ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к исполнительным или сенсорным устройствам, которые используют электроактивные полимеры.
УРОВЕНЬ ТЕХНИКИ
Электроактивные полимеры (ЕАР) представляют собой зарождающийся класс материалов в области материалов, дающих электрический отклик. Полимеры ЕАР могут действовать в качестве сенсорных или исполнительных элементов и легко могут быть изготовлены в различных формах, делающих возможной легкую интеграцию в самых разнообразных системах.
Были разработаны материалы, демонстрирующие характеристики, такие как напряжение и деформация при срабатывании, которые были значительно улучшены за последние десять лет. До приемлемых уровней для разработки продукта были уменьшены технологические риски, так что полимеры ЕАР коммерчески и технически стали представлять всевозрастающий интерес. Преимущества полимеров ЕАР включают низкую мощность, малый геометрический структурный фактор, гибкость, бесшумное функционирование, точность, возможность высокого разрешения, короткие времена отклика и циклическое срабатывание.
Улучшенные эксплуатационные характеристики и конкретные преимущества материала полимера ЕАР являются причиной их применимости в новых областях применения.
Устройство на основе полимера ЕАР может быть использовано в любой области применения, в которой желательной является небольшая величина перемещения компонента или характерного элемента, на основе электрического срабатывания. Подобным образом, технология может быть использована для восприятия небольших перемещений.
Использование полимеров ЕАР делает возможными функции, которые были невозможными прежде, или обеспечивает получение большого преимущества в сопоставлении с широко распространенными решениями для сенсорного/исполнительного элементов вследствие объединения относительно больших деформации и усилия в небольшом объеме или при тонком геометрическом структурном факторе в сопоставлении с широко распространенными исполнительными элементами. Полимеры ЕАР также обеспечивают бесшумное функционирование, точное электронное управление, быстрый отклик и большой диапазон возможных частот срабатывания, такой как 0-20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на материалы с полевым приведением в действие и ионным приведением в действие.
Примерами полимеров ЕАР с полевым приведением в действие являются диэлектрические эластомеры, электрострикционные полимеры (такие как полимерные релаксоры на основе поливинилидендифторида или полиуретаны) и жидкокристаллические эластомеры (LCE).
Примерами полимеров ЕАР с ионным приведением в действие являются сопряженные полимеры, полимерные композиты на основе углеродных нанотрубок (CNТ) и ионные полимер-металлические композиты (IPMC).
Полимеры ЕАР с полевым приведением в действие срабатывают под воздействием электрического поля в результате наличия прямой электромеханической связи, в то время как механизм срабатывания для ионных полимеров ЕАР задействует диффузию ионов. Оба класса имеют множество членов семейства, при этом каждому из них свойственны свои собственные преимущества и недостатки.
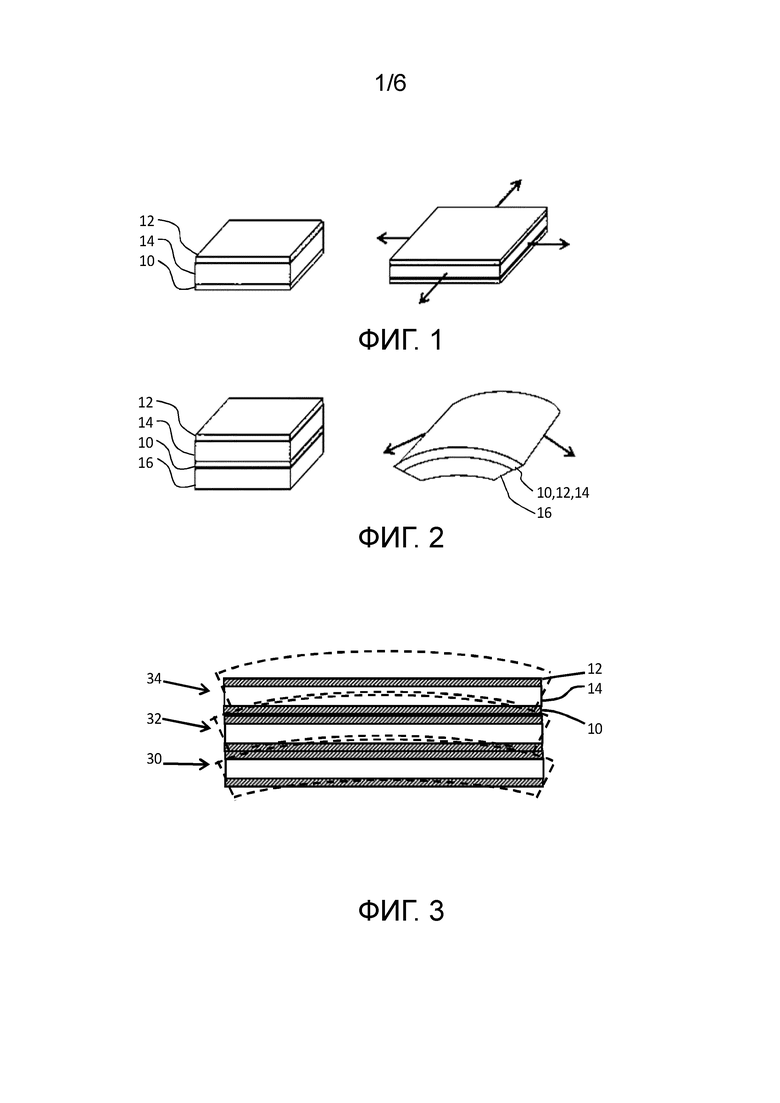
Фигуры 1 и 2 демонстрируют два возможных режима функционирования для устройства на основе полимера ЕАР.
Устройство включает слой электроактивного полимера 14, заключенный в сэндвичевую конструкцию между электродами 10, 12 на противоположных сторонах слоя электроактивного полимера 14.
Фигура 1 демонстрирует устройство, которое не зафиксировано в зажиме. Для стимулирования расширения слоя электроактивного полимера во всех направлениях, как это продемонстрировано, используют разность потенциалов.
Фигура 2 демонстрирует устройство, которое разработано так, что расширение возникает только в одном направлении. Устройство опирается на слой носителя 16. Для стимулирования искривления или выгибания слоя электроактивного полимера используют разность потенциалов.
Природа данного перемещения, например, имеет своим происхождением взаимодействие между активным слоем, который расширяется при срабатывании, и пассивным слоем носителя. Для получения асимметричного искривления относительно оси, как это продемонстрировано, например, может быть использована молекулярная ориентация (растяжение пленки), что стимулирует перемещение в одном направлении.
Расширение в одном направлении может представлять собой результат наличия асимметрии в полимере ЕАР, или оно может представлять собой результат наличия асимметрии свойств в слое носителя, или может иметь место комбинация из обоих вариантов.
Расширение и последующие перемещение или изменение формы устройства на основе полимера ЕАР во множестве случаев используют для передачи усилия при срабатывании внешнему компоненту. В зависимости от природы внешнего компонента требуемое усилие будет варьироваться. В некоторых случаях усилие, передаваемое устройством, имеющим один слой полимера ЕАР, может оказаться недостаточным для предполагаемого назначения.
Способы увеличения усилия для изгибающихся исполнительных элементов на основе электроактивного полимера известны. Например, в результате утолщения исполнительных элементов усилие (а также разность потенциалов) увеличивается. Однако, это также в результате приводит к получению увеличенных внутренних напряжений и жесткости, что поэтому будет сопровождаться уменьшенным интервалом отклонения.
Также известным является ламинирование множества одиночных элементов на основе полимера ЕАР в стопке. Усилие, передаваемое утолщенной стопкой, увеличивается, но без возникновения потребности в увеличении разности потенциалов. Однако, опять-таки в результате увеличенной совокупной толщины увеличиваются и уровни внутреннего напряжения, что уменьшает ход исполнительного элемента. В направлении к поверхностям стопки исполнительных элементов возрастают напряжения растяжения и сжатия в слое полимера ЕАР (или материале подкладки или электродах). Данные внутренние напряжения уменьшают коэффициент полезного действия исполнительного элемента, так что имеет место менее подходящая для использования передача энергии (что может быть выражено в виде усилие при срабатывании × ход при срабатывании).
Поэтому существует потребность в конструктивном исполнении исполнительного элемента, которое делает возможным увеличение передаваемого усилия, но без возникновения проблемы, связанной с уменьшением коэффициента полезного действия и поэтому передачи энергии. Подобным образом, увеличение коэффициента полезного действия может сделать возможным более эффективное генерирование сигналов в ответ на приложенное усилие для области применения сенсорного элемента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Одна цель изобретения заключается в, по меньшей мере, частичном удовлетворении вышеупомянутой потребности. Достижения цели добиваются при использовании изобретения в соответствии с определением изобретения в независимых пунктах формулы изобретения. Зависимые пункты формулы изобретения обеспечивают получение выгодных вариантов осуществления.
В соответствии с примерами, соответствующими одному аспекту изобретения, предлагается изгибающееся исполнительное устройство или сенсорное устройство для восприятия изгибания, включающее в себя:
стопку модулей на основе электроактивного полимера, при этом каждый из них включает, по меньшей мере, один слой электроактивного полимера и управляющие электроды для приведения в действие слоя электроактивного полимера, так чтобы он деформировался в ответ на сигнал приведения в действие, поданный на электроды для приведения в действие, или для восприятия сигнала, генерируемого в ответ на деформирование слоя электроактивного полимера,
где соседние модули на основе электроактивного полимера в стопке обладают способностью скольжения друг относительно друга.
Данная компоновка делает возможным увеличение совокупного усилия при срабатывании без возникновения потребности в увеличенной разности потенциалов для приведения в действие, и она также позволяет избежать возникновения проблем, связанных с нарастанием напряжения. Во время изгибания на межфазной поверхности между соседними модулями на основе электроактивного полимера имеет место относительное скольжение, что, тем самым, позволяет избежать нарастания напряжения и делает возможными более эффективное преобразование электрической энергии в механическую или улучшенную функциональность сенсорного элемента при преобразовании механического входного воздействия в воспринимаемый электрический сигнал.
В одной первой компоновке модули на основе электроактивного полимера укладывают в стопку при нахождении соседних модулей на основе электроактивного полимера во фрикционном контакте друг с другом. Данный фрикционный контакт может сделать возможным относительное скольжение модулей, и данное относительное скольжение ослабляет напряжения в модулях, как это упоминалось выше. Таким образом, определяют ламинированную конструкцию, но при отсутствии фиксированной связи между слоями в ламинате. Вместо этого используют механическую связь, которая фиксирует модули друг с другом в зажиме в направлении укладывания в стопку, но делает возможным скользящее перемещение.
Каждый модуль может, например, включать электроды на противоположных сторонах слоя электроактивного полимера, где электроды для приведения в действие формируют из слоя низкофрикционного, эластичного или вязкого материала. В результате выбора подходящих для использования материалов для электродных слоев укладывание модулей в стопку в контакте друг с другом может привести к получению низкофрикционной межфазной поверхности между модулями.
Вместо этого между каждой соседней парой модулей на основе электроактивного полимера может иметь место дополнительный слой для уменьшения трения. Это делает возможным уменьшение трения между соседними модулями в стопке при одновременном обеспечении возможности использования обычных материалов для отдельных модулей на основе полимера ЕАР.
В одном наборе примеров слой для уменьшения трения может быть отдельным, или же он может быть связанным с модулем на основе электроактивного полимера на одной стороне. Это приводит к получению либо одной поверхности слоя для уменьшения трения, где имеет место относительное скольжение, либо относительное скольжение может иметь место на обеих поверхностях. После этого слой для уменьшения трения обычно включает слой твердого материала.
Данный слой твердого материала может, например, включать полимер PTFE, фторполимер, текстиль, текучую среду, гель, пеноматериал или фольгу.
В еще одном наборе примеров слой для уменьшения трения связан с модулями на основе электроактивного полимера на каждой стороне, и слой для уменьшения трения включает эластичный слой или слой вязкого материала.
Данным образом стопку связывают воедино (что может, например, позволить избежать возникновения потребности в дополнительной механической связи), но слой для уменьшения трения делает возможным относительное скольжение между его противоположными лицевыми поверхностями (в направлении укладывания в стопку). Таким образом, становится возможным сдвиг в материале слоя для уменьшения трения.
В еще одной компоновке слой для уменьшения трения включает распорную конструкцию. Это позволяет избежать возникновения контакта между модулями на большей части их площади. Распорная конструкция включает в себя распорные (дистанционные) ограничители, которые располагают во избежание появления контакта и для обеспечения возможности относительного скольжения.
Во всех примерах между модулями на основе электроактивного полимера может быть предусмотрено наличие механической связи, которая фиксирует относительные позиции в направлении укладывания в стопку, но делает возможным относительное перемещение в направлении в плоскости.
Устройство может, кроме того, включать держатель для задания расположения в плоскости для стопки. Данный держатель может быть использован вместо обеспечения наличия жесткой фиксации со стопкой, для того чтобы изгибание стопки не было бы ограничено. Например, может иметь место боковое пространство со всех сторон стопки, для того чтобы стопка характеризовалась бы наличием ограниченной величины перемещения в плоскости, но демонстрировала бы наибольшие ход или передачу усилия или способность восприятия усилия в перпендикулярном направлении (то есть, в направлении укладывания в стопку).
Держатель может включать корпус, имеющий выемку, в которой располагается стопка модулей. Поверх стопки модулей может быть предусмотрено наличие крышки, которая формирует интерфейс на входе или на выходе для устройства. Стопка модулей может, например, быть заключена в сэндвичевую конструкцию между основанием выемки и крышкой при отсутствии физического соединения между модулями стопки.
Устройство, например, включает изгибающийся исполнительный элемент. Усилие, передаваемое устройством, увеличивается в результате наличия множества уложенных в стопку исполнительных элементов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь будут подробно описываться примеры изобретения при обращении к прилагающимся чертежам, в числе которых:
Фигура 1 демонстрирует известное устройство на основе электроактивного полимера, которое не зафиксировано в зажиме; Фигура 2 демонстрирует известное устройство на основе электроактивного полимера, которое ограничено слоем подкладки;
Фигура 3 демонстрирует первый пример исполнительного устройства на основе полимера ЕАР;
Фигура 4 демонстрирует графики, иллюстрирующие механические эксплуатационные характеристики устройства с фигуры 3 в сопоставлении с тем, что имеет место для отдельных исполнительных элементов, которые составляют устройство;
Фигуры от 5(а) до 5(d) демонстрируют четыре различных возможных способа укладывания в стопку исполнительного элемента в общих чертах, а фигура 5(е) демонстрирует один пример более подробно;
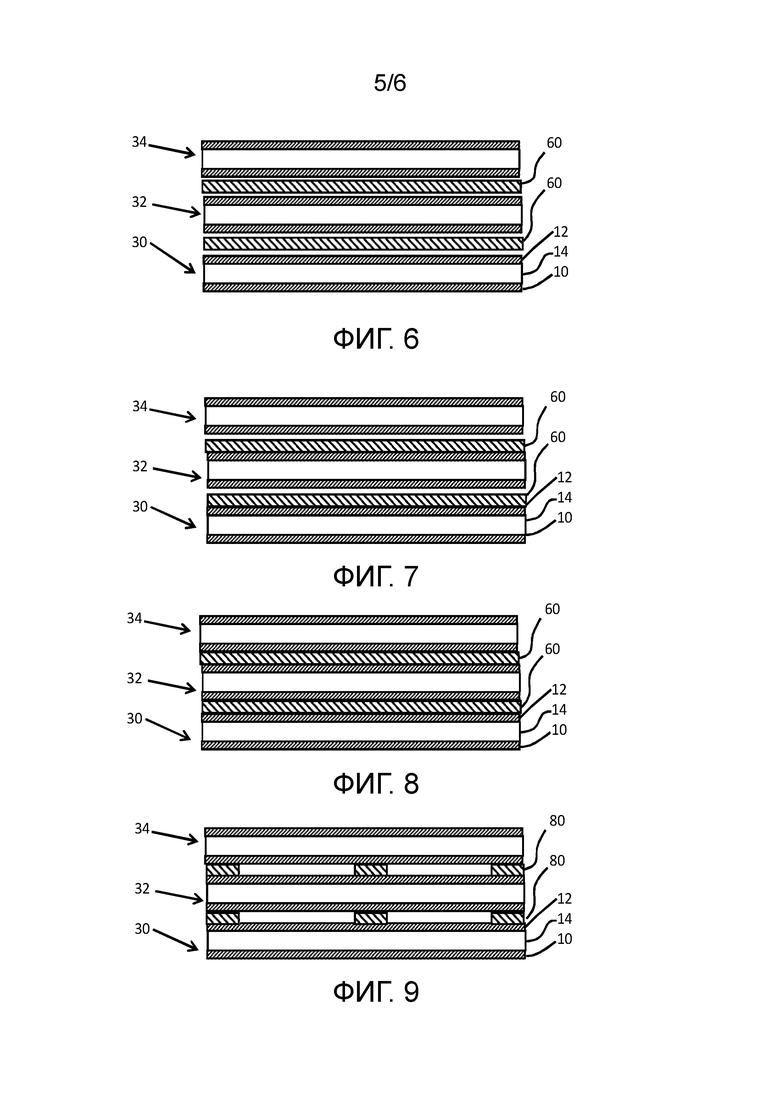
Фигура 6 демонстрирует второй пример исполнительного устройства на основе полимера ЕАР;
Фигура 7 демонстрирует третий пример исполнительного устройства на основе полимера ЕАР;
Фигура 8 демонстрирует четвертый пример исполнительного устройства на основе полимера ЕАР;
Фигура 9 демонстрирует пятый пример исполнительного устройства на основе полимера ЕАР;
Фигура 10 демонстрирует шестой пример исполнительного устройства на основе полимера ЕАР; и
Фигура 11 демонстрирует компоновку в плоскости для электродов.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение предлагает исполнительное или сенсорное устройство на основе электроактивного полимера, включающее стопку модулей на основе электроактивного полимера. Конструктивное исполнение модулей обеспечивает их изгибание, то есть, генерирование или восприятие деформации вне плоскости слоев стопки, а именно, в направлении укладывания в стопку. Соседние модули на основе электроактивного полимера (то есть, отдельные модули исполнительных или сенсорных элементов) в стопке обладают способностью скольжения друг относительно друга. В случае исполнительного элемента это означает возможность реализации увеличенного усилия при срабатывании без возникновения потребности в увеличенной разности потенциалов для приведения в действие, и это также позволяет избежать возникновения проблем, связанных с нарастанием напряжения, в результате обеспечения возможности скольжения между отдельными исполнительными элементами в стопке. Скользящее движение, которое становится возможным, ориентировано в направлении в плоскости, перпендикулярно направлению укладывания в стопку. Данное относительное скользящее движение, например, требуется при изгибании исполнительного элемента, поскольку различные уровни в стопке будут характеризоваться различными радиусами изгибания и/или длинами дуги. Как результат, при обеспечении возможности относительного сдвигового перемещения между слоями избегают нарастания напряжений в слоях.
Компоновка при наличии возможности скольжения обозначает то, что различные модули не связаны жестко друг с другом в направлениях в плоскости.
Теперь изобретение будет описываться при обращении к различным конструктивным исполнениям исполнительных элементов. Однако, те же самые конструктивные характерные элементы также могут быть использованы и в качестве сенсорного элемента. Таким образом, в представленных ниже примерах используют стопку исполнительных элементов, но в более общем случае они представляют собой «модули» на основе полимера ЕАР, которые могут быть модулями исполнительных элементов или модулями сенсорных элементов.
Фигура 3 демонстрирует одну первую компоновку, включающую три исполнительных элемента 30, 32, 34, которые укладывают в стопку при наличии физического фрикционного контакта друг с другом. Каждый исполнительный элемент включает слоистую конструкцию 10, 12, 14 в соответствии с представленным выше разъяснением изобретения, необязательно при включении слоя носителя (подкладки), хотя это и не продемонстрировано на фигуре 3.
Исполнительные элементы являются изгибающимися исполнительными элементами, которые деформируются в интервале между плоским состоянием (продемонстрированным сплошными линиями) и изогнутым состоянием (продемонстрированным пунктирными линями). Собственно говоря, плоское состояние необязательно должно быть плоским, и оно также может характеризоваться изгибанием, демонстрирующим больший радиус кривизны в сопоставлении с тем, что имеет место для изогнутого состояния. Для облегчения представления в некоторых из представленных ниже примеров (в частности, на фигурах от 6 до 10) проиллюстрировано только плоское состояние. Во избежание сомнений все примеры в настоящем документе представляют собой изгибающиеся исполнительные элементы.
Фрикционный контакт делает возможным относительное скольжение исполнительных элементов, и данное относительное скольжение ослабляет напряжения в исполнительных элементах. Таким образом, определяется ламинированная конструкция, но при отсутствии фиксированной связи между слоями в ламинате. Вместо этого используют механическую связь (не показана на фигуре 3), которая фиксирует в зажиме исполнительные элементы друг с другом в направлении укладывания в стопку, но делает возможным скользящее перемещение в перпендикулярном направлении в плоскости.
Данная механическая связь может включать соединение, которое простирается в направлении укладывания в стопку. Например, центральная соединительная деталь может зафиксировать относительные позиции в плоскости для различных исполнительных элементов, для того чтобы способ перемещения исполнительных элементов при их деформировании был бы ограничен симметричным образом.
В альтернативном варианте, стопка исполнительных элементов может быть расположена в корпусе, который фиксирует боковые позиции исполнительных элементов стопки.
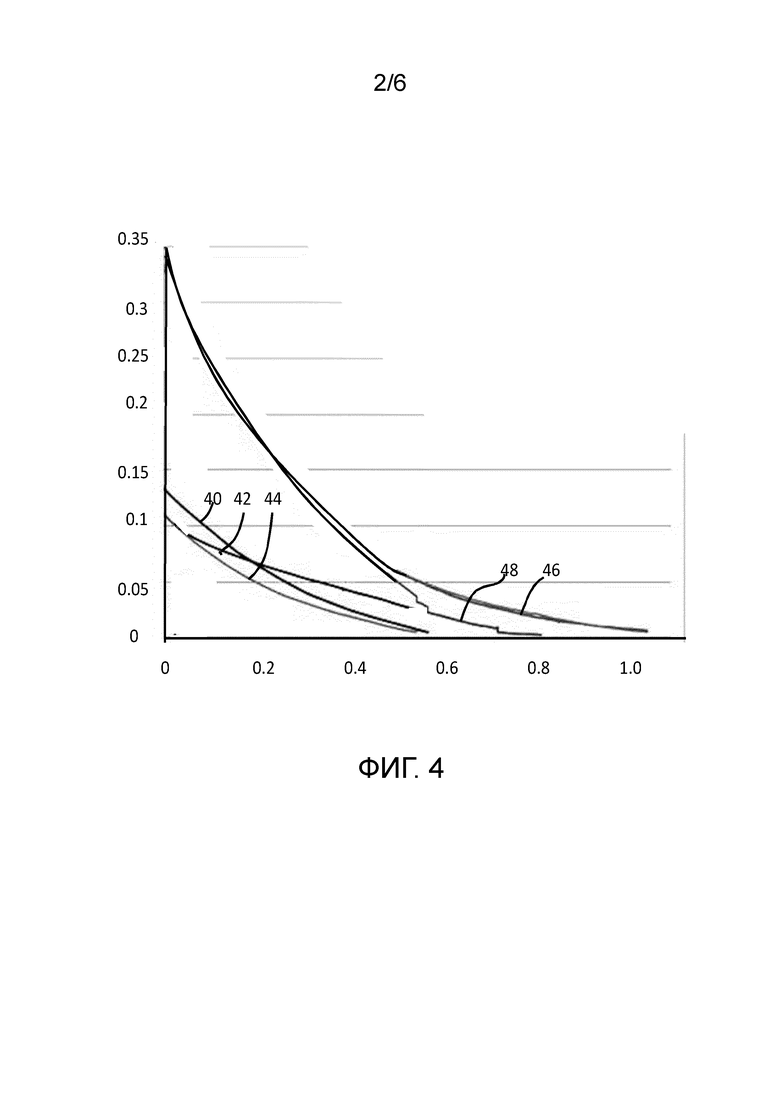
Испытания для конструкции с фигуры 3 проводили в целях сопоставления усилия при срабатывании, которое может быть произведено, с усилием при срабатывании, которое может быть достигнуто при использовании отдельных модулей, которые составляют конструкцию.
Фигура 4 демонстрирует график зависимости генерированного усилия при срабатывании (ось у) от смещения (ось х). Смещение измеряют в виде отступления от плоскости (то есть, максимального отступления по разности высот от плоскости).
Графики 40, 42 и 44 относятся к трем откликам отдельных исполнительных элементов. График 46 относится к объединенному исполнительному элементу. График 48 имеет в своей основе теоретическое вычисление ожидаемого отклика.
Все измерения проводятся при 250 вольтах. Электроактивный полимер может быть использован для генерирования максимального усилия, но это соответствует состоянию при отсутствии смещения. В альтернативном варианте, может быть получено максимальное смещение, но тогда оно не может генерировать усилие. Таким образом, при каждом смещении (высоте изогнутого исполнительного элемента) измеряют усилие, которое исполнительный элемент может генерировать в данной позиции в отношении зонда для измерения усилия. Это может быть определено в результате очень легкого изгибания исполнительного элемента, а после этого увеличения внешнего усилия вплоть до начала деформирования полимера ЕАР вплоть до достижения им своего плоского состояния. Данным образом получают максимальное усилие при нулевой высоте изгибания. Затем поступательно уменьшают внешнее усилие, приложенное к полимеру ЕАР, и полимер ЕАР начинает изгибаться. Данным образом измеряют усилие на каждой высоте, всегда при той же самой разности потенциалов для приведения в действие.
Совокупное усилие при срабатывании представляет собой сумму усилий для отдельных исполнительных элементов. Каждый исполнительный элемент включает слой полимера ЕАР (который сам может включать множество подслоев), электродные слои и слой подкладочного носителя.
Фигура 3 демонстрирует то, что каждый исполнительный элемент имеет электроды для приведения в действия 10, 12 на противоположных сторонах слоя электроактивного полимера, и данные электроды для приведения в действие находятся в контакте друг с другом.
В таком случае разности потенциалов на соседних электродах должны быть идентичными. Поскольку срабатывание для полимера ЕАР является симметричным по отношению к полярности приложенной разности потенциалов, разности потенциалов, приложенные к соседним слоям, действительно, могут быть идентичными при одновременном все еще срабатывании всех модулей. Например, нижний электрод может быть установлен на+120 В, пара электродов в следующем стыке может быть установлена на - 120 В, пара электродов в следующем стыке может быть установлена на+120 В и так далее. Таким образом, отсутствует какая-либо потребность в обеспечении наличия электрической изоляции между электродами, которые являются соседними.
Стандартные материалы электродов, использующиеся в устройствах на основе полимера ЕАР, могут быть введены в контакт для определения фрикционной (но не связанной) межфазной поверхности. Однако, электроды вместо этого могут быть получены из слоя низкофрикционного, эластичного или вязкого материала. В результате выбора подходящих для использования материалов для электродных слоев укладывание в стопку исполнительных элементов в контакте друг с другом может привести к получению более низкофрикционной межфазной поверхности между исполнительными элементами.
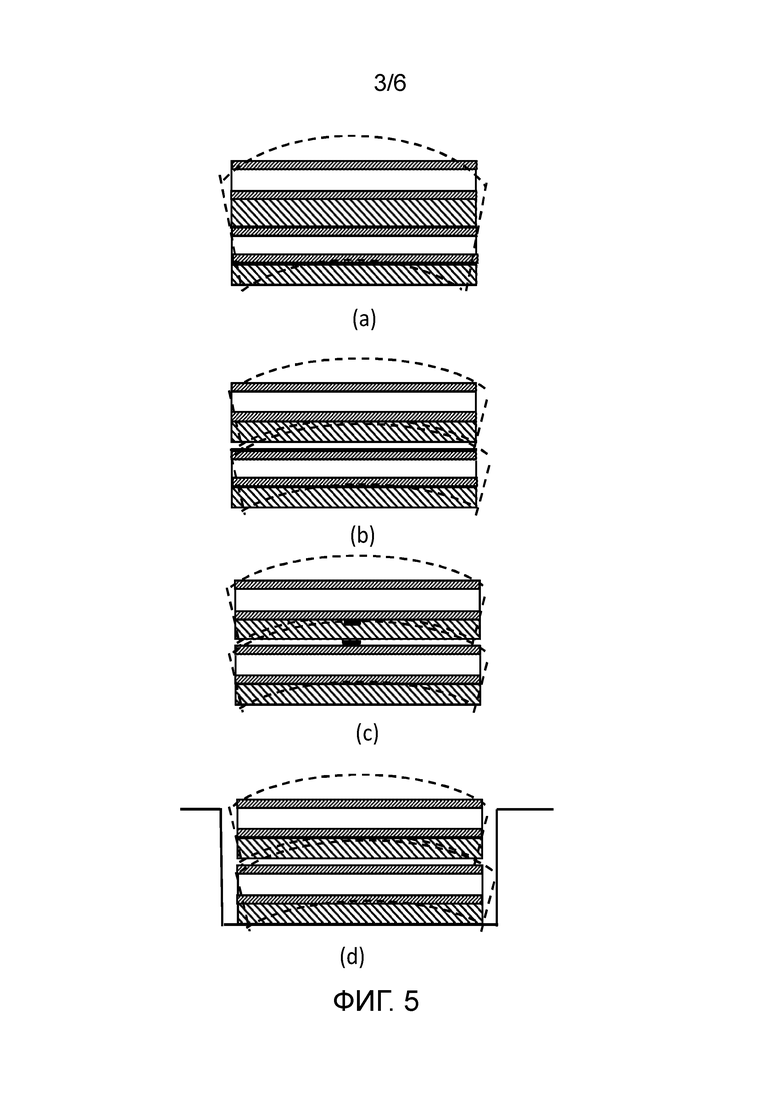
Фигура 5 демонстрирует три возможные конфигурации для сопоставления со связанной ламинатной конструкцией.
Фигура 5(а) демонстрирует два исполнительных элемента (при этом каждый из них включает слой носителя, два электродных слоя и слой полимера ЕАР), связанные друг с другом. Они деформируются в виде одного модуля (как это продемонстрировано пунктирными линиями), что приводит к появлению больших напряжений растяжения на внешней поверхности с большим радиусом и больших напряжений сжатия на внутренней поверхности с меньшим радиусом.
Фигура 5(b) демонстрирует два исполнительных элемента (при этом опять-таки каждый из них включает слой носителя, два электродных слоя и слой полимера ЕАР), неплотно уложенные в стопку. Каждый из них деформируется независимо при наличии относительного скольжения.
Фигура 5(с) демонстрирует возможность фиксации двух исполнительных элементов с фигуры 5(b) друг с другом в одной позиции, например, в середине.
Фигура 5(d) демонстрирует возможность фиксации двух исполнительных элементов с фигуры 5(b) в полости для ограничения какого-либо бокового перемещения.
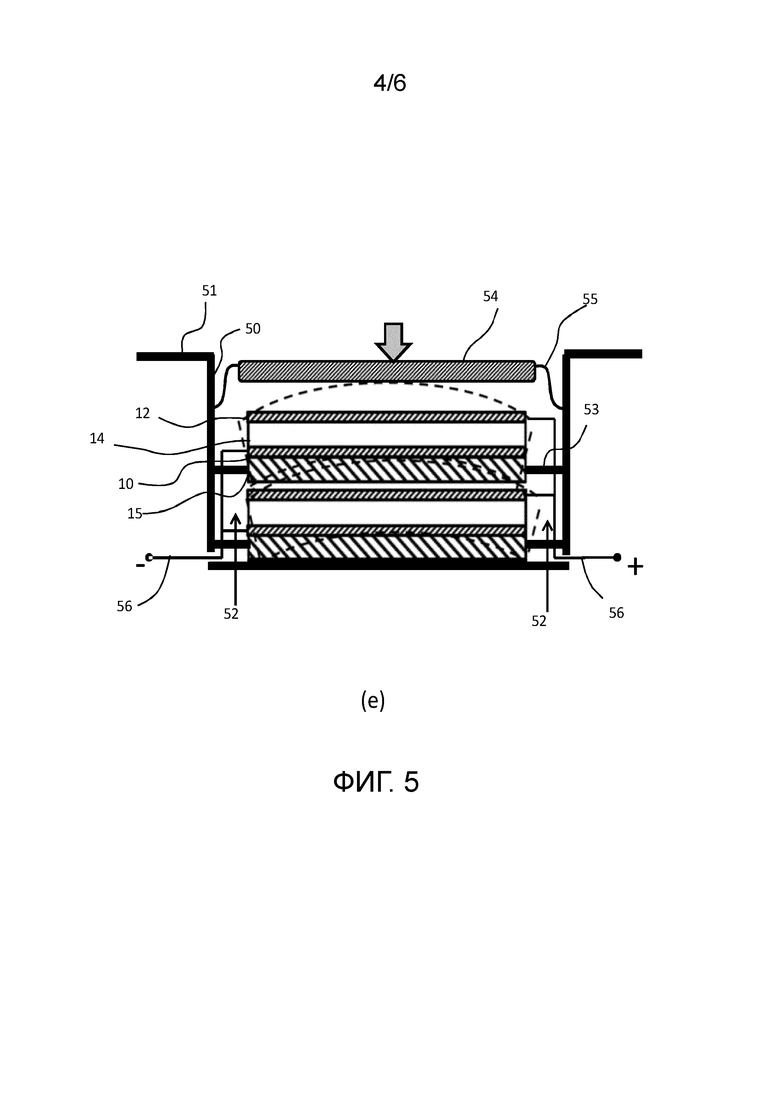
Фигура 5(е) демонстрирует вариант воплощения с фигуры 5(d) более подробно.
Полость 50 представляет собой выемку в держателе 51 для задания расположения в плоскости для стопки. Это позволяет избежать возникновения потребности в каких-либо жестких фиксаторах (в направлении в плоскости) для слоя полимера ЕАР 14 каждого модуля, для того чтобы изгибание стопки не было бы ограничено. Например, имеется боковое пространство 52 со всех сторон слоев полимера ЕАР 14 (и электродных слоев) в стопке в полости 50, так что стопка характеризуется наличием ограниченной величины перемещения в плоскости, но демонстрирует наибольшие ход и передачу усилия или способность восприятия усилия в перпендикулярном направлении (то есть, в направлении укладывания в стопку). Для центрирования стопки в выемке могут быть использованы анкерные детали 53, и данные анкерные детали 53 обеспечивают расположение опорной подложки 15 для каждого отдельного модуля. Данное расположение предотвращает появление нежелательных боковых смещений, вызывающих износ, но не оказывает неблагоприятного воздействия на передачу усилия или функциональность сенсорного элемента. Анкерные детали 53 вступают в контакт с опорными подложками 15 при использовании геометрической подгонки при отсутствии фиксации с опорными подложками 15.
Устройство имеет крышку 54, которая исполняет функцию выхода для исполнительного элемента или входа для сенсорного элемента. Она соединяется с корпусом 51 при использовании деформируемого механического соединения 55. Гибкие электрические соединения 56 с электродными слоями 10, 12 получают через отверстия со сквозным проходом, которые ведут в полость 50.
Возможным является избегание появления любого соединения между различными модулями в стопке в результате простого заключения их в сэндвичевую конструкцию между основанием выемки 50 и крышкой 54.
В зависимости от конструктивного исполнения и состояний поверхности исполнительных элементов трение между неплотно уложенными в стопку отдельными элементами может генерировать внутренние напряжения, которые уменьшают эффективную энергию, которая может быть передана, до нежелательного уровня.
Фигура 6 демонстрирует конструктивное исполнение, устраняющее данную проблему, в котором уменьшают трение между соседними исполнительными элементами. Между каждыми соседними парами исполнительных элементов 30, 32, 34 имеется дополнительный слой для уменьшения трения 60. Это делает возможным уменьшение трения между соседними исполнительными элементами в стопке при одновременном обеспечении возможности использования обычных материалов для отдельных исполнительных элементов на основе полимера ЕАР.
Данный материал может представлять собой низкофрикционную фольгу, например, из полимера PTFE, другого фторполимера, текстиля, текучей среды, геля, пеноматериала, фольги с поверхностной текстурой или в общем случае любого сообразного материала.
Фигура 6 демонстрирует отсутствие физического соединения слоев 60 с соседними исполнительными элементами, но вместо этого формирование слоев 60 из отдельных слоев. Таким образом, относительное скольжение может иметь место на обеих сторонах слоя для уменьшения трения 60.
Слой для уменьшения трения вместо этого может быть связан с исполнительным элементом на основе электроактивного полимера на одной стороне, как это продемонстрировано на фигуре 7. Это означает то, что относительное скольжение имеет место на одной поверхности слоя для уменьшения трения.
Затем слой для уменьшения трения включает слой твердого материала, для того чтобы он мог бы быть связан с одним из исполнительных элементов. Данное связывание может быть произведено при использовании способа нанесения покрытия или ламинирования.
Данный слой твердого материала может, например, включать полимер PTFE, фторполимер, текстиль, текучую среду, гель, пеноматериал или фольгу.
В примере с фигуры 8 слой для уменьшения трения связан с исполнительными элементами на основе электроактивного полимера на каждой стороне. Затем слой для уменьшения трения включает эластичный слой или слой вязкого материала или слой, который иным образом сообразуется со слоями на противоположных сторонах. Опять-таки слой для уменьшения трения включает слой твердого материала, для того чтобы он мог бы быть связан с двумя исполнительными элементами, например, при использовании способа нанесения покрытия или ламинирования.
Данным образом стопка может быть связана воедино (что может, например, позволить избежать возникновения потребности в дополнительной механической связи), но слой для уменьшения трения делает возможным относительное скольжение между его противоположными лицевыми поверхностями (то есть, противоположными в направлении укладывания в стопки). Таким образом, становится возможным сдвиг в материале слоя для уменьшения трения, так что противоположные стороны могут локально сообразовываться с формой и боковым расположением исполнительного элемента на каждой стороне.
В еще одной компоновке, как это продемонстрировано на фигуре 9, слой для уменьшения трения включает распорную конструкцию 80. Это обеспечивает наличие набора дистанционных ограничителей на площади исполнительного элемента. Это позволяет избегать наличия контакта между исполнительными элементами на большей части их площади. Распорная конструкция включает дистанционные ограничители, которые располагают во избежание появления контакта и для обеспечения возможности относительного скольжения. Механическая связь или ограждение в соответствии с представленным выше обсуждением фиксируют относительные позиции в направлении укладывания в стопку, но делают возможным относительное перемещение в направлении в плоскости.
В соответствии с представленным выше описанием изобретения может быть использована механическая связь, которая не фиксирует относительные позиции в плоскости (помимо необязательной одной точки привязки). Это представляет особенный интерес для утолщенных стопок или для предусматриваемых больших смещений. Таким образом, может быть использовано геометрическое соединение, а не жесткое физическое зажимание или склеивание.
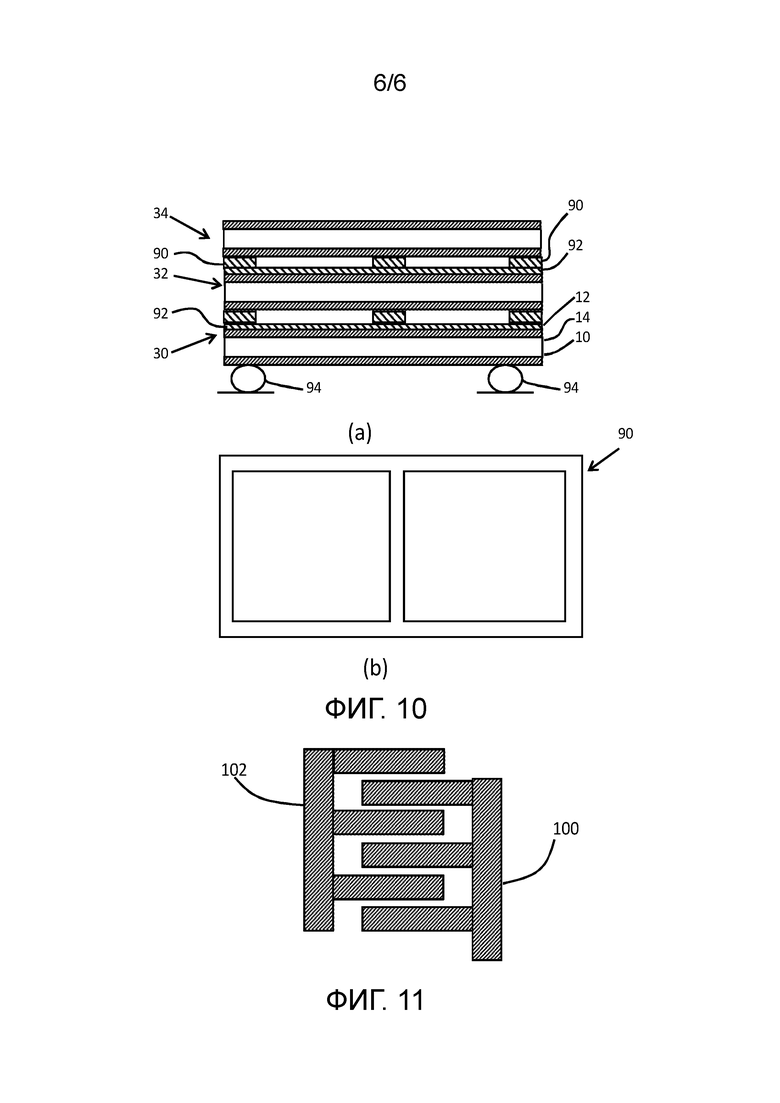
Фигура 10 демонстрирует компоновку, в которой функцию распорной конструкции исполняет рама 90, как это продемонстрировано на фигуре 10(b). Раму прикрепляют к одному исполнительному элементу при использовании клейкой стопки 92, для того чтобы относительное скольжение имело бы место между рамой 90 и другим исполнительным элементом, с которым она находится в контакте.
Фигура 10 также демонстрирует опоры 94, которые используют для ограничения изгибания (известным образом).
Все другие представленные выше примеры будут включать точки фиксации, такие как опоры 94, к внешней раме или конструкции, которые исполняют функцию точек привязки.
Представленные выше примеры имеют в своей основе стопку трех исполнительных элементов на основе полимера ЕАР. В стопке может иметься всего лишь два исполнительных элемента, но могло бы иметься и целых десять исполнительных элементов.
Таким образом, в стопке может иметься, например, от 2 до 10 исполнительных элементов. Каждый исполнительный элемент может включать один слой полимера ЕАР, но каждый также может включать и свою собственную ламинатную конструкцию из множества слоев полимера ЕАР.
В представленных выше примерах используют слой электроактивного полимера, для которого срабатывание приводит к его расширению, и затем это преобразуется в изгибающее перемещение.
Компоновка электродов может включать электроды на противоположных лицевых поверхностях слоя электроактивного полимера, как это продемонстрировано выше. Они обеспечивают получение поперечного электрического поля для регулирования толщины слоя полимера ЕАР. Это, в свою очередь, вызывает расширение или сокращение слоя полимера ЕАР в плоскости слоя.
Вместо этого компоновка электродов может включать пару гребенчатых электродов на одной лицевой поверхности слоя электроактивного полимера. Это обеспечивает наличие электрического поля в плоскости для непосредственного управления размерами слоя в плоскости. Это опять-таки может быть использовано для индуцирования изгибания. Также может быть использована и описанная выше стопочная конструкция. Фигура 10 демонстрирует пару перемежающихся гребенчатых электродов 100, 102, которые могут быть нанесены только на одну сторону слоя полимера ЕАР каждого исполнительного элемента.
Как это упоминалось выше, так же самая конструкция может быть использована и в качестве сенсорного элемента. Индуцированное извне изгибание генерирует изменение электрического поля, что в результате приводит к получению измеряемых сигналов на электродах.
Отдельные модули в стопке могут, например, иметь размеры 10 мм × 10 мм × 0,5 мм. Один типичный и неограничивающий диапазон размеров может быть заключен в пределах от 50 мм × 50 мм × 2 мм до 2 мм × 2 мм × 0,1 мм.
Материалы, подходящие для использования в слое полимера ЕАР, известны. Электроактивные полимеры включают следующие далее подклассы, но не ограничиваются только этим: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные ферроэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает нижеследующее, но не ограничивается только этим:
поливинилиденфторид (PVDF), поли(винилиденфторид-трифторэтилен) (PVDF-TrFE), поли(винилиденфторид-трифторэтилен-хлортрифторэтилен) (PVDF-TrFE-CFE), поли(винилиденфторид-трифторэтилен-хлортрифторэтилен) (PVDF-TrFE-CTFE), поли(винилиденфторид-гексафторпропилен) (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает нижеследующее, но не ограничивается только этим:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает нижеследующее, но не ограничивается только этим:
полипиррол, поли-3,4-этилендиокситиофен, поли(п-фениленсульфид), полианилины.
Для оказания воздействия на поведение слоя полимера ЕАР в ответ на приложенное электрическое поле может быть предусмотрено наличие и дополнительных пассивных слоев.
Слой полимера ЕАР может быть заключен в сэндвичевую конструкцию между электродами. Электроды могут быть растяжимыми, для того чтобы они могли бы следовать деформации слоя материала полимера ЕАР. Материалы, подходящие для использования в электродах, также известны и могут, например, быть выбраны из группы, состоящей из тонких металлических пленок, таких как в случае золота, меди или алюминия, или органических проводников, таких как технический углерод, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)-поли(стиролсульфонат) (PEDOT:PSS). Также могут быть использованы и пленки металлизированных сложных полиэфиров, такие как в случае металлизированного полиэтилентерефталата (РЕТ), например, при использовании алюминиевого покрытия.
Материалы для различных слоев будут выбираться, например, при принятии во внимание модулей упругости (модулей Юнга) различных слоев.
Для адаптирования электрического или механического поведения устройства могут быть использованы и слои, дополнительные к слоям, обсуждавшимся выше, такие как дополнительные полимерные слои.
Устройства на основе полимера ЕАР могут быть устройствами с приведением в действие электрическим полем или ионными устройствами. Ионные устройства могут иметь в своей основе ионные полимер-металлические композиты (IPMC) или сопряженные полимеры. Ионный полимер-металлический композит (IPMC) представляет собой синтетический композитный наноматериал, который обнаруживает поведение искусственной мышцы при приложенных разности потенциалов или электрическом поле.
Композиты IPMC образованы из ионного полимера, подобного продуктам Nafion или Flemion, на поверхности которых при использовании химического или физического способов наносят покрытие из проводников, таких как платина или золото, или электродов на углеродной основе. При приложенной разности потенциалов миграция и перераспределение ионов вследствие приложенной разности потенциалов к полоске композитов IPMC в результате приводят к получению изгибной деформации. Полимер представляет собой набухшую в растворителе ионообменную полимерную мембрану. Поле вызывает передвижение катионов в сторону катода совместно с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация на площади катода приводит к появлению напряжения в остальной полимерной матрице, что в результате вызывает появление изгибания в направлении анода. Изменение знака у приложенной разности потенциалов приводит к обращению изгибания.
В случае компоновки электродов с нанесенным покрытием в несимметричной конфигурации приложенная разность потенциалов может индуцировать появление всех типов деформаций, такие как скручивание, сворачивание, закручивание, выворачивание и деформация несимметричного изгибания.
Устройство может быть использовано в качестве одного исполнительного элемента, или же могут иметь место линия или массив устройств, например, для обеспечения управления в двумерном или трехмерном контуре.
Изобретение может быть использовано во множестве областей применения полимеров ЕАР, включая примеры, в которых интерес представляет пассивная матрица исполнительных элементов.
Во множестве областей применения основная функция продукта базируется на (локальном) манипулировании человеческой тканью или на срабатывании интерфейсов, находящихся в контакте с тканью. В таких областях применения исполнительные элементы на основе полимера ЕАР обеспечивают получение уникальных преимуществ в основном вследствие небольшого геометрического структурного фактора, гибкости и высокой плотности энергии. Таким образом, полимеры ЕАР легко могут быть интегрированы в мягкие трехмерные и/или миниатюрные продукты и интерфейсы. Примерами таких областей применения являются:
Разновидности косметического ухода за кожей, такие как в случае исполнительных устройств для кожи в форме кожных пластырей на основе полимера ЕАР, которые воздействуют на кожу постоянным или циклическим растяжением в целях натяжения кожи или уменьшения морщин;
Дыхательные устройства с маской интерфейса пациента, которая имеет активные прокладку или уплотнение на основе полимера ЕАР для обеспечения воздействия на кожу переменным нормальным давлением, что уменьшает или предотвращает появление красных пятен на лице;
Электрические бритвы, имеющие адаптивную бритвенную головку. Высота поверхностей, находящихся в контакте с кожей, может быть подстроена при использовании исполнительных элементов на основе полимера ЕАР в целях оказания воздействия на баланс между близостью и раздражением;
Устройства для очищения ротовой полости, такие как пневматический ирригатор, имеющий динамический исполнительный элемент для сопла в целях улучшения достижения распыления, в особенности в пространствах между зубами. В альтернативном варианте, могут быть предусмотрены зубные щетки, имеющие активированные щетинки;
Электронные устройства или сенсорные панели широкого потребления, которые обеспечивают наличие локальной тактильной обратной связи через массив элементов на основе полимера ЕАР, которые интегрированы в пользовательский интерфейс или поблизости от него;
Катетеры, имеющие управляемый кончик, для обеспечения возможности легкой навигации в извилистых кровеносных сосудах.
Еще одна категория уместной области применения, которая пользуется преимуществами исполнительных элементов на основе полимера ЕАР, относится к модифицированию света. Оптические элементы, такие как линзы, отражающие поверхности, дифракционные решетки и тому подобное, могут быть сделаны адаптивными в результате адаптирования формы или позиции при использовании исполнительных элементов на основе полимера ЕАР. В данном случае преимущества полимеров ЕАР, например, заключаются в уменьшенном потреблении мощности.
Исходя из исследования чертежей, раскрытия изобретения и прилагающейся формулы изобретения специалистами в соответствующей области техники при реализации заявленного изобретения на практике могут быть поняты и осуществлены и другие вариации раскрытых вариантов осуществления. В формуле изобретения слово «включающий» не исключает других элементов или стадий, а неопределенные термины «один» или «некий» не исключают множественности. Простой факт упоминания определенных мер во взаимно различающихся зависимых пунктах формулы изобретения не указывает на невозможность использования с выгодой и комбинации из данных мер. Любые ссылочные позиции в формуле изобретения не должны восприниматься в качестве ограничения ее объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2754722C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ТРЕНИЕМ | 2017 |
|
RU2740346C2 |
| ПЕРЕКЛЮЧАТЕЛЬ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ИЛИ ФОТОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2716841C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОГО И/ИЛИ РАДИАЦИОННОГО СИГНАЛА В ПЕРЕМЕЩЕНИЕ ИЛИ НАОБОРОТ | 2016 |
|
RU2727067C2 |
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| ДВУНАПРАВЛЕННЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2016 |
|
RU2711243C2 |
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2011 |
|
RU2589245C2 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО И АКУСТИЧЕСКИЙ КОМПОНЕНТ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТАКОМ УСТРОЙСТВЕ | 2017 |
|
RU2756022C2 |
| УПРАВЛЕНИЕ ЖЕСТКОСТЬЮ ДЛЯ ЭЛЕКТРОАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2748051C2 |
Использование: для создания исполнительного или сенсорного устройства для восприятия изгибания. Сущность изобретения заключается в том, что изгибающееся исполнительное устройство или сенсорное устройство для восприятия изгибания включают в себя: стопку модулей, при этом каждый модуль включает в себя по меньшей мере один электроактивный полимер и управляющие электроды для приведения в действие указанного по меньшей мере одного электроактивного полимера, так чтобы он деформировался в ответ на сигнал приведения в действие, поданный на электроды для приведения в действие, или для восприятия сигнала, генерируемого в ответ на деформирование указанного по меньшей мере одного электроактивного полимера, причем соседние модули в стопке обладают способностью скольжения относительно друг друга. Технический результат: обеспечение возможности увеличения усилия при срабатывании без увеличения разности потенциалов для приведения в действие. 14 з.п. ф-лы, 11 ил.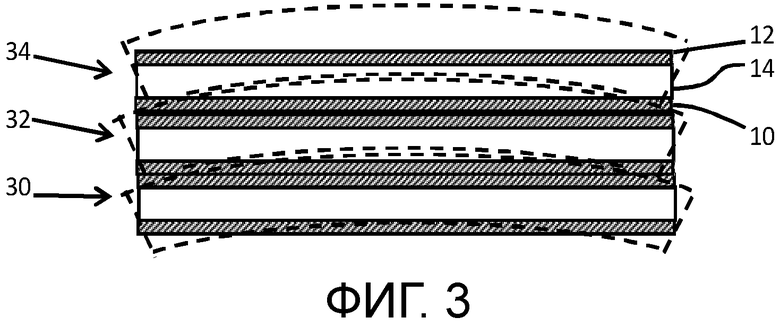
1. Изгибающееся исполнительное устройство или сенсорное устройство для восприятия изгибания, включающее в себя:
стопку модулей (30, 32, 34), при этом каждый модуль включает в себя по меньшей мере один электроактивный полимер (14) и управляющие электроды (10, 12) для приведения в действие указанного по меньшей мере одного электроактивного полимера, так чтобы он деформировался в ответ на сигнал приведения в действие, поданный на электроды для приведения в действие, или для восприятия сигнала, генерируемого в ответ на деформирование указанного по меньшей мере одного электроактивного полимера,
причем соседние модули в стопке обладают способностью скольжения относительно друг друга.
2. Устройство по п. 1, в котором модули уложены в стопку, причем соседние модули находятся во фрикционном контакте друг с другом.
3. Устройство по п. 2, в котором каждый модуль включает в себя электроды на противоположных сторонах электроактивного полимера, причем электроды выполнены из слоя низкофрикционного, эластичного или вязкого материала.
4. Устройство по п. 1, дополнительно содержащее слой (50) для уменьшения трения между каждыми соседними парами модулей.
5. Устройство по п. 4, в котором слой для уменьшения трения выполнен отдельным или связан с модулем на одной стороне.
6. Устройство по п. 4 или 5, в котором слой для уменьшения трения включает в себя слой твердого материала.
7. Устройство по п. 6, в котором слой твердого материала включает в себя политетрафторэтилен (PTFE), фторполимер, текстиль, текучую среду, гель, пеноматериал или фольгу.
8. Устройство по п. 4, в котором слой для уменьшения трения связан с модулями на каждой стороне и слой для уменьшения трения включает в себя эластичный слой или слой вязкого материала.
9. Устройство по п. 4, в котором слой для уменьшения трения включает в себя распорную конструкцию.
10. Устройство по любому предшествующему пункту, включающее механическую связь между модулями, которая фиксирует относительные позиции в направлении укладывания в стопку, но делает возможным относительное перемещение в направлении в плоскости.
11. Устройство по любому одному из пп. 1-9, дополнительно включающее держатель для задания расположения в плоскости для стопки.
12. Устройство по п. 11, в котором держатель включает корпус, имеющий выемку, в которой расположена стопка модулей.
13. Устройство по п. 12, включающее в себя крышку поверх стопки модулей, которая формирует интерфейс на входе или на выходе для устройства.
14. Устройство по п. 13, в котором стопка модулей заключена в сэндвичевую конструкцию между основанием выемки и крышкой при отсутствии физического соединения между модулями стопки.
15. Устройство по любому предшествующему пункту, включающее изгибающийся исполнительный элемент.
| US 20130117980 A1, 16.05.2013 | |||
| US 20120080980 A1, 05.04.2012 | |||
| СПОСОБ УКРЕПЛЕНИЯ ЗДОРОВЬЯ ЧЕЛОВЕКА | 2004 |
|
RU2264801C1 |
| EP 1919072 B1, 25.07.2012 | |||
| US 20060232166 A1, 19.10.2006. | |||

