Изобретение относится, к синхронным электродвигателям, в частности, к способу управления синхронным электродвигателем с постоянными магнитами, применяемым в качестве линейного привода для электропогружной насосной установки.
Синхронные двигатели (СД) на постоянных магнитах обладают рядом преимуществ, что позволяет выделить его из всех остальных электрических машин, в частности это стабильность поддерживаемой скорости, что является первостепенным требованием, предъявляемым к различным технологическим процессам, среди которых, добыча пластовых жидкостей посредством электропогружных насосных установок.
На сегодняшний день широко распространены электропогружные насосные установки для добычи скважинных жидкостей с приводом от синхронного электродвигателя вращательного либо поступательного действия.
Принцип управления указанными СД базируется на реализации векторного управления моментом подвижной части электродвигателя, посредством интеллектуальной системы управления источниками переменного тока или напряжения, как правило, посредством реализации широтно-импульсной модуляции (ШИМ).
В литературе и на практике реализованы различные методы векторного управления, большинство из них основаны на определении величин характеризирующих угол положения ротора СД, при этом различают управление с применением датчиков положения ротора и бездатчиковое управление.
В качестве датчика положения ротора обычно используются датчики Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает определенное количество положений на один электрический период, в результате чего на выходе имеются пульсации момента.
Бездатчиковое управление основано на применении блоков «наблюдателей» которые отслеживают обратную электродвижущую силу (ЭДС) во время вращения двигателя. Данная система является малоэффективной при малых оборотах двигателя, когда обратная ЭДС имеет малую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя при низких оборотах.
Общим недостатком всех рассматриваемых систем векторного управления СД является невысокое быстродействие регулирования момента, связанное с наличием момента инерции вращения двигателя.
Альтернативой векторному управлению является прямое управление моментом ПУМ, основным принципом которого является выбор соответствующего вектора напряжения в зависимости от положения вектора магнитного потока ротора, разницы между заданным и реальным крутящим моментом. Прямое управление моментом имеет такие преимущества как хорошее быстродействие по моменту, высокий электромагнитный момент при низких скоростях. Однако работа электропривода с ПУМ сопровождается высокими пульсациями электромагнитного момента, особенно на низких скоростях и реализация такого метода требует выполнения значительных вычислительных операций, что в определенной мере замедляет скорость управления.
Из заявки на изобретение US 20170126160 от 04.05.2017 МПК H02P 27/06 известен способ контроля синхронного электродвигателя с постоянными магнитами, согласно которому измеряют выходные токи, подаваемые на двигатель, которые преобразуют в токи Id, Iq во вращающейся системе координат d-q, после чего определяют требуемое напряжение Ud в зависимости от разности между измеренным током Id и заданным значением Id. Определяют требуемое напряжение Uq в зависимости от разности между измеренным током Iq и заданным значением Iq. Определяют угол инвертора в зависимости от требуемого напряжения Ud и требуемого напряжения Uq. Определяют требуемое напряжение на шине связи с электродвигателем в зависимости от требуемого напряжения Ud и требуемого напряжения Uq. Определяют угол включения преобразователя в зависимости от разности между требуемым напряжением шины и измеренным напряжением шины. Управляют преобразователем электрического привода в зависимости от угла включения инвертора и тем самым создают требуемое напряжение на шине постоянного тока, соединенной между преобразователем и инвертором электрического привода. В результате управляют работой инвертора в зависимости от угла инвертора и, таким образом, формируют шести-пульсный выходной сигнал в виде напряжения, подаваемого на двигатель, без использования ШИМ.
Описанный способ базируется на бездатчиковом определении положения ротора посредством блока «наблюдателя» что приводит к недостаткам связанным с его применением описанными ранее. Также как известно, отсутствие ШИМ позволяет отойти от использования фильтров выходного напряжения, но при этом значительно занижает энергоэффективность системы.
Технической задачей, на решение которой направлено заявляемое изобретение является реализация способа управления синхронным электродвигателем, позволяющего повысить его энергоэффективность с обеспечением оптимальной скорости и точности управления, в широком диапазоне частот.
Технических результат, достигнутый от реализации заявляемого способа, заключается в увеличении точности управления моментом электродвигателя и повышении энергоэффективности электродвигателя, а также, удается достичь увеличения быстродействия систем управления за счет минимизации настроек и исключения сложных вычислений параметров электродвигателя.
Сущность заявляемого способа заключается в реализации алгоритма системы управления синхронным электродвигателем на постоянных магнитах. Согласно описанному способу определяют изменения реактивного тока Iq относительно задания Iqzad, согласно которому формируют корректирующие сигналы напряжения Uq;Ud, которые приводят к величинам, необходим для формирования заданного значения реактивного тока Iqzad.
Согласно предпочтительному варианту реализации способа, формируют значение сигнала напряжения Ud с учетом сигнала обратной связи Uqос из пропорционально-интегрального (ПИ) регулятора тока Iq и задания Uqzad, формируемого исходя из характеристик управляемого электродвигателя.
Также согласно предпочтительному варианту реализации способа, при формировании задания для ПИ-регулятора тока Iq, сигнал Iqzad принимают равным нулю, при этом сигнал задания Uqzad для ПИ – регулятора тока Id, формируют исходя из значения угла между выходным фазным напряжением и фазным током, а также значения номинального напряжения Uном управляемого электродвигателя.
Сущность заявляемого способа поясняется, но не ограничивается следующими графическими материалами.
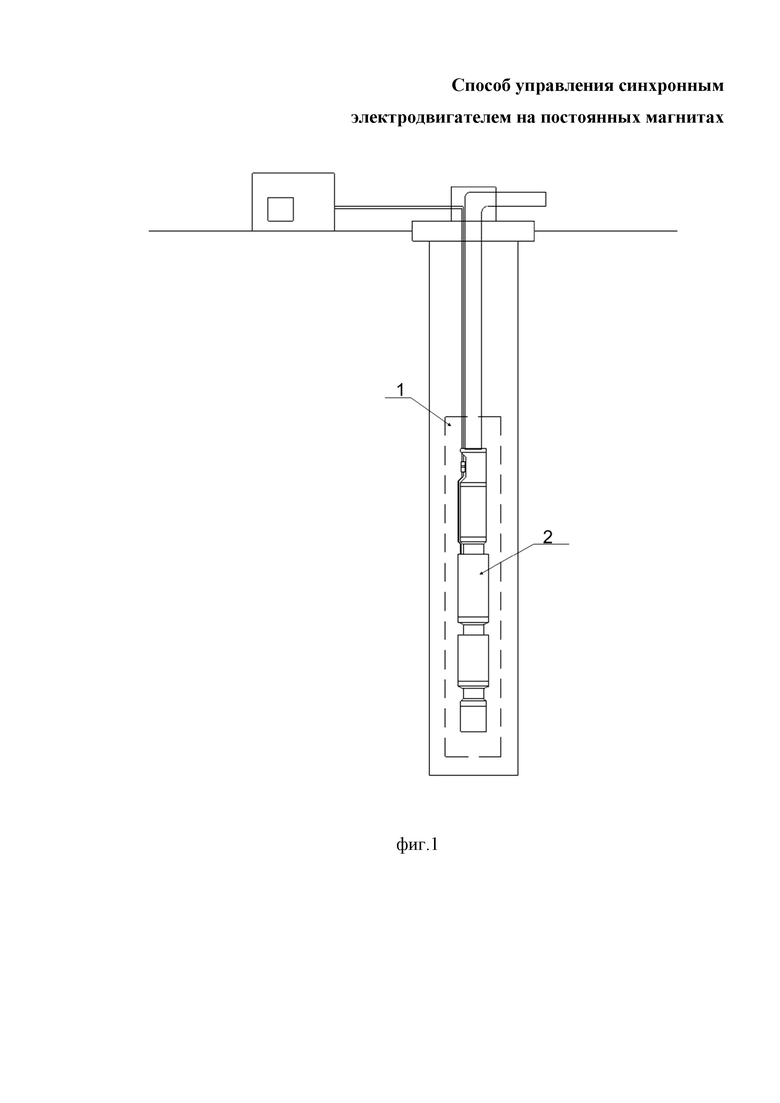
фиг.1 – схема линейной электропогружной насосной установки;
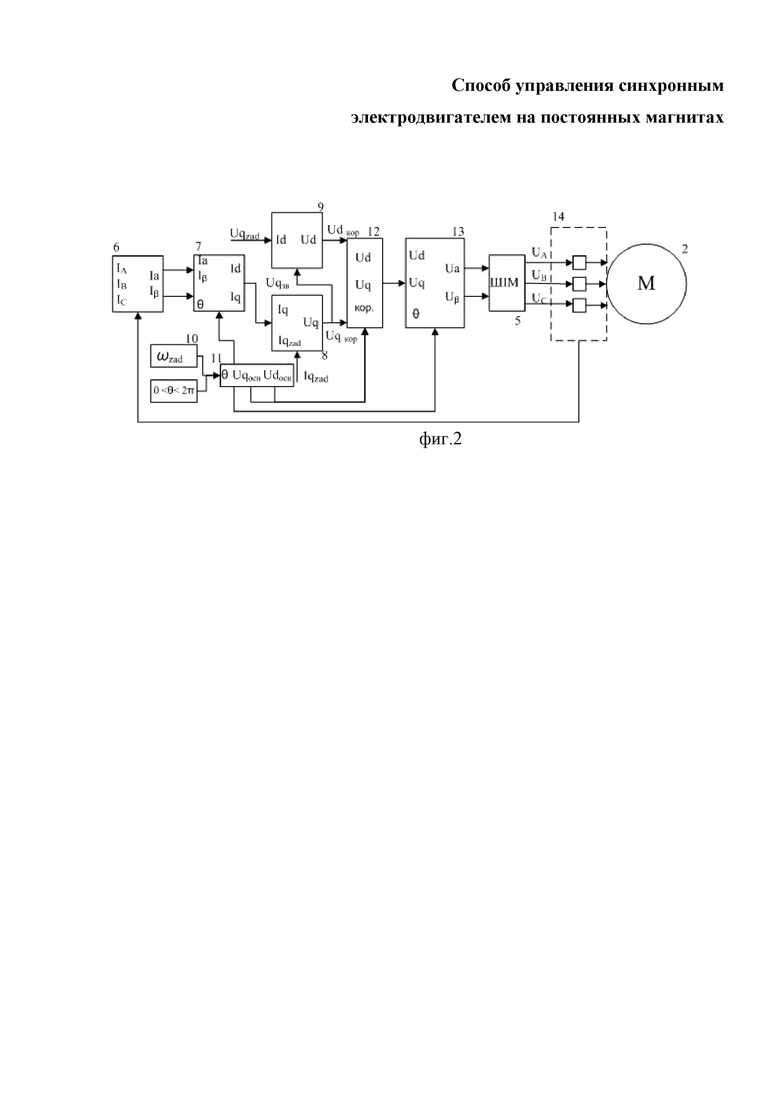
фиг.2 – блок-схема алгоритма управления синхронным электродвигателем на постоянных магнитах.
Описанный способ может быть реализован в системах управления синхронными электродвигателями различного назначения и конструкции.
В качестве одного из возможных вариантов реализации заявляемого способа, представлен пример системы управления синхронным вентильным электродвигателем линейной электропогружной насосной установки 1, которая схематически отображена на (фиг.1) и содержит погружной линейный электродвигатель 2 (фиг. 1;2) с постоянными магнитами, связанный кабельной линией 3 с наземным блоком управления 4.
Управление электродвигателем реализовано программными методами управления, управляемым источником (5) напряжения UA,UB,UC (фиг.2) такими как IGBT транзисторы. Указанная система управления, также содержит, блок (6) преобразования фазных токов IА, IВ, IС, блок (7) преобразования токов Iα, Iβ→Id, Iq, ПИ-регуляторы тока Iq (8), и тока Id (9) формирования напряжений Uq, Ud, блок (10) задания скорости ωzad, блок (11) формирования сигналов угла θ, и основных сигналов напряжений Uqосн, Udосн, блок (12) формирования корректирующих сигналов Uqкор, Udкор, блок (13) преобразования напряжений Ud,Uq→Uα,Uβ, датчики токов (14).
Заявляемый способ заключается в том, что в момент пуска линейного электродвигателя, в блоке (10) формируют задание для круговой частоты ωzad напряжения. Исходя из заданного значения угловой скорости ωzad, в блоке (11), определяют угол допустимого отклонения магнитного поля статора от магнитного поля подвижной части θ, который ограничивают в приделах от 0 до 2π, а также формируют основные сигналы напряжений Uqосн, Udосн.
На следующем этапе, посредством ПИ-регулятора (9) тока Id, определяют значение напряжения Ud с учетом сигнала обратной связи Uqос из ПИ-регулятора (8) тока Iq и задания Uqzad, формируемого исходя из характеристик управляемого электродвигателя, которые содержат значения угла между выходным фазным напряжением и фазным током, а также значения номинального напряжения Uном.
Далее, при корректировании в блоке (12) с учетом, сформированных блоками 8,9 сигналов Ud, Uq основные сигналы напряжений Uqосн,Udосн, и сигнал со значением угла θ из блока 11 поступают на вход блока (13) преобразования напряжения Ud,Uq→Uα,Uβ. Полученные в результате преобразования сигналы напряжения Uα,Uβ поступают на блок преобразования напряжений Uα,Uβ → UA,UB,UC. Полученные сигналы фазных напряжений UA,UB,UC являются заданием для управляемых источников напряжения (5), где посредством широтно-импульсной модуляции (ШИМ) формируются сигналы фазных напряжений, питания линейного электродвигателя насосной установки, посредством чего обеспечивают поступательное движение его подвижной части.
Далее, при поступательном движения, подвижной части линейного электродвигателя, по статорным обмоткам начинают протекать фазные токи IА, IВ, IС, которые в каждый момент времени фиксируются в блоке датчиков (14).
Полученные сигналы с датчиков фиксации фазных токов IА, IВ, IС, поступают на входы блока преобразования фазных токов (6) где выполняется их преобразование в стационарную систему координат α-β. Преобразованные сигналы, подают на блок (7) преобразования координат α-β→d-q и формирования сигналов Id, Iq, с учетом угла θ.
Сигнал Iq используют в качестве обратной связи в ПИ-регуляторе (8) тока Iq, где его вычитают из сформированного сигнала задания Iqzad, который принимают равным нулю, указанный ПИ-регулятор функционально связан с устройством управления, посредством которого задают значения Iqzad, Uqzad, а также значение круговой частоты ωzad.
Полученные на выходе блоков (8,9) сигналы Uqкор, Udкор подают на блок (12) для корректировки основных сигналов напряжения Uqосн, Udосн. Откорректированные в блоке (12) сигналы служат заданием для блоков формирования и преобразования напряжений Ud,Uq→Uα,Uβ.
Таким образом, в процессе работы линейного погружного электродвигателя на постоянных магнитах производится регулировка реактивного тока Iq. При этом также, выполняют регулирование активного тока Id, получая на выходе ПИ-регуляторов (8;9) сигналы напряжения Udкор, Uqкор обеспечивающие необходимое корректирование основных сигналов напряжений Udосн, Uqосн, осуществляя, таким образом, прямое управление моментом электродвигателя.
При этом, в каждый момент времени, определяют положение магнитного поля статора относительно магнитного поля подвижной части электродвигателя посредством измерения сигналов фазных токов с их последующим преобразованием в блоках (6,7,8,9), определяя изменения реактивного тока Iq относительно задания Iqzad, согласно которому формируют корректирующие сигналы напряжения Uqкор, Udкор, которые приводят к величинам необходим для формирования заданного значения реактивного тока Iqzad.
Описанный способ управления позволяет оперативно увеличивать и уменьшать напряжения и токи СД при набросах и сбросах нагрузки.
Реализация заявленного изобретения способствует достижению заявленного технического результата, обеспечивая повышение энергоэффективности электродвигателя, а также увеличение быстродействия системы управления за счет минимизации настроек, посредством исключения сложных вычислений параметров электродвигателя. Указанный способ может быть использован для управления электродвигателями различных типов с учетом изменения сигналов задания ПИ-регуляторов.
Хачатуров Дмитрий Валерьевич
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения надёжности работы электропривода с многоуровневым инвертором | 2020 |
|
RU2743196C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСНОВНОЙ ЧАСТОТНОЙ СОСТАВЛЯЮЩЕЙ НАПРЯЖЕНИЯ ПИТАЮЩЕЙ СЕТИ | 2017 |
|
RU2668330C1 |
| Способ компенсации высших гармоник и повышения качества потребляемой электроэнергии | 2018 |
|
RU2674166C1 |
| Система линейной электропогружной насосной установки | 2020 |
|
RU2747295C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Способ и система оптимизации эксплуатации обводненной газовой или газоконденсатной скважины | 2020 |
|
RU2741173C1 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПРИ МИНИМИЗАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2024 |
|
RU2829487C1 |
| Система и способ векторного управления электродвигателем с постоянными магнитами | 2020 |
|
RU2760227C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Синхронный вентильный электродвигатель с совмещенными обмотками и способ формирования совмещенной обмотки | 2018 |
|
RU2690509C1 |
Изобретение относится к области электротехники и может быть использовано для управления синхронным электродвигателем с постоянными магнитами, применяемым в качестве линейного привода для электропогружной насосной установки. Техническим результатом является увеличение точности управления моментом электродвигателя, повышение энергоэффективности электродвигателя и увеличение быстродействия систем управления за счет минимизации настроек и исключения сложных вычислений параметров электродвигателя. В способе управления синхронным электродвигателем реализуется алгоритм управления синхронным электродвигателем с постоянными магнитами, в частности, применяемым в качестве линейного привода для электропогружной насосной установки. Согласно способу определяют изменения реактивного тока Iq относительно задания Iqzad, согласно которому формируют корректирующие сигналы напряжения Uq и Ud, которые приводят к величинам, необходим для формирования заданного значения реактивного тока Iqzad. 2 з.п. ф-лы, 2 ил.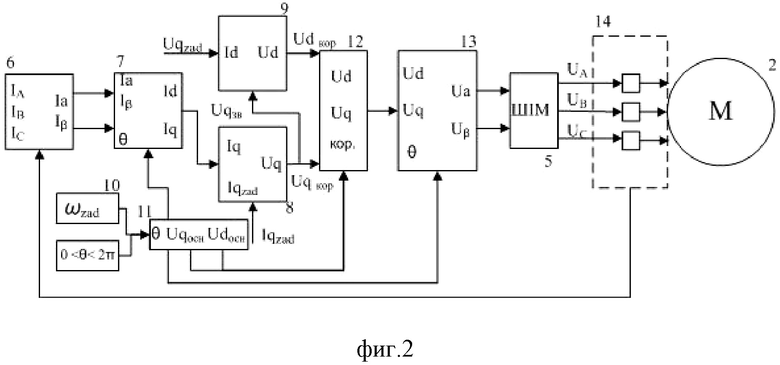
1. Способ управления синхронным электродвигателем на постоянных магнитах, согласно которому задают величины, характеризующие подаваемое напряжение и фазу, измеряют фазные токи с преобразованием полученных значений в неподвижную систему координат d-q, исходя из которых формируют сигналы напряжений Ud; Uq, посредством преобразования сигналов напряжения Ud; Uq→UαUβ формируют сигналы задания фазного напряжения UA, UB, UC, которые подают на блок формирования импульсов управляемых источников напряжения, отличающийся тем, что определяют изменения реактивного тока Iq относительно задания Iqzad, согласно которому формируют корректирующие сигналы напряжения Uqкор., Udкор., которые приводят к величинам, необходимым для формирования заданного значения реактивного тока Iqzad.
2. Способ управления синхронным электродвигателем на постоянных магнитах по п.1, отличающийся тем, что значение сигнала напряжения Udкор. формируют с учетом сигнала обратной связи Uqос из ПИ-регулятора тока Iq и задания Uqzad, формируемого исходя из характеристик управляемого электродвигателя.
3. Способ управления синхронным электродвигателем на постоянных магнитах по п.1, отличающийся тем, что при формировании задания для ПИ-регулятора тока Iq сигнал Iqzad принимают равным нулю, при этом сигнал задания Uqzad для ПИ–регулятора тока Id формируют исходя из значения угла между выходным фазным напряжением и фазным током, а также значения номинального напряжения Uном управляемого электродвигателя.
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ ДВИГАТЕЛЯ С СИНХРОНИЗАЦИЕЙ НА ПОСТОЯННОМ МАГНИТЕ | 2006 |
|
RU2397601C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ БЕЗ ИСПОЛЬЗОВАНИЯ ДАТЧИКОВ ПОЛОЖЕНИЯ | 2012 |
|
RU2560090C1 |
| DE 19636784 A1, 13.03.1997 | |||
| US 2017126160 A1, 04.05.2017 | |||
| US 8742705 B2, 03.06.2014 | |||
| СВЕТОВОЗВРАЩАЮЩИЙ МАТЕРИАЛ | 1994 |
|
RU2075906C1 |
| JP 4272352 B2, 03.06.2009 | |||
| WO 2015118678 A1, 13.08.2015. | |||

