Изобретение относится к области медицинского оборудования, в частности к устройствам управления манипуляторами хирургических роботизированных систем для минимального инвазивного вмешательства.
Традиционным видом хирургического вмешательства является лапаратомия, которая заключается в выполнении длинного разреза в брюшной полости, через который вставляются традиционные хирургические инструменты. Однако выполнение длинных разрезов неминуемо приводит к высоким кровопотерям и длительному восстановлению пациентов. Кроме того возрастает риск инфекционных осложнений.
Применение малоинвазивных хирургических вмешательств (лапароскопия) позволяет устранить указанные недостатки. Вместо одного длинного разреза на пациенте делают от четырех до пяти маленьких, через которые вводятся длинные и тонкие хирургические инструменты и эндоскопические камеры. Данный метод уменьшает кровопотери, сокращает время пребывания в больнице и уменьшает болезненные ощущения пациента в период восстановления. Однако, несмотря на вышеупомянутые преимущества, лапароскопия требует от хирурга чрезвычайно высоких навыков работы. Входной разрез действует как точка вращения, уменьшая свободу позиционирования и ориентации инструментов внутри пациента. Кроме того, работа с эндоскопическими инструментами вынуждает хирургов работать в неудобной позе, что может быть утомительным в течение нескольких часов работы, снижается чувствительность, усиливается тремор рук хирурга.
Развитие лапароскопии привело к возникновению роботохирургии и, в частности, к возможности применения роботизированных хирургических систем. Минимально-инвазивные хирургические операции с применением роботизированных систем характеризуются низкой травматичностью, более быстрым выздоровлением пациента, сниженным риском развития осложнений и высокой эффективностью.
С помощью компьютеризированного роботизированного интерфейса данные системы позволяют выполнять лапароскопию дистанционно, когда хирург сидит за консолью и с помощью управляющей рукояти управляет манипуляторами, передающими движения непосредственно на хирургические инструменты.
Управляющая рукоять размещается на стойке хирурга и может располагаться на расстоянии от операционного стола для дистанционного управления манипуляторами роботизированного хирургического комплекса.
Известно устройство дистанционного управления манипулятором (патента США № 10112296, МПК B25J 9/16, B25J 3/04, B25J 13/02, A61B 34/37, A61B 34/00, G09B 9/00, опубликован 27.07.2017), содержащее антропоморфную руку, соединенную с управляющей рукоятью. Антропоморфная рука включает в себя первый участок, соединенный с опорным элементом А посредством первого соединения, сконфигурированного для определения первой оси вращения Z, и второй участок, соединенный с первым участком с помощью второго соединения, сконфигурированного для определения второй оси вращения Y. Антропоморфная рука также включает третий участок, соединенный со вторым участком с помощью третьего соединения, сконфигурированного для определения третьей оси вращения Х, и концевой участок, включающий концевой элемент, сконфигурированный для соединения с третьим участком, и противоположный концевой элемент, соединенный с управляющей рукоятью. При этом управляющая рукоять съемным образом соединяется с концевым участком антропоморфной руки посредством шарнирного соединения. Управляющая рукоять включает в себя первый концевой участок, обращенный к пользователю, и второй концевой участок, расположенный на противоположной стороне, выполненный с возможностью приема кольцевого корпуса, а также раму, выполненную с возможностью поддержания внутренней платформы, которая включает акселерометр, гироскоп и магнитометр. На управляющей рукояти предусмотрено захватное устройство для удерживания оператором, движение которого регулируется с помощью магнитометра. Устройство дистанционного управления манипулятором имеет семь степеней свободы, при этом первая, вторая и третья степени свободы формируются путем вращения антропоморфной руки, соответственно обеспечиваемое первым соединением, вторым соединением и третьим соединением; четвертая, пятая и шестая степени свободы сообщаются управляющей рукояти с помощью шарнирного соединения; седьмая степень свободы тоже относится к управляющей рукояти и обеспечивается захватывающим устройством и магнитометром.
В известном решении отсутствует вращение запястья джойстика в 2-х перпендикулярных плоскостях относительно оси, находящейся примерно в центре запястья, что не обеспечивает выполнение всех необходимых движений инструмента при операции, а именно не позволяет выполнить наложение шва на разрез тканей при операции.
Известно устройство ввода для перемещения концевых эффекторов и приведения их в действие, например, путем раскрытия и закрытия зажимных устройств концевого эффектора (патент США №6587750, МПК G06F 19/00, A61B 19/00, опубликован 27.03.2003г., принят за прототип). Оператор задает команду для приведения в действие хирургического концевого эффектора путем сжимания первого и второго элементов зажима, расположенных на рукоятке. Рукоятка поддерживается рычажным механизмом, включающим соединения для обеспечения перемещения рукоятки, как при поступательном движении, так и регулировании направления. Рычажный механизм включает руку, которая обеспечивает поступательное движение рукоятки, и кардан, который, обеспечивает и воспринимает изменения в ориентации рукоятки. Рука включает звенья, соединенные с помощью вращательных соединений, и опорную плиту для установки станции управления перед экраном. Приводы сцепляют с возможностью передачи приводного усилия соединения руки, при этом приводы, главным образом, установлены около опорной плиты, чтобы свести к минимуму инерцию всей системы ввода. Приводы управляются процессором, и, главным образом, обеспечивают обратную связь оператору для определения сил, прилагаемых к концевому эффектору хирургической средой, как правило, с помощью устройства копирующего управления. Вращательное положение рукоятки вокруг оси может быть определено с использованием потенциометра или энкодера, находящегося в приводе, и/или с помощью отдельного датчика вращения, присоединенного непосредственно к валу. Предлагаемая система обеспечивает шесть степеней свободы хирургического инструмента: вращение, тангаж, рыскание, линейное перемещение инструмента, сжатие и разжатие зажимных устройств.
В данном техническом решении отсутствует обратная связь на ручки при cжатии и расжатии браншей инструмента.
Техническая задача – обеспечение точного позиционирования хирургического инструмента, повышение безопасности системы.
Технический результат – высокая степень маневренности ведущего манипулятора и обеспечение обратной тактильной связи хирургу для повышения безопасности проведения операции.
Технический результат достигается тем, что ведущий манипулятор роботохирургического комплекса содержит цифровой блок управления, выполненный с возможностью приема и обработки данных от энкодеров узлов устройства, рычажный механизм, выполненный с возможностью поворота вокруг вертикальной оси и включающий выполненные с возможностью перемещения друг относительно друга плечо и локтевое звено, соединенные с соответствующими приводами, при этом локтевое звено соединено с запястьем, содержащим последовательно соединенные шарнирные звенья и подвижную рукоять с лепестками, указанные плечо и локтевое звено соединены со шкивами, выполненными с возможностью перемещения отдельными приводами, шарнирные звенья запястья выполнены с возможностью перемещения приводами, включающими серводвигатель и планетарный редуктор, рукоять соединена с выходным звеном запястья с возможностью поворота относительного него и содержит размещенный в корпусе электродвигатель с абсолютным энкодером и закрепленные на корпусе посредством осей лепестки, причем указанный электродвигатель соединен посредством системы рычагов с лепестками для передачи сопротивления на кисть хирурга.
Роботохирургический комплекс включает консоль хирурга, снабженную ведущими манипуляторами (джойстиками); стойку пациента, снабженную манипуляторами хирургических инструментов; вычислительную систему управления роботохирургическим комплексом, обеспечивающую взаимодействие узлов системы.
Стойка пациента роботохирургического комплекса содержит по меньшей мере один манипулятор с установленным на нем хирургическим инструментом, а консоль хирурга - по меньшей мере один джойстик, которое преобразует и передает команды оператора, подаваемые путем ручного перемещения джойстика, на вычислительную систему управления комплексом, а также получает команды от вычислительной системы управления комплексом.
Заявляемое устройство предназначено для преобразования в цифровой сигнал команд, подаваемых хирургом посредством движений рук с консоли хирурга.
Устройство состоит из рычажного механизма, запястья с установленной на нем рукоятью, контакт с которой осуществляет хирург, сервоприводов и цифрового блока управления.
Джойстик обеспечивает как передачу команд от хирурга к консоли хирурга, в частности на манипулятор и хирургический инструмент, так и получение команд на руку хирурга в виде обратной связи для обеспечения тактильных ощущений на руку хирурга.
При этом рычажный механизм имеет три степени свободы и выполнен с возможностью вращения относительно неподвижной опоры и поступательного перемещения запястья вверх-вниз, вперед-назад.
Запястье выполнено с пятью степенями свободы и имеет возможность поворота относительно рычажного механизма, поворота рукояти относительно запястья, поворота звеньев запястья относительно друг друга, а также сжатия–разжатия лепестков рукояти.
В одном из вариантов исполнения сервоприводы выполнены со встроенным датчиком положения углов (энкодером). В других вариантах осуществления энкодер соединяется с электродвигателем посредством специального переходника.
В некоторых вариантах осуществления изобретения сервопривод, соединенный с рычажным механизмом, выполнен с редуктором.
Энкодеры обеспечивают измерение параметров угловых и линейных перемещений и направление данных на микроконтроллеры. Информация с каждого микроконтроллера поступает в цифровой блок управления (мастер-контроллер), где осуществляется обработка данных о положении элементов джойстика и формирование команд на манипулятор хирургического инструмента, установленного на стойке пациента. При отклонении полученных данных от заложенных инструкцией микроконтроллер подает команду на соответствующий сервопривод для осуществления корректировки параметров положения.
Цифровой блок управления предназначен для получения сигналов от микроконтроллеров о текущем положении джойстика и передачи полученных сигналов на внешнюю систему управления роботохирургическим комплексом, а также для получения управляющих сигналов от внешней системы управления роботохирургическим комплексом и передачи их на микроконтроллеры джойстика.
Использование планетарных редукторов в приводах звеньев запястья обеспечивает высокую кинематическую точность и скорость преобразования и передачи крутящего момента, что повышает надежность ведущего манипулятора при проведении хирургических операций.
Заявляемое устройство характеризуется высокой степенью жесткости конструкции при одновременном обеспечении мобильности движений оператора и высокой точности согласованности перемещений рук оператора и хирургического инструмента. Наличие обратной связи, реализованной с использованием системы рычагов обеспечивающей создание сопротивления перемещению лепестков джойстика, обеспечивает интуитивность управления, а также повышает безопасность проведения операции.
Заявляемое изобретение иллюстрируется следующими чертежами:
Заявляемое изобретение поясняется чертежами:
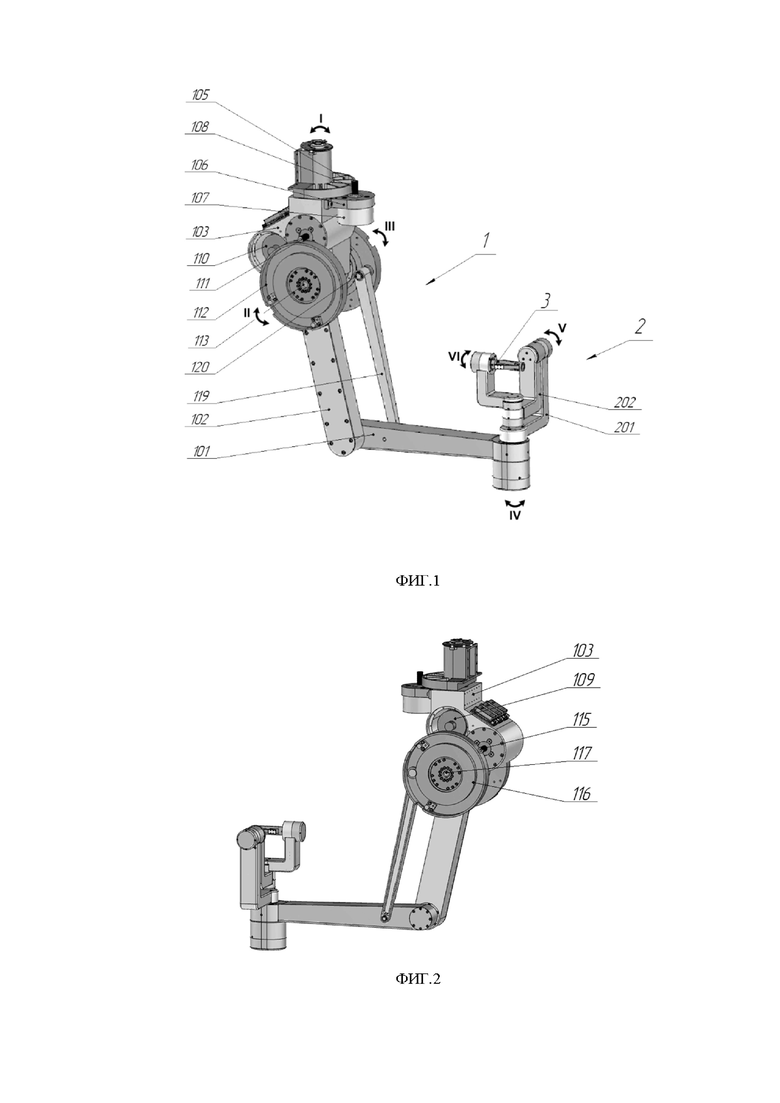
Фиг.1, 2 – общий вид джойстика в перспективе;
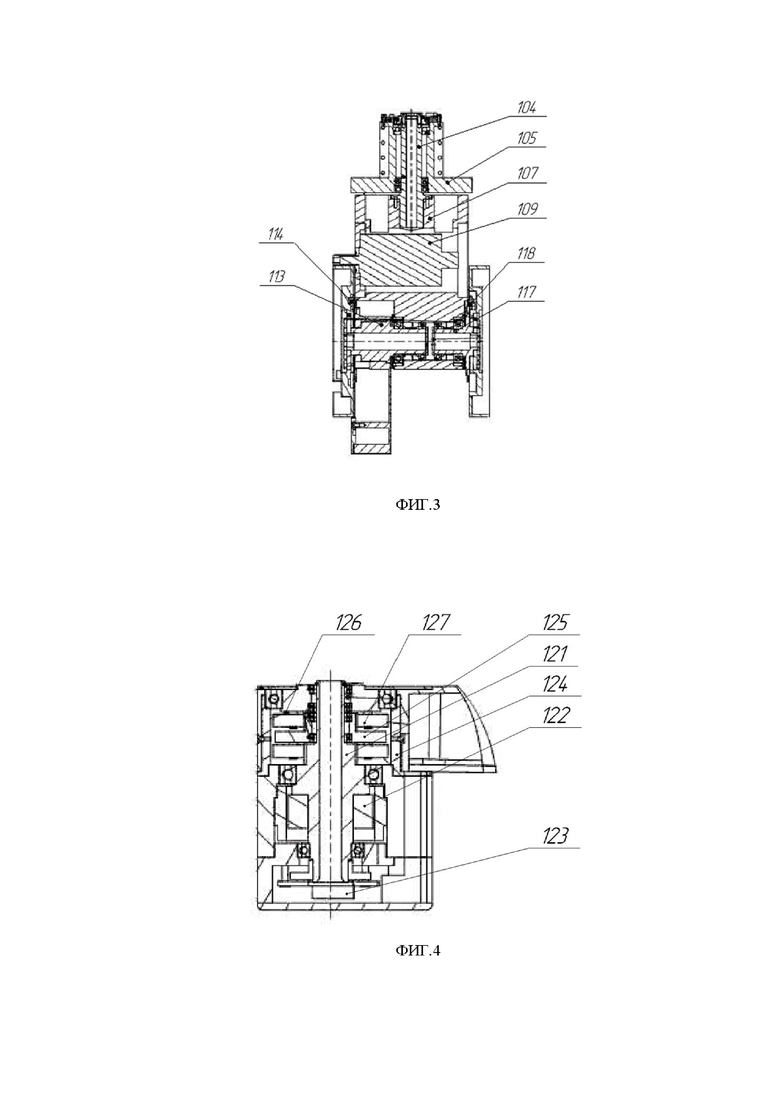
Фиг.3 – вид верхней части рычажного механизма в разрезе;
Фиг.4 –вид концевой части локтевого звена в разрезе;
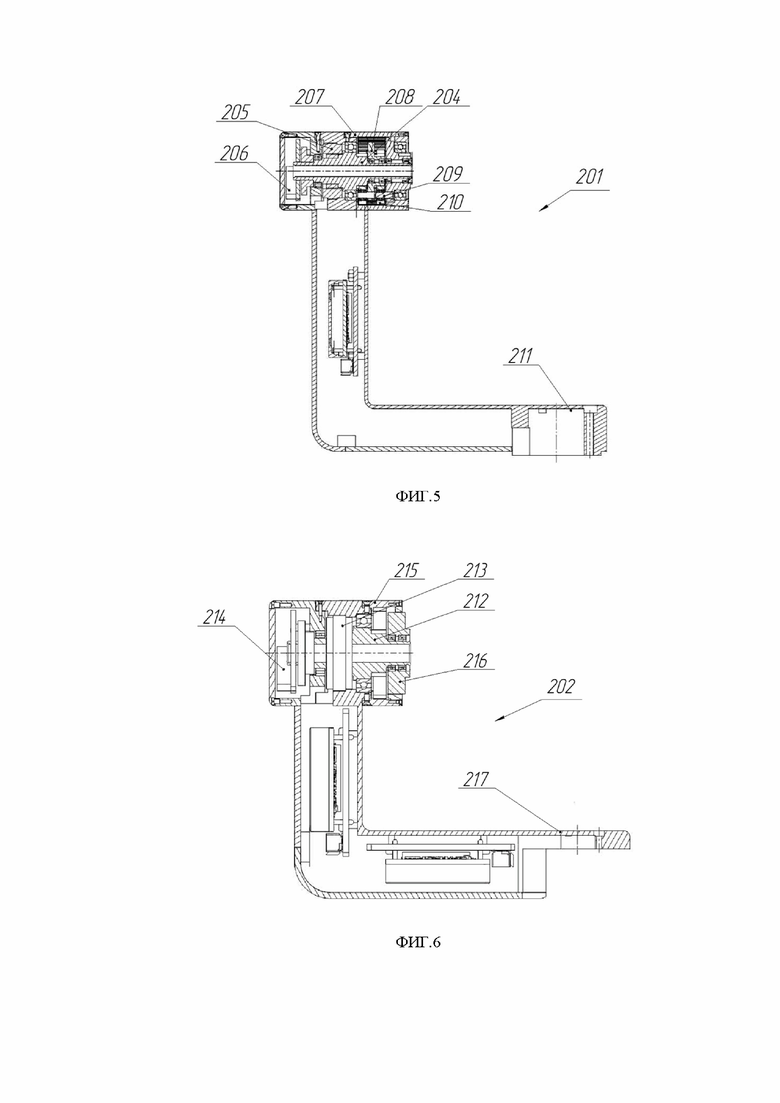
Фиг.5 –вид в разрезе первого звена запястья;
Фиг.6 – вид в разрезе второго звена запястья;
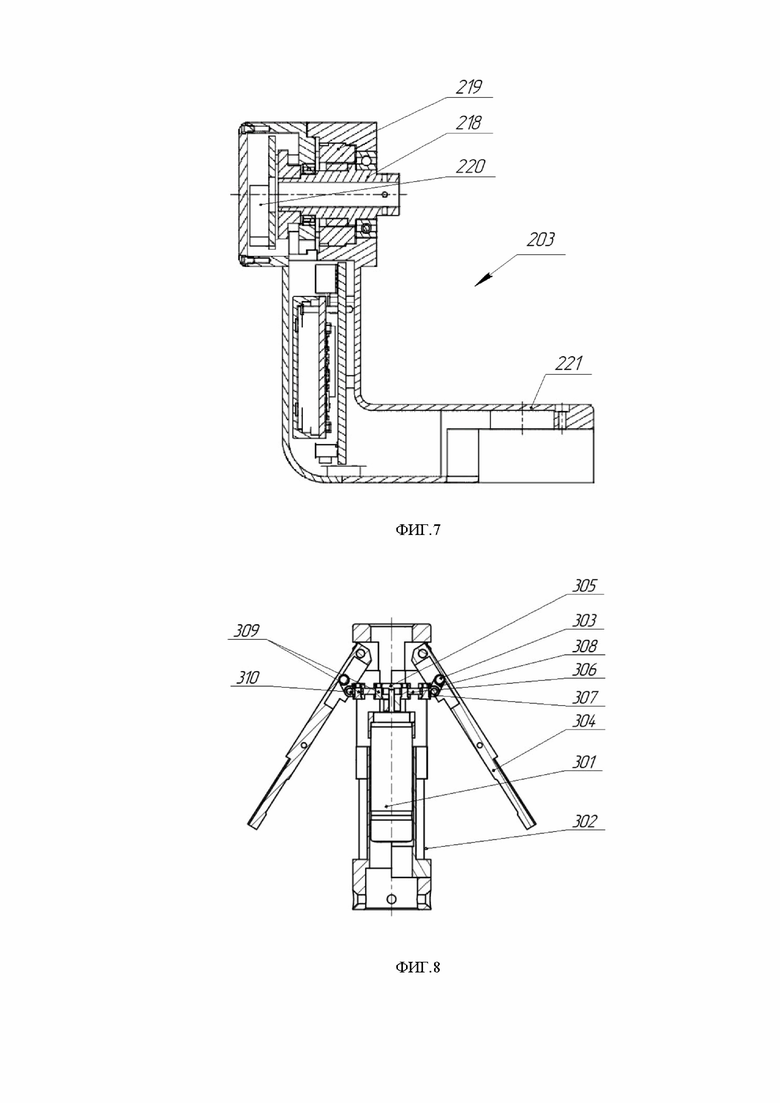
Фиг.7 – вид в разрезе третьего звена запястья;
Фиг.8 – вид в разрезе рукояти.
Джойстик по настоящему изобретению включает рычажный механизм 1, запястье 2 с рукоятью 3 и цифровой блок управления (не показан).
Рычажный механизм 1 включает локтевое звено 101 и плечо 102, соединенные посредством вала с возможностью поворота друг относительно друга, кронштейн 103, содержащий отверстие на верхнем торце для прохождения вертикального вала 104, на котором закреплен шкив 105. Шкив 105 выполнен в виде дуги окружности и выполнен заодно целое со стаканом с подшипниками, охватывающим вертикальный вал 104. На валу 104 установлен энкодер (не показан) для определения углового положения вала 104. На кронштейне 103 посредством кронштейна 106 установлен серводвигатель 107 с энкодером, на валу которого закреплен приводимый им во вращение барабан 108, соединенный посредством троса со шкивом 105. Трос закреплен на шкиве 105 посредством натяжных роликов таким образом, что при перемещении шкива 105 на валу 104, осуществляется намотка/размотка троса на барабане 108.
Кронштейн 103 выполнен с посадочными местами под серводвигатели 109 и 110. На валу серводвигателя 109 установлен барабан 111 соединенный посредством троса с правым шкивом 112, установленном на валу 113, соединенным с энкодером 114. Трос закреплен на шкиве 112 посредством натяжных роликов таким образом, что при перемещении шкива 112 на валу 113, осуществляется намотка/размотка троса на барабане 111. На правом шкиве 112 жестко закреплен второй конец плеча 102.
На валу серводвигателя 110 установлен барабан 115, соединенный посредством троса с левым шкивом 116, установленном на валу 117, соединенным с энкодером 118 Трос закреплен на шкиве 116 посредством натяжных роликов таким образом, что при перемещении шкива 116 на валу 117, осуществляется намотка/размотка троса на барабане 115. Шкив 116 соединен посредством вспомогательного звена 119 с локтевым звеном 101 на расстоянии от оси соединения первых концов локтевого звена 101 и плеча 102, при этом вспомогательное звено 119 жестко соединено со шкивом посредством оси 120.
Второй конец локтевого звена 101 жестко соединен с корпусом привода, содержащим, установленные на валу 121 серводвигатель 122, энкодер 123, двухступенчатый планетарный редуктор, включающий эпицикл 124, водило 125, соединенное посредством осей 126 с сателлитами 127. В корпусе локтевого звена 101 установлен контроллер (не показан). Указанный привод обеспечивает поворот запястья 2 относительно рычажного механизма 1.
Запястье 2 содержит три последовательных звена Г-образной формы 201, 202, 203 и рукоять 3.
Первое звено 201 запястья 2 выполнено Г-образной формы с возможностью поворота относительно локтевого звена 101 рычажного механизма 1 и включает на одном конце установленные на валу 204 сервопривод 205, энкодер 206, двухступенчатый планетарный редуктор, включающий эпицикл 207, водило 208 соединенное посредством осей 209 с сателлитами 210. На другом конце первого звена выполнено монтажное отверстие 211 для соединения с локтевом звеном 101.
Второе звено 202 запястья 2 выполнено Г-образной формы с возможностью поворота относительно первого звена 201 и включает установленные на валу 212 сервопривод 213, энкодер 214, планетарный редуктор, включающий эпицикл 215, водило 216, соединенное посредством осей с сателлитами (не показаны на чертеже). На конце звена 202 выполнен монтажный выступ 217 для соединения с первым звеном 201.
Третье звено 203 запястья 2 выполнено Г-образной формы с возможностью поворота относительно второго звена 202 и включает установленные на валу 218 сервопривод 219, энкодер 220. На конце звена 203 выполнен монтажный выступ 221 для соединения со вторым звеном 202.
Рукоять 3, соединенная с третьим звеном запястья 203, выполнена с возможностью поворота относительно третьего звена 203. Рукоять 3 включает электродвигатель 301 с абсолютным энкодером, размещенный в корпусе 302, и закрепленные на корпусе 302 посредством осей 303 лепестки 304, причем на валу электродвигателя 301 размещен центральный рычаг 305, соединенный через системы рычагов с лепестками 304. Электродвигатель 301 обеспечивает получение обратной связи от инструмента на лепестки 304 джойстика, а также получение данных об угле поворота лепестков 304 относительно нулевого положения. Электродвигатель 301 неподвижно закреплен в корпусе 302 посредством хомута и соединен с лепестками 304 посредством системы рычагов.
Центральный рычаг 305 закреплён на валу электродвигателя 301 и выполненный с возможностью поворота вокруг продольной оси рукояти 3, и соединен с лепестками 304 посредством систем рычагов, включающих последовательно расположенные рычаги 306, 307, 308 шарнирно соединенные друг с другом посредством осей 309. Рычаг 38 соединен с лепестками посредством оси 310.
Описание работы устройства
Заявляемое устройство работает следующим образом:
Оператор, находясь за стойкой хирурга, осуществляет управление манипулятором хирургического инструмента, размещенного на стойке пациента. Оператор держит рукоять таким образом, что его большой и указательный пальцы размещаются в лепестках 304. Оператор может осуществлять перемещение джойстика и его элементов следующим образом: поворот джойстика в целом относительно вертикального вала 104 (ось I); перемещение рычажного механизма вперед-назад и вверх-вниз за счет системы рычагов, при этом осуществляют перемещение рычажного механизма вперед-назад за счет поворота плеча 102 посредством правого шкива 112 на валу 113 (ось II), а перемещение вверх-вниз – за счет поворота локтевого звена 101 на валу (ось III), соединяющим его с плечом 102; поворот запястья 2 относительно локтевого звена 101 (ось IV), поворот звена 202 относительно звена 201 (ось V), поворот звена 203 относительно звена 202 (ось IV), поворот рукояти относительно звена 303 (ось VI), сжатие и разжатие лепестков 304.
При этом осуществляется не строго синхронное преобразование перемещения джойстика манипулятором в перемещение манипулятора хирургического инструмента. За счет использования цифровой обработки данных снимаемых с энкодеров, установленных на серводвигателях джойстика, а также данных поступающих от энкодеров манипулятора (обратная связь) осуществляется преобразование по определенному математическому алгоритму, позволяющему обеспечить интуитивность управления.
Данные от энкодеров поступают в соответствующий каждому энкодеру контроллер, затем на общий контроллер джойстика(«Мастер-контроллер»), откуда могут поступать напрямую на общий контроллер манипулятора («Мастер-контроллер») или сначала на общий сервер всего роботохирургического комплекса, а затем на контроллер манипулятора и далее на контроллеры приводов хирургического инструмента, которые подают сигнал на поворот браншей.
Перемещение джойстика посредством его поворота относительно оси I осуществляется за счет подвижного соединения вертикального вала 104 и шкива 105. При вращении вала 104 осуществляется перемещение соединенного с ним шкива 105. Указанное перемещение непрерывно фиксируется энкодером, установленным на валу 104 (не показан), преобразовывается в цифровой сигнал и передается в контроллер, затем на контроллер манипулятора и затем на контроллеры приводов инструмента которые подают сигнал на перемещение хирургического инструмента. При этом при перемещении инструмента происходит формирование сигнала обратной связи на серводвигатель 107. При отклонении углового положения вала 104 и скорости его перемещения подается команда на включение серводвигателя 107, вращение от выходного вала серводвигателя 107 передается на барабан 108, при этом на барабане 108 начинает наматываться или разматываться трос, вызывая смещение шкива 105 на необходимую величину. Подключение серводвигателей на джойстике позволяет облегчить движения звеньев джойстика посредством усиления моментов кручения.
В статичном состоянии плечо 102 и локтевое звено 101 находятся приблизительно в вертикальном и горизонтальном положении соответственно. Перемещение рычажного механизма 1 совместно с запястьем 2 вперед-назад осуществляется под воздействием руки оператора за счет шарнирного соединения плеча 102 с локтевым звеном 101 и поворота правого шкива 112, жестко соединенного с плечом 102, на валу 113. Энкодер 114, установленный на валу 113, фиксирует перемещение шкива 112 и в виде цифрового сигнала передает данные в контроллер. При отклонении углового положения вала 113 и скорости его перемещения подается команда на включение серводвигателя 109, вращение от выходного вала которого передается на барабан 111, при этом на барабане 111 начинает наматываться или разматываться трос, вызывая смещение шкива 112 на необходимую величину.
Перемещение рычажного механизма 1 вверх-вниз осуществляется также под воздействием руки оператора за счет шарнирного соединения плеча 102 с локтевым звеном 101 и поворота левого шкива 116, шарнирно соединенного со вспомогательным звеном 119, на валу 117. Энкодер 118, установленный на валу 117, фиксирует перемещение шкива 116, и в виде цифрового сигнала передает данные в контроллер. При отклонении углового положения вала 117 и скорости его перемещения подается команда на включение серводвигателя 110, вращение от выходного вала которого передается на барабан 115, при этом на барабане 115 начинает наматываться или разматываться трос, вызывая смещение шкива 116 на необходимую величину.
Поворот запястья 2 относительно локтевого звена 101 вокруг оси IV осуществляется под воздействием руки оператора за счет поворота запястья, шарнирно закрепленного на валу 121. Угол и скорость перемещения фиксируется энкодером 123. Отклонение параметров перемещения компенсируется включением серводвигателя 122, который передает вращение на сателлиты 127, находящиеся в зацеплении с ним и эпициклом 124 и вызывающие поворот закрепленного на осях 126 водила 125 на необходимую величину.
Аналогичным образом осуществляется поворот и регулирование параметров перемещения второго звена 202 относительно первого звена 201 вокруг оси V, поворот звена 203 относительно звена 202 вокруг оси IV.
Поворот рукояти 3 относительно звена 303 вокруг оси VI осуществляется при повороте кисти оператора. Угол поворота фиксируется и передается в контроллер энкодера 220, а отклонение параметров перемещения компенсируется включением серводвигателя 219, обеспечивающего поворот вала 218, на котором установлена рукоять 3, на необходимую величину.
При сжатии или разжатии лепестков 304 рукояти 3, сигнал об угле поворота лепестков с энкодера электродвигателя 301 привода лепестков, находящегося в цилиндрическом корпусе рукояти, а также сигнал с электродвигателя 301 об уровне силы тока поступают на его контроллер. После обработки поступает сигнал на перемещение браншей. При этом при движении браншей происходит формирование сигнала обратной связи на лепестки джойстика, который получает данные об уровне силы тока на электродвигателе привода в зависимости от сопротивления оперируемых тканей движениям браншей. Так, если при раскрытии или смыкании браншей сопротивление движению браншей возрастает, то сила тока тоже увеличивается (и наоборот), и сигнал обратной связи поступает на контроллер привода браншей и далее через контроллер манипулятора и контроллер джойстика на электродвигатель 301 лепестков 304 джойстика, при этом электродвигатель 301 своим движением против движения браншей с определенным крутящим моментом (зависит от сигнала) вызывает поворот центрального рычага 305, закрепленного на его валу, который поворачиваясь воздействует на рычаги 306, разворачивая их. Указанное перемещение последовательно передается на шарнирно связанные с рычагами 306 рычаги 307 и 308, вызывает смещение положения лепестков, тем самым создавая сопротивление движению лепестков. При этом хирург пальцами, держащими лепестки, ощущает сопротивление движению лепестков, как бы ощущая сопротивление оперируемой ткани движению браншей (или не ощущает, если бранши движутся без сопротивления).
Конструкция джойстика обеспечивает оператору свободу управления (интуитивное управление) хирургическим инструментом, обеспечивая комфортное положение руки даже при длительном ведении операции. Усилия, приложенные оператором, обрабатываются цифровым блоком управления, который обеспечивает обработку данных по определенному математическому алгоритму и передачу команды на манипулятор хирургического инструмента. Наличие энкодеров и серводвигателей позволяет усилить управляющие сигналы оператора при необходимости, а также не допустить отклонения хирургического инструмента от заданного положения, что обеспечивает безопасность ведения операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2017 |
|
RU2752456C2 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
Изобретение относится к медицинской технике, а именно к ведущему манипулятору роботохирургического комплекса. Ведущий манипулятор содержит цифровой блок управления, выполненный с возможностью приема и обработки данных от энкодеров узлов устройства, рычажный механизм, выполненный с возможностью поворота вокруг вертикальной оси и включающий выполненные с возможностью перемещения друг относительно друга плечо и локтевое звено, соединенные с соответствующими приводами. Локтевое звено соединено с запястьем, содержащим последовательно соединенные шарнирные звенья и подвижную рукоять с лепестками. Плечо и локтевое звено соединены со шкивами, выполненными с возможностью перемещения отдельными приводами. Шарнирные звенья запястья выполнены с возможностью перемещения приводами, включающими серводвигатель и планетарный редуктор. Рукоять соединена с выходным звеном запястья с возможностью поворота относительного него и содержит размещенный в корпусе электродвигатель с абсолютным энкодером и закрепленные на корпусе посредством осей лепестки. На валу электродвигателя размещен центральный рычаг, соединенный через системы рычагов с лепестками для передачи сопротивления на кисть хирурга. Техническим результатом является высокая степень маневренности ведущего манипулятора и обеспечение обратной тактильной связи хирургу для повышения безопасности проведения операции. 5 з.п. ф-лы, 8 ил.
1. Ведущий манипулятор роботохирургического комплекса, содержащий цифровой блок управления, выполненный с возможностью приема и обработки данных от энкодеров узлов устройства, рычажный механизм, выполненный с возможностью поворота вокруг вертикальной оси и включающий выполненные с возможностью перемещения друг относительно друга плечо и локтевое звено, соединенные с соответствующими приводами, при этом локтевое звено соединено с запястьем, содержащим последовательно соединенные шарнирные звенья и подвижную рукоять с лепестками, отличающийся тем, что указанные плечо и локтевое звено соединены со шкивами, выполненными с возможностью перемещения отдельными приводами, шарнирные звенья запястья выполнены с возможностью перемещения приводами, включающими серводвигатель и планетарный редуктор, рукоять соединена с выходным звеном запястья с возможностью поворота относительного него и содержит размещенный в корпусе электродвигатель с абсолютным энкодером и закрепленные на корпусе посредством осей лепестки, причем на валу указанного электродвигателя размещен центральный рычаг, соединенный через системы рычагов с лепестками для передачи сопротивления на кисть хирурга.
2. Ведущий манипулятор по п. 1, отличающийся тем, что содержит закрепленный на вертикальном валу шкив в виде дуги окружности с натянутым тросом, намотанным на барабан, установленный на выходном валу первого серводвигателя для управления поворотом рычажного механизма относительно вертикальной оси,
3. Ведущий манипулятор по п. 1, отличающийся тем, что плечо соединено со шкивом, размещенным на валу и соединенным посредством натянутого троса с барабаном, установленным на выходном валу второго серводвигателя.
4. Ведущий манипулятор по п. 1, отличающийся тем, что локтевое звено соединено посредством вспомогательного звена со шкивом, размещенным на валу и соединенным посредством натянутого троса с барабаном, установленным на выходном валу третьего серводвигателя.
5. Ведущий манипулятор по п. 1, отличающийся тем, что запястье включает три последовательно соединенных звена Г-образной формы, при этом первое звено соединено с локтевым звеном с возможностью поворота относительно него, а последнее звено соединено с рукоятью.
6. Ведущий манипулятор по любому из пп. 1-5, отличающийся тем, что серводвигатели снабжены энкодерами, выполненными с возможностью передачи цифровых данных о положении элементов устройства на контроллеры для обработки данных и направления команд на перемещение манипулятора хирургического инструмента роботохирургического комплекса, а также получения команд на запуск серводвигателей.
| WO 2021195264 A1, 30.09.2021 | |||
| WO 2022119740 A1, 09.06.2022 | |||
| KR 20180042762 A, 26.04.2018 | |||
| WO 2013018983 A1, 07.02.2013 | |||
| EP 3840682 A4, 20.10.2021. |
