ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к использованию и к способам управления устройствами, содержащими электроактивные материалы, для регулировки трения. Изобретение также относится к устройствам, содержащим электроактивные материалы, которые пригодны для использования при регулировке трения, или для управления трением. Изобретение дополнительно относится к компьютерным программным продуктам, относящимся к использованию и способам.
УРОВЕНЬ ТЕХНИКИ
Электроактивные материалы (ЭАМ) - это материалы, которые испытывают механическую деформацию при электрическом приведении в действие. В зависимости от рассматриваемого материала, такое приведение в действие может быть в виде воздействия на ЭАМ электрического поля или электрически создаваемой силы, посредством соответствующего сигнала управления. Некоторые классы этих ЭАМ также обладают обратным эффектом, то есть они могут производить электрический сигнал, когда подвергаются действию механической деформации. Конкретный механизм, посредством которого ЭАМ предоставляет вышеупомянутые эффекты, зависит от выбранного материала. Вследствие вышеупомянутых эффектов, такие ЭАМ находят самые общие применения в исполнительных механизмах (актуаторах) и/или датчиках.
Электроактивные полимеры (ЭАП) - недавно появившийся класс материалов в группе ЭАМ. Материалы ЭАП соединяют в себе полезные свойства активации-отклика с множеством преимущественных технических свойств, тем самым, позволяя использовать их в новых областях приложений. Итак, ЭАП обычно имеют относительно большую деформацию и обеспечивают большую силу в малом объеме или при малом форм-факторе, по сравнению с обычными другими механическими актуаторами, или актуаторами на основе неорганических ЭАМ. Материалы ЭАП также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик, и возможность активации с высоким разрешением и возможность циклической активации с большим диапазоном используемых частот активации, например, 0-20 кГц. И все эти свойства сочетаются с простым производством изделий различных форм, используя хорошо устоявшиеся способы, позволяющие простую интеграцию в самых разнообразных системах.
Рабочие параметры и специфические преимущества ЭАП, которые значительно улучшились за прошедшие десять лет, позволяют использовать их в новых приложениях. Устройство ЭАП может быть особенно полезно использовано в любом приложении, в котором желательно перемещение на малую величину компонента или функционального объекта. Аналогично, данная технология может быть использована для считывания малых перемещений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Когда деформированный ЭАП актуатор находится в контакте с другой поверхностью, его перемещение может быть ограничено статическим трением (трение покоя) или динамическим трением. Трение покоя может возникать из-за локальной поверхностной шероховатости, частиц грязи или частиц продуктов износа, или из-за других явлений адгезии. Трение покоя - это риск, особенно в слоистых системах ЭАМ и актуаторах, и/или в тех, которые перемещаются вокруг углов.
Известное решение для уменьшения статического трения (трения покоя) или динамического трения, вообще говоря, заключается в применении нормальных, или поперечных, колебаний к одной из ряда контактных поверхностей, используя внешний актуатор. Однако это добавляет сложность к устройству актуатора.
Поэтому, имеется потребность в способах и устройствах, с которыми может быть реализовано снижение трения, или же реализовано управляемое трение, и которые могут быть осуществлены простым образом и с низкими затратами.
Цель изобретения заключается в удовлетворении вышеупомянутой потребности. Эта цель достигается изобретением, как определено независимыми пунктами формулы изобретения, в соответствии с которыми предоставляется способ активации и устройство актуатора, а также компьютерный программный продукт для осуществления этапов способа. Зависимые пункты формулы изобретения предоставляют преимущественные варианты реализации. Признаки, их преимущества или проблемы, которые решаются описанным способом, могут быть использованы для задания соответствующих признаков устройства, и наоборот, если это технически возможно.
В изобретении сигнал управления - это сигнал для приведения в действие ЭАМ для деформации. Сигнал управления включает в себя, по меньшей мере, в пределах части периода приведения в действие, сигнал активации и сигнал вибраций. Сигнал активации используется для контроля полного уровня деформации ЭАМ и, поэтому, элемента активации, содержащего этот ЭАМ. Это обеспечивает фактическую желаемую активацию (отдачу) устройства. Сигнал вибраций используется для инициализации вибрации того же самого элемента активации, вызываемой вибрационной деформацией ЭАП с целью уменьшить трение до активации, или даже во время активации. Таким образом, трение устройства актуатора может быть уменьшено без использования внешнего актуатора, сохраняя пространство и уменьшая сложность, а также позволяя улучшить пользовательские функции. Вибрация может быть использована для способствования фактической активации или для способствования достижению желаемой активации. Контроль трения также может быть использован для получения возможности сохранить актуатор в положениях установки, удаляя вибрационный сигнал (и, тем самым, увеличивая трение).
Активация элемента активации имеет максимальную первую частоту активации. Она может, например, иметь порядок единиц Гц или десятков Гц или сотен Гц. Активация может быть по существу статической, то есть изменение от одного положения активации до другого за любое опциональное время. Сигнал вибраций имеет частоту, большую первой частоты активации. Вибрации могут происходить на частотах сотен или тысяч Гц, или на более высоких частотах. Они используются для способствования деформации на более низкой частоте. Частота вибрации составляет, например, величину, по меньшей мере, в десять раз большую максимальной частоты активации, или даже, по меньшей мере, в 100 раз большую максимальной частоты активации.
Любой сигнал в изобретении предпочтительно представляет собой электрический сигнал, такой как сигнал напряжения или сигнал тока. Это может зависеть от конкретного электроактивного материала, используемого в устройстве. Приводимые в действие полем или приводимые в действие за счет емкости ЭАМ могут требовать сигналов напряжения, тогда как приводимые в действие за счет диффузии ионов ЭАМ могут требовать приводящего в действие тока.
Сигнал управления создается так, что в период приведения в действие имеется сигнал активации и сигнал вибраций. Сигнал активации и сигнал вибраций могут быть предоставлены на электроактивный материал во времени последовательно, не перекрываясь по времени. Сигнал активации и сигнал вибраций могут также частично или полностью перекрываться по времени. Таким образом, имеется возможность контроля трения во время фактической активации устройства.
Сигнал активации и сигнал вибраций могут быть отдельными сигналами или могут быть наложенными друг на друга сигналами, которые могут быть оба предоставлены на ту же самую часть электроактивного материала. Это может быть выполнено при одной и той же электродной компоновке. Эти конфигурации снижают сложность и сохраняют полезное пространство.
Сигнал активации и сигнал вибраций также могут быть отдельными сигналами, предоставляемыми на различные части электроактивного материала. Они могут перекрываться по времени, или нет. Может быть одна часть, специально задаваемая для регулировки трения, и другая часть - для обеспечения главной части активации, или всей желаемой активации. Элемент активации может быть приспособлен к такой конфигурации, чтобы обеспечить оптимальный отклик для обеих функций. Разные сигналы можно в этом случае предоставить с использованием разных электродных компоновок. Один из них может быть оптимизирован для приема и обработки сигнал вибраций наибольшей частоты с малыми потерями. Следовательно, трение может быть модифицировано или может регулироваться во время активации.
Сигнал активации может содержать не колебательный сигнал. Это может быть сигнал постоянного тока. Сигнал активации может быть сигналом постоянного тока. Постоянный ток - имеется в виду сигнал, который изменяется медленнее, чем вибрационный сигнал, или он не изменяется вообще. Таким образом, он может иметь более низкую частоту, чем вибрационный сигнал. Уровень сигнала постоянного тока может линейно или как-то иначе увеличиваться или уменьшаться. Однако следует отметить, что сигнал активации также может быть варьирующимся сигналом, или даже колебательным сигналом, в случае, если необходима колебательная активация.
Сигнал вибраций - это часть сигнала управления, и он заставляет колебаться элемент активации, но он не предназначен для обеспечения фактического активационного действия. Следовательно, амплитуда этого сигнала, или уровень, могут быть выбраны как меньшие, чем таковые для сигнала активации - предпочтительно, амплитуда или уровень меньше, чем 20%, меньше, чем 10% или меньше, чем 5% или меньше, чем 1% для таковых для сигнала активации.
Сигнал активации может содержать импульсный сигнал, или может состоять из импульсного сигнала, причем импульсный сигнал - это отдельный импульс, последовательность множества импульсов, или повторяющаяся импульсная последовательность. В случае последовательности множества импульсов или повторяющейся активационной импульсной последовательности, частота такой последовательности выбирается ниже, чем частота сигнала вибраций. Контроллер может быть сконфигурирован для возможности предоставления импульса, причем в течение части длительности импульса, или всей длительности импульса, уровень сигнала уменьшается или увеличивается во времени, или даже колеблется во времени с частотой, меньшей, чем частота сигнала переменного тока. Предпочтительно, этот уровень сигнала только уменьшается или увеличивается (например, линейно), или по существу остается постоянным (импульс служит сигналом постоянного тока для фиксированного промежутка времени), так, что сигнал активации в течение длительности импульса служит общим сигналом активации. В вышеупомянутых случаях сигнал активации может быть, по меньшей мере, частично наложенным на сигнал переменного тока. Таким образом, в течение, по меньшей мере, части длительности импульса сигнала активации одновременно предоставляется, по меньшей мере, один период сигнала переменного тока.
Сигнал вибраций - это преднамеренно прикладываемый сигнал, и это не просто шум или другой ложный сигнал. Сигнал вибраций может содержать частоту сигнала вибраций, которая выбирается как: <1 МГц, <100 кГц, <10 кГц, или <1 кГц. Сигнал вибраций может, например, иметь частоту ниже 1 кГц.
Частота ниже 1 кГц, например, может быть подходящей для создания неплоских колебаний элемента актуатора амплитудой 1-10 микрон. Более высокие частоты обычно могут быть использованы для неплоских колебаний меньшей амплитуды. Между частотами колебаний 1 МГц и 1 кГц может быть получено небольшое число микрон, и выше 1 МГц (ультразвук), могу быть получены субмикронные неплоские колебания.
Сигнал вибраций может иметь частоту выше, чем 250 или выше, чем 500 Гц для лучшего отделения сигнала активации от сигнала вибраций по изобретению.
Сигнал активации может быть колебательным сигналом, содержащим частоту сигнала активации, и сигнал вибраций содержит частоту сигнала вибраций, которая выше, чем частота сигнала активации.
Частота сигнала активации может быть наибольшей частотой сигнала активации. Частота сигнала активации может быть ниже, чем частота сигнала вибраций в 2, 5, 10, 20, 50, 100, 200, 500, 1000 раз, или даже более. Предпочтительно, частота сигнала активации выбирается как ниже 500 Гц, ниже 200 Гц, ниже 100 Гц или даже ниже 50 Гц.
Сигнал вибраций может содержать, по меньшей мере, одну частоту сигнала вибраций, которая равна резонансной частоте или частоте собственных колебаний элемента активации. Это обеспечивает приведение в действие малой мощностью при хороших свойствах фрикционного контроля.
Изобретение может содержать:
в первом рабочем режиме, подачу сигнала активации и сигнала вибраций на электроактивный материал; и
во втором рабочем режиме, подачу только сигнала активации, но не сигнала вибраций, на электроактивный материал.
Эти два режима задают режим малого трения и режим большого трения.
Амплитуда сигнала активации может быть выбрана так, чтобы обеспечить желаемый общий уровень деформации электроактивного полимера. Амплитуда сигнала вибраций может быть выбрана так, чтобы обеспечить желаемый общий уровень вибраций для деформации электроактивного полимера. Частота компоненты переменного тока может быть выбрана так, чтобы вызвать резонансные колебания, или нет.
Способ может быть осуществлен в компьютерном программном продукте, содержащем машинный код, сохраненный на считываемом компьютером носителе или загружаемый из сети передачи данных, машинный код, при его выполнении на компьютере, осуществляющий способ по изобретению. Он может содержать управление контроллером для выполнения этапов любого из способов. Считываемый компьютером носитель может быть носителем хранения данных, как известно в данной области техники, например, машинной памятью или любого вида диском хранения данных. Сеть передачи данных может быть любого вида проводной или беспроводной сетью, например, сетью WAN, LAN и т.д.
Изобретение может быть воплощено в устройстве, содержащем:
элемент активации, содержащий электроактивный материал, деформирующийся при воздействии сигналом управления;
контроллер, сконфигурированный для осуществления этапов способа по изобретению.
Таким образом, например, контроллер может быть приспособлен для предоставления сигнала активации с выбираемой амплитудой и/или длительностью импульса. Эта выбираемая амплитуда может быть использована для контроля общего уровня деформации и времени деформации и, тем самым, для предоставления общей аналоговой активации. Это может быть сигнал активации.
Контроллер может быть приспособлен для предоставления сигнала вибраций с выбираемой амплитудой и/или длительностью. Эта выбираемая амплитуда может быть использована для контроля амплитуды колебаний и, поэтому, для контроля уровня трения, и, тем самым, обеспечивает аналоговое управление трением. Длительность важна для управления длительностью трения.
Контроллер может быть приспособлен для предоставления сигнала вибраций с выбираемой частотой. Эта выбираемая частота может быть использована для получения резонансных колебаний, исходя из механических характеристик ЭАМ.
Также контроллер может быть приспособлен для работы в первом режиме, в котором сигнал вибраций и сигнал активации предоставляются на электроактивный материал. Он может быть наложен на сигнал активации (например, сигнал постоянного тока), и во втором режиме, в котором сигнал вибраций не накладывается. Таким образом, трением можно управлять, например, переключая устройство между состоянием большого трения и состоянием малого трения. Состояние большого трения может соответствовать статическому положению устройства актуатора, или устройства катетера, и состояние малого трения может соответствовать регулировке формы устройства, или положению катетера.
Устройство может дополнительно содержать электродную компоновку, сконфигурированную для приема сигнала активации и сигнала вибраций от контроллера, а также для их подачи, по меньшей мере, на часть электроактивного материала. Это обеспечивает простую конструкцию только с одной электродной компоновкой для обоих сигналов. Оба сигнала при этом могут быть поданы на одни и те же части электроактивного материала.
Устройство или даже элемент активации может дополнительно содержать:
первую электродную компоновку, сконфигурированную для приема сигнала активации, а также для подачи его на первую часть электроактивного материала; и
вторую электродную компоновку, сконфигурированную для приема сигнала вибраций, а также для подачи его на дополнительную часть электроактивного материала, которая отличается от первой части электроактивного материала. Эта конфигурация позволяет подавать различные сигналы на различные части (возможно, оптимизированные части) электроактивного материала.
Устройство может иметь элемент активации, содержащий первую поверхность, которая выставлена так, что для нее имеется возможность фрикционного контакта со второй поверхностью подложки. Здесь сигнал вибраций - это сигнал для модификации или снижения трения между первой поверхностью и второй поверхностью. Это полезно для управления трением в случае, если устройство перемещается вдоль внешней поверхности при использовании.
В одном наборе примеров, устройство содержит подложку, напротив которой располагается элемент активации, причем вибрация для деформации электроактивного материала должна уменьшать трение между подложкой и элементом активации. Это управление трением может тогда использоваться для контроля того, как деформируется само устройство.
Устройство может содержать подложку, и подложка тогда размещается так, что с активацией, или без активации, элемента активации, трение между первой поверхностью и второй поверхностью может быть модифицировано сигналом вибраций.
Устройство может иметь подложку, которая содержит дополнительный элемент активации, как определено в любом из предыдущих пунктов формулы изобретения, который может приводиться в действие сигналом управления или другим сигналом управления. Составленные таким образом элементы активации могут иметь преимущество благодаря уменьшению трения, когда оба элемента активизируются.
Устройство может содержать:
тело для направленного перемещения вдоль внутренней направляющей или внешнему каналу, при этом тело содержит элемент активации и необязательно внутреннюю направляющую или внешний канал, содержащий подложку; или
внутреннюю направляющую или внешний канал для направленного перемещения тела, при этом внутренняя направляющая или внешний канал содержат элемент активации и необязательно тело, содержащее подложку.
Тело может быть катетером или частью катетера. Это также может быть другое устройство для введения в тело человека или животных, типа эндоскопа и т.д. В этом случае трением можно управлять во время перемещения вдоль внутренней направляющей (которая может быть направляющим проводом), или вдоль внешнего канала. Внешний канал может быть элементом, подобным трубке.
В другом наборе примеров, включая приведенный выше пример катетера, устройство перемещается вдоль внешней поверхности при работе, причем вибрация для деформации электроактивного полимера должна уменьшать трение между электроактивным полимером и внешней поверхностью. Контроль трения тогда используется для способствования перемещению устройства вдоль другой поверхности или структуры.
Способ может быть применен к катетеру, и актуатор существует тогда для обеспечения электрически управляемого трения. Однако он может быть применен к большому количеству других возможных устройств актуатора, некоторые из которых обсуждаются дополнительно ниже.
Как упомянуто выше, подложка сама может быть частью устройства, или она может быть внешней для устройства актуатора.
Устройство может содержать катетер, или состоять из катетера, и актуатор служит для обеспечения электрически управляемого трения. Альтернативно или дополнительно, устройство может содержать разнообразные другие возможные устройства актуатора, некоторые из которых обсуждаются дополнительно ниже.
Катетер имеет слой, на который может быть подан сигнал вибраций для обеспечения снижения трения, что, например, может быть использовано для способствования перемещению катетера вдоль направляющего провода и/или перемещению катетера вдоль канала, например, кровеносного сосуда или артерии.
Центральное пространство в пределах части тела, имеющего форму трубки, или органа, например, кровеносного сосуда или кишечника.
Примеры приводимых в действие полем ЭАП - это диэлектрические эластомеры, электрострикционные полимеры (такие, как релаксорные полимеры на основе PVDF или полиуретаны), и жидкокристаллические эластомеры (ЖКЭ).
Примеры ионно приводимых в действие ЭАП - это сопряженные полимеры, полимерные композиты с углеродными нанотрубками (CNT) и Композиты Ионный Полимер-Металл (IPMC).
Приводимые в действие полем ЭАП активируются электрическим полем посредством прямой электромеханической связи, тогда как механизм активации для ионного ЭАП предполагает диффузию ионов. Оба класса материалов имеют множество элементов в своих семействах, и каждый имеет свои характерные преимущества и недостатки.
Это изобретение относится, главным образом, к приводимым в действие полем ЭАП, поскольку они имеют наименьшее время отклика. Однако приведенные концепции могут быть применены также и к ионно приводимым в действие ЭАП.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения описываются ниже подробно в отношении сопровождающих чертежей, на которых:
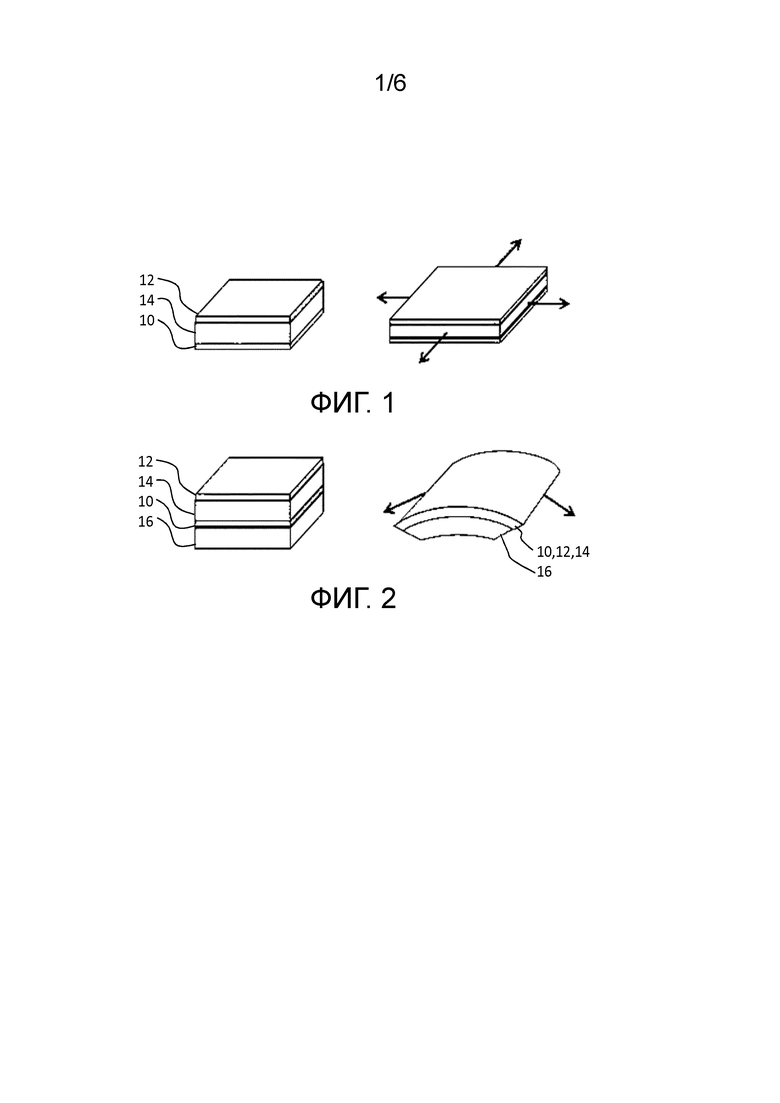
Фиг.1 изображает типичный электроактивный полимер, который не зажат;
Фиг.2 - типичный электроактивный полимер, который ограничен защитным слоем;
Фиг.3 - первый пример варианта управления для электроактивного полимера;
Фиг.4 - второй пример варианта управления для электроактивного полимера;
Фиг.5 - третий пример варианта управления для электроактивного полимера;
Фиг.6 - четвертый пример варианта управления для электроактивного полимера; и
Фиг.7 - другая возможная форма управляющего сигнала напряжения.
Фиг.8 - первый пример слоя снижения трения, наложенного на внешнюю сторону катетера;
Фиг.9 - второй пример слоя снижения трения, наложенного на внешнюю сторону катетера;
Фиг.10 - катетер, имеющий внешний слой снижения трения с первой конструкцией электрода;
Фиг.11 - катетер, имеющий внешний слой снижения трения со второй конструкцией электрода;
Фиг.12 - катетер, имеющий внешний слой снижения трения с третьей конструкцией электрода; и
Фиг.13 - показано то, как различные конструкции слоя приводят к различному смещению в зависимости от функций приводящего в действие напряжения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
Изобретение относится к управлению трением между поверхностями устройства актуатора, используя специальную активацию электроактивных материалов для того, чтобы заставить, по меньшей мере, одну из поверхностей вибрировать. Изобретение допускает такую вибрацию даже во время фактической активации электроактивного материала.
В изобретении множество терминов/признаков имеет такое значение, как это определено ниже.
Элемент активации - это часть устройства, которое содержит ЭАМ. Элемент активации может состоять из ЭАМ. В элементе может быть больше, чем один ЭАМ. При приведении в действие ЭАМ, элемент активации может обеспечить результат активации.
Электроактивный материал - это материал, который может механически деформироваться, когда он подвергается действию электрического поля или электрически создаваемой силе. Механическая деформация может включать в себя изменение формы и/или местоположения. Конкретные примеры и классы материалов приводятся ниже.
Электродная компоновка может быть сборкой одного или нескольких (предпочтительно, двух или более) электродов, устанавливаемых так, что они допускают подачу электрического сигнала управления, по меньшей мере, на часть ЭАМ в элементе активации устройства. Электроды в электродной компоновке могут быть прикреплены к ЭАМ, но это не всегда должно быть так. В случае ЭАМ из диэлектрических эластомеров, такое прикрепление предпочтительно.
Возможное воплощение изобретения будет описано в связи с множеством примеров. Однако предполагаются и другие примеры, находящиеся в пределах объема притязаний формулы изобретения.
На Фиг.1 и 2 показаны два возможных рабочих режима для известного устройства ЭАП.
Устройство содержит электроактивный полимерный слой 14, зажатый между электродами 10, 12 на противоположных сторонах электроактивного полимерного слоя 14.
На Фиг.1 показано устройство, которое не зажато. Электрическое напряжение используется, чтобы вызвать расширение электроактивного полимерного слоя во всех направлениях, как показано.
На Фиг.2 показано устройство, которое сконструировано так, чтобы расширение возникло только в одном направлении. Устройство поддерживается несущим слоем 16. Электрическое напряжение используется для изгиба или наклона слоя электроактивного полимера.
Природа, этого перемещения, например, обусловлена взаимодействием между активным слоем, который расширяется при активации, и пассивным несущим слоем. Для получения асимметричного изгиба вокруг оси, как показано, может быть, например, применена молекулярная ориентация (растяжение пленки), вызывающая перемещение в одном направлении.
Расширение в одном направлении может быть результатом асимметрии полимера ЭАП, или оно может следовать из асимметрии свойств несущего слоя, или из комбинации того и другого.
На Фиг.3 показана конструкция устройства актуатора, в котором слой 30 электроактивного полимера (ЭАП) установлен на подложке 32, и в котором перемещение слоя 30 происходит в плоскости, то есть, в плоскости, задаваемой поверхностью контакта между элементами 30 и 32. Это может быть достигнуто установкой слоя 30 на подложке с одной стороны (например, слева на Фиг.3), и в другом случае слой ЭАП 30 устанавливается свободным, как на Фиг.1. Когда слой 30 деформируется (как показано стрелкой на Фиг.3), то возникает трение между слоем 30 и статической подложкой 32.
Контроллер 34 используется для подачи сигнала активации в форме сигнала напряжения постоянного тока (DC) на ЭАП слой 30, и профиль напряжение-время, показанный как 36, соответствует ступенчатому изменению прикладываемого напряжения за некоторый промежуток времени. Сигнал управления предоставляется на слой ЭАП посредством электродной компоновки, которая включает в себя два электрода, по одному с каждой стороны слоя ЭАП, и Контроллер присоединяется для подачи его сигнала управления на один или на оба электрода. Электроды находятся в плоскости обозначенного перемещения и для простоты не показаны.
Трение (фрикционное сопротивление) между слоями препятствует относительному скользящему перемещению, пока сила трения не будет преодолена. Таким образом, система может иметь внутреннюю задержку механического выхода при активации. Эта задержка может быть постоянной (неопределенное время задержки), если активация недостаточна для появления силы активации, достаточной для преодоления силы трения, но также может быть не постоянной (заданное время задержки), если для силы активации требуется время для роста после подачи сигнала активации. Последняя ситуация показана на Фиг.3. Таким образом, если используется показанный профиль напряжение-время, смещение (Disp') задерживается, и это показано графиком 38 смещения ("Disp'"), который имеет задержку перед началом перемещения, так же как и относительно медленным повышением, поскольку должно быть преодолено трение. Таким образом, трение (при данном трении покоя) функционирует как механизм задержки устройства. Трение покоя может возникать вследствие локальной поверхностной шероховатости, грязи или частиц-продуктов износа, или вследствие других явлений адгезии. Трение покоя - это проблема, особенно в слоистых системах и актуаторах, которые скользят относительно других поверхностей, например, двигающихся вокруг углов.
Известное решение для уменьшения статического трения (трения покоя) или динамического трения, вообще говоря, заключается в применении собственных или поперечных колебаний к одной из контактных поверхностей, используя внешний актуатор. Это, например, раскрыто в работе Teidelt E. и др., 2012, "Влияние Ультразвукового Колебания на Статическое и Скользящее Трение", Trib. Lett., Vol. 48, 51-62. Однако это требует дополнительных компонентов, таких как внешний актуатор, для уменьшения трения, и это ограничивает применения устройства на основе ЭАП относительно желаемого его использования в ограниченных пространствах, для которых они обычно оказываются полезными вследствие их малого достижимого форм-фактора.
Изобретение основано на применении относительно высокочастотного сигнала вибраций к ЭАП, порождая вибрацию ЭАП, содержащего элемент или поверхность.
Таким образом, как модификация примера на Фиг.3, контроллер 34 теперь сконфигурирован, чтобы также создавать и подавать сигнал переменного тока (AC) (вибрационный сигнал) на ЭАП в течение некоторого периода вибраций. Период вибраций, в этом случае, составляет, по меньшей мере, часть периода активации, и в этом случае сигнал вибраций может считаться синусоидальным сигналом малой амплитуды, предоставляемым в пределах периода вибраций, который является частью периода активации, при котором сигнал активации сохраняется на постоянном уровне. В этом случае, этот сигнал вибраций предоставляется на электроды, которые также используются для сигнала активации, и, следовательно, оба сигнала предоставляются на ЭАП как результат наложения друг на друга и также в том же самом местоположении ЭАП, как показано на Фиг.4. Следует отметить, что реальные электроды для простоты не показаны.
В примере, часть сигнала переменного тока приводит к поверхностным колебаниям, которые накладываются на номинальное смещение актуатора. Поверхностные колебания уменьшают контактную площадь ("плавающий контакт") и сглаживают захваченные частицы или механически сцепленные поверхностные дефекты (например, локальные максимумы поверхностной шероховатости или царапины). Колебания могут проявляться как колебания в плоскости (стрелка 40) и/или как поперечные колебания (стрелка 42).
Сигнал управления (колебательный сигнал приведения в действие), показанный на Фиг.4, содержит суперпозицию компоненты постоянного тока (сигнал активации) для управления общим уровнем деформации (то есть, так называемое желаемая полезная активация устройства) электроактивного полимера, и компоненты переменного тока (вибрационный сигнал) для получения вибрационной деформации (то есть, дополнительной активации с эффектом влияния на время задержки для достижения полезной активации), которая добавляется к общему уровню деформации электроактивного полимера. Компонента переменного тока показана как применяемая, как только уровень постоянного тока достигает своего нового уровня, но она также может быть применена в течение части нарастания сигнала постоянного тока, или к обеим частям и даже после удаления активационного сигнала постоянного тока, таким образом, облегчая возврат ЭАП к его не активационному состоянию.
В примере на Фиг.4, контроллер 34 имеет возможность подачи напряжения переменного тока и напряжения постоянного тока. Этот случай не нуждается в дополнительных конструктивных модификациях устройства.
Вибрационный сигнал и сигнал активации не должны подаваться на ту же самую часть собственно ЭАП. Таким образом, разделение местоположений на ЭАП для подачи на него сигнала активации и сигнала вибраций допускается, пока сигнал вибраций, подаваемый на ЭАП, вызывает достаточную вибрацию содержащего ЭАП элемента, так, чтобы время задержки относительно активации уменьшалось по сравнению с ситуацией с подобной активацией без сигнала вибраций. Это разделение местоположений может включать в себя необходимость дополнительной электродной компоновки в примере на Фиг.3, 4 и 5. Такое разделение может быть преимущественным в ситуациях, когда конструкция устройства приводит к оптимальной активации устройства, возникающей с использованием первого местоположения подачи сигнала на ЭАП, и оптимальная вибрация требует второго местоположения, которое отличается от первого местоположения для подачи сигнала вибраций на ЭАП.
Актуатор ЭАП может быть устройством с единственным слоем или может быть многослойным устройством (не показано). Актуатор ЭАП в этом случае показан как скользящий актуатор, но также может быть изгибающимся актуатором, который может при изгибе также испытывать индуцированное скольжением трение.
Для примера на Фиг.4 предполагается, что слой ЭАП деформируется относительно медленно по сравнению с частотой сигнала переменного тока (вибрационный сигнал). Следовательно, на Фиг.4, как только напряжение приведения в действие сигнала активации увеличивается, ЭАП деформируется в течение всего периода времени, показанного на графике (как можно видеть из Фиг.3), и имеются активные колебания во время деформации, вызванной компонентой переменного тока. Вообще, чем выше амплитуда сигнала переменного тока, тем ниже будет трение, поскольку колебания при этом велики. Таким образом, кривая смещения может быть сделана более крутой, и актуатор может достигнуть своей конечной конфигурации быстрее. В свою очередь, это допускает выполнение более высокочастотной активации устройства.
На Фиг.5 показан актуатор с высокочастотным сигналом переменного тока, добавленным к сигналу активации постоянного тока для допущения проскальзывания, когда актуатор двигается от одного положения до следующего положения. Следующее положение поддерживается удалением прикладываемого напряжения вследствие возвращения трения и, поэтому, функции прилипания. Это придает актуатору функциональные возможности двух устойчивых состояний, для которых два различных положения могут устанавливаться без применения сигнала приведения в действие.
В этом примере предполагается, что ЭАП деформируется несколько быстрее (относительно частоты сигнала переменного тока), чем в вышеприведенном примере.
Как показано на профиле зависимости напряжения от времени на Фиг.5, приведение в действие устройства начинается с напряжения переменного тока с только малым смещением постоянным током, между временными точками 50 и 52 (то есть, сигнал эффективно колеблется между нулевым напряжением и амплитудным значением напряжения), так, чтобы вибрация возникала вблизи почти не активированного состояния, то есть устройство будет вибрировать между не активированным состоянием и активированным состоянием с малой амплитудой. Это приведет к сокращению трения и подготовит слой электроактивного полимера к сглаженному активационному перемещению, которое возникает, как только напряжение приведения в действие начнет увеличиваться. Следовательно, задержка может быть сокращена до минимума.
Слой ЭАП затем продолжает деформироваться в течение следующего периода времени, показанного на графике, между временными точками 52 и 53, когда имеются активные колебания во время деформации, вызванной компонентой переменного тока, наложенной на повышающийся уровень напряжения постоянного тока.
Наконец, после короткого периода, когда сигнал переменного тока наложен по существу на постоянный уровень постоянного тока, для допущения какой-либо задержки перемещения слоя электроактивного полимера при достижении его конечного состояния (возникнет внутренняя задержка между механической деформацией и временем подачи управляющих сигналов вследствие внутренних свойств материала ЭАП а также конкретной конструкции устройства), электрическое напряжение удаляется в момент времени 53, что, если остаточное трение достаточно, приведет ко второму стационарному состоянию, сохраняемому в течение интервала времени 54. Впоследствии устройство может быть восстановлено подачей только малого сигнала переменного тока в период времени 50-52, или другого малого сигнала переменного тока сигнала для преодоления трения и возврата устройства к его первоначальному состоянию.
Следовательно, изобретение позволяет реализовать конструкцию и соответствующую работу устройства, которое имеет два (или более) устойчивых состояний с возможностью восстановления. В таких случаях, как показанный на Фиг.5 пример, может оказаться преимущественным медленно уменьшать амплитуду сигнала переменного тока во время его подачи на ЭАП (снижение сигнала переменного тока) для перевода устройства в наиболее устойчивое (наибольшее трение) состояние.
В целом, это снова случай, когда чем выше амплитуда сигнала переменного тока, тем ниже будет трение, если колебания оказываются большими.
Эти функциональные возможности с двумя устойчивыми состояниями могут, например, быть использованы для сохранения мощности, при этом сигнал приведения в действие может быть удален, как только устройство поддерживается в устойчивом состоянии, и положительное приведение в действие необходимо только во время перемещения актуатора.
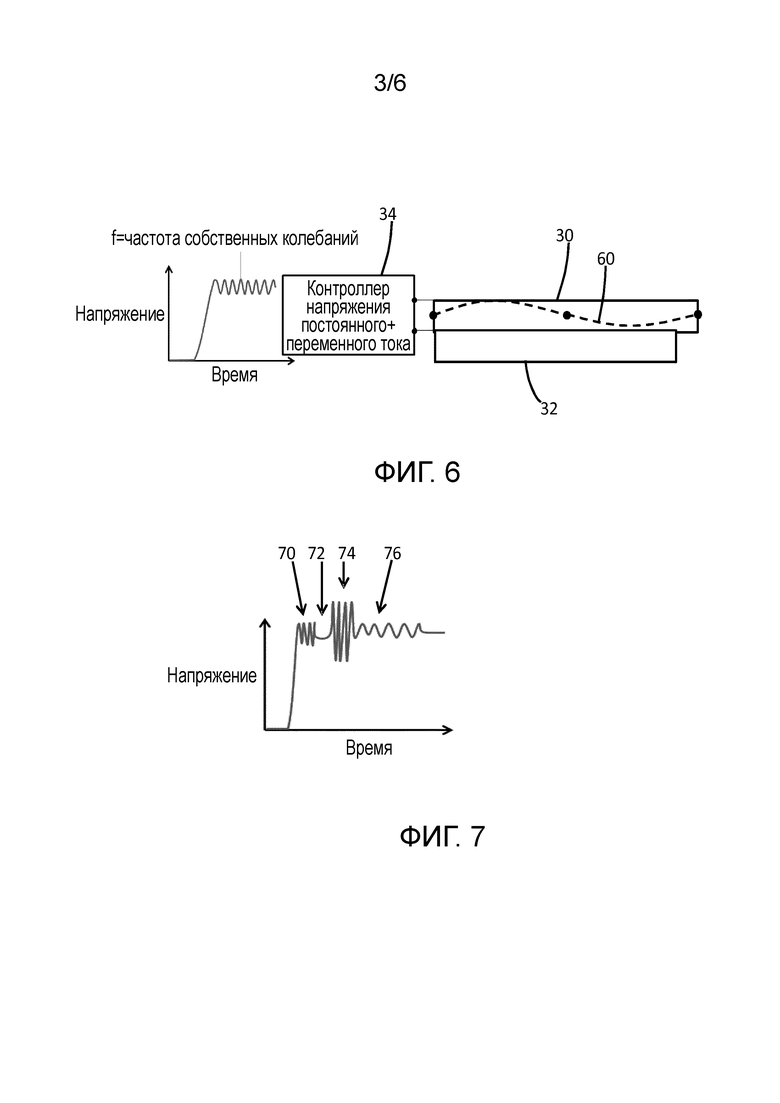
На Фиг.6 показан другой вариант, который может рассматриваться как реализация изобретения при малой мощности.
И опять, высокочастотный сигнал переменного тока, как вибрационный сигнал, добавляется к сигналу приведения в действие постоянного тока, как сигнал активации, как показано на Фиг.4. Однако, в этом примере, частота сигнала переменного тока выбирается как одна из частот собственных колебаний актуатора ЭАП, или элемента, содержащего ЭАП. Это приводит к резонансным колебаниям со стоячими волнами, как, например, отображено стоячей волной 60. Преимущество состоит в том, что актуатор, как только он приводится в действие в резонансе, может достигнуть более высоких напряжений при тех же самых приложенных напряжениях переменного тока, так, что он имеет возможность преодоления трения при меньших амплитудах сигнала вибраций.
Недостаток заключается в том, что частота собственных колебаний специфична для каждой конструкции актуатора, и значение частоты собственных колебаний зависит от граничных условий, действующих на ЭАП. Кроме того, актуатор должен быть приведен в условия резонанса, будучи ограниченным трением, что требует высокой начальной входной энергии. Частоты собственных колебаний могут быть определены для устройства с использованием соответствующих процедур калибровки (специалист в данной области техники должен знать, как измерять такие частоты) и сохранены в справочных таблицах для использования контроллером, если это необходимо.
Для актуатора на Фиг.6, некоторая степень настройки регулировки трения может быть достигнута адаптацией частоты к различным состояниям резонанса (то есть, фундаментальные резонансные частоты и частоты высших гармоник для продольных и поперечных колебаний и колебаний по толщине).
Актуатор может быть изначально приведен в действие с использованием большой амплитуды переменного тока для уменьшения трения, и как только при резонансе станет возможным применить меньшую амплитуду напряжения, можно понизить потребляемую мощность и увеличить время эксплуатации актуатора. Значение импеданса актуатора может быть использовано для настройки амплитуды переменного тока, в петле обратной связи. Специалисты в данной области техники должны знать, как осуществить такие петли обратной связи в соответствии с принципами электронной техники.
Это воплощение изобретения обеспечивает контролируемое электронным образом поверхностное трение.
Из различных вышеприведенных примеров видно, что контроллер может иметь возможность выборочно применять компоненту переменного тока, и может иметь возможность регулировать амплитуду и/или частоту компоненты переменного тока во времени непрерывно или поэтапно, а также иметь возможность регулировать компоненту постоянного тока до различных уровней.
На Фиг.7 показана примерная схема приведения в действие, которая объединяет эти возможности. Сигнал управления с пульсациями переменного тока различных частот и амплитуд используется для электронного управления коэффициентом трения поверхности актуатора ЭАП. Период времени 70 обеспечивает состояние малого трения с относительно малой амплитудой высокочастотной компоненты переменного тока. Период времени 72 обеспечивает состояние прилипания без компоненты переменного тока. Период времени 74 обеспечивает состояние почти нулевого трения с относительно большой амплитудой высокочастотной компоненты переменного тока. Период времени 74 обеспечивает состояние среднего трения с относительно малой амплитудой и также низкой частотой компоненты переменного тока.
В вышеприведенных примерах, устройство имеет подложку 32, напротив которой располагается ЭАП 30, так, чтобы имелось внутреннее трение в пределах управляемого устройства. Это особенно важно для актуатора, который деформируется в плоскости, как показано, или, например, для многослойного изгибного актуатора, когда может быть трение между различными слоями при деформации.
Однако, также возможно, чтобы устройство перемещалось вдоль внешней поверхности при использовании, причем вибрация для деформации электроактивного полимера служит для уменьшения трения между электроактивным полимером (элементом) и внешней поверхностью (которая не является частью самого устройства). Актуатор может быть изгибным, скручивающим актуатором, или деформирующимся в плоскости актуатором.
Имеются различные примеры устройства, которое перемещается при использовании и может испытывать трение в зависимости от внешнего компонента. Один из рассматриваемых теперь примеров - это катетер или любой другой тип устройства с направляющим проводом. Трение между катетером и стенкой сосуда, через который он проходит, может привести к напряжениям и деформациям, которые могут привести к повреждению сосуда. В некоторых сосудистых катетерах, трение скольжения также присутствует между направляющим проводом или проводом манипуляции и стенкой внутреннего канала катетера, который натягивается на направляющий провод. Высокое и/или непостоянное фрикционное сопротивление между направляющим проводом и каналом катетера приводит к уменьшенной тактильной обратной связи, запаздыванию и большим усилиям вставки в точке ввода, что может привести к короблению катетера или привести к проблемам при втягивании катетера.
Хорошо известно, что поверхностное структурирование может, при некоторых обстоятельствах, приводить к снижению трения смазанных контактов. Также известно, что колебание вне плоскости может быть использовано для уменьшения трения (как упомянуто выше). Динамическая поверхностная деформация, как известно, уменьшает трение, уменьшая часть "прилипания" при скольжении прилипание-проскальзывание, например, как показано в статье "Влияние Ультразвукового Колебания на Статическое Трение и Трение Скольжения" E. Teidelt и др., упомянутой выше. Коэффициент трения может быть сделан уменьшенным на порядки по величине, когда применяются колебания поверхности. Это особенно справедливо при малой скорости скольжения (0-10 мм/с), что применимо к перемещению инвазивных устройств, таких как катетеры.
Более общий подход к снижению трения между внешней поверхностью катетера и стенкой сосуда заключается в покрытии катетера покрытием с малым трением, то есть скользкой гидрофильной поверхностью, которая уменьшает трение, или микроструктурированной поверхностью, предназначенной для снижения трения. Однако, как только катетер находится в желаемом положении, он должен оставаться там для точного выполнения необходимого лечения; очень малое сопротивление трения приводит к трудности поддержания правильного положения в сосуде.
Также важно то, что врачи желают иметь определенную степень тактильной обратной связи при вставке катетера. Эта степень может отличаться для каждого врача и также варьироваться для различных частей процедуры. Если врачи могли бы управлять свойствами трения катетера, то они могли бы управлять степенью тактильной обратной связи для его приспособления к их потребностям.
Управление вибрацией, как объяснено выше (которое само по себе не требует компоненты постоянного тока), может быть применено к внутренней поверхности (контакт с направляющим проводом) или внешней поверхности (контакт со стенкой сосуда) катетера, так, чтобы форма могла быть деформирована вне плоскости для создания малых колебаний вдоль поверхности. Трение тогда может быть уменьшено, например, относительно сосуда, в который катетер вставлен, когда необходимо, и оно может быть восстановлено до большего трения, когда это необходимо, например, когда устройство находится в его желаемом местоположении и должно быть поддержано на месте
Для осуществления этого подхода в управлении трением между катетером и внешним сосудом, в который вставлен катетер, ЭАП используется для формирования материальной пленки на внешней поверхности катетера, и эта пленка может быть сделана вибрирующей, используя ЭАП. Пленка может быть поверхностью ЭАП, но не должна быть собственно этой поверхностью, если при этом ЭАП может вызывать вибрацию этой поверхности.
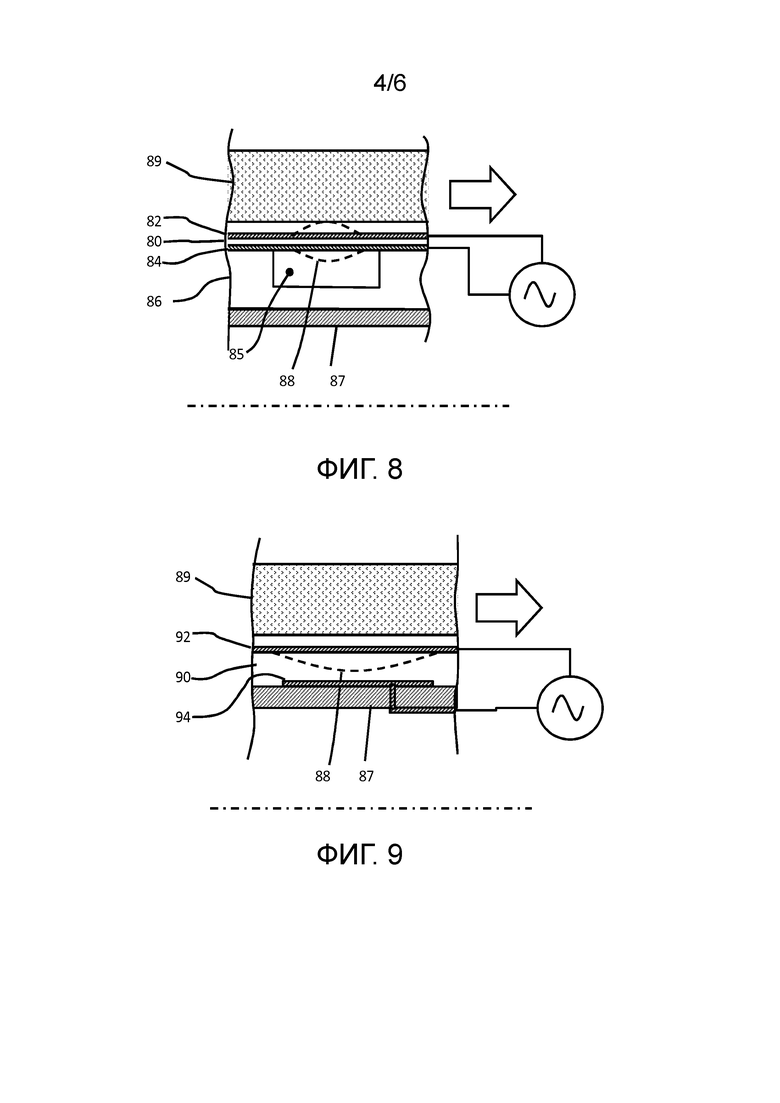
На Фиг.8 и 9 показан малый участок длины катетера и только на одной стороне средней линии катетера.
В одной компоновке, показанной на Фиг.8, слой 80 ЭАП (и его электродные слои 82, 84) только частично сцепляются с внешней поверхностью катетера, поскольку канавки 85 сформированы во внешнем слое 86 поверх внешней стороны канала 87 катетера. Таким образом, часть слоя ЭАП оказывается свободной для перемещения и создания поверхностных колебаний 88 вне плоскости, обеспечивая динамическое поверхностное текстурирование. Это позволяет управлять и/или уменьшать трение вдоль всей длины вала катетера или его части, где это желательно.
Неглубокая полость 85 ниже свободной части слоя ЭАП предназначена для его свободных колебаний. Слой ЭАП деформируется, когда прикладывается электрическое напряжение, и вызывает статическую деформацию вне плоскости, когда прикладывается электрическое напряжение постоянного тока, или колебательное движение, когда прикладывается электрическое напряжение переменного тока.
Таким образом, управление постоянного тока или переменного тока опять же возможно, так же как переменный ток, наложенный на постоянный ток, как в вышеприведенных примерах. Управление постоянным током уменьшает трение до некоторой степени посредством предоставления микро-структурированной поверхности, и управление переменным током дополнительно вызывает колебания, которые дополнительно уменьшают трение.
Деформация может происходить посредством изгиба двойного слоя или перемещением в форме прогиба.
Как и в вышеприведенных примерах, частота и амплитуда сигнала переменного тока, так же как и уровень сигнала постоянного тока, и дополнительно механическая конструкция, могут дать высокую степень возможности регулировки коэффициента трения при многих различных обстоятельствах.
Слой ЭАП также может быть приспособлен к желаемому модулю Юнга (например, приспособлен к свойствам материала катетера), минимизируя влияние исполнительного материала на суммарную гибкость катетера. Могут быть использованы тонкие слои ЭАП.
Для изготовления примера на Фиг.8, применяется полимерное покрытие 86, которое действует как поддерживающая конструкция, обычно меньше, чем 100 микрон толщиной. Полости 85 тогда вытачиваются на станке или выдавливаются, и клейкий материал накладывается на выступающие части поверхности (то есть, вокруг полостей). Тонкий слой электроактивного материала 80 с наложенными тонкопленочными электродами 82, 84 прикрепляется к поддерживающей конструкции, используя клейкий материал, например, оборачивая вокруг катетера и отверждая клейкий материал. Альтернативно, электроактивный материал может быть ламинирован на подложку переменной толщины для увеличения изгибной активации (используя изгиб двойного слоя).
Электроды могут быть наложены с обеих сторон пленки или, иначе, на внутренней стороне пленки во встречно-штыревой конфигурации. В случае необходимости, пассивное конформное покрытие может быть наложено на поверхность для дополнительной регулировки фрикционных свойств.
Электродные компоновки также могут быть сконфигурированы в определенных компоновках для создания 2D матрицы впадин на внешней поверхности катетера.
Электроды соединяются, и когда подается сигнал постоянного тока, ЭАП расширяется или сжимается, вызывая деформацию поверхности, тем самым, изменяя реальную контактную площадь между катетером и сосудом и влияя на смазочные свойства. Когда прикладывается электрическое напряжение переменного тока, временная шкала активации может быть изменена, вызывая непрерывное изменение топологии поверхности. Частота и напряжение/амплитуда могут быть отрегулированы для контроля трения между поверхностями.
На Фиг.9 показана альтернатива, в которой толстый, более мягкий слой 90 ЭАП может быть деформирован вне плоскости посредством электрострикции для обеспечения переключаемой топологии поверхности. Такие мягкие электрострикционные полимеры, например, включают в себя силиконовые и полиуретановые эластомеры и акрилаты. Слой опять же формируется между электродами 92, 94, и три слоя предоставляются поверх внешней стенки 87 катетера.
Использование актуатора регулировки трения на внешней поверхности катетера было описано выше. Подобный подход может быть использован для внутренней поверхности катетера, которая находится в контакте с направляющим проводом. Поверхность направляющего провода (типично Nitinol и покрытый тонким слоем PTFE) намного более тверже, так, что поверхность электроактивного полимера может быть покрыта более твердым материалом для увеличения эффекта снижения трения.
На Фиг.10-12 показаны различные конструкции катетера.
На Фиг.10 показано варианты, основанные на Фиг.8. Катетер имеет внешний канал, то есть, тело 87 катетера, поверх которого предоставляется внешний полимерный слой 86 с его полостями 85.
В этом примере, ЭАП управляется плоскими электродами на противоположных сторонах слоя ЭАП, как показано на Фиг.8.
На Фиг.10 показаны две возможные схемы приведения в действие на разных частотах. Первая резонансная частота приводит к деформации, показанной на графике 100, с половиной длины волны, задаваемой в каждой полости. График 102 соответствует более высоким резонансным частотам.
На Фиг.11 показана конструкция со встречно-штыревыми электродами, предоставленными на единственной стороне (сторона, противостоящая стенке катетера) слоя ЭАП. Она содержит два гребенчатых электрода с чередующимися пальцами гребенки.
На Фиг.12 показана конструкция с одним непрерывным электродом и одним структурированным электродом, так, чтобы деформация могла быть ограничена определенными зонами всего слоя ЭАП.
Каждый из этих подходов может быть использован для введения волны продольной деформации, и ей можно управлять как статической (подачей напряжения постоянного тока), или как динамической (напряжением переменного тока или напряжением переменного тока, наложенным на основной уровень постоянного тока).
Типичные статические деформации, которые могут быть достигнуты, используя конструкцию, показанную на Фиг.10, показаны на Фиг.13 для двойных слоев PVDF-TrFE-CFE толщиной 5 мкм на пластиковой (то есть, Полиимид, PET, PC) подложке с тремя различными толщинами. График показывает функцию смещение-напряжение. График 130 приведен для подложки толщиной 2,5 мкм, график 132 - для подложки толщиной 5,0 мкм, и график 134 - для подложки толщиной 10,0 мкм. Ширина полости составляет 0,5 мм.
Кроме амплитуды напряжения, отклонение также будет зависеть от частоты прикладываемого напряжения и от близости к стенке сосуда. Деформации 5 мкм уже дают огромный эффект для трения, в зависимости от условий, таких как жесткость, поверхностная гидрофильность, сухость/смазывание, нагрузка и скорость скольжения. Поэтому, имея возможность управлять поверхностной топологией, можно иметь очень большое влияние на фрикционные свойства катетера, позволяя снизить повреждение кровеносного сосуда, управляемую тактильную обратную связь и лучшее позиционирование и поддержание.
Эта конструкция (в целом по изобретению) может быть применена к различным типам катетера, таким как сосудистые катетеры или мочевые катетеры, для использования на теле человека и/или животных.
Во всех вышеприведенных примерах, электродная компоновка может содержать электроды на противоположных гранях слоя электроактивного полимера, как показано выше для приводимого в действие полем устройства. Они предоставляют поперечное электрическое поле для управления толщиной слоя ЭАП. Это, в свою очередь, вызывает расширение или сжатие слоя ЭАП в плоскости слоя.
Электродная компоновка может вместо этого содержать пару гребенчатых электродов на одной грани слоя электроактивного полимера. Они предоставляют электрическое поле в плоскости для непосредственного управления размерами слоя в плоскости.
Для вышеприведенных примеров, в которых используется компонента переменного тока, наложенная на уровень приведения в действие постоянного тока, напряжение постоянного тока 200 Вольт может дать номинальное смещение 200 микрон (например, нагруженного актуатора). Для снижения трения, может быть желательна вибрация 2 микрона для получения эффективного снижения трения, но без чрезмерного нарушения приложения. Это, например, означает пульсацию переменного тока 2 Вольта (линейной интерполяцией), так, что величина компоненты переменного тока составляет 0,01 от величины компоненты постоянного тока. Значение напряжения переменного тока может быть взято как среднее для пиковой амплитуды (то есть, половина величины удвоенной амплитуды). Фактические уровни напряжения, необходимые в сигналах управления, зависят от множества параметров, таких как используемый материал ЭАП (органический или полимерный ЭАМ обычно требует большей амплитуды сигналов, чем неорганический ЭАМ); толщина ЭАМ, поверх которой прикладывается электрическое поле, и т.д. Специалисты в данной области техники должны знать, как регулировать уровни для применяемого устройства, используя теорию материалов ЭАМ и представления об электрическом конденсаторе, поскольку большинство ЭАМ представляют собой электрически изоляционные диэлектрические материалы, к которым прикладываются напряжения, прикладываемые к электродам.
Уровни шума в сигналах постоянного тока для ЭАП типично составляют меньше, чем 1%.
Обычно, величина компоненты переменного тока составляет меньше, чем 10% от величины компоненты постоянного тока, и может быть меньше, чем 5, или даже меньше, чем 1% компоненты постоянного тока. Однако компонента переменного тока должна иметь величину, большую, чем уровень шума, например, больше, чем в 10 раз уровня шума.
Пульсация напряжения переменного тока, например, может быть между 1 и 5 Вольт для активации постоянного тока 150-250 Вольт. Вообще говоря, активация переменного тока на единицу амплитуды приведения в действие напряжения переменного тока, увеличивается с напряжением постоянного тока, так, чтобы относительно большая компонента переменного тока требовалась для активации меньшим постоянным током.
Например, подходящие комбинации сигналов могут быть:
Напряжение постоянного тока Амплитуда напряжения переменного тока
В изобретении, так как в вышеупомянутых примерах, сигнал активации - это сигнал постоянного тока. Альтернативно сигнал активации может быть сигналом с варьирующимся уровнем, пока вариации медленнее, чем таковые для сигнала вибраций. Сигнал активации может быть увеличивающимся во времени или нет, или спадающим сигналом, линейно или нелинейно.
Изобретение будет иметь свой эффект для разнообразных электроактивных материалов. Таким образом, хотя примеры были описаны в отношении ЭАП, такие материалы фактически могут быть заменены другими электроактивными материалами. Следовательно, если не указано иначе, вышеприведенные материалы ЭАП могут быть заменены другими материалами ЭАМ. Такие другие материалы ЭАМ известны в данной области техники, и специалист в данной области техники должен знать, где их найти и как их применить. Множество опций будет описано здесь ниже.
Среди множества устройств ЭАМ, общее разделение - это приводимые в действие полем и ионно приводимые в действие ЭАМ. Приводимые в действие полем ЭАМ активируются электрическим полем посредством прямой электромеханической связи, тогда как механизм активации для ионного ЭАП предполагает диффузию ионов. Оба класса устройств имеют множество элементов в своем семействе, и каждое имеет свои собственные преимущества и недостатки.
Существует много приводимых в действие полем ЭАМ, органической или неорганической природы. Например, материал ЭАМ может быть релаксорным сегнетоэлектрическим неорганическим материалом. Такие материалы могут иметь электрострикционную константу, достаточно высокую для практического использования. Обычно используемые примеры: ниобат магния свинца (PMN), ниобат магния свинца - титанат свинца (PMN-PT) и цирконат-титанат лантана-свинца (PLZT).
Специальный вид материалов ЭАМ - это органические электроактивные материалы OЭАМ, к которым также принадлежат Электроактивные полимеры (ЭАП). Органические материалы и особенно полимеры - это перспективный класс материалов, поскольку они объединяют свойства активации с полезными свойствами материала, такими как малый вес, дешевое изготовление и простая обработка. Свойства активации часто оказываются большими, чем таковые для их неорганических аналогов. Кроме того, множество материалов ЭАП химически приемлемы для использования с телом человека или животных, что не всегда бывает с неорганическими аналогами (например, содержащие Pb перовскиты).
Примеры приводимых в действие полем ЭАП - это диэлектрические эластомеры, пьезоэлектрические полимеры, релаксорные сегнетоэлектрические полимеры, сегнетоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе PVDF или полиуретаны), и жидкокристаллические эластомеры (LCE). Диэлектрические эластомеры, строго говоря, не являются приводимыми в действие полем материалами. Их отклик основан на силе, прикладываемой к ним, причем сила производится электродами, нанесенными на них. Однако. для данного изобретения они могут быть включены в семейство ЭАП. Примеры ионно приводимых в действие ЭАП - это сопряженные полимеры, полимерные композиты с углеродными нанотрубками (CNT) и Композиты Ионный Полимер-Металл (IPMC).
Электроактивные полимеры включают в себя, но без ограничения, подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные сегнетоэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, Композиты Ионный Полимер-Металл, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает в себя, но без ограничения:
Поливинилиденфторид (PVDF), Поливинилиденфторид-трифторэтилен (PVDF-TrFE), Поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), Поливинилиденфторид-трифторэтилен-хлортрифторэтилен (PVDF-TrFE-CTFE), Поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но без ограничения:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает в себя, но без ограничения:
полипиррол, поли-3,4-этилендиокситиофен, поли(p-фенилен сульфид), полианилины.
Дополнительные пассивные слои могут быть предоставлены для влияния на поведение слоя ЭАП в ответ на прикладываемое электрическое поле.
Электроды могут быть выполнены из любого электрически проводящего материала. Такие материалы включают в себя, но без ограничения, металлы, электрически проводящие органические материалы, такие как органические полимеры, композитные материалы, содержащие проводящие частицы в матрице, например, полимерного материала. Металлы включают в себя Благородные металлы, например, Pt, Au и Ag, но также могут быть менее благородными металлами, такими как Медь или Алюминий. Электроды могут быть составлены из множественных слоев, каждый содержащий любой из вышеупомянутых электродных материалов. Это может быть полезным для улучшения механической податливости и/или адгезии с ЭАП, к которым прикрепляется электроды. Электроды могут быть нанесены с использованием обычных методик нанесения, таких как методики нанесения покрытия (например, методика нанесение покрытия методом центрифугирования, нанесение покрытия ножевым устройством, нанесение покрытия распылением и т.д. для органических или композитных материалов электродов) или методики напыления или методики разбрызгивания (например, для металлических электродов). Электроды могут иметь различные толщины, включая в себя, но без ограничения, толщины миллиметрового диапазона, микронного диапазона, нанометрового диапазона.
Предпочтительно, используемые электроды могут быть поддающимися растягиванию, так, чтобы они следовали за деформацией материала слоя ЭАП. Материалы, подходящие для электродов, также известны, и могут, например, быть выбраны из группы, состоящей из тонких металлических пленок, таких как золото, медь, или алюминий или органические проводники, такие как углеродная сажа, углеродные нанотрубки, графен, поли-анилин (PANI), поли-3,4-этилендиокситиофен (PEDOT), например, поли-3,4-этилендиокситиофен поли(стиросульфанат) (PEDOT:PSS). Металлизированные пленки полиэстера также могут быть использованы, например, металлизированный терефталат полиэтилен (PET), например, используя алюминиевое покрытие.
Материалы для различных слоев выбираются, например, учитывая упругие модули (модули Юнга) различных слоев.
Дополнительные слои, к рассмотренным выше, могут быть использованы для приспособления электрического или механического поведения устройства, например, дополнительные полимерные слои.
Устройства ЭАП - это типично приводимые в действие электрическим полем устройства, но ионные устройства также могут быть использованы. Ионные устройства могут быть основанными на ионном полимере - металлические композиты (IPMC) или сопряженные полимеры. Ионный полимер - металлический композит (IPMC) -это синтетический композитный наноматериал, который отображает искусственное поведение мускула при приложенном напряжении или электрическом поле.
IPMC составлены из ионного полимера, подобного Nafion или Flemion, поверхности которого химически покрыты или физически покрыты проводниками, такими как платина или золото, или электродами на основе углерода. При приложенном напряжении, миграция и перераспределение ионов вследствие наложенного на полосу IPMC напряжения приводит к изгибной деформации. Полимер - это ионно-обменная мембрана из набухающего при растворении полимера. Поле заставляет перемещаться катионы на сторону катода вместе с водой. Это приводит к перестройке гидрофильных кластеров и к расширению полимера. Механическая деформация в области катода приводит к механическому напряжению полимерной матрицы, приводя к изгибу в направлении к аноду. Изменение прикладываемого напряжения на обратное инвертирует изгиб.
Если электроды размещены в несимметричной конфигурации, наложенное напряжение может вызвать все виды деформаций, например, скручивание, вращение, осевую закрутку, поворот, и несимметричную изгибную деформацию.
Устройство может быть использовано как единственный актуатор, или иначе - может быть линия или матрица устройств, например, для обеспечения контроля 2D или 3D контура.
Изобретение может быть применено во многих приложениях ЭАП, включая примеры, где необходима пассивная матричная решетка актуаторов, в частности, в результате пороговой функции, описанной выше для некоторых примеров актуатора.
Во многих приложениях главная функция продукта основывается на (локальной) манипуляции человеческой ткани, или активации контактирующих с тканью границ раздела. В таких приложениях ЭАП актуаторы предоставляют уникальные преимущества, главным образом, благодаря малому форм-фактору, гибкости и высокой плотности энергии. Следовательно, ЭАП могут быть легко интегрированы в программном обеспечении, 3D формы и/или миниатюрных продуктах и границах. Примеры таких приложений:
Косметические лечения кожи, например, устройства активации кожи в форме кожных пластырей на основе ЭАП, которые применяют постоянную или циклическую продольную деформацию кожи для растяжения кожи или для уменьшения морщин;
Респираторные устройства с интерфейсной маской пациента, которая имеет активную подушку или уплотнение на основе ЭАП, для предоставления переменного нормального давления на кожу, что уменьшает или предотвращает лицевые красные отметки;
Электрические бритвы с адаптивной бритвенной головкой. Высота поверхностей, контактирующих с кожей, может быть отрегулирована, используя актуаторы ЭАП для влияния на баланс между близостью и раздражением;
Устройства оральной очистки, такие как воздушный очиститель зубных промежутков с динамическим актуатором сопла для улучшения досягаемости аэрозоля, особенно в пространствах между зубами. Альтернативно, зубные щетки могут быть снабжены активизированными волосяными пучками;
Устройства бытовой электроники или сенсорные экраны, которые предоставляют локальную тактильную обратную связь через матрицу преобразователей ЭАП, которая интегрирована в пользовательский интерфейс или находится вблизи пользовательского интерфейса;
Катетеры с управляемым наконечником для получения возможности простой навигации в извилистых кровеносных сосудах.
Другая категория соответственного приложения, в которой имеются преимущества от актуаторов ЭАП, относится к модификации светоизлучения. Оптические элементы, такие как линзы, отражательные поверхности, решетки и т.д. могут быть сделаны адаптивными посредством формы, или посредством адаптации положения, используя актуаторы ЭАП. Здесь преимущество ЭАП заключается, например, в более низкой потребляемой мощности.
Другие вариации раскрытых вариантов реализации могут быть поняты и реализованы специалистами в данной области техники при осуществлении заявленного изобретения, из исследования чертежей, раскрытия, и приложенной формулы изобретения. В формуле изобретения, выражение "содержащий" не исключает другие элементы или этапы, и выражение в единственном числе не исключает множества. Тот факт, что некоторые положения приведены во взаимно различающихся зависимых пунктах формулы изобретения, не означает, что комбинация этих положений не может быть использована для получения преимуществ. Любые условные обозначения в формуле изобретения не должны рассматриваться как ограничение объема притязаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПОТОКА И СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2017 |
|
RU2768159C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
| ПРИВОДНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2736071C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737790C2 |
| УСТРОЙСТВО АКТУАТОРА НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2723889C2 |
| ЭАП-ПРИВОД И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2750680C2 |



Изобретения относятся к способам управления устройствами, содержащими электроактивные материалы, для регулировки трения, а также к устройствам, содержащим электроактивные материалы, которые пригодны для использования при регулировке трения. Способ управления устройством, имеющим элемент активации, содержащий электроактивный материал, выполненный с возможностью деформации при приведении в действие, при этом упомянутый способ содержит этапы генерации сигнала активации для того, чтобы вызывать активацию элемента активации, причем активация имеет максимальную первую частоту активации, генерации сигнала вибраций для того, чтобы вызывать вибрацию элемента активации для уменьшения трения, причем вибрация имеет частоту, большую, чем первая частота активации, и подачи сигнала активации на по меньшей мере часть электроактивного материала и подачи сигнала вибраций на по меньшей мере часть электроактивного материала. Исполнительное устройство содержит электроактивный полимер (30) и контроллер (34) для подачи сигнала приведения в действие на электроактивный полимер, чтобы вызвать его деформацию. Контроллер приспособлен для создания сигнала, который содержит компоненту переменного тока, вызывающую вибрацию (40, 42) электроактивного полимера. Эта вибрация используется для уменьшения трения между электроактивным полимером и смежным компонентом (32). Компонент переменного тока может быть наложен на уровень управления низкочастотного переменного тока или на уровень управления постоянного тока. Изобретения обеспечивают способ и устройство, в которых может быть реализовано снижение трения, или же реализовано управляемое трение, и которые могут быть осуществлены простым образом и с низкими затратами. 3 н. и 12 з.п. ф-лы, 13 ил.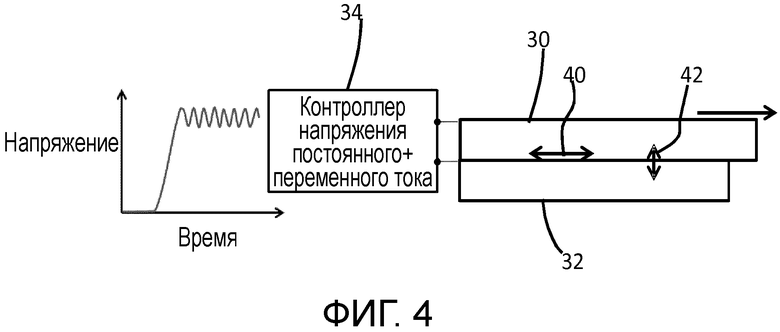
1. Способ управления устройством, имеющим элемент активации, содержащий электроактивный материал, выполненный с возможностью деформации при приведении в действие, при этом упомянутый способ содержит этапы:
генерации сигнала активации для того, чтобы вызывать активацию элемента активации, причем активация имеет максимальную первую частоту активации;
генерации сигнала вибраций для того, чтобы вызывать вибрацию элемента активации для уменьшения трения, причем вибрация имеет частоту, большую, чем первая частота активации; и
подачи сигнала активации на по меньшей мере часть электроактивного материала и подачи сигнала вибраций на по меньшей мере часть электроактивного материала.
2. Способ по п. 1, причем устройство содержит подложку, напротив которой расположен элемент активации, причем вибрация элемента активации служит для уменьшения трения между подложкой и элементом активации.
3. Способ по п. 2, причем подложка содержит дополнительный элемент активации по п. 1, который может приводиться в действие теми же сигналом активации и сигналом вибраций или другими сигналами.
4. Способ по п. 1, причем устройство должно перемещаться вдоль внешней поверхности при использовании, причем вибрация элемента активации служит для уменьшения трения между элементом активации и внешней поверхностью.
5. Способ по любому из предыдущих пунктов, причем в период приведения в действие сигнал активации и сигнал вибраций подаются на электроактивный материал так, что они накладываются в течение периода приведения в действие.
6. Способ по любому из предыдущих пунктов, причем сигнал активации, содержит не колебательный сигнал и сигнал вибраций содержит:
импульсный сигнал, включающий в себя один или более импульсов, и/или
колебательный сигнал.
7. Способ по любому из предыдущих пунктов 1-5, причем:
сигнал активации содержит амплитуду сигнала активации, и сигнал вибраций содержит амплитуду сигнала вибраций, и амплитуда сигнала вибраций составляет меньше чем 20%, или меньше чем 10% или меньше чем 5% от амплитуды сигнала активации; или
сигнал активации представляет собой колебательный сигнал, содержащий частоту сигнала активации, и сигнал вибраций содержит частоту сигнала вибраций, которая выше, чем частота сигнала активации.
8. Способ по любому из предыдущих пунктов, причем сигнал вибраций содержит частоту сигнала вибраций, которая выбирается как: <1 МГц, <100 кГц, <10 кГц, или <1 кГц, и причем необязательно сигнал вибраций содержит по меньшей мере одну частоту сигнала вибраций, которая равна резонансной частоте или частоте собственных колебаний элемента активации.
9. Способ по любому из предыдущих пунктов, содержащий этапы:
в первом рабочем режиме подачи сигнала активации и сигнала вибраций на электроактивный материал; и
во втором рабочем режиме подачи только сигнала активации, но не сигнала вибраций, на электроактивный материал.
10. Способ по любому из предыдущих пунктов, в котором сигнал активации содержит амплитуду сигнала активации, и сигнал вибраций содержит амплитуду сигнала вибраций и частоту сигнала вибраций, при этом упомянутый способ содержит этапы:
выбора амплитуды сигнала активации для обеспечения желаемого уровня активации; и/или
выбора амплитуды сигнала вибраций для обеспечения желаемого уровня вибрации; и/или
выбора частоты сигнала вибраций для получения вибраций на резонансной частоте.
11. Считываемый компьютером носитель, содержащий машинный код, который, когда он выполняется на компьютере, осуществляет способ по любому из пп. 1-10.
12. Устройство активации, содержащее:
элемент активации, содержащий электроактивный материал (30), выполненный с возможностью деформации при приведении в действие;
контроллер (34) сконфигурированный для осуществления этапов любого из способов по пп. 1-10.
13. Устройство активации по п. 12, дополнительно содержащее:
первую электродную компоновку, сконфигурированную для приема сигнала активации, а также для подачи его на первую часть электроактивного материала; и
вторую электродную компоновку, сконфигурированную для приема сигнала вибраций, а также для подачи его на дополнительную часть электроактивного материала, которая является той же самой, или отличающейся от первой части электроактивного материала.
14. Устройство активации по п. 12 или 13, содержащее:
тело для направленного перемещения вдоль внутренней направляющей или вдоль внешнего канала, при этом тело содержит элемент активации и, необязательно, внутреннюю направляющую или внешний канал, содержащий подложку; или
внутреннюю направляющую или внешний канал для направленного перемещения тела, при этом внутренняя направляющая или внешний канал содержат элемент активации и, необязательно, тело, содержащее подложку.
15. Устройство активации по пп. 12, 13 или 14, причем электроактивный материал содержит одно или более из следующего: диэлектрический эластомер, пьезоэлектрический полимер, сегнетоэлектрический релаксорный полимер или сегнетоэлектрический полимер, или электрострикционный полимер.
| Способ изготовления гибких металлических волноводов методом электролиза | 1948 |
|
SU74153A1 |
| US 2003067245 A1, 10.04.2003 | |||
| ТЕРМОПЛАСТИЧНАЯ ПОВЯЗКА, ОБЛАДАЮЩАЯ ИСКЛЮЧИТЕЛЬНОЙ ДЕФОРМАТИВНОСТЬЮ И ЖЕСТКОСТЬЮ, И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2654194C2 |
| US 8569935 B1, 29.10.2013. | |||

