Изобретение относится к области лазерной локационной техники, системам обеспечения безопасности и может быть использовано для дистанционного обнаружения и измерения координат оптических и оптико-электронных приборов: биноклей, зрительных труб, фотоаппаратов, видеокамер, стрелковых оптических прицелов, кинокамер, любых других приборов, снабженных оптическими объективами и имеющих в фокальной плоскости отражающий элемент. К этим системам относятся оптические пеленгаторы, обзорные локационно-поисковые приборы ручного типа либо поворотные со сканирующей оптической системой.
Известен ряд приборов с ручным сканированием, например, обзорное устройство, описанное в патенте RU 2129287, опубл. 20.04.1999г., позволяющее обнаруживать оптические бликующие объекты. Устройство содержит фотоприемный канал на базе электронно-оптического преобразователя (ЭОП), видеоконтрольное устройство (ВКУ), блок обработки сигналов, синхронизатор, частотно-импульсный полупроводниковый лазер, схема автоматической регулировки усиления (АРУ). В данном устройстве применение ЭОПа снижает потенциал по дальности из-за сильного влияния эффекта накопления фоновых шумов и ложных источников излучения. Кроме того, используются режимы лазеров с большой частотой посылок  и большой мощности, что приводит к снижению ресурсов энергопотребления и повышению класса лазерной опасности. Также недостатком является невозможность мгновенного измерения расстояния до объектов и отсутствие автоматической селекции оптических объектов.
и большой мощности, что приводит к снижению ресурсов энергопотребления и повышению класса лазерной опасности. Также недостатком является невозможность мгновенного измерения расстояния до объектов и отсутствие автоматической селекции оптических объектов.
Известно устройство для обнаружения оптических объектов (лазерный дальномер), описанное в патенте № 2324145, опубл. 10.05.2008г., позволяющее в реальном времени обнаруживать оптические объекты. Устройство содержит два импульсных полупроводниковых лазера (ПКГ) со своей оптической системой, два усилителя накачки, управляемый генератор импульсов, синхронизатор, оптический приемный объектив, лавинный фотодиод (ЛФД), усилитель фотосигналов, управляемый источник смещения ЛФД, первый компаратор, управляемый счетчик, измеритель временных интервалов (ИВИ), формирователь импульсов запрета, АРУ по шумам на базе второго компаратора, интегратора 2 , сумматор, интегратор 1 и интегратор 2, генератор строба, индикатор обнаружения объекта, речевой синтезатор.
Работает устройство следующим образом. Оператор производит обзор (сканирование) пространства по азимуту в зоне, где предполагается объект, при этом пространство облучается лазерными импульсами с частотой  в мгновенном поле зрения
в мгновенном поле зрения  и
и  . С помощью ПКГ1 и ПКГ2 через оптические системы формируются узкие ножевидные диаграммы излучения, сдвинутые параллельно друг от друга на малый угол, что позволяет пространственно на небольших расстояниях (до
. С помощью ПКГ1 и ПКГ2 через оптические системы формируются узкие ножевидные диаграммы излучения, сдвинутые параллельно друг от друга на малый угол, что позволяет пространственно на небольших расстояниях (до  ) селектировать малогабаритные и крупногабаритные цели (объективы, рекламные щиты и т.п.). Сканирование производится по горизонтали c вертикальным мгновенным углом захвата
) селектировать малогабаритные и крупногабаритные цели (объективы, рекламные щиты и т.п.). Сканирование производится по горизонтали c вертикальным мгновенным углом захвата  . Отраженный от объекта лазерный сигнал принимается через объектив ЛФД, фотодетектируется и усиливается, затем в аналоговом виде обрабатывается на пороговых элементах – компараторах, и при превышении заданного порога формируется сигнал обнаружения, подается на ИВИ, где производится оцифровка временной задержки в расстояние. Этот сигнал поступает в речевой синтезатор, который формирует речевое оповещение о расстоянии в звуковом индикаторе обнаружения объекта.
. Отраженный от объекта лазерный сигнал принимается через объектив ЛФД, фотодетектируется и усиливается, затем в аналоговом виде обрабатывается на пороговых элементах – компараторах, и при превышении заданного порога формируется сигнал обнаружения, подается на ИВИ, где производится оцифровка временной задержки в расстояние. Этот сигнал поступает в речевой синтезатор, который формирует речевое оповещение о расстоянии в звуковом индикаторе обнаружения объекта.
Недостатком устройства является малая точность определения углового положения по вертикали, т.к. обнаружение и визирование производится в широком поле по углу места  , т.е. полного угла мгновенного захвата. Также в условиях повышенных фоновых засветок
, т.е. полного угла мгновенного захвата. Также в условиях повышенных фоновых засветок  у ЛФД значительно падает чувствительность, что приводит к снижению потенциала по дальности. Кроме того, ввиду большого динамического диапазона входных лазерных сигналов
у ЛФД значительно падает чувствительность, что приводит к снижению потенциала по дальности. Кроме того, ввиду большого динамического диапазона входных лазерных сигналов  в диапазоне расстояний
в диапазоне расстояний  и невозможности во всем этом диапазоне амплитудно-временной пороговой обработкой произвести выделение полезного бликового сигнала на фоне паразитных диффузных сигналов, вероятность обнаружения бликовых сигналов малая
и невозможности во всем этом диапазоне амплитудно-временной пороговой обработкой произвести выделение полезного бликового сигнала на фоне паразитных диффузных сигналов, вероятность обнаружения бликовых сигналов малая  .
.
Также в экстремальных условиях, когда необходимо оперативно обнаружить опасный объект, например прицел, и мгновенно воздействовать на него (т.е. ввести световую помеху), эту функцию устройство не позволяет реализовать. Также устройство функционально не позволяет оперативно определять местоположение опасного объекта и не передает информацию на центральный пункт оперативного управления.
Техническим результатом изобретения является повышение эффективности обнаружения оптических и оптико-электронных приборов в условиях больших фоновых засветок, повышение точности определения положения объекта и улучшение эксплуатационных характеристик.
Поставленная задача достигается тем, что в лазерный обнаружитель оптических объектов, содержащий два импульсных полупроводниковых лазера (ПКГ), каждый из которых съюстирован со своей оптической системой и соединен со своим усилителем накачки, управляемый генератор импульсов, сигнальным выходом соединенный со входом первого усилителя накачки, а также последовательно соединенные оптический приемный объектив, лавинный фотодиод (ЛФД), первый усилитель фотосигналов, схему автоматической регулировки усиления (АРУ) по шумовым сигналам, управляемый источник смещения ЛФД, подключенный к его питающему входу измеритель временных интервалов, выходом подключенный к речевому синтезатору, звуковой модуль, подключенный к выходу речевого синтезатора, а также сумматор.
Причем
лазерные диаграммы первого ПКГ1 ( ) и второго ПКГ2 (
) и второго ПКГ2 ( ) через передающие объективы съюстированны по одной линии в одной плоскости с частичным перекрытием диаграмм (
) через передающие объективы съюстированны по одной линии в одной плоскости с частичным перекрытием диаграмм ( ),
),
перед приемным объективом установлен селективный светофильтр,
перед чувствительной площадкой ЛФД установлена оптическая маска с зоной просветления и поляризации, соответствующей полю зрения и диаграммам излучения, по вертикали  и горизонтали
и горизонтали  , и вектору поляризации излучения лазеров,
, и вектору поляризации излучения лазеров,
введены
источник световой помехи на  и
и  , диаграммы излучения которого сопряжены с зоной перекрытия лазерных диаграмм ПКГ1 и ПКГ2,
, диаграммы излучения которого сопряжены с зоной перекрытия лазерных диаграмм ПКГ1 и ПКГ2,
включаемый источник питания, выход которого подключен к входу источника световой помехи,
второй усилитель фотосигналов, подключенный к выходу первого усилителя фотосигналов,
первый селектор сигналов, подключенный по входу к выходу первого усилителя, второй селектор сигналов, подключенный по входу к выходу второго усилителя фотосигналов, выходы первого и второго селекторов подключены к входам сумматора,
светодиод подсветки, съюстированный своей диаграммой с зоной просветления оптической маски, инвертирующий усилитель, выходом соединенный со светодиодом и входом управляемого источника смещения, а инвертирующим входом – с выходом схемы АРУ по шумовым сигналам, вход которой подключен к выходу второго усилителя фотосигналов,
линия задержки, подключенная по входу к сигнальному выходу управляемого генератора сигнальных импульсов, а по выходу - ко входу второго усилителя накачки,
коммутатор сигналов, первый вход которого подключен к сигнальному выходу управляемого генератора импульсов, а второй вход – к выходу линии задержки,
генераторы F1 и F2, подключенные входами к выходам коммутатора,
F1 и F2, подключенные входами к выходам коммутатора,
второй сумматор, соединенный двумя входами с выходами коммутатора, а выходом – со вторым входом звукового модуля,
схема «И», подключенная двумя входами к выходам генераторов F1 и F2, а выходом – к включаемому источнику питания лазеров подсветки и управляющему входу генератора импульсов,
третий сумматор, соединенный двумя входами с выходом линии задержки и выходом управляемого генератора импульсов, а выходом с управляющими входами первого и второго селекторов,
переключатель режимов, подключенный первым выходом к третьему входу схемы И, вторым – к третьему входу сумматора, третьим – к третьему входу речевого синтезатора.
Также в лазерный обнаружитель оптических объектов введены телекамера широкой спектральной чувствительности с визирным объективом, поле зрения которого больше поля зрения приемного объектива, дешифратор, первый вход которого подключен к выходу ИВИ, второй и третий – к выходам генераторов F1 и F2, микродисплей, сопряженный с окуляром и соединенный по входам с выходом телекамеры и выходом дешифратора.
Также в лазерный обнаружитель оптических объектов введены электронный компас, соединенный с микродисплеем и телевизионной камерой, ячейка памяти, соединенная с электронным компасом и дешифратором, модуль «GРS» - «Глонас», соединенный с ячейкой памяти, и передатчик, соединенный с выходом ячейки памяти.
На оптическую маску нанесено поляризационное покрытие с вектором поляризации вдоль зоны просветления и в соответствии с вектором поляризации лазеров.
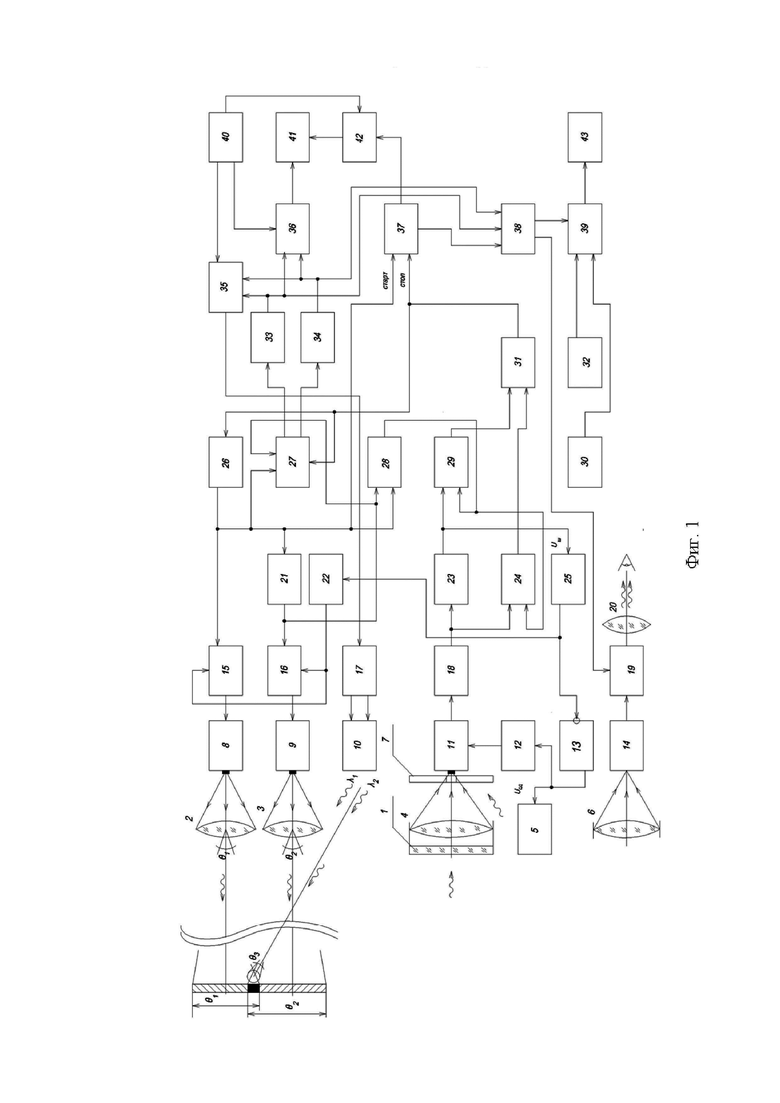
Сущность изобретения поясняется чертежами.
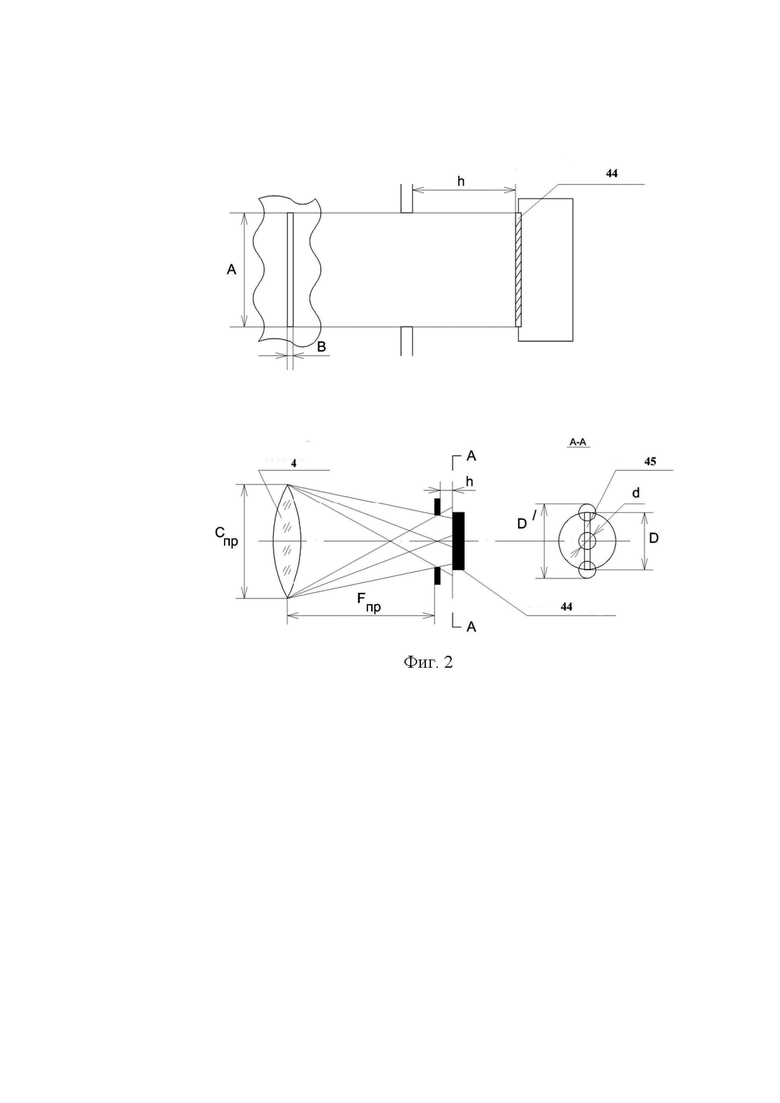
На Фиг. 1 представлена структурная схема предлагаемого лазерного обнаружителя оптических объектов (ОО) содержащего: селективный светофильтр 1, первый передающий объектив 2, второй передающий объектив 3, приемный объектив 4, светодиод 5, визирный объектив 6, оптическую маску 7, первый импульсный полупроводниковый лазер (ПКГ1) 8, второй ПКГ 9, источник световой помехи 10, лавинный фотодиод (ЛФД) 11, управляемый источник смещения 12, инвертирующий усилитель 13, телекамеру широкой спектральной чувствительности 14, первый усилитель накачки 15, второй усилитель накачки 16, включаемый источник питания 17, первый усилитель фотосигналов 18. микродисплей 19, окуляр 20, линию задержки 21, регулируемый источник питания накачки 22, второй усилитель фотосигналов 23, первый селектор 24, схему автоматической регулировки усиления (АРУ) по шумам 25, управляемый генератор импульсов 26, коммутатор 27, третий сумматор 28, ВТО рой селектор 29, электронный компас 30, первый сумматор 31, модуль «GPS»-«Глонас» 32, генератор F1 33, генератор F2 34, схему «И» 35, второй сумматор 36, измеритель временных интервалов (ИВИ) 37, дешифратор 38, ячейку памяти 39, переключатель режимов 40, звуковой модуль 41, речевой синтезатор 42, передатчик 43.
На фиг. 2 представлен эскиз оптической маски, где: 44 – чувствительная площадка ЛФД, 45 - диафрагма. И приведен анализ снижения уровня фона, падающего на чувствительную площадку ЛФД за счет применения поляризационной маски (щелевой диафрагмы), в соответствии с нижеприведенным расчетом:
где: D' – размер зоны захвата полей зрения;
D – размер чувствительной площадки ЛФД;
d – размер кружка расфокусировки изображения на чувствительной площадке ЛФД;
Спр – размер входного зрачка приемного объектива;
h – расстояние от задней поверхности диафрагмы до чувствительной площадки ЛФД;
Fпр – фокусное расстояние приемного объектива.
При Cпр = 30 мм, Fпр = 40 мм, h = 1мм,

Союстировка диаграмм излучения лазеров ПКГ1 и ПКГ2 по одной линии в одной плоскости с частичным перекрытием по оси визирования позволяет сформировать трехпозиционную зону обнаружения с двумя широкими зонами и одной узкой в центральном участке перекрытия и соответственно повысить точность углового наведения и визирования устройства.
Введение селективного (интерференционного) светофильтра перед приемным объективом и оптической маски перед чувствительной площадкой ЛФД позволяет значительно уменьшить фоновую засветку, что в условиях сильных облученностей днем (до  ) повышает чувствительность и соответственно потенциал по дальности обнаружения.
) повышает чувствительность и соответственно потенциал по дальности обнаружения.
Оптическая маска выполняется по диаметру больше чувствительной площадки ЛФД с зоной просветления в центральной зоне площадки ЛФД, при этом она максимально приближена к чувствительной площадке. Размеры зоны просветления  ,
,
где  - ширина зоны просветления
- ширина зоны просветления  ;
;
 - фокусное расстояние приемного объектива,
- фокусное расстояние приемного объектива,
 - поле зрения, которое выбирается из условия:
- поле зрения, которое выбирается из условия:
 ,
,
где 

 ;
;

 и как правило выбирается порядка
и как правило выбирается порядка  .
.
Введение поляризационного покрытия на оптической маске позволяет подавлять лазерные сигналы от диффузно отражающих объектов (домов, деревьев, травы и т.п.), что повышает вероятность селекции полезных сигналов от оптических объектов и снизить вероятность ложных сигналов.
Введение второго усилителя фотосигналов с коэффициентом усиления  (при условии уменьшения коэффициента усиления первого усилителя
(при условии уменьшения коэффициента усиления первого усилителя  ) и селекторов сигналов на выходе каждого усилителя позволило увеличить динамический диапазон амплитудно-временного анализа в
) и селекторов сигналов на выходе каждого усилителя позволило увеличить динамический диапазон амплитудно-временного анализа в  раз; например, при
раз; например, при  предыдущий
предыдущий  , то новый
, то новый  и в этом случае повышается вероятность правильного обнаружения и расширяется диапазон расстояний возможной селекции объектов.
и в этом случае повышается вероятность правильного обнаружения и расширяется диапазон расстояний возможной селекции объектов.
Введение дополнительных элементов: линии задержки, коммутатора, генераторов F1 и F2, второго сумматора позволило выделять и отображать зоны обнаружения на соответствующих участках диаграмм лазеров ПКГ1 и ПКГ2, что повышает точность визирования на оптический объект и расширяет эксплуатационные характеристики устройства.
Введение источника световой помехи (подсветки) и союстировка его диаграммы с центральной зоной перекрытия диаграмм лазеров с соответствующими элементами управления (быстродействующего включаемого источника питания и схемы «И») позволяет в реальном масштабе времени - практически мгновенно  вводить световую помеху на обнаруженный оптический объект, что значительно помешает наведению, наблюдения и прицеливанию. При этом длина волны излучения выбирается следующим образом:
вводить световую помеху на обнаруженный оптический объект, что значительно помешает наведению, наблюдения и прицеливанию. При этом длина волны излучения выбирается следующим образом:
 - видимое излучение (для глаза);
- видимое излучение (для глаза);
 - ИК излучение (для ночных приборов).
- ИК излучение (для ночных приборов).
Введение светодиода подсветки ЛФД и инвертирующего усилителя позволяет стабилизировать уровень фона в различных условиях, уменьшить изменение коэффициента усиления ЛФД и соответственно стабилизировать суммарный коэффициент усиления приемного канала, что повышает точность селекции полезных сигналов. Также это позволяет исключить выход из рабочих режимов ЛФД при низких температурах и при отсутствии фоновой засветки (в темное время суток), т.е. исключить режим самовозбуждения при переходе из гауссова режима распределения шумов в пуассоновский.
Введение телевизионного визирного канала широкого спектрального диапазона позволило оперативно наблюдать панораму местности как в дневное, так и в вечернее время суток с отображением зон обнаружения и информации.
Введение электронного компаса и модуля «GPS»-«Глонас» и ячейки памяти позволяет оперативно выдавать информацию по текущим координатам обнаруживаемого оптического объекта с привязкой к местности.
Обнаружитель работает следующим образом.
Конструктивно устройство выполнено в виде малогабаритного ручного прибора. Сканирование и обзор пространства осуществляется вручную в двух плоскостях – по углу места  и азимуту
и азимуту  . При этом совместной ножевидной диаграммой излучения, расположенной вертикально, происходит захват оптического объекта (ОО). Облучение производится частотой импульсов
. При этом совместной ножевидной диаграммой излучения, расположенной вертикально, происходит захват оптического объекта (ОО). Облучение производится частотой импульсов  . Наблюдение и обзор пространства оператор производит через телевизионный визирный канал, сьюстированный с приемный и передающим объективами, при этом ось приемного объектива сьюстирована с зоной перекрытия. Угловые размеры диаграмм выбираются исходя из тактико-технических требований к обнаружителю. Например, типовые параметры следующие: суммарная диаграмма лазеров в вертикальной плоскости
. Наблюдение и обзор пространства оператор производит через телевизионный визирный канал, сьюстированный с приемный и передающим объективами, при этом ось приемного объектива сьюстирована с зоной перекрытия. Угловые размеры диаграмм выбираются исходя из тактико-технических требований к обнаружителю. Например, типовые параметры следующие: суммарная диаграмма лазеров в вертикальной плоскости  с зоной перекрытия
с зоной перекрытия  . При этом ширина диаграммы в горизонтальной плоскости при хорошем качестве передающих объективов составит
. При этом ширина диаграммы в горизонтальной плоскости при хорошем качестве передающих объективов составит угловых минуты.
угловых минуты.
Вертикальными диаграммами лазеров при сканировании пространства по азимуту производится захват объекта, прием отраженного сигнала и формирование сигнала обнаружения. При этом звуковой модуль выдает тоновый сигнал либо частоты  при попадании объекта в верхнюю диаграмму излучения ПКГ1, либо частоты
при попадании объекта в верхнюю диаграмму излучения ПКГ1, либо частоты  при попадании в нижнюю зону диаграммы излучения ПКГ2. Сканируя в вертикальной плоскости вдоль диаграммы, оператор добивается попадания в центральную зону перекрытия диаграмм. Факт попадания определяется наличием звукового тона
при попадании в нижнюю зону диаграммы излучения ПКГ2. Сканируя в вертикальной плоскости вдоль диаграммы, оператор добивается попадания в центральную зону перекрытия диаграмм. Факт попадания определяется наличием звукового тона 
Лазерные импульсы первого 8 и второго 9 ПКГ сдвинуты во времени на задержку 
 ,
,
где:  - максимальная частота импульсов генератора,
- максимальная частота импульсов генератора,
 - фазовая скорость света,
- фазовая скорость света,
 - максимальная измеряемая дальность.
- максимальная измеряемая дальность.
При этом появляется возможность выделять отраженные сигналы от первого и второго ПКГ с помощью временного коммутатора 27, управляемого импульсами, подаваемыми с входов первого 15 и второго 16 усилителей накачки. Частота импульсов управляемого генератора импульсов 26  зависит от требований скорости углового обзора
зависит от требований скорости углового обзора  (максимальный угол обзора за секунду).
(максимальный угол обзора за секунду).
 ,
,
где  - ширина диаграммы лазеров
- ширина диаграммы лазеров  ,
,
тогда при скорости  частота составит
частота составит  .
.
При обнаружении оптического объекта устройство фиксируется на объекте и выдается команда с выхода сумматора 2 на управляемый генератор импульсов, что приводит к резкому уменьшению частоты излучения (до  ). Это снижает энергопотребление.
). Это снижает энергопотребление.
Отраженные от объекта лазерные импульсы принимаются приемным объективом 4. Для снижения фоновых засветок и увеличения чувствительности применяется селективный (интерференционный) светофильтр 1 с полосой пропускания  и оптическая маска 7 с просветленной зоной в виде щели.
и оптическая маска 7 с просветленной зоной в виде щели.
Далее принятые лазерные сигналы фотодетектируются с помощью фотодетектора с внутренним усилением (ЛФД) 11, усиливаются первым усилителем фотосигналов 18 и вторым усилителем 23.
С выходов каждого из усилителей сигналы поступают на свои первый 24 и второй 29 селекторы, где происходит аналого-временная селекция полезных информационных сигналов на фоне помех, шумов и сигналов от диффузно отражающих объектов (зданий, деревьев, листвы и т.п.). Сигналы управления селекторами поступают с выхода третьего сумматора 28, который суммирует сигналы во времени с выходов генератора импульсов 26 и линии задержки 21. Использование последовательного включения двух усилителей с коэффициентами усиления  и
и  и обработка сигналов с выходов каждого позволяет повысить динамический диапазонлинейного участка амплитудного диапазона входных сигналов. Например, если использовать один усилитель с
и обработка сигналов с выходов каждого позволяет повысить динамический диапазонлинейного участка амплитудного диапазона входных сигналов. Например, если использовать один усилитель с  при амплитудно-временной обработке, то его динамический диапазон составит, как правило:
при амплитудно-временной обработке, то его динамический диапазон составит, как правило:
 ,
,
где:  ,
,  ,
,  .
.
В то же время динамический диапазон входных лазерных сигналов в диапазоне расстояний  составит не менее
составит не менее  .
.
Применение двухзвенного включения усилителей с параллельной обработкой информации позволяет расширить динамический диапазон в раз. Например, при  имеем суммарный динамический диапазон
имеем суммарный динамический диапазон  .
.
Это решение позволяет производить селекцию практически на всем диапазоне дистанций; ранее из-за насыщения сигналов на ближних расстояниях было ограничение по минимальной дистанции.
Для исключения перегрузки второго селектора 29 сигнал селекции подается со сдвигом во времени относительного первого селектора, т.е. селекция производится с расстояний среднего диапазона (например,  ), сигнал с которых выходит из насыщения амплитудной характеристики.
), сигнал с которых выходит из насыщения амплитудной характеристики.
С выходов селекторов сигналы обнаружения суммируются во времени на первом сумматоре 31. с которого подаются на измеритель временных интервалов 37, где оцифровываются пропорционально временной задержке и масштабируются по дистанции, через дешифратор 38 подаются на речевой синтезатор 42, с которого информация о дальности в звуковом виде подается на звуковой модуль 41 (динамик, наушники).
Также сигналы обнаружения подаются с выхода первого сумматора 31 на коммутатор 27, который управляется импульсами с выхода генератора 25 и линии задержки 21, сдвинутыми во времени на . В коммутаторе производится разделение во времени сигналов обнаружения от первого и второго ПКГ и соответственно от верхней и нижней диаграмм излучения. Эти сигналы с выхода коммутатора каждый запускает соответствующий генератор  и
и  (звуковые частоты, например,
(звуковые частоты, например,  ,
,  ). В случае попадания объекта в зону перекрытия диаграмм формируют одновременно и . При смешении на сумматоре формируется . С выхода сумматоров звуковые частоты подаются на звуковой индикатор 41. Включение режима «тон», при котором производится поиск и фиксация объекта, и «речь», при котором выдается информация о дальности до объекта, производится оператором с переключателя режимов 40. Одновременно сигналы с выходов генераторов и подаются на схему «И» 35 и при их совпадении выдается команда на включение источника питания 17, который запитывает лазеры световой помехи (например, лазерные указки средней мощности).
). В случае попадания объекта в зону перекрытия диаграмм формируют одновременно и . При смешении на сумматоре формируется . С выхода сумматоров звуковые частоты подаются на звуковой индикатор 41. Включение режима «тон», при котором производится поиск и фиксация объекта, и «речь», при котором выдается информация о дальности до объекта, производится оператором с переключателя режимов 40. Одновременно сигналы с выходов генераторов и подаются на схему «И» 35 и при их совпадении выдается команда на включение источника питания 17, который запитывает лазеры световой помехи (например, лазерные указки средней мощности).
Спектральные характеристики лазеров световой помехи выбираются исходя из факторов воздействия. Например, выбираем зеленый спектр для воздействия на глаз  и ИК-излучение
и ИК-излучение  на приборы ночного видения (камеры, ПНВ и т.п.). Узкие диаграммы лазеров световой помехи (порядка
на приборы ночного видения (камеры, ПНВ и т.п.). Узкие диаграммы лазеров световой помехи (порядка  ) юстируются на центральную зону перекрытия диаграмм излучения ПКГ1и ПКГ2, т.е. при попадании оптического объекта в зону перекрытия диаграмм происходит практически мгновенное
) юстируются на центральную зону перекрытия диаграмм излучения ПКГ1и ПКГ2, т.е. при попадании оптического объекта в зону перекрытия диаграмм происходит практически мгновенное  воздействие на объект лазером световой помехи. Этот режим воздействия на оптический объект необходим в экстремальных условиях, когда существует опасность наличия снайперов и нет времени на обработку информации и принятие решения. Режим световой помехи может включаться-отключаться оператором с помощью переключателя режимов 40 (тумблеров, кнопок).
воздействие на объект лазером световой помехи. Этот режим воздействия на оптический объект необходим в экстремальных условиях, когда существует опасность наличия снайперов и нет времени на обработку информации и принятие решения. Режим световой помехи может включаться-отключаться оператором с помощью переключателя режимов 40 (тумблеров, кнопок).
С выхода второго усилителя шумовые сигналы плюс шумы ЛФД, составляющие порядка  в полосе пропускания
в полосе пропускания  , подаются на схему АРУ по шумам 24, где усиливаются, детектируются и интегрируются. Этот сигнал подается на управляемый источник смещения 12, который изменяет напряжение на ЛФД 11 с обратным знаком, т.е. чем больше сигнал с АРУ по шумам, тем меньше напряжение смещения. При этом коэффициент усиления ЛФД и уровень шумов зависят от напряжения смещения:
, подаются на схему АРУ по шумам 24, где усиливаются, детектируются и интегрируются. Этот сигнал подается на управляемый источник смещения 12, который изменяет напряжение на ЛФД 11 с обратным знаком, т.е. чем больше сигнал с АРУ по шумам, тем меньше напряжение смещения. При этом коэффициент усиления ЛФД и уровень шумов зависят от напряжения смещения:
 ,
,
где:  - текущее значение смещения,
- текущее значение смещения,
 - рабочее напряжение лавинного пробоя ЛФД 11,
- рабочее напряжение лавинного пробоя ЛФД 11,
 - коэффициент избыточных шумов
- коэффициент избыточных шумов  .
.
Напряжение лавинного пробоя  меняется от температуры и уровня фона, что приводит также к изменению эквивалентного уровня шума на выходе второго усилителя фотосигналов. Коэффициент усиления АРУ выбирается из условия компенсации изменения уровня шумов и поддержания их в заданных пределах, т.е.
меняется от температуры и уровня фона, что приводит также к изменению эквивалентного уровня шума на выходе второго усилителя фотосигналов. Коэффициент усиления АРУ выбирается из условия компенсации изменения уровня шумов и поддержания их в заданных пределах, т.е.  . Этим исключается перегрузка ЛФД 11 по фону (яркий солнечный день, блики и т.п.) и обеспечивается функционирование устройства при больших перепадах фона и температуры
. Этим исключается перегрузка ЛФД 11 по фону (яркий солнечный день, блики и т.п.) и обеспечивается функционирование устройства при больших перепадах фона и температуры  .
.
Одновременно с выхода АРУ по шумам 25 сигнал  , пропорциональный шумовому напряжению на выходе второго фотоусилителя 23 поступает на инвертирующий усилитель 13, выходной ток которого формирует с помощью светодиода 5 сигнал подсвета ЛФД 11, с помощью которого стабилизируется режим усиления ЛФД в условиях изменения фоновых засветок и температуры за счет компенсации изменения уровня подсветки светодиода 5.
, пропорциональный шумовому напряжению на выходе второго фотоусилителя 23 поступает на инвертирующий усилитель 13, выходной ток которого формирует с помощью светодиода 5 сигнал подсвета ЛФД 11, с помощью которого стабилизируется режим усиления ЛФД в условиях изменения фоновых засветок и температуры за счет компенсации изменения уровня подсветки светодиода 5.
Также введение фоновой подсветки исключает режим неуправляемого лавинного пробоя ЛФД, который приводит к самовозбуждению фотоприемного канала.
Одновременно с выхода АРУ 25 напряжение, пропорциональное уровню шумов, подается на регулируемый источник питания накачки 22, который запитывает усилители накачки 15 и 16. При повышении уровня шумов  напряжение питания усилителей накачки 15 и 16 увеличивается, что приводит к увеличению уровня накачки ПКГ1 и ПКГ2 и, соответственно, мощности излучения. Это позволяет компенсировать снижение чувствительности ЛФД 11 при увеличении фоновых засветок.
напряжение питания усилителей накачки 15 и 16 увеличивается, что приводит к увеличению уровня накачки ПКГ1 и ПКГ2 и, соответственно, мощности излучения. Это позволяет компенсировать снижение чувствительности ЛФД 11 при увеличении фоновых засветок.
Суммарно за счет компенсации изменения подсветки ЛФД и регулировки уровня мощности излучения ПКГ1 и ПКГ2 удалось стабилизировать в пределах  сквозную амплитудную характеристику сквозного аналогового тракта обнаружителя
сквозную амплитудную характеристику сквозного аналогового тракта обнаружителя
 .
.
Снижение нестабильности сквозной амлитудной характеристики приемо-передающего канала в пределах  позволило повысить точность селекции полезных сигналов от бликовых оптических объектов относительно паразитных сигналов (диффузно отражающих объектов, дорожных знаков, бутылок, фонарей, рекламных светоотражающих щитов и т.п.), что в свою очередь повышает вероятность правильного обнаружения до
позволило повысить точность селекции полезных сигналов от бликовых оптических объектов относительно паразитных сигналов (диффузно отражающих объектов, дорожных знаков, бутылок, фонарей, рекламных светоотражающих щитов и т.п.), что в свою очередь повышает вероятность правильного обнаружения до  и снижает количество ложных срабатываний.
и снижает количество ложных срабатываний.
Экспериментальные данные по ассортименту разного типа отражающих объектов показали, что различие их ПСВ (показатель световращения) незначительно: например, ПСВ дорожных знаков относительно бликующих объектов (биноклей, наблюдательных труб, прицелов) отличается примерно в  раза. Поэтому в прототипе задача выделения бликующих объектов относительно дорожных знаков, автомобильных номеров, фар и т.п. не решалась, т.к. в нем нестабильность чувствительности ЛФД в температурных разбросах
раза. Поэтому в прототипе задача выделения бликующих объектов относительно дорожных знаков, автомобильных номеров, фар и т.п. не решалась, т.к. в нем нестабильность чувствительности ЛФД в температурных разбросах  и фоновых перепадах
и фоновых перепадах  достигала
достигала  , т.е. изменялась в
, т.е. изменялась в  раз.
раз.
В соответствии с вышеприведенными основными техническими решениями созданы экспериментальные образцы данного устройства, которые были испытаны в реальных условиях. Партия данных образцов была поставлена для эксплуатации в охранных структурах. По результатам эксплуатации и испытаний получены следующие основные технические параметры:
- диапазон дальности обнаружения основных классов оптических приборов – до  ;
;
- оценочная вероятность достоверного обнаружения на фоне паразитных помех и мешающих диффузно отражающих объектов - не ниже  ;
;
- оценочная вероятность срабатывания от ложных объектов (стекло, мокрая листва, окна, стены домов, лакокрасочные покрытия объектов и т.п.) не более  ;
;
- диапазон рабочих температур -  ;
;
- диапазон внешних фоновых засветок - до 50000 люкс.
Таким образом, всей совокупностью указанных конструктивных особенностей предлагаемого устройства достигается заявленный технический результат, заключающийся в повышении эффективности обнаружения оптических и оптико-электронных приборов в условиях больших фоновых засветок, в повышении точности определения положения объекта и улучшение эксплуатационных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2324145C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА НА МАЛЫХ ДИСТАНЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549210C2 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2551700C1 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2277254C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СРЕДСТВ ОПТИЧЕСКОГО И ОПТОЭЛЕКТРОННОГО ТИПА | 1998 |
|
RU2133485C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
Использование: изобретение относится к области лазерной локационной техники, системам обеспечения безопасности и может быть использовано для дистанционного обнаружения и измерения координат оптических и оптико-электронных приборов. Сущность: лазерный обнаружитель оптических объектов содержит два импульсных полупроводниковых лазера, управляемый генератор импульсов, последовательно соединенные оптический приемный объектив, лавинный фотодиод (ЛФД), первый усилитель фотосигналов, схему автоматической регулировки усиления (АРУ) по шумовым сигналам, управляемый источник смещения ЛФД, подключенный к его питающему входу измеритель временных интервалов, звуковой модуль, сумматор. Причем лазерные диаграммы первого ПКГ1 и второго ПКГ2 через передающие объективы съюстированы по одной линии в одной плоскости с частичным перекрытием диаграмм, перед приемным объективом установлен селективный светофильтр, перед чувствительной площадкой ЛФД установлена оптическая маска с зоной просветления и поляризации. Лазерный обнаружитель оптических объектов дополнительно содержит источник световой помехи, включаемый источник питания, второй усилитель фотосигналов, первый и второй селекторы сигналов, светодиод подсветки, съюстированный своей диаграммой с зоной просветления оптической маски, линию задержки, коммутатор сигналов, генераторы F1 и F2 , второй сумматор, схему «И», третий сумматор, переключатель режимов. Технический результат: повышение эффективности обнаружения оптических и оптико-электронных приборов в условиях больших фоновых засветок, повышение точности определения положения объекта и улучшение эксплуатационных характеристик. 3 з.п. ф-лы, 2 ил.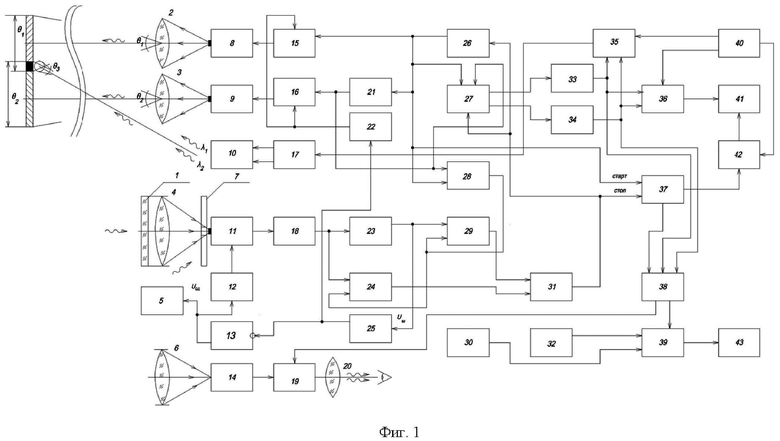
1. Лазерный обнаружитель оптических объектов, содержащий два импульсных полупроводниковых лазера (ПКГ), каждый из которых съюстирован со своим передающим объективом и соединен со своим усилителем накачки, управляемый генератор импульсов, сигнальным выходом соединенный со входом первого усилителя накачки, а также последовательно соединенные оптический приемный объектив, лавинный фотодиод (ЛФД), первый усилитель фотосигналов, схему автоматической регулировки усиления (АРУ) по шумовым сигналам, управляемый источник смещения ЛФД, подключенный к питающему входу ЛФД, измеритель временных интервалов, выходом подключенный к речевому синтезатору, звуковой модуль, подключенный к выходу речевого синтезатора, сумматор, отличающийся тем, что
- лазерные диаграммы первого ПКГ1 ( ) и второго ПКГ2 (
) и второго ПКГ2 ( ) через передающие объективы съюстированы по одной линии в одной плоскости с частичным перекрытием диаграмм (
) через передающие объективы съюстированы по одной линии в одной плоскости с частичным перекрытием диаграмм ( ),
),
- перед приемным объективом установлен селективный светофильтр,
- перед чувствительной площадкой ЛФД установлена оптическая маска с зоной просветления и поляризации, соответствующей полю зрения и диаграммам излучения, по вертикали  и горизонтали
и горизонтали  , и вектору поляризации излучения лазеров,
, и вектору поляризации излучения лазеров,
- введены
источник световой помехи на  и
и  , диаграммы излучения которого сопряжены с зоной перекрытия лазерных диаграмм ПКГ1 и ПКГ2,
, диаграммы излучения которого сопряжены с зоной перекрытия лазерных диаграмм ПКГ1 и ПКГ2,
включаемый источник питания, выход которого подключен к входу источника световой помехи,
второй усилитель фотосигналов, подключенный к выходу первого усилителя фотосигналов,
первый селектор сигналов, подключенный по входу к выходу первого усилителя, второй селектор сигналов, подключенный по входу к выходу второго усилителя фотосигналов, выходы первого и второго селекторов подключены к входам сумматора,
светодиод подсветки, съюстированный своей диаграммой с зоной просветления оптической маски,
инвертирующий усилитель, выходом соединенный со светодиодом и входом управляемого источника смещения, а инвертирующим входом – с выходом схемы АРУ по шумовым сигналам, вход которой подключен к выходу второго усилителя фотосигналов,
линия задержки, подключенная по входу к сигнальному выходу управляемого генератора сигнальных импульсов, а по выходу - ко входу второго усилителя накачки,
коммутатор сигналов, первый вход которого подключен к сигнальному выходу управляемого генератора импульсов, а второй вход – к выходу линии задержки,
генераторы  F1 и F2, подключенные входами к выходам коммутатора,
F1 и F2, подключенные входами к выходам коммутатора,
второй сумматор, соединенный двумя входами с выходами коммутатора, а выходом – со вторым входом звукового модуля,
схема «И», подключенная двумя входами к выходам генераторов F1 и F2, а выходом – к включаемому источнику питания лазеров подсветки и управляющему входу генератора импульсов,
третий сумматор, соединенный двумя входами с выходом линии задержки и выходом управляемого генератора импульсов, а выходом с управляющими входами первого и второго селекторов,
переключатель режимов, подключенный первым выходом к третьему входу схемы И, вторым – к третьему входу сумматора, третьим – к третьему входу речевого синтезатора.
2. Устройство по п.1, отличающееся тем, что включает телекамеру широкой спектральной чувствительности с визирным объективом, поле зрения которого больше поля зрения приемного объектива, дешифратор, первый вход которого подключен к выходу измерителя временных интервалов (ИВИ), второй и третий вход подключен к выходам генераторов F1 и F2, микродисплей, сопряженный с окуляром и соединенный по входам с выходом телекамеры и выходом дешифратора.
3. Устройство по п.1, отличающееся тем, что включает электронный компас, соединенный с микродисплеем и телевизионной камерой, ячейку памяти, соединенную с электронным компасом и дешифратором, модуль «GРS» - «Глонас», соединенный с ячейкой памяти, и передатчик, соединенный с выходом ячейки памяти.
4. Устройство по п.1, отличающееся тем, что на оптическую маску нанесено поляризационное покрытие с вектором поляризации вдоль зоны просветления и в соответствии с вектором поляризации лазеров.
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2324145C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| CN 103299157 B, 02.03.2016 | |||
| Способ и устройство для регистрации импульсных оптических сигналов в условиях сильной фоновой засветки (варианты) | 2021 |
|
RU2801617C2 |
| СИСТЕМА ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2540451C1 |

