Изобретение относится к оптико-электронному приборостроению и может использоваться в обзорно поисковых оптико-электронных системах лазерной локации, использующих принцип отражения излучения от исследуемого объекта.
Известен способ обнаружения оптических и оптико-электронных приборов и устройство для его реализации (Патент РФ №2568336, класс G01S 17/06, 20.11.2015, Бюл. №32), основанный на облучении зоны предполагаемого расположения оптических и оптико-электронных приборов лазерным поляризованным излучением, приеме и делении отраженного излучения на две ортогонально поляризованные составляющие в поляризационном делителе, отражении первой составляющей от первого элемента поляризационного делителя и фокусировке ее на чувствительной площадке фотоприемного устройства, формировании сигнала, пропорционального отношению интенсивности отраженного излучения, имеющего плоскость поляризации, ортогональную плоскости поляризации облучающего излучения, к интенсивности излучения, имеющего плоскость поляризации, совпадающую с плоскостью поляризации облучающего излучения, обнаружении в поле зрения системы оптических и оптико-электронных приборов, измерении координат обнаруженных целей, измерении дальности до них, отличающийся тем, что чувствительная площадка фотоприемного устройства разделена на две зоны для раздельной регистрации первой и второй составляющих отраженного излучения, причем первая составляющая сфокусирована в первой зоне, вторая составляющая отражена от второго элемента поляризационного делителя, произведена компенсация оптического пути и сфокусирована во второй зоне чувствительной площадки фотоприемного устройства.
Недостатками данного способа являются ограниченное поле сканирования, ручное определение направления на цель и отсутствие возможности подавления оптико-электронных средств наблюдения.
Известен способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов (Патент РФ №2574224, класс G01S 17/06, 01.02.2016, Бюл. №4), заключающийся в селекции объекта на удаленном фоне, приеме и формировании изображений в пространственно разнесенных точках, а также одновременной регистрации сформированных цифровых изображений высокоскоростными фотоприемниками, анализ изображений проводят при помощи определения величин смещения характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного, отличающийся тем, что в приеме и формировании изображений используются три точки с двумя равными базами, размещенными на Г-образной платформе с углом 90° посередине и с четырьмя стереопарами, состоящими из восьми телевизионных датчиков с одинаковыми характеристиками, размещенных под углами 45° выше линии горизонта, при этом в средней точке размещены четыре телевизионных датчика, размещенных по горизонтали через каждые 90°, тем самым в сумме создавая обзор пространства на 360° и возможность обнаруживать малогабаритные беспилотные летательные аппараты в пассивном режиме.
Основными недостатками данного способа являются большие геометрические размеры разнесенной базы, применение большого количества элементов и сомнительные возможности видеоканалов по обнаружению цели в условиях низкой освещенности, а также отсутствие возможности подавления оптико-электронных средств наблюдения.
В качестве прототипа выбран способ автоматизированного определение координат беспилотных летательных аппаратов (Патент РФ №2523446, класс G01S 3/78, 20.07.2014, Бюл. №20).
Данный способ включает применение камер кругового обзора в оптическом диапазоне электромагнитных волн, видеомонитора, ориентированного в пространстве, электронной вычислительной машины (ЭВМ) и лазерного дальномера для подсветки беспилотного летательного аппарата (БЛА), появление БЛА фиксируется автоматически как помеха, возникающая на кадре видеопоследовательности относительно предыдущего, а полученные данные обрабатываются на ЭВМ, где вырабатываются угловые значения местонахождения БЛА по высоте и по горизонту относительно центра углоизмерительного устройства, которое с помощью поворотных механизмов направляет лазерный дальномер на БЛА для измерения дальности до него, затем измеренная дальность от БЛА поступает на устройство обработки и отображения информации (ЭВМ), где происходит автоматизированное определение пространственных координат ХБЛА, YБЛА, ZБЛА беспилотных летательных аппаратов.
К недостаткам прототипа следует отнести невозможность селекции БЛА на значительном расстоянии, затруднительное обнаружение в ночных условиях наблюдения и ограниченную точность определения координат по видеоизображению. Кроме того данный способ не предполагает подавление оптико-электронных средств наблюдения БЛА.
В настоящее время особо остро стоит проблема противодействия неправовому использованию малых беспилотных воздушных судов (МБВС). Эта проблема включает не только непосредственно борьбу с МБВС, но и вопросы их своевременного обнаружения и селекции, основой для которых может служить наличие в их составе средств оптико-электронного наблюдения.
Задачами изобретения являются:
- автоматическое определение координат МБВС по отраженному лазерному излучению от объективов, размещенных на них средств оптико-электронного наблюдения;
- подавление размещенных на борту МБВС средств оптико-электронного наблюдения.
Техническим результатом, который достигается при решении данных задач, является повышение вероятности обнаружения МБВС, срыв возможности ведения с их помощью оптической разведки, а так же получение координат в интересах борьбы с ними.
Сущность предлагаемого способа заключается в автоматизированном выполнении последовательности операций: обнаружения МБВС методом лазерной локации; определение угловых координат МБВС методом лазерной локации; оптико-электронное подавление установленных на борту МБВС средств оптико-электронного наблюдения; определение дальности до МБВС; автоматическое сопровождение МБВС.
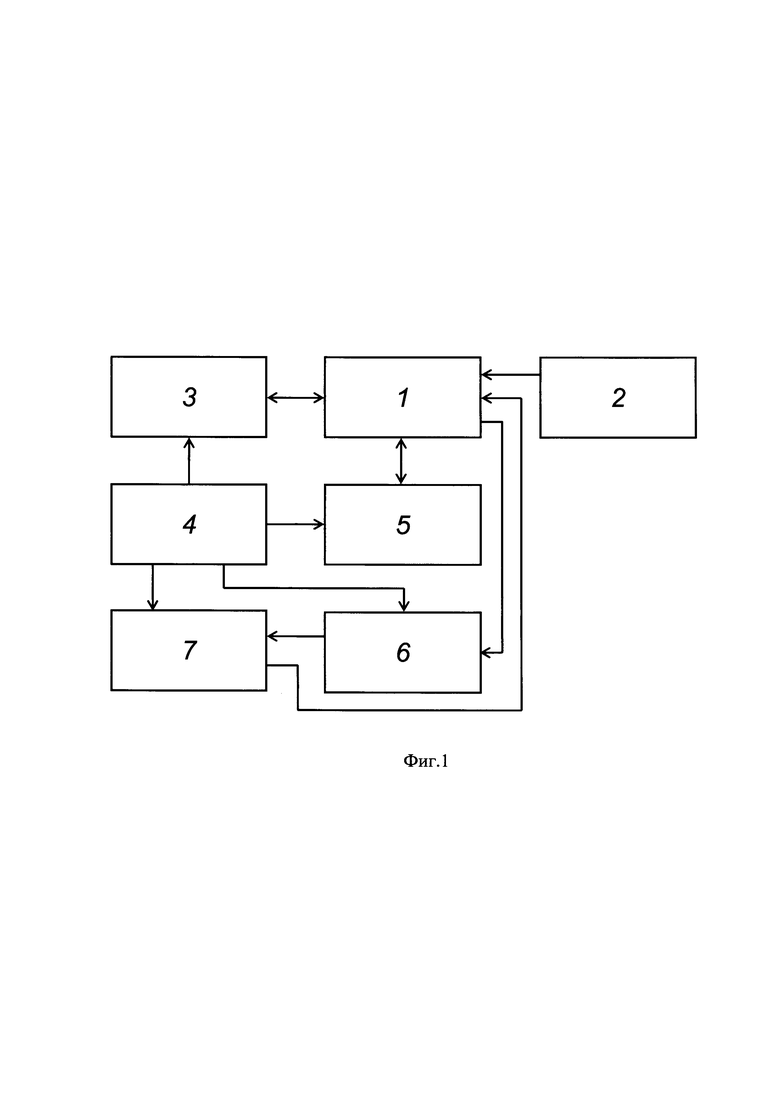
Предлагаемое устройство, реализующее предложенный способ содержит следующие блоки (фиг. 1):
- блок управления и обработки данных 1;
- блок геопозиционирования 2;
- блок горизонтального сканирования 3;
- блок оптико-электронных приборов 4;
- блок вертикального сканирования 5;
- блок лазерного подавления оптико-электронных приборов 6;
- блок лазерного дальномера 7;
при этом блоки 6 и 7 технологически совмещены с блоком 4.
Блок 1 определяет режимы работы блоков 3, 5, 6 и получает данные от блоков 2, 3, 5, 7, блок 4 выдает управляющие сигналы на блоки 3, 5, 6, 7, блок 6 выдает управляющий сигнал на блок 7.
Устройство функционирует следующим образом.
На этапе подготовки к работе, в блоке 1 вручную задаются параметры функционирования устройства:
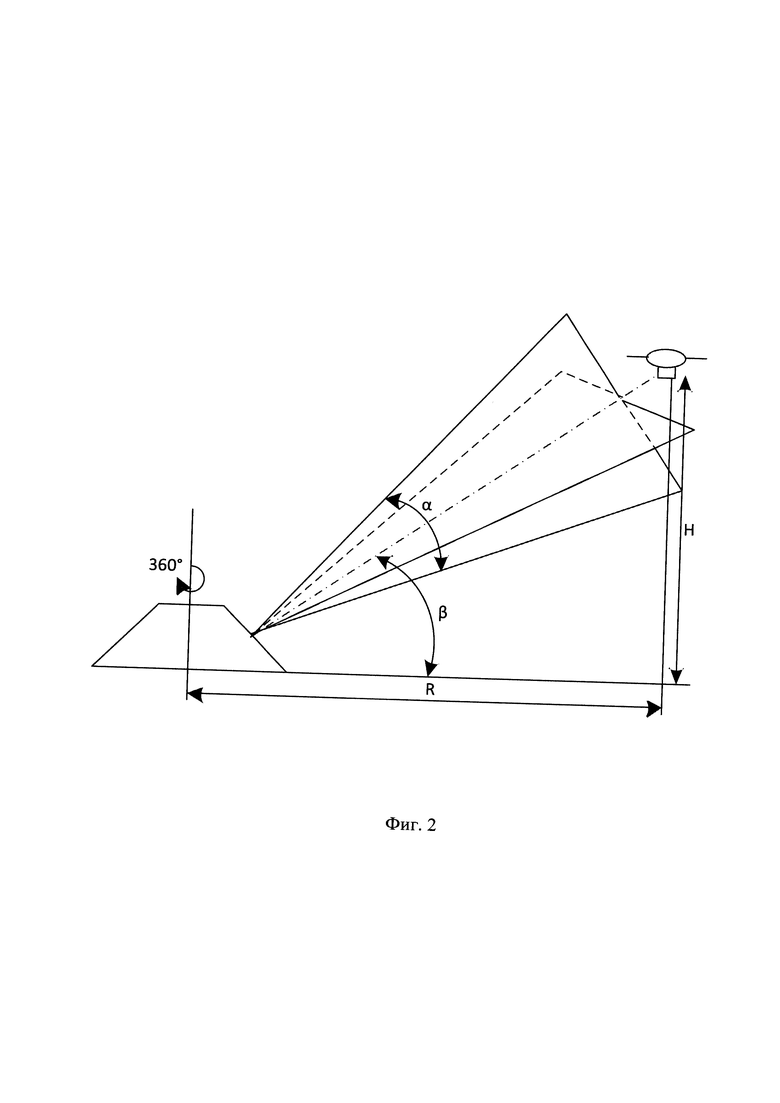
- угол возвышения оси сканирования β (фиг. 2), обеспечивающий заданную высоту обнаружения МБВС Н на границе зоны обнаружения R - путем подачи на блок вертикального сканирования 5 сигнала, соответствующего величине угла возвышения;
- характер работы устройства в режиме «поражение» - путем подачи на блок лазерного подавления оптико-электронных приборов 6 сигналов, соответствующих режимам работы «включено» или «выключено»;
- характер работы устройства в режиме «сопровождение» - путем подачи на блок горизонтального сканирования 3 и блок вертикального сканирования 5 сигналов, соответствующих режимам работы «включено» или «выключено».
При переводе устройства в рабочий режим, данные о его положении и ориентации в пространстве от блока 2 в автоматическом режиме фиксируются в блоке 1, после чего оно переходит в режим поиска.
Блок 3 осуществляет поворот блока 4 в горизонтальной плоскости, при этом в блоке 4 включен канал сканирования вертикальной плоскостью облучения с некоторым углом излучения α и углом возвышения относительно горизонта β.
При получении первого сигнала блока 4 об обнаружении оптико-электронного прибора МБВС, блок 3 переходит в режим сопровождения по горизонту, блок 5 осуществляет поворот блока 4 в вертикальной плоскости в диапазоне угла α с включенным каналом сканирования горизонтальной плоскостью.
При получении второго сигнала блока 4 об обнаружении оптико-электронного прибора МБВС, блоки 3 и 5 прекращают осуществлять поворот блока 4. Одновременно, при включенном режиме «поражение» формируется мощный импульс лазерного излучения блока 6, на время которого каналы сканирования отключаются, данные об азимуте из блока 3 и угле места из блока 5 цели фиксируются в блоке 1. По окончании поражающего импульса лазерного излучения (или при выключенном режиме «поражение») блок 6 выдает сигнал разрешения на блок 7, который измеряет дальность до МБВС и передает ее в блок 1. Расчет координат и высоты цели в блоке 1 производится по известным формулам на основе имеющейся информации о положении устройства и полученным данным о направлении на цель и ее дальности.
Блоки 3 и 5 по сигналам блока 4 удерживают направление на МБВС, (если включен режим «сопровождение») блок 7 с определенной частотой измеряет дальность до цели, при этом синхронно фиксируются данные о направлении и обновляются данные о координатах цели в блоке 1, иначе блок 5 приводит положение блока 4 по вертикали в исходное положение и устройство переводится в режим поиска.
Таким образом, предложенный способ и реализующее его устройство позволяют реализовать поставленные задачи:
- автоматически определять координаты МБВС по отраженному лазерному излучению от объективов, размещенных на них средств оптико-электронного наблюдения;
- подавлять размещенные на борту МБВС средств оптико-электронного наблюдения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЕ КООРДИНАТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2523446C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКОЙ | 2024 |
|
RU2828168C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Способ обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2742139C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СПОСОБ ЛАЗЕРНОГО ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ БПЛА | 2022 |
|
RU2796072C1 |
Изобретение относится к оптико-электронному приборостроению и может использоваться в обзорно-поисковых оптико-электронных системах лазерной локации. Способ и устройство подавления оптико-электронных средств и автоматизированного определения координат малых беспилотных воздушных судов, основанные на определении угловых значений местонахождения малого беспилотного воздушного судна по азимуту и углу места относительно устройства. При этом с помощью устройства, состоящего из блока управления и обработки данных, блока геопозиционирования, блока горизонтального сканирования, блока оптико-электронных приборов, блока вертикального сканирования, блока лазерного подавления оптико-электронных приборов и блока лазерного дальномера, последовательно выполняют: обнаружение МБВС методом лазерной локации; определение угловых координат МБВС методом лазерной локации; оптико-электронное подавление установленных на борту МБВС средств оптико-электронного наблюдения; определение дальности до МБВС; автоматическое сопровождение МБВС. Технический результат – повышение вероятности обнаружения МБВС, срыв возможности ведения с их помощью оптической разведки, а также получение координат для борьбы с ними. 2 н.п. ф-лы, 2 ил.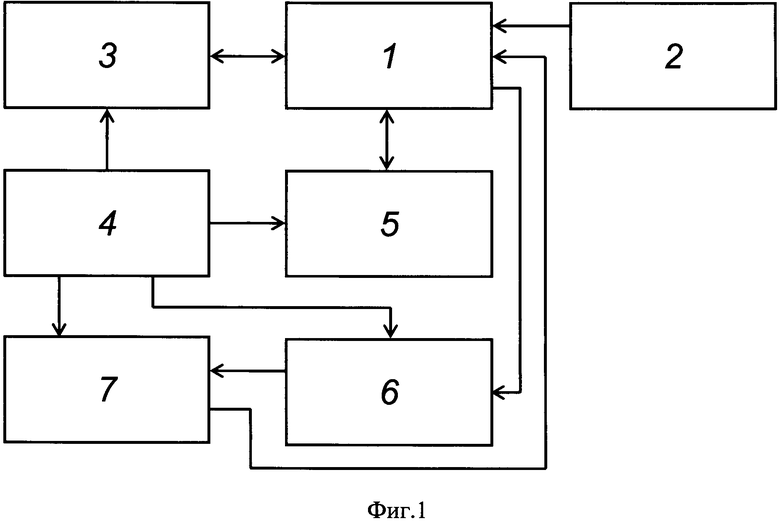
1 Способ подавления оптико-электронных средств и автоматизированного определения координат малых беспилотных воздушных судов, основанный на определении угловых значений местонахождения малого беспилотного воздушного судна по азимуту и углу места относительно устройства, реализующего предложенный способ, отличающийся тем, что с помощью устройства, реализующего предложенный способ, последовательно выполняют: обнаружение МБВС методом лазерной локации; определение угловых координат МБВС методом лазерной локации; оптико-электронное подавление установленных на борту МБВС средств оптико-электронного наблюдения; определение дальности до МБВС; автоматическое сопровождение МБВС.
2 Устройство подавления оптико-электронных средств и автоматизированного определения координат малых беспилотных воздушных судов, состоящее из: блока управления и обработки данных, блока геопозиционирования, блока горизонтального сканирования, блока оптико-электронных приборов, блока вертикального сканирования, блока лазерного подавления оптико-электронных приборов, блока лазерного дальномера; блок управления и обработки данных определяет режимы работы: блока горизонтального сканирования, блока вертикального сканирования, блока лазерного подавления оптико-электронных приборов и получает данные от: блока геопозиционирования, блока горизонтального сканирования, блока вертикального сканирования, блока лазерного дальномера; блок оптико-электронных приборов выдает управляющие сигналы на: блок горизонтального сканирования, блок вертикального сканирования, блок лазерного подавления оптико-электронных приборов, блок лазерного дальномера; блок лазерного подавления оптико-электронных приборов выдает управляющий сигнал на блок лазерного дальномера.
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЕ КООРДИНАТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2523446C2 |
| СПОСОБ БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ БЛИЖНЕГО И МАЛОГО РАДИУСА ДЕЙСТВИЯ С ПОМОЩЬЮ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕЦИМЕТРОВОГО ДИАПАЗОНА ДЛИН ВОЛН | 2013 |
|
RU2551821C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2574224C1 |

