Настоящее изобретение относится к усиленному высокочастотными ударами вращательному бурению и, в частности, к резонансно-усиленному бурению (RED). В вариантах осуществления изобретения предложено приспособление для преобразования вращения в линейное перемещение, исполнительный механизм (например, линейный исполнительный механизм) включающий в себя такое приспособление, а также устройство и способы резонансно-усиленного вращательного бурения, включающие в себя и применяющие такое приспособление для улучшения показателей бурения. В дополнительных вариантах осуществления данного изобретения предложено оборудование резонансно-усиленного бурения, которым можно управлять данными способами и устройством. Конкретные варианты осуществления изобретения применимы для бурильного инструмента любого размера или любого материала, подлежащего бурению. Некоторые более конкретные варианты осуществления предназначены для бурения пластов горной породы, отличающихся меняющимся составом, с которыми можно столкнуться в вариантах глубокого бурения в добыче нефти и газа, горных разработках и строительстве.
Усиленное ударами вращательное бурение само по себе известно. Бурильный инструмент для усиленного ударами вращательного бурения содержит долото вращательного бурения и исполнительный механизм или генератор колебаний для приложения ударной нагрузки на долото вращательного бурения с низкой частотой и с ограниченным регулированием силы удара. Исполнительный механизм обеспечивает ударные силы на материале, в котором осуществляют бурение, для его раскалывания, что помогает буровому долоту вращательного бурения в проходке материала.
Резонансно-усиленное вращательное бурение является усиленным ударами вращательным бурением специального типа, в котором колебания генерируются с резонансом и высокой частотой для увеличения скорости проходки материала, в котором осуществляют бурение. Указанное приводит к усилению динамического напряжения, создаваемого буровым долотом вращательного бурения и, таким образом, к увеличению эффективности бурения в сравнении со стандартным ударно-вращательным бурением.
Патент US 3,990,522 раскрывает бур ударно-вращательного бурения, в котором применен гидравлический ударник, смонтированный в инструменте вращательного бурения, для бурения шпуров анкерной крепи. Раскрыта возможность применения ударного цикла с изменяемым ходом и частотой с их регулированием по собственной частоте материала, в котором осуществляют бурение, для получения усиления давления, производимого на режущей кромке бурового долота. Управление ударным действием осуществляет сервоклапан, которым управляет оператор через электронный модуль управления, соединенный с сервоклапаном электрическим проводником. Оператор может избирательно изменять частоту ударного действия от 0 до 2500 циклов в минуту (т.e. от 0 до 42 Гц) и избирательно варьировать ход бурового долота от 0 до 1/8 дюйма (т.e. от 0 до 3,175 мм) посредством регулирования подачи текучей среды под давлением в исполнительный механизм и выпуска из него. Описано, что посредством выбора хода для удара с частотой равной собственной или резонансной частоте слоя горной породы, в котором осуществляют бурение, энергия, накапливаемая в пласте горной породы под действием ударных сил, должна давать увеличение давления, производимого режущей кромкой бурового долота, при этом твердый материал должен разрушаться и смещаться и обеспечивать скорости бурения в диапазоне от 3 до 4 футов (0,9-1,2 м) в минуту.
Имеются несколько проблем, которые идентифицированы для вышеупомянутого устройства и рассмотрены ниже.
Высокие частоты недостижимы при применении устройства по патенту US 3,990,522, где применен относительно низкочастотный гидравлический генератор колебаний. Соответственно, хотя в патенте US 3,990,522 рассмотрена возможность резонанса, низкие частоты, достижимые с помощью указанного генератора колебаний, недостаточны для получения улучшенной проходки во многих твердых материалах. Кроме того, не указано, что представляет собой генератор колебаний.
Вне зависимости от проблемы с частотой, рассмотренной выше, резонанс, в любом случае, непросто получить и поддерживать, применяя устройство по патенту US 3,990,522, в особенности, если бурильный инструмент проходит через отличающиеся материалы с отличающимися резонансными характеристиками. Причиной здесь является ручное регулирование оператором частоты и хода при ударах в устройстве по патенту US 3,990,522. Поэтому трудно управлять устройством с непрерывной корректировкой частоты и хода при действии ударных сил для поддержания резонанса, когда бурильный инструмент проходит через материалы отличающихся типов. Данное может не создавать серьезной проблемы в бурении неглубоких шпуров анкерной крепи, как описано в патенте US 3,990,522. Оператор может просто выбирать подходящую частоту и ход для материала, в котором шпур анкерной крепи подлежит бурению, и затем применять бурильный инструмент. Вместе с тем, проблема усугубляется для глубокого бурения через много отличающихся слоев горной породы. Оператор, находящийся сверху скважины глубокого бурения, не может видеть типа горной породы, бурение которой осуществляется, и не может быстро получить и поддерживать резонанс, когда бурильный инструмент переходит от горной породы одного типа к породе другого типа, в особенности в зонах, где типы горной породы часто меняются.
Некоторые из вышеупомянутых проблем решены изобретателем, как описано в публикации WO 2007/141550. Публикация WO 2007/141550 описывает инструмент резонансно-усиленного вращательного бурения, содержащий автоматизированный механизм управления с обратной связью, который может непрерывно регулировать частоту и ход для ударных сил для поддержания резонанса, когда бурильный инструмент выполняет проходку в горных породах отличающегося типа. Бурильный инструмент обеспечен средством регулирования, которое реагирует на свойства материала, проходку которого выполняет бурильный инструмент, и средством управления на забое в скважине, которое включает в себя датчики для проведения измерений характеристик материала на забое скважины, при этом устройство способно функционировать на забое в скважине с управлением в режиме реального времени с обратной связью.
В патенте US2006/0157280 предложено управление генератором колебаний на забое в скважине по замкнутому контуру в режиме реального времени с обратной связью. Описано, что датчики и блок управления могут вначале зондировать диапазон частот в процессе мониторинга ключевого параметра эффективности бурения, такого как скорость продвижения (ROP). Вибрационное устройство можно затем отрегулировать для обеспечения колебаний оптимальной частоты до проведения следующего зондирования частоты. Схема зондирования частоты может быть основана на одном или более элементах проводки скважины, таких как изменение в пласте, изменение в измеренном ROP, заданный период времени или инструкции с поверхности. В детально описанном варианте осуществления применено колебательное приспособление, которое передает торсионные колебания на долото вращательного бурения с привязкой к торсионному резонансу. Вместе с тем, дополнительно описано, что являющиеся примером направления колебаний, передаваемых на буровое долото, включают в себя колебания по всем степеням свободы и не используются для инициирования трещин в материале, подлежащем бурению. Описано, что вместо этого вращение бурового долота вызывает начальное дробление материала, подлежащего бурению, и затем кратковременные колебания передаются для обеспечения сохранения контакта вращающегося бурового долота с дробящимся материалом. В патенте нет раскрытия или предложения по исполнительному механизму или генератору колебаний, который может производить достаточно высокую аксиальную вибрационную нагрузку на буровое долото для инициирования трещин в материале, через который осуществляет проходку долото вращательного бурения, как того требует резонансно-усиленное бурение, описанное в заявке WO 2007/141550.
Никакая существующая техника не обеспечивает деталей способа мониторинга аксиальных колебаний. В общем, в материалах US2006/0157280 и WO 2007/141550 раскрыты датчики, но позиции датчиков относительно компонентов, таких как виброизоляционный блок и передающий вибрацию блок, не рассмотрены.
Кроме решений, описанных в существующей технике, требуются дополнительные улучшения описанных способов и устройств. Целью вариантов осуществления настоящего изобретения является выполнение таких улучшений для увеличения эффективности бурения, увеличения скорости бурения, а также стабильности и качества ствола скважины, с ограничением эксплуатационного износа устройства для увеличения его эксплуатационного ресурса. Дополнительно, целью является более точное управление резонансно-усиленным бурением, в особенности, при бурении через горные породы быстро меняющихся типов.
В частности, настоящее изобретение сфокусировано на улучшении механического исполнительного механизма для преобразования вращения в колебания вдоль оси вращения. Такое колебательное аксиальное движение является существенным признаком резонансно-усиленного бурения. Существующая техника по публикации WO 2007/141550, в частности, задействует исполнительные механизмы различных типов, которые не являются исполнительными механизмами, разработанными для резонансно-усиленного бурения, но "серийно производимыми" компонентами. При соответствии поставленной цели, указанное не является идеальным, и остается потребность в создании улучшенного исполнительного механизма, специально разработанного для резонансно-усиленного бурения.
В предыдущих патентных заявках изобретателя описаны модули резонансно-усиленного бурения (RED), содержащие "серийно производимые" исполнительные механизмы, например в публикации WO 2012/076401. Вместе с тем, в технике, нет информации по конструктивному решению исполнительного механизма, специально приспособленного для резонансно-усиленного бурения (RED).
Целью настоящего изобретения является решение проблем существующей техники, описанных выше. В частности, целью настоящего изобретения является обеспечение устройства для преобразования вращения в колебательное аксиальное движение, данное устройство может применяться в исполнительном механизме (линейном исполнительном механизме) для резонансно-усиленного бурения. Также целью является обеспечение устройства для резонансно-усиленного бурения, содержащего приспособление и исполнительный механизм изобретения, а также способов бурения с применением приспособления и исполнительного механизма изобретения.
Соответственно, настоящее изобретение обеспечивает приспособление для преобразования вращения в колебательное аксиальное движение, указанное приспособление содержит:
(a) вращающийся элемент (1);
(b) базовый элемент (2); и
(c) один или более подшипников (3) для обеспечения вращения вращающегося элемента относительно базового элемента;
при этом вращающийся элемент и/или базовый элемент содержат один или более поднятых участков (4) и/или один или более опущенных участков (5), по которым проходят один или более подшипников (3) для периодического увеличения и уменьшения аксиального расстояния между вращающимся элементом (1) и базовым элементом (2), когда происходит вращение, при этом вращающемуся элементу (1) придается колебательное аксиальное движение относительно базового элемента (2).
В настоящем контексте аксиальное перемещение относится к компоненту движения параллельно оси вращения. Обычно вращение обеспечивается движением вращательного бурения в контексте резонансно-усиленного бурения.
Предусмотрено, что данное приспособление можно использовать в исполнительном механизме, который можно в свою очередь использовать в модуле резонансно-усиленного бурения в бурильной колонне. Конфигурация бурильной колонны не имеет специальных ограничений, и любая конфигурация может быть предусмотрена, в том числе, известные конфигурации. Модуль можно включать или выключать по требованию для резонансного усиления.
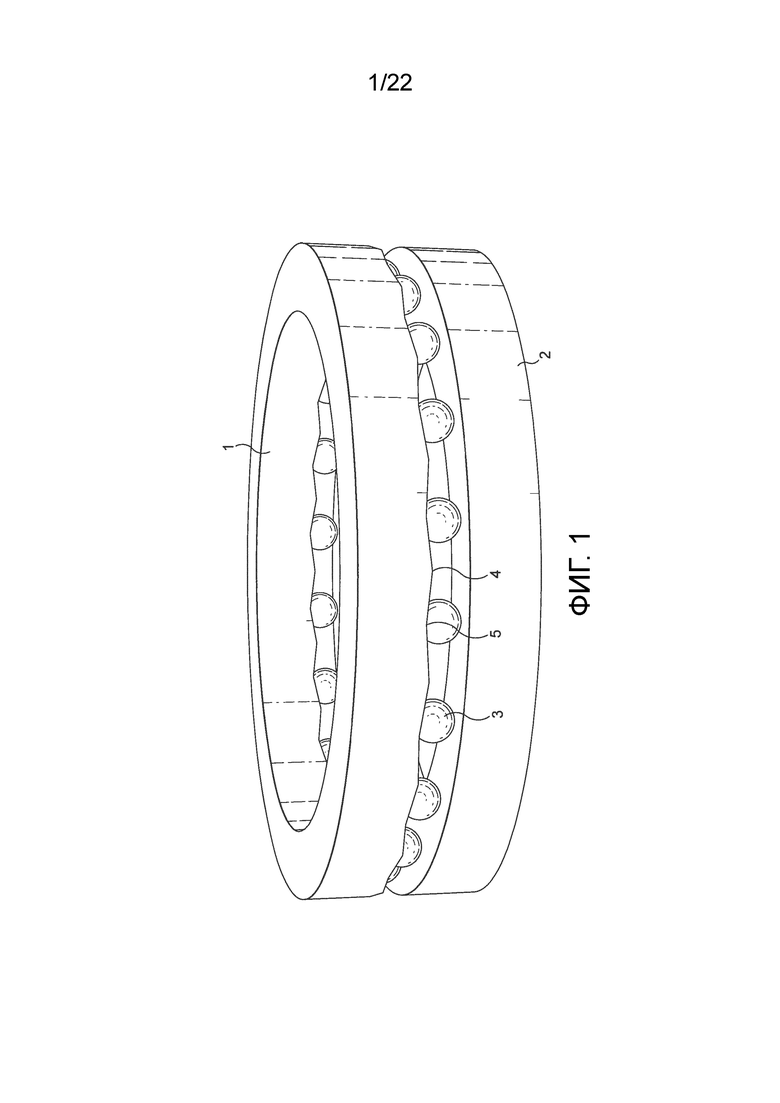
Один или более подшипников, используемых в приспособлении, не имеют специальных ограничений при условии, что они служат для обеспечения вращения вращающегося элемента относительно базового элемента. Обычно подшипники, взаимодействующие с вращающимся и базовым элементами для придания колебательного аксиального движения, не передают крутящий момент при вращении. Предпочтительно, один или более подшипников можно выбрать из следующего: подшипник с текучей средой (такой как гидравлический подшипник (жидкость) или пневматический подшипник (газ), подшипник скольжения, подшипник качения (такой как шарикоподшипники и/или роликоподшипники и/или подшипники с бочкообразными роликами), магнитный подшипник, подшипник из полудрагоценных камней и шарнирный подшипник. В приложении для бурения скважин, предпочтительно применяются подшипники качения. На фиг. 1 показан вариант осуществления с использованием шарикоподшипников (3).
Поднятые и/или опущенные участки выполнены с возможностью взаимодействия с одним или более подшипниками для преобразования вращения в колебательное аксиальное движение. Форма поднятых или опущенных участков не имеет специальных ограничений при условии выполнения указанной функции.
В одном варианте осуществления поднятые и/или опущенные участки присутствуют только на одном из элементов (либо вращающемся элементе или базовом элементе), а другой элемент не имеет поднятых или опущенных участков (т.e. является обычно планарным или плоским). При этом, аксиальное расстояние между элементами может меняться, когда происходит вращение. В данном варианте осуществления амплитуда колебаний, обеспечиваемая приспособлением, зависит от перепада между поднятыми и/или опущенными участками, измеренного в аксиальном направлении.
В предпочтительном варианте осуществления поднятые и/или опущенные участки могут быть выполнены на обоих элементах (обоих, вращающемся элементе и базовом элементе). В данном варианте осуществления амплитуда колебаний, обеспечиваемая приспособлением, зависит от суммарного перепада между поднятыми и/или опущенными участками, измеренного в аксиальном направлении.
Роликоподшипники являются предпочтительными, поскольку уменьшают или исключают проскальзывание между поверхностями подшипника и вращающегося элемента и базовым элементом, и при этом, предпочтительно, минимизируют трение между подшипником и вращающимся элементом и базовым элементом.
Таким образом, поднятые или опущенные участки могут иметь вид углублений и/или выпуклостей, вставленных во вращающийся элемент и/или в базовый элемент. Обычно, но не исключительно, углубления и/или выпуклости могут иметь вид гребней (4) и впадина (5), проходящих радиально от оси вращения вращающегося элемента и/или базового элемента. Предпочтительно, поднятые и/или опущенные участки могут иметь вид регулярных, периодических изменений в толщине вращающегося элемента и/или базового элемента, для обеспечения регулярного, периодического аксиального перемещения. Предпочтительно, для уменьшения напряжения и улучшения эксплуатационного ресурса приспособления поднятые и/или опущенные участки могут иметь вид плавных изменений в толщине вращающегося элемента и/или базового элемента. Предпочтительно, поднятые или опущенные участки выполнены синусоидальной формы, проходящими по периметру окружности или в тангенциальном направлении. Поверхность (поверхности) вращающегося элемента и/или базового элемента может поэтому обеспечивать проход одного или более подшипников по ним с колебательным движением в аксиальном направлении синусоидальной или периодической формы по касательной/ окружности вращающегося элемента и/или базового элемента.
В некоторых вариантах осуществления поднятые и или опущенные участки могут иметь вид дорожки качения или канавки, вставленной во вращающийся элемент и/или в базовый элемент, при этом дорожка качения или канавка выполнена с возможностью удерживать один или более подшипников. В предпочтительном варианте осуществления, когда один или более подшипников являются одним или более шарикоподшипниками, дорожка качения или канавка может иметь тангенциальное сечение в форме дуги. В особенно предпочтительном варианте осуществления тангенциальное сечение имеет форму дуги окружности. Понятно, что когда тангенциальное сечение имеет форму дуги окружности, на виде вдоль оси, дорожка качения или канавка уменьшается по ширине и глубине на регулярных интервалах, при этом обеспечивая уменьшенную площадь сечения. В данном варианте осуществления канавка или дорожка качения, можно сказать, гармонически или периодически меняется по периметру окружности или в тангенциальном направлении на виде вдоль оси. Данные варианты осуществления уменьшают проскальзывание между поверхностями одного или более подшипников и вращающегося элемента и/или базового элемента.
Амплитуда колебаний, обеспечиваемая приспособлением, может иметь диапазон от 0,1 мм до 5 мм, предпочтительно, от 0,2 до 4 мм, более предпочтительно, от 0,4 до 3 мм, более предпочтительно, от 0,5 до 2 мм, более предпочтительно, от 0,7 мм до 1,5 мм и, более предпочтительно, от 0,8 мм до 1,2 мм. Предпочтительная амплитуда составляет 1 мм.
Вращающийся элемент и базовый элемент не имеют специальных ограничений, при условии, что функция средства не нарушается. Обычно вращающийся элемент и/или базовый элемент имеют вид диска или кольца, в которое вставлены поднятые и/или опущенные участки. Обычно, оба, вращающийся и базовый элементы имеют вид кольца, в которое вставлена дорожка качения или канавка с плавными "горбами и впадинами", образующими поднятые и опущенные участки (см. фиг. 1), в которой подшипники удерживаются для перемещения по ней.
В варианте осуществления приспособление дополнительно содержит пружину. Пружина может сжимать вместе вращающийся элемент и базовый элемент. Пружина может быть тороидальной со стенкой из проволочной спирали, предпочтительно, пустотелой металлической емкостью со стенкой из проволочной спирали. Пружина может, например, быть дисковой пружиной или тарельчатой пружиной.
В варианте осуществления, где применяются подшипники с элементами качения, блок дополнительно может содержать обойму. Обойму подшипника можно применять для обеспечения угловых положений каждого элемента качения относительно другого элемента без смещения.
Настоящее изобретение также обеспечивает исполнительный механизм для применения в модуле резонансно-усиленного бурения, содержащий приспособление, определенное выше.
Настоящее изобретение дополнительно обеспечивает устройство для применения в резонансно-усиленном вращательном бурении, указанное устройство содержит приспособление или исполнительный механизм, определенные выше.
Обычно устройство содержит:
(i) датчик для измерения статической нагрузки или для мониторинга прочности на сжатие материала, в котором осуществляют бурение;
(ii) виброизоляционный блок;
(iii) приспособление или исполнительный механизм, определенный выше, для приложения аксиальной колебательной нагрузки на долото вращательного бурения;
(iv) датчик для измерения динамической аксиальной нагрузки или для мониторинга прочности на сжатие материала, в котором осуществляют бурение;
(v) присоединительное устройство бурового долота; и
(vi) буровое долото,
при этом датчик (i) предпочтительно установлен выше виброизоляционного блока, и датчик (iv) предпочтительно установлен между приспособлением или исполнительным механизмом и присоединительным устройством (v) бурового долота, при этом датчики соединены с контроллером для обеспечения на забое в скважине управления приспособлением или исполнительным механизмом (iii) по замкнутому контуру с обратной связью в режиме реального времени.
Датчики не имеют специальных ограничений, при условии, что они способны выполнять требуемые измерения. В обычных вариантах осуществления датчик (i) и/или датчик (iv) может представлять собой датчик нагрузки.
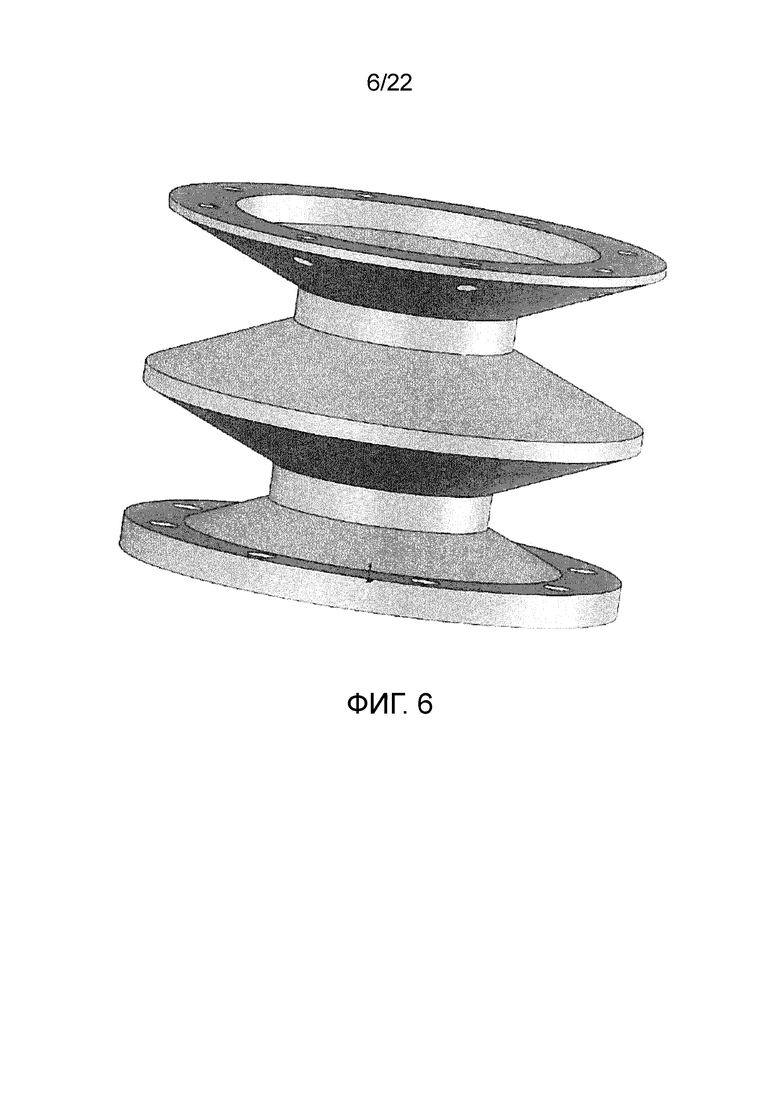
Обычно, устройство дополнительно содержит блок передачи вибрации между приспособлением или исполнительным механизмом (iii) и датчик (iv). Дополнительно, обычно виброизоляционный блок и/или блок передачи вибрации содержит конструктивную пружину. Конструктивная пружина может быть, например, тороидальным блоком со стенкой в виде спирали, предпочтительно, пустотелой металлической емкостью со стенкой в виде спирали. Конструктивная пружина может, например, быть дисковой пружиной или тарельчатой пружиной. В варианте осуществления блок передачи вибрации увеличивает амплитуду вибрации, обеспечиваемой приспособлением. В варианте осуществления блок передачи вибрации увеличивает амплитуду колебаний для обеспечения амплитуды в диапазоне от 0,5 до 10 мм, предпочтительно, от 1 до 10 мм, более предпочтительно, от 1 до 5 мм и, более предпочтительно, от 1 до 3 мм. Альтернативно, блок передачи вибрации увеличивает амплитуду колебаний для обеспечения амплитуды по меньшей мере 10 мм, предпочтительно, по меньшей мере 5 мм, более предпочтительно, по меньшей мере 3 мм или, более предпочтительно по меньшей мере 1 мм.
В данном устройстве позиционирование верхнего датчика (например, датчика нагрузки) обычно является таким, что можно измерить статическую аксиальную нагрузку от бурильной колонны. Положение нижнего датчика (например, датчика нагрузки) обычно является таким, что можно измерить динамическую нагрузку, проходящую от приспособления или исполнительного механизма через блок передачи вибрации на буровое долото. Предпочтительный порядок компонентов устройства данного варианта осуществления в частности установлен от (i) до (viii), как указано выше, сверху вниз.
Предусмотрено что данное устройство можно использовать, как модуль резонансно-усиленного бурения в бурильной колонне. Конфигурация бурильной колонны специально не ограниченна, и любую конфигурацию можно предусмотреть, в том числе, известные конфигурации. Модуль можно включать или выключать по требованию резонансного усиления бурения.
Устройство дает ряд преимуществ. В том числе: увеличенную скорость бурения; улучшенную стабильность и качество ствола скважины; уменьшенное напряжение на устройстве, приводящее к увеличению эксплуатационного ресурса; обеспечение колебаний с более высокой силой и/или частотой; улучшенную прочность, в частности при посредстве эксклюзивного применения механических компонентов в приспособлении; и более высокий кпд, уменьшающий стоимость энергии.
Предпочтительными вариантами применения являются крупное бурильное устройство, оборудование управления и способы бурения для нефтяной и газовой промышленности. Вместе с тем, в других вариантах бурения можно также получить выгоду, в том числе: в наземном буровом оборудовании, оборудовании управления и способах бурения для дорожного строительства; буровом оборудовании, оборудовании управления и способах бурения для горнодобывающей промышленности; портативном сверлильном оборудовании для домашнего применения и т.п.; специальном сверлении, например, для бормашин в стоматологии.
Изобретение описано ниже более подробно только в качестве примера, со ссылкой на фигуры, на которых показано следующее.
На фиг. 1 показано приспособление изобретения, включающее в себя вращающийся элемент (1), базовый элемент (2), один или более подшипников (3), поднятые участки (4) и опущенные участки (5).
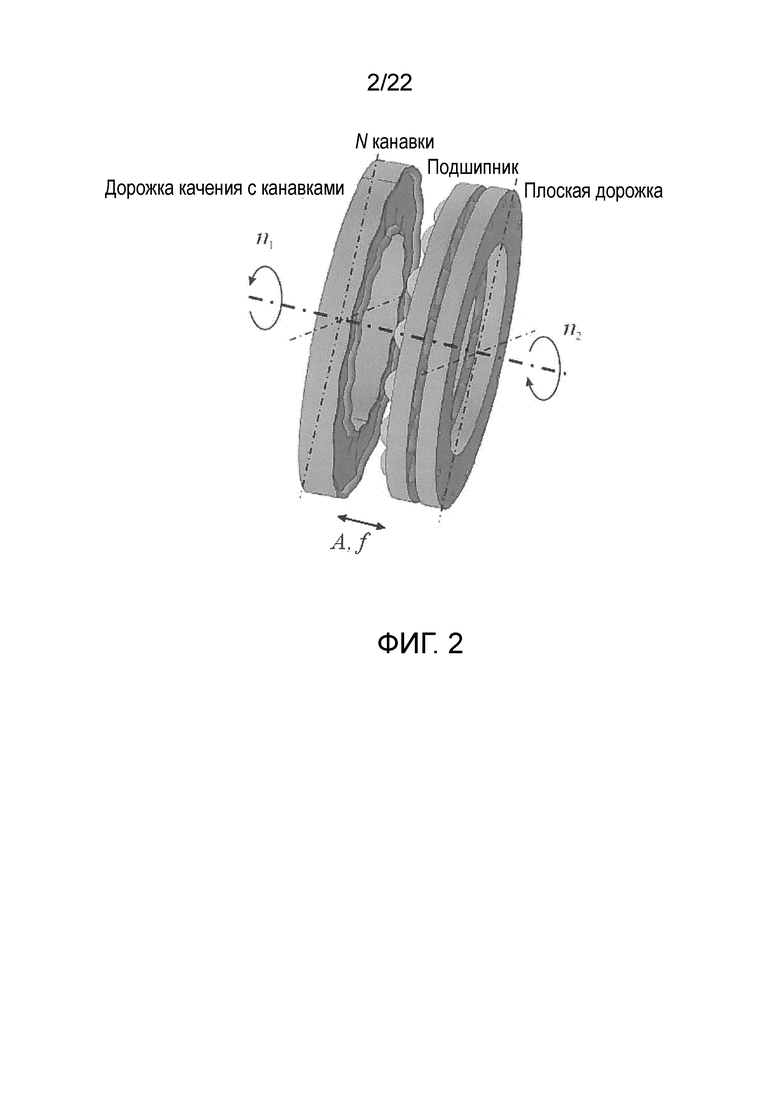
На фиг. 2 показан более детальный вид исполнительного механизма изобретения с поднятыми и опущенными участками, представленными как "дорожка качения с канавками", вставленная во вращающийся элемент, и плоским базовым элементом ("плоская дорожка качения").
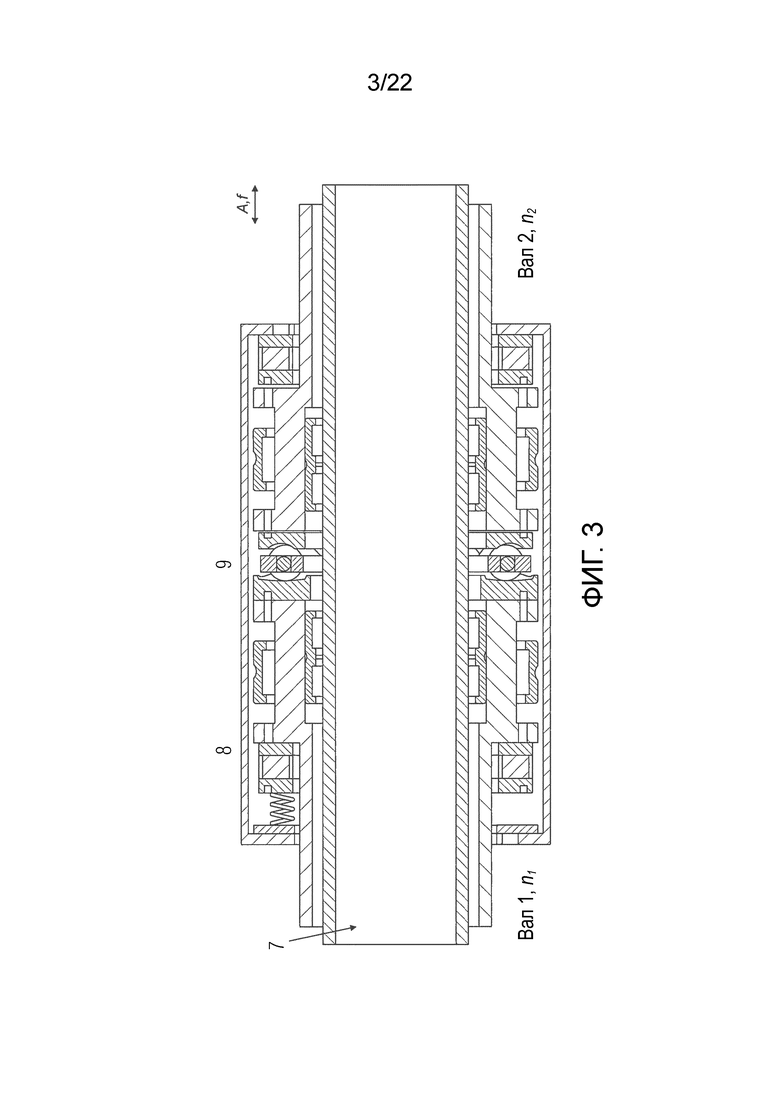
На фиг. 3 показан более детальный вид исполнительного механизма, включенного в состав бурильного модуля RED (резонансно-усиленного бурения), внутренняя труба (7).
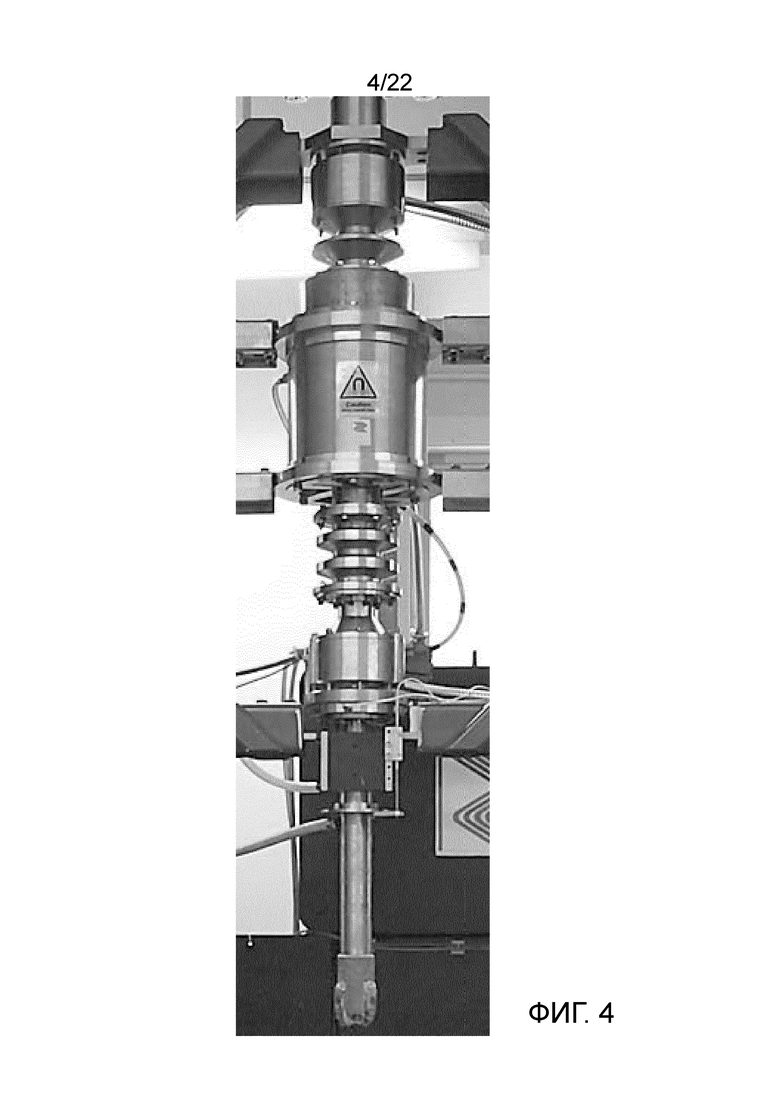
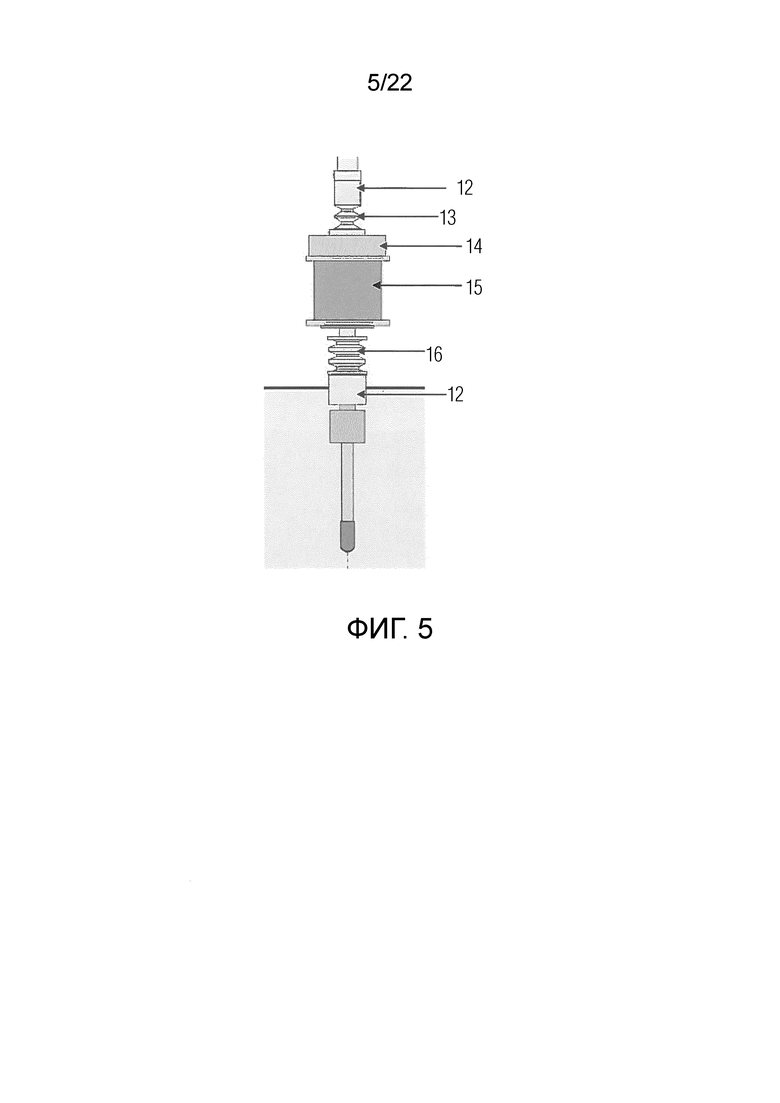
На фиг. 4 и фиг. 5 показаны фото и схема модуля резонансно-усиленного бурения (RED) согласно изобретению. На фиг. 5: датчик нагрузки (12); виброизоляционный блок (конструктивная пружина)(13);задняя масса приспособления или исполнительного механизма (14);приспособление для преобразования вращения в аксиальное колебательное движение (15); блок передачи вибрации (конструктивная пружина) (16)).
На фиг. 6 показана схема виброизоляционного блока, который можно применять в настоящем изобретении.
На фиг. 7 показана схема блока передачи вибрации, который можно применять в настоящем изобретении.
На фиг. 8(a) и (b) показаны графики, иллюстрирующие необходимую минимальную частоту, как функцию амплитуды колебаний для бурового долота диаметром 150 мм.
На фиг. 9 показан график, иллюстрирующий максимальную применимую частоту, как функцию амплитуды колебаний, для различных вибрационных масс при фиксированном электропитании.
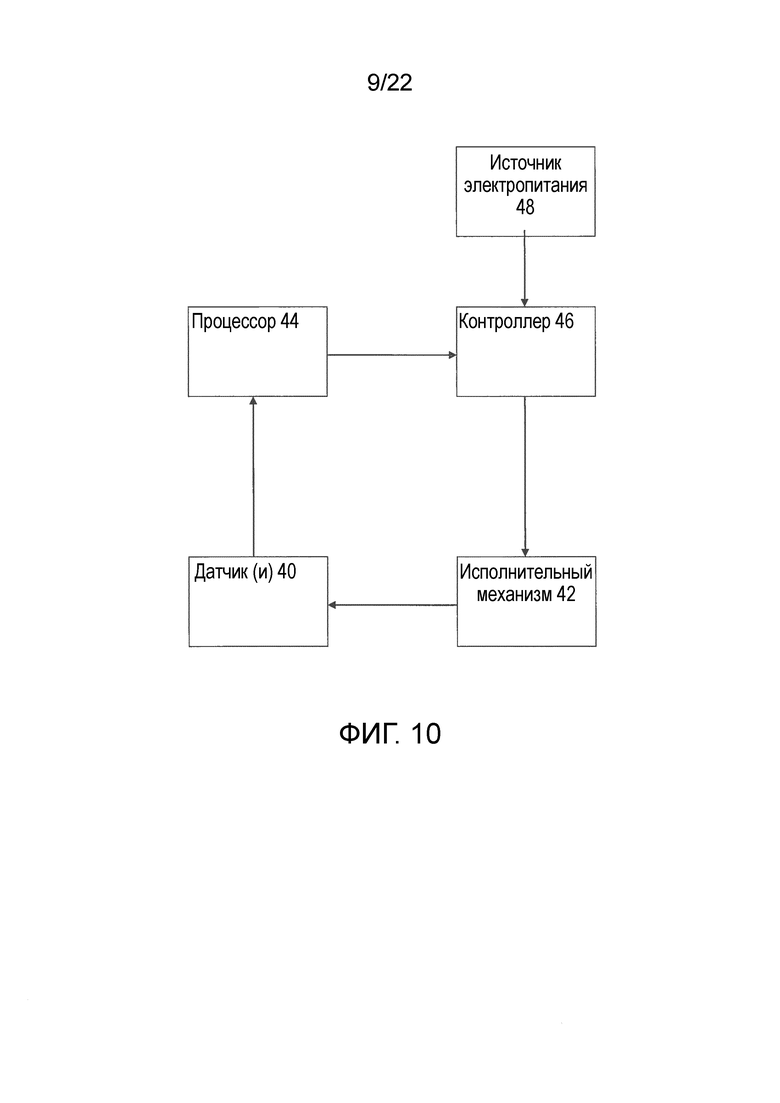
На фиг. 10 показана схема скважинного механизма с замкнутым контуром и обратной связью в режиме реального времени.
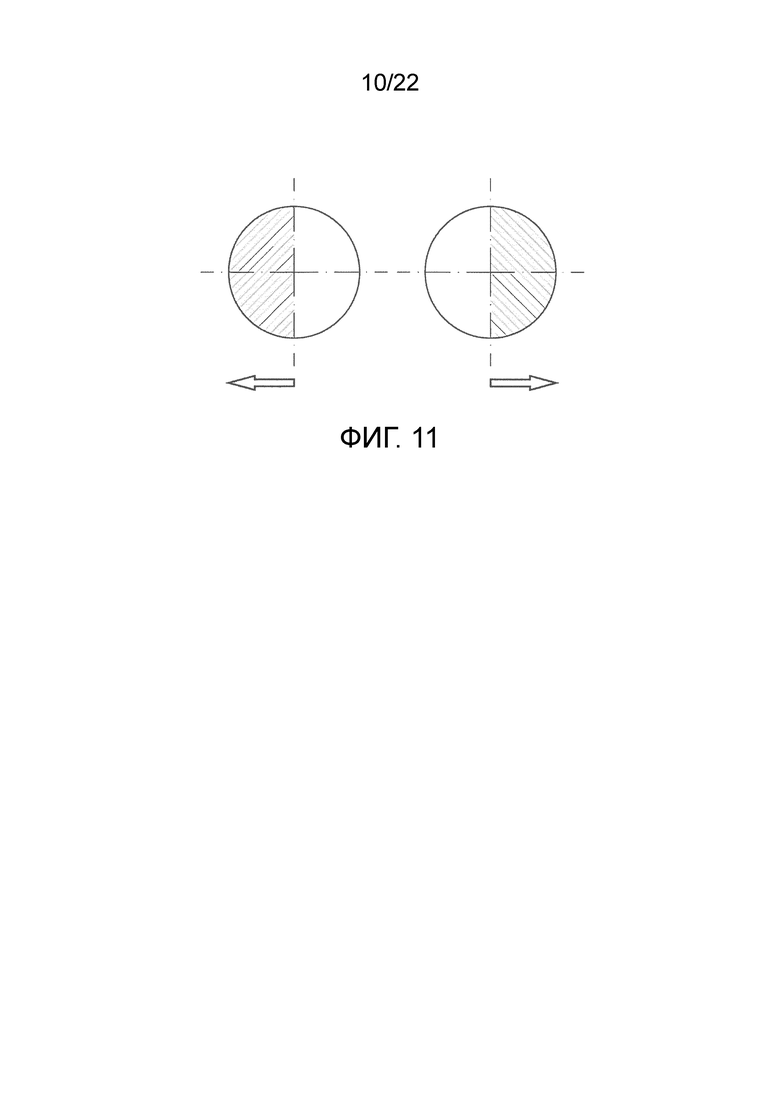
На фиг. 11 показаны зоны активирования для управления движением в отличающихся направлениях в аспекте наклонно-направленного бурения изобретения. Продольная сила от исполнительных механизмов управления направлением движения или предпочтительного бурения от вставок управления направлением движения должна обеспечивать предпочтительное бурение одной стороны зоны бурения.
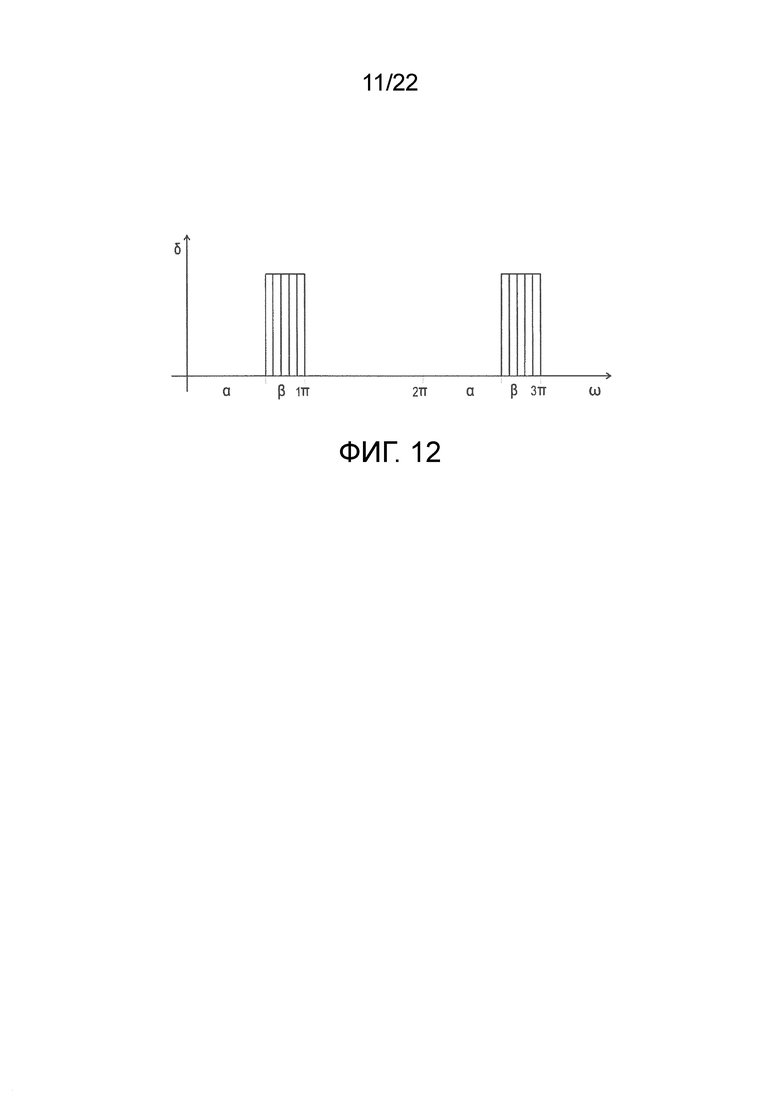
На фиг. 12 показан электронный импульс активирования, который может быть послан на вставку управления направлением движения для управления удлинением вставки при требуемом угле поворота.
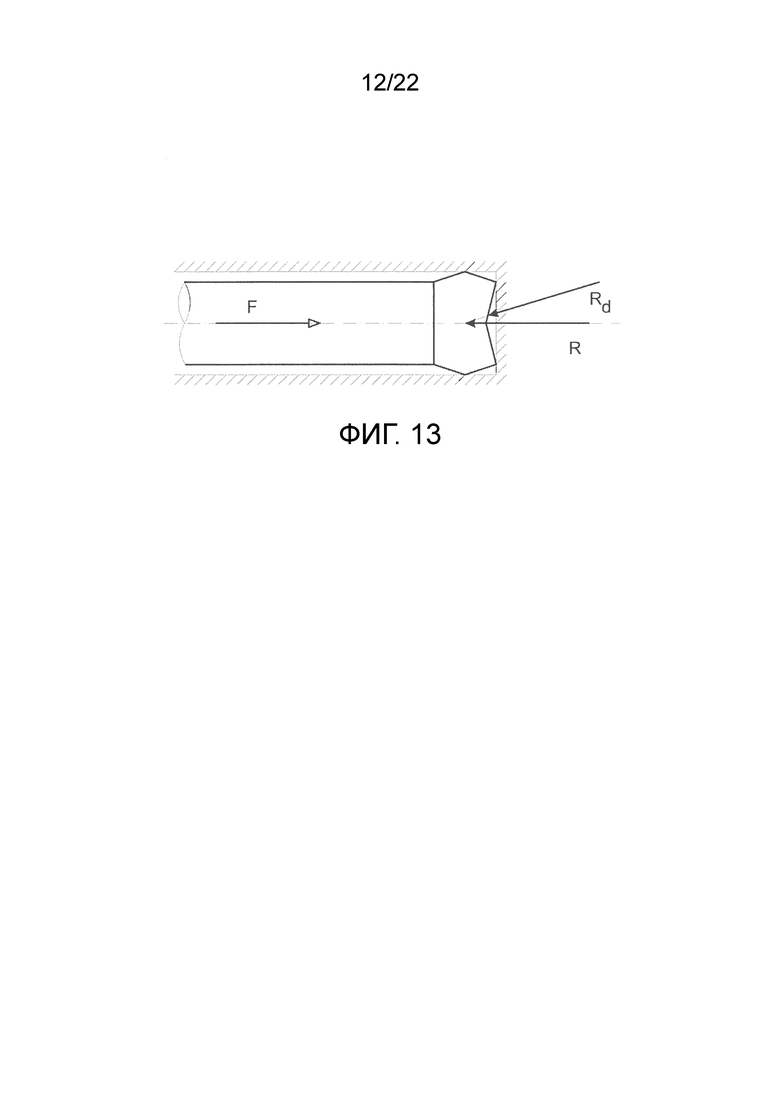
На фиг. 13 показаны силы на буровом долоте (F - сила от осевой нагрузки на долото, R -сила реакции, Rd - действующая сила реакции после приложения управления импульсом RED).
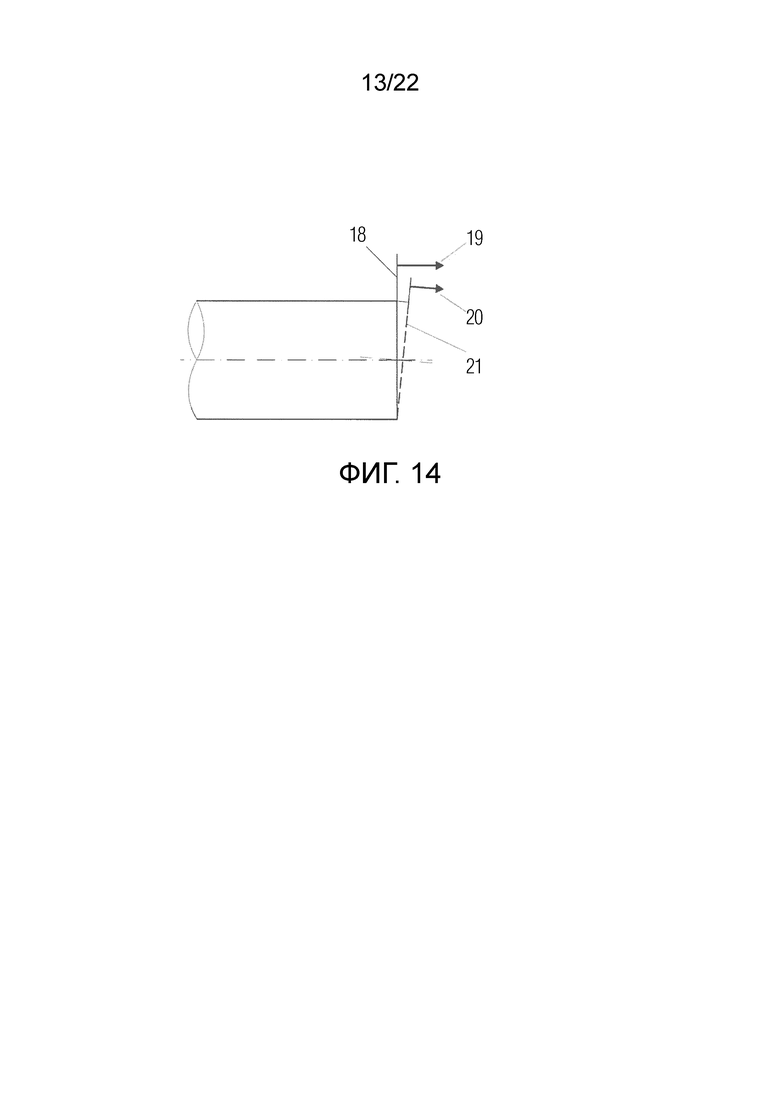
На фиг. 14 показано изменение направления бурения после приложения импульса активирования. Начальная поверхность продвижения (18); начальное направление бурения (19); новое направление бурения (20); новая поверхность продвижения (21).
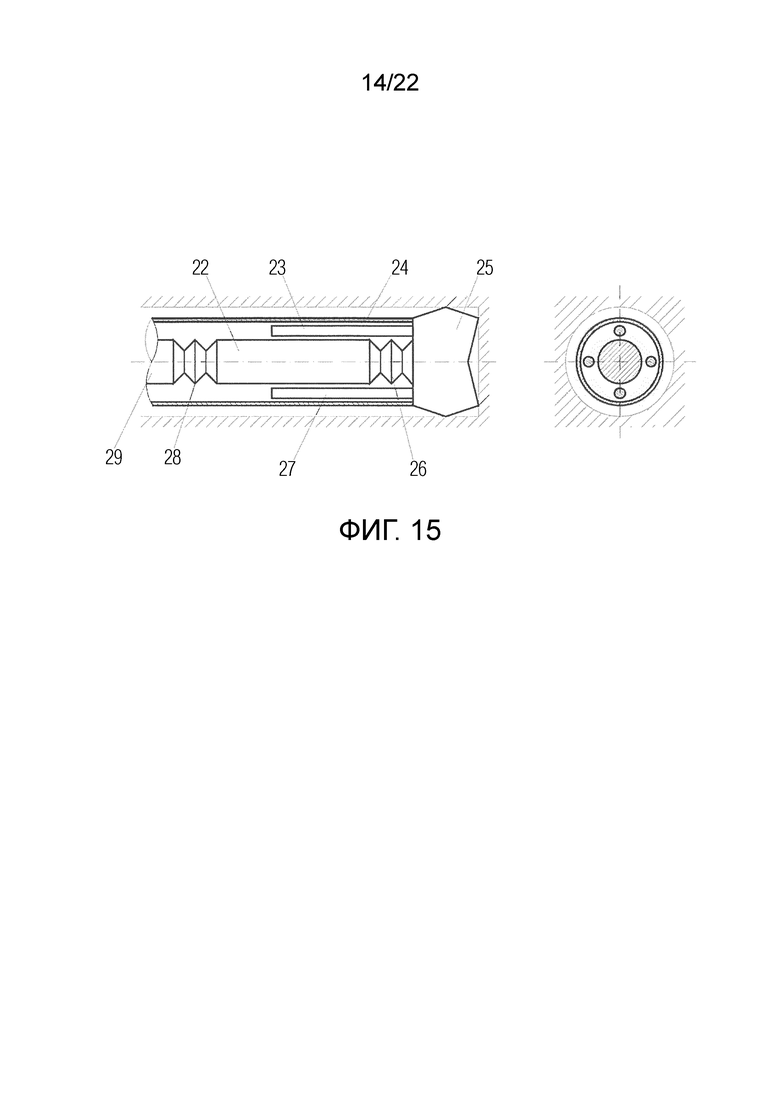
На фиг. 15 показано концептуальное представление устройства изобретения с одним основным исполнительным механизмом (RED) и четырьмя дополнительными исполнительными механизмами управления направлением движения (22-основной исполнительный механизм, 23-дополнительные исполнительные механизмы управления направлением движения, 24 - наружный корпус устройства, 25-буровое долото, 26- улучшающая вибрацию пружина RED, 27-дополнительный исполнительный механизм управления направлением движения, 28 - виброизолирующая пружина RED, 29-соединение с бурильной колонной) с сечением.
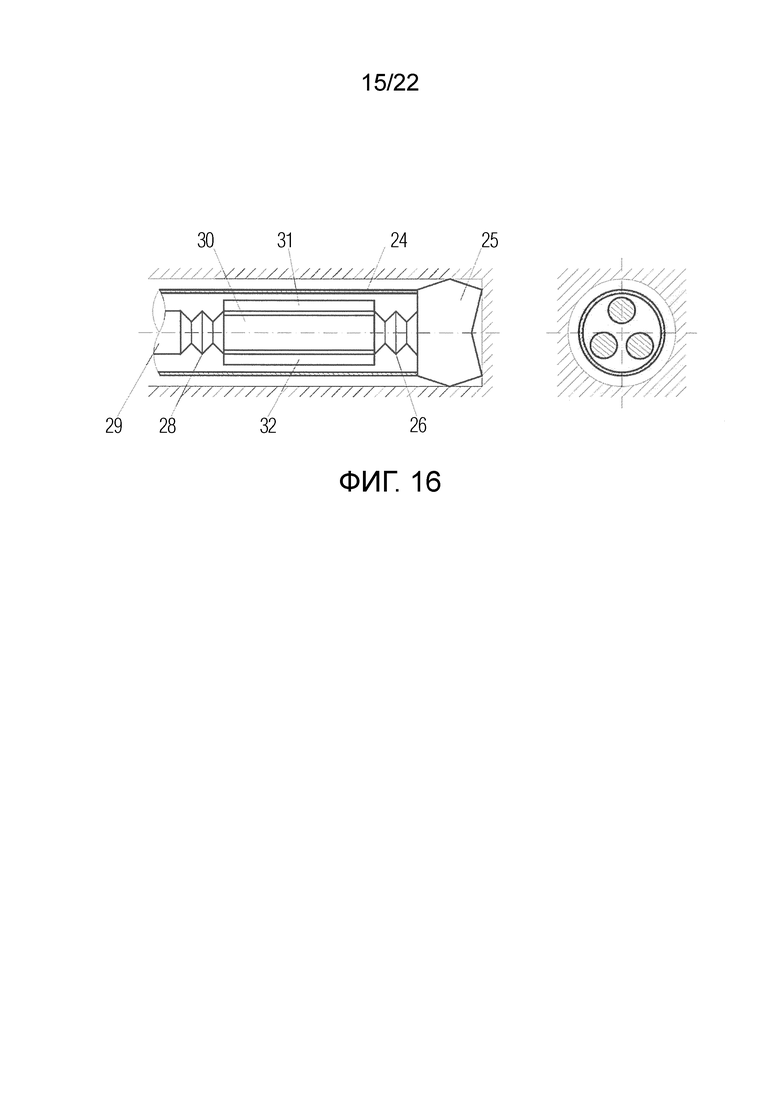
На фиг. 16 показано концептуальное представление устройства изобретения с тремя эквивалентными исполнительными механизмами, действующими как исполнительные механизмы управления направлением движения, а также как исполнительные механизмы RED вместо основного исполнительного механизма (30-первый исполнительный механизм, 31- второй исполнительный механизм, 24-наружный корпус устройства, 25-буровое долото, 26-улучшающая вибрацию пружина RED, 32-третий исполнительный механизм, 28-виброизолирующая пружина RED, 29-соединение с бурильной колонной) с сечением.
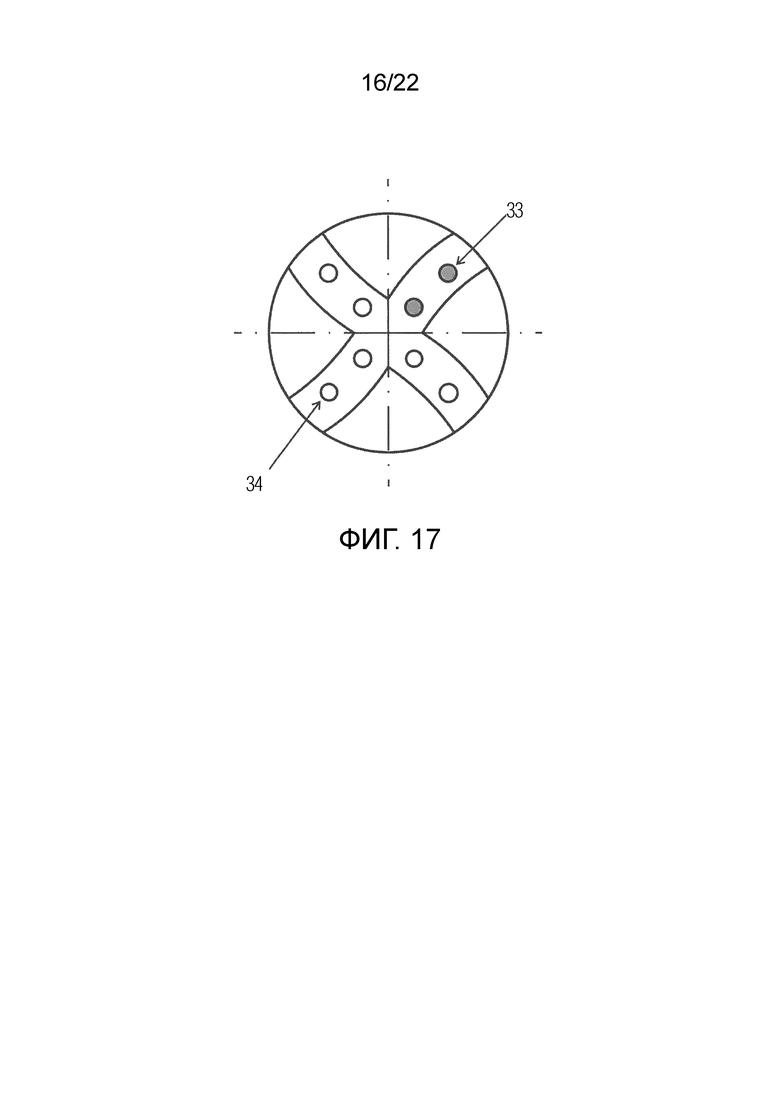
На фиг. 17 показано упрощенное представление низа бурового долота с комбинацией вставок управления направлением движения: вставки (33) RED и стандартные вставки (34).
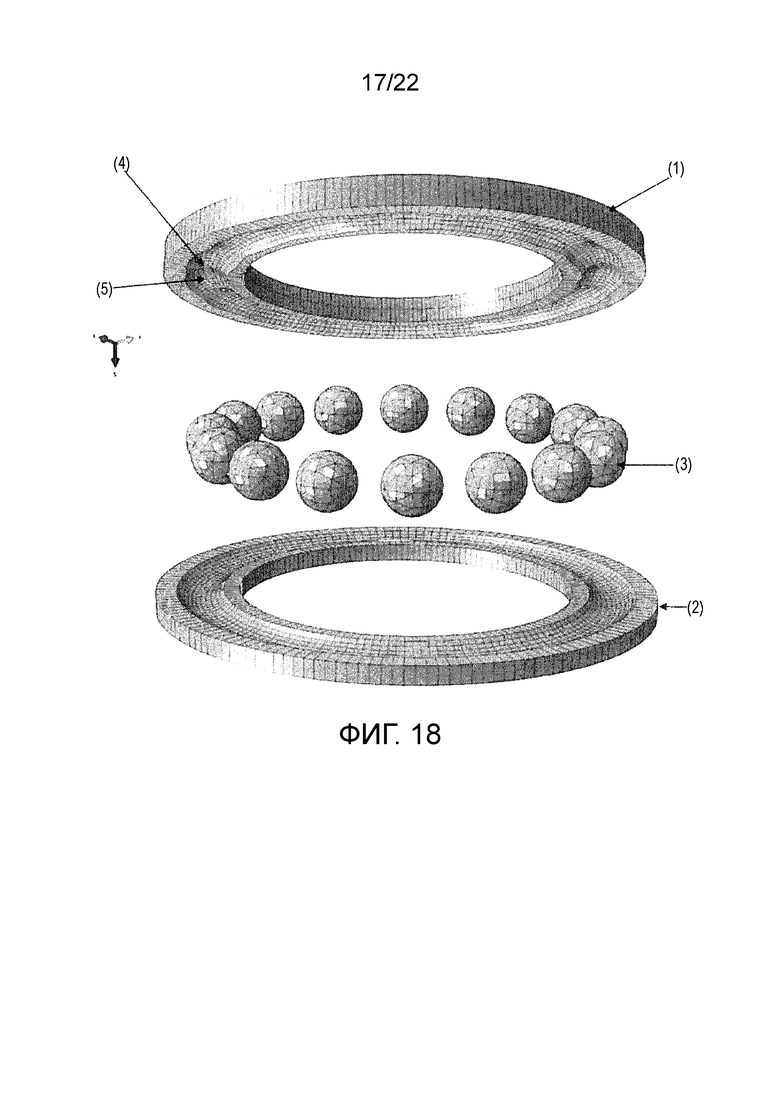
На фиг. 18 показан блок изобретения, включающий в себя вращающийся элемент (1), базовый элемент (2), один или более подшипников (3), поднятые участки (4) и опущенные участки (5), при этом поднятые и опущенные участки представлены, как "дорожка качения с канавками" вставленная во вращающийся элемент. Дорожка качения или канавка имеет тангенциальное сечение в форме дуги окружности. Дорожка качения или канавка сокращается по ширине и глубине для обеспечения уменьшенной площади сечения с регулярными интервалами.
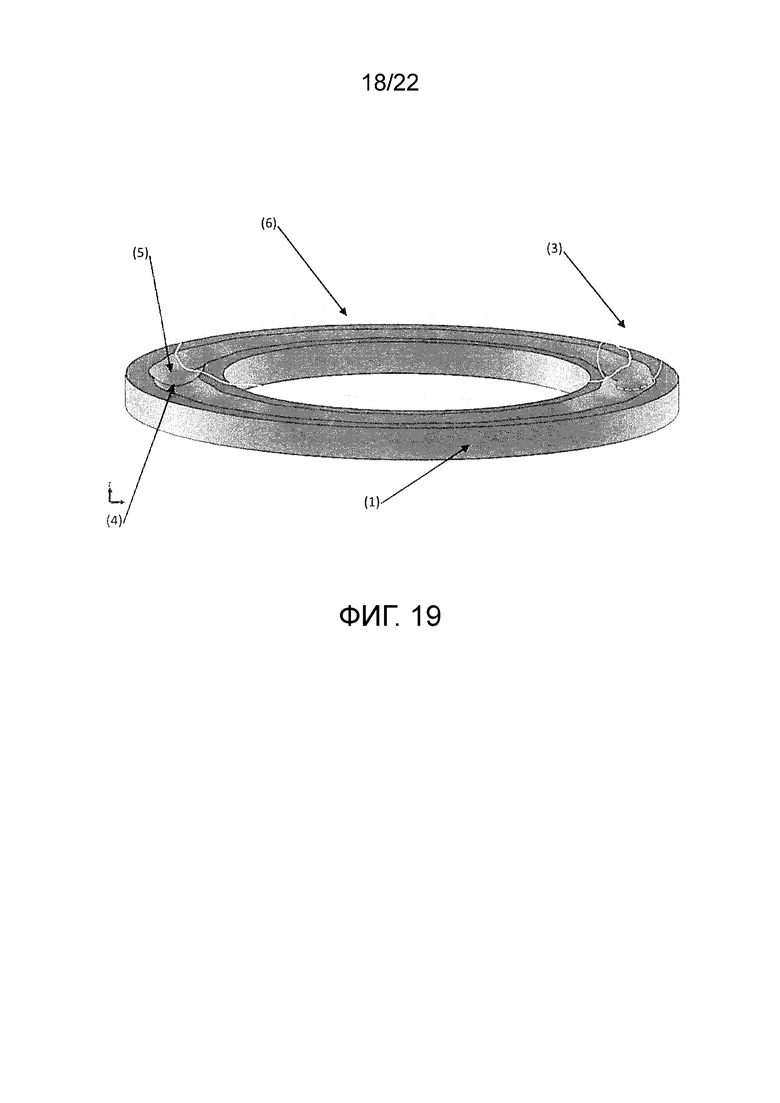
На фиг. 19 показан вращающийся элемент фиг. 18 и, в частности, 'дорожка качения с канавками'. Показаны вращающийся элемент (1), один или более подшипников (3), поднятые участки (4) и опущенные участки (5). Также показан путь (6) центра шарикоподшипника, прошедшего 'снабженную канавками дорожку качения'. Центр следует синусоидальному пути в тангенциальном/направлении по окружности, с гармоническими колебаниями в аксиальной (т.e. вертикальной) коррекции. Аналогично показанному на фиг. 18, дорожка качения или канавка имеет тангенциальное сечение в форме дуги окружности.
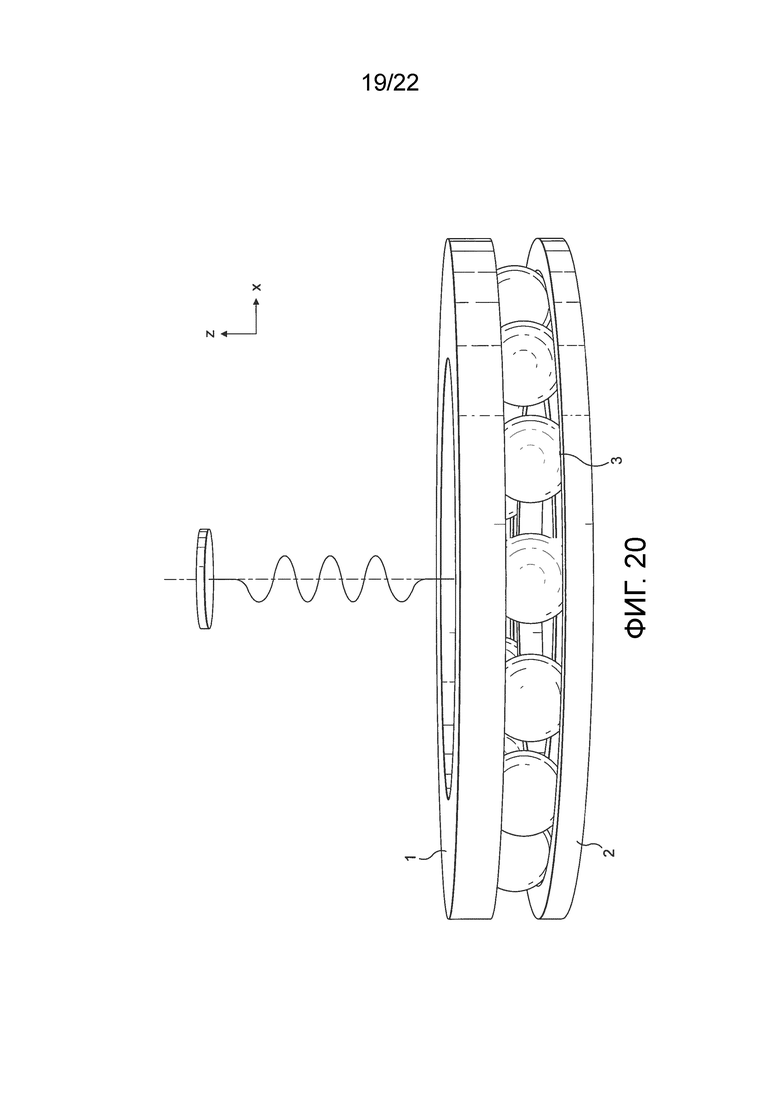
На фиг. 20 показана конечноэлементная (FE) модель с основными компонентами с обоймой, имеющей 16 шариков.
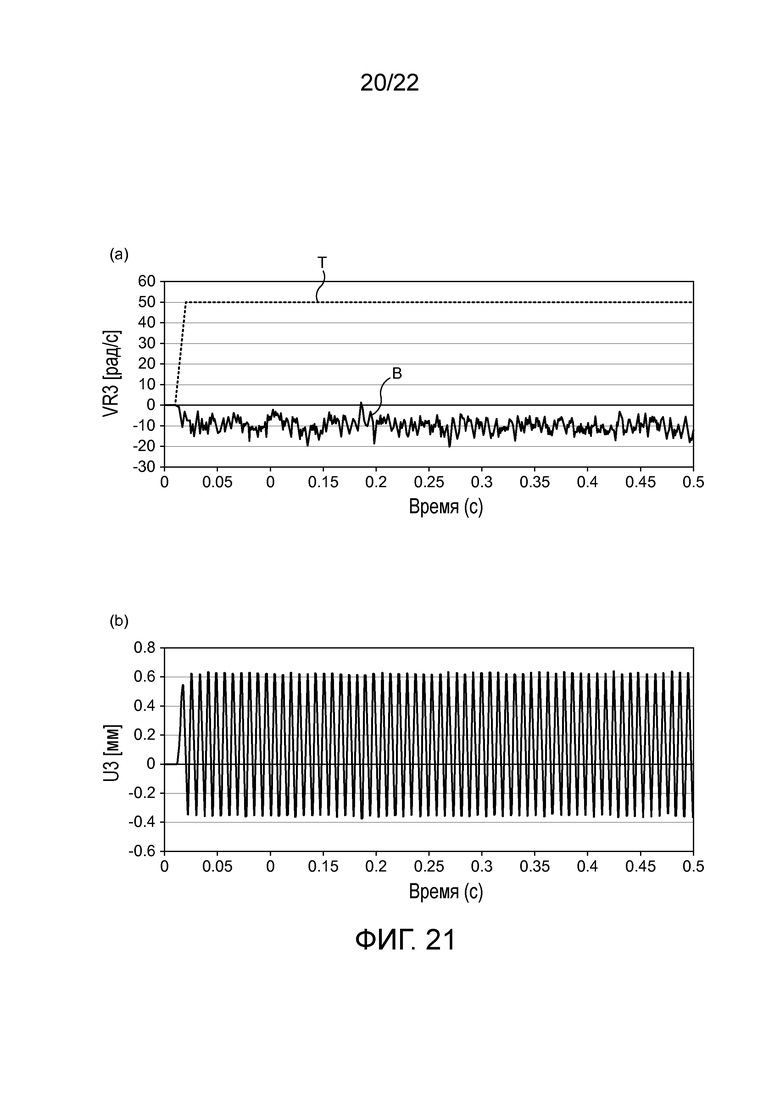
На фиг. 21 показаны временные диаграммы FE результатов, вычисленных для 50 рад/с; (a) угловая скорость верхнего (верхняя линия) и нижнего (нижняя линия) колец, (b) аксиальное смещение верхнего кольца.
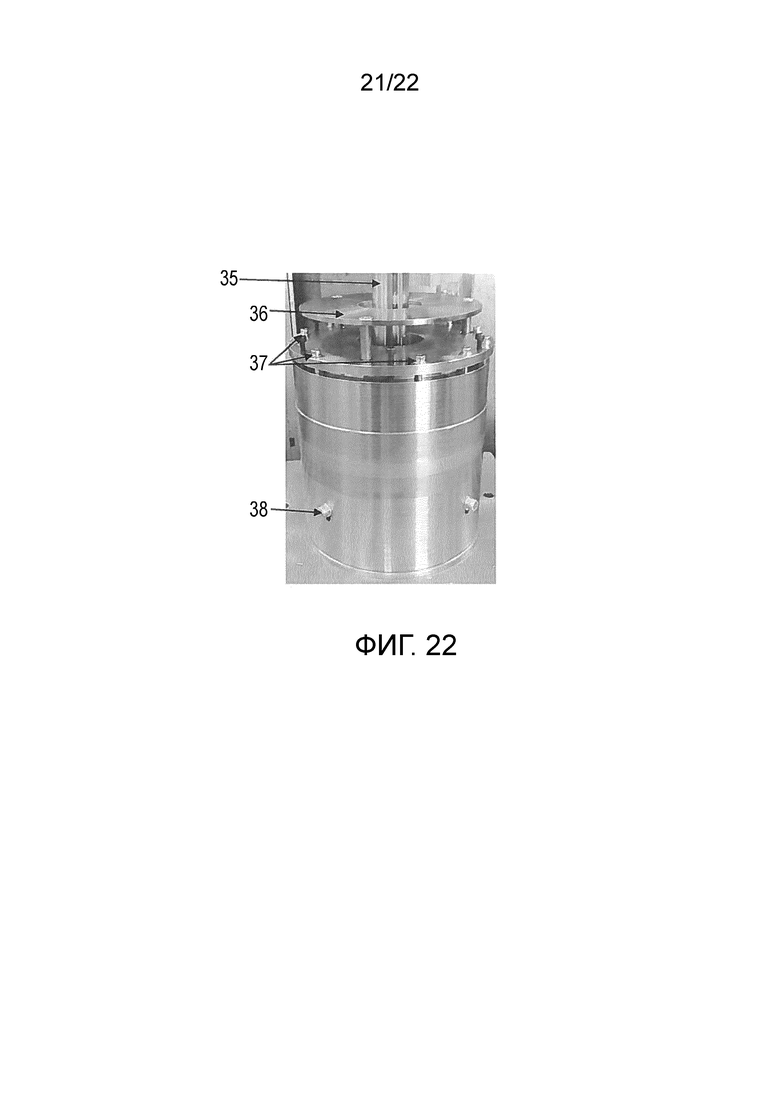
На фиг. 22 показан механический модуль RED. Указаны вал (35), коллектор (36) перемещения, контроллер (37) предварительного нагружения и фиксатор (38) подшипника.
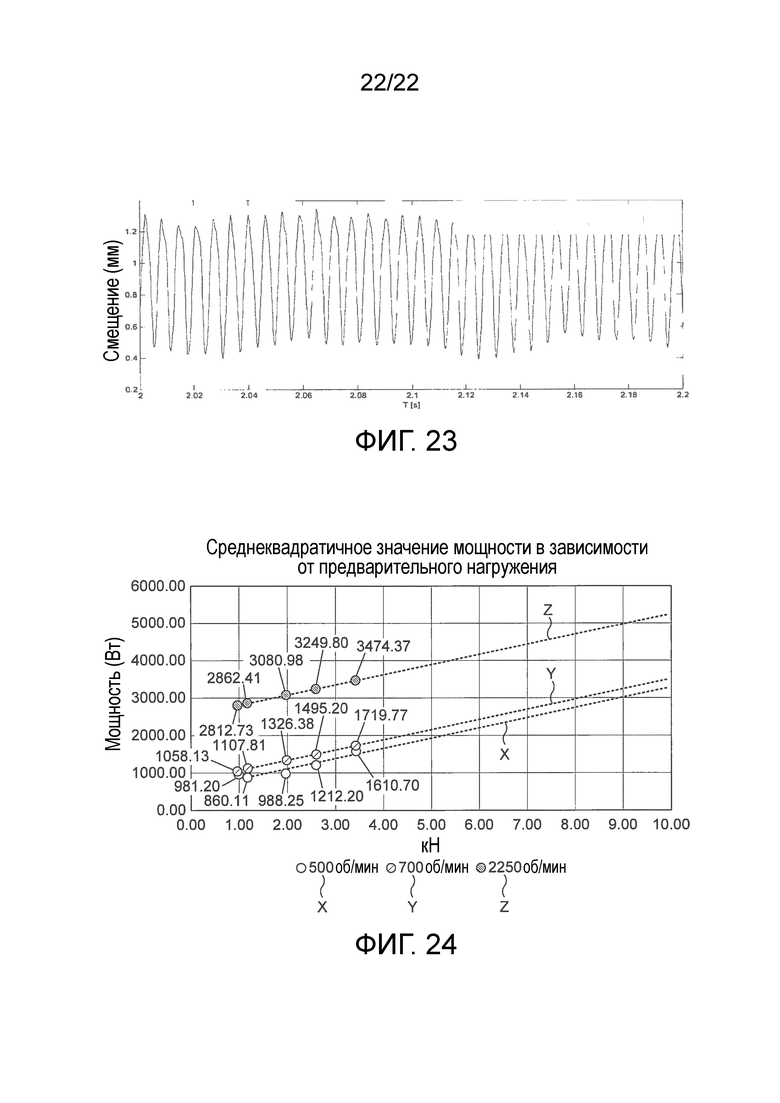
На фиг. 23 показано аксиальное смещение коллектора перемещения для номинальной скорости 650 об/мин.
На фиг. 24 показано среднеквадратичное значение (RMS) мощности, потребляемой для поддержания вращения диска с дорожкой качения для отличающихся предварительных нагрузок, а также линейная экстраполяция для более высоких предварительных нагрузок. На фигуре нижняя линия (X), средняя линия (Y) и верхняя линия (Z) представляют средний крутящий момент для 500, 700 и 2250 об/мин, соответственно.
Как упомянуто выше, приспособление работает, преобразуя вращение в аксиальное перемещение. В нем задействован кинематический механизм, который трансформирует вращение вращающегося элемента относительно базового элемента в периодическое аксиальное возбуждение, см. фиг. 1 и 2.
При условии, что относительная скорость n вращения является суммой скоростей вращения обеих сторон:
n1+n2
частота возбуждения должна быть произведением данной суммы и количества N канавок:
fa=N(n1+n2)/60,
если n1 и n2 даны в об/мин.
Амплитуда возбуждения составляет половину перепада между горбом и впадиной на дорожке качения, вставленной во вращающийся элемент. Следует отметить что здесь шарикоподшипники показаны только для иллюстрации, и может применяться подшипниковое устройство любого вида, в том числе, гидростатическое и гидродинамическое.
В варианте осуществления количество N канавок (то есть, пар поднятого участка и/или опущенного участка на базовом элементе или элементе вращения), может иметь диапазон от 3 до 100, более предпочтительно, от 8 до 50, более предпочтительно, от 10 до 40, более предпочтительно, от 12 до 30 и, более предпочтительно, от 14 до 20. Предпочтительным количеством N канавок является 16. Количество одного или более подшипников предпочтительно совпадает с количеством N канавок.
На фиг. 3 представлен пример конструктивного решения исполнительного механизма. Механизм содержит внутреннюю (7) и наружную (8) трубы. Внутренняя труба может подавать буровой раствор; наружная труба может иметь диаметр бурильного инструмента. Вращение вала 1 относительно вала 2 трансформируется посредством преобразователя (9). Требуемое аксиальное перемещение с амплитудой A и частотой fa может отбираться с вала 2. Один или два вала могут приводиться в действие любым одним или более из следующего: стандартный гидравлический забойный двигатель; выполненный по заказу гидравлический забойный двигатель; турбина, вращаемая буровым раствором; пневматический двигатель; и электрический двигатель. В варианте осуществления двигатель может содержать механизм сцепления для изменения скорости и/или крутящего момента. Понятно что гидравлический забойный двигатель и турбина, вращаемая буровым раствором, приводится в действие потоком и давлением, обеспечиваемым буровым раствором или любой другой текучей средой, прокачиваемой через нее. Пневматический двигатель приводится в действие сжатым воздухом или другим газом. Электрический двигатель питается переменным и/или постоянным электрическим током. Выбор подходящего двигателя для приведения в действие блока должен зависеть от конкретного варианта применения; в варианте, где устройство применяется на глубине и/или под водой, или где сам вариант применения связан с подачей насосом текучей среды на забой скважины под высоким давлением, можно применять гидравлический забойный двигатель или турбину, вращаемую буровым раствором; в случае, если устройство применяется для небольших глубин, электрический двигатель может быть более подходящим; и в случае, если устройство применяется в горных разработках, подходящим может быть пневматический двигатель. Примером подходящего электрического двигателя является бескорпусный электрический двигатель, производимый Kollmorgen, Redmond, US, такой как KBM frameless series.
Понятно, что конкретный двигатель может обеспечить вращение только в ограниченном диапазоне скоростей. Следовательно, для данного количества поднятых участков и/или опущенных участков, то есть, N канавок в соединении с конкретным двигателем, диапазон частот может быть аналогично ограниченным. Поэтому, в варианте осуществления может быть обеспечено множество приспособлений, где количества N канавок, связанных с каждым приспособлением, отличаются. Множество приспособлений может быть установлено в таком устройстве, как бурильный инструмент, где любое одно из приспособлений может быть активировано в заданное время. Приспособления могут быть установлены последовательно. Когда требуется более низкий диапазон частот, можно активировать приспособление, имеющее малое количество N канавок, и наоборот. Приспособление может быть деактивировано посредством предотвращения перемещения вращающегося элемента относительно базового элемента. В варианте осуществления можно применять штифт или фиксатор для предотвращения такого перемещения, но понятно, что другое средство можно применять для остановки такого перемещения. Понятно, что при обеспечении множества приспособлений в устройстве, где количества N канавок, связанных с каждым приспособлением, отличаются, становится возможным более широкий диапазон частот, чем в варианте где обеспечено только одно приспособление.
Позиционирование верхнего датчика нагрузки является таким, что может быть измерена статическая аксиальная нагрузка от бурильной колонны. Позиция нижнего датчика нагрузки является такой что можно осуществлять мониторинг динамический нагрузки, передаваемой с генератора колебаний на буровое долото. Датчики нагрузки соединены с контроллером для обеспечения управления на забое в скважине генератором колебаний по замкнутому контуру с обратной связью в режиме реального времени.
Понятно, что при условии подачи электропитания на забой скважины, устройство (устройства) вариантов осуществления изобретения может функционировать автономно и регулировать вращательные и/или вибрационные нагрузки на буровое долото, реагируя на текущие условия бурения для оптимизации механизма бурения.
Во время бурения долото вращательного бурения вращается, и аксиально ориентированная динамический нагрузка прикладывается к буровому долоту исполнительным механизмом для генерирования зоны распространения трещин для содействия проходке породы (материала) долотом вращательного бурения.
Приспособление или исполнительный механизм управляется согласно предпочтительным способам настоящего изобретения. Таким образом, изобретение дополнительно обеспечивает способ управления буром резонансно-усиленного вращательного бурения, содержащим приспособление или исполнительный механизм, определенный выше, способ содержит:
регулирование частоты (f) приспособления или исполнительного механизма в буре резонансно-усиленного вращательного бурения, при этом частота (f) поддерживается в диапазоне:
(D2 Us/(8000πAm))1/2 ≤ f ≤ Sf(D2 Us/(8000πAm))1/2
где D диаметр долота вращательного бурения, Us прочность на сжатие материала, в котором осуществляют бурение, A амплитуда колебаний, m вибрирующая масса, и Sf коэффициент масштабирования, больше 1; и
регулирование динамической силы (Fd) приспособления или исполнительного механизма в буре резонансно-усиленного вращательного бурения, при этом динамическая сила (Fd) поддерживается в диапазоне:
[(π/4)D2effUs] ≤ Fd ≤ SFd[(π/4)D2effUs]
где Deff эффективный диаметр долота вращательного бурения, Us прочность на сжатие материала, в котором осуществляют бурение, и SFd коэффициент масштабирования больше 1,
при этом частота (f) и динамическая сила (Fd) приспособления или исполнительного механизма регулируются с помощью мониторинга сигналов, представляющих прочность (Us) на сжатие материала, в котором осуществляют бурение, и регулирования частоты (f) и динамической силы (Fd) приспособления или исполнительного механизма с применением устройства с замкнутым контуром и обратной связью в режиме реального времени согласно изменениям прочности (Us) на сжатие породы (материала), бурение которой осуществляется.
Диапазоны частоты и динамической силы получают на основе следующего анализа.
Прочность на сжатие породы пласта дает нижнюю границу необходимых ударных сил. Минимальная требуемая амплитуда динамической силы вычислена, как:
где Deff эффективный диаметр долота вращательного бурения, который является диаметром D бурового долота, пересчитанным согласно доле бурового долота, которая контактирует с породой, бурение которой осуществляется. Таким образом, эффективный диаметр Deff может быть определен, как:
где Scontact коэффициент масштабирования, соответствующий доле бурового долота, которая контактирует с породой, бурение которой осуществляется. Например, определив, что только 5% поверхности бурового долота контактирует с породой, бурение которой осуществляется, эффективный диаметр Deff можно определить, как:
Вышеупомянутые вычисления обеспечивают нижнюю границу для динамический силы приспособления или исполнительного механизма. Применение динамической силы, которая больше данной нижней границы, генерирует зону распространения трещин перед буровым долотом во время работы. Вместе с тем, если динамическая сила слишком большая, зона распространения трещин должна уходить далеко от бурового долота, нарушая стабильность ствола скважины и снижая качество ствола скважины. В дополнение, если динамическая сила, передаваемая на инструмент вращательного бурения приспособлением или исполнительным механизмом, слишком большая, это может приводить к ускоренному и катастрофическому износу и/или отказу инструмента. Соответственно, верхнюю границу динамической силы можно вычислить, как:
SFd[(π/4)D2effUs],
где SFd коэффициент масштабирования больше 1. На практикe SFd выбирают согласно породе, бурение которой осуществляется, обеспечивая, что зона распространения трещин не уходит слишком далеко от бурового долота, нарушая стабильность и снижая качество ствола скважины. Кроме того, SFd выбирают согласно прочности компонентов инструмента вращательного бурения, чтобы выдерживать ударные силы приспособления или исполнительного механизма. Для некоторых вариантов применения SFd должен быть выбран меньше 5, предпочтительно меньше 2, более предпочтительно, меньше 1,5 и, наиболее предпочтительно, меньше 1,2. Низкие значения SFd (например, близкие к 1) должны обеспечивать весьма компактные и регулируемые зоны распространения трещин, а также увеличенный эксплуатационный ресурс бурильных компонентов за счет скорости распространения. При этом низкие значения SFd требуются для строительства стабильных, высококачественных стволов скважин. С другой стороны, если скорость распространения является более важным условием, может быть выбрано более высокое значение SFd.
Во время ударов приспособления или исполнительного механизма с периодом τ скорость бурового долота массой m меняется на величину Δv, вследствие контактной силы F=F(t):
где контактную силу F(t) считают гармонической возвращающей силой. Амплитуда силы F(t) является предпочтительно выше, чем у силы Fd, требуемой для разрушения породы, бурение которой осуществляется. Таким образом, нижнюю границу изменения импульса можно найти следующим образом:

При условии, что что буровое долото совершает гармонические колебания между ударами, максимальная скорость бурового долота vm=Aω, где A амплитуда колебаний, и ω=2πf является угловой частотой. При условии, что удар происходит, когда буровое долото имеет максимальную скорость vm, и что буровое долото останавливается во время удара, Δv=vm=2Aπf. Соответственно, вибрирующая масса выражается, как
Данное выражение содержит τ, период удара. Продолжительность удара определяется многими факторами, в том числе свойствами материала пласта и инструмента, частотой ударов и другими параметрами. Для упрощения, τ оценивают составляющим 1% периода времени колебания, то есть, τ=0,01/f. Данное дает нижнюю оценку частоты, которая может обеспечивать достаточный импульс для ударов:
Необходимая минимальная частота обратно пропорциональна квадратному корню из амплитуды колебаний и массы долота.
Приведенные выше вычисления обеспечивают нижнюю границу для частоты приспособления или исполнительного механизма. Что касается параметра динамической силы, использование частоты, которая больше данной нижней границы, генерирует зону распространения трещин перед буровым долотом во время работы. Вместе с тем, если частота слишком большая, зона распространения трещин должны уходить далеко от бурового долота, нарушая стабильность ствола скважины и снижая качество ствола скважины. В дополнение, если частота слишком большая это может приводить к ускоренному и катастрофическому износу и/или отказу инструмента. Соответственно, верхнюю границу частоты можно определить, как:
Sf(D2 Us/(8000πAm))1/2
где Sf коэффициент масштабирования больше 1. Соображения, одинаковые с рассмотренными выше для SFd, применяют для выбора Sf. Таким образом, для некоторых вариантов применения Sf должен быть выбран меньше 5, предпочтительно меньше 2, более предпочтительно меньше 1,5 и, наиболее предпочтительно, меньше 1,2.
В дополнение к вышеупомянутым соображениям для рабочей частоты приспособления или исполнительного механизма, предпочтительно поддержание частоты в диапазоне который приближается, но не превышает, условий пикового резонанса для породы, бурение которой осуществляется. То есть, частота является, предпочтительно, достаточно высокой, приближающейся к пиковому резонансу для бурового долота в контакте с породой, бурение которой осуществляется, но достаточно низкой, чтобы частота не превышала частоты, соответствующей условиям пикового резонанса, которые должны приводить к резкому падению амплитуды. Соответственно, Sf предпочтительно, выбирают при условии:
fr/Sr ≤ f ≤ fr
где fr частота, соответствующая условиям пикового резонанса для породы, бурение которой осуществляется, и Sr коэффициент масштабирования больше 1.
Соображениями, аналогичными рассмотренным выше для SFd и Sf, руководствуются для выбора Sr. Для некоторых вариантов применения должен быть выбран Sr меньше 2, предпочтительно меньше 1,5, более предпочтительно, меньше 1,2. Высокие значения Sr обеспечивают использование более низких частот, что может приводить к уменьшенной зоне распространения трещин и более низкой скорости распространения. Более низкие значения Sr (т.e. близкие к 1) должны ограничивать частоту диапазоном близким к условиям пикового резонанса, что может приводить к большим зонам распространения трещин и более высокой скорости распространения. Вместе с тем, если зоны распространения трещин становятся слишком большими, это может нарушать стабильность ствола скважины и снижать качество ствола скважины.
Одной проблемой бурения через материалы, имеющие меняющиеся резонансные характеристики, является то, что изменение в резонансных характеристиках может приводить к неожиданному превышению рабочей частотой условий пикового резонанса, что должно приводить к резкому падению амплитуды. Для решения данной проблемы может быть целесообразным выбрать Sf при котором:
f ≤ (fr - X)
где X коэффициент безопасности, обеспечивающий, что частота (f) не превышает условий пикового резонанса на переходе между двумя отличающимися материалами бурение которых осуществляется. В таком устройстве частоту можно регулировать для поддержания в диапазоне, определенном следующим:
fr/Sr ≤ f ≤ (fr - X),
где Х коэффициент безопасности, обеспечивающий частоту, достаточно далекую от условий пикового резонанса для предотвращения неожиданного превышения рабочей частотой условий пикового резонанса на переходе от материала одного типа к другому, при которых должно происходить резкое падение амплитуды.
Аналогично, коэффициент безопасности может быть введен для динамической силы. Например, если большая динамическая сила прикладывается к материалу, имеющему большую прочность на сжатие, и затем происходит переход к материалу, имеющему гораздо более низкую прочность на сжатие, указанное может приводить к неожиданному резкому увеличению динамической силы, что приводит к уходу зоны распространения трещин далеко от бурового долота, нарушая стабильность ствола скважины и качество ствола скважины на переходных материалах. Для решения данной проблемы может быть целесообразной работа в следующем диапазоне динамической силы:
Fd ≤ SFd [(π/4)D2effUs - Y],
где Y коэффициент безопасности, обеспечивающий, что динамическая сила (Fd) не превышает предела, обуславливающего катастрофическое удлинение трещин на переходе между двумя отличающимися материалами, бурение которых осуществляется. Коэффициент безопасности, Y обеспечивает, что динамическая сила не становится слишком высокой, и что если происходит неожиданный переход к материалу, который имеет низкую прочность на сжатие, это не приводит к катастрофическому удлинению зоны распространения трещин, нарушающему стабильность ствола скважины.
Коэффициенты безопасности, X и/или Y могут быть установлены согласно прогнозируемым вариациям в типе материала и скорости, с которой могут изменяться частота и динамическая сила, когда обнаружено изменение в типе материала. То есть, один или оба, X и Y, предпочтительно являются регулируемыми согласно прогнозным вариациям в прочности (Us) на сжатие материала, в котором осуществляют бурение, и скорости, с которой частота (f) и динамическая сила (Fd) могут быть изменены, когда обнаружено изменение в прочности (Us) на сжатие материала, в котором осуществляют бурение. Обычные диапазоны для X включают в себя:
X > fr/100; X > fr/50; или X > fr/10. Обычные диапазоны для Y включают в себя:
Y > SFd[(π/4)D2effUs]/100;
Y > SFd [(π/4)D2effUs]/50; или
Y > SFd [(π/4)D2effUs]/10.
Варианты осуществления, в которых использованы данные коэффициенты безопасности, можно считать компромиссом между работой при оптимальных условиях функционирования для каждого материала структуры из комбинации слоев и обеспечением плавного перехода на стыке между каждым из слоев материала для поддержания стабильности ствола скважины на стыках.
Описанные выше варианты осуществления настоящего изобретения применимы для любого размера бурильного инструмента и любого материала, подлежащего бурению. Некоторые более конкретные варианты осуществления предназначены для бурения через пласты горной породы, в особенности, пласты с меняющимся составом, с которыми можно сталкиваться при глубоком бурении в нефтегазовой и горнодобывающей отраслях. Остаются открытыми вопросы цифровых величин, подходящих для бурения через такие пласты горной породы.
Прочность на сжатие пластов горной породы значительно варьируется, от около Us=70 МПа для песчаника до Us=230 МПа для гранита. В вариантах широкомасштабного применения для бурения, таких как в нефтяной промышленности, диаметры буровых долот имеют диапазон от 90 до 800 мм (3 ½ - 32ʺ). Если только приблизительно 5% поверхности бурового долота находится в контакте с пластом горной породы, самое низкое вычисленное значение для требуемой динамической силы составляет приблизительно 20 кН (для проходки 90 мм буровым долотом песчаника). Аналогично, самое высокое вычисленное значение для требуемой динамической силы составляет приблизительно 6000 кН (для проходки 800 мм буровым долотом гранита). При этом, для проходки пластов горной породы динамическую силу предпочтительно регулируют, поддерживая в диапазоне 20-6000 кН в зависимости от диаметра бурового долота. Поскольку потребляется много энергии для приведения в действие приспособления или исполнительного механизма с динамической силой 6000кН, предпочтительным может быть использование изобретения с диаметрами бурового долота от малых до средних для многих вариантов применения. Например, буровые долота диаметрами 90-400 мм дают рабочий диапазон 20-1500 кН. Дополнительное сужение диапазона диаметра бурового долота дает предпочтительные диапазоны для динамической силы 20-1000 кН, более предпочтительно, 20-500 кН, еще более предпочтительно, 20-300 кН.
Нижняя оценка для необходимой амплитуды смещения колебаний должна иметь заметно большую вибрацию, чем смещения от произвольных малых скачков режущей кромки, вследствие гетерогенности в пласте горной породы. При этом амплитуда колебаний составляет предпочтительно, по меньшей мере 1 мм. Соответственно, амплитуда колебаний приспособления или исполнительного механизма может поддерживаться в диапазоне 1-10 мм, более предпочтительно 1-5 мм.
Для крупного бурового оборудования вибрирующая масса может составлять порядка 10-1000 кг. Практически осуществимый частотный диапазон для такого крупного бурового оборудования не поднимается выше нескольких сотен герц. При этом, выбирая подходящие значения диаметра бурового долота, вибрационной массы и амплитуды колебаний в описанных выше пределах, частоту (f) приспособления или исполнительного механизма можно регулировать, поддерживая в диапазоне 100-500 Гц, обеспечивая достаточную динамическую силу для создания зоны распространения трещин для некоторого диапазона отличающихся типов горной породы и достаточно высокую частоту для достижения эффекта резонанса.
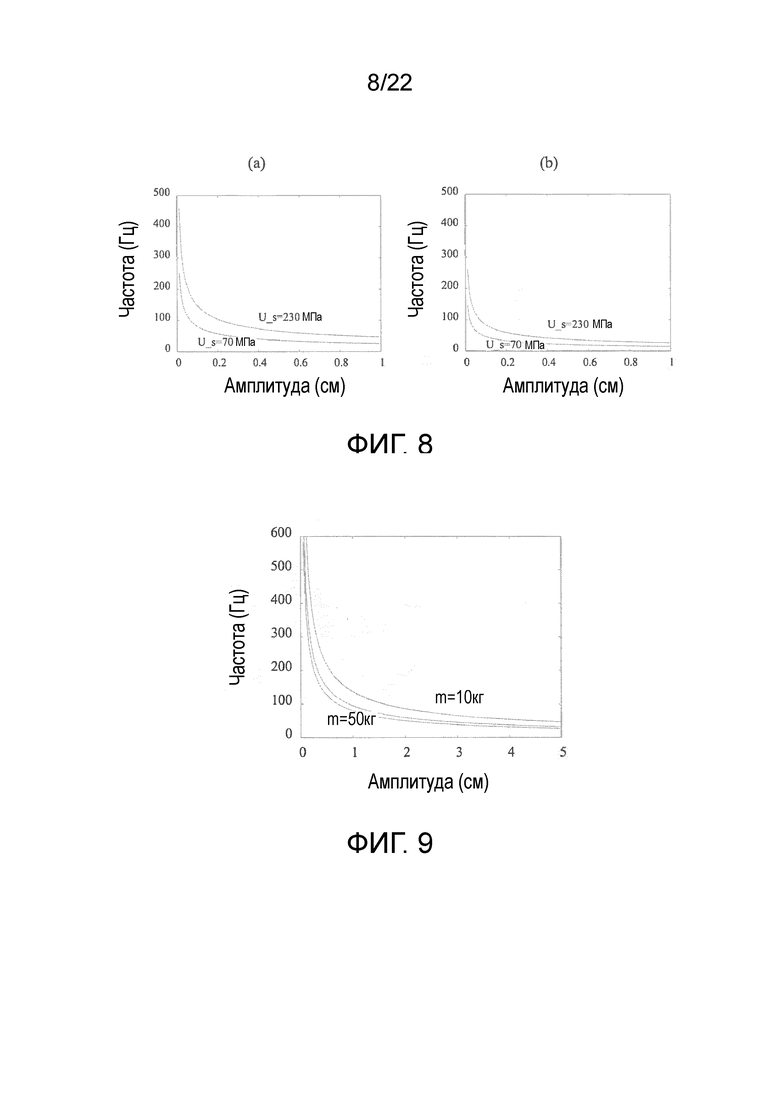
На фиг. 8(a) и (b) показаны графики, иллюстрирующие необходимую минимальную частоту, как функцию амплитуды колебаний для бурового долота диаметром 150 мм. График (a) построен для вибрационной массы m=10 кг, а график (b) для вибрирационной массы m=30 кг. Нижние кривые применимы для более слабых пластов горной породы, а верхние кривые для горной породы с высокой прочностью на сжатие. Как можно видеть из графиков, рабочая частота 100-500 Гц в зоне выше кривых должна обеспечивать достаточно высокую частоту для генерирования зоны распространения трещин в горной породе всех типов с применением амплитуды вибрации в диапазоне 1-10 мм (0,1-1 см).
На фиг. 9 показан график, иллюстрирующий максимальную применимую частоту, как функцию амплитуды колебаний для различных вибрирационных масс при условии фиксированного электропитания. График просчитан для электропитания 30 КВт, которое может генерировать на забое скважины гидравлический забойный двигатель или турбина, применяемая для приведения во вращение бурового долота. Верхняя кривая построена для вибрационной массы 10 кг, а нижняя кривая для вибрационной массы 50 кг. Как можно видеть из графика, частотный диапазон от 100 до 500 Гц является доступным для амплитуды вибрации в диапазоне от 1 до 10 мм (0,1-1 см).
Для реализации описанного выше способа может быть выполнен контроллер и встроен в модуль резонансно-усиленного вращательного бурения, такой как в вариантах осуществления изобретения фиг. 4 5. Модуль резонансно-усиленного вращательного бурения снабжен датчиками (например, датчиками нагрузки) которыми осуществляют мониторинг прочности на сжатие материала, в котором осуществляют бурение, либо напрямую или не напрямую, и передают сигналы на контроллер, которые представляют прочность на сжатие материала, в котором осуществляют бурение. Контроллер выполнен с возможностью приема сигналов с датчиков и регулирования частоты (f) и динамической силы (Fd) приспособления или исполнительного механизма с применением механизма с замкнутым контуром и обратной связью в режиме реального времени, согласно изменениям прочности на сжатие, (Us) материала, в котором осуществляют бурение.
Изобретатели определили, что наилучшим расположением для обеспечения управление с обратной связью является установка всех измерительных, обработки данных и управляющих элементов механизма обратной связи в компоновке для забоя скважины. Данное устройство является самым компактным, обеспечивает самое быстрое реагирование с обратной связью на изменения в условиях резонанса, и также обеспечивает изготовление бурильных головок с интегрированием в них необходимого управления с обратной связью, так что бурильные головки допускают переоборудование в существующих бурильных колоннах, не требующее полной замены системы бурения.
Приспособление, исполнительный механизм и устройство изобретения особенно подходят для данной скважинной конфигурации, где высокое давление водонасыщенной окружающей среды является обычным. К такой окружающей среде трудно адаптировать магнитострикционные исполнительные механизмы и т.п. В отличие от указанного, механический исполнительный механизм изобретения доказал возможность адаптации к таким условиям.
На фиг. 10 показана схема, иллюстрирующая скважинный механизм с замкнутым контуром и обратной связью в режиме реального времени. Один или более датчиков 40 обеспечены для мониторинга частоты и амплитуды исполнительного механизма 42. Процессор 44 выполнен с возможностью приема сигналов с одного или более датчиков 40 и передачи одного или более выходных сигналов на контроллер 46 для регулирования частоты и амплитуды исполнительного механизма 42. Источник 48 электропитания соединен с контуром обратной связи. Источник 48 электропитания может быть гидравлическим забойным двигателем или турбиной, выполненной с возможностью генерировать электрический ток для контура с обратной связью. На фигуре источник электропитания показан соединенным с контроллером исполнительного механизма для обеспечения изменяемого электропитания исполнительного механизма в зависимости от сигналов, принятых с процессора. Вместе с тем, источник электропитания может быть соединен с любым одним или более компонентами в контуре с обратной связью. Маломощные компоненты, такие как датчики и процессор, могут иметь свое собственное электропитание в виде батареи.
Дополнительной целью настоящего изобретения является обеспечение улучшенной системы управления направлением движения для применения в наклонно-направленном бурении, и резонансно-усиленного наклонно-направленного бурения, указанные системы и способы обеспечивают более точное управление направлением движения, чем известные способы и системы, одновременно улучшая надежность и уменьшая стоимость, благодаря исключению тяжелого и сложного оборудования.
Таким образом, в дополнительном аспекте настоящее изобретение обеспечивает устройство для применения в наклонно-направленном бурении, устройству дано определение в приведенном выше описании, и оно дополнительно содержит:
(a) по меньшей мере один исполнительный механизм управления направлением движения, способный прикладывать продольную силу на устройстве для изменения направления бурения; и/или
(b) по меньшей мере одну вставку управления направлением движения бурового долота, способную выдвигаться и убираться для изменения режущих характеристик бурового долота и изменения при этом направления бурения.
В контексте данного аспекта настоящего изобретения 'наклонно-направленное бурение' означает бурение любого типа, в котором направление бурения можно изменять так, что получающийся ствол скважины (точнее ось ствола скважины) не проходит по прямой линии. Указанное включает в себя наклонно-направленное бурение любых и всех типов, известных в технике.
Также в контексте данного аспекта настоящего изобретения 'продольный' означает: в направлении, по существу, параллельном оси самого устройства; и/или, по существу, параллельном оси вращения устройства, бурильной компоновки или бурового долота; и/или, по существу, параллельном оси ствола скважины в зоне, где установлен исполнительный механизм управления направлением движения.
В работе включаются один или более исполнительных механизмов управления направлением движения, при этом продольная сила прикладывается, предпочтительно, на одной стороне устройства. Данное в свою очередь должно удлинять (или сокращать) устройство предпочтительно на одой стороне, при этом, достаточно 'изгибая' устройство для поворота бурового долота на небольшой угол. Данная деформация должна продолжаться до выключения исполнительного механизма (механизмов) управления направлением движения. В 'изогнутой' конфигурации, устройство должно вести бурение по криволинейной траектории, определенной степенью кривизны, создаваемой исполнительным механизмом (механизмами). Таким образом, кривизну траектории можно регулировать, прикладывая большую или меньшую силу посредством исполнительного механизма (механизмов) (т.е., создавая больший или меньший 'изгиб' в устройстве), и направлением можно управлять, выбирая один или более исполнительных механизмов на одной стороне устройства так, чтобы сила действовала асимметрично для создания требуемого 'изгиба' в выбранном направлении.
Альтернативно (или в дополнение) применяют одну или более вставок управления направлением движения бурового долота так, что они выдвигаются от торца бурового долота на части поворота бурового долота, и убираются во время остальной части поворота. Таким образом, удлинение возникает только для выбранного угла поворота бурового долота так, что вставка должна контактировать только с выбранным участком плоскости забоя, который контактирует с буровым долотом. Таким образом, плоскость забоя бурится предпочтительно на выбранной точке контакта с вставкой. Бурильная компоновка и ствол скважины тогда поворачивается в направлении предпочтительного бурения.
Преимущество обеих данных систем состоит в том, что они обеспечивают управление направлением движения в любом направлении без оснащения специальными инструментами и без сложных гидравлических забойных двигателей. Кроме того, они обе обеспечивают гораздо более точный контроль и могут отключаться от долота легко и быстро, при отключении, обеспечивая возобновление прямого бурения. Доступ ко всему 3 х мерному пространству на забое скважины становится возможным, благодаря экономичному и эффективному способу. Электронный механизм обратной связи и компьютерная технология управления могут содействовать устройству в достижении высокой степени контроля точности, которая возможна при использовании данной системы.
Настоящее изобретение дополнительно обеспечивает способ бурения, содержащий применение устройства, определенного выше. Обычно, настоящий способ содержит применение одного или более исполнительных механизмов управления направлением движения для обеспечения требуемого изменения в направлении бурения, и/или применение одной или более вставок управления направлением движения для обеспечения требуемого изменения в направлении бурения.
Принципы настоящего изобретения можно лучше всего понять из следующих примеров. Следует заметить, что примеры никоим образом не ограничивают изобретения. Объем настоящего изобретения ограничен только приведенной ниже формулой изобретения, в объеме которой изобретение может быть модифицировано.
ПРИМЕР
Механический возбудитель - подтверждение концепции
Для подтверждения правильности концепции была создана конечноэлементная (FE) модель. Модель имеет четыре основных компонента, верхнее кольцо с синусоидальными канавками [вращающийся элемент (1)], обойму с шариками [одним или более подшипниками (3)], нижнее кольцо (стандартное подшипниковое кольцо) [базовый элемент (2)] и сжимающую пружину для удержания данных трех компонентов вместе. Данное показано на фиг. 20, где применены 16 шариков. На фиг. 21 показаны временные FE диаграммы результатов, вычисленных для 50 рад/с. На фиг. 21(a) показана угловая скорость верхнего кольца [черная верхняя линия (T)], которая была установлена на 50 рад/с, и вычисленная угловая скорость нижнего кольца [синяя нижняя линия (B)]. Аксиальное смещение верхнего кольца показано на фиг. 21(b). Данный пример ясно подтверждает концепцию механического устройства возбуждения и его функциональных возможностей преобразования вращения в аксиальное перемещение.
Экспериментальные результаты
Был построен прототип механического устройства возбуждения, показанный на фиг. 22, и было проведено несколько экспериментов. Указаны вал (35), коллектор (36) перемещения, контроллер (37) предварительного нагружения и фиксатор (38) обоймы подшипника. Механическое устройство возбуждения приводится в действие двигателем, и силовой измерительный преобразователь установлен внутри модуля для обеспечения предварительного нагружения. Вихретоковые датчики установлены вблизи коллектора перемещения для измерения его смещения. Внизу под устройством возбуждения установлен 4D динамометр, в основном, для измерения реактивного крутящего момента. Данные отбираются с указанных датчиков через систему сбора данных (DAQ), и затем применяется фильтрация шума и сглаживание данных.
Экспериментальная временная диаграмма аксиального смещения коллектора перемещения для номинальной скорости 650 об/мин показана на фиг. 23. Частота возбуждения, генерируемая механическим устройством возбуждения оценивается посредством быстрого преобразования Фурье (БПФ) для измеренного аксиального смещения и является необычайно близким к прогнозируемой величине вычисленной по числу оборотов в минуту вала и числу шариков, т.e. 619/60*16=165 Гц. В Таблице 1 приведены номинальные скорости вращения, измеренные частоты аксиального перемещения, скорости вращения, смещения от пика до пика, предварительное нагружение и значение от пика до пика измеренной силы для ряда экспериментов с предварительным нагружением 3 кН. На фиг. 24 показано среднеквадратичное значение (RMS) мощности, требуемой для поддержания вращения снабженного канавками диска для разных величин предварительного нагружения, а также линейная экстраполяция для более высокого предварительного нагружения. На данной фигуре нижняя линия (X), средняя линия (Y) и верхняя линия (Z) представляют средний крутящий момент для 500, 700 и 2250 об/мин, соответственно.
Таблица 1: Экспериментальные результаты испытания механического измерительного преобразователя с предварительным нагружением 3 кН.
Хотя данное изобретение показано и описано для предпочтительных вариантов осуществления, специалисту в данной области техники понятно, что различные изменения в форме и деталях могут быть выполнены без отхода от объема изобретения, определяемого прилагаемой формулой изобретения.
Группа изобретений относится к области резонансно-усиленного бурения. Приспособление для преобразования вращательного движения в колебательное аксиальное движение содержит вращающийся элемент, базовый элемент и один или более подшипников для обеспечения вращательного движения вращающегося элемента относительно базового элемента. Вращающийся элемент и/или базовый элемент содержат один или более поднятых участков и/или один или более опущенных участков, по которым один или более подшипников проходят для периодического увеличения и уменьшения аксиального расстояния между вращающимся элементом и базовым элементом, когда происходит вращение, тем самым придается колебательное аксиальное движение вращающемуся элементу относительно базового элемента. Один или более подшипников представляет собой подшипник качения. Поднятые и/или опущенные участки выполнены в виде плавных изменений в толщине вращающегося элемента и/или базового элемента. Поднятые и/или опущенные участки выполнены в виде дорожки качения или канавки, выполненной во вращающемся элементе и/или в базовом элементе, при этом дорожка качения или канавка выполнена с возможностью удерживания одного или более подшипников. Обеспечивается увеличение эффективности бурения, увеличение скорости бурения, а также стабильности и качества ствола скважины, с ограничением эксплуатационного износа устройства для увеличения его эксплуатационного ресурса, а также более точное управление резонансно-усиленным бурением, в особенности, при бурении через горные породы быстро меняющихся типов. 6 н. и 50 з.п. ф-лы, 24 ил., 1 табл.
1. Приспособление для преобразования вращательного движения в колебательное аксиальное движение, содержащее:
(a) вращающийся элемент (1);
(b) базовый элемент (2); и
(c) один или более подшипников (3) для обеспечения вращательного движения вращающегося элемента относительно базового элемента;
при этом вращающийся элемент и/или базовый элемент содержат один или более поднятых участков (4) и/или один или более опущенных участков (5), по которым один или более подшипников (3) проходят для периодического увеличения и уменьшения аксиального расстояния между вращающимся элементом (1) и базовым элементом (2), когда происходит вращение, тем самым придается колебательное аксиальное движение вращающемуся элементу (1) относительно базового элемента (2),
причем один или более подшипников представляет собой подшипник качения,
причем поднятые и/или опущенные участки выполнены в виде плавных изменений в толщине вращающегося элемента и/или базового элемента; и
причем поднятые и/или опущенные участки выполнены в виде дорожки качения или канавки, выполненной во вращающемся элементе и/или в базовом элементе, при этом дорожка качения или канавка выполнена с возможностью удерживания одного или более подшипников.
2. Приспособление по п. 1, в котором один или более подшипников выбраны из следующего: шарикоподшипника, роликоподшипника и подшипника с бочкообразными роликами.
3. Приспособление по п. 1 или 2, в котором один или более подшипников представляет собой подшипник с бочкообразными роликами.
4. Приспособление по любому из предыдущих пунктов, в котором поднятые и/или опущенные участки имеют вид углублений и/или выпуклостей, выполненных во вращающемся элементе и/или в базовом элементе.
5. Приспособление по п. 4, в котором углубления и/или выпуклости имеют вид гребней и впадин, проходящих радиально от оси вращения вращающегося элемента и/или базового элемента.
6. Приспособление по любому из предыдущих пунктов, в котором один или более подшипников представляет собой роликоподшипник.
7. Приспособление по любому из предыдущих пунктов, в котором один или более подшипников представляет собой шарикоподшипник.
8. Приспособление по любому из предыдущих пунктов, в котором дорожка качения или канавка имеет тангенциальное сечение в форме дуги окружности.
9. Приспособление по любому из предыдущих пунктов, дополнительно содержащее пружину для сжатия вместе вращающегося элемента и базового элемента.
10. Исполнительный механизм для применения в модуле резонансно-усиленного бурения, содержащий приспособление по любому предыдущему пункту.
11. Исполнительный механизм по п. 10 для применения в модуле резонансно-усиленного бурения, содержащий:
первое приспособление по любому из пп. 1-9, причем первое приспособление имеет первое количество подшипников, и
второе приспособление по любому из пп. 1-9, причем второй блок имеет второе количество подшипников,
при этом первое количество и второе количество не равны.
12. Устройство для применения в резонансно-усиленном вращательном бурении, содержащее приспособление или исполнительный механизм по любому предыдущему пункту.
13. Устройство по п. 12, которое содержит:
(i) датчик для измерения статической нагрузки или для мониторинга прочности на сжатие материала, в котором осуществляют бурение;
(ii) виброизоляционный блок;
(iii) приспособление или исполнительный механизм по любому из пп. 1-9, для приложения аксиальной колебательной нагрузки на долото вращательного бурения;
(iv) датчик для измерения динамической аксиальной нагрузки или для мониторинга прочности на сжатие материала, в котором осуществляют бурение;
(v) присоединительное устройство бурового долота; и
(vi) буровое долото,
при этом датчик (i) предпочтительно установлен выше виброизоляционного блока, и датчик (iv) предпочтительно установлен между приспособлением или исполнительным механизмом (iii) и присоединительным устройством (v) бурового долота, при этом датчики соединены с контроллером для обеспечения на забое в скважине управления с обратной связью в режиме реального времени приспособлением или исполнительным механизмом (iii).
14. Устройство по п. 13, в котором датчик (i) и/или датчик (iv) представляет собой датчик нагрузки.
15. Устройство по п. 13 или 14, дополнительно содержащее блок передачи вибрации между приспособлением или исполнительным механизмом (iii) и датчиком (iv).
16. Устройство по любому из пп. 13-15, в котором виброизоляционный блок и/или блок передачи вибрации содержит конструктивную пружину.
17. Устройство по любому из пп. 13-16, в котором контроллер выполнен с возможностью регулирования частоты (f) и динамической силы (Fd) приспособления или исполнительного механизма.
18. Устройство по любому из пп. 13-17, в котором возможно регулирование частоты (f) и динамической силы (Fd) приспособления или исполнительного механизма согласно измерениям датчика (предпочтительно датчика нагрузки), представляющим изменения в прочности (Us) на сжатие материала, в котором осуществляют бурение.
19. Устройство по любому из пп. 13-18 для применения в наклонно-направленном бурении, которое содержит:
(a) по меньшей мере один исполнительный механизм управления направлением движения, способный прикладывать продольную силу на буровом долоте для изменения направления бурения; и/или
(b) по меньшей мере одну вставку управления направлением движения бурового долота, способную выдвигаться и убираться для изменения режущих характеристик бурового долота и тем самым изменения направления бурения.
20. Устройство по п. 19, в котором исполнительный механизм управления направлением движения содержит пьезоэлектрический элемент для привода исполнительного механизма управления направлением движения, и/или вставка управления направлением движения бурового долота содержит пьезоэлектрический элемент для обеспечения выдвижения и убирания вставки управления направлением движения.
21. Устройство по п. 19 или 20, которое содержит множество исполнительных механизмов управления направлением движения, расположенных симметрично вокруг оси вращения бурового долота.
22. Устройство по любому из пп. 12-21, которое содержит одну или более вставок управления направлением движения, расположенных симметрично или асимметрично вокруг оси вращения бурового долота.
23. Устройство по п. 22, в котором ни одна из вставок управления направлением движения не расположена на оси вращения бурового долота.
24. Устройство по п. 22 или 23, в котором множество вставок управления направлением движения расположены вдоль одного или более радиусов бурового долота.
25. Устройство по любому из пп. 22-24, в котором одна или несколько вставок управления направлением движения расположены асимметрично вокруг оси вращения бурового долота, и симметрия устанавливается благодаря присутствию вставок, не управляющих направлением движения на других местах в буровом долоте.
26. Устройство по любому из пп. 12-25, которое содержит бурильный модуль, содержащий буровое долото, и приспособление или исполнительный механизм по любому из пп. 1-11, при этом устройство дополнительно содержит:
- датчик для измерения одного или более параметров, относящихся к взаимодействию бурового долота и материала, в котором осуществляют бурение; и
- датчик для измерения одного или более движений бурового долота.
27. Устройство по п. 26, в котором один или более параметров, относящихся к взаимодействию бурового долота и материала, в котором осуществляют бурение, содержат одну или более характеристик соударения бурового долота с материалом, в котором осуществляют бурение, и/или одну или более сил, возникающих между буровым долотом и материалом, в котором осуществляют бурение.
28. Устройство по п. 27, которое содержит акселерометр для измерения одной или более характеристик соударения бурового долота с материалом, в котором осуществляют бурение, и/или датчик нагрузки для измерения одной или более сил, возникающих между буровым долотом и материалом, в котором осуществляют бурение.
29. Устройство по любому из пп. 26-28, содержащее вихретоковый датчик для измерения одного или более движений бурового долота.
30. Устройство по любому из пп. 26-29, в котором бурильный модуль дополнительно содержит:
- блок усиления вибрации для передачи колебательной нагрузки на буровое долото; и
- виброизоляционный блок для уменьшения или предотвращения колебаний за пределами бурильного модуля.
31. Устройство по п. 30, в котором блок усиления вибрации содержит пружинную систему для передачи колебательной нагрузки на буровое долото и один или более ограничивающих крутящий момент блоков для уменьшения или исключения передачи крутящего момента вращения бурового долота на исполнительный механизм.
32. Устройство по любому из пп. 26-31, в котором бурильный модуль дополнительно содержит систему управления для регулирования одного или более параметров бурения бурильного модуля, при этом система управления использует информацию с датчиков для регулирования параметров бурения.
33. Устройство по п. 32, в котором система управления содержит:
(a) контроллер для определения одной или более характеристик материала, подлежащего бурению, и
(b) контроллер для определения одного или более параметров бурения для приложения к бурильному модулю;
и при этом один или более контроллеров используют информацию с одного или более датчиков.
34. Устройство по любому из пп. 26-33, в котором датчики выполнены с возможностью измерения одного или более из следующих параметров бурения:
(a) аксиальную силу, действующую от бурильного инструмента на материал, в котором осуществляют бурение - ʺосевую нагрузку на долотоʺ (WOB) или ʺстатическую силуʺ;
(b) быстродействие или скорость бурового долота и/или бурильного модуля - ʺскорость продвиженияʺ(ROP);
c) ускорение бурового долота и/или бурильного модуля;
(d) частоту колебаний бурового долота и/или бурильного модуля;
(e) амплитуду колебаний бурового долота и/или бурильного модуля;
(f) колебательную аксиальную силу воздействия бурильного инструмента на материал, в котором осуществляют бурение, - ʺдинамическую силуʺ;
(g) скорость вращения или частоту вращения бурильного инструмента;
(h) вращательную силу или крутящий момент бурильного инструмента;
(i) расход текучей среды; и
(j) относительное смещение бурового долота.
35. Устройство по любому из пп. 12-34, в котором частота (f) приспособления или исполнительного механизма регулируется для поддержания в диапазоне 100 Гц и выше, предпочтительно от 100 до 500 Гц.
36. Устройство по любому из пп. 12-35, в котором динамическая сила (Fd) регулируется для поддержания в диапазоне до 1000 кН, более предпочтительно от 40 до 500 кН, еще более предпочтительно от 50 до 300 кН.
37. Способ бурения, содержащий применение приспособления и исполнительного механизма или устройства по любому предыдущему пункту.
38. Способ управления буром резонансно-усиленного вращательного бурения, содержащим приспособление, исполнительный механизм или устройство по любому из пп. 1-36, причем способ включает:
регулирование частоты (f) приспособления или исполнительного механизма в буре резонансно-усиленного вращательного бурения, при этом частота (f) поддерживается в диапазоне:
(D2Us/(8000πAm)1/2 ≤ f ≤ Sf(D2Us/8000πAm))1/2,
где D - диаметр долота вращательного бурения,
Us - прочность на сжатие материала, в котором осуществляют бурение,
A - амплитуда колебаний, m - вибрирующая масса, и
Sf - коэффициент масштабирования больше 1; и
регулирование динамической силы (Fd) приспособления или исполнительного механизма в буре резонансно-усиленного вращательного бурения, при этом динамическая сила (Fd) поддерживается в диапазоне:
[(π/4)D2effUs] ≤ Fd ≤ SFd[(π/4)D2effUs],
где Deff - эффективный диаметр долота вращательного бурения,
Us - прочность на сжатие материала, в котором осуществляют бурение, и
SFd - коэффициент масштабирования больше 1,
при этом частоту (f) и динамическую силу (Fd) приспособления или исполнительного механизма регулируют с помощью мониторинга сигналов, представляющих прочность (Us) на сжатие материала, в котором осуществляют бурение, и корректировки частоты (f) и динамической силы (Fd) приспособления или исполнительного механизма с применением механизма с замкнутым контуром и обратной связью в режиме реального времени согласно изменениям прочности (Us) на сжатие материала, в котором осуществляют бурение.
39. Способ по п. 38, в котором Sf меньше 5, предпочтительно меньше 2, более предпочтительно меньше 1,5 и наиболее предпочтительно меньше 1,2.
40. Способ по п. 38 или 39, в котором SFd меньше 5, предпочтительно меньше 2, более предпочтительно меньше 1,5 и наиболее предпочтительно меньше 1,2.
41. Способ по любому из пп. 38-40, в котором Sf выбирается при условии:
f ≤ fr,
где fr - частота, соответствующая условиям пикового резонанса для материала, в котором осуществляют бурение.
42. Способ по п. 41, в котором Sf выбирается при условии:
f ≤ (fr - X),
где X является коэффициентом безопасности, обеспечивающим, что частота (f) не превышает частоты условий пикового резонанса на переходе между двумя отличающимися материалами, в которых осуществляют бурение.
43. Способ по п. 42, в котором X > fr/100, более предпочтительно X > fr/50, еще более предпочтительно X > fr/10.
44. Способ по любому из пп. 40-43, в котором:
Fd ≤ SFd [(π/4)D2effUs - Y],
где Y - коэффициент безопасности, обеспечивающий, что динамическая сила (Fd) не превышает предел, обуславливающий катастрофическое удлинение трещин на переходе между двумя отличающимися материалами, бурение которых осуществляется.
45. Способ по п. 44, в котором Y > SFd[(π/4)D2effUs]/100, более предпочтительно Y > SFd [(π/4)D2effUs]/50, еще более предпочтительно Y > SFd [(π/4)D2effUs]/10.
46. Способ по любому из пп. 42-45, в котором один или оба X и Y регулируют согласно прогнозируемым вариациям в прочности (Us) на сжатие материала, в котором осуществляют бурение, и скорости, с которой частота (f) и динамическая сила (Fd) могут быть изменены, когда обнаружено изменение в прочности (Us) на сжатие материала, в котором осуществляют бурение.
47. Способ по любому из пп. 37-46, который дополнительно содержит регулирование амплитуды колебаний приспособления или исполнительного механизма, подлежащей поддержанию в диапазоне от 0,5 до 10 мм, более предпочтительно от 1 до 5 мм.
48. Способ по любому из пп. 37-47, в котором частота (f) приспособления или исполнительного механизма регулируется для поддержания в диапазоне 100 Гц и выше, предпочтительно от 100 до 500 Гц.
49. Способ по любому из пп. 37-48, в котором динамическую силу (Fd) регулируют для поддержания в диапазоне до 1000 кН, более предпочтительно от 40 до 500 кН, еще более предпочтительно от 50 до 300 кН.
50. Способ управления буром резонансно-усиленного вращательного бурения, содержащим устройство по любому из пп. 26-34, содержит:
(a) использование одной или более начальных характеристик материала, в котором осуществляют бурение, и/или одного или более начальных параметров бурения для управления бурильным модулем;
(b) измерение одного или более текущих параметров бурения с применением датчиков для получения одного или более измеренных параметров бурения;
(c) использование одного или более измеренных параметров бурения для вычисления одной или более характеристик материала, в котором осуществляют бурение;
(d) использование одной или более вычисленных характеристик материала, в котором осуществляют бурение, и/или одного или более измеренных параметров бурения для вычисления одного или более вычисленных параметров бурения;
(e) опционно, применение одного или более вычисленных параметров бурения для бурильного модуля;
(f) опционно, повторение этапов (b), (c), (d) и (e).
51. Способ по п. 50, в котором на этапе (d) один или более вычисленных параметров бурения из предыдущей итерации процесса управления используют как дополнительный ввод данных для определения вычисленных параметров бурения.
52. Способ по п. 50 или 51, в котором параметры бурения содержат один или более из следующего:
(a) аксиальную силу воздействия бура на материал, в котором осуществляют бурение - ʺосевую нагрузку на долотоʺ (WOB) или ʺстатическую силуʺ;
(b) быстродействие или скорость прохождения бурового долота и/или бурильного модуля сквозь материал, в котором осуществляют бурение;
(c) ускорение бурового долота и/или бурильного модуля, проходящего сквозь материал, в котором осуществляют бурение;
(d) частоту колебаний бурового долота и/или бурильного модуля;
(e) амплитуду колебаний бурового долота и/или бурильного модуля;
(f) колебательную аксиальную силу воздействия бура на материал, в котором осуществляют бурение, - ʺдинамическую силуʺ;
(g) частоту оборотов или скорость вращения бура;
(h) вращающую силу или крутящий момент бура на материале, в котором осуществляют бурение;
(i) расход текучей среды; и
(j) относительное смещение бурового долота.
53. Способ по любому из пп. 50-52, в котором характеристики материала, в котором осуществляют бурение, содержат одно или более из следующего:
(a) прочность материала на сжатие;
(b) жесткость или расчетную жесткость материала;
(c) предел текучести материала;
(d) ударную прочность материала;
(e) усталостную прочность материала;
(f) прочность материала на растяжение;
(g) сдвиговую прочность материала;
(h) твердость материала;
(i) плотность материала;
(j) модуль Юнга материала; и
(k) коэффициент Пуассона материала.
54. Способ по любому из пп. 50-53, в котором одну или более начальных характеристик материала, в котором осуществляют бурение, на этапе (a) получают из эмпирической информации, предпочтительно, из базы данных.
55. Способ по любому из пп. 50-54, в котором один или более начальных параметров бурения на этапе (a) получают из эмпирической информации, предпочтительно, из базы данных.
56. Способ по любому из пп. 50-55, в котором одну или более вычисленных характеристик материала, в котором осуществляют бурение, на этапе (c) получают, применяя одну или более моделей, предпочтительно одну или более эмпирических моделей и/или одну или более математических моделей.
| Способ гидровихревой классификации микро-наночастиц и устройство для её осуществления | 2021 |
|
RU2770974C1 |
| Механизм преобразования вращательного движения в возвратно-поступательное - кулачковый механизм Ващука | 1983 |
|
SU1110971A1 |
| Пространственный кулачковый механизм | 1984 |
|
SU1252578A1 |
| Способ определения активности лизирующих ферментов | 1981 |
|
SU1041569A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

