ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область применения изобретения
Настоящее изобретение относится к области технологий диагностики рельсов, а в частности, к способу определения места повреждения изоляции откаточного рельса в туннеле/угольной шахте.
Описание предшествующего уровня техники
В транспортной системе, такой как угольная шахта или туннель, в которых используется тяговый локомотив постоянного тока, этот тяговый локомотив является одним из основных транспортных устройств, необходимых для производства и эксплуатации. Во время движения тягового локомотива постоянного тока по откаточному рельсу, тяговый ток передается с положительного электрода подстанции через воздушную линию электропередачи туннеля и питающую линию и возвращается к отрицательному электроду подстанции через откаточный рельс. Поэтому, когда происходит повреждение изоляции откаточного рельса, происходит утечка части тягового тока с места повреждения изоляции, образуя блуждающий ток в стволе угольной шахты или в туннеле. В число опасностей при возникновении блуждающих токов в угольных шахтах в основном входят: запуск преждевременного взрыва электродетонатора, который приводит к взрывам пыли и газа в шахте, коррозия металлических корпусов подземных металлических труб и армированных кабелей в угольной шахте и влияние на нормальную работу подземного электрооборудования в угольной шахте. Блуждающий ток в туннеле электрохимически разъедает арматурные стальные стержни в строительных конструкциях, металлических корпусах оборудования и других подземных металлических трубопроводах, что отрицательно сказывается на сроке службы строительных конструкций, оборудования и других металлических трубопроводов.
В транспортной системе, такой как угольная шахта или туннель, в которых используется тяговый локомотив постоянного тока, в случае, если локомотив питается только от одной подстанции, такой режим питания называется односторонним режимом питания одного локомотива. Чтобы обеспечить безопасную и стабильную работу системы угольной шахты, системы туннеля или в аналогичных системах, крайне важно своевременно обнаружить место повреждения изоляции откаточного рельса, чтобы радикальным образом предотвратить образование блуждающего тока. Таким образом, необходимо срочно найти способ точного определения расположение места повреждения откаточного рельса при одностороннем режиме питания одного локомотива. Однако в настоящее время в этой области были проведены только первоначальные исследования. Способ определения места повреждения изоляции откаточного рельса, основанный на решении в форме бегущей волны С (Лю Цзяньхуа и соавт., Городской общественный транспорт, 2015.09 (LIU Jianhua, et al., Urban Mass Transit, 2015.09)), найден путем поиска в существующей литературе. В этом способе сигнал бегущей волны необходимо подавать на откаточный рельс, в котором произошло повреждение изоляции. Сигнал бегущей волны отражается в месте повреждения изоляции, возвращаясь на место подачи сигнала. Место повреждения изоляции определяется в соответствии со временем, которое уходит на прохождение сигналом туда и обратно между местом подачи и местом повреждения изоляции, а также скоростью сигнала бегущей волны. Возможность технической реализации и точность этого способа проверяются только при помощи моделирования и подлежать проверке в ходе дальнейшей инженерной практики.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель изобретения
Ввиду вышеизложенной проблемы настоящее изобретение обеспечивает способ определения места повреждения изоляции откаточного рельса в туннеле/угольной шахте и его переходного сопротивления. В способе, согласно концепции изобретения, потенциал находящийся на откаточном рельсе, подключенному к отрицательному электроду подстанции, скачет вовремя движения тягового локомотива постоянного тока мимо места повреждения изоляции откаточного рельса, а место повреждения изоляции откаточного рельса непосредственно, просто и точно определяется в режиме реального времени во время работы. Принцип и концепция обнаружения оригинальны, с простой конструкцией системы обнаружения и приемлемыми затратами. Настоящее изобретение в особенности подходит к области применения, как угольная шахта или туннель, в которых используется тяговый локомотив постоянного тока.
Техническое решение
Для достижения цели настоящего изобретения техническое решение, принятое в настоящем изобретении, представляет собой способ определения места повреждения изоляции откаточного рельса в туннеле/угольной шахте и его переходного сопротивления, включая:
S1: подсоединение откаточного рельса 1 к отрицательному электроду подстанции 2 при помощи кабеля и выбор местоположения 11 в точке соединения в качестве места проверки;
S2: установка устройства обнаружения потенциалов 3 в месте проверки, выбранном на этапе S1, и получение данных потенциалов в месте проверки на текущий момент; в тоже время установка устройства определения пройденного расстояния 5 и устройства определения тягового тока 6 на локомотиве 4, для получения данных о пройденном расстоянии и данных тягового тока локомотива 4 на текущий момент соответственно;
S3: движение локомотива 4 к подстанции 2 по откаточному рельсу 1, во время движения используются устройство обнаружения потенциалов 3, устройство определения пройденного расстояния 5 и устройство определения тягового тока 6 и непрерывно собираются данные о потенциалах, данные о пройденном расстоянии и данные тягового тока соответственно, где частота выборки равна 1000 Гц, под контролем блока управления 7, синхронизируется время исследования устройства обнаружения потенциалов 3, устройства определения пройденного расстояния 5 и устройства определения тягового тока 6 и отправляются полученные данные при помощи устройства обнаружения потенциалов 3, устройства определения пройденного расстояния 5 и устройства определения тягового тока 6 в блок управления 7 соответственно путем беспроводной связи;
S4: движение локомотива 4 до места проверки и остановка, а также завершение сбора данных устройством обнаружения потенциалов 3, устройством определения пройденного расстояния 5 и устройством определения тягового тока 6 и остановка работы; распознавание блоком управления 7 согласно правилу, при котором скачок потенциала возникает, если изменение потенциала между соседними интервалами выборки превышает предварительно установленное значение, скачок потенциала и соответствующее время скачка из принятых данных о потенциалах, где заранее установленное значение может быть установлено в соответствии с фактическим требованием; учитывая что устройство обнаружения потенциалов 3 и устройство определения пройденного расстояния 5 имеют синхронное время обнаружения, заданное блоком управления 7, а данные о пройденном расстоянии, полученные устройством определения пройденного расстояния 5 во время движения локомотива 4 к месту проверки принимаются в виде общей длины L1 пройденного расстояния локомотивом 4; определение пройденного расстояния L2 локомотивом 4 в момент скачка из полученных данных о пройденном расстоянии и использование значения разности между общей длиной движения L1 и пройденным расстоянием L2 в виде расстояния L между местом повреждения изоляции 12 откаточного рельса 1 и местом проверки, а именно L = L1 − L2, для установления места повреждения изоляции откаточного рельса 1; а также
S5: определение блоком управления 7 тягового тока локомотива 4 в момент скачка согласно полученным текущим данным о тяговом токе и определения тягового тока, в виде I, определение потенциала в месте проверки из полученных данных о потенциалах в момент скачка, и определение потенциала в виде V.
Локомотив 4 является тяговым локомотивом постоянного тока.
Устройство обнаружения потенциалов 3 состоит из модуля передачи напряжения, модуля сбора данных и модуля беспроводной связи; место проверки соединено с модулем передачи напряжения кабелем для передачи сигналов; модуль передачи напряжения преобразует сигнал потенциала с места проверки в соответствии с типом данных и диапазоном, которые допускаются модулем сбора данных, а модуль сбора данных получает и обрабатывает преобразованные данные, а затем отправляет их в блок управления 7 при помощи модуля беспроводной связи.
Устройство определения пройденного расстояния 5 состоит из датчика угла поворота, программируемого контроллером, и модуля беспроводной связи; датчик угла поворота установлен на колесной оси локомотива 4; датчик угла поворота преобразует сигнал скорости локомотива 4 в ряд высокочастотных импульсов, которые регистрируются высокоскоростным счетчиком программируемого контроллера; количество высокочастотных импульсов, генерируемых, во время одного оборота вращения колеса и окружность колеса являются известными величинами и программируемый контроллер вычисляет количество оборотов колеса локомотива 4, используя произведение при умножении количества оборотов на длину окружности, в качестве пройденного расстояния локомотивом 4, и отправляет это пройденное расстояние на блок управления 7 при помощи модуля беспроводной связи.
Устройство определения тягового тока 6 включает в себя оптоволоконный трансформатор тока и модуль беспроводной связи, где оптоволоконный трансформатор тока определяет тяговый ток локомотива 4 и отправляет его на блок управления 7 при помощи модуля беспроводной связи.
Полезный эффект изобретения
Если сравнивать с предшествующим уровнем техники, то при помощи способа настоящего изобретения, заключающемся в определении места повреждения изоляции откаточного рельса в туннеле/угольной шахте и его переходного сопротивления и согласно концепции этого изобретения, потенциал находящийся на откаточном рельсе, подключенному к отрицательному электроду подстанции, скачет вовремя прохождения тягового локомотива постоянного тока мимо места повреждения изоляции откаточного рельса, а место повреждения изоляции откаточного рельса непосредственно, просто и точно определяется в режиме реального времени во время работы. Помимо этого, система обнаружения, выстроенная в настоящем изобретении, имеет простую структуру, обеспечивает быстрое размещение, предусматривает приемлемые затраты, дает результаты обнаружения с четкими и очевидными характеристиками и в особенности подходит к области применения, как угольная шахта или туннель, в которых используется тяговый локомотив постоянного тока.
КРАТКОЕ ОПИСАНИЕ СХЕМ
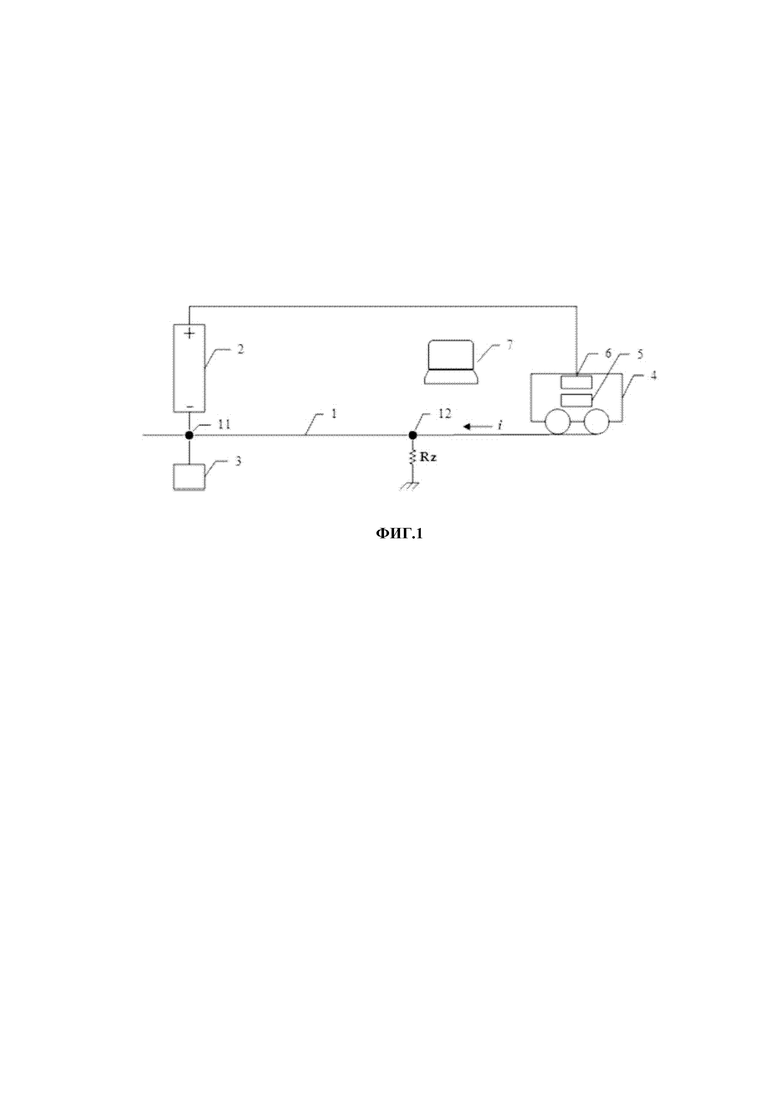
ФИГ. 1 представляет собой схему режима питания до прохождения локомотивом места повреждения изоляции в соответствии с настоящим изобретением.
Где: 1-откаточный рельс, 2-подстанция, 3-устройство обнаружения потенциалов, 4-локомотив, 5-устройство определения пройденного расстояния, 6-устройство определения тягового тока, 7-блок управления, 11-место проверки и 12-место повреждения изоляции.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Технические решения по настоящему изобретению дополнительно описаны ниже со ссылкой на прилагаемые схемы и варианты осуществления.
Способ определения места повреждения изоляции откаточного рельса в туннеле/ угольной шахте и его переходного сопротивления в настоящем изобретении показан на ФИГ. 1. Способ включает в себя конкретные меры:
S1: подсоединение откаточного рельса 1 к отрицательному электроду подстанции 2 при помощи кабеля и выбор местоположения 11 в точке соединения в качестве места проверки;
S2: установка устройства обнаружения потенциалов 3 в месте проверки, выбранном на этапе S1, и получение данных потенциалов в месте проверки на текущий момент; в тоже время установка устройства определения пройденного расстояния 5 и устройства определения тягового тока 6 на локомотиве 4, для получения данных о пройденном расстоянии и данных тягового тока локомотива 4 на текущий момент соответственно;
S3: движение локомотива 4 к подстанции 2 по откаточному рельсу 1, во время движения используются устройство обнаружения потенциалов 3, устройство определения пройденного расстояния 5 и устройство определения тягового тока 6 и непрерывно собираются данные о потенциалах, данные о пройденном расстоянии и данные тягового тока соответственно, где частота выборки равна 1000 Гц, под контролем блока управления 7, синхронизируется время исследования устройства обнаружения потенциалов 3, устройства определения пройденного расстояния 5 и устройства определения тягового тока 6 и отправляются полученные данные при помощи устройства обнаружения потенциалов 3, устройства определения пройденного расстояния 5 и устройства определения тягового тока 6 в блок управления 7 соответственно путем беспроводной связи;
S4: движение локомотива 4 до места проверки и остановка, а также завершение сбора данных устройством обнаружения потенциалов 3, устройством определения пройденного расстояния 5 и устройством определения тягового тока 6 и остановка работы; распознавание блоком управления 7 согласно правилу, при котором скачок потенциала возникает, если изменение потенциала между соседними интервалами выборки превышает предварительно установленное значение, скачок потенциала и соответствующее время скачка из принятых данных о потенциалах, где заранее установленное значение может быть установлено в соответствии с фактическим требованием, к примеру, заранее установленное значение равное 1В; учитывая что устройство обнаружения потенциалов 3 и устройство определения пройденного расстояния 5 имеют синхронное время обнаружения, а, заданные блоком управления 7, данные о пройденном расстоянии, полученные устройством определения пройденного расстояния 5 во время движения локомотива 4 к месту проверки принимаются в виде общей длины L1 пройденного расстояния локомотивом 4; определение пройденного расстояния L2 локомотивом 4 в момент скачка из полученных данных о пройденном расстоянии и использование значения разности между общей длиной движения L1 и пройденным расстоянием L2 в виде расстояния L между местом повреждения изоляции 12 откаточного рельса 1 и местом проверки, а именно L = L1 − L2, для установления места повреждения изоляции откаточного рельса 1; а также
S5: определение блоком управления 7 тягового тока локомотива 4 в момент скачка согласно полученным текущим данным о тяговом токе и определения тягового тока, в виде I, определение потенциала в месте проверки из полученных данных о потенциалах в момент скачка, и определение потенциала в виде V.
Локомотив 4 является тяговым локомотивом постоянного тока.
Устройство обнаружения потенциалов 3 состоит из модуля передачи напряжения, модуля сбора данных и модуля беспроводной связи; место проверки соединено с модулем передачи напряжения кабелем для передачи сигналов; модуль передачи напряжения преобразует сигнал потенциала с места проверки в соответствии с типом данных и диапазоном, которые допускаются модулем сбора данных, а модуль сбора данных получает и обрабатывает преобразованные данные, а затем отправляет их в блок управления 7 при помощи модуля беспроводной связи.
Устройство определения пройденного расстояния 5 состоит из датчика угла поворота, программируемого контроллером, и модуля беспроводной связи; датчик угла поворота установлен на колесной оси локомотива 4; датчик угла поворота преобразует сигнал скорости локомотива 4 в ряд высокочастотных импульсов, которые регистрируются высокоскоростным счетчиком программируемого контроллера; количество высокочастотных импульсов, генерируемых, во время одного оборота вращения колеса и окружность колеса являются известными величинами и программируемый контроллер вычисляет количество оборотов колеса локомотива 4, используя произведение при умножении количества оборотов на длину окружности, в качестве пройденного расстояния локомотивом 4, и отправляет это пройденное расстояние на блок управления 7 при помощи модуля беспроводной связи.
Устройство определения тягового тока 6 включает в себя оптоволоконный трансформатор тока и модуль беспроводной связи, где оптоволоконный трансформатор тока определяет тяговый ток локомотива 4 и отправляет его на блок управления 7 при помощи модуля беспроводной связи.
Вышеизложенное обеспечивает только лучшие варианты осуществления настоящего изобретения, но не направлены на ограничение настоящего изобретения в какой-либо форме. Все другие варианты осуществления, полученные специалистом в данной области техники на основе вариантов осуществления настоящего изобретения без применения творческих усилий, относятся к объему правовой охраны настоящего изобретения. Любая простая модификация или эквивалентное изменение, внесенное в предшествующие варианты осуществления в соответствии с технической сущностью настоящего изобретения, относятся к объему правовой охраны настоящего изобретения.
Изобретение относится к контролю изоляции откаточного рельса в туннеле или угольной шахте и определению его переходного сопротивления. Сущность: подсоединяют откаточный рельс к отрицательному электроду подстанции. Выбирают местоположение в точке соединения в качестве места проверки. Устанавливают устройство обнаружения потенциалов в месте проверки. Устанавливают устройство определения пройденного расстояния и устройство определения тягового тока локомотива. Локомотив движется к подстанции по откаточному рельсу. Собираются данные о потенциалах, о пройденном расстоянии и данные тягового тока, которые передают в блок управления. Блок управления определяет скачок потенциала на основании принятых данных о потенциале, соответствующем времени скачка, и расстояние пробега локомотива в момент скачка, а также общую длину пробега локомотива, чтобы определить повреждение изоляции заземления. Технический результат: непосредственное и легкое определение места повреждения изоляции заземления откаточного рельса в режиме реального времени во время работы, простота конструкции системы обнаружения. 4 з.п. ф-лы, 1 ил.
1. Способ определения места повреждения изоляции откаточного рельса в туннеле/угольной шахте, при этом способ содержит следующие этапы:
S1: подсоединение откаточного рельса (1) к отрицательному электроду подстанции (2) при помощи кабеля и выбор местоположения (11) в точке соединения в качестве места проверки;
S2: установка устройства обнаружения потенциалов (3) в месте проверки, выбранном на этапе S1, и получение данных потенциалов в месте проверки на текущий момент; в то же время установка устройства определения пройденного расстояния (5) и устройства определения тягового тока (6) на локомотиве (4) для получения данных о пройденном расстоянии и данных тягового тока локомотива (4) на текущий момент соответственно;
S3: движение локомотива (4) к подстанции (2) по откаточному рельсу (1), во время движения используются устройство обнаружения потенциалов (3), устройство определения пройденного расстояния (5) и устройство определения тягового тока (6) и непрерывно собираются данные о потенциалах, данные о пройденном расстоянии и данные тягового тока соответственно, контролируемые блоком управления (7), синхронизируется время исследования устройства обнаружения потенциалов (3), устройства определения пройденного расстояния (5) и устройства определения тягового тока (6) и отправляются полученные данные при помощи устройства обнаружения потенциалов (3), устройства определения пройденного расстояния (5) и устройства обнаружения тягового тока (6) в блок управления (7) соответственно путем беспроводной связи;
S4: распознавание блоком управления (7) согласно правилу, при котором скачок потенциала возникает, если изменение потенциала между соседними интервалами выборки превышает предварительно установленное значение, скачка потенциала и соответствующего времени скачка из принятых данных о потенциалах; и заданные блоком управления (7) данные о пройденном расстоянии, полученные устройством определения пройденного расстояния (5) во время движения локомотива (4) к месту проверки, принимаются в виде общей длины пройденного расстояния L1 локомотивом 4; определение пройденного расстояния L2 локомотивом (4) в момент скачка из полученных данных о пройденном расстоянии и использование значения разности между общей длиной движения L1 и пройденным расстоянием L2 в виде расстояния L между местом повреждения изоляции (12) откаточного рельса (1) и местом проверки, а именно L = L1 − L2; а также
S5: определение блоком управления (7) тягового тока локомотива (4) в момент скачка согласно полученным текущим данным о тяговом токе и определение тягового тока в виде I, определение потенциала в месте проверки из полученных данных о потенциалах в момент скачка и определение потенциала в виде V.
2. Способ по п. 1, отличающийся тем, что локомотив (4) является тяговым локомотивом постоянного тока.
3. Способ по п. 1, отличающийся тем, что устройство обнаружения потенциалов (3) состоит из модуля передачи напряжения, модуля сбора данных и модуля беспроводной связи; место проверки соединено с модулем передачи напряжения кабелем для передачи сигналов; модуль передачи напряжения преобразует сигнал потенциала с места проверки в соответствии с типом данных и диапазоном, которые допускаются модулем сбора данных, а модуль сбора данных получает и обрабатывает преобразованные данные, а затем отправляет их в блок управления (7) при помощи модуля беспроводной связи.
4. Способ по п. 1, отличающийся тем, что устройство определения пройденного расстояния (5) состоит из датчика угла поворота, программируемого контроллером, и модуля беспроводной связи; датчик угла поворота установлен на колесной оси локомотива (4); датчик угла поворота преобразует сигнал скорости локомотива (4) в ряд высокочастотных импульсов, которые регистрируются высокоскоростным счетчиком программируемого контроллера; и программируемый контроллер вычисляет количество оборотов колеса локомотива (4), используя произведение при умножении количества оборотов на длину окружности в качестве пройденного расстояния локомотивом (4), и отправляет это пройденное расстояние на блок управления (7) при помощи модуля беспроводной связи.
5. Способ по п. 1, отличающийся тем, что устройство определения тягового тока содержит (6) оптоволоконный трансформатор тока и модуль беспроводной связи, где оптоволоконный трансформатор тока определяет тяговый ток локомотива (4) и отправляет его на блок управления (7) при помощи модуля беспроводной связи.
| Устройство для измерения проводимости изоляции рельсовой линии | 1982 |
|
SU1134448A1 |
| Устройство для измерения проводимости изоляции рельсовой линии | 1978 |
|
SU680937A1 |
| EP 3364201 A1, 22.08.2018 | |||
| CN 108344932 A, 31.07.2018 | |||
| CN 108828393 A, 16.11.2018. | |||

