башмаками 3 и 7 при вращении РТ
Мтр..=Р•f•а,
где: Р - сила взаимодействия башмаков 3 и 7; f - коэффициент трения в месте взаимодействия башмаков 3 и 7; а - расстояние от продольной оси головки РН 4 до места контакта башмаков 3 и 7.
Следует отметить, что в третьем варианте заявляемого устройства восстанавливающий момент реализуется и при предварительной установке крыльев с отрицательным углом атаки. В этом случае при крене также изменяются углы: на одном угол увеличивается, а на другом уменьшается. Суммарный момент аэродинамических сил на крыльях при этом будет восстанавливающим. Под действием восстанавливающего момента устраняется крен, и ракетная тележка возвращается в исходное положение. При крене РТ, например, в левую сторону, аналогично, возникает восстанавливающий момент.
В четвертом варианте заявляемого устройства в отличие от третьего дополнительный башмак 7 расположен сзади основного башмака 3, на него не действует набегающий поток. Работает это устройство аналогично устройству по третьему варианту.
Выполнение механической связи основного башмака 3 с дополнительным 7 через ролики, в первых четырех вариантах заявляемого устройства, позволяет значительно уменьшить коэффициент трения f взаимодействия башмаков и, соответственно, момент трения Мтр. Это, в свою очередь, снижает уменьшение восстанавливающего момента и дает возможность решать поставленную задачу с меньшими габаритами крыльев и, соответственно, меньшей материалоемкостью.
В пятом варианте выполнения заявляемого устройства в зависимости от скорости разгона и центровочных характеристик выбирают параметры крыльев 5 и 6 на основном башмаке и зависимость величины установки их угла атаки от угла крена такими, чтобы восстанавливающий момент аэродинамических сил Мвосст при крене РТ 1 в пределах зазоров был больше суммы возмущающего момента весовых сил Мвозм. Запускают ракетный двигатель и разгоняют РТ 1 с ОИ 2 до заданной скорости. При крене РТ 1 устройство определения крена РТ 19 определяет его величину, по которой устройством управления 21 дает команду на поворот вала 23 с зубчатым колесом 24 шаговым двигателем 20 на определенный угол. При повороте зубчатого колеса 24, поворачиваются зубчатые колеса 25 с валами 22 и закрепленными на них крыльями 5 и 6. Например, при крене РТ на правую сторону, угол атаки правого крыла 5 увеличивают, а левого 6 уменьшают. Возникает восстанавливающий момент, который предотвращает дальнейшее развитие крена и возвращает РТ 1 в исходное положение. В данном устройстве, как и в 2÷4 вариантах заявляемого устройства, восстанавливающий момент реализуется и при предварительной установке крыльев с отрицательным углом атаки.
Таким образом, предложенные варианты способа стабилизации монорельсовой ракетной тележки и варианты устройства для их осуществления, по сравнению с прототипами, позволяют уменьшить величину крена и, соответственно, увеличить скорость разгона и точность доставки ОИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ МОНОРЕЛЬСОВОЙ РАКЕТНОЙ ТЕЛЕЖКИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2532212C1 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| ЭКРАНОПЛАН "RUSWIND" (ВАРИАНТЫ) | 1997 |
|
RU2140370C1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК СВАЛИВАНИЯ И ШТОПОРА САМОЛЕТА (ВАРИАНТЫ) | 2005 |
|
RU2297364C1 |
| ПОДВОДНЫЙ ПЛАНЕР (ВАРИАНТЫ) | 2012 |
|
RU2490164C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И СПОСОБ ЕГО СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2005 |
|
RU2334656C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ), ВЗЛЕТНО-ПОСАДОЧНОЕ ШАССИ (ВАРИАНТЫ) И СПОСОБ ПОДЪЕМА В ВОЗДУХ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2012 |
|
RU2588198C2 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
| Штурмовик /варианты/ | 2016 |
|
RU2623638C1 |

Изобретение относится к пусковым установкам, а именно к испытательным стендам. Стабилизирующее устройство монорельсовой ракетной тележки (РТ) содержит основной башмак с собственной парой крыльев в виде пластин и возможностью охвата рельсовой направляющей и перемещения вдоль нее, два крыла, дополнительный башмак с обтекаемой передней поверхностью и собственной парой крыльев, выполненных с треугольным поперечным сечением. Дополнительный башмак расположен впереди основного башмака. Геометрию и расположение крыльев основного и дополнительного башмака выбирают в зависимости от площади взаимодействия набегающего потока и угла атаки. Изобретение позволяет обеспечить разгон объекта испытания (ракеты) на всей длине разгонного участка без увеличения крена. 7 н. и 4 з.п. ф-лы, 27 ил.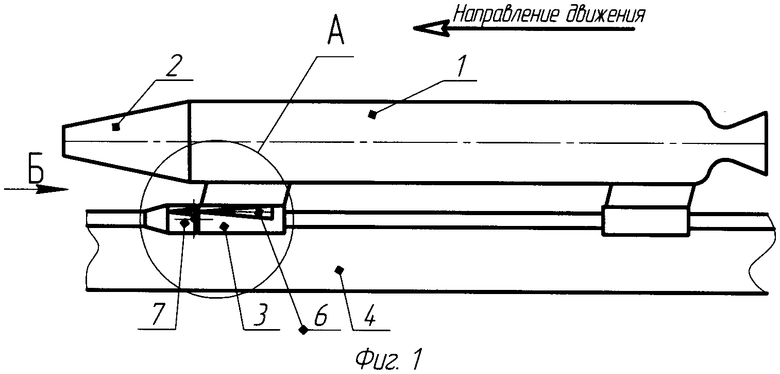
1. Способ стабилизации монорельсовой ракетной тележки (РТ), включающий установку крыльев на противоположных боковых поверхностях ее стабилизирующего устройства в виде башмака, размещенного на рельсовой направляющей, отличающийся тем, что в ходе движения РТ по рельсовой направляющей изменяют площади воздействия набегающего потока на поверхность крыльев.
2. Способ стабилизации монорельсовой ракетной тележки (РТ), включающий установку крыльев на противоположных боковых поверхностях ее стабилизирующего устройства в виде башмака, размещенного на рельсовой направляющей, отличающийся тем, что в ходе движения РТ по рельсовой направляющей изменяют углы атаки крыльев.
3. Стабилизирующее устройство монорельсовой ракетной тележки (РТ), содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, жестко закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, отличающееся тем, что снабжено дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ с собственной парой крыльев, жестко закрепленных на боковых поверхностях дополнительного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, дополнительный башмак установлен впереди основного башмака с возможностью опоры на его передний торец, при этом обе пары крыльев выполнены с треугольным поперечным сечением, ориентированы острым углом по направлению движения РТ, продольные плоскости симметрии крыльев лежат в одной параллельной направлению движения РТ плоскости, а высота h крыльев на основном башмаке выбрана из соотношения
h=(1÷2)·b,
где b - высота крыльев на дополнительном башмаке.
4. Стабилизирующее устройство монорельсовой ракетной тележки по п.3, отличающееся тем, что дополнительный башмак выполнен с возможностью опоры на передний торец основного башмака через ролики, закрепленные с возможностью вращения на дополнительном башмаке при помощи осей, перпендикулярных направлению движения РТ.
5. Стабилизирующее устройство монорельсовой ракетной тележки (РТ), содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, жестко закрепленных с отрицательным углом атаки на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, отличающееся тем, что снабжено дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ с собственной парой крыльев с треугольным поперечным сечением, ориентированных острым углом по направлению движения РТ, жестко закрепленных на боковых поверхностях дополнительного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, дополнительный башмак установлен впереди основного башмака с возможностью опоры на его передний торец, крылья основного башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ, при этом их передние острые кромки расположены в одной параллельной направлению движения РТ плоскости, пересекающей крылья на дополнительном башмаке.
6. Стабилизирующее устройство монорельсовой ракетной тележки по п.5, отличающееся тем, что дополнительный башмак выполнен с возможностью опоры на передний торец основного башмака через ролики, закрепленные с возможностью вращения на дополнительном башмаке при помощи осей, перпендикулярных направлению движения РТ.
7. Стабилизирующее устройство монорельсовой ракетной тележки (РТ), содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, отличающееся тем, что снабжено дополнительным башмаком с обтекаемой передней поверхностью по направлению движения РТ, установленным впереди основного башмака с возможностью опоры на его передний торец, крылья основного башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ, закрепленных с возможностью независимого вращения с помощью осей, соосно установленных в корпус основного башмака перпендикулярно направлению движения РТ, на боковых поверхностях дополнительного башмака напротив друг друга жестко закреплены две вилки, а на каждом крыле впереди от его оси вращения закреплена дополнительная ось, связанная через скользящий по ней шаровой шарнир с вилкой, расположенной со стороны данного крыла.
8. Стабилизирующее устройство монорельсовой ракетной тележки по п.7, отличающееся тем, что дополнительный башмак выполнен с возможностью опоры на передний торец основного башмака через ролики, закрепленные с возможностью вращения на дополнительном башмаке при помощи осей, перпендикулярных направлению движения РТ.
9. Стабилизирующее устройство монорельсовой ракетной тележки (РТ), содержащее жестко связанный с РТ основной башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях основного башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось отличающееся тем, что снабжено дополнительным башмаком, установленным сзади основного башмака и соединенным с ним механической связью, исключающей продольное перемещение относительно основного башмака, крылья основного башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ и закрепленных с возможностью независимого вращения с помощью осей, соосно установленных в корпус основного башмака перпендикулярно направлению движения РТ, на боковых поверхностях дополнительного башмака напротив друг друга жестко закреплены две вилки, а на каждом крыле впереди от его оси вращения закреплена дополнительная ось, связанная через скользящий по ней шаровой шарнир с вилкой, расположенной со стороны данного крыла.
10. Стабилизирующее устройство монорельсовой ракетной тележки по п.9, отличающееся тем, что механическая связь, исключающая продольное перемещение башмаков относительно друг друга, выполнена виде буртика на поверхности дополнительного башмака с возможностью взаимодействия с роликом, закрепленным с возможностью вращения на основном башмаке при помощи оси, перпендикулярной направлению движения РТ.
11. Стабилизирующее устройство монорельсовой ракетной тележки (РТ), содержащее жестко связанный с РТ башмак, охватывающий головку рельсовой направляющей с возможностью перемещения вдоль нее, два крыла, закрепленных на боковых поверхностях башмака симметрично относительно вертикальной плоскости, проходящей через его продольную ось, отличающееся тем, что дополнительно снабжено устройством определения крена РТ и шаговым двигателем с устройством управления, установленными на РТ, крылья башмака выполнены в виде пластин, заостренных спереди по ходу движения РТ и закрепленных с возможностью вращения с помощью валов, соосно установленных в корпус башмака перпендикулярно направлению движения РТ, устройство определения крена РТ связано электрической связью с устройством управления шаговым двигателем, снабженным валом с коническим зубчатым колесом, выполненным с возможностью зубчатого зацепления с коническими зубчатыми колесами, установленными на валах крыльев.
| Устройство для крепления монорельса | 1982 |
|
SU1049668A1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НАВЕСНОГО ТИПА | 1999 |
|
RU2145557C1 |
| ТРАНСПОРТНАЯ СИСТЕМА "ТРАНСПОРТ-МОНОРЕЛЬС-ТЕТРАЭДР" | 2007 |
|
RU2374102C2 |
| US 20060032986 A1, 16.02.2006 | |||
| US 6321657 B1, 27.11.2001. | |||

