ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к схеме управления, которая управляет синхронным двигателем с постоянными магнитами (PMSM), используемым для приведения в действие барабана в стиральных машинах.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
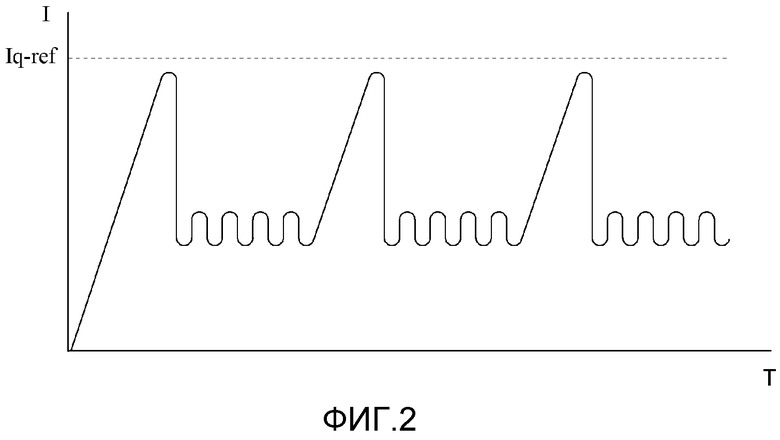
[0002] Синхронные двигатели с постоянными магнитами являются предпочтительными для приведения в действие барабана стиральной машины с переменными скоростями и в переменных направлениях на стадиях стирки и отжима, потому что они работают с высокой эффективностью и производительностью и без шума. Синхронные двигатели с постоянными магнитами имеют, в общем, трехфазную конфигурацию и приводятся в действие приводным способом, в котором фазные токи имеют синусоидальную форму волны. Для управления синхронными двигателями с постоянными магнитами необходимо знать положение ротора, вращающегося внутри статора, и скорость вращения относительно положения ротора. Согласно данным о положении ротора, крутящий момент в роторе образуется за счет подачи в нужное время энергии на статорные обмотки, и ротор используется для запуска и вращения с необходимой скоростью. В общем, датчики положения на эффекте Холла используются в электрических двигателях для того, чтобы определять положение ротора и скорость посредством обработки данных положения. При производстве электрического двигателя датчики положения вызывают увеличение трудозатрат и материалоемкости. Вследствие этого, в современном состоянии уровня техники для управления двигателем разработан способ управления с ориентацией по полю (FOC). Посредством способа управления с ориентацией по полю двигателем можно управлять без использования датчиков положения. Во время процесса стирки двигатель, приводящий в действие барабан стиральной машины, работает посредством создания запускающих и останавливающих движений. В способе управления с ориентацией по полю, для каждого запуска двигателя после остановки, подается ток постоянного момента (Iq-ref), который предварительно устанавливается в соответствии с максимальной нагрузкой независимо от загрузки белья в барабан (Фиг. 2). В процессе стирки в стиральной машине, если принимать в расчет, что двигатель останавливается и запускается 200-250 раз приблизительно при 20 секундных периодах в зависимости от программы стирки, в случае, когда величина нагрузки меньше, чем максимальная, в двигатель неоправданно подается избыточная величина тока за счет приложения максимального пускового тока при каждом пуске-останове, посредством этого энергопотребление повышается, а срок службы двигателя уменьшается вследствие перегрева при жестких запусках.
[0003] В Патенте US 7638959, объясняется схема управления, которая обеспечивает управление работой бесщеточного двигателя постоянного тока, имеющая инвертор, который инвертирует электрический ток в трехфазный ток, контроллер разомкнутого контура, который обеспечивает управление током двигателя с синусоидальной коммутацией посредством отправки сигналов обратной связи, и контроллер замкнутого контура, который обеспечивает управление током двигателя при высоких скоростях с шестистадийной коммутацией.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
[0004] Задачей настоящего изобретения является реализация схемы управления, которая управляет синхронным двигателем с постоянными магнитами, используемым для приведения в действие барабана в стиральных машинах, и которая обеспечивает сокращение энергопотребления.
[0005] Схема управления, реализуемая для решения этой задачи настоящего изобретения и объясняемая в формуле изобретения, используется для управления синхронным двигателем с постоянными магнитами, применяемым в стиральных машинах для приведения в действие барабана.
[0006] Микроконтроллер, включенный в схему управления и в который загружают данные, связанные с программой стирки, задействует двигатель барабана во время программы стирки посредством осуществления запускающих и останавливающих движений более чем в одном цикле, образованном из периодов запуска и рабочих периодов устойчивого состояния, в которых двигатель работает с постоянной скоростью, после каждого периода запуска.
[0007] Микроконтроллер подает ток на двигатель с величиной, которая может обеспечивать запуск при максимальной нагрузке в первоначальный период запуска первого цикла программы стирки, отслеживает и измеряет токи, которые изменяют значение в зависимости от нагрузки на барабан, вращаемый двигателем, в первом периоде устойчивого состояния после периода первоначального запуска, в котором двигатель работает с постоянной скоростью.
[0008] Микроконтроллер обеспечивает токи, подаваемые на двигатель, в значениях, равных или близких значениям, измеренным в периоды запуска всех циклов после первого цикла, в первоначальном периоде устойчивого состояния или в периоде устойчивого состояния предшествующего цикла перед каждым циклом, до конца программы стирки.
[0009] В варианте осуществления настоящего изобретения, двигателем управляют с помощью способа Управления с ориентацией по полю, а схема управления имеет контроллер разомкнутого контура, который управляет двигателем в периоды запуска, и контроллер замкнутого контура, который управляет двигателем в периоды эксплуатации в устойчивом состоянии.
[0010] Микроконтроллер измеряет фазные токи, подаваемые на двигатель посредством трехфазного инвертора, за счет разделения их на составляющую крутящего момента (Iq) и составляющую потока (Id).
[0011] Микроконтроллер, подает фазные токи, вычисленные согласно максимальной нагрузке на барабан стиральной машины, приводимый в действие двигателем, и имеющие опорную составляющую крутящего момента в первоначальный период запуска двигателя.
[0012] Микроконтроллер, подает составляющие крутящего момента на двигатель в значениях, равных или близких составляющей крутящего момента токов в первом периоде устойчивого состояния или в периоде устойчивого состояния цикла, предшествующего каждому циклу, в периоды запуска всех циклов после первого цикла до конца программы стирки посредством измерения составляющей крутящего момента фазных токов, подаваемых на двигатель в период устойчивого состояния первого цикла.
[0013] Микроконтроллер кроме того определяет моменты запуска во всех циклах после первого цикла, которые должны быть в прямой зависимости от величина пусковых составляющих крутящего момента до конца программы стирки.
[0014] Схема управления настоящего изобретения, подает ток устойчивого состояния, который определяется в первом цикле в зависимости от нагрузки на барабан, на двигатель в периоды запуска всех циклов после первого цикла в программе стирки стиральной машины, посредством этого предотвращаются тяжелые запуски двигателя и обеспечивается экономия энергии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Схема управления, реализованная для решения задачи настоящего изобретения проиллюстрирована на приложенных фигурах, на которых:
[0016] Фиг. 1 представляет схематичное изображение схемы управления двигателем.
[0017] Фиг. 2 представляет диаграмму изменения электрического тока (I) относительно времени (T), подаваемого на электрический двигатель, приводящий в действие барабан стиральной машины в программе стирки на существующем уровне техники.
[0018] Фиг. 3 представляет диаграмму изменения электрического тока (I) относительно времени (T), подаваемого на электрический двигатель, приводящий в действие барабан стиральной машины в программе стирки в варианте осуществления представленного изобретения.
[0019] Элементы, проиллюстрированные на Фигурах, пронумерованы следующим образом:
[0020] 1 - Схема управления
[0021] 2 - Преобразователь
[0022] 3 - Трехфазный инвертор
[0023] 4 - Блок оценки скорости и положения
[0024] 5 - Микроконтроллер
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
[0025] Схема (1) управления, которая управляет синхронным двигателем (M) с постоянными магнитами, используемым для приведения в действие барабана в стиральных машинах, содержит преобразователь (2), который преобразует напряжение сети переменного тока в напряжение постоянного тока, трехфазный инвертор (3), который инвертирует постоянный ток, получаемый от преобразователя (2), в трехфазный ток (Ia, Ib, Ic), блок (4) оценки скорости и положения, который определяет данные, связанные с положением и скоростью ротора, посредством датчиков напряжения в процессе запуска и работы двигателя (M) и микроконтроллер (5), который обеспечивает управление двигателем (M) за счет отправки синусоидальных переключающих сигналов в трехфазный инвертор (3) с сигналами, получаемыми от блока (4) оценки скорости и положения.
[0026] Схема (1) управления управляет двигателем (M) во время выполняемой программы стирки за счет осуществления более чем одного цикла (P1, P2, ...), образованного из периодов запуска (T-st1, Tst2, ...), в которых двигатель (M) медленно ускоряется подаваемым током, начиная с положения остановки, и периодов работы в устойчивом состоянии (T-ss1, T-ss2, ...) после каждого периода запуска (T-st1, Tst2, ...), в которых двигатель (M) работает с постоянной скоростью, установленной для процесса стирки. Схема (1) управления управляет двигателем (M) за счет осуществления приблизительно 200-250 циклов (P1, P2, ...) во время программы стирки, и двигатель (M) делает движения остановки-запуска в каждом цикле (P1, P2, ...).
[0027] Микроконтроллер (5) предоставляет трехфазный инвертор (3) для подачи тока на двигатель (M) с величиной, которая обеспечивает запуск с максимальной нагрузкой на барабан в первом периоде запуска (T-st1) первого цикла (P1), и в периоде устойчивого состояния (T-ss1) после первого периода запуска (T-st1), после чего двигатель (M) работает с постоянной скоростью, отслеживает и измеряет токи, которые изменяют величину (значение) в зависимости от нагрузки на барабан, приводимый в действие двигателем (M), а в периоде запуска (T-st2) второго цикла (P2) подает ток, который имеет значение, равное или близкое току, измеренному в первом периоде устойчивого состояния (T-ss1).
[0028] В варианте осуществления настоящего изобретения, микроконтроллер (5) обеспечивает токи, которые равны или близки по значению токам, измеренным в первом периоде устойчивого состояния (T-ss1), которые изменяются в зависимости от нагрузки на барабан, приводимый в действие двигателем (M), подаваемые на двигатель (M) в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1) до конца программы стирки.
[0029] В варианте осуществления настоящего изобретения, микроконтроллер (5) обеспечивает токи, которые равны или близки по значению токам, измеренным в периоды устойчивого состояния (T-ss1, T-ss2, ...) предшествующего цикла (P1, P2, ...), которые изменяются в зависимости от нагрузки на барабан, приводимый в действие двигателем (M), подаваемые на двигатель (M) в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1) до конца программы стирки.
[0030] В варианте осуществления настоящего изобретения, схема (1) управления управляет работой двигателя (M) методом управления с ориентацией по полю, при этом микроконтроллер (5) управляет работой двигателя (M) в периоды запуска (T-st1, Tst2, ...) за счет применения управления с разомкнутым контуром без приема сигналов обратной связи от двигателя (M) и управляет работой двигателя (M) в периоды устойчивого состояния (T-ss1, T-ss2, ...) за счет применения управления с замкнутым контуром с сигналами обратной связи, получаемыми от блока (4) оценки скорости и положения.
[0031] Микроконтроллер (5) измеряет фазные токи (Ia, Ib, Ic), подаваемые на двигатель (M) посредством трехфазного инвертора (3), за счет разделения их на составляющую крутящего момента (Iq) и составляющую потока (Id) и предоставляет фазные токи (Ia, Ib, Ic), имеющие составляющую крутящего момента (Iq) с максимальным значением и нулевую составляющую потока (Id), подаваемые на двигатель (M) посредством трехфазного инвертора (3) в зависимости от требуемого момента в программе стирки.
[0032] Составляющая потока (Id) обеспечивает ускорение двигателя (M), и во время стадии отжима стиральной машины, в которой используется двигатель (M), значение составляющей крутящего момента (Iq) тока уменьшается, а значение составляющей потока (Id) увеличивается. Вариант осуществления представленного изобретения применим для процесса стирки в стиральной машине, в котором требуется высокий крутящий момент при низкой скорости, а значения фазных токов (Ia, Ib, Ic), подаваемых на двигатель (M), увеличиваются/уменьшаются только за счет регулирования составляющих момента (Iq) фазных токов (Ia, Ib, Ic).
[0033] В варианте осуществления настоящего изобретения, микроконтроллер (5), в периоде запуска (T-st2) второго цикла (P2), обеспечивает составляющую крутящего момента (Iq-st2), подаваемую на двигатель (M), которая равна среднему значению составляющих крутящего момента (Iq-ss1), измеренных в период устойчивого состояния (Tss-1) первого цикла (P1), или приблизительно среднему значению указанной составляющей крутящего момента (Iq-ss1) посредством измерения составляющей крутящего момента (Iq) фазных токов (Ia, Ib, Ic), подаваемых на двигатель (M) в период устойчивого состояния (T-ss1) первого цикла (P1) (Фиг. 3).
[0034] В еще одном варианте осуществления настоящего изобретения, микроконтроллер (5) обеспечивает составляющие крутящего момента (Iq-st2, Iq-st3), подаваемые на двигатель (M), которые равны среднему значению составляющих крутящего момента (Iq-ss1), измеренных в период устойчивого состояния (Tss-1) первого цикла (P1), или приблизительно среднему значению указанной составляющей крутящего момента (Iq-ss1), в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1) (Фиг. 3).
[0035] В еще одном варианте осуществления настоящего изобретения, микроконтроллер (5) обеспечивает составляющие крутящего момента (Iq-st2, Iq-st3, ...), подаваемые на двигатель (M), которые равны среднему значению составляющих крутящего момента (Iq-ss1, Iq-ss2, ...), измеренных в периоды устойчивого состояния (T-ss1, T-ss2, ...) предшествующего цикла (P1, P2), или приблизительно среднему значению указанных составляющих крутящего момента (Iq-ss1, Iq-ss2, ...) в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1) до конца программы стирки.
[0036] Микроконтроллер (5) подает фазные токи (Ia, Ib, Ic), имеющие опорную составляющую крутящего момента (Iq-ref), и рассчитанные согласно максимальной нагрузке барабана, приводимого в действие двигателем (M) в первом периоде запуска (T-st1) двигателя (M), а после того как движение запуска выполнено и двигатель (M) достигает постоянной скорости, установленной для программы стирки, измеряет составляющую крутящего момента (Iq-ss1) фазных токов (Ia, Ib, Ic), подаваемых на двигатель (M) в период устойчивого состояния (T-ss1) первого цикла (P1). Микроконтроллер (5) обеспечивает подачу трехфазным инвертором (3) на двигатель (M) фазных токов (Ia, Ib, Ic), имеющих составляющие крутящего момента (Iq-st2, Iq-st3, ...), равные или близкие по значению составляющей крутящего момента (Iq-ss1) в период устойчивого состояния (T-ss1) первого цикла (P1) или составляющим крутящего момента (Iq-ss1, Iq-ss2, ...) в устойчивом состоянии предшествующего цикла (P1, P2..) перед каждым циклом (P2, P3, ...), в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, P4, ...) после первого цикла (P1) до конца программы стирки.
[0037] Микроконтроллер (5), кроме того, определяет, что длина продолжительностей запуска, другими словами периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, P4, ...) после первого цикла (P1), находилась в прямой зависимости от значений составляющих крутящего момента (Iq-st2, Iq-st3, ...), подаваемых согласно составляющей крутящего момента (Iq-ss1) в первом периоде устойчивого состояния (T-ss1) в конце программы стирки, выполняемой в стиральной машине, в которой используется двигатель (M). По мере того, как значение пусковых составляющих крутящего момента (Iq-st2, Iq-st3, ...) увеличивается, периоды запуска (T-st2, T-st3, ...) двигателя (M) в циклах (P2, P3, P4, ...) после первого цикла (P1) становятся длиннее, а по мере того, как значение пусковых составляющих крутящего момента (Iq-st2, Iq-st3, ...) уменьшается, периоды запуска (T-st2, T-st3, ...) двигателя (M) в циклах (P2, P3, P4, ...) после первого цикла (P1) уменьшаются.
[0038] Схема (1) управления настоящего изобретения подает пусковой ток максимального значения на двигатель (M) в период запуска (T-st1) первого цикла (P1) в программе стирки белья с величиной, которая может обеспечивать запуск в каждом состоянии нагрузки на барабан и подает токи в зависимости от нагрузки, установленной в период устойчивого состояния (T-ss1) первого цикла (P1) в периоды запуска (T-st2, T-st3, ...) циклов (P2, P3, P4, ...) после первого цикла (P1). За счет применения пусковых токов в зависимости от нагрузки на барабан предотвращаются тяжелые запуски и перегрев двигателя (M), и обеспечивается экономия энергии. В варианте осуществления представленного изобретения, пусковые токи подаются на двигатель (M) в зависимости от нагрузки на барабан только за счет создания изменений программного обеспечения в микроконтроллере (5), для управления током относительно нагрузки на барабан не требуется использование датчика массы и датчика ускорения.
[0039] Должно быть понятно, что настоящее изобретение не ограничено вариантами осуществления, обсуждавшимися выше, и квалифицированный специалист в данной области легко может внедрить различные варианты осуществления. Они должны рассматриваться в пределах объема правовых притязаний, раскрытого формулой представленного изобретения.

Изобретение относится к области электротехники и может быть использовано для приведения в действие стиральной машины. Технический результат - уменьшение энергопотребления. Схема (1) управления, которая управляет синхронным двигателем (M) с постоянными магнитами, используемым для приведения в действие барабана в стиральных машинах, содержит преобразователь (2), который преобразует напряжение сети переменного тока в напряжение постоянного тока, трехфазный инвертор (3), который инвертирует постоянный ток, получаемый от преобразователя (2), в трехфазный ток (Ia, Ib, Ic), блок (4) оценки скорости и положения, который определяет данные, связанные с положением и скоростью ротора, посредством датчиков напряжения во время запуска и работы двигателя (M), и микроконтроллер (5), который обеспечивает управление двигателем (M) за счет отправки синусоидальных переключающих сигналов в трехфазный инвертор (3) с сигналами, получаемыми от блока (4) оценки скорости и положения. 7 з.п. ф-лы, 3 ил.
1. Схема (1) управления, которая управляет синхронным двигателем (M) с постоянными магнитами, используемым для приведения в действие барабана в стиральных машинах, содержащая преобразователь (2), который преобразует напряжение сети переменного тока в напряжение постоянного тока, трехфазный инвертор (3), который инвертирует постоянный ток, получаемый от преобразователя (2), в трехфазный ток (Ia, Ib, Ic), блок (4) оценки скорости и положения, который определяет данные, связанные с положением и скоростью ротора во время запуска и работы двигателя (M), и микроконтроллер (5), который обеспечивает управление двигателем (M) за счет отправки синусоидальных переключающих сигналов в трехфазный инвертор (3) с сигналами, получаемыми от блока (4) оценки скорости и положения,
отличающаяся тем, что микроконтроллер (5),
- управляет двигателем (M) во время программы стирки за счет осуществления более чем одного цикла (P1, P2, ...), образованного из периодов запуска (T-st1, T-st2, ...) и периодов устойчивого состояния (T-ss1, T-ss2, ...), после каждого периода запуска (T-st1, T-st2, ...), при этом двигатель (M) работает с постоянной скоростью,
- подает ток на двигатель (M) с величиной, обеспечивающей запуск в состоянии максимальной нагрузки в первом периоде запуска (T-st1) первого цикла (P1),
- отслеживает и измеряет токи, которые изменяются по значению в зависимости от нагрузки на барабан, приводимый в действие двигателем (M) в первом периоде устойчивого состояния (T-ss1) после первого периода запуска (T-st1), при этом двигатель (M) работает с постоянной скоростью, и
- обеспечивает ток, подаваемый на двигатель (M) в период запуска (T-st2) второго цикла (P2), который равен или близок по значению токам, измеренным в первом периоде устойчивого состояния (T-ss1).
2. Схема (1) управления по п.1, отличающаяся тем, что микроконтроллер (5) обеспечивает токи, подаваемые на двигатель (M) в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1), которые равны или близки по значению токам, измеренным в первый период устойчивого состояния (T-ss1).
3. Схема (1) управления по п.1, отличающаяся тем, что микроконтроллер (5) обеспечивает токи, которые равны или близки по значению токам, измеренным в периоды устойчивого состояния (T-ss1, T-ss2, ...) предшествующего цикла (P1, P2, ...), подаваемые на двигатель (M) в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1).
4. Схема (1) управления по любому из пп.1-3, отличающаяся тем, что микроконтроллер (5) осуществляет управление с разомкнутым контуром в периоды запуска (T-st1, T-st2, ...) двигателя (M) и осуществляет управление с замкнутым контуром в периоды устойчивого состояния (T-ss1, T-ss2, ...) и измеряет фазные токи (Ia, Ib, Ic), подаваемые на двигатель (M) посредством трехфазного инвертора (3) за счет разделения их на составляющую крутящего момента (Iq) и составляющую потока (Id).
5. Схема (1) управления по п.4, отличающаяся тем, что микроконтроллер (5) подает фазные токи (Ia, Ib, Ic), вычисленные согласно максимальной нагрузке на барабан стиральной машины, приводимый в действие двигателем (M), и имеющие опорную составляющую крутящего момента (Iq-ref) в первом периоде запуска (T-st1) двигателя (M), измеряет составляющую крутящего момента (Iq-ss1) фазных токов (Ia, Ib, Ic), подаваемых на двигатель (M) в период устойчивого состояния (T-ss1) первого цикла (P1) и в период запуска (T-st2) второго цикла (P2), обеспечивает составляющую крутящего момента (Iq-st2), подаваемую на двигатель (M), которая равна или близка по значению составляющей крутящего момента (Iq-ss1) токов в период устойчивого состояния (T-ss1) первого цикла (P1).
6. Схема (1) управления по п.5, отличающаяся тем, что микроконтроллер (5) обеспечивает составляющие крутящего момента (Iq-st2, Iq-st3), подаваемые на двигатель (M), которые равны или близки по значению составляющим крутящего момента (Iq-ss1), измеренным в период устойчивого состояния (T-ss1) первого цикла (P1), в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1).
7. Схема (1) управления по п.5, отличающаяся тем, что микроконтроллер (5) обеспечивает составляющие крутящего момента (Iq-st2, Iq-st3, ...), которые равны или близки по значению составляющим крутящего момента (Iq-ss1, Iqss2, ...), измеренным в периоды устойчивого состояния (T-ss1, T-ss2, ...) предшествующего цикла (P1, P2, ...), подаваемым на двигатель (M) в периоды запуска (T-st2, T-st3, ...) всех циклов (P2, P3, ...) после первого цикла (P1).
8. Схема (1) управления по п.5, отличающаяся тем, что микроконтроллер (5) определяет длину периодов запуска (T-st2, T-st3, ...) всех циклов (P2, P3, P4, ...) после первого цикла (P1), которая находится в прямой зависимости от значений составляющих крутящего момента пуска (Iq-st2, Iq-st3, ...) до конца программы стирки, выполняемой в стиральной машине, в которой используется двигатель (M).
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| JP 3962668 B2, 22.08.2007 | |||
| US 20090267546 A1, 29.10.2009 | |||
| US 2005160771 A1, 28.07.2005 | |||
| US 7579798 B2, 25.08.2009 | |||
| СПОСОБ ЗАЩИТЫ СТАЛИ ОТ КОРРОЗИИ В НЕЙТРАЛЬНЫХ ВОДНЫХ СРЕДАХ | 2002 |
|
RU2219289C1 |
| WO03050341 A1, 19.06.2003 | |||

