Уровень техники
Настоящее изобретение, в общем, относится к сортировочным станциям и более конкретно к способам и устройствам определения, сцеплена ли тяговая установка поезда с железнодорожным вагоном.
Сортировочные станции на железной дороге представляют собой центр систем железнодорожного транспорта. Поэтому сортировочные станции выполняют множество услуг, например они представляют собой исходную точку транспортных перевозок, место смены направления и место окончания перевозки, место хранения локомотива и его технического обслуживания, сборки и проверки новых поездов, технического обслуживания поездов, проходящих через предприятие, место проверки и технического обслуживания железнодорожных вагонов и хранения железнодорожных вагонов. Различные услуги на сортировочной станции конкурируют между собой за ресурсы, такие как персонал, оборудование и пространство на различных предприятиях, таким образом, что эффективное обслуживание всей железнодорожной сортировочной станции представляет собой сложную операцию.
Руководство железными дорогами, в общем, понимает, что задачи администрирования сортировочной станцией могут успешно решаться на основе использования инструментов администрирования, которые основаны на принципах оптимизации. В таких инструментах используется текущее состояние сортировочной станции и список задач, которые должны быть выполнены для определения оптимального порядка, в котором требуется выполнять эти задачи.
Однако любая система менеджмента основана на достоверных и своевременных данных, относящихся к текущему состоянию управляемой системы. На большинстве сортировочных станций технология ввода текущих данных представляет собой смесь выполняемых вручную и автоматизированных способов. Например, считыватели автоматизированной идентификации оборудования (AEI, АИО) и компьютеры AEI определяют место расположения подвижного состава в определенных точках последовательности операций, но, в общем, эта информация ограничивает знание о местонахождении подвижного состава, по большей части, моментом, в который подвижной состав прибыл, моментом, в который подвижной состав проходит мимо считывателя AEI, и моментом, в который подвижной состав убывает.
О месте расположения обычных средств на сортировочной станции обычно сообщают с использованием голосовой радиосвязи. Подходы определения в точке, такие как счетчики колес, рельсовые цепи и считыватели меток автоматической идентификации оборудования (AEI), используют для определения подвижных средств в конкретных отдельных местах расположения на рельсовых путях. В современных системах дистанционного управления используют метки GPS (глобальная система навигации) и AEI для предотвращения выхода управляемого локомотива за пределы границ сортировочной станции. Камеры размещены на сортировочных станциях с совместно используемыми дисплеями, что позволяет персоналу сортировочной станции (то есть начальнику сортировочной станции, дежурному по горке сортировочной станции, менеджеру операций терминала) определять места расположения тяговых установок и других подвижных средств.
В частности, операторы сортировочной станции выполняют сцепку и расцепку железнодорожных вагонов по мере того, как они поступают на сортировочную станцию, выходят из нее и перемещаются через нее. Эти железнодорожные вагоны сцепляют и расцепляют с тяговыми установками поезда, включая в себя тяговые установки локомотивов и маневровые тяговые установки. Например, операторы могут расцеплять железнодорожные вагоны от прибывающих тяговых установок локомотивов и сцеплять железнодорожные вагоны с отправляющимися тяговыми установками локомотивов. Кроме того, маневровые тяговые установки могут быть сцеплены с железнодорожными вагонами для транспортировки железнодорожных вагонов в соответствующие места расположения в пределах сортировочной станции для загрузки, разгрузки или другой обработки.
Тяговые установки для железнодорожных поездов на сортировочной станции можно отслеживать для определения последовательности выполнения задачи, а также для определения эффективности использования тяговой установки (установок). Для отслеживания установок на сортировочной станции оператор может отслеживать сцепление и расцепление локомотивных тяговых установок и маневровых тяговых установок, при этом информация о состоянии поезда поступает через радиоканалы. Однако система, отслеживаемая оператором, может быть неэффективной, поскольку в ней не обеспечивается мониторинг в режиме реального времени состояния тяговых установок поездов, поскольку такая передача данных, если она присутствует, может происходить с достаточным запаздыванием после события сцепки или расцепки вагонов.
Для эффективной работы сортировочной станции было бы полезно обеспечить автоматическую систему, которая отслеживала бы состояние маневровых тяговых установок и обеспечивала бы данные в режиме реального времени. В частности, данные в режиме реального времени, обозначающие, сцеплена ли движущая установка с железнодорожным вагоном или расцеплена с ним, обеспечивали бы возможность понимания хода операций, выполняемых на сортировочной станции. Кроме того, на сортировочных станциях может присутствовать множество маневровых тяговых установок, которые активно работают для обработки прибывающих поездов и составления отправляемых поездов.
Поэтому эффективность работы сортировочной станции может быть реализована благодаря возможности автоматической проверки того, что тяговая установка сцеплена и перемещает один или более железнодорожных вагонов. Другие преимущества могут быть реализованы путем использования состояния маневровой движущей установки при решении задач планирования работы сортировочной станции. Имея автоматически полученные данные в режиме реального времени, относящиеся к работе маневровых тяговых установок, рабочий персонал сортировочной станции получает возможность доступа к располагаемым и используемым ресурсам для соответствующего планирования следующих задач.
В соответствии с этим, необходимо обеспечить устройство и систему для обозначения, сцеплены ли тяговые установки поездов с железнодорожными вагонами или расцеплены с ними, в которых данные в режиме реального времени поступали бы из системы автоматического мониторинга.
Сущность изобретения
Устройство для обозначения, находится ли первая сцепка локомотива в сцепленном или в расцепленном состоянии.
Устройство содержит датчик, установленный на участке первой сцепки, при этом датчик обеспечивает сигнал в режиме реального времени, обозначающий наличие в непосредственной близости или присутствие второй сцепки в пределах зоны приема первой сцепки, причем сигнал передается по беспроводному каналу передачи данных с помощью передатчика, функционально соединенного с датчиком.
Также предусмотрена сцепка, выполненная с возможностью обозначения, соединена ли сцепка с другим железнодорожным вагоном. Сцепка содержит основной участок корпуса, содержащий участок шейки и зону приема, образованную участком основного участка корпуса; кулак автосцепки, шарнирно установленный на основном участке корпуса и выполненный с возможностью перемещения между сцепленным положением и расцепленным положением, при этом кулак автосцепки выполнен с возможностью поворота в зону приема, когда кулак автосцепки поворачивается из расцепленного положения в сцепленное положение; и датчик, установленный на участке сцепки, причем датчик выполнен с возможностью обеспечения сигнала, обозначающего либо сцепленное состояние, или расцепленное состояние сцепки, при этом сцепленное или расцепленное состояние определяется присутствием второй сцепки в пределах зоны приема первой сцепки, причем сигнал передается по беспроводному каналу передачи данных с помощью передатчика, функционально соединенного с датчиком.
Также предусмотрена система для определения, была ли сцепка локомотива сцеплена с другим железнодорожным вагоном. Система содержит датчик, выполненный с возможностью обеспечения сигнала, обозначающего сцепленное состояние сцепки; передатчик, функционально соединенный с датчиком, причем передатчик выполнен с возможностью приема и передачи сигнала; систему определения состояния, выполненную с возможностью приема сигнала из передатчика, который содержит система определения состояния; контроллер, носитель данных и устройство отображения, при этом контроллер выполнен с возможностью представления графического обозначения состояния сцепки на устройстве отображения, причем графическое обозначение представляет состояние локомотива в режиме реального времени.
В другом примерном варианте также предусмотрен способ определения, находится ли сцепка тягового устройства локомотива в сцепленном или в расцепленном состоянии. Способ включает обеспечение сигнала, обозначающего состояние сцепки, причем сигнал обеспечивается датчиком, выполненным с возможностью обеспечения сигнала при изменении сцепленного состояния сцепки; передачу сигнала по беспроводному каналу передачи данных в контроллер; обработку сигнала с помощью алгоритма управления, находящегося резидентно в контроллере; и обеспечение визуально воспринимаемого обозначения положения сцепки.
Краткое описание чертежей
На фиг.1 схематично представлена система мониторинга в соответствии с примерными вариантами осуществления настоящего изобретения;
на фиг.2-2B показаны виды, иллюстрирующие сцепки, построенные в соответствии с примерными вариантами осуществления настоящего изобретения;
на фиг.3 показан вид сверху в плане пары сцепок в сцепленном состоянии;
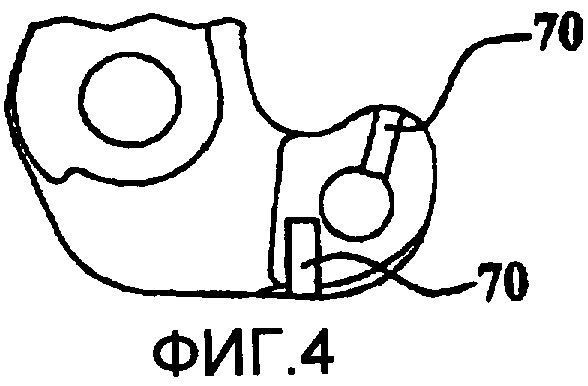
на фиг.4 показан вид датчика в соответствии с примерным вариантом осуществления настоящего изобретения;
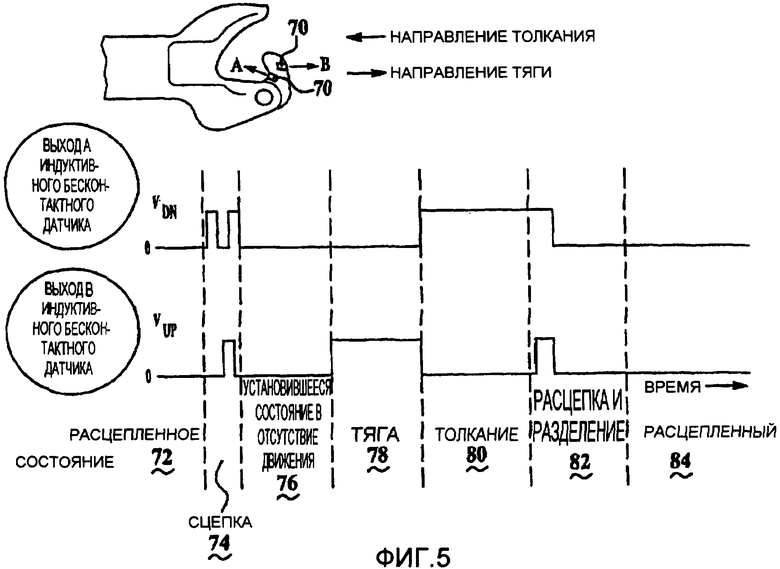
на фиг.5 показано графическое представление выходных сигналов пары датчиков в соответствии с примерным вариантом осуществления настоящего изобретения;
на фиг.6 показано графическое представление выходных сигналов в соответствии с альтернативным примерным вариантом осуществления настоящего изобретения;
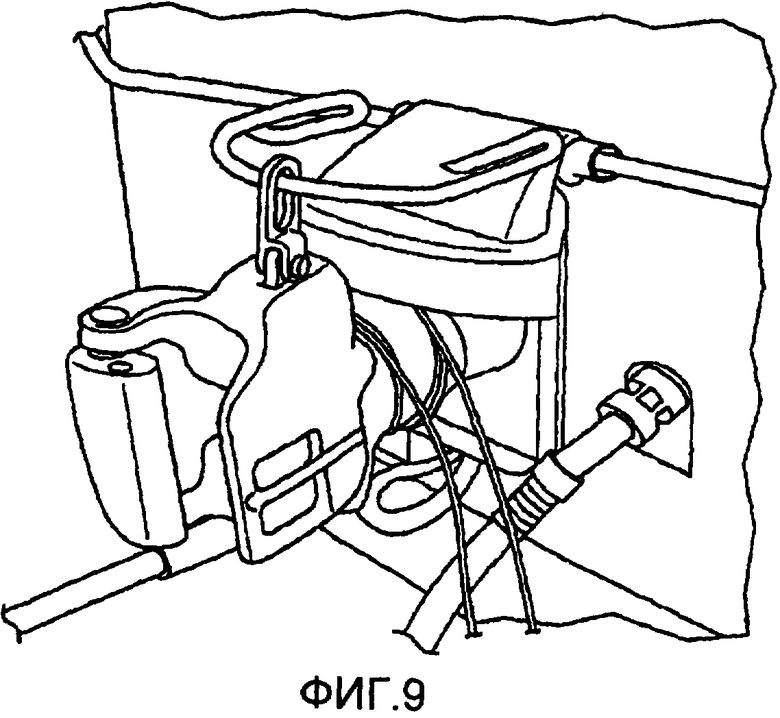
на фиг.7-9 показаны иллюстрации альтернативного примерного варианта осуществления;
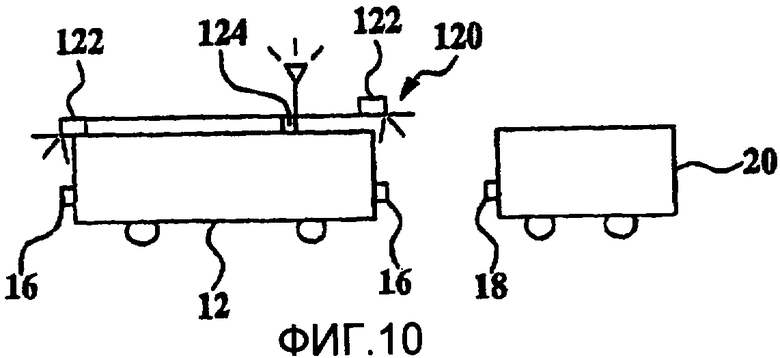
на фиг.10 показана схематичная иллюстрация еще одного альтернативного примерного варианта осуществления; и
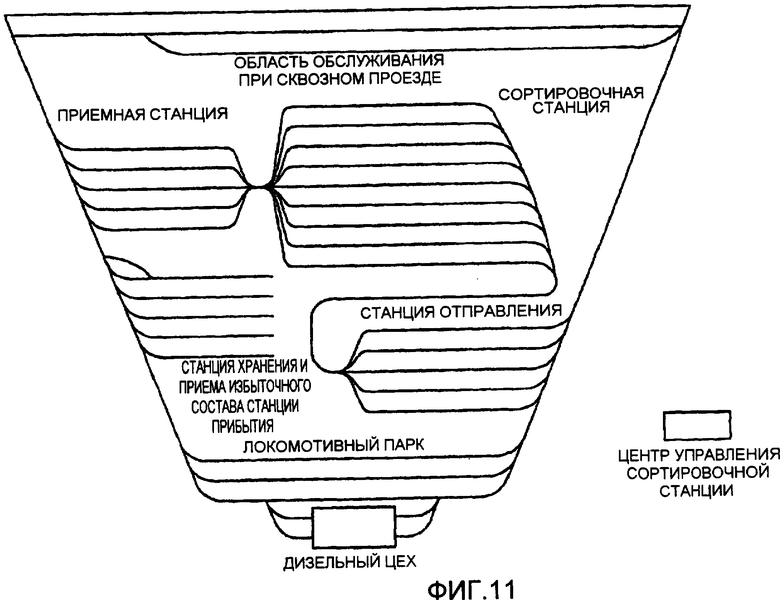
на фиг.11 схематично представлена иллюстрация железнодорожной сортировочной станции.
Подробное описание примерных вариантов осуществления изобретения
Примерные варианты осуществления настоящего изобретения направлены на систему и способ для надежного определения состояния сцепки локомотива. Обычно маневровые тяговые установки или локомотивы предназначены для передвижения магистральных локомотивов или других железнодорожных вагонов (например, вагонов, которые толкают или тянут с помощью локомотивов) в различные области обслуживания или погрузки сортировочной станции. Соответственно, необходимо знать, когда маневровая тяговая установка сцеплена с железнодорожным вагоном или дорожным локомотивом. В соответствии с примерным вариантом осуществления, предусмотрены датчики для определения как сцепленного состояния, так и расцепленного состояния локомотива. Выходной сигнал датчика передают по беспроводной сети в систему управления и мониторинга. В одном примерном варианте осуществления данные датчика сцепки могут быть скомбинированы с другими данными, такими как скорость и направление движения локомотива, которые также поступают по беспроводным каналам передачи данных. Эта информация позволяет осуществлять оценку и использование локомотива. Кроме того, состояние сцепки можно использовать для мониторинга последовательности выполнения назначенных задач и планирования последующих задач, что, таким образом, повышает производительность операций, выполняемых железнодорожной сортировочной станцией.
Делается ссылка на следующую заявку на патент, регистрационный номер 10/360,055, поданную 6 февраля 2003 г., содержание которой приведено здесь в качестве ссылки.
Рассмотрим теперь фиг.1 и 2, на которых показана система 10 мониторинга для использования с железнодорожным локомотивом 12. В системе управления используются датчик или датчики 14 для определения, находится ли сцепка 16 локомотива или тяговой установки 12 в сцепленном состоянии с другой сцепкой 18 железнодорожного вагона 20. В примерном варианте осуществления датчик 14 функционально соединен с приемопередатчиком (например, приемником и передатчиком) или передатчиком 22, который выполнен с возможностью передачи сигнала 24, обозначающего сцепленное состояние сцепки 16.
Кроме того, предусмотрена система 26 определения состояния, в которой приемник или приемопередатчик 28 функционально соединен с контроллером 30. Приемник или приемопередатчик 28 выполнен с возможностью приема сигнала 24 и передачи его в контроллер 30, причем контроллер 30 выполнен с возможностью анализа одного или более входных сигналов от датчиков 14 и формирования одного или более соответствующих выходных сигналов, предназначенных для использования при администрировании сортировочной станции. Контроллер может быть выполнен в форме микрокомпьютера, микроконтроллера или другого программируемого устройства управления, либо как отдельный компонент или как интегральная часть системы управления железнодорожной сортировочной станцией. При этом контроллер может представлять собой аналоговое или цифровое устройство любого известного типа и может быть воплощен в виде аппаратного средства, программного средства или встроенного программного обеспечения.
Система определения состояния дополнительно включает в себя накопитель 32 информации, такой как энергонезависимое запоминающее устройство, предназначенное для сохранения инструкции программы управления для контроллера и других данных, используемых системой 10. Кроме того, система определения состояния включает в себя устройство 34 отображения, такое как монитор или экран компьютера, на котором обозначается место расположения поезда и движение в виде графического представления железнодорожной сортировочной станции, при этом и в альтернативном примерном варианте осуществления графический дисплей включает в себя места расположения поезда, места расположения путей и другие элементы железнодорожной сортировочной станции, отображаемой системой.
Кроме того, действие "сцепки" или использования "сцепки" здесь включает в себя законченное соединение и/или контакт устройств сцепки тяговых установок поездов и железнодорожных вагонов по мере их взаимодействия для выполнения соединения с помощью сцепки. Для сцепки железнодорожных вагонов и локомотивов (или тяговых установок) сцепка располагается, по меньшей мере, на одном их конце. Существует несколько типов сцепок, известных специалистам в соответствующих областях техники, причем один из таких источников, описывающих типы сцепок, представляет собой публикация "The Railroad What It Is, What It Does" by John H. Armstrong, 4th Edition, Simmons-Boardman Books Inc., 1998, page 106.
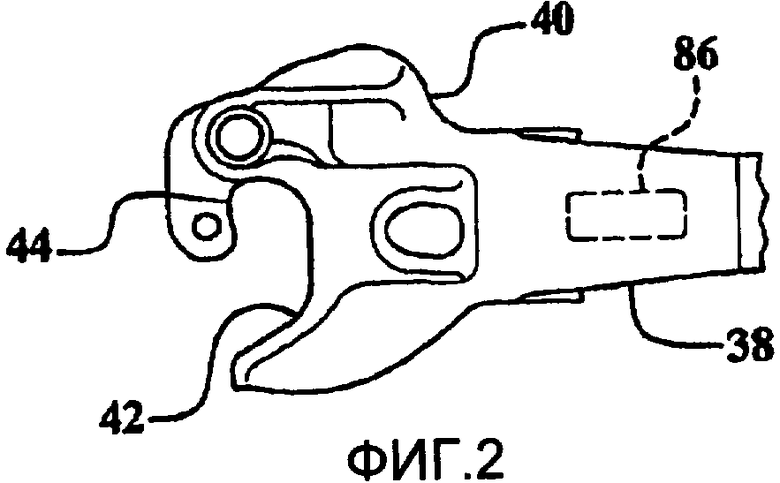
На фиг.2-2B показан не ограничивающий пример сцепного устройства (16, 18), использование которого предусматривается в примерных вариантах осуществления настоящего изобретения. Каждое сцепное устройство содержит участок 38 горловины, имеющий соединительный участок или участок 40 головки, закрепленный на нем. Соединительный участок 40 образует участок горловины или зону 42 приема, выполненную с возможностью приема участка другого сцепного устройства, закрепляемого в ней. Сцепка также содержит участок 44 кулака автосцепки, шарнирно установленного на участке соединительного участка, образующего участок горловины. Участок 44 кулака автосцепки выполнен с возможностью шарнирного осевого перемещения между сцепленным участком и расцепленным участком для соединения с другим участком кулака автосцепки другой сцепки.
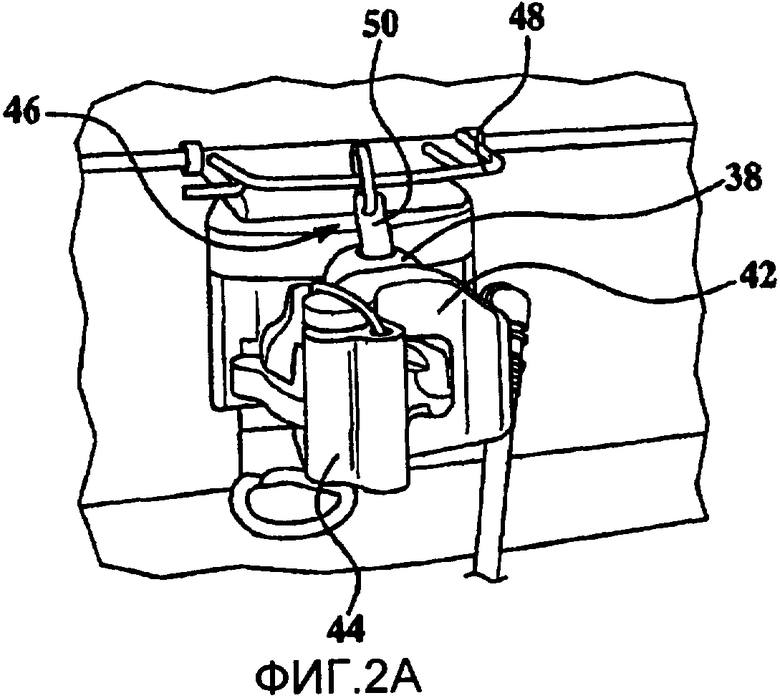
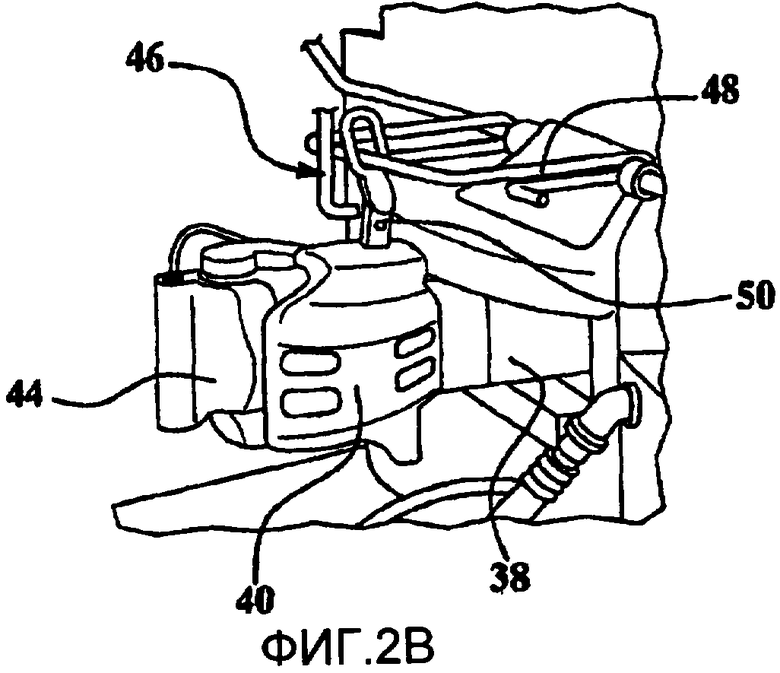
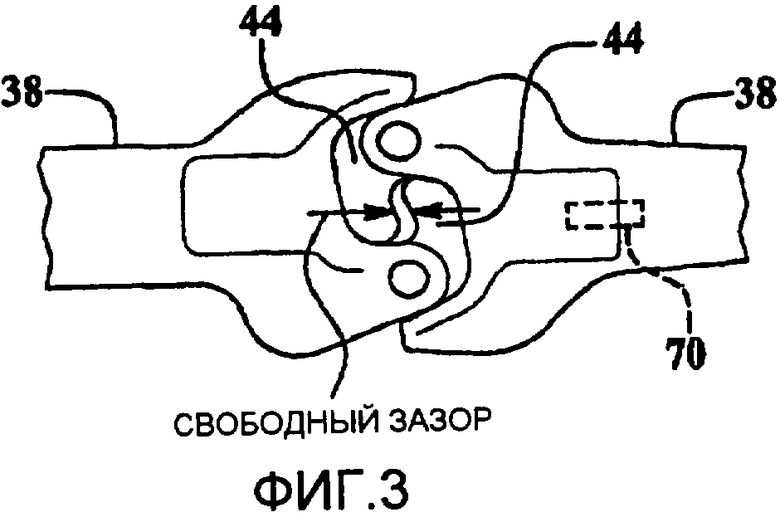
В Северной Америке железнодорожная промышленность стандартизировала использование качающейся конструкции кулака автосцепки, в которой используется принцип соединенных рук. Для автоматического соединения сцепок вместе один или оба из кулаков автосцепки должны быть открыты, когда железнодорожные вагоны со сцепками сталкивают вместе, при этом открытый кулак автосцепки перемещается (проталкивается) в закрытое положение вторым устройством сцепки, и фиксирующее устройство 46 падает вниз для удержания кулака автосцепки в этом положении и удержания его в закрытом состоянии. Для расцепки сцепок вагоны толкают вместе таким образом, что устраняется нагрузка, действующая на сцепку, и оператор поднимает расцепляющий рычаг 48 фиксирующего устройства, которое поднимает стопор 50, который обеспечивает возможность поворота кулака автосцепки в открытое положение, когда вагон и тяговую установку разводят друг от друга. Иллюстрация двух сцепок, соединенных вместе, показана на фиг.3.
Состояния, связанные со сцепкой, включают в себя приближение железнодорожного вагона 20 (фиг.1), сближение (фактический контакт) с железнодорожным вагоном (удар) и различные получаемые в результате эффекты удара (эффект). Информация, представляющая эти состояния, может быть идентифицирована, записана и передана в систему 10 мониторинга через различные датчики 14. Кроме того, действие "сцепки", поскольку этот термин используется в настоящем описании, включает в себя завершенное соединение и/или контакт сцепных устройств при их взаимодействии для получения сцепленного соединения, что соответствует контексту описания.
Кроме того, используемый здесь термин "расцепка" определен как отсутствие соединения между сцепными устройствами или раскрыв и разделение сцепных устройств. Следует отметить, что расцепка не подразумевает удар как результат события сцепки (когда локомотив входит в контакт с железнодорожным вагоном на скорости, обычно меньшей, чем четыре мили в час).
В соответствии с примерным вариантом осуществления, датчики 14 установлены на сцепках на каждом конце (переднем и заднем) локомотива (или маневровой тяговой установки). Выходной сигнал этих датчиков передают с использованием беспроводной сети из локомотива в центральный пункт управления (то есть пункт мониторинга), в котором расположена система определения состояния. Кроме датчиков сцепки, скорость и направление движения локомотива также могут быть переданы в центральный пункт управления. Скорость и направление могут быть получены с использованием приемника GPS или других устройств 60, которые также оборудованы приемопередатчиком или передатчиком 62 для того, чтобы, по меньшей мере, передавать сигнал 64 скорости и направления в приемопередатчик системы определения состояния.
В соответствии с примерными вариантами осуществления настоящего изобретения определение состояния сцепок осуществляют с использованием одного или более следующих подходов: бесконтактные датчики встроены в кулак автосцепки или в горловину сцепного устройства; один или более тензодатчиков закреплены на горловине сцепки; магнитная цепь и система визуального определения, состоящая из камеры и компьютерной видеосистемы, или любое другое эквивалентное устройство, позволяющее обеспечивать сигнал или сигналы в режиме реального времени, обозначающие состояние сцепки.
Рассмотрим теперь фиг.3, на которой представлен примерный вариант осуществления, в котором предусмотрен один или более индуктивных бесконтактных датчиков 70, встроенных в кулак автосцепки или горловину сцепного устройства. Здесь промышленный бесконтактный датчик установлен в корпусе автосцепки так, что его активный конец находится на горловине, причем присутствие кулака автосцепки в другой сцепке в горловине переключает датчик или обеспечивает формирование датчиком выходного сигнала. Такие индуктивные бесконтактные датчики обычно используют в промышленной среде для определения присутствия содержащих железо металлов. Один не ограничивающий пример такого индуктивного бесконтактного датчика поставляется компанией Turck, и дополнительную информацию можно найти на сайте www.turck.com. Конечно, в примерных вариантах осуществления настоящего изобретения предусматривается возможность использования других индуктивных датчиков. В соответствии с этим, такой датчик будет реагировать на присутствие другого стального кулака автосцепки в непосредственной близости с датчиком. В соответствии с примерным вариантом осуществления и со ссылкой теперь на фиг.4 и 5, множество датчиков 70 используют для определения сцепленного или расцепленного состояния независимо от направления движения (то есть толкают или тянут железнодорожный вагон).
На фиг.4 показан не ограничивающий пример мест, в которых может быть установлена пара бесконтактных датчиков 70 в кулаке автосцепки, причем каждый датчик имеет активный конец, расположенный с возможностью определения участка другого кулака автосцепки. Хотя бесконтактные датчики могут быть установлены на шейке или на горловине сцепки, установка этих датчиков в кулаке автосцепки обеспечивает быстрое конфигурирование и использование, поскольку кулаки автосцепки могут быть заменены обслуживающим персоналом в течение нескольких минут. Замена горловины сцепки, с другой стороны, требует технического обслуживания в локомотивном цеху.
Рассмотрим теперь фиг.5, на которой показан график работы датчиков A и B, передающих сигналы, представляющие различные состояния сцепки. В отсутствие непосредственной близости металла бесконтактные датчики выводят низкий (нулевой) уровень напряжения (состояние 72). Используя конфигурацию, показанную на фиг.4, один или оба бесконтактных датчика передают высоковольтный уровень напряжения, когда другой кулак автосцепки и сцепка вводятся в контакт во время события сцепки. В зависимости от относительного положения двух сцепок и их кулаков автосцепки, из-за наличия открытого пространства, называемого "зазором", компоненты сцепки могут находиться за пределами дальности действия датчика. В таких условиях датчики не будут определять состояние сцепки. Это показано состоянием 76. Когда железнодорожный вагон движется, один или более бесконтактных датчиков будет формировать выходной сигнал с высоким напряжением независимо от направления движения (то есть железнодорожный вагон толкают или тянут). Это показано состояниями 70 и 80. Расцепка и разделение также показаны состоянием 82, в котором оба датчика формируют выходной сигнал. Место размещения бесконтактных датчиков выбирают так, чтобы обеспечить потенциальное несовмещение сцепок, которое составляет порядка 10 градусов или меньше. Несовмещение показано как "свободный зазор" на фиг.3. Кроме того, бесконтактные датчики выбирают так, чтобы они обеспечивали расстояние определения металлических поверхностей порядка 3/8 дюйма (что представляет половину 3/4 дюйма, которое, как считается, составляет промежуток зазора для пары сцепок при номинальных условиях). Конечно, рассматриваются другие конфигурации в соответствии с примерными вариантами осуществления настоящего изобретения.
Рассмотрим теперь снова фиг.5, на которой представлены выходные сигналы бесконтактного датчика для различных состояний сцепки и движения вагона, при этом отмечено, что во время установившегося состояния уровни выходных сигналов датчиков зависят от полученного в результате зазора и расстояний определения бесконтактных датчиков. В соответствии с примерным вариантом осуществления, оба события сцепки и расцепки проявляются на одном или и более выходах датчиков (состояние 74 и 82). Таким образом, по мере движения локомотива, по меньшей мере, один из бесконтактных датчиков приводится в контакт или в состояние, близкое к контакту с противоположным кулаком автосцепки или сцепкой, по мере того, как происходит устранение зазора между вагонами. В соответствии с этим, этот выходной сигнал и данные передают в контроллер, в котором обеспечивается дополнительная обработка, и представляют статус маневровой тяговой установки или локомотива для оператора сортировочной станции.
В альтернативном варианте осуществления и как показано на фиг.1, 2 и 6, один или более датчиков типа тензометрического датчика 86 закреплены на шейке сцепки. В этом варианте выполнения сила, действующая на шейку, определяется с помощью датчика, который обеспечивает показатель, толкает ли или тянет ли локомотив нагрузку. Не ограничивающий пример выхода тензометрического датчика 86, установленного на шейке сцепки, представлен на фиг.6. Как показано на чертеже, сила, возникающая при событии сцепки, преобразуется в положительный выходной сигнал 88 датчика. Когда локомотив толкает или тянет железнодорожный вагон (или другой локомотив), силы формируют не нулевой выходной сигнал тензометрического датчика. После этого на фиг.6 представлено состояние остановки локомотива, движение локомотива в обратном направлении, удар, возникающий, когда локомотив тянет вагоны, и состояние установившейся тяги тяговой установки. После этого также иллюстрируются выходные сигналы датчика в соответствующих состояниях пониженной скорости, торможения и остановки поезда. В соответствии с этим, каждое из этих состояний может определяться с помощью тензометрического датчика или датчиков (любого типа или порядков), причем датчик формирует выходной сигнал в цифровом или аналоговом формате для дальнейшей интерпретации с помощью алгоритмов управления системой 10.
В данном варианте осуществления определение события расцепки также требует комбинации информации о движении тяговой установки (то есть скорости) от датчика 60. Другими словами, событие расцепки будет распознано только когда локомотив движется и сигнал скорости будет представлять собой второй сигнал, требуемый для представления того, что локомотив движется, и он расцеплен. Не ограничивающие примеры тензометрических датчиков включают мост Уитстона, и выходное напряжение записывают с использованием беспроводного регистратора данных V-Link производства компании MicroStrain.
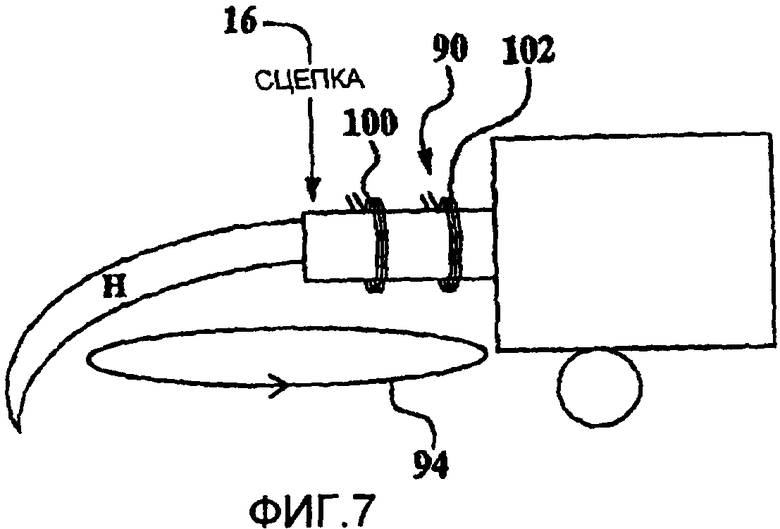
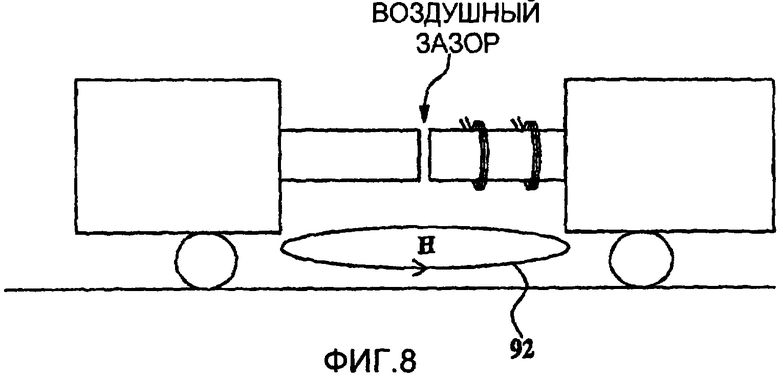
Рассмотрим теперь фиг.7-9, на которых показан другой альтернативный примерный вариант осуществления. Здесь иллюстрируется устройство 90 магнитной сигнализации. В этом варианте осуществления и, когда локомотив сцеплен с вагоном, используется магнитная цепь с высокой средней проницаемостью 94, которая образована замкнутым контуром, проходящим через шейку одной сцепки и через соседнюю сцепку, через раму соседнего вагона, и возвращается через рельсы к раме другого вагона и обратно к начальной точке шейки исходной сцепки. Эффективный воздушный зазор между этими двумя сцепками делает несущественными такие малые расстояния, как вносимые патиной неферромагнитного окисла железа, границами перехода, на которых нанесено масло, и т.д. Когда локомотив и вагон расцеплены (фиг.7), участок воздушного зазора магнитного контура цепи значительно увеличивается, поскольку магнитный поток затем должен проходить через воздух от кончика сцепки на рельсы. Это представлено как магнитный контур 94. В этом варианте осуществления устройство магнитного датчика содержит средство дифференцирования между сцепленным и расцепленным состояниями, которое определяет изменение средней проницаемости магнитного контура.
В качестве очень грубого анализа: индуктивность, определяемая по магнитному контуру, пропорциональна относительной проницаемости μe магнитного материала в контуре, где μe определяется, как μe =μ/μ0. μ представляет собой проницаемость (или "абсолютную проницаемость") материала, находящегося в магнитном контуре, в данном случае железа. При наличии воздушного зазора μe=μr/(1+(μr l g/l e)), где μr представляет собой относительную проницаемость железа, и l g представляет собой длину зазора.
Следует учитывать, что в расцепленном состоянии локомотива-вагона воздушный зазор длиной l g в магнитном контуре аппроксимируется эффективной длиной перемещения линии магнитного потока. В этом случае μe≈μr/(1+μr)≈1. Если локомотив находится в контакте с вагоном (случай контакта локомотива-вагона) аппроксимируем l g≈0 и μe≈μr . Изменение индуктивности между случаем расцепленных локомотива-вагона и случаем контакта локомотива-вагона должно быть очень значительным, и это изменение должно определяться множеством способов.
Один из способов создания такого устройства датчиком показан на фиг.7-9, на которых тяговый стержень окружен двумя электрическими катушками 100 и 102, расположенными в разных местах. Ток, изменяющийся по времени, пропускают через одну катушку, которая устанавливает изменяющееся по времени магнитное поле. Изменяющееся по времени магнитное поле индуцирует ток во второй катушке. Величина индуцированного тока будет большей в сцепленном состоянии. Таким образом, сцепленное состояние будет определяться.
Альтернативный способ определения изменения индуктивности магнитной цепи заключается в использовании одиночной катушки как части цепи оценки индуктивности, такой как простой резонатор настроенного контура.
Рассмотрим теперь фиг.10, на которой представлен еще один альтернативный примерный вариант осуществления. Здесь предусмотрена система 120 с визуальным датчиком с возможностью дистанционного определения. В этом варианте осуществления камера 122 установлена на конце локомотива над сцепкой и направлена на нее. Камера соединена с приемопередатчиком 124, в котором видеосигналы передают в компьютерные алгоритмы обработки видеоданных, установленные резидентно в микропроцессоре системы определения состояния, в которой алгоритмы обработки видеоданных применяют для поступающего видеопотока, для определения сцепленного состояния или расцепленного состояния. Изображение и алгоритмы компьютерной обработки, такие как согласование структуры, определение кромки и другие методики, можно применять для того, чтобы различать два состояния. Видеокамера может также включать в себя источник инфракрасного освещения для обеспечения улучшенной работы ночью и в условиях ненастной погоды.
В соответствии с примерными вариантами осуществления настоящего изобретения предусмотрен надежный датчик для определения сцепленного и расцепленного состояний локомотива или маневровой тяговой установки. Как описано здесь и в соответствии с примерным вариантом осуществления, предусмотрен беспроводный канал передачи данных о состоянии датчика из локомотива в центр управления (мониторинга).
Кроме того, определение сцепки маневровых тяговых установок может использоваться персоналом сортировочной станции для планирования и назначения задач, выполняемых на сортировочной станции, поскольку эти входные сигналы также можно использовать для подачи их в автоматизированную систему мониторинга, которая сохраняет исторические данные работы системы, такие как окончание задачи для отдельных локомотивов и их операторов. Кроме того, такая автоматизированная система мониторинга также может использоваться персоналом сортировочной станции для улучшения планирования работы и общей производительности сортировочной станции.
В соответствии с примерными вариантами осуществления настоящего изобретения обеспечиваются быстрые, простые и не дорогостоящие способы создания точной базы данных места расположения рельсовых путей сортировочной станции. Общий вид железнодорожной сортировочной станции представлен на фиг.11.
В соответствии с примерным вариантом осуществления, система мониторинга содержит, по меньшей мере, центральный компьютер, базу данных рельсовых путей и датчики, которые обеспечивают данные в режиме реального времени об объектах, присутствующих на железнодорожной сортировочной станции, для использования с базой данных рельсовых путей, для получения визуального представления объектов по мере их движения по сортировочной станции, которая может включать в себя различные участки сортировочной станции, включающие в себя, но не ограничиваясь, приемную станцию, сортировочную станцию, станцию складирования и приема и станцию отправления. В соответствии с примерным вариантом осуществления, в настоящем изобретении используются приемники GPS для получения точного места размещения локомотивов на железнодорожном пути и отображения его на дисплее состояния. Примерные варианты осуществления представляют места расположения в режиме реального времени объектов сортировочной станции для персонала железнодорожной сортировочной станции, что обеспечивает ему возможность принятия решений в критических по времени условиях в отношении безопасного и эффективного планирования задач.
Как описано выше, алгоритмы для выполнения примерных вариантов осуществления настоящего изобретения могут быть воплощены в форме выполняемых на компьютере процессов и в виде устройств, предназначенных для выполнения этих процессов на практике. Алгоритмы также могут быть внедрены в форме компьютерного программного кода, содержащего инструкции, воплощенные на материальных носителях, таких как гибкие диски, CD-ROM, приводы жестких дисков или любые другие носители информации, считываемые компьютером, в которых, когда компьютерный программный код загружается и выполняется компьютером и/или контроллером, компьютер становится устройством, предназначенным для выполнения на практике изобретения. Существующие системы, имеющие перепрограммируемые носители (например, запоминающее устройство типа флэш), могут обновляться для воплощения различных аспектов командного кода, алгоритмы также могут быть воплощены в форме, например, компьютерного программного кода, сохраненного на носителе информации, загруженного в компьютер и/или исполняемого компьютером, или передаваемого через некоторую среду передачи данных, например, путем передачи по электрическим проводам или по кабелям, с использованием оптоволоконных кабелей, или с помощью электромагнитного излучения, когда компьютерный программный код загружен в компьютер и выполняется компьютером. Когда он воплощен на основе микропроцессора общего назначения, сегменты компьютерного программного кода конфигурируют микропроцессор для построения конкретных логических цепочек.
Эти инструкции могут резидентно находиться, например, в оперативном запоминающем устройстве компьютера или контроллера. В качестве альтернативы, инструкции могут содержаться на устройстве хранения данных с машиночитаемым носителем, таким как компьютерная дискета, или инструкции могут быть сохранены на магнитной ленте, в обычном приводе жесткого диска, в электронном постоянном запоминающем устройстве, в устройстве - оптическом накопителе или в других соответствующих устройствах - накопителях данных. В иллюстративном варианте осуществления изобретения, выполняемые компьютером инструкции могут быть представлены строками компилированного кода, совместимого с C++.
В соответствии с примерными вариантами осуществления настоящего изобретения, центральный модуль управления может представлять собой контроллер и/или эквивалентное устройство любого типа, содержащее, помимо прочих элементов, микропроцессор, постоянное запоминающее устройство в форме электронного накопителя информации для исполнительных программ или алгоритмов и значений калибровки или констант, оперативное запоминающее устройство и шины передачи данных, обеспечивающие возможность необходимой передачи данных (например, ввода, вывода в пределах микропроцессора), в соответствии с известными технологиями. Следует понимать, что обработка в соответствии с упомянутым выше описанием может быть воплощена в виде контроллера, работающего в соответствии с компьютерной программой. Для выполнения предписанных функций и требуемой обработки, а также для соответствующих им расчетов контроллер может включать в себя, но не ограничиваясь, процессор (процессоры), компьютер (компьютеры), запоминающее устройство, накопитель информации, регистр (регистры), синхронизацию, прерывание (прерывания), интерфейсы передачи данных и интерфейсы ввода/вывода сигнала, а также комбинации, содержащие, по меньшей мере, одно из предыдущих.
Хотя изобретение было описано со ссылкой на предпочтительные варианты осуществления, для специалистов в данной области техники будет понятно, что различные изменения могут быть выполнены, и их элементы могут быть заменены эквивалентами не выходя за объем изобретения. Кроме того, множество модификаций могут быть выполнены для адаптации к конкретной ситуации или материала к описанию изобретения, не выходя за пределы существенного его объема. Поэтому предполагается, что изобретение не будет ограничено конкретным вариантом осуществления, описанным в качестве предпочтительного варианта, предусмотренного для выполнения настоящего изобретения, но что изобретение будет включать в себя все варианты осуществления, попадающие в пределы объема приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ВНУТРИПОЕЗДНЫХ СИЛ ПОЕЗДА | 2007 |
|
RU2424933C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2470814C2 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДА | 2007 |
|
RU2501695C2 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА И УПРАВЛЕНИЯ ИМ | 2016 |
|
RU2686262C1 |
| Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки | 2019 |
|
RU2705035C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕСУРСОВ В ПРЕДЕЛАХ ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2006 |
|
RU2473443C2 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |

Изобретение относится к сцепным устройствам железнодорожного транспорта. Устройство содержит датчик, расположенный на участке сцепки, который обеспечивает сигналы в режиме реального времени, обозначающие либо сцепленное, либо расцепленное состояние сцепки, причем сигнал передается по беспроводному каналу передачи данных с помощью передатчика, функционально соединенного с датчиком. Способ включает обеспечение сигнала, обозначающего наличие или присутствие второй сцепки в непосредственной близости к первой сцепке, передачу сигнала по беспроводному каналу передачи данных в контроллер, обработку сигнала с помощью алгоритма управления, резидентно установленного в контроллере, и обеспечение визуально воспринимаемого обозначения положения сцепки. Достигается эффективность работы сортировочной станции. 4 н. и 23 з.п. ф-лы, 13 ил.
1. Устройство для обозначения находится ли первая сцепка локомотива в сцепленном или расцепленном состоянии, содержащее датчик, установленный на участке сцепки, при этом датчик определяет состояние сцепки и обеспечивает сигнал в режиме реального времени, обозначающий либо сцепленное состояние, либо расцепленное состояние на основании определяемого состояния, причем сцепленное или расцепленное состояние обозначает наличие в непосредственной близости или присутствие участка второй сцепки в пределах зоны приема первой сцепки, при этом сигнал передается по беспроводному каналу передачи данных с помощью передатчика, функционально соединенного с датчиком.
2. Устройство по п.1, в котором датчик представляет собой индуктивный бесконтактный датчик, выполненный с возможностью определения присутствия второй сцепки в непосредственной близости к горловине первой сцепки.
3. Устройство по п.1, в котором датчик представляет собой пару индуктивных бесконтактных датчиков, расположенных на кулаке автосцепки первой сцепки, при этом первый датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения первого сигнала, обозначающего, что кулак автосцепки вытягивается другой сцепкой, а второй датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения второго сигнала, обозначающего, что кулак автосцепки вытягивается другой сцепкой.
4. Устройство по п.3, в котором пара индуктивных бесконтактных датчиков выполнена с возможностью обеспечения первого и второго сигналов, когда содержащий железо металл расположен в непосредственной близости к паре индуктивных бесконтактных датчиков.
5. Устройство по п.4, в котором каждый из пары индуктивных бесконтактных датчиков обеспечивает сигнал расцепленного состояния, когда кулак автосцепки не сцеплен с другой сцепкой.
6. Устройство по п.1, в котором датчик представляет собой тензодатчик, установленный на шейке сцепки.
7. Устройство по п.6, в котором тензодатчик обеспечивает выходные сигналы с ненулевым напряжением, когда на сцепку воздействует сила тяги или толкающая сила.
8. Устройство по п.1, в котором датчик содержит магнитный контур, выполненный с возможностью обеспечения определяемой проницаемости, когда первая сцепка находится в непосредственной близости ко второй сцепке или сцеплена с ней.
9. Устройство по п.8, в котором в магнитном контуре предусмотрена пара катушек, расположенных так, что они обращены друг к другу в одном пространстве сцепки, и устройство дополнительно содержит датчик для определения индуцированного тока, большего чем заданное значение, с использованием пары катушек, причем индуцированный ток генерируется, когда сцепка соединена с другой сцепкой.
10. Сцепка, выполненная с возможностью обозначения, соединена ли сцепка с другим железнодорожным вагоном, содержащая основной участок корпуса, содержащий участок шейки и зону приема, образованную участком основного участка корпуса, кулак автосцепки, шарнирно установленный на основном участке корпуса и выполненный с возможностью перемещения между сцепленным положением и расцепленным положением, при этом кулак автосцепки выполнен с возможностью поворота в зону приема, когда кулак автосцепки поворачивается из расцепленного положения в сцепленное положение и датчик, установленный на участке сцепки, причем датчик выполнен с возможностью определения состояния сцепки и обеспечения сигнала, обозначающего либо сцепленное состояние, либо расцепленное состояние на основании определяемого состояния, при этом сцепленное или расцепленное состояние определяется наличием или присутствием в непосредственной близости участка второй сцепки в пределах зоны приема, причем сигнал передается по беспроводному каналу передачи данных с помощью передатчика, функционально соединенного с датчиком.
11. Сцепка по п.10, в которой датчик представляет собой индуктивный бесконтактный датчик, выполненный с возможностью определения присутствия другой сцепки в непосредственной близости к горловине кулака автосцепки сцепки, на которой установлен датчик.
12. Сцепка по п.10, в которой датчик представляет собой пару индуктивных бесконтактных датчиков, расположенных на кулаке автосцепки, при этом первый датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения первого сигнала, обозначающего, что кулак автосцепки и сцепка тянут другую сцепку, а второй датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения второго сигнала, обозначающего, что кулак автосцепки и сцепка толкают другую сцепку.
13. Сцепка по п.9, в которой датчик представляет собой тензодатчик, установленный на шейке сцепки.
14. Сцепка по п.13, в которой тензодатчик обеспечивает выходные сигналы с не нулевым напряжением, когда на сцепку воздействует сила тяги или толкающая сила.
15. Сцепка по п.9, в которой датчик содержит магнитный контур, выполненный с возможностью обеспечения определяемой проницаемости, когда сцепка сцеплена с другим железнодорожным вагоном.
16. Сцепка по п.15, в которой в магнитном контуре предусмотрена пара катушек, расположенных так, что они обращены друг к другу в одном пространстве на сцепке, и устройство дополнительно содержит датчик для определения индуцированного тока, большего чем заданное значение, с использованием пары катушек, причем индуцированный ток генерируется, когда сцепка соединена с другой сцепкой.
17. Система для определения, была ли сцепка локомотива сцеплена с другим железнодорожным вагоном, содержащая датчик, выполненный с возможностью определения состояния сцепки и обеспечения сигнала, обозначающего сцепленное состояние сцепки на основании определяемого состояния, передатчик, функционально соединенный с датчиком, причем передатчик выполнен с возможностью приема и передачи сигнала, систему определения состояния, выполненную с возможностью приема сигнала из передатчика, который содержит система определения состояния, контроллер и носитель данных.
18. Система по п.17, дополнительно содержащая устройство отображения, при этом контроллер выполнен с возможностью представления графического обозначения состояния сцепки на устройстве отображения, причем графическое обозначение представляет состояние локомотива в режиме реального времени.
19. Система по п.17, в которой датчик представляет собой видеокамеру, выполненную с возможностью передачи видеосигналов в контроллер, при этом контроллер дополнительно содержит алгоритмы обработки изображения для определения, представляют ли видеосигналы сцепленный или расцепленный локомотив.
20. Система по п.17, в которой датчик представляет собой датчик, расположенный на участке сцепки, в котором датчик обеспечивает сигнал в режиме реального времени, обозначающий либо сцепленное состояние или расцепленное состояние сцепки, при этом сигнал передается по беспроводному каналу передачи данных с помощью передатчика, функционально соединенного с датчиком, причем датчик представляет собой индуктивный бесконтактный датчик, выполненный с возможностью определения присутствия другой сцепки в горловине сцепки, на которой установлен датчик, а носитель информации содержит базу данных ранее определенных состояний.
21. Система по п.20, в которой датчик представляет собой пару индуктивных бесконтактных датчиков, расположенных на кулаке автосцепки, при этом первый датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения первого сигнала, обозначающего, что сцепка тянет другую сцепку, а второй датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения второго сигнала, обозначающего, что сцепка толкает другую сцепку, и пара индуктивных бесконтактных датчиков выполнена с возможностью обеспечения первого и второго сигналов, когда содержащий железо металл расположен в непосредственной близости к паре индуктивных бесконтактных датчиков.
22. Система по п.17, в которой датчик представляет собой датчик, установленный на участке сцепки, при этом датчик обеспечивает сигнал в режиме реального времени, обозначающий либо сцепленное состояние или расцепленное состояние сцепки, причем сигнал передается по беспроводному каналу передачи данных с помощью передатчика, функционально соединенного с датчиком, при этом датчик представляет собой тензодатчик, расположенный на шейке сцепки, и тензодатчик обеспечивает выходные сигналы с ненулевым напряжением, когда на сцепку воздействуют сила тяги или толкающая сила.
23. Способ определения, находится ли сцепка тяговой установки локомотива в сцепленном или в расцепленном состоянии, включающий определение состояния сцепки, обеспечение сигнала, обозначающего состояние сцепки на основании определяемого сигнала, передачу сигнала по беспроводному каналу передачи данных в контроллер, обработку сигнала с помощью алгоритма управления, резидентно установленного в контроллере, и обеспечение визуально воспринимаемого обозначения положения сцепки.
24. Способ по п.23, в котором датчик представляет собой пару индуктивных бесконтактных датчиков, расположенных на кулаке автосцепки сцепки, при этом первый датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения первого сигнала, обозначающего, что сцепка тянет другую сцепку, а второй датчик из пары индуктивных бесконтактных датчиков выполнен с возможностью обеспечения второго сигнала, обозначающего, что сцепка толкает другую сцепку.
25. Способ по п.23, в котором датчик представляет собой тензодатчик, установленный на шейке сцепки, и тензодатчик обеспечивает выходные сигналы с ненулевым напряжением, когда на сцепку воздействует сила тяги или толкающая сила.
26. Способ по п.23, в котором датчик представляет собой либо магнитный контур, выполненный с возможностью обеспечения определяемой проницаемости, когда сцепка сцеплена с другой сцепкой.
27. Способ по п.23, в котором датчик представляет собой видеокамеру, выполненную с возможностью обеспечения видеосигналов в контроллер, при этом контроллер дополнительно содержит алгоритмы обработки изображения для определения, представляют ли видеосигналы сцепленный или расцепленный локомотив.
| DE 3112322 A1, 07.10.1982 | |||
| Устройство для автоматического расцепления вагонов на сортировочной горке | 1973 |
|
SU901124A1 |
| Способ контроля исправности автосцепок | 1987 |
|
SU1758434A1 |
| US 4838173 A, 13.06.1989 | |||
| НАЗЕМНЫЙ ДИАГНОСТИЧЕСКИЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС | 1997 |
|
RU2120876C1 |
| Устройство для контроля положения деталей в зоне автосцепки вагонов | 1990 |
|
SU1794734A1 |

