Область техники, к которой относится изобретение
Данное изобретение относится к устройствам и способам управления трением в контактном сопряжении и в частности уменьшения трения в сопряжении с тканью человека.
Уровень техники
Скольжение устройства относительно ткани человека может задерживаться залипанием (статическим трением), обусловленным локальными поверхностными связями. Локальные поверхностные связи представляют собой сцепляющиеся выступы шероховатости поверхности, которые обусловливают фрикционную адгезию между двумя контактирующими поверхностями. Адгезия между поверхностями возникает вследствие нескольких факторов, включающих связи, образующиеся в сопряжении, механическое зацепление и зачастую капиллярные эффекты. Зацепляющиеся поверхностные выступы двух поверхностей (поверхностные связи) приводят к локальным зонам адгезии между двумя поверхностями.
Для многих применений желательно беспрепятственное скольжение устройства на поверхности ткани человека. Одной конкретной областью, где это желательно, является область медицинских или персональных устройств для ухода, в которых беспрепятственное скольжение на ткани человека имеет особое значение.
Если статическое трение остается неуправляемым, то оно может приводить к необходимости приложения больших боковых усилий к контактирующей ткани и вызывать значительный сдвиг ткани, прежде чем может быть осуществлено скольжение или плавное перемещение устройства относительно ткани. Часто может также возникать явление «прерывистого скольжения», при котором перемещение устройства относительно кожи систематически задерживается локальными максимумами статического трения и требует повторного применения больших усилий для возобновления скольжения. Это практически приводит к приложению значительного колебательного усилия к поверхности ткани, когда устройство перемещают по ней.
Эти явления обычно негативно влияют не только на функциональные возможности и на эффективность устройства, но и на удобство устройства для пользователя или пациента, к которому данное устройство прикладывают. Вследствие этого может возникать, например, повреждение или раздражение ткани.
Одним общеизвестным средством для решения проблем, вызываемых статическим трением, и обеспечения беспрепятственного скольжения является смазывание контактной поверхности влажным гидрофильным покрытием или смазкой. Однако влажные решения не всегда пригодны, в частности в случае электрических персональных устройств для ухода, прикладываемых к коже, когда введение воды может быть опасным или может препятствовать работе (например, электробритв). Кроме того, в некоторых случаях устранение натяжения ткани вообще нежелательно. Вернее желательной целью может быть одновременное локальное натяжение в сочетании с беспрепятственным общим направленным перемещением. Например, в случае бритв, некоторое локальное управляемое натяжение кожи может улучшать эффективность функционирования устройства. Кроме того, для некоторых процедур катеризации введение катетера может требовать беспрепятственного скольжения, тогда как особенности самой обработки могут иметь преимущество от фиксации ткани, вызываемой статическим трением.
В данной области техники известен ряд средств для управления динамическим трением, некоторые из которых основаны на концепции возбуждения плоскостных и/или внеплоскостных периодических деформаций в поверхности контакта. Например, реферат для Собрания американского физического общества (DFD08 Meeting of The American Physical Society, Gouder, K.Morrison,J.) раскрывает применение такой концепции для уменьшения сопротивления от трения в турбулентном пограничном слое. Однако данный способ направлен исключительно на использование для уменьшения сопротивления, т.е. динамического трения в отношении текучей среды и имеет ограниченную пользу для уменьшения статического трения на границе между двумя плотными слоями.
Документ US 2013/0030329 раскрывает средство для уменьшения динамического трения между медицинским устройством и тканью человека посредством возбуждения вибраций поверхностных акустических волн вдоль поверхности медицинского устройства.
Оба данных раскрытых способа основаны на концепции распространения бегущих волн или вибраций вдоль поверхности контактирующей плоскости устройства. Однако такие способы требуют возбуждения вибраций внутри корпуса всего устройства, чтобы обеспечить вибрации вдоль контактирующей поверхности. Это приводит к большому потреблению электроэнергии, которое увеличивает затраты и может также увеличить вес устройства (если потребуется батарейка большего размера) или снизить эффективность функционирования (если устройство служит более короткий период времени, прежде чем батарейка садится). Такие решения могут также создавать значительное неудобство для пользователя, поскольку вибрации ощущаются во всем устройстве и не направлены исключительно на контактирующую поверхность.
Кроме того, такой подход к уменьшению трения обеспечивает ограниченную гибкость в плане управления степенью уменьшения или регулирования трения для разных материалов поверхности. Локализованное управление в разных поверхностных участках в устройстве также невозможно, поскольку одинаковые вибрации естественно распространяются по всей контактирующей поверхности (и в действительности по всему устройству).
Поэтому существует потребность в усовершенствованных средствах для управляемого уменьшения статического трения между поверхностью приложения устройства и принимающей поверхностью внешнего тела.
Сущность изобретения
Изобретение определяется формулой изобретения.
В соответствии с аспектом изобретения, предлагается устройство управления трением для приложения к принимающей поверхности ткани человека, причем упомянутое устройство приспособлено для образования зоны сопряжения с упомянутой принимающей поверхностью, имеющей уменьшенное статическое трение, причем упомянутое устройство содержит:
контактную поверхностную конструкцию, содержащую множество контактных поверхностных участков для вхождения в контакт с упомянутой принимающей поверхностью; и
узел привода, приспособленный для управления относительным разделением упомянутых контактных поверхностных участков в зависимости от упругости упомянутой принимающей поверхности и одного или более поверхностных свойств упомянутой принимающей поверхности, так что величина разделения соответствует или превышает величину, которая может быть приложена к принимающей поверхности через контактные поверхностные участки без преодоления сил статического трения в зоне сопряжения.
Предлагаемое устройство управления трением приспособлено для приложения к участку ткани человека, после чего разделение приложенных контактных поверхностных участков вызывает натяжение в принимающей поверхности, к которой оно приложено. Упомянутое натяжение создается по меньшей мере в участке принимающей поверхности, перекрытом упомянутым множеством поверхностных участков, но может выходить за пределы до некоторой степени.
Величина вызываемого натяжения естественно зависит от величины относительного разделения, создаваемого между контактными поверхностными участками. Величину данного разделения выбирают так, чтобы вызывать в принимающей поверхности соответствующее натяжение, которое превышает натяжение, которое может поддерживаться контактными поверхностными участками без преодоления сил статического трения между упомянутыми участками и принимающей поверхностью.
Конкретная степень относительного разделения, необходимая для пребывания в данном состоянии, зависит как от упругих свойств принимающей поверхности ткани человека, так и от некоторых свойств материала поверхности слоя ткани (таких как степень шероховатости или гладкости).
Создание натяжения в принимающей поверхности естественно требует приложения бокового усилия к принимающей поверхности через контактные поверхностные участки (или приложения усилия, содержащего боковую составляющую). Контактные поверхностные участки приспособлены для приложения такого бокового усилия только пока они остаются статически соединенными с принимающей поверхностью посредством сил статического трения. По мере увеличения натяжения, вызываемого в упомянутом слое посредством разделения контактных участков, в упомянутом слое создается большее напряжение и соответствующее большее растягивающее усилие, которое должно быть ограничено поверхностными участками, чтобы поддерживать упомянутое разделение.
В некоторый момент боковое усилие, которое необходимо прикладывать для противодействия возрастанию растягивающего усилия в принимающей поверхности, превышает силы статического трения, удерживающие контактные поверхностные участки соединенными с принимающей поверхностью. В этот момент происходит «сдвиг», то есть достигается состояние, в котором дальнейшее приложение бокового усилия вынуждает поверхностные участки (или в действительности любые другие аналогично приложенные контактирующие элементы) скользить относительно принимающей поверхности. Степень разделения, требующаяся для достижения такого состояния, представляет собой степень натяжения, предусмотренную вариантами осуществления настоящего изобретения.
В тот момент, когда вызываемое разделение превышает разделение, которое может быть перенесено на принимающую поверхность через контактные поверхностные участки без преодоления сил статического трения, граничные поверхностные связи разрываются и/или предотвращается их надлежащее формирование. В результате значительно уменьшается статическое трение между натянутой принимающей поверхностью и любой поверхностью, с которой она входит в контакт (при поддержании данной степени натяжения/растяжения).
Упомянутое множество контактных поверхностных участков может, например, относиться к разным участкам одной единой поверхности или может относиться к поверхностям множества отдельных поверхностных элементов. В первом случае упомянутое множество поверхностных участков может относиться к множеству произвольно взятых участков поверхности. Данные произвольные участки могут быть образованы так, чтобы быть смежными или несмежными.
Разрыв локальных поверхностных связей может быть достигнут там, где контактные поверхностные участки разделены в зависимости от способности к растяжению принимающей поверхности, так, что величина относительного разделения больше чем величина, которая может быть обеспечена растяжением принимающей поверхности.
Упомянутый узел привода управляет относительным разделением контактных поверхностных участков. Управление относительным разделением осуществляется так, чтобы увеличивать от первого первоначального относительного разделения до второго, большего относительного разделения. Управление каждым из упомянутого множества поверхностных участков может осуществляться так, чтобы увеличивать его относительное разделение относительно каждого другого поверхностного участка. Таким образом, достигается растяжение по всей площади, перекрытой упомянутым множеством поверхностных участков.
В соответствии с по меньшей мере одной группой примеров, упомянутый узел привода приспособлен для управления относительным разделением контактных поверхностных участков в зависимости от коэффициента статического трения между контактными поверхностными участками и принимающей поверхностью, и модулем упругости принимающей поверхности. Относительное разделение можно увеличивать пропорционально соотношению этих двух величин. Данная величина обеспечивает одну меру натяжения, которую необходимо создавать в принимающей поверхности для разрыва поверхностных связей и инициирования сдвига (то есть вызывания состояния, в котором статическое трение в принимающей поверхности минимизировано). Упомянутая величина отражает состояние, в котором вызываемое натяжение в принимающей поверхности равно или даже больше, чем сила статического трения, действующая между принимающей поверхностью и каждым и упомянутого множества поверхностных участков.
Упомянутый узел привода, например, может быть приспособлен для управления относительным разделением между поверхностными участками так, чтобы увеличивать от первого разделительного расстояния до второго разделительного расстояния, при этом отношение второго расстояния к первому расстоянию находится в пределах от 1,001 до 1,01 или от 1,01 до 1,1 или больше чем 1,1.
Величина в пределах от 1,001 до 1,01 особенно пригодна для вызывания состояния сдвига на влажной коже.
Величина в пределах от 1,01 до 1,1 особенно пригодна для вызывания состояния сдвига на нормальной коже.
Величина больше 1,1 особенно пригодна для вызывания состояния сдвига на сухой коже.
В соответствии с по меньшей мере одной группой примеров, упомянутое множество поверхностных участков может быть образована посредством поверхности единого гибкого слоя, причем упомянутая поверхность слоя образует плоскость, и при этом упомянутый узел привода приспособлен для создания латерального натяжения в упомянутом слое в направлении, параллельном упомянутой плоскости, тем самым активизируя разделение упомянутого множества поверхностных участков.
В соответствии с данной группой примеров, упомянутыми контактными поверхностными участками могут считаться условные, произвольно установленные участки одного единого слоя. Упомянутые участки могут быть образованы так, чтобы быть смежными или пространственно разделенными и могут быть любого размера и в любом количестве. Посредством вызывания натяжения в гибком едином слое (т.е. расширения или растяжения упомянутого слоя) любые произвольно установленные участки упомянутого слоя будут вынуждены отделяться друг от друга. Когда упомянутый слой приводят в контакт с принимающей поверхностью (ткани человека), данное расширение слоя вызывает точно такое же расширение принимающей поверхности. Принимающая поверхность отслеживает расширение гибкого единого слоя. При этом по всей площади ткани человека, перекрытой гибкой единой поверхностью, создается (приблизительно) равномерное натяжение.
Такое вызываемое натяжение в принимающей поверхности ткани человека вызывает разрыв поверхностных связей (описанных выше) и соответственно уменьшение силы статического трения, действующей между приложенной единой поверхностью и принимающей поверхностью. В соответствии с идеальной моделью, сила статического трения, ощущаемая между этими двумя контактирующими слоями, уменьшается до величины, которая является незначительной, а это значит, что возможен почти беспрепятственный (общий) сдвиг или скольжение единой поверхности относительно слоя ткани человека. Общий сдвиг означает скольжение, или поступательное перемещение, всей единой поверхности относительно принимающей поверхности (в отличие от просто поступательного перемещения двух или более контактных поверхностных участков относительно принимающей поверхности).
Таким образом, как только осуществлено разделение между поверхностными участками и вызвано соответствующее натяжение в принимающей поверхности ткани человека, весь единый гибкий слой может быть приведен из неподвижного состояния в подвижное состояние, и передвинут или перемещен в любом заданном направлении относительно принимающей поверхности ткани человека, не сталкиваясь со значительными противодействующими силами статического трения.
Кроме того, как отмечено выше, создание латерального натяжения посредством описанного в данной заявке способа относительного разделения поверхностных участков позволяет, в соответствии с любым вариантом осуществления изобретения, получить по существу равномерное натяжение по всей площади, перекрытой контактными поверхностными участками. Упомянутое натяжение обычно равномерное не только по направлению, но и по величине. Осуществление равномерного натяжения особенно важно в случае уменьшения статического трения в относительно больших по площади зонах сопряжения, поскольку любая неравномерность может приводить к локальным максимумам в сопротивлении сдвигу, приводящим к так называемому «прерывистому скольжению», при котором затрудняется непрерывное перемещение упомянутой контактной поверхностной конструкции относительно принимающей поверхности, и перемещение должно возобновляться снова. Таким образом, возможность реализации относительно равномерного натяжения в относительно широкой зоне сопряжения является важным преимуществом настоящего изобретения с точки зрения эффективности противодействия сопротивлению статического трения.
Отмечается, что термин «латеральное натяжение» означает просто натяжение в плоскости параллельно единому гибкому слою. В других частях данного описания применительно к данной идее иногда может использоваться термин «натяжение сдвига».
Вызываемое натяжение в едином слое может быть в нескольких направлениях, параллельных плоскости, определяемой упомянутым слоем. Плоскость, определяемая упомянутым слоем, может представлять собой плоскость, определяемую главной поверхностью слоя, а может представлять собой плоскость, определяемую поверхностью слоя, содержащей упомянутое множество контактных поверхностных участков. Например, в более общем смысле она может также называться центральной поперечной плоскостью слоя.
В соответствии с одним или более примерами, описанный процесс натяжения принимающей поверхности может быть регулярно повторяющимся, чтобы позволять гибкому единому слою свободно перемещаться относительно принимающей поверхности, начиная или останавливая движение по желанию, и при этом каждое возобновление движения может быть достигнуто при одинаковой уменьшенной или по существу устраненной силе статического трения между упомянутым слоем и принимающей поверхностью ткани человека. В некоторых вариантах осуществления может быть предусмотрен контроллер, приспособленный для определения прекращения движения (например, посредством подсоединенного в рабочем состоянии датчика движения) и для инициирования разделения поверхностных участков в ответ. В других примерах может быть предусмотрен контроллер, приспособленный для управления периодическим разделением упомянутых поверхностных участков.
В соответствии с по меньшей мере одной группой вариантов осуществления, упомянутый узел привода может содержать один или более элементов чувствительного материала, приспособленных для деформирования в ответ на электрическое, термическое, магнитное или электромагнитное возбуждение. Чувствительные материалы (или «умные материалы») представляют сбой хорошо известный тип материалов, которые приспособлены для изменения своей формы в зависимости от внешних условий. Такое изменение формы может быть использовано для обеспечения функции приведения в движение.
В частности, упомянутый один или более элементов чувствительного материала могут, в некоторых примерах, быть механически связаны с упомянутым гибким единым слоем и выполнены так, что их деформация механически перемещает гибкий единый слой, вызывая упомянутое латеральное натяжение. Например, упомянутый один или более элементов реагирующего материала могут быть выполнены с возможностью взаимодействия так, чтобы соединять два противоположных конца гибкого единого слоя и деформироваться (в ответ на соответствующее возбуждение) таким образом, чтобы оттягивать упомянутые два конца друг от друга и тем самым вызывать в них латеральное натяжение. Это представляет собой только один пример, однако может быть также предусмотрена любая альтернативная пригодная конструкция, вызывающая натяжение в упомянутом слое.
В соответствии с другой группой примеров, упомянутый узел привода может быть заключен в единый гибкий слой, причем упомянутый слой выполнен из чувствительного материала, приспособленного для деформирования в ответ на приложенное возбуждение, чтобы тем самым вызывать латеральное натяжение в упомянутом слое в одном или более направлений, параллельных упомянутой плоскости, и следовательно активировать разделение упомянутого множества поверхностных участков поверхности слоя.
В этих примерах для осуществления разделения контактных поверхностных участков не требуется внешних активирующих элементов. Вернее сам гибкий единый слой частично состоит из чувствительных материалов и приспособлен для реагирования на соответствующее возбуждение посредством расширения или растяжения в одном или более направлений, параллельных плоскости, определяемой слоем. Такая конфигурация может обеспечить более компактное и/или легкое решение, поскольку не требуется специальных активирующих элементов. Это может обеспечить меньший форм-фактор. Это может также упростить, ускорить и/или удешевить изготовление упомянутого устройства, а также сделать его более простым для сборки или изготовления. Это позволяет также использовать более простые электронные схемы управления.
В соответствии с другой группой примеров, упомянутый узел привода может содержать один или более механических приводов, приспособленных для перемещения упомянутого единого гибкого слоя так, чтобы вызывать в нем латеральное натяжение в направлении, параллельном упомянутой плоскости, определяемой упомянутым слоем. Упомянутые механические приводы, например, могут быть связаны с противоположными концами слоя и приспособлены для приложения противоположных усилий так, чтобы вызывать натяжение в упомянутом слое, между упомянутыми противоположными концами. При этом может быть также использована любая другая пригодная конструкция. Механические приводы, например, могут быть не связаны с единым слоем или могут быть связаны с упомянутым слоем в более центральных точках.
По выбору, упомянутый узел привода может содержать механизм передачи энергии, приспособленный для приема в качестве входа внешнего источника кинетической энергии и передачи упомянутой кинетической энергии упомянутому одному или более механических приводов. Такая конструкция особенно пригодна для применений, в которых упомянутое устройство управления трением связано или прикреплено к контактирующей поверхности основного устройства или прибора, который создает локальное перемещение или вибрацию во время своего обычного функционирования. Это возможно, например, для бритвы или триммера. Здесь вибрирующее перемещение ножей бритвы или триммера может быть частично приспособлено механизмом передачи энергии актуаторного узла для использования источника кинетической энергии для приведения в движение контактных поверхностных участков. Данный вариант может быть также использован в комбинации с любым другим вариантом осуществления, описанным в данной заявке. Это фактически позволяет использовать основной источник питания бритвы или триммера для приведения в действие актуаторного узла без необходимости размещения электрических кабелей, проходящих между ними.
Для любого из вышеописанных примеров, упомянутый узел привода, независимо от того, содержит он элементы чувствительного материала или механические приводы, может быть приспособлен для осуществления или создания латерального натяжения в гибком едином слое в двух перпендикулярных направлениях, параллельных плоскости, определяемой упомянутым слоем.
В конкретных примерах, упомянутый единый гибкий слой может представлять собой прямоугольный слой. В других конкретных примерах, он может иметь замкнутую, закругленную форму, такую как круг, эллипс, или неправильную закругленную форму. В других примерах гибкий единый слой может принимать любую конкретную конфигурацию или форму, включая правильные формы или произвольные формы.
В соответствии с другой группой вариантов осуществления, упомянутая контактная поверхностная конструкция может содержать поверхности множества пространственно разделенных контактных элементов. Упомянутые контактные элементы могут представлять собой жесткие элементы с плоской или криволинейной контактной поверхностью. Упомянутые контактные элементы могут представлять собой очень маленькие, микроскопические элементы и могут быть выполнены и расположены с возможностью перемещения друг относительно друга в одном или более направлений. Упомянутый актуаторный узел приспособлен для осуществления увеличения разделительного расстояния между каждым из упомянутых контактных элементов. Упомянутые контактные элементы выполнены с возможностью по существу равномерного удаления друг от друга.
Такая конструкция обеспечивает большую свободу выбора материала для контактных поверхностных участков. В отличие от предыдущих примеров, материал необязательно должен обеспечивать двойную функцию гибкого расширения и контакта с тканью человека. Это обеспечивает более широкий выбор. Например, можно выбрать материалы, которые являются гидрофильными или гидрофобными, или можно выбрать материалы для обеспечения особой требуемой чистоты поверхности (т.е. обладающей особой шероховатостью или гладкостью).
В конкретных примерах, упомянутое множество поверхностных участков могут быть связаны или прикреплены к основной поверхности единого гибкого слоя, при этом упомянутый узел актуатора приспособлен для создания натяжения в упомянутом слое, чтобы тем самым осуществлять разделение (увеличение относительного разделения) между упомянутым множеством поверхностных элементов. В этом случае упомянутый узел актуатора может содержать механические актуаторы или элементы чувствительного материала, приспособленные для выполнения функции приведения в движение.
Упомянутый узел актуатора может содержать слой чувствительного материала, приспособленный для деформирования в ответ на электрическое, термическое, магнитное или электромагнитное возбуждение, причем упомянутая деформация вызывает латеральное натяжение в упомянутом слое в направлении, параллельном плоскости, определяемой слоем, и при этом упомянутое множество контактных элементов связаны с поверхностью упомянутого слоя так, что деформация слоя вызывает относительное разделение контактных элементов. По желанию, натяжение может быть вызвано в двух перпендикулярных направлениях, параллельных плоскости, определяемой слоем.
Упомянутый узел актуатора может содержать один или более механических актуаторов, приспособленных для физического перемещения упомянутого множества контактных элементов, чтобы вызывать относительное разделение между ними.
В любом из данных примеров, контактные элементы могут быть расположены так, что пространственное разделение сохраняется между всеми контактными элементами. В других примерах, по меньшей мере часть контактных элементов могут скользить друг относительно друга. В других примерах, упомянутое множество контактных элементов могут быть соответственно связаны друг с другом посредством упругого соединения, которое растягивается при относительном разделении элементов. Это может обеспечить удобное средство возврата элементов к первоначальной конфигурации. В некоторых примерах это может ускорять возврат элементов.
Кроме того, в соответствии с любым из данных примеров, элементы, контактирующие с кожей, могут быть приспособлены так, что максимальное вызываемое разделение между любыми двумя контактирующими элементами очень мало (например <<0,1 мм). Это гарантирует, что при относительном расширении элементов (чтобы вызывать растягивание кожи) могут быть предотвращены так называемые эффекты «выпирания», при которых кожа выступает в зазоры между элементами. Такое выпирание или выступание может приводить к дискомфорту для пользователя, поскольку после сближения элементов снова, выпяченные участки кожи могут быть зажаты между соседними элементами, что приводит к защемлению кожи. Выпирание можно предотвратить посредством поддержания максимального разделительного расстояния - а также максимального внешнего растяжения контактных элементов - достаточно малым.
В вышеприведенных примерах реагирующие материалы описаны в общем смысле. Однако в более конкретных примерах в качестве чувствительного материала может быть использован электроактивный полимерный материал.
В соответствии с по меньшей мере одной группой вариантов осуществления, упомянутое устройство управления трением может дополнительно содержать контроллер, приспособленный для управления упомянутым актуаторным узлом, а для осуществления периодического относительного разделения между поверхностными участками, так что относительное разделение периодически изменяется во времени. Посредством периодического приведения в движение поверхностных участков так, чтобы разделять друг от друга (увеличивать их разделительное расстояние) с пригодной частотой, можно обеспечить относительно произвольное общее стартстопное перемещение упомянутой контактной поверхностной конструкции относительно поверхности ткани человека, при этом гарантируя уменьшенное статическое трение между поверхностной конструкцией и тканью всякий раз, когда перемещение прекращается.
В соответствии с одной группой примеров, упомянутое устройство управления трением дополнительно содержит контроллер, приспособленный для управления упомянутым актуаторным узлом для осуществления относительного разделения между поверхностными участками, имеющего величина которого зависит от коэффициента статического трения между принимающей поверхностью и контактными поверхностными участками и также зависит от модуля упругости принимающей поверхности. Упомянутое устройство может дополнительно содержать один или более датчиков для регистрации модуля упругости принимающей поверхности ткани человека или для регистрации одного или более параметров, пригодных для определения модуля упругости. Упомянутое устройство может также содержать датчики, приспособленные для регистрации одного или более параметров поверхности, пригодных в частности для определения коэффициента статического трения между принимающей поверхностью и контактными поверхностными участками.
В соответствии с одним или более примерами, упомянутое устройство может дополнительно содержать датчик для обнаружения контакта упомянутого устройства с принимающей поверхностью ткани человека. Может быть также предусмотрен контроллер, приспособленный для инициализации разделения контактных поверхностных участков в ответ на обнаружение контакта с тканью человека.
В соответствии с другим аспектом изобретения, предлагается бритва или триммер, содержащий головную часть для контакта с кожей пользователя, причем упомянутая головная часть содержит устройство управления трением по любому предыдущему пункту.
В соответствии с другим аспектом изобретения, предлагается способ управления статическим трением в зоне сопряжения между контактной поверхностной конструкцией и принимающей поверхностью внешнего тела, причем упомянутая контактная поверхностная конструкция содержит множество контактных поверхностных участков для вхождения в контакт с упомянутой принимающей поверхностью внешнего тела, причем упомянутый способ включает:
активацию относительного разделения упомянутых контактных поверхностных участков в зависимости от упругости принимающей поверхности и одного или более поверхностных свойств принимающей поверхности, так что величина разделения соответствует или превышает величину, которая может быть приложена к принимающей поверхности через контактные поверхностные участки без преодоления сил статического трения в зоне сопряжения.
Краткое описание чертежей
Примеры изобретения будут подробно описаны ниже со ссылкой на сопроводительные чертежи, из которых:
Фиг.1 схематично показывает приложение бокового усилия к слою ткани человека и встречаемые соответствующие силы статического трения;
Фиг.2 схематично показывает приложение бокового усилия к слою ткани человека и встречаемые соответствующие силы статического трения, при этом упомянутый слой растянут в соответствии с вариантами осуществления изобретения;
Фиг.3 схематично показывает примерный единый гибкий слой, содержащий множество контактных поверхностных участков, которые включены в варианты осуществления настоящего изобретения;
Фиг.4 схематично показывает примерный единый гибкий слой, который растянут, чтобы разделять упомянутое множество контактных поверхностных участков;
Фиг.5 схематично показывает моделируемое физическое взаимодействие между контактной поверхностью гибкого контактного слоя и принимающей поверхностью ткани человека;
Фиг.6 показывает график, изображающий необходимое натяжение, которое нужно вызывать в принимающей поверхности ткани человека, чтобы инициировать состояние сдвига;
Фиг.7 схематично показывает примерный электроактивный полимерный слой, который является зажатым;
Фиг.8 схематично показывает примерный электроактивный полимерный слой, который не является зажатым;
Фиг.9 схематично показывает вид снизу первого примерного устройства управления трением, встроенного в головку бритвы;
Фиг.10 схематично показывает вид в разрезе упомянутого первого примерного устройства управления трением;
Фиг.11 схематично показывает примерный гибкий контактный слой, имеющий кольцеобразную форму;
Фиг.12 схематично показывает второе примерное устройство управления трением, встроенное в головку бритвы;
Фиг.13 схематично показывает третье примерное устройство управления трением, встроенное в головку бритвы, причем упомянутое устройство содержит конструкцию внешних актуаторов;
Фиг.14 схематично показывает четвертое примерное устройство управления трением, содержащее множество отдельных контактных элементов;
Фиг.15 схематично показывает пятое примерное устройство управления трением, встроенное в головку бритвы.
Подробное описание вариантов осуществления
Изобретение предлагает устройство управления трением для создания латерального натяжения (или растяжения) в поверхности ткани человека, к которой упомянутое устройство прикладывают, чтобы тем самым уменьшать статическое трение между упомянутым устройством и упомянутой поверхностью ткани человека. Упомянутое натяжение создается посредством актуаторного узла, приспособленного для осуществления относительного разделения множества контактных поверхностных участков упомянутого устройства, так что когда упомянутые участки прижимают к принимающей поверхности, упомянутое относительное разделение вызывает натяжение в по меньшей мере участке принимающей поверхности, попадающем между положениями приложенных участков.
Как было описано выше, упомянутое устройство имеет конкретное применение в случае устройств для контакта с кожей, в которых управляемое уменьшение статического трения может уменьшать повреждение или раздражение кожи. Поверхностное статическое трение на зоне сопряжения с кожей обычно высокое, требующее приложения относительно больших усилий для его преодоления, и к тому же вызывает нежелательно большое смещение кожи и расположенной под ней поверхностной ткани. Механическое повреждение поверхности, обусловленное преодолением статического трения и инициированием перемещения устройства, может вызывать раздражение кожи. Значительное смещение кожи и расположенной под ней ткани может вызывать повреждение или раздражение кожи.
Фиг.1 схематично показывает приложение бокового усилия 24 к слою кожной ткани 18, 20 человека посредством твердой поверхности 16 контакта для перемещения данной поверхности относительно упомянутого слоя ткани. Как показано, перемещению поверхности 16 контакта относительно ткани человека противодействуют силы статического трения в зоне 26 сопряжения между ними. Твердая поверхность 16 контакта входит в непосредственный контакт с плотным слоем 18 эпителия. Как показано, приложенное боковое усилие вызывает смещение эпителия 18 в направлении приложенного усилия 24, которое вызывает соответствующее растяжение или натяжения слоя мягкой ткани 20, расположенного под ним.
В правой части фиг.1 показан график зависимости величины противодействующей силы 30 трения, приложенной в зоне 26 сопряжения, от времени 28 (или расстояния скольжения твердой поверхности 16 контакта). Как показано, инициирование первоначального перемещения твердой поверхности 16 контакта требует приложения большого бокового усилия к эпителию 18, для того чтобы в полной мере преодолевать противодействующие силы статического трения. Однако, как можно также видеть из графика, непрерывное перемещение или скольжение поверхности 16 контакта относительно эпителия затрудняется постоянным возвратом поверхностных сил трения, которые колеблются по величине, поскольку твердый слой контакта вынужден многократно останавливаться и начинать перемещение. Каждая остановка требует повторного приложения первоначального бокового усилия для преодоления сопротивления трения и возобновления движения. Данный эффект известен как «прерывистое скольжение».
Для сравнения, фиг.2 схематично показывает приложение бокового усилия к слою ткани 18, 20 человека посредством поверхности 16 контакта, при этом принимающая поверхность эпителия 18 находится в растянутом состоянии в соответствии с вариантами осуществления настоящего изобретения, для того чтобы достигать состояния сдвига. В данном случае можно предположить, что растяжение достигается посредством расширения поверхности 16 контакта (как описано со ссылкой на ряд вышеприведенных примеров). Однако демонстрируемый эффект не ограничен таким случаем и могут быть точно так же использованы любые средства растяжения.
Как показано в соответствующем графике на фиг.2, в данном случае (когда поверхность натянута) величина противодействующих сил 30 трения, препятствующих началу перемещения, значительно уменьшена, а значит перемещение может осуществляться посредством приложения первоначального усилия, имеющего значительно уменьшенную величину. Это снижает вероятность, или по меньшей мере остроту, любого возникающего в результате повреждения ткани или раздражения кожи.
График на фиг.2 показывает также, что, по сравнению с вариантом, показанным на фиг.1, противодействующие силы трения, преодолеваемые для инициирования перемещения, не продолжают многократно возвращаться, а остаются на неизменном (низком) уровне. В результате предотвращается эффект прерывистого скольжения.
Хотя на фиг.1 и 2 показана проблема, решаемая посредством изобретения, со ссылкой на слой кожи 18, 20, необходимо понимать, что изобретение не ограничено использованием с кожной тканью и может быть с одинаковым успехом применено к любому другому слою ткани человека. Это может включать, например, внутренние ткани, такие как ткани стенок артерий, пищевода или кишечника, или внутренних органов.
Фиг.3 и 4 схематично показывают первое примерное устройство управления трением в соответствии с одним или более вариантами осуществления изобретения. Упомянутое устройство содержит единый слой 44, выполненный из гибкого материала, который приспособлен для выдерживания поперечного растяжения наружу из упомянутого слоя вдоль направлений, параллельных плоскости, определяемой нижней основной поверхностью 46 упомянутого слоя.
Нижняя основная поверхность 46 слоя образует контактную поверхность для вхождения в контакт с принимающей поверхностью ткани человека. Можно понять, что контактная поверхность 46 может быть условно разделена на множество произвольно установленных контактных поверхностных участков 40. В данном случае контактные поверхностные участки установлены так, чтобы образовать регулярную матрицу пространственно разделенных участков.
Фиг.3 и 4 соответственно показывают единый слой 44 в первоначальном недеформированном состоянии и в последующем деформированном (растянутом) состоянии. Как показано, в последующем растянутом состоянии, разделительное расстояние d между каждым из упомянутого множества контактных поверхностных участков 40 увеличено (до d+Δd). Когда к принимающей поверхности слоя ткани человека прикладывают упомянутый слой, вызывая его растяжение, относительное разделение упомянутого множества контактных поверхностных участков вызывает соответствующее растяжение принимающей поверхности. Управление величиной относительно разделения осуществляется так, чтобы вызывать в принимающей поверхности натяжение, величина которого равна или больше чем величина, которая может быть обеспечена до преодоления сил статического трения между двумя поверхностями (и соответственно достигается состояние сдвига).
Как было описано выше, можно понять, что величина относительного разделения контактных поверхностных участков 40, необходимая для достижения состояния сдвига в принимающей поверхности 18, зависит как от упругости принимающей поверхности ткани человека, так и от коэффициента статического трения между принимающей поверхностью и контактными поверхностными участками 40. Требуемая величина разделения может быть оценена посредством простой (идеализированной) модели, которая описывает принимающую поверхность 18 ткани человека как упругий слой с модулем упругости Е.
На фиг.5 показана упомянутая модель применительно к варианту осуществления, показанному на фиг.3 и 4, в котором контактные поверхностные участки образованы посредством одного гибкого единого слоя 44. При этом гибкий единый слой 44 так же смоделирован как упругий слой, входящий в контакт с принимающей поверхностью 18 ткани человека в зоне сопряжения, имеющий коэффициент статического трения μs и нагруженный нормальным усилием Fn приложения.
Упомянутый единый слой смоделирован как имеющий приложенное натяжение ε сдвига (в плоскости). Предполагается, что как единый слой 44, так и принимающая поверхность 18 могут деформироваться только в плоскости (т.е. в направлении, параллельном плоскости, определяемой/параллельной основным поверхностям слоев). Вследствие силы граничного статического трения между двумя слоями, принимающая поверхность ткани человека отслеживает расширение гибкого единого слоя 44, тем самым так же вызывая натяжение ε в принимающей поверхности.
Принимающая поверхность продолжает отслеживать расширение гибкого единого слоя только до тех пор, пока увеличение сдвигающего растягивающего усилия в принимающей поверхности не превышает силу статического трения, действующую в зоне сопряжения между двумя слоями. Как только растягивающее усилие превышает величину сил трения, происходит сдвиг, поскольку увеличение упругого растягивающего усилия в слое 18 будет преодолевать силу трения и позволять слою просто скользить относительно поверхности расширяющегося единого слоя.
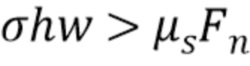
Смоделирована принимающая поверхность 18 ткани человека, имеющая вызванное напряжение σ. Таким образом, соответствующее растягивающее усилие FT, действующее в упомянутом слое, может быть определено как FT=σhw, где h и w - соответственно высота и ширина принимающей поверхности 18. Действующая сила статического трения имеет величину Fμ=μsFn. Таким образом, требование к сдвигу может быть выражено как:
 (1)
(1)
Поскольку принимающая поверхность 18 ткани человека имеет модуль упругости Е, и поскольку Е=σ/ε, неравенство (1) может быть выражено как:
 (2)
(2)
Неравенство (2) описывает требуемое натяжение, которое должна быть создано в принимающей поверхности 18 ткани человека, для того чтобы инициировать сдвиг, как функцию упругости принимающей поверхности и коэффициента статического трения между принимающей поверхностью и расширяющейся контактной поверхностной конструкцией 44.
Упомянутая модель основана на упрощающем допущении, что натяжение ε и напряжение σ сдвига приложены приблизительно равномерно по всей принимающей поверхности ткани человека, а также, что напряжение создается приблизительно равномерно по всему гибкому единому слою.
Отмечается, что неравенство (2) может быть также получено посредством использования того факта, что в случае статического трения сила трения μsFn равна растягивающей силе τwL, вызываемой в гибком едином слое 44. Следовательно, неравенство (1) может быть выражено как σhw > τwL. При этом можно использовать тот факт, что σ=Еε и τ=μsFn/wL. Отсюда непосредственно следует неравенство (2).
Упомянутая модель также предполагает, что модуль упругости гибкого единого слоя 44 значительно больше модуля упругости принимающей поверхности 18 ткани человека. На практике предполагают, что модуль упругости единого слоя 44 по меньшей мере на порядок больше модуля упругости принимающей поверхности 18. Неравенство в жесткости двух слоев гарантирует, что при заданной вызванной деформации большее напряжение всегда вызывается в гибком едином слое, а меньшее напряжение в принимающей поверхности ткани человека. Это гарантирует механически устойчивую систему в точке сдвига, поскольку в одном и другом слое не создается избыточного напряжения, где «избыточное напряжение» означает натяжение больше, чем произведение модуля упругости слоя и вызываемого в нем натяжения. Если бы слой ткани человека имел большую жесткость, чем расширяющийся слой 44, то в расширяющемся слое создавалось бы избыточное напряжение, потенциально приводящее к резкому быстрому расширению слоя в точке сдвига, когда избыточное (направленное наружу) натяжение высвобождается.
Однако несмотря на это, можно также достигнуть требуемого разрыва поверхностных связей и уменьшения статического трения в том случае, когда гибкий единый слой 44 имеет меньший модуль упругости по сравнению с принимающей поверхностью 18 ткани человека. Однако в этом случае при определении условия для сдвига, необходимо учитывать модуль упругости Е' и размеры w', h' гибкого единого слоя вместо аналогичных параметров принимающей поверхности ткани человека. В этом случае возникновение напряжения σ' в гибком едином слое обеспечивает ограничивающее условие, а не натяжение. Результатом является следующее условие для инициирования сдвига:
 =
= >
> 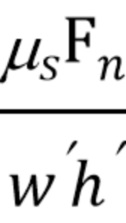 (3)
(3)
Отмечается, что хотя упомянутая вышеупомянутая модель создана с учетом расширения одного единого слоя 44, содержащего множество контактных поверхностных участков 40, данная модель никак не ограничена данным вариантом осуществления. Она может быть также применена к вариантам осуществления, в которых упомянутое множество контактных поверхностных участков 40 образовано, например, посредством множества пространственно разделенных контактных элементов. (Такой вариант осуществления будет более подробно описан ниже).
Таким образом, упомянутая модель может быть обобщена и преобразована с учетом требуемого увеличения разделительного расстояния d между контактными поверхностными участками 40 устройства управления трением, понимаемого в его самом широком смысле. Поскольку разделение контактных поверхностных участков точно отражает натяжение принимающей поверхности (по меньшей мере пока силы статического трения не преодолены), натяжение ε можно так же понимать как пропорциональное изменение разделительного расстояния Δdprop между каждым из (по меньшей мере подгруппы) упомянутого множества контактных поверхностных участков 40. Пропорциональное изменение в разделении означает абсолютное изменение разделительного расстояния, поделенное на первоначальное разделительное расстояние:
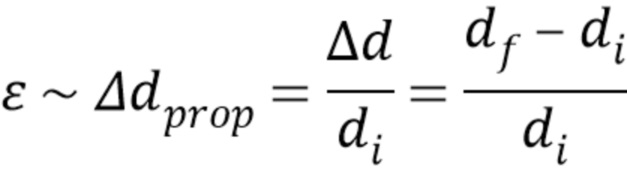 (4)
(4)
где Δd - абсолютное изменение разделительного расстояния,
df - конечное разделительное расстояние, и
di - первоначальное разделительное расстояние.
Характерными величинами натяжения, которые требуются для того, чтобы вызвать в принимающей поверхности ткани человека состояние сдвига, являются величины, которые легко могут быть достигнуты посредством реально существующих материалов, включающих чувствительные материалы.
График на фиг.6 показывает несколько примерных величин натяжения, которые необходимо вызвать, каждая соответствующая конкретному спектру или полосе предполагаемых физических и геометрических условий. Ось y изображает силу трения сопротивления, действующую по всей зоне сопряжения материала, равную μsFn (в Ньютонах). Ось х изображает упругую силу сопротивления в принимающей поверхности - равную Ewh (в Ньютонах). Каждая кривая на графике соответствует конкретной (примерной) величине натяжения, которая необходима для инициирования сдвига для любого из конкретных физических условий, показанных точками на данной линии.
Это следует из уравнения (2), которое показывает, что требуемое натяжение в любом случае больше чем μsFn/Ewh, т.е. градиент любой линии или кривой на графике, показанном на фиг.6.
Показанные кривые приведены только в качестве пояснения, как величины натяжения, которые являются реалистичными и возможными для достижения при использовании обычных материалов, включая обычные чувствительные материалы. Конечно, на графике можно дополнительно изобразить любое количество других кривых, расположенных между показанными кривыми, каждая для изображения другой величины возможного натяжения. Конкретные показанные кривые приведены исключительно для иллюстрации сущности изобретения.
Слева направо, первая кривая (или полоса) соответствует случаям, для которых деформация, требующаяся для стимулирования сдвига, равна 0,1 Н, вторая соответствует случаям, для которых требуемое натяжение равно 0,01, третья - случаям, для которых требуемое натяжение равно 1×10-3, четвертая - для натяжения, равного 1×10-4, и пятая - для натяжения, равного 1×10-5.
В качестве примера, обычный слой влажного кожного эпидермиса с упругостью Е=106 Па и площадью поперечного сечения=1×10-4 м, обладает упругим сопротивлением Ewh (принимая w*h=площадь поперечного сечения), равным 1 Н. Используя график на фиг.6, можно видеть, что сдвиг может быть вызван в таком слое при вызываемом натяжении, равном 0,1 (для примера), если μsFn в зоне сопряжения материала имеет величину, равную 0,1 Н. В то же время сдвиг может быть вызван при вызванной деформации, равной 0,001 (также для примера), если величина μsFn для зоны сопряжения равна 0,01 Н.
Такие величины μsFn вполне возможны и реальны в реалистичном случае, когда величины натяжения равны 0,1 и 0,01.
В другом примере обычный слой сухого кожного эпидермиса с упругостью Е=109 Па и площадью поперечного сечения=1×10-7 м, обладает упругим сопротивлением Ewh (принимая w*h=площадь поперечного сечения), равным 100 Н. Из графика можно видеть, что в данном случае сдвиг может быть вызван в таком слое вызываемым натяжением, равным 0,001, если μsFn=0,1, или натяжением, равным 0,01, если μsFn=1, или натяжением, равным 0,0001, если μsFn=0,01. Данные цифровые величины являются только примерными и приведены только для пояснения сущности изобретения.
Как описано в предыдущих разделах, растяжение или расширение гибкого единого слоя 44 может быть достигнуто в соответствии с несколькими разными механизмами.
В соответствии с по меньшей мере одной группой вариантов осуществления, слой 44 может содержать электроактивный полимер (Electroactive polymer - EAP), который приспособлен для расширения в ответ на приложение электрического возбуждения. Электроактивные полимеры (ЕАР) представляют собой перспективный класс материалов в области электрически чувствительных материалов. ЕАР могут быть более широко использованы в качестве датчиков и актуаторов и могут быть легко изготовлены в разных формах, обеспечивающих простое интегрирование в самые разные системы.
Разработаны материалы с характеристиками, такими как напряжение и натяжение активации, которые значительно улучшены за последние десятилетия. Технологические риски снижены до приемлемых уровней для разработки изделий, так что ЕАР становятся все более интересными с коммерческой и технической точки зрения. Преимущества ЕАР включают низкое энергопотребление, малый форм-фактор, гибкость, бесшумная работа, точность, возможность высокого разрешения, быстрое время реагирования и циклическая активация.
ЕАР устройство вообще может быть использовано в любом применении, в котором требуется малая величина перемещения элемента, на основе электрической активации. Аналогично данная технология может быть использована для регистрации малых перемещений. Данное изобретение в частности относится к актуаторам.
Использование ЕАР обеспечивает функции, которые прежде были невозможны, или представляет большое преимущество перед обычными решениями актуаторов благодаря сочетанию относительно большой деформации и силы в малом объеме или тонкого форм-фактора, по сравнению с обычными актуаторами. Кроме того, ЕАР обеспечивают бесшумную работу, точное электронное управление, быструю реакцию и широкий диапазон возможных частот активации, такой как 0-1 МГц, наиболее характерно ниже 20 кГц.
Устройства, использующие электроактивные полимеры, можно разделить на материалы, возбуждаемые полем, и материалы, возбуждаемые ионами.
Примеры ЕАР, возбуждаемых полем, включают пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе поливинилиденфторида) и диэлектрические эластомеры. Другие примеры включают электрострикционные графтполимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Примеры ЕАР, возбуждаемых ионами, являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (Ionic Polymer Metal Composites - IPMC) и углеродные нанотрубки (carbon nanotubes - CNT). Другие примеры включают ионные полимерные гели.
ЕАР, возбуждаемые полем, активируются электрическим полем посредством прямого электромеханического соединения. Они обычно требуют сильных полей (в Вольтах на метр), но малых токов. Полимерные слои обычно тонкие, чтобы поддерживать напряжение возбуждения как можно более низким. Ионные ЕАР активируются электрически индуцируемым перемещением ионов и/или растворителя. Они обычно требуют низких напряжений, но больших токов. Они требуют жидкой/гелеобразной среды электролита (хотя некоторые системы материалов могут также работать используя твердые электролиты). Оба класса ЕАР содержат множество членов семейства, каждый имеющий свои собственные достоинства и недостатки.
Первым значительным подклассом ЕАР, возбуждаемых полем, являются пьезоэлектрические и электрострикционные полимеры. Хотя электромеханические характеристики обычных пьезоэлектрических полимеров ограничены, прорыв в усовершенствовании данных характеристик привел к появлению релаксорных полимеров на основе PVDF, которые демонстрируют самопроизвольную электрическую поляризацию (ориентацию, возбуждаемую полем). Данные материалы могут быть предварительно деформированными для улучшенных характеристик в натянутом направлении (предварительная деформация приводит к лучшей ориентации молекул). Обычно используют металлические электроды, поскольку натяжения обычно происходят в умеренном режиме (1-5%). Могут быть также использованы другие типы электродов (такие как проводящие полимеры, смазки на основе черной сажи, гели или эластомеры и др.). Электроды могут быть непрерывными или сегментированными.
Другим подклассом ЕАР, возбуждаемых полем, являются диэлектрические эластомеры. Тонкая пленка данного материала может быть размещена между соответствующими электродами, образуя параллельный плоский конденсатор. В случае диэлектрических эластомеров, магнитное натяжение, вызываемое приложенным электрическим полем, приводит к натяжению на пленке, вынуждающему ее сжиматься по толщине и расширяться по площади. Характеристики натяжения обычно увеличиваются посредством предварительной деформации эластомера (требующей каркаса для сдерживания предварительной деформации). Натяжения могут быть значительными (10-300%). Это также ограничивает тип электродов, который может быть использован: для малых и умеренных натяжений могут быть использованы металлические электроды и электроды из проводящего полимера, для режимов большого натяжения обычно используют смазки на основе черной сажи, гели или эластомеры. Электроды могут быть непрерывными или сегментированными.
Первым значительным подклассом ионных ЕАР являются ионные полимер-металлические композиты (Ionic Polymer Metal Composites - IPMC). IPMC состоят из набухающей при растворении ионнообменной полимерной мембраны, расположенной между двумя тонкими металлическими или углеродными электродами, и требуют использования электролита. Обычными материалами электродов являются Pt, Gd, CNT, CP, Pd. Обычными электролитами являются водные растворы Li+ и Na+. При приложении поля катионы обычно перемещаются в сторону катода вместе с водой. Это приводит к реорганизации гидрофильных групп и расширению полимера. Натяжение в области катода приводит к напряжению в остальной части полимерной матрицы, приводящему к сгибу в сторону анода. Изменение полярности приложенного напряжения изменяет направление сгиба. Известными полимерными мембранами являются Nafion® и Flemion®.
Другим значительным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Актуатор из сопряженного полимера обычно состоит из электролита, расположенного между двумя слоями сопряженного полимера. Электролит используют для изменения степени окисления. Когда к полимеру через электролит приложен потенциал, электроны вводятся в или удаляются из полимера, вызывая окисление и восстановление. Восстановление приводит к сжатию, окисление к расширению.
В некоторых случаях, когда сам полимер обладает недостаточной проводимостью (по величине), добавляют тонкопленочные электроды. Электролит может представлять собой жидкий, гелеобразный или твердый материал (т.е. комплекс высокомолекулярных полимеров и солей металлов). Самыми распространенными сопряженными полимерами являются полипиррол (polypyrrole - PPy), полианилин (polyaniline - PANi) и политиофен (polythiophene - PTh).
Актуатор может быть также образован из углеродных нанотрубок (CNT), находящихся во взвешенном состоянии в электролите. Электролит образует с нанотрубками двойной слой, обеспечивающий инжекцию зарядов. Такая инжекция зарядов посредством двойного слоя считается основным механизмом в актуаторах на основе CNT. CNT действует как электродный конденсатор с зарядом, инжектируемым в CNT, который затем уравновешивается электрическим двойным слоем, образованным посредством перемещения электролитов к поверхности CNT. Изменение заряда на атомах углерода приводит к изменениям длины С-С связи. В результате можно наблюдать расширение и сжатие одной CNT.
Фиг.7 и 8 показывают два возможных рабочих режима для ЕАР устройства.
Упомянутое устройство содержит электроактивный полимерный слой 14, расположенный между электродами 10, 12 на противоположных сторонах электроактивного полимерного слоя 14.
Фиг.7 показывает устройство, которое не зажато. Напряжение используется для того, чтобы заставлять электроактивный полимерный слой расширяться во всех направлениях, как показано.
Фиг.8 показывает устройство, которое выполнено так, что расширение происходит только в одном направлении. Упомянутое устройство поддерживается посредством несущего слоя 16. Напряжение используется для того, чтобы заставлять электроактивный полимерный слой сгибаться или изгибаться.
Пример, показанный на фиг.8, может быть также зажатым, чтобы получить слой, который расширяется в плоскости, но только в одном направлении.
Электроды, электроактивный полимерный слой и подложка совместно образуют общую электроактивную полимерную структуру.
Природа данного перемещения, например, возникает из взаимодействия между активным слоем, который расширяется при активации, и пассивным несущим слоем. Для получения асимметричного сгиба вокруг оси, как показано, может быть применена ориентация молекул (растягивание пленки), вызывающая перемещение в одном направлении.
Расширение в одном направлении может быть результатом асимметрии в ЕАР полимере или может быть результатом асимметрии в свойствах несущего слоя, или комбинации того и другого.
Таким образом, ЕАР может быть приспособлен для деформирования в ответ на приложение электрического возбуждения таким образом, чтобы расширяться в стороны (т.е. вдоль по меньшей мере одного направления, параллельного плоскости, определяемой гибким единым слоем 44).
В качестве пояснения, фиг.9 показывает вид сверху (снизу) единого гибкого ЕАР слоя 44, включенного в головку 58 триммера бритвы. Фиг.10 показывает вид сбоку в разрезе того же ЕАР слоя 44. При использовании головка триммера бритвы обычно может подвергаться значительному общему перемещению, когда ее перемещают по значительной поверхности кожи. В целях данного примера, предполагается, что общее перемещение головки бритвы соответствует двунаправленной стрелке 62.
Во время работы ЕАР слой 44 электрически вынужден деформироваться в плоскости, вызывая латеральное, направленное наружу расширение в одном направлении. В «одном направлении» означает вдоль одного размера, как показано на фиг.9. Расширение может быть, например, параллельным или перпендикулярным общему направлению 62 скольжения, в зависимости от форм-фактора устройства. В примере, показанном на фиг.9 и 10, показано расширение, перпендикулярное общему направлению скольжения.
По желанию, может быть предусмотрен ЕАР слой с закругленными краями или криволинейный, для того чтобы предотвратить (внеплоскостное) зацепление краев ЕАР слоя за, например, волосы, неровности кожи или дугообразные волнистости в принимающей поверхности 18 ткани человека.
Расширение в плоскости ЕАР слоя вызывает состояние сдвига в принимающей поверхности, тем самым обеспечивая общее проскальзывание или скольжение головки бритвы в зоне сопряжения, имеющей значительно уменьшенное статическое трение. В соответствии с конкретными примерами, расширение слоя 60 на каждой стороне может находиться в пределах приблизительно 100-500 мкм. Данные чертежи приведены только в качестве пояснения и не являются необходимыми для реализации упомянутого варианта осуществления.
В соответствии с примерами, ЕАР слой 44 может быть вынужден деформироваться после начала общего перемещения. В этом случае упомянутое устройство управления трением может дополнительно содержать датчик для восприятия начала перемещения и контроллер, приспособленный для реагирования на принятые сигналы, генерируемые датчиком, вынуждая ЕАР слой 44 расширяться. Пригодные датчики включают, только в качестве примера, акселерометры, оптические датчики и/или датчики давления.
В соответствии с другими примерами, ЕАР слой 44 может быть вынужден деформироваться циклически или периодически во времени, т.е. вибрировать или колебаться с заданной частотой. Пригодные частоты могут включать - только в качестве примера - низкие частоты в пределах 1-5 Гц, предпочтительно в пределах 1-2 Гц. В этом случае может быть предусмотрен контроллер, приспособленный для подвода периодического по времени электрического возбуждения в ЕАР слой 44 с соответствующей частотой для возбуждения вибрации.
Фиг.10 показывает вид сбоку в разрезе упомянутого устройства управления трением. ЕАР слой 44 размещен в пределах линейной опорной несущей структуры 58 с низким коэффициентом трения. Фиксирующий элемент 68 обеспечивает соединительное или фиксирующее средство для прикрепления ЕАР слоя к несущей конструкции. Данный элемент может представлять собой часть линейной опорной структуры 58 или отдельный элемент, используемый для удерживания их вместе.
Упомянутая линейная опорная структура предотвращает потенциальное выпучивание ЕАР слоя как во время, так и после деформации. Однако в соответствии с некоторыми вариантами осуществления вместо такой конструкции может быть использована предварительная деформация ЕАР слоя и защемление или иное закрепление каждого конца упругим соединением. Возбуждение ЕАР растягивает слой, но он остается в натяжении, уменьшая риск выпучивания.
Хотя в примере, показанном на фиг. 9 и 10, использован прямоугольный слой электроактивного полимера, в других примерах могут быть использованы альтернативные конфигурации и формы ЕАР слоя. Фиг.11 показывает, например, примерный ЕАР слой, имеющий кольцеобразную форму. В данном примере кольцеобразный ЕАР слой 44 приспособлен для расширения в радиальном направлении, как показано стрелкой 72. Такая форма может быть предпочтительна, например, для применения в роторной бритве с круглыми триммерными головками. В этом случае расширение 72 может быть перпендикулярно круговому движению триммерных лезвий или быть либо перпендикулярно, либо параллельно общему перемещению триммерной головки относительно кожи пользователя.
Фиг.12 показывает другой пример ЕАР слоя 44, включенного в бритвенную головку 58. Данный пример функционально аналогичен примеру, показанному на фиг.9 и 10, но содержит ЕАР слой, приспособленный для осуществления плоскостного расширения в двух перпендикулярных направлениях. Двунаправленное расширение может обеспечить повышенную эффективность по сравнению с однонаправленным расширением, поскольку некоторые зацепляющие поверхностные элементы, такие как волосы или линии кожи, могут быть нечувствительными к расширению только в одном направлении.
Материалы, пригодные для ЕАР слоя известны. Электроактивные полимеры включают, помимо прочих, подклассы: пьезоэлектрических полимеров, электромеханических полимеров, релаксорных ферроэлектрических полимеров, электрострикционных полимеров, диэлектрических эластомеров, жидкокристаллических эластомеров, сопряженных полимеров, ионных полимер-металлических композитов, ионных гелей и полимерных гелей.
Подкласс электрострикционных полимеров включает, помимо прочих:
поливинилиденфторид (polyvinylidene fluoride - PVDF), сополимеры винилиденфторида с трифторэтиленом (polyvinylidene fluoride-trifluoroethylene - PVDF-TrFE), сополимеры винилиденфторида, трифторэтилена и хлорфторэтилена (polyvinylidene fluoride-trifluoroethylene-chlorofluoroethylene - PVDF-TrFE-CFE), сополимеры винилиденфторида, трифторэтилена и хлортрифторэтилена (polyvinylidene fluoride-trifluoroethylene-chlorotrifluoroethylene - PVDF-TrFE-CTFE), сополимеры винилиденфторида и гексафторпропилена (polyvinylidene fluoride-hexafluoropropylene - PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает, помимо прочих: акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает, помимо прочих:
полипиррол, поли-3,4-этилендиокситиофен, поли(р-фениленсульфид), полианилины.
Ионные устройства могут быть основаны на ионных полимер-металлических композитах (ionic polymer-metal composite - IPMC) или сопряженных полимерах. Ионный полимер-металлический композит (IPMC) представляет собой искусственный композиционный наноматериал, который демонстрирует поведение искусственной мышцы под действием приложенного напряжения или электрического поля.
Более подробно, IPMC состоят из ионного полимера, такого как Naflon или Flemion, поверхности которого химическим или физическим способом покрывают проводниками, такими как платина или золото, или углеродными электродами. Под действием приложенного напряжения миграция и перераспределение ионов вследствие приложенного напряжения в полосе IPMC приводят к изгибной деформации. Упомянутый полимер представляет собой набухающую при растворении ионнообменную полимерную мембрану. Поле вынуждает катионы перемещаться в сторону катода вместе с водой. Это приводит к реорганизации гидрофильных групп и расширению полимера. Натяжение в поверхности катода приводит к напряжению в остальной части полимерной матрицы, приводящему к сгибу в сторону анода. Изменение полярности приложенного напряжения изменяет направление сгиба.
Если покрытые электроды размещены в несимметричной конфигурации, то приложенное напряжение может вызывать все виды деформаций, такие как деформация скручивания, свертывания, кручения, вращения и несимметричного изгиба.
Во всех этих примерах могут быть предусмотрены дополнительные пассивные слои для оказания влияния на электрические и/или механические свойства ЕАР слоя в ответ на приложенное электрическое поле.
ЕАР слой каждого устройства может быть размещен между электродами. Электроды могут быть растягиваемыми, так что они отслеживают деформацию слоя ЕАР материала. Материалы, пригодные для электродов, также известны и могут быть выбраны, например, из группы, состоящей из тонких металлических пленок, таких как золото, медь или алюминий, или органических проводников, таких как черная сажа, углеродные нанотрубки, графен, полианилин (poly-aniline - PANI), поли(3,4-этилендиокситиофен)(PEDOT), например, сополимер(3,4-этилендиокситиофена) и стиролсульфоната (PEDOT:PSS). Могут быть также использованы металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (polyethylene terephthalate - PET), например, с алюминиевым покрытием. Использование ЕАР для создания расширяющегося слоя, как показано на фиг.3 и 4, является несущественным. В соответствии с по меньшей мере одной группой альтернативных примеров, может быть предусмотрен расширяющийся слой, содержащий самые разные чувствительные материалы. Другие примеры чувствительных материалов включают сплавы с памятью формы, которые обладают свойством деформироваться, принимая конкретную форму памяти в ответ на приложение термического возбуждения. Например, термическое возбуждение может быть приложено посредством специального нагревательного элемента или может быть достигнуто посредством нагрева джоулевым теплом посредством прямого приложения тока к сплаву с памятью формы.
Другие примеры включают: материалы с магнитным изменением формы, приспособленные для деформирования в ответ на приложение некоторых магнитных возбуждений; фотомеханические материалы, приспособленные для изменения формы в ответ на изменение уровней освещенности; и полимеры, чувствительные к рН. Специалисту в данной области техники хорошо известно также множество других материалов, каждый из которых приспособлен для деформирования в ответ на приложение любого электронного, магнитного или электромагнитного возбуждения.
Концепция настоящего изобретения, осуществленная в пояснительном примере, показанном на фиг.9-12, по выбору ограничена использованием чувствительных материалов для обеспечения расширения единого гибкого слоя 44. В соответствии с по меньшей мере одной группой альтернативных примеров, единый гибкий слой может быть предусмотрен в сочетании с группой механических актуаторов, приспособленных для манипулирования упомянутым слоем, чтобы вызывать в нем натяжение в направлении, параллельном плоскости, определяемой упомянутым слоем.
Один пример такого варианта осуществления показан на фиг.13, который схематично показывает примерное устройство управления трением, включенное в головку 58 бритвы. Упомянутое устройство управления трением содержит пассивный упругий слой 44, расположенный между двумя параллельными рядами триммерных лезвий 74. Упругий слой 44 в каждом конце соединен с соответствующим внешним актуаторным элементом 78. Актуаторные элементы выполнены с возможностью приведения в действие так, чтобы прикладывать соответствующие противоположные боковые усилия к каждому концу пассивного упругого слоя 44, чтобы тем самым вызывать растягивание слоя в боковом направлении.
В других примерах, актуаторы 78 могут быть выполнены с возможностью приведения в действие так, чтобы прикладывать усилия в двух направлениях каждый, чтобы тем самым вызывать двунаправленное натяжение сдвига в слое (двух перпендикулярных направлениях, параллельных плоскости, определяемой слоем).
В других примерах может быть предусмотрено больше двух актуаторов 78, чтобы вызывать натяжение в множестве направлений в плоскости.
Внешние актуаторы могут состоять из механических или механотронных актуаторов, или могут состоять из активирующих элементов, содержащих чувствительный материал, приспособленный для деформирования в ответ на возбуждение таким образом, чтобы прикладывать противоположные, направленные наружу усилия к слою 44 и вызывать латеральное натяжение сдвига.
В соответствии с другими примерами, внешние актуаторы 78 могут быть заменены или включены в механизм передачи энергии, приспособленный для использования кинетической энергии, генерируемой или реализуемой лезвиями 74 бритвы, для того чтобы вызывать боковое растяжение слоя 44.
Пригодные материалы для пассивного упругого слоя 44 включают (только в качестве примера) силиконовые эластомерные материалы, имеющие структуру поверхности с низким коэффициентом трения, или текстильные материалы, сочетающие в себе свойства растягиваемости и низкого поверхностного трения.
В каждом из вышеописанных вариантов осуществления, предусмотрена контактная поверхностная конструкция, содержащая одну единую поверхность 44, которая приспособлена для расширения, чтобы тем самым вызывать относительное разделение между множеством контактных поверхностных участков 40. Однако в соответствии с другой группой примеров, упомянутое множество контактных поверхностных участков может быть образовано посредством контактных поверхностей множества отдельных, пространственно разделенных контактных элементов.
Фиг.14 показывает один простой пример такого варианта осуществления. Упомянутая конструкция содержит матрицу контактных элементов 82, которые механически соединены с нижней основной поверхностью гибкого слоя 45. Каждый контактный элемент 82 содержит нижнюю контактную поверхность. Контактные поверхности упомянутого множества элементов образуют контактную поверхностную конструкцию для упомянутого устройства.
Слой 45 приспособлен для расширения - либо посредством конструкции внешних актуаторов (не показанных), либо посредством чувствительного материала, встроенного в упомянутый слой - для того чтобы вызывать натяжение в плоскости вдоль по меньшей мере одного направления упомянутого слоя. Упомянутое натяжение вызывает относительное разделение упомянутых механически соединенных контактных элементов 82 и соответственно разделение упомянутого множества контактных поверхностей элементов 82.
Элементы 82 могут представлять собой очень малые, микроразмерные элементы. Это может увеличивать натяжение сдвига на зоне сопряжения между упомянутыми элементами и принимающей поверхностью ткани человека.
Как показано с правой стороны фиг.14, упомянутое множество контактных элементов могут быть расположены в соответствии с несколькими разными конфигурациями. В частности, контактные элементы 82 могут быть расположены так, что 1) между ними сохраняется небольшое пространственное разделение, даже когда гибкий слой не подвергается расширению; 2) упомянутые элементы могут перемещаться или скользить один относительно другого в некоторой степени; или 3) между упомянутыми элементами существует упругое соединение, которое растягивается при относительном перемещении упомянутых элементов.
Преимуществом конструкции, содержащей множество контактных элементов, является большая степень выбора в свойствах материалов, контактирующих с кожей. Например, могут быть использованы гидрофильные или гидрофобные материалы или материалы с конкретной чистотой поверхности.
Хотя конструкция, показанная на фиг.14, показывает множество контактных элементов, соединенных с расширяющимся гибким слоем, в соответствии с другими примерами упомянутые элементы могут быть механически закреплены так, что они способны перемещаться относительно друг друга. Это может сделать конструкцию (2) более практически осуществимой.
В соответствии с другой группой вариантов осуществления, может быть предусмотрено устройство управления трением, содержащее узел из двух расширяющихся поверхностных элементов, приспособленных для совместного расширения так, чтобы вызывать натяжение в участке контакта ткани человека. Фиг.15 показывает пример такой конструкции.
В вышеприведенных примерах, в которых используется расширяющийся (единый) слой 44, расширение ткани человека достигается посредством использования только одного расширяющегося элемента. Однако для очень многих применений может быть необходимо или желательно вызывать натяжение в относительно большом участке ткани человека. В таком случае один расширяющийся элемент 44 может оказаться непригодным, неэффективным или нежелательно дорогим. Это в частности имеет место для вариантов осуществления, использующих расширяющийся ЕАР слой.
Кроме того, чем больше становится один расширяющийся слой, тем с большим нормальным усилием нужно прикладывать расширяющийся слой к поверхности ткани человека для поддержания эффективного контакта. Это в свою очередь увеличивает необходимое растягивающее усилие, которое необходимо вызывать в расширяющемся слое, для того чтобы растягивать кожу под ним. Эти факторы могут увеличивать как сложность приведения в действие устройства (поскольку трудно поддерживать такое усилие равномерно на таком обширном участке), так и риск раздражения или повреждения кожи.
Для решения данных проблем, вариант осуществления, показанный в примере на фиг.15, содержит узел из двух расширяющихся ЕАР элементов 78, расположенных в каждом из двух концов бритвенной головки 58, между двумя рядами параллельных режущих лезвий 74. Такая конструкция уменьшает нормальное давление, оказываемое на принимающую поверхность кожи, к которой прикладывают бритву. Это соответственно также уменьшает усилие растяжения, которое нужно вызывать в слоях 78 для осуществления расширения кожи под ними.
В соответствии с данным вариантом осуществления может быть дополнительно предусмотрен контроллер, приспособленный для выдачи синхронизированных сигналов управления в два расширяющихся элемента 78, для того чтобы вызывать одновременное и взаимодополняющее расширение упомянутых двух элементов (т.е. гарантировать, что элементы расширяются и сжимаются одновременно). Кроме того, упомянутый контроллер может управлять выдаваемыми сигналами так, чтобы гарантировать соответствующие расширения упомянутых двух элементов 78 в противоположных (т.е. взаимодополняющих) направлениях.
Для вариантов осуществления настоящего изобретения, основная функция изделия зависит от (локального) перемещения ткани человека или активации зоны контакта с тканью. В таких применениях, ЕАР актуаторы, например, обладают уникальными преимуществами главным образом за счет малого форм-фактора, гибкости и высокой плотности энергии. Таким образом, ЕАР и фоточувствительные полимеры могут быть легко интегрированы в мягкие, объемные и/или миниатюрные изделия и зоны сопряжения для обеспечения требуемой функции управления трением.
Вышеописанный пример бритвы с адаптивной бритвенной головкой является только одним возможным примером. Другими примерами таких применений являются:
Дыхательные устройства с маской контакта с пациентом, которая содержит чувствительный полимер на основе активной прокладки или уплотнения для обеспечения уменьшенного воздействия на кожу;
Бытовые электронные устройства или сенсорные планшеты, которые предусматривают локальную тактильную обратную связь через систему чувствительных полимерных преобразователей, которые встроены в или около интерфейса пользователя;
Катетеры с поверхностями с управляемым трением для обеспечения беспрепятственного скольжения катетера через анатомические полости, такие как артерии или пищеварительную систему.
Другие изменения в раскрытых вариантах осуществления могут быть понятны и осуществлены специалистами в данной области техники при реализации заявленного изобретения, на основе изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов и этапов, а термины в единственном числе не исключают множества. Только тот факт, что некоторые признаки упомянуты во взаимно разных зависимых пунктах формулы, не указывает на то, что не может быть успешно использована комбинация данных признаков. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АНАЛИЗА ПОВЕРХНОСТИ И МЕТОД АНАЛИЗА УПРУГОСТИ ВОСПРИНИМАЮЩЕЙ ПОВЕРХНОСТИ | 2017 |
|
RU2748878C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2728492C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОГО И/ИЛИ РАДИАЦИОННОГО СИГНАЛА В ПЕРЕМЕЩЕНИЕ ИЛИ НАОБОРОТ | 2016 |
|
RU2727067C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| УСТРОЙСТВО С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2720478C2 |
| БРИТВЕННЫЙ ПРИБОР ДЛЯ ВОЛОС | 2015 |
|
RU2700885C2 |
| ИСПОЛНИТЕЛЬНОЕ ИЛИ СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2705647C2 |
| УСТРОЙСТВО АКТУАТОРА НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2723889C2 |
| ДАТЧИК ПОТОКА И СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2017 |
|
RU2768159C2 |
| УСТРОЙСТВО ГЕНЕРИРОВАНИЯ ЭНЕРГИИ И СПОСОБ ГЕНЕРИРОВАНИЯ ЭНЕРГИИ | 2016 |
|
RU2689150C1 |
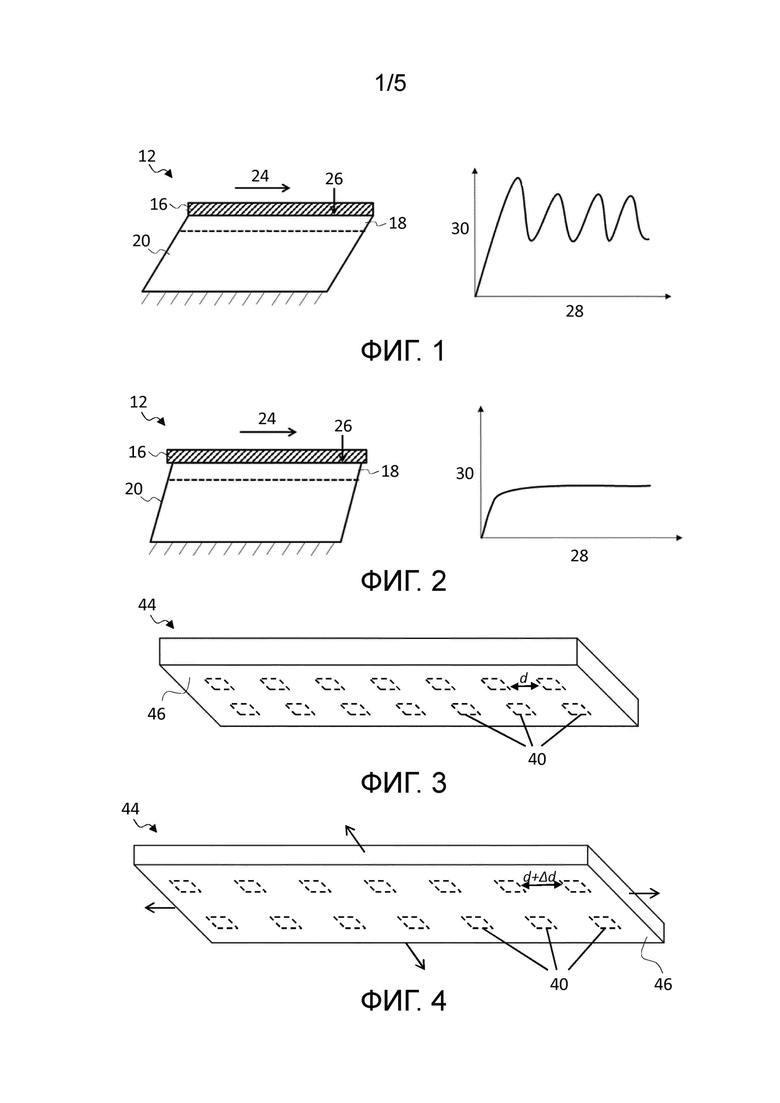
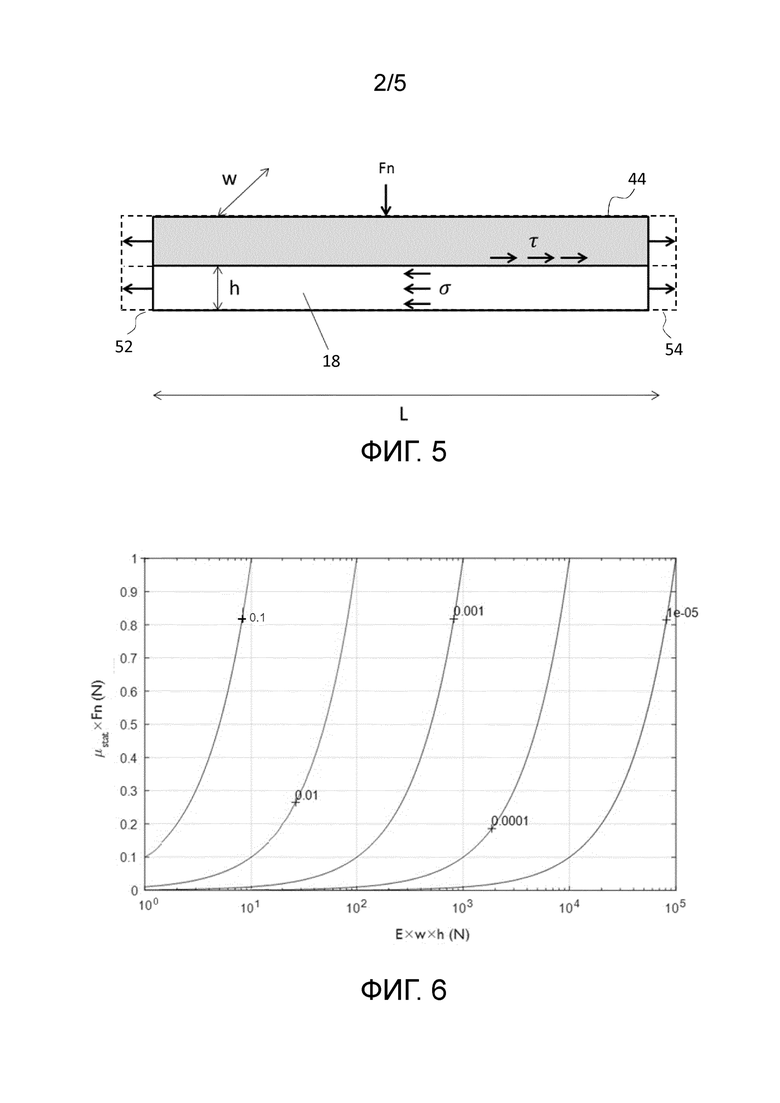
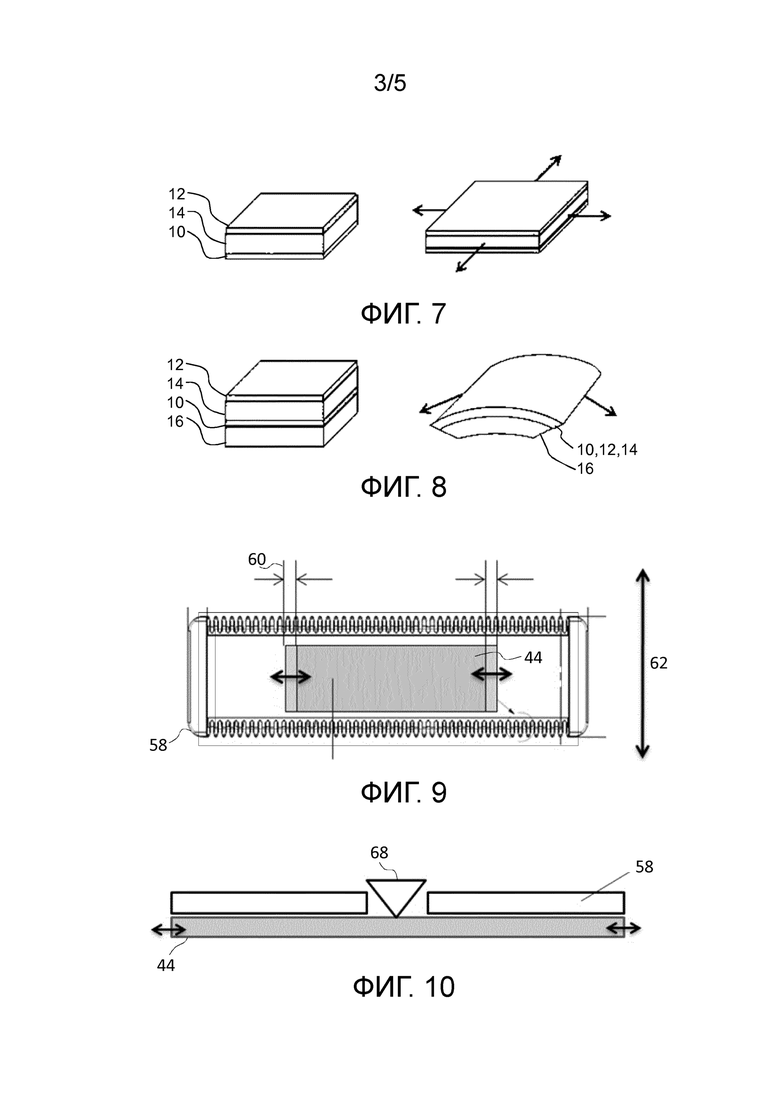
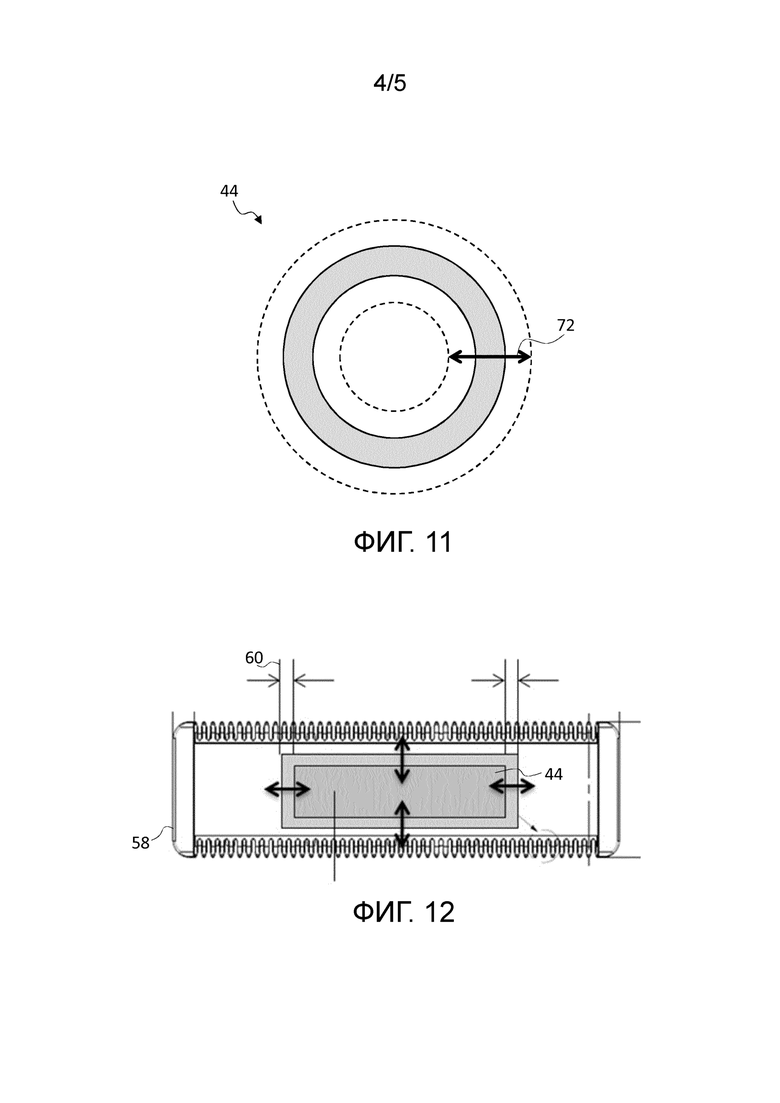
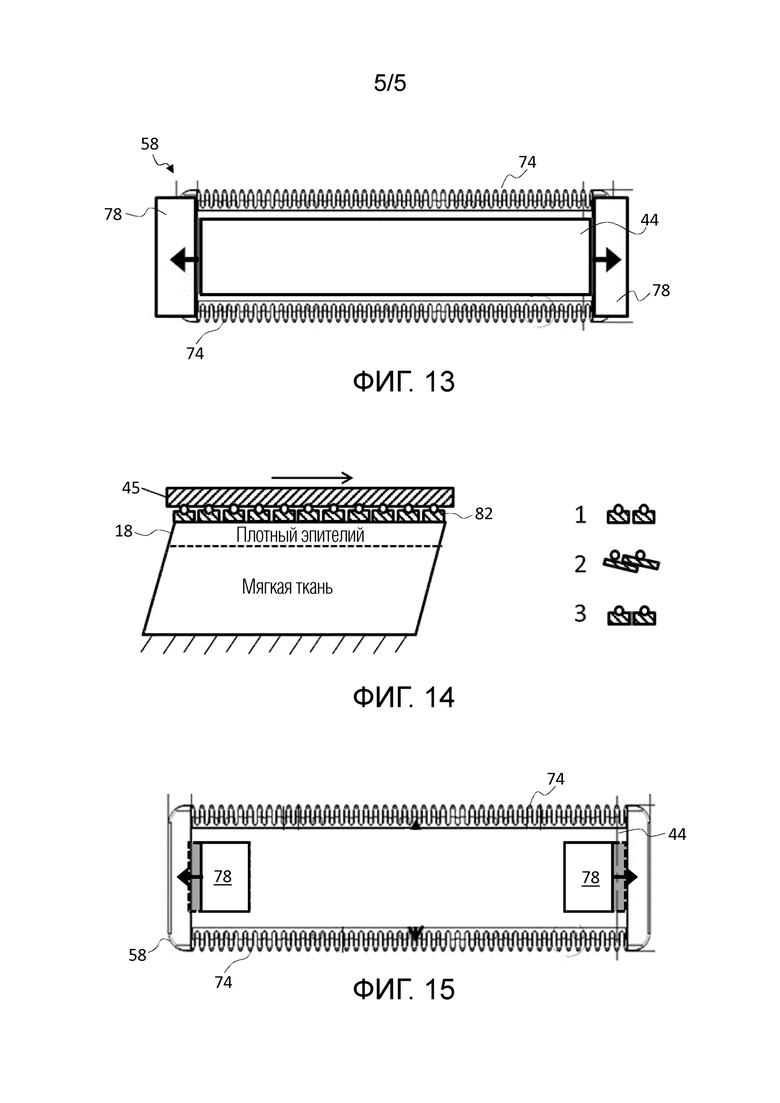
Изобретение относится к устройству управления трением для приложения к принимающей поверхности ткани человека, приспособленному для образования зоны сопряжения с упомянутой принимающей поверхностью, обладающей уменьшенным статическим трением. Устройство содержит контактную поверхностную конструкцию со множеством контактных поверхностных участков для вхождения в контакт с упомянутой принимающей поверхностью и актуаторный узел. Актуаторный узел приспособлен для управления относительным разделением упомянутых контактных поверхностных участков в зависимости от упругости принимающей поверхности и одного или более поверхностных свойств принимающей поверхности, так что величина разделения соответствует или превышает величину силы, которая может быть приложена к принимающей поверхности через контактные поверхностные участки без преодоления сил статического трения в зоне сопряжения. В результате уменьшается статическое трение между поверхностью приложения устройства и принимающей поверхностью внешнего тела. 3 н. и 12 з.п. ф-лы, 15 ил. 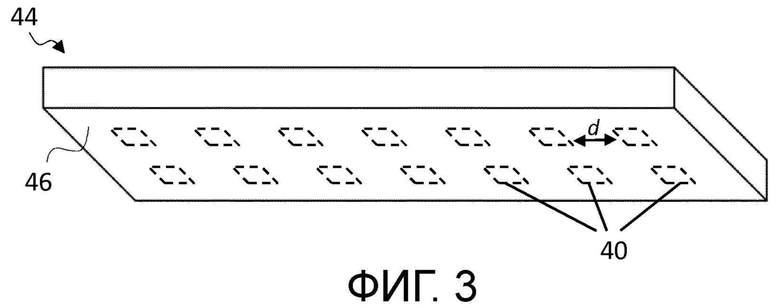
1. Устройство управления трением для приложения к принимающей поверхности (18) ткани человека, приспособленное для образования зоны сопряжения с упомянутой принимающей поверхностью, обладающей уменьшенным статическим трением, причем упомянутое устройство содержит:
контактную поверхностную конструкцию, содержащую множество контактных поверхностных участков (40) для вхождения в контакт с упомянутой принимающей поверхностью (18); и
актуаторный узел, приспособленный для управления относительным разделением упомянутых контактных поверхностных участков (40) в зависимости от упругости принимающей поверхности (18) и одного или более поверхностных свойств принимающей поверхности, так что величина разделения соответствует или превышает величину, которая может быть приложена к принимающей поверхности через контактные поверхностные участки без преодоления сил статического трения в зоне сопряжения.
2. Устройство управления трением по п.1, в котором упомянутый актуаторный узел приспособлен для управления относительным разделением контактных поверхностных участков (40) в зависимости от коэффициента статического трения между упомянутыми контактными поверхностными участками и принимающей поверхностью (18) и модуля упругости принимающей поверхности.
3. Устройство управления трением по п.1 или 2, в котором упомянутый актуаторный узел приспособлен для управления относительным разделением между контактными поверхностными участками (40) так, чтобы увеличивать от первого разделительного расстояния до второго разделительного расстояния, причем отношение второго расстояния к первому расстоянию:
находится в пределах от 1,001 до 1,01; или
находится в пределах от 1,01 до 1,1; или
больше 1,1.
4. Устройство управления трением по любому из пп.1-3, в котором упомянутое множество контактных поверхностных участков (40) представляют собой участки плоской поверхности единого гибкого слоя (44), и в котором упомянутый актуаторный узел приспособлен для создания латерального натяжения в упомянутом слое в направлении, параллельном упомянутой плоскости, тем самым активируя разделение упомянутого множества контактных поверхностных участков.
5. Устройство управления трением по п.4, в котором упомянутый актуаторный узел содержит один или более элементов чувствительного материала, приспособленных для деформирования в ответ на электрическое, термическое, магнитное или электромагнитное возбуждение.
6. Устройство управления трением по п.5, в котором:
упомянутые один или более элементов чувствительного материала механически соединены с упомянутым гибким единым слоем (44) и выполнены так, что их деформация механически перемещает гибкий единый слой так, чтобы вызывать упомянутое латеральное натяжение и соответственно активировать разделение упомянутого множества контактных поверхностных участков (40) поверхности гибкого единого слоя; или
упомянутый актуаторный узел включен в единый гибкий слой (44), причем упомянутый слой выполнен из чувствительного материала, приспособленного для деформирования в ответ на приложенное возбуждение, чтобы тем самым вызывать латеральное натяжение в упомянутом слое в одном или более направлений, параллельных упомянутой плоскости, и соответственно активировать разделение упомянутого множества контактных поверхностных участков (40) поверхности упомянутого слоя.
7. Устройство управления трением по п.4, в котором упомянутый актуаторный узел содержит один или более механических актуаторов (78), приспособленных для перемещения единого гибкого слоя (44) так, чтобы вызывать в нем латеральное натяжение в направлении, параллельном упомянутой плоскости, определяемой упомянутым слоем, и, по выбору, в котором
упомянутый актуаторный узел содержит механизм передачи энергии, приспособленный для приема в качестве входа внешнего источника кинетической энергии и передачи упомянутой кинетической энергии в упомянутые один или более механических актуаторов (78).
8. Устройство управления трением по любому из пп. 4-7, в котором упомянутый актуаторный узел приспособлен для создания латерального натяжения в едином гибком слое (44) в двух перпендикулярных направлениях, параллельных упомянутой плоскости.
9. Устройство управления трением по любому из пп. 1-3, в котором упомянутая контактная поверхностная конструкция содержит поверхности множества пространственно разделенных контактных элементов (82).
10. Устройство управления трением по п.9, в котором упомянутый актуаторный узел содержит слой чувствительного материала (45), приспособленный для деформирования в ответ на электрическое, термическое, магнитное или электромагнитное возбуждение, причем упомянутая деформация вызывает латеральное натяжение в упомянутом слое в направлении, параллельном плоскости, определяемой упомянутым слоем, и при этом упомянутое множество контактных элементов (82) соединены с поверхностью упомянутого слоя так, что упомянутая деформация слоя вызывает относительное разделение упомянутых контактных элементов.
11. Устройство управления трением по п.10, в котором упомянутый актуаторный узел содержит один или более механических актуаторов, приспособленных для физического перемещения упомянутого множества контактных элементов (82), чтобы вызывать относительное разделение между ними.
12. Устройство управления трением по любому из пп. 5, 6 или 10, в котором упомянутый чувствительный материал содержит электроактивный полимерный материал.
13. Устройство управления трением по любому из пп. 1-12, дополнительно содержащее контроллер, приспособленный для управления упомянутым актуаторным узлом так, чтобы активировать периодическое относительное разделение между упомянутыми контактными поверхностными участками, так что упомянутое относительное разделение периодически изменяется во времени.
14. Бритва или триммер, содержащий головную часть (58) для контакта с кожей пользователя, причем упомянутая головная часть содержит устройство управления трением по любому из пп. 1-13.
15. Способ управления статическим трением в зоне сопряжения между контактной поверхностной конструкцией и принимающей поверхностью (18) ткани человека, причем упомянутая контактная поверхностная конструкция содержит множество контактных поверхностных участков (40) для вхождения в контакт с упомянутой принимающей поверхностью ткани человека, причем упомянутый способ включает:
активацию относительного разделения упомянутых контактных поверхностных участков (40) в зависимости от упругости принимающей поверхности (18) и одного или более поверхностных свойств принимающей поверхности, так что величина разделения соответствует или превышает величину, которая может быть приложена к принимающей поверхности через контактные поверхностные участки без преодоления сил статического трения в зоне сопряжения.
| ДЕЛИТЕЛЬ ЛЬНОУБОРОЧНОЙ МАШИНЫ | 2009 |
|
RU2385562C9 |
| RU 2014129880 A, 10.02.2016 | |||
| КОМПОЗИЦИЯ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 1997 |
|
RU2185765C2 |
| US 2013030329 A1, 31.01.2013. | |||

