Область техники, к которой относится изобретение
Настоящее изобретение относится к наполняющей машине, а более конкретно - к наполняющей машине для заполнения гибких упаковок типа пакета, каждая из которых имеет наполнительный канал и является по существу плоской в незаполненном состоянии упаковки.
Уровень техники
В настоящее время доступно много разных типов упаковки для жидкого содержимого.
Один тип упаковки представляет собой упаковку типа пакета и содержит две боковые стенки, которые являются гибкими и соединяются вдоль соединительной части, образуя камеру, объем которой зависит от взаимного положения стенок. Упаковка типа пакета может быть выполнена в виде стоячего пакета и может также содержать нижнюю стенку.
Упаковку такого типа можно использовать в качестве готовой (предварительно изготовленной) упаковки в наполняющей машине. Перед заполнением упаковка может находиться в плоском и запечатанном состоянии. Это позволяет стерилизовать камеру упаковки в процессе изготовления и, при сохранении стерильности, поставлять упаковки на наполняющее предприятие, например, молочный завод, для заполнения.
Предварительно изготовленная упаковка типа пакета может быть заполнена в наполняющей машине, предназначенной для продвижения упаковки боком через наполняющую машину, то есть упаковка перемещается в плоскости, в которой проходит незаполненная по существу плоская упаковка.
Различные операции наполняющей машины, например, продвижение упаковок, открытие наполнительных каналов упаковки, заполнение, укупорка - все это должно выполняться на высокой скорости, если наполняющая машина должна работать с высокой скоростью, при этом следует избегать эффекта «бутылочного горлышка».
Сущность изобретения
Ввиду вышеизложенного, целью настоящего изобретения является обеспечение усовершенствованной наполняющей машины для заполнения гибких упаковок типа пакета.
Также целью является обеспечение такой наполняющей машины с улучшенной производительностью.
Для достижения по меньшей мере одной из вышеуказанных целей, а также других целей, которые будут очевидны из последующего описания, в соответствии с настоящим изобретением обеспечена наполняющая машина, имеющая признаки, раскрытые в пункте 1 формулы изобретения.
Предпочтительные варианты осуществления наполняющей машины будут очевидны из зависимых пунктов формулы изобретения.
Более конкретно, в соответствии с настоящим изобретением обеспечена наполняющая машина для заполнения гибких упаковок типа пакета, каждая из которых имеет наполнительный канал и является по существу плоской в незаполненном состоянии упаковки. Наполняющая машина содержит транспортирующий узел, выполненный с возможностью прерывистого продвижения упаковок боком в направлении подачи от предшествующей по технологическому маршруту станции к последующей по технологическому маршруту станции через наполняющую станцию. Транспортирующий узел выполнен с возможностью возвратно-поступательного перемещения вдоль оси, параллельной направлению подачи, между первым конечным положением и вторым конечным положением. Транспортирующий узел содержит первый захватный элемент, который, когда транспортирующий узел находится в первом конечном положении, выполнен с возможностью взятия одной или более незаполненных упаковок из предшествующей станции и который, когда транспортирующий узел находится во втором конечном положении, выполнен с возможностью доставки одной или более незаполненных упаковок на наполняющую станцию. Транспортирующий узел содержит второй захватный элемент, который, когда транспортирующий узел находится в первом конечном положении, выполнен с возможностью взятия одной или более заполненных упаковок из наполняющей станции и который, когда транспортирующий узел находится во втором конечном положении, выполнен с возможностью доставки одной или более заполненных упаковок к последующей по технологическому маршруту станции. Транспортирующий узел содержит присосочный элемент, выполненный с возможностью открывать наполнительный канал одной или более незаполненных упаковок, взятых первым захватным элементом, во время перемещения транспортирующего узла из первого конечного положения во второе конечное положение, при этом присосочный элемент для каждой упаковки, взятой первым захватным элементом, содержит пару расположенных напротив друг друга присосок, которые выполнены с возможностью перемещения для сцепления с боковыми стеночными частями и для разделения указанных боковых стеночных частей, определяющих наполнительный канал соответствующей упаковки.
Термин «продвижение боком» упаковки следует понимать как перемещение упаковки в направлении, совпадающем с плоскостью, в которой упаковка проходит в по существу плоском незаполненном состоянии.
Таким образом, транспортирующий узел заявленной наполняющей машины обеспечивает возможность одновременного перемещения одной или более упаковок от предшествующей станции и наполняющей станции к наполняющей станции и последующей станции, соответственно. Таким образом, группы упаковок могут прерывисто продвигаться боком через наполняющую машину от одной станции к другой.
Наполняющая машина, естественно, может быть оснащена стационарными захватами, предназначенными для передачи упаковок, когда они берутся первым и вторым захватными элементами транспортирующего узла, и для взятия упаковок, доставленных первым и вторым захватными элементами транспортирующего узла.
Транспортирующий узел заявленной наполняющей машины изобретению содержит присосочный элемент, выполненный с возможностью открывания наполнительных каналов упаковок, когда они перемещаются от предшествующей станции к наполняющей станции. В результате упаковки, прибывающие на наполняющую станцию, находятся в состоянии, готовом для заполнения. Тот факт, что наполнительные каналы упаковок открывают во время перемещения от предшествующей станции к наполняющей станции, позволяет сократить время, в течение которого упаковки удерживаются неподвижно на соответствующей станции, и, таким образом, производственная мощность наполняющей машины может быть увеличена. Таким образом, шаг вставления наполнительных трубок наполняющей станции в наполнительные каналы упаковок может не требовать шага открывания наполнительных каналов.
Каждая присоска присосочного элемента может иметь ось, наклоненную на угол в диапазоне 1-10 градусов относительно горизонтальной плоскости. Ось может быть наклонена так, что поверхность сцепления присоски обращена наклонно вверх. Таким образом, разделение боковых стеночных частей, определяющих наполнительные каналы упаковок, может быть выполнено легче, когда противоположные пары присосок разделены, чтобы открыть наполнительные каналы.
Наполняющая машина может дополнительно содержать кулачковое устройство, содержащее первый кулачковый узел, связанный с первым и вторым захватными элементами, второй кулачковый узел, связанный с присосочным элементом, и кулачковый привод, перемещаемый вдоль продольной оси, параллельно направлению подачи, при этом работой первого и второго захватных элементов, а также присосочного элемента управляют путем смещения кулачкового привода вдоль продольной оси. Использование кулачкового устройства, имеющего кулачковый привод, взаимодействующий с первым кулачковым узлом, управляющим первым и вторым захватными элементами, а также со вторым кулачковым узлом, управляющим присосочным элементом, обеспечивает синхронизированную и точную работу.
Кулачковый привод может перемещаться с помощью линейного исполнительного механизма, содержащего серводвигатель. Использование серводвигателя обеспечивает точную работу с высокой скоростью.
Каждый из первого и второго захватных элементов транспортирующего узла может быть выполнен с возможностью параллельной обработки группы упаковок, состоящей из 2-6 упаковок. Параллельная обработка нескольких упаковок каждым из первого и второго захватного элемента позволяет повысить производительность.
Присоски присосочного элемента могут быть выполнены с возможностью сцепления с одной или более упаковками на расстоянии D в диапазоне 2-10 мм от верхнего края упаковок. Благодаря сцеплению присосочного элемента с упаковками на расстоянии от верхнего края, можно гарантировать доступ к верхнему краю каждой упаковки других средств, таких как узел 25 с зажимными губками для обеспечения на наполняющей станции заполнения без утечек, или узел с запечатывающими губками на станции запечатывания, которая может быть выполнено заодно с наполняющей станцией.
Первый и второй захватные элементы могут быть расположены на уровне, отдельном от уровня, на котором расположен присосочный элемент. Таким образом, можно гарантировать, что работа первого и второго захватных элементов не помешает работе присосочного элемента и наоборот.
Транспортирующий узел наполняющей машины может перемещаться возвратно-поступательно между первым и вторым конечным положением с помощью линейного исполнительного механизма, содержащего серводвигатель. Таким образом, можно обеспечить высокоскоростное перемещение с точностью позиционирования. Также использование серводвигателя облегчает работу в гигиенических условиях.
Как правило, все термины, используемые в формуле изобретения, следует интерпретировать в соответствии с их обычным значением в данной области техники, если в настоящем документе не указано иное. Все ссылки на элемент, устройство, компонент, средство, шаг и т.д. в единственном числе (артикли a, an, the в оригинальном документе на английском языке) должны толковаться открыто как относящиеся к по меньшей мере одному экземпляру указанного элемента, устройства, компонента, средства, шага и т.д., если явно не указано иное. Шаги любого способа, раскрытого в данном документе, не должны выполняться точно в раскрытом порядке, если явно не указано иное.
Краткое описание чертежей
Вышеуказанные, а также дополнительные цели, признаки и преимущества настоящего изобретения будут лучше поняты с нижеследующим иллюстративным и неограничивающим подробным раскрытием предпочтительных вариантов осуществления настоящего изобретения со ссылкой на прилагаемые чертежи, где одинаковые ссылочные позиции будут использоваться для аналогичных элементов, при этом:
На фиг. 1 представлен в аксонометрии схематический вид наполняющей машины в соответствии с настоящим изобретением.
На фиг. 2 представлен схематический вид сверху транспортирующего узла наполняющей машины в соответствии с настоящим изобретением.
На фиг. 3а-е представлены схематичные виды сверху, иллюстрирующие работу транспортирующего узла по фиг. 2.
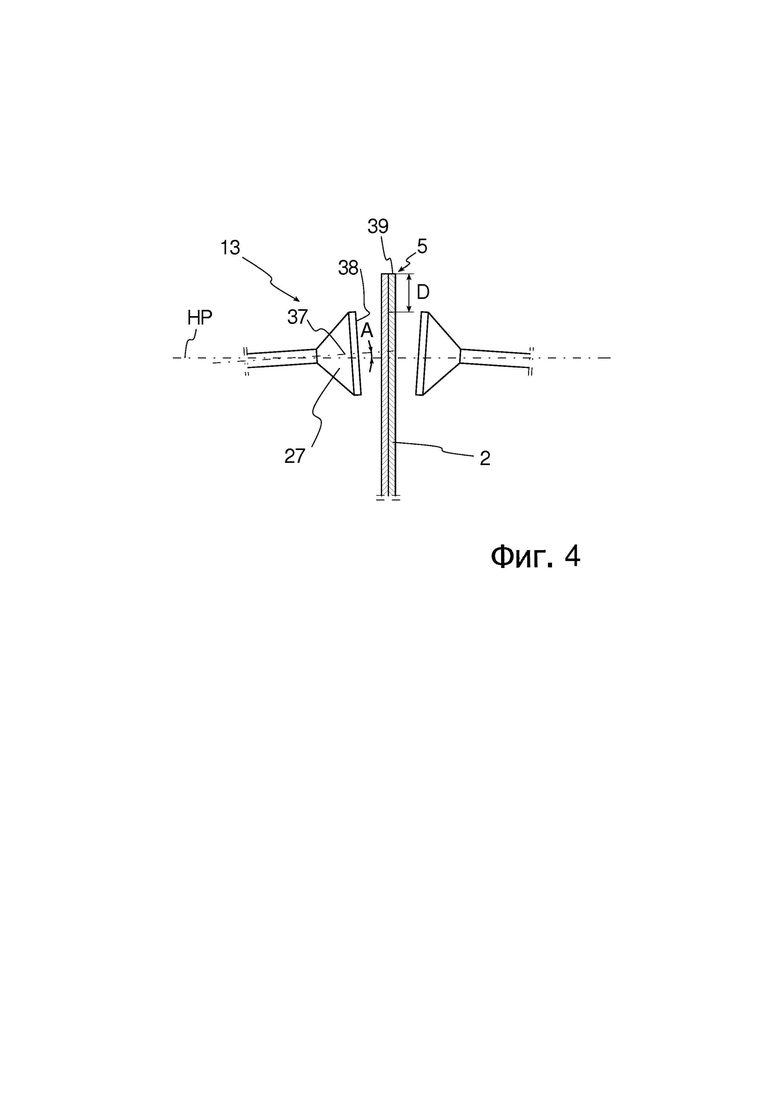
На фиг. 4 представлен схематический вид сбоку конфигурации пары противоположных присосок присосочного элемента транспортирующего узла в соответствии с настоящим изобретением.
Осуществление изобретения
Далее настоящее изобретение будет раскрыто более полно со ссылкой на прилагаемые чертежи, на которых представлены предпочтительные на текущий момент варианты осуществления изобретения. Однако изобретение может быть реализовано во многих различных формах и не должно рассматриваться как ограниченное изложенными здесь вариантами осуществления; вернее, эти варианты осуществления предоставлены для подробности и полноты, и полностью передают объем изобретения для специалиста в данной области.
Настоящее изобретение относится к наполняющей машине для заполнения гибких упаковок типа пакета.
Упаковки могут быть обеспечены в виде предварительно изготовленных упаковок, приспособленных для заполнения и запечатывания в наполняющей машине. Альтернативно, упаковки могут быть полностью или частично изготовлены в наполняющей машине.
Упаковки специально предназначены для продукции в виде жидких пищевых продуктов, таких как молочные продукты, например - молоко, вода, фруктовые напитки, сок или вино.
Упаковки могут быть любого требуемого объема.
Каждая упаковка содержит наполнительный канал, через который упаковку можно заполнить продуктом. В случае, если упаковка представляет собой предварительно изготовленную упаковку, наполнительный канал может быть запечатан торцевым уплотнением, которое необходимо удалить перед заполнением.
Каждая упаковка в своем простейшем виде содержит две гибкие противоположные стенки, также называется упаковкой типа пакет-подушка. Однако возможны другие конструкции, и упаковка может, например, содержать три гибкие стенки, две из которых образуют противоположные боковые стенки, а третья образует нижнюю стенку, то есть упаковка типа стоячий пакет-подушка.
Стенки могут быть соединены вдоль соединительной части для образования камеры для продукта. Стенки изготовлены из гибкого и податливого материала, что означает, что объем камеры для продукта зависит от относительного расстояния между стенками. Таким образом, объем камеры для продуктов напрямую зависит от степени заполнения упаковки. Другими словами, упаковка является сминаемой, также называемой упаковкой типа пакета.
Стенки упаковки в соединительной части предпочтительно соединены сваркой. Также возможны другие способы соединения, такие как склеивание.
Упаковки могут быть изготовлены из полотна гибкого упаковочного материала, который может быть многослойным пленочным материалом. Пленочный материал может содержать базовый слой наполнителя на минеральной основе и связующее из полиолефина. Понятно, что возможны также другие материалы и слои, такие как газонепроницаемый слой или светонепроницаемый слой. Пленочный материал также может быть прозрачным упаковочным материалом, то есть каждый из слоев, составляющих материал, является прозрачным.
Для преобразования полотна упаковочного материала в упаковки, полотно можно сложить в форме буквы М и затем подвергнуть операции запечатывания, чтобы получить полотно из взаимно соединенных упаковок. Полотно может быть намотано на рулон для подачи в наполняющую машину, при этом упаковки представляют собой предварительно изготовленные упаковки, то есть используются в качестве заготовок для заполнения содержимым.
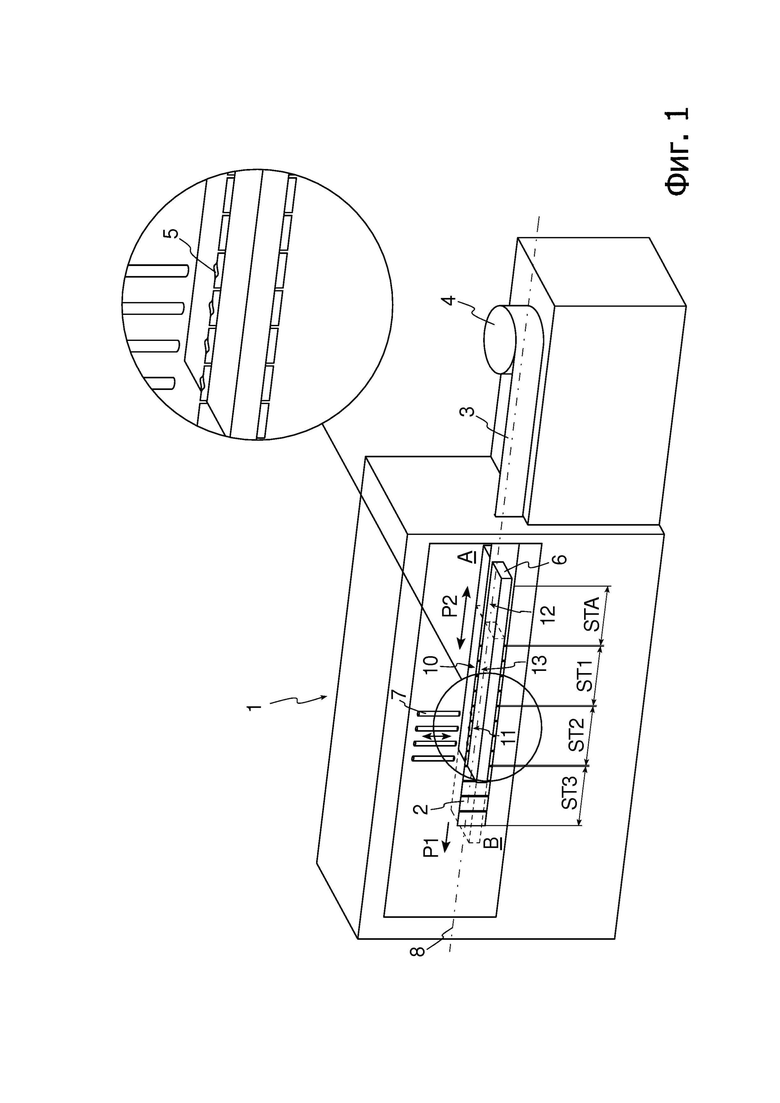
Обратимся к фиг. 1, где схематично проиллюстрирована наполняющая машина 1 в соответствии с настоящим изобретением.
Наполняющая машина 1 может быть выполнена с возможностью, как в показанном примере, заполнения гибких упаковок 2 типа пакета, обеспеченных во взаимно соединенном состоянии, образующем полотно 3, намотанное на рулон 4. Каждая упаковка 2 содержит наполнительный канал 5, который необходимо открыть, чтобы заполнить упаковку продуктом. Наполнительный канал 5 отчетливо виден в открытом состоянии на увеличенном фрагменте, показанном на фиг. 1.
Упаковки 2 до заполнения, то есть в незаполненном состоянии, являются по существу плоскими.
Наполняющая машина 1 в соответствии с настоящим изобретением содержит наполняющую станцию ST2, а также предшествующую станцию ST1, расположенную по технологическому маршруту перед наполняющей станцией ST2, и последующую станцию ST3, расположенную по технологическому маршруту после наполняющей станции ST2.
Могут быть дополнительные предшествующие и последующие станции.
Предшествующая станция ST1 может, например, представлять собой входную станцию или разделительную станцию, в которой отдельные упаковки 2 могут отделяться от полотна 3 взаимно соединенных упаковок. Конечно, также возможны другие виды предшествующих станций.
Последующая станция ST3 может, например, представлять собой запечатывающую станцию или выходную станцию, из которой могут выходить упаковки 2, например, переноситься на выходной конвейер. Конечно, также возможны другие виды последующих станций.
Наполняющая машина 1, показанная на фиг. 1, содержит предшествующую станцию ST1 в виде разделительной станции, наполняющую станцию ST2 и последующую станцию ST3 в виде выходной станции. Проиллюстрированная наполняющая машина 1 также содержит дополнительную предшествующую станцию STA, расположенную по технологическому маршруту до предшествующей станции ST1, и эта дополнительная предшествующая станция STA представляет собой входную станцию.
Наполняющая машина 1 в соответствии с настоящим изобретением дополнительно содержит транспортирующий узел 6 для проведения упаковок 2 через наполняющую машину 1. Более конкретно, транспортирующий узел 6 выполнен с возможностью прерывистого продвижения упаковок боком в направлении Р1 подачи.
То, что транспортирующий узел 6 выполнен с возможностью «продвижения боком» упаковок 2, означает, что транспортирующий узел 6 выполнен с возможностью продвижения упаковок в направлении, совпадающем с плоскостью, в которой каждая упаковка проходит в по существу плоском незаполненном состоянии.
Транспортирующий узел 6 выполнен с возможностью прерывистого продвижения боком упаковок 2 в направлении Р1 подачи от предшествующей станции ST1 к последующей станции ST3 через наполняющую станцию ST2. Если присутствуют дополнительные предшествующие и/или последующие станции, то транспортирующий узел также может быть выполнен с возможностью охвата этих дополнительных станций. Таким образом, в наполняющей машине 1, показанной на фиг. 1, транспортирующий узел 6 выполнен с возможностью перемещения упаковок 2 от дополнительной предшествующей станции STA к предшествующей станции ST1, от предшествующей станции ST1 к наполняющей станции ST2 и от наполняющей станции ST2 к последующей станции ST3.
Наполняющая станция ST2 наполняющей машины 1 по фиг. 1, содержит четыре наполнительных трубки 7, соединенные с непоказанным источником продукта. Таким образом, транспортирующий узел 6 в этом случае выполнен с возможностью обработки упаковок 2 в группах по четыре. Когда группа из четырех упаковок 2 поступает на наполняющую станцию ST2 и удерживается там неподвижно, при этом каждую наполнительную трубку 7 можно вставить в соответствующий наполнительный канал 5 упаковок 2, чтобы заполнить упаковки 2 продуктом.
В варианте осуществления, показанном на фиг. 1, последующая станция ST3 представляет собой выходную станцию, и, таким образом, наполняющая станция ST2 может в этом случае содержать запечатывающий элемент (не показан), предназначенный для запечатывания заполненных упаковок 2. Альтернативно, запечатывающий элемент может быть встроен в транспортирующий узел для запечатывания упаковок во время перемещения от наполняющей станции к последующей станции, или запечатывающий элемент может быть расположен на последующей станции.
Транспортирующий узел 6 выполнен с возможностью перемещения вдоль продольной оси 8, параллельной направлению Р1 подачи возвратно-поступательным образом, обозначенным двойной стрелкой Р2, между первым конечным положением А и вторым конечным положением В (обозначено пунктирными линиями). Для перемещения транспортирующего узла 6 предусмотрен приводной узел (не показан).
Транспортирующий узел 6 содержит первый захватный элемент 10 для продвижения упаковок 2 от предшествующей станции ST1 к наполняющей станции ST2. Более конкретно, первый захватный элемент 10 выполнен с возможностью взятия одной или более упаковок 2 из предшествующей станции ST1, когда транспортирующий узел 6 находится в первом конечном положении А; и доставки одой или более упаковок 2 на наполняющую станцию ST2, когда транспортирующий узел 6 находится во втором конечном положении В. Упаковки 2, взятые первым захватным элементом 10, являются пустыми, то есть незаполненными. В показанном варианте осуществления предшествующая станция ST1 представляет собой разделительную станцию для отделения отдельных упаковок 2 от полотна 3 взаимно соединенных упаковок, а первый захватный элемент 10, таким образом, выполнен с возможностью взятия упаковок 2 в разделенном состоянии.
Транспортирующий узел 6 дополнительно содержит второй захватный элемент 11 для продвижения упаковок от наполняющей станции ST2 к последующей станции ST3. Более конкретно, второй захватный элемент 11 выполнен с возможностью взятия одной или более упаковок 2 из наполняющей станции ST2, когда транспортирующий узел 6 находится в первом конечном положении А; и доставки одной или более упаковок 2 на последующую станцию ST3, когда транспортирующий узел 6 находится во втором конечном положении В. Упаковки 2, которые берет второй захватный элемент 11, заполнены, то есть в заполненном состоянии.
Как показано на фиг. 1, транспортирующий узел 6 также может содержать дополнительный захватный элемент 12 для продвижения упаковок 2 от дополнительной предшествующей станции STA к предшествующей станции ST1. Более конкретно, дополнительный захватный элемент 12 выполнен с возможностью взятия одной или более упаковок 2 из дополнительной предшествующей станции STA, представляющей собой входную станцию, когда транспортирующий узел 6 находится в первом конечном положении А; и доставки одной или более упаковок 2 на предшествующую станцию ST1, когда транспортирующий узел 6 находится во втором конечном положении В. Упаковки 2, взятые из дополнительной предшествующей станции STA, находятся во взаимно соединенном состоянии, образуя часть полотна 3, и таким образом, когда транспортирующий узел 6 перемещается из первого конечного положения А во второе конечное положение В, рулон 4, на который намотано полотно 3 взаимно соединенных упаковок, будет разматываться, и новая группа упаковок 2 будет продвигается к дополнительной предшествующей станции STA, заменяя упаковки, взятые дополнительным захватным элементом 12 транспортирующего узла 6.
Упаковки 2 удерживаются на соответствующих станциях с помощью стационарных захватов (не показаны). Все захватные элементы 10, 11, 12 транспортирующего узла выполнены с возможностью взаимодействия со стационарными захватами, расположенными на разных станциях, для передачи упаковок от стационарных захватов захватным элементам и наоборот.
Таким образом, когда транспортирующий узел 6 находится в первом конечном положении А, первый стационарный захват имеет возможность передачи упаковок 2, удерживаемых на предшествующей станции ST1, первому захватному элементу 10 транспортирующего узла 6; а второй стационарный захват может быть выполнен с возможностью передачи упаковок 2, удерживаемых на наполняющей станции ST2, второму захватному элементу 11 транспортирующего узла 6. Если наполняющая машина 1, как в примере, показанном на фиг. 1, содержит дополнительную предшествующую станцию STA, то можно установить дополнительный стационарный захват для передачи упаковок 2, удерживаемых на дополнительной предшествующей станции STA, дополнительному захватному элементу 12, когда транспортирующий узел 6 находится в первом конечном положении А.
Соответственно, когда транспортирующий узел 6 находится во втором конечном положении В, первый захватный элемент 10 транспортирующего узла 6 имеет возможность передачи упаковок, продвигаемых транспортирующим узлом 6, второму стационарному захвату, расположенному на наполняющей станции ST2; а второй захватный элемент 11 транспортирующего узла 6 может быть выполнен с возможностью передачи упаковок 2, продвигаемых транспортирующим узлом 6, третьему стационарному захвату, расположенному на последующей станции ST3. Если наполняющая машина 1, как в примере, показанном на фиг. 1, содержит дополнительную предшествующую станцию STA, то можно установить дополнительный захватный элемент 12 транспортирующего узла 6 для передачи упаковок, продвигаемых транспортирующим узлом 6, первым стационарным захватам, расположенным на предшествующей станции ST1, когда транспортирующий узел 6 находится во втором конечном положении В.
Как раскрывалось выше, транспортирующий узел 6 наполняющей машины 1, показанной на фиг. 1, выполнен с возможностью обработки упаковок 2 группами по четыре. Таким образом, каждый из захватных элементов 10, 11, 12 и стационарных захватов в этом случае выполнен с возможностью параллельной обработки четырех упаковок. Транспортирующий узел 6, естественно, может быть выполнен с возможностью обработки упаковок в группах с другим количеством. Группа может состоять из 2-6 упаковок.
Транспортирующий узел 6 дополнительно содержит присосочный элемент 13, выполненный с возможностью открывать наполнительный канал 5 каждой из одной или более упаковок 2 в незаполненном состоянии, взятых первым захватным элементом 10, когда транспортирующий узел 6 перемещается из первого конечного положения А во второе конечное положение В. Присосочный элемент 13 будет более подробно раскрыт ниже.
Таким образом, когда упаковки 2 доставят на наполняющую станцию ST2, наполнительный канал 5 каждой упаковки 2 уже будет открыт, и наполнительные трубки 7 наполняющей станции ST2 можно будет немедленно вставить в наполнительные каналы 5 для заполнения упаковок 2. Наполнительные трубки могут быть вставлены в упаковки за счет относительного движения между наполнительными трубками и упаковками.
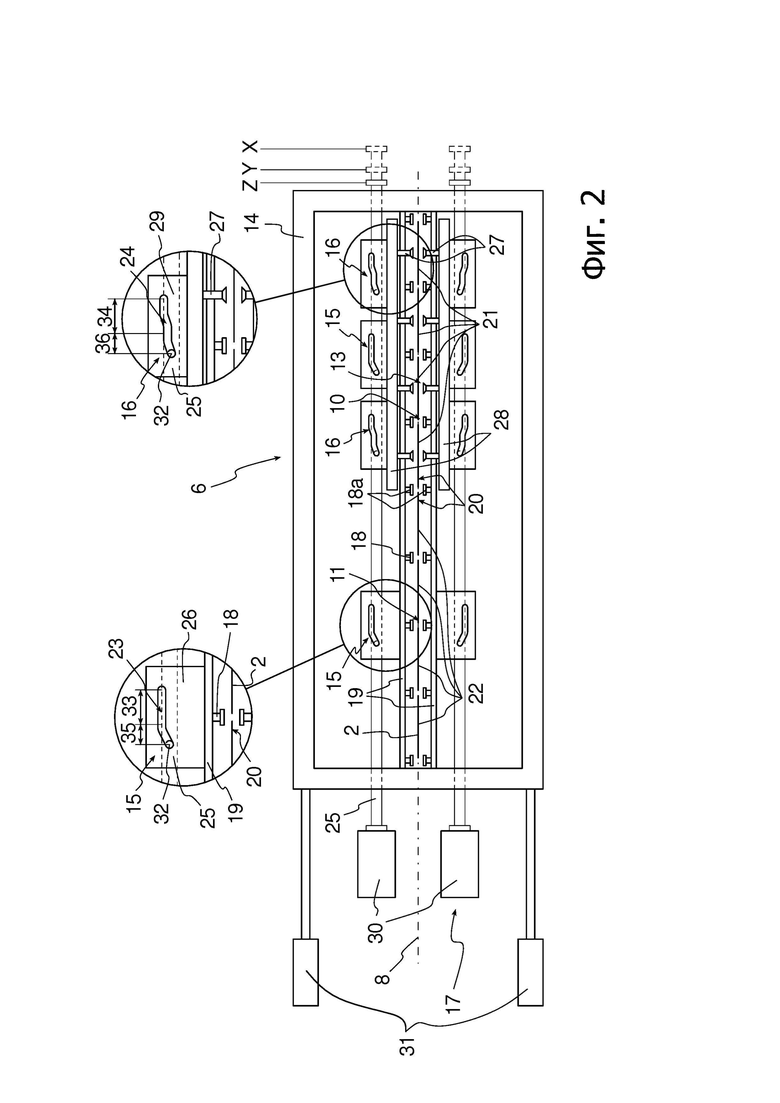
Обратимся теперь к фиг. 2, где схематично показан транспортирующий узел 6 для наполняющей машины 1 согласно настоящему изобретению.
Транспортирующий узел 6 содержит раму 14, поддерживающую первый 10 и второй 11 захватные элементы; и присосочный элемент 13. Транспортирующий узел 6 выполнен с возможностью возвратно-поступательного перемещения вдоль продольной оси 8, параллельной направлению подачи наполняющей машины, посредством приводного узла 31, связанного с рамой 14. Приводной узел 31 может содержать один линейный исполнительный механизм, или, как в показанном примере, два синхронизированных линейных исполнительных механизма.
Первый и второй захватные элементы 10, 11 связаны с первым кулачковым узлом 15, который связан с приводом 17 кулачка, выполненным с возможностью смещения вдоль оси, параллельной направлению Р1 подачи наполняющей машины 1. Работой захватных элементов 10 11 управляют путем смещением кулачкового привода 17.
Присосочный элемент 13 связан со вторым кулачковым узлом 16, который связан с кулачковым приводом 17, при этом работой присосочного элемента 13 управляют путем смещения кулачкового привода 17.
Захватные элементы 10, 11 могут содержать пары противоположных выступов 18, перемещающихся навстречу друг другу, чтобы захватывать упаковки 2.
Как показано на фиг. 2, пары противоположных выступов 18 могут поддерживаться первой парой штанг 19, проходящих параллельно на расстоянии друг от друга. Первая группа пар противоположных выступов 18 образует первый захватный элемент 10, а вторая группа противоположных выступов 18 образует второй захватный элемент 11.
При перемещении навстречу друг другу выступы 18 могут входить в зацепления с боковыми краевыми частями 20 упаковок 2, так что каждая пара противоположных выступов 18 захватывает задний боковой край 20 одной упаковки 2 и передний боковой край 20 соседней упаковки 2. Таким образом, пара противоположных выступов 18а, захватывающих последнюю упаковку 2 первой группы 21 упаковок, и первую упаковку 2 второй группы 22 упаковок, может образовывать часть как первого захватного элемента 10, так и второго захватного элемента 11.
Как указывалось выше, первый кулачковый узел 15 связан с первым и вторым захватными элементами 10, 11.
Первый кулачковый узел 15 может содержать первую кулачковую кривую 23; а кулачковый привод 17 может содержать смещаемый в осевом направлении поршень 25, связанный с первой кулачковой кривой 23.
Первая кулачковая кривая 23 первого кулачкового узла 15 может быть предусмотрена в пластине 26, прикрепленной к первому и второму захватным элементам 10, 11.
Первый кулачковый узел 15 может быть выполнен так, чтобы заставлять захватные элементы захватывать упаковки между одной подвижной и одной неподвижной частью или между двумя подвижными частями.
В варианте осуществления, показанном на фиг. 2, первый кулачковый узел 15 выполнен так, чтобы заставлять первый и второй захватные элементы 10, 11 захватывать упаковки 2 между двумя подвижными частями. Первый кулачковый узел 15 содержит четыре пластины 26, каждая из которых имеет первую кулачковую кривую 23 в виде канавки, выполненной в пластине 26. Две пластины 26 прикреплены на расстоянии друг от друга к одной штанге, входящей в первую пару штанг 19, а оставшиеся две пластины 26 прикреплены на расстоянии друг от друга к другой штанге, входящей в первую пару штанг 19.
Присосочный элемент 13 может содержать для каждой упаковки 2, которую берет первый захватный элемент 10, пару расположенных напротив друг друга присосок 27, которые выполнены с возможностью перемещения в поперечном направлении для сцепления с участками боковых стенок, образующих наполнительный канал 5 соответствующей упаковки 2, и их разделения.
Как показано на фиг. 2, пары противоположных присосок 27 могут поддерживаться второй парой штанг 28, проходящих параллельно на расстоянии друг от друга.
Как указывалось выше, второй кулачковый узел 16 связан с присосочным элементом 13.
Второй кулачковый узел может содержать вторую кулачковую кривую 24; а кулачковый привод 17 может содержать смещаемый в осевом направлении поршень 25, связанный со второй кулачковой кривой 24 второго кулачкового узла 16.
Вторая кулачковая кривая 24 второго кулачкового узла 16 может быть предусмотрена в пластине 29, прикрепленной к присосочному элементу 13.
Второй кулачковый узел 16 может быть выполнен так, чтобы заставлять присосочный элемент сцепляться с участками боковой стенки упаковки, определяющими наполнительный канал между одной подвижной и одной неподвижной частью или между двумя подвижными частями.
В варианте осуществления, показанном на фиг. 2, второй кулачковый узел 16 выполнен так, чтобы присосочный элемент 13 сцеплялся с упаковкой 2 между двумя подвижными частями. Второй кулачковый узел 16 содержит четыре пластины 29, каждая из которых имеет вторую кулачковую кривую 24 в виде канавки, выполненной в пластине 29. Две из пластин 29 прикреплены на расстоянии друг от друга к одной штанге, входящей во вторую пару штанг 28, а остальные две пластины 29 прикреплены на расстоянии друг от друга к другой штанге, входящей во вторую пару штанг 28.
В показанном варианте осуществления кулачковый привод 17 содержит два поршня 25, которые перемещаются синхронно вдоль продольной оси 8 посредством приводного узла 30. Приводной узел 30 может содержать один линейный исполнительный механизм или, как в показанном примере, два синхронизированных линейных исполнительных механизма.
Кулачковый привод выполнен с возможностью смещения параллельно продольной оси 8 между первым конечным положением X кулачка, промежуточным положением Y кулачка и вторым конечным положением Z кулачка.
Каждый поршень 25 несет четыре выступа 32, два из которых принимают первые кулачковые кривые 23 первого кулачкового узла 15, и два из которых принимают вторые кулачковые кривые 24 второго кулачкового узла 16. Таким образом, выступы 32 действуют как кулачковые следящие элементы, при этом осевое смещение кулачкового привода 17, то есть синхронное перемещение двух поршней 25, будет зависеть от соответствующей кулачковой кривой 23, 24, вызывая поперечное перемещение первого кулачкового узла 15 и второго кулачкового узла 16, и, таким образом, также первого и второго захватных элементов 10, 11, связанных с первым кулачковым узлом 15, и присосочного элемента 13, связанного со вторым кулачковым узлом 16. Таким образом, единственный кулачковый привод 17 используется для работы как первого и второго захватных элементов, так и присосочного элемента.
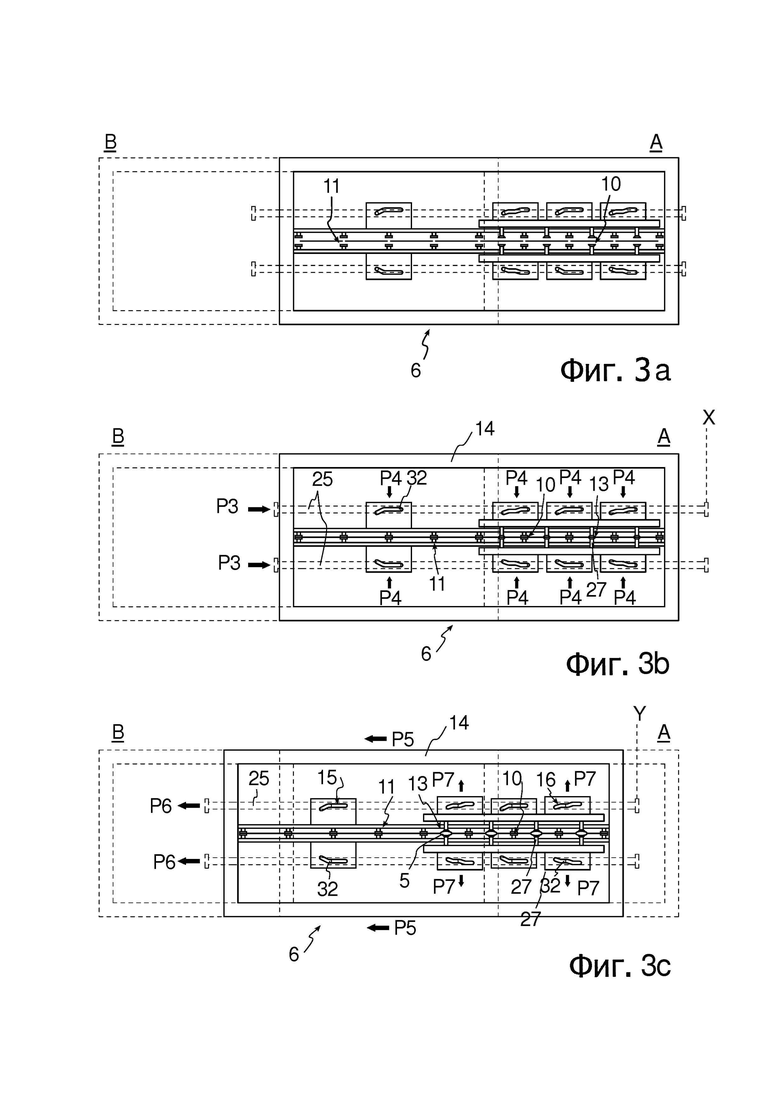
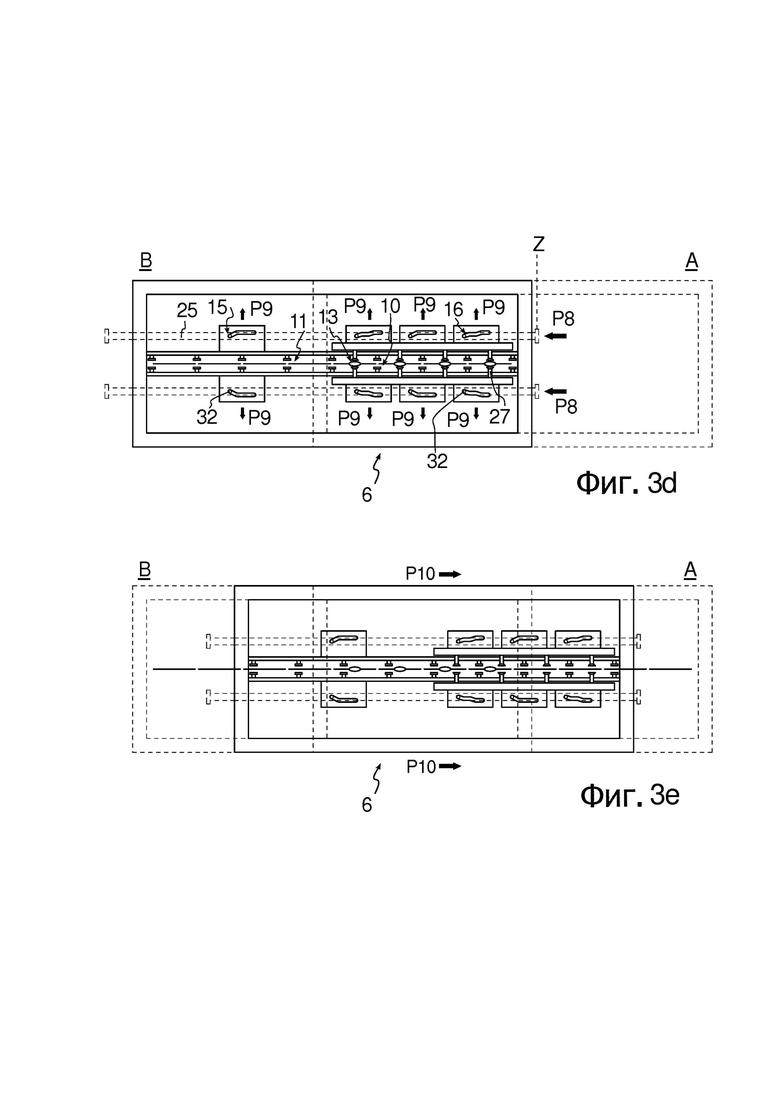
Функция транспортирующего узла 6 наполняющей машины 1 согласно изобретению теперь будет раскрыта более подробно со ссылкой на фиг. 3а-е, схематично иллюстрирующие транспортирующий узел 6 такого типа, как показано на фиг. 2.
На фиг. 3а транспортирующий узел 6 находится в первом конечном положении А. Первый и второй захватные элементы 10,11 находятся в разделенном положении, и первый захватный элемент 10 готов для захвата первой группы 21 упаковок, а второй захватный элемент 11 готов для захвата второй группы 22 упаковок. Группы упаковок соответствуют группам упаковок, показанным на фиг. 2. Таким образом, первый захватный элемент 10 может быть готов для захвата первой группы из четырех незаполненных упаковок, находящихся на предшествующей станции и удерживаемых первым стационарным захватом, а второй захватный элемент может быть готов для захвата второй группы из четырех заполненных упаковок, находящихся на наполняющей станции и удерживаемых вторым стационарным захватом.
На фиг. 3b кулачковый привод (не показан) активирован, и два поршня 25, таким образом, смещены в направлении, указанном стрелками Р3, в первое конечное положение X кулачка относительно рамы 14. Таким образом, выступы 32, находящиеся на поршнях 25, обеспечивают преобразование продольного перемещения поршней 25 в поперечное перемещение, указанное стрелками Р4, первого и второго захватных элементов 10, 11 и присосочного элемента 13. Таким образом, первый захватный элемент 10 будет захватывать первую группу 21 упаковок, а второй захватный элемент 11 будет захватывать вторую группу 22 упаковок. В то же время пары присосок 27 будут сцепляться с боковыми стеночными частями, определяющими наполнительные каналы первой группы 21 упаковок, берущихся первым захватным элементом 10, то есть упаковок, которые могут находиться на предшествующей станции наполняющей машины. Когда первый и второй захватные элементы 10, 11 захватят упаковки 2, стационарные захваты могут отпустить свой захват пакетов так, чтобы упаковки 2 были переданы транспортирующему узлу 6 и взяты им.
На фиг. 3 с транспортирующий узел перемещен в направлении, указанном стрелкой Р5 с помощью не показанного приводного узла из первого конечного положения А, обозначенного пунктирными линиями, во второе конечное положение В, также обозначенное пунктирными линиями. Кулачковый привод также был активирован смещением поршней 25 в направлении, указанном стрелками Р6, из первого конечного положения X кулачка в промежуточное положение Y кулачка. Первый кулачковый узел 15 выполнен так, что указанное смещение поршней 25 не вызывает ответного поперечного перемещения первого и второго захватных элементов 10, 11. Более конкретно, каждая первая кулачковая кривая 23 первого кулачкового узла 15 содержит прямой участок 33, показанный на фиг. 2, проходящим параллельно направлению Р6, в котором перемещаются поршни 25, и, следовательно, выступы 32, принимаемые первыми кулачковыми кривыми 23 первого кулачкового узла 15, не будут вызывать какого-либо поперечного перемещения первого кулачкового узла 15 и первого и второго захватных элементов 10, 11, связанных с ним, что означает что первый и второй захватные элементы 10, 11 будут сохранять свой захват первой и второй групп 21, 22 упаковок. Однако, второй кулачковый узел 16 выполнен так, чтобы смещением поршней 25 вызывалось ответное поперечное перемещение присосочного элемента 13. Более конкретно, каждая вторая кулачковая кривая 24 второго кулачкового узла 16 содержит первый изогнутый участок 34. (также указан на фиг. 2), при этом выступы 32, принимаемые вторыми кулачковыми кривыми 24 второго кулачкового узла 16, будут, таким образом, следовать этим первым изогнутым участкам 34 в ответ на смещение поршней 25 и сообщать поперечное перемещение в направлении, указанном стрелкой Р7, второго кулачкового узла 16 и связанного с ним присосочного элемента 13, что означает, что пары противоположных присосок 27 будут разделены и, как следствие, будут открыты наполнительные каналы первой группы 21 упаковок.
На фиг. 3d транспортирующий узел 6 находится во втором конечном положении В. Кулачковый привод также был активирован смещением поршней 25 в направлении, обозначенном стрелками Р8, из промежуточного положения Y кулачка во второе конечное положение Z кулачка. Первый и второй кулачковые узлы 15, 16 выполнены так, чтобы смещение поршней 25 из промежуточного положения Y кулачка ко второму конечному положению Z кулачка вызывало ответное поперечное перемещение первого и второго захватных элементов 10, 11 и присосочного элемента 13, чтобы первый и второй захватные элементы 10, 11 отпускали свой захват первой и второй групп 21, 22 упаковок, и пары противоположных присосок 27 присосочного элемента 13 далее были отделены и отсоединены от первой группы упаковок 21. Таким образом, первую группу 21 упаковок можно передать стационарным захватам, расположенным на наполняющей станции, и можно вставить наполнительные трубки в открытые наполнительные каналы; а вторую группу 22 упаковок можно передать стационарным захватам, расположенным на последующей станции.
Более конкретно, каждая первая кулачковая кривая 23 первого кулачкового узла 15 содержит изогнутый участок 35 (показанный на фиг. 2), и, таким образом, выступы 32, принятые первыми кулачковыми кривыми 23 первого кулачкового узла 15, в ответ на перемещение кулачкового привода 17 кулачка из промежуточного положения Y кулачка в конечное положение Z второго кулачка будут обеспечивать поперечное перемещение в направлениях, указанных стрелками Р9, первого кулачкового узла 15 и первого и второго захватных элементов 10, 11, связанных с ним, что означает, что первый и второй захватные элементы 10, 11 освободят захват первой и второй 30 групп 21, 22 упаковок. Каждая вторая кулачковая кривая 24 второго кулачкового узла 16 содержит второй изогнутый участок 36 (показанный на фиг. 2), при этом выступы 32, принятые вторыми кулачковыми кривыми 34 второго кулачкового узла 16, будут, таким образом, следовать этим вторым изогнутым участкам 36 в ответ на смещение поршней 25 из промежуточного положения Y кулачка в конечное положение Z второго кулачка и сообщать поперечное перемещение в направлении, указанном стрелками Р9 второго кулачкового узла 15 и связанного с ним присосочного элемента 13, что означает, что пары противоположных присосок 27 далее будут разделены, и, как следствие, пары противоположных присосок 27 отсоединятся от первой группы 21 упаковок.
На фиг. 3е транспортирующий узел 6 перемещается в направлении, указанном стрелкой Р10, из второго конечного положения В в первое конечное положение А, чтобы повторить цикл взятия и доставки упаковок 2. Как показано на фиг. 3е новая группа пакетов была подана вперед для ее взятия транспортирующим узлом 6.
Как отмечалось выше, кулачковый привод 17 смещается между первым концевым положением X кулачка и вторым концевым положением Y кулачка с помощью приводного узла 30. Приводной узел 30 для кулачкового привода 17 может быть гидравлическим, пневматическим, механическим или электрическим линейным исполнительным механизмом. Приводной узел 30 может быть линейным исполнительным механизмом, содержащим серводвигатель, при этом могут быть предусмотрены датчики для обеспечения обратной связи по положению для узла, управляющего серводвигателем. Использование серводвигателя обеспечивает работу первого и второго захватных элементов и присосочного элемента в гигиенических условиях, гарантируя точное управление скоростью и положением. Таким образом, наполняющая машина может работать в гигиенических условиях на высокой скорости.
Как отмечалось выше, транспортирующий узел 6 может перемещаться между первым конечным положением А и вторым конечным положением В посредством приводного узла 31. Приводной узел 31 для транспортирующего узла 6 может быть гидравлическим, пневматическим, механическим или электрическим линейным привод. Приводной узел 31 может быть линейным приводом, содержащим серводвигатель, при этом могут быть предусмотрены датчики для обеспечения обратной связи по положению для узла, управляющего серводвигателем. Использование серводвигателя обеспечивает возможность перемещения транспортирующего узла в гигиенических условиях, одновременно гарантируя точный контроль скорости и положения. Таким образом, наполняющая машина может работать в гигиенических условиях на высокой скорости.
Как отмечалось выше, присосочный элемент 13 содержит пары противоположных присосок 27. Присоски присосочного элемента могут быть расположены без наклона. Альтернативно, как показано на фиг. 4, присоска 27, входящая в такую пару противоположных присосок, может иметь ось 37, наклоненную на угол А в диапазоне 1-10 градусов относительно горизонтальной плоскости HP. Ось 37 присоски 27 может быть наклонена так, чтобы поверхность 38 сцепления присоски была обращена наклонно вверх. В результате, наполнительный канал 5 упаковки 2 можно будет легче открыть в ответ на разделение противоположных присосок 27.
Каждая пара присосок может быть выполнена с возможностью сцепления с верхней краевой частью упаковки. Альтернативно, каждая пара противоположных присосок может быть выполнена с возможностью сцепления с соответствующей упаковкой на расстоянии D от верхнего края 39 упаковки 2, что также показано на фиг. 4. Расстояние D может находиться в диапазоне 2-10. мм. Таким образом, верхний край 39 и смежная часть каждой упаковки 2 легко доступны, например, для зажимных губок во время заполнения и для запечатывающих губок во время запечатывания.
Первый и второй захватные элементы с одной стороны и присосочный элемент с другой стороны могут быть расположены на отдельных уровнях. Таким образом, перемещения первого и захватных элементов могут происходить в плоскости, отделенной от плоскости, в которой перемещаются присосочные элементы. Таким образом, можно избежать помех между захватными элементами и присосочным элементом.
Понятно, что настоящее изобретение не ограничено показанными вариантами осуществления. Следовательно, возможны несколько модификаций и изменений в пределах объема изобретения, которое, таким образом, определяется исключительно прилагаемой формулой изобретения.
Изобретение относится к упаковочному оборудованию. Наполняющая машина для заполнения гибких упаковок типа пакета, каждая из которых имеет наполнительный канал и является по существу плоской в незаполненном состоянии упаковки, содержит транспортирующий узел, выполненный с возможностью прерывистого продвижения упаковок боком в направлении подачи от предшествующей по технологическому маршруту станции к последующей по технологическому маршруту станции через наполняющую станцию. Транспортирующий узел выполнен с возможностью возвратно-поступательного перемещения вдоль оси, параллельной направлению подачи, между первым конечным положением и вторым конечным положением. Транспортирующий узел содержит первый захватный элемент, который выполнен с возможностью, когда транспортирующий узел находится в первом конечном положении, взятия одной или более незаполненных упаковок из предшествующей по технологическому маршруту станции, и который выполнен с возможностью, когда транспортирующий узел находится во втором конечном положении, доставки одной или более незаполненных упаковок на наполняющую станцию. Транспортирующий узел содержит второй захватный элемент, который выполнен с возможностью, когда транспортирующий узел находится в первом конечном положении, взятия одной или более заполненных упаковок из наполняющей станции, и который выполнен с возможностью, когда транспортирующий узел находится во втором конечном положении, доставки одной или более заполненных упаковок к последующей по технологическому маршруту станции. Транспортирующий узел содержит присосочный элемент, выполненный с возможностью открывать наполнительный канал одной или более незаполненных упаковок, взятых первым захватным элементом, во время перемещения транспортирующего узла из первого конечного положения во второе конечное положение. Присосочный элемент для каждой упаковки, взятой первым захватным элементом, содержит пару расположенных напротив друг друга присосок, которые выполнены с возможностью перемещения для сцепления с боковыми стеночными частями и для разделения указанных боковых стеночных частей, определяющих наполнительный канал соответствующей упаковки. Обеспечивается повышение производительности наполняющей машины. 8 з.п. ф-лы, 8 ил.
1. Наполняющая машина для заполнения гибких упаковок (2) типа пакета, каждая из которых имеет наполнительный канал (5) и является по существу плоской в незаполненном состоянии упаковки, причем данная наполнительная машина содержит
транспортирующий узел (6), выполненный с возможностью прерывистого продвижения упаковок (2) боком в направлении (Р1) подачи от предшествующей по технологическому маршруту станции (ST1) к последующей по технологическому маршруту станции (ST3) через наполняющую станцию (ST2),
указанный транспортирующий узел (6) выполнен с возможностью возвратно-поступательного перемещения вдоль оси (8), параллельной направлению (Р1) подачи, между первым конечным положением (А) и вторым конечным положением В,
указанный транспортирующий узел (6) содержит первый захватный элемент (10), который выполнен с возможностью, когда транспортирующий узел (6) находится в первом конечном положении (А), взятия одной или более незаполненных упаковок (2) из предшествующей по технологическому маршруту станции (ST1), и который выполнен с возможностью, когда транспортирующий узел (6) находится во втором конечном положении В, доставки одной или более незаполненных упаковок (2) на наполняющую станцию (ST2),
указанный транспортирующий узел (6) содержит второй захватный элемент (11), который выполнен с возможностью, когда транспортирующий узел (6) находится в первом конечном положении (А), взятия одной или более заполненных упаковок (2) из наполняющей станции (ST2), и который выполнен с возможностью, когда транспортирующий узел (6) находится во втором конечном положении (В), доставки одной или более заполненных упаковок (2) к последующей по технологическому маршруту станции (ST3),
указанный транспортирующий узел (6) содержит присосочный элемент (13), выполненный с возможностью открывать наполнительный канал (5) одной или более незаполненных упаковок (2), взятых первым захватным элементом (10), во время перемещения транспортирующего узла (6) из первого конечного положения (А) во второе конечное положение (В),
причем присосочный элемент (13) для каждой упаковки (2), взятой первым захватным элементом (10), содержит пару расположенных напротив друг друга присосок (27), которые выполнены с возможностью перемещения для сцепления с боковыми стеночными частями и для разделения указанных боковых стеночных частей, определяющих наполнительный канал (5) соответствующей упаковки (2).
2. Наполняющая машина по п. 1, в которой каждая присоска (27) имеет ось (37), наклоненную на угол (А) в диапазоне 2-10 градусов относительно горизонтальной плоскости HP.
3. Наполняющая машина по п. 2, в которой ось (37) каждой присоски (27) наклонена так, что поверхность сцепления (38) присоски (27) обращена наклонно вверх.
4. Наполняющая машина по любому из пп. 1-3, дополнительно содержащая кулачковое устройство, содержащее
первый кулачковый узел (15), связанный с первым и вторым захватными элементами (10, 11),
второй кулачковый узел (16), связанный с присосочным элементом (13), и
кулачковый привод (17), выполненный с возможностью перемещения вдоль продольной оси параллельно направлению (Р1) подачи,
причем обеспечена возможность управления работой первого и второго захватных элементов (10, 11), а также присосочного элемента (13) путем смещения кулачкового привода (17) вдоль продольной оси.
5. Наполняющая машина по п. 4, в которой кулачковый привод (17) выполнен с возможностью его перемещения с помощью линейного исполнительного механизма (30), содержащего серводвигатель.
6. Наполняющая машина по любому из пп. 1-5, в которой каждый из первого и второго захватных элементов (10, 11) выполнен с возможностью параллельной обработки группы (21; 22) упаковок (2), состоящей из 3-6 упаковок.
7. Наполняющая машина по любому из пп. 1-6, в которой присоски (27) присосочного элемента (13) выполнены с возможностью сцепления с одной или более упаковками (2) на расстоянии (D) в диапазоне 2-10 мм от верхнего края (39) упаковок (2).
8. Наполняющая машина по любому из пп. 1-7, в которой первый и второй захватные элементы (10, 11) расположены на уровне, отдельном от уровня, на котором расположен присосочный элемент (13).
9. Наполняющая машина по любому из пп. 1-8, в которой транспортирующий узел (6) выполнен с возможностью возвратно-поступательного перемещения между первым (А) и вторым (В) конечными положениями с помощью линейного исполнительного механизма (31), содержащего серводвигатель.
| СПОСОБ ПОЛУЧЕНИЯ БИМЕТАЛЛИЧЕСКОГО КАТАЛИЗАТОРА РУТЕНИЙ/ОЛОВО, БИМЕТАЛЛИЧЕСКИЙ КАТАЛИЗАТОР, ПОЛУЧЕННЫЙ ПО ЭТОМУ СПОСОБУ И СПОСОБ ПОЛУЧЕНИЯ АЛЬДЕГИДОВ И ИХ ПРОИЗВОДНЫХ | 1996 |
|
RU2174872C2 |
| EP 3067282 A1, 14.09.2016 | |||
| US 2011107730 A1, 12.05.2011 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОБРАБОТКИ УПАКОВОК ДЛЯ ЖИДКОСТЕЙ | 1994 |
|
RU2138426C1 |
| СПОСОБ ПОЛУЧЕНИЯ ГЕРМЕТИЧНОГО ДВУХСЛОЙНОГОПАКЕТА | 0 |
|
SU235966A1 |

