Изобретение относится к стартер-генераторам с возможностью самодиагностики, в частности к электрогенераторам с бесконтактными датчиками скорости вращения и положения ротора, и может быть использовано для определения скорости вращения и положения ротора электрогенератора.
Известен вентильный электродвигатель с встроенными датчиками скорости и углового положения ротора [патент РФ №2188494, Н02K 29/14, 27.08.2002], содержащий тахометрическую обмотку, размещенную в пазах статора, и датчики углового положения ротора, причем ось симметрии каждой фазы тахометрической обмотки совпадает с осью симметрии соответствующей фазы якорной обмотки. Катушечные группы каждой фазы тахометрической обмотки соединены между собой, как и катушечные группы якорной обмотки. Каждая катушечная группа тахометрической обмотки состоит из четного числа последовательно-встречно соединенных между собой катушек, смещенных относительно друг друга на одно зубцовое деление статора и выполненных с шагом, равным нечетному числу зубцовых делений статора. В качестве датчиков углового положения ротора приняты датчики Холла.
Недостатками аналога являются ограниченные функциональные возможности, так как наличие полупроводниковых датчиков Холла не позволяют использовать данную систему при высоких температурах, и невысокая технологичность, обусловленная размещением тахометрических обмоток.
Известен также датчик положения ротора для вентильного электродвигателя [заявка РФ №93043818, G01B 7/004, 10.12.1995], который содержит корпус, направляющую втулку с размещенным в ней постоянным магнитом и закрепленным на ней кодовым диском, взаимодействующий со считывающим устройством, закрепленным в корпусе. Кодовый диск выполнен так, чтобы существовала однозначная зависимость между маркерными импульсами на выходе считывающего устройства и угловым положением балансируемого ротора.
Недостатком аналога является невысокая технологичность, обусловленная наличием кодового диска, который является внешним по отношению к двигателю.
Известен также индуктивный датчик положения ротора бесколлекторного двигателя постоянного тока [патент РФ №2176846, Н02K 29/06,10.12.2001], в котором в качестве чувствительного элемента используется параллельный резонансный LC контур, питаемый от генератора гармонических колебаний. Перемещение полюсов индуктора относительно катушек резонансного контура приводит к изменению частоты настройки контура.
Недостатками аналога являются сложность схемотехнического решения системы обработки информации с датчика, а также аналоговый выходной сигнал, что требует от цифровых систем управления наличие быстродействующего аналого-цифрового преобразователя.
Наиболее близким по технической сущности и достигаемому результату к заявляемому изобретению является стартер-генератор [патент РФ №2543076, F02M 11/04, 27.02.2015], в котором содержится вентильная электрическая машина с управляющим контроллером с датчиком положения ротора (датчики Холла), постоянные магниты, установленные на роторе и статор с обмотками.
Недостатками аналога являются ограниченные функциональные возможности, так как наличие полупроводниковых датчиков Холла не позволяют использовать данную систему при повышенных температурах
Задача изобретения - расширение функциональных возможностей определения положения ротора и определение его угловой скорости.
Технический результат заключается в повышении точности формирования непрерывной информации об угловом положении ротора относительно статора двигателей или генераторов с управляемой механической характеристикой, а также определение начального положения ротора электрических машин.
Поставленная задача решается, а технический результат достигается тем, что в стартере-генераторе, содержащем вентильную электрическую машину с управляющим контроллером, с датчиком положения ротора, постоянные магниты и статор с обмотками, согласно изобретению датчики положения ротора выполнены индуктивными, содержат генератор гармонических колебаний, соединенный с параллельным резонансным LC контуром, который в свою очередь связан с компаратором напряжения, выход которого соединен с D-триггером, который связан с компаратором цепи тактирования, подключенным к выходу генератора гармонических колебаний, частота работы которого на 20% выше точки максимума резонансной характеристики параллельного резонансного LC контура.
Самодиагностика осуществляется благодаря датчикам тока, установленным в каждую фазу интеллектуального стартер-генератора и контролирующим протекающий ток. В случае превышения тока выше допустимого значения автоматически включается в генераторном режиме, который обеспечивается индуктивными датчиками положения ротора.
Определение положения ротора основано на измерении напряжения на чувствительном элементе (резонансном LC контуре). На основании этого напряжения формируется выходное напряжение, соответствующее положению ротора в данный момент времени. Отличие от прототипа заключается в том, что параллельный резонансный LC контур настраивается таким образом, чтобы частота работы генератора гармонических колебаний была на 20% выше точки максимума резонансной характеристики, что обуславливается наличием компаратора напряжения и компаратора цепи тактирования, а также наличием D-триггера.
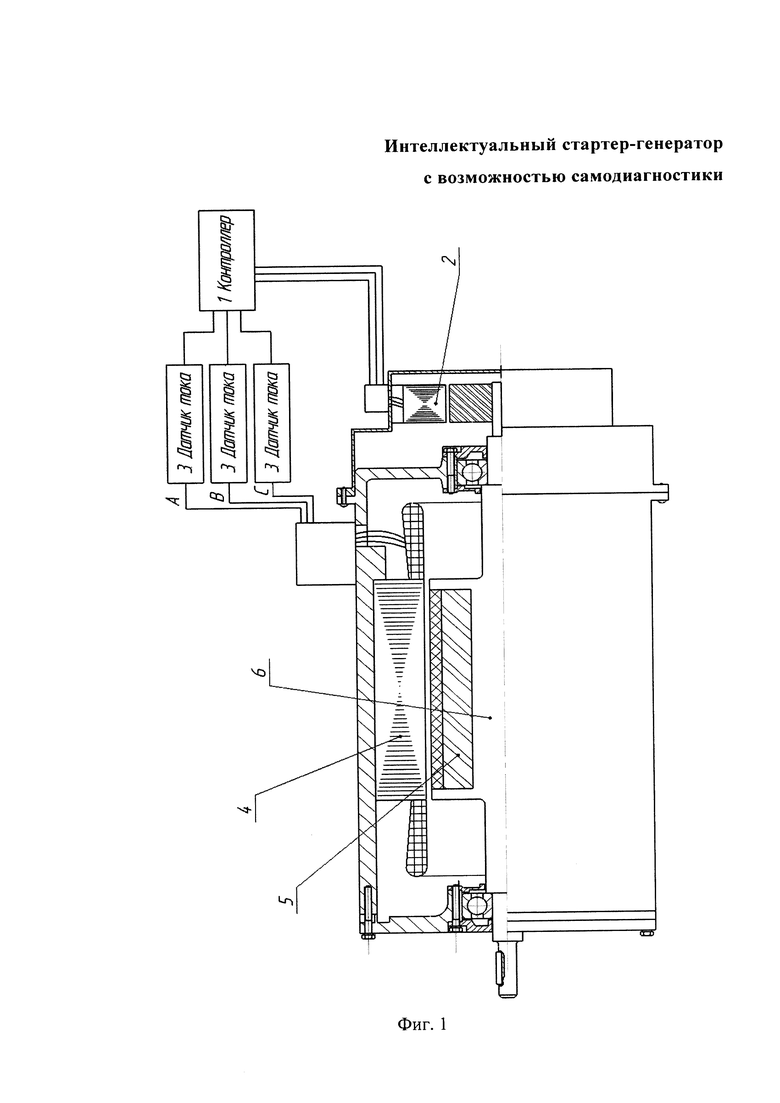
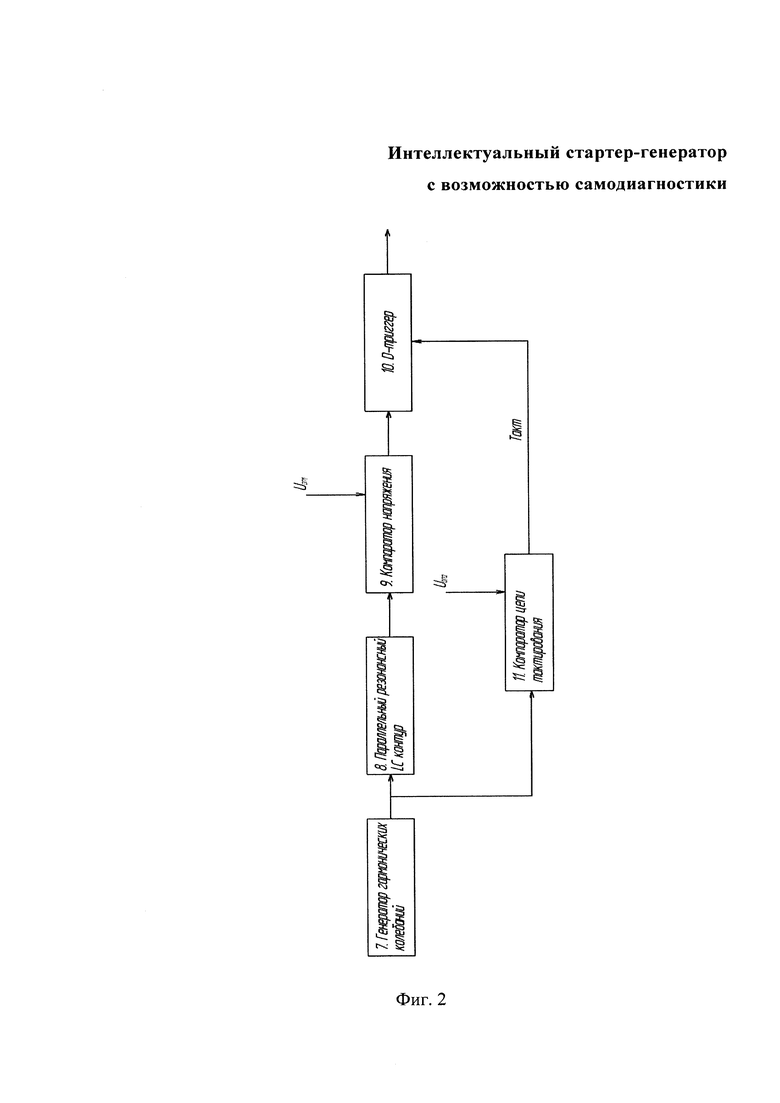
Существо изобретения поясняется чертежами, на фиг. 1 изображен интеллектуальный стартер-генератор с возможностью самодиагностики, на фиг. 2 изображена блок-схема индуктивного датчика положения ротора вентильной электрической машины.
Интеллектуальный стартер-генератор с возможностью самодиагностики состоит из контроллера 1 (фиг. 1), соединенного с индуктивными датчиками положения ротора 2. Число датчиков положения ротора зависит от количества фаз вентильной электрической машины, при трехфазной системе - три датчика положения ротора, при m-фазной системе - m датчиков положения ротора. Силовая часть контроллера 1 соединена с датчиками тока 3, которая в свою очередь соединена с обмотками статора 4. Постоянные магниты 5 жестко запрессованы в ротор 6. Индуктивные датчики положения ротора состоят из генератора гармонических колебаний 7 (фиг. 2), соединенного с параллельным резонансным LC контуром 8. Параллельный резонансный LC контур 8 связан с компаратором напряжения 9, выход которого соединен с D-триггером 10. Вход компаратора цепи тактирования 11 подключен к выходу генератора гармонических колебаний 7, а выход компаратора цепи тактирования 11 соединен с тактовым входом D-триггера 10.
Интеллектуальный стартер-генератор с возможностью самодиагностики работает следующим образом. Перемещение полюсов индуктора относительно катушек параллельного резонансного LC контура 8 приводит к изменению частоты настройки параллельного резонансного LC контура 8. Частота генератора гармонических колебаний 7 и частота настройки параллельного резонансного LC контура 8 смещены друг относительно друга таким образом, чтобы частота генератора гармонических колебаний 7 была на 20% выше точки максимума резонансной характеристики параллельного резонансного LC контура 8. Рабочая частота указанного генератора гармонических колебаний 7 выбирается таким образом, чтобы приращение величины индуктивности при воздействии ферромагнетика имело те же значения, что и уменьшение ее из-за воздействия диамагнитного проводящего материала. Таким образом, при воздействии ферромагнетика на параллельный резонансный LC контур 8, максимума резонансной характеристики добиваются не изменением несущей частоты генератора гармонических колебаний 7, а изменением индуктивности параллельного резонансного LC контура 8.
Далее выходной сигнал параллельного резонансного LC контура 8 подается на компаратор напряжения 9, где происходит сравнение выходного сигнала датчика с наперед заданным опорным напряжением UОП1. Величина опорного напряжения UОП1 выбирается таким образом, чтобы на выходе D-триггера 10 при отсутствии ферромагнетика выходное напряжение D-триггера 10 было равно нулю. После компаратора напряжения 9 прямоугольный сигнал поступает на вход D-триггера 10. Тактовые импульсы, поступающие на тактовый вход D-триггера 10, получают, используя компаратор цепи тактирования 11, устанавливаемый на выход генератора гармонических колебаний 7. К компаратору цепи тактирования 11 подводится опорное напряжение UОП2. Напряжение UОП2 подбирают таким образом, чтобы фронт импульса на выходе компаратора цепи тактирования 11 предшествовал выходному напряжению компаратора напряжения 9 при воздействии на параллельный резонансный LC контур 8 ферромагнитным телом.
Итак, заявляемое изобретение позволяет повысить точность формирования непрерывной информации об угловом положении ротора относительно статора двигателей или генераторов с управляемой механической характеристикой, а также существенно расширить функциональные возможности, повысить надежность за счет упрощения определения положения ротора относительно статора, а также упрощения электрической принципиальной схемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Стабилизированный вентильный электродвигатель | 1981 |
|
SU1007160A1 |
| МЕХАТРОННАЯ СИСТЕМА С ЧЕТЫРЕХФАЗНЫМ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2439769C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ | 2015 |
|
RU2602401C1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2003 |
|
RU2249123C1 |
| ТРЕХФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2482590C1 |
| СХЕМА ПОДКЛЮЧЕНИЯ МНОГОФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ К ИСТОЧНИКУ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2406217C1 |
| ТРЕХФАЗНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2482591C1 |
| МЕХАТРОННАЯ СИСТЕМА С ШЕСТИФАЗНЫМ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2426211C1 |
Изобретение относится к области электротехники и может быть использовано для определения скорости вращения и положения ротора электрогенератора, входящего в состав стартер-генератора с возможностью самодиагностики. Технический результат заключается в повышении точности формирования непрерывной информации об угловом положении ротора относительно статора двигателей или генераторов с управляемой механической характеристикой, а также определение начального положения ротора электрических машин. В интеллектуальном стартер-генераторе с возможностью самодиагностики в качестве датчика положения ротора использован резонансный параллельный LC контур, изменение амплитуды выходного сигнала датчика фиксируется измерительной системой, самодиагностика осуществляется благодаря датчикам тока, установленным в каждую фазу интеллектуального стартер-генератора и контролирующим протекающий ток. В случае превышения тока выше допустимого значения автоматически включается генераторном режим, который обеспечивается индуктивными датчиками положения ротора. 2 ил.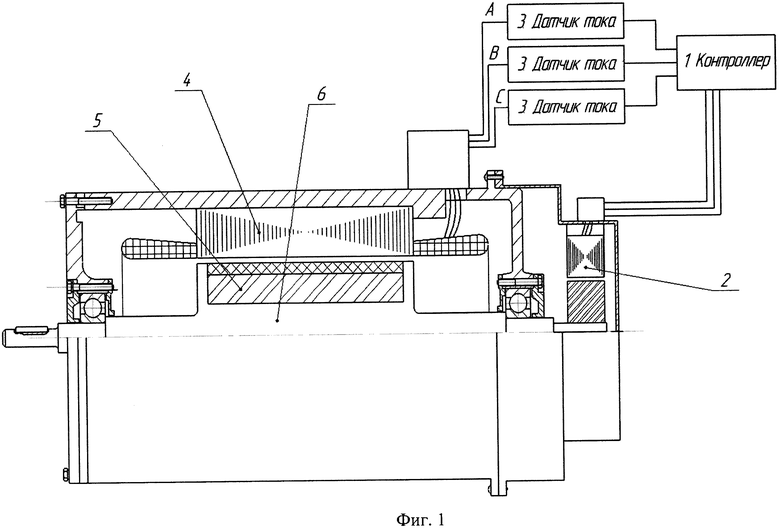
Стартер-генератор, содержащий вентильную электрическую машину с управляющим контроллером, с датчиком положения ротора, постоянные магниты и статор с обмотками, отличающийся тем, что датчики положения ротора выполнены индуктивными, содержат генератор гармонических колебаний, соединенный с параллельным резонансным LC контуром, который в свою очередь связан с компаратором напряжения, выход которого соединен с D-триггером, который связан с компаратором цепи тактирования, подключенным к выходу генератора гармонических колебаний, частота работы которого на 20% выше точки максимума резонансной характеристики параллельного резонансного LC контура.
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| СТАРТЕР-ГЕНЕРАТОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2010 |
|
RU2528950C2 |
| Гидравлическое уплотнение для водокольцевых насосов | 1959 |
|
SU134368A1 |
| US 6453863 B1, 24.09.2002 | |||
| US 20140139217 A1, 22.05.2014 | |||
| Система продувки энергетической установки | 1986 |
|
SU1344919A1 |

