Заявляемое изобретение относится к области управления электротехническим оборудованием, в частности к системам и способам управления, частотно регулируемым приводом для электродвигателей лифтового оборудования.
Современный лифтовый электропривод должен соответствовать всем требованиям эксплуатирующих организаций, обеспечивая высокую точность управления, плавность движения, а также безопасность и удобство эксплуатации.
Известно, что после остановки кабины лифта, ее фиксирую тормозным устройством, при этом загруженность кабины может существенно изменится, перед очередным стартом. Далее, в момент отпуска тормоза и запуска электродвигателя лебедки лифта, происходит откат кабины, из-за времени задержки системы управления, необходимого для формирования момента на валу электродвигателя, достаточного для отработки задания нулевой скорости в момент отпуска тормоза. В зависимости от построения системы управления, метода определения и формирования необходимого момента электродвигателя, время задержки может достигать нескольких миллисекунд, чего вполне достаточно, для снижения уровня комфорта и безопасности эксплуатации лифта.
Из уровня техники известно изобретение CN 1385353 A от 21.11.2001 «Метод управления запуском двигателя для лифта», согласно которому при старте кабины лифта предварительно раскручивают двигатель и определяют момент вращения, при отпускании тормоза определяют изменение момента и формируют команду с заданием выходного крутящего момента согласно нагрузке.
К недостаткам такого метода можно отнести зависимость от скорости вычислений системы управления частотно регулируемого привода.
Также из патента на изобретение EP 1885640 B1 от 09.05.2005 известен Способ управления устройством привода лифта, содержащий этапы формирования схемы управления электропривода лифта и подачи сигнала предварительного крутящего момента. В схему управления, где сигнал предварительного крутящего момента адаптирован в качестве управляющего сигнала для удержания кабины лифта после отпускания тормоза для удержания кабины. Определяют сигнал ошибки отслеживания, полученный из разницы между сигналом команды управления скоростью и сигналом обнаруженной скорости приводного устройства лифта, кроме того, учитывают сигнал веса нагрузки связанной с загрузкой кабины лифта.
К недостаткам такого метода можно отнести необходимость использования дополнительных средств определения загруженности кабины лифта, а также зависимость от скорости вычислений системы управления частотно регулируемого привода.
В качестве ближайшего аналога принято решения известное из патента на изобретение CN 110803600 A «Метод компенсации пускового момента без датчика веса, специально для лифта», согласно которому, двигатель лифта использует синусоидальный и косинусный энкодер для измерения скорости и положения ротора. Известный метод включает в себя следующие этапы.
1. После остановки лифта фиксируют измеренные значения энкодера с текущим положением лифта.
2. После открывания двери лифта система управления активирует алгоритм компенсации запуска без взвешивания. В это время система управления формирует задание скорости V=0 м/с. Предустановленные параметры PI используются в качестве параметров настройки контура скорости двигателя.
Предварительно установленные параметры PI, превышающие нормальные рабочие параметры, принимаются в качестве параметров регулировки контура скорости двигателя, и когда лифт скользит из-за неуравновешенной силы, фиксируется начальное направление смещения; устанавливаются порог смещения и порог скорости, и когда амплитуда смещения лифта превышает порог смещения или порог скорости, неуравновешенный крутящий момент компенсируется в направлении, противоположном направлению движения лифта, чтобы предотвратить движение лифта. В процессе перезапуска без взвешивания, когда лифт движется в направлении, противоположном начальному движению, значение тока запуска, соответственно уменьшается, чтобы уменьшить вероятность вибрации.
К недостаткам такого метода можно отнести зависимость работы системы от точности настройки (фазировки) энкодера, также может возникнуть необходимость в проведении отдельного этапа пусконаладочных работ, что в целом снижает удобство эксплуатации.
Удержание кабины лифта в неподвижном положении в момент пуска электродвигателя и плавный старт без отката кабины, является одной из технических задач, на решение которой направлено заявленное изобретение.
Технический результат, достигнутый от реализации заявленного способа, заключается в повышении плавности движения кабины лифта и защите электродвигателя от существенных бросков тока.
Сущность заявленного изобретения заключается в обеспечении способа управления лифтового электропривода, согласно которому формируют схему управления, посредством которой обеспечивают контроль и регулирование, по меньшей мере, параметров тока электродвигателя, формируют задание скорости V=0 м/с, при этом формируют сигнал пускового тока и создают крутящий момент электродвигателя достаточный для удержания кабины лифта после отпускания тормоза, при этом учитывают загруженность кабины лифта. При каждом следующем, после остановки кабины лифта, запуске электродвигателя задают ненулевые начальные значения пускового тока, при этом учитывают параметры тока электродвигателя, полученные в момент остановки кабины лифта, и задают время достижения задания ненулевого начального значения пускового тока, после снятия тормоза.
Согласно преимущественному варианту реализации изобретения, время достижения задания ненулевого начального значения пускового тока электродвигателя устанавливают с учетом мощности управляемого электродвигателя. Также заданное ненулевое начальное значение пускового тока электродвигателя получают постепенным увеличением пускового тока электродвигателя по линейному закону.
Сущность заявленного изобретения поясняется, но не ограничивается приведенными графическими материалами:
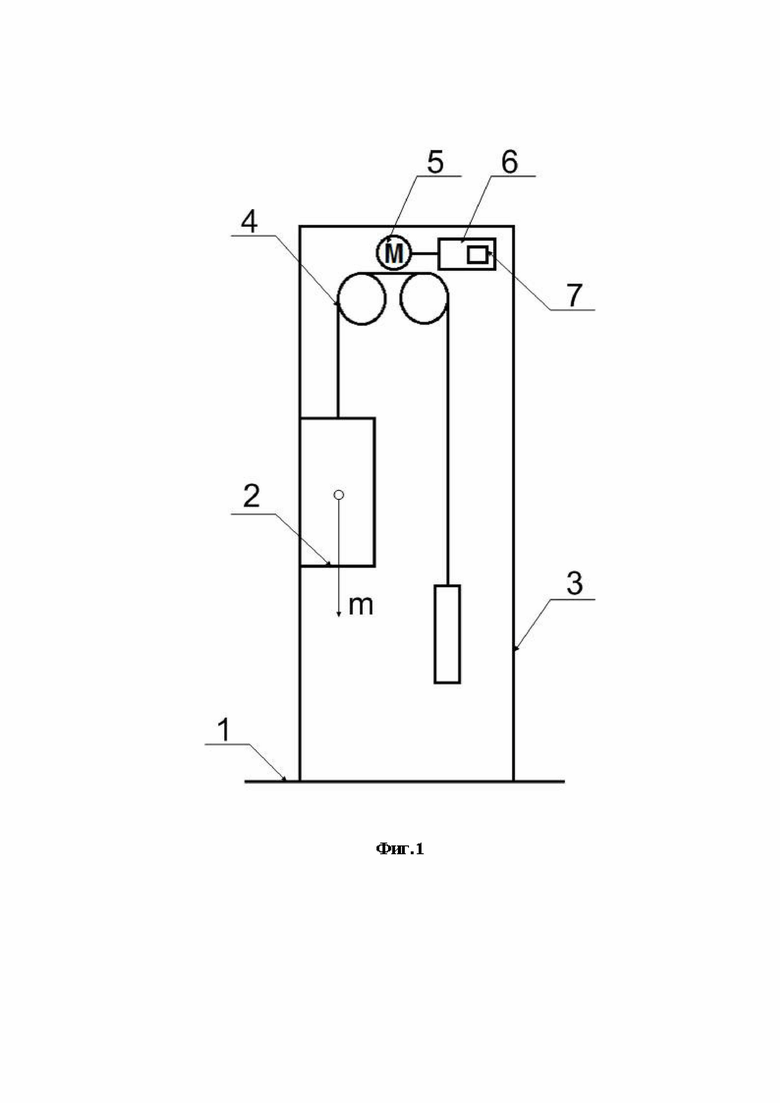
фиг.1 – принципиальная схема лифтовой установки;
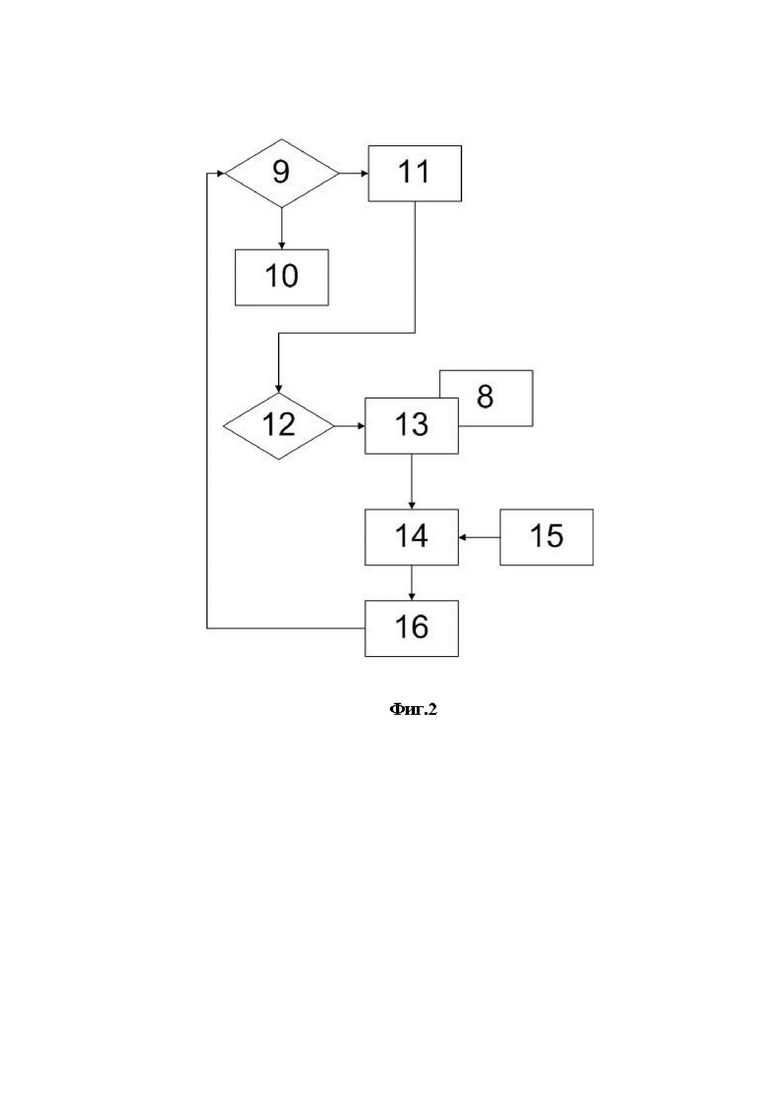
фиг.2 – блок-схема системы управления лифтового электропривода.
Согласно заявляемому изобретению формируют схему управления лифтового электропривода, которая обеспечивает управление лифтовой установкой 1 (фиг.1). В одном из возможных вариантов реализации изобретения, лифтовая установка 1 содержит кабину лифта 2, установленную в лифтовой шахте 3. Кабина лифта 2 приводится в движение лебедкой 4 оснащенной электродвигателем 5, где система управления лебедкой реализована на базе частотно регулируемого лифтового электропривода (ЧРЛП) 6. Система управления лифтового электропривода обеспечивает высокую точность регулирования скорости и тока электродвигателя, что позволяет обеспечить высокий уровень комфорта и безопасность эксплуатации. Преимущественно систему управления реализуют на базе микропроцессорного модуля 7, указанного ЧРЛП 6.
Посредством системы управления обеспечивают контроль и регулирование, по меньшей мере, параметров тока электродвигателя 5 с целью отработки задания скорости V=0 м/с.
В регуляторе скорости 8 реализованном на базе микропроцессорного модуля 7, формируют сигнал пускового тока Iп электродвигателя, посредством которого создают крутящий момент, достаточный для удержания кабины лифта 2 после отпускания тормоза, при этом учитывают загруженность кабины лифта (нагрузки) «m».
На первом этапе 9 (фиг.2) реализации способа, система управления лифтового привода фиксирует загруженность кабины лифта 2 в момент остановки. Согласно преимущественному варианту реализации изобретения на этапе 9, в момент 10 наложения тормоза, запоминают текущую нагрузку 11 от кабины лифта, которую приводят к величине активного тока электродвигателя 5. Полученное на этапе 11, значение активного тока используют, на следующем этапе, при очередном запуске электродвигателя 5, в частности, на этапе 12, формируют задание пускового тока Iп, согласно которому, до момента снятия тормоза, значение пускового тока электродвигателя приводят к значению активного тока до момента остановки, полученного на этапе 11. Ненулевое значение пускового тока электродвигателя, позволяет создать предварительный момент на валу электродвигателя 5 для удержания кабины лифта в статическом положении в момент снятия тормоза.
В ходе формирования задания 12 пускового тока Iп, на этапе 13, после снятия тормоза, система управления посредством регулятора скорости 8, определяет разницу между необходимым значением активного тока и текущим для выполнения задания по скорости V=0 м/с, после чего, на этапе 14 подачи пускового тока Iп, снижают или повышают значение активного тока электродвигателя, исходя из полученной разницы значений, обеспечивая высокую эффективность и быстродействие регулятора скорости, также на этапе 14 значение активного тока, может остаться неизменным, например, в том случае, когда загрузка кабины лифта осталась неизменной на этапах 9, 12. Таким образом, регулятор скорости 8 обеспечивает необходимое значение активного тока для отработки задания скорости в момент снятия тормоза V=0 м/с.
С целью реализации безударного пуска электродвигателя, на этапе 14 подачи пускового тока, обеспечивают сглаживание 15 обратной ЭДС в обмотках электродвигателя путем формирования задания времени достижения ненулевого начального значения пускового тока, после снятия тормоза. Задание времени достижения ненулевого начального значения пускового тока электродвигателя, устанавливают с учетом мощности управляемого электродвигателя. Задание времени реализуют за счет постепенного увеличения пускового тока электродвигателя по линейному закону. Далее, на этапе 16 ЧРЛП выходит на рабочий режим, обеспечивая питание электродвигателя 5 лебедки, до момента очередной остановки кабины лифта 2.
Реализация заявленного изобретения обеспечивает достижение указанного технического результата, повышая плавности движения кабины лифта и обеспечивая защиту электродвигателя от существенных бросков тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автофазировки датчика углового положения ротора электродвигателя системы лифтового привода | 2020 |
|
RU2758200C1 |
| Способ повышения надёжности работы электропривода с многоуровневым инвертором | 2020 |
|
RU2743196C1 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
| Способ и система оптимизации эксплуатации обводненной газовой или газоконденсатной скважины | 2020 |
|
RU2741173C1 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ЛИФТА | 2013 |
|
RU2561682C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЛИФТОВ | 2011 |
|
RU2584037C2 |
| Система и способ векторного управления электродвигателем с постоянными магнитами | 2020 |
|
RU2760227C1 |
| Способ динамической компенсации искажения напряжения | 2018 |
|
RU2689776C1 |
| Способ компенсации высших гармоник и повышения качества потребляемой электроэнергии | 2018 |
|
RU2674166C1 |
| Устройство и способ управления движением кабины лифта | 2015 |
|
RU2655257C1 |
Формируют схему управления лифтового электропривода, посредством которой обеспечивают контроль и регулирование параметров тока электродвигателя. Формируют задание скорости V=0 м/с, при этом формируют сигнал пускового тока и создают крутящий момент электродвигателя, достаточный для удержания кабины лифта после отпускания тормоза. При этом учитывают загруженность кабины лифта. При каждом следующем, после остановки кабины лифта, запуске электродвигателя задают ненулевые начальные значения пускового тока, при этом учитывают параметры тока электродвигателя, полученные в момент остановки кабины лифта, и задают время достижения задания ненулевого начального значения пускового тока после снятия тормоза. Достигается повышение плавности движения кабины лифта и защита электродвигателя от существенных бросков тока. 2 з.п. ф-лы, 2 ил.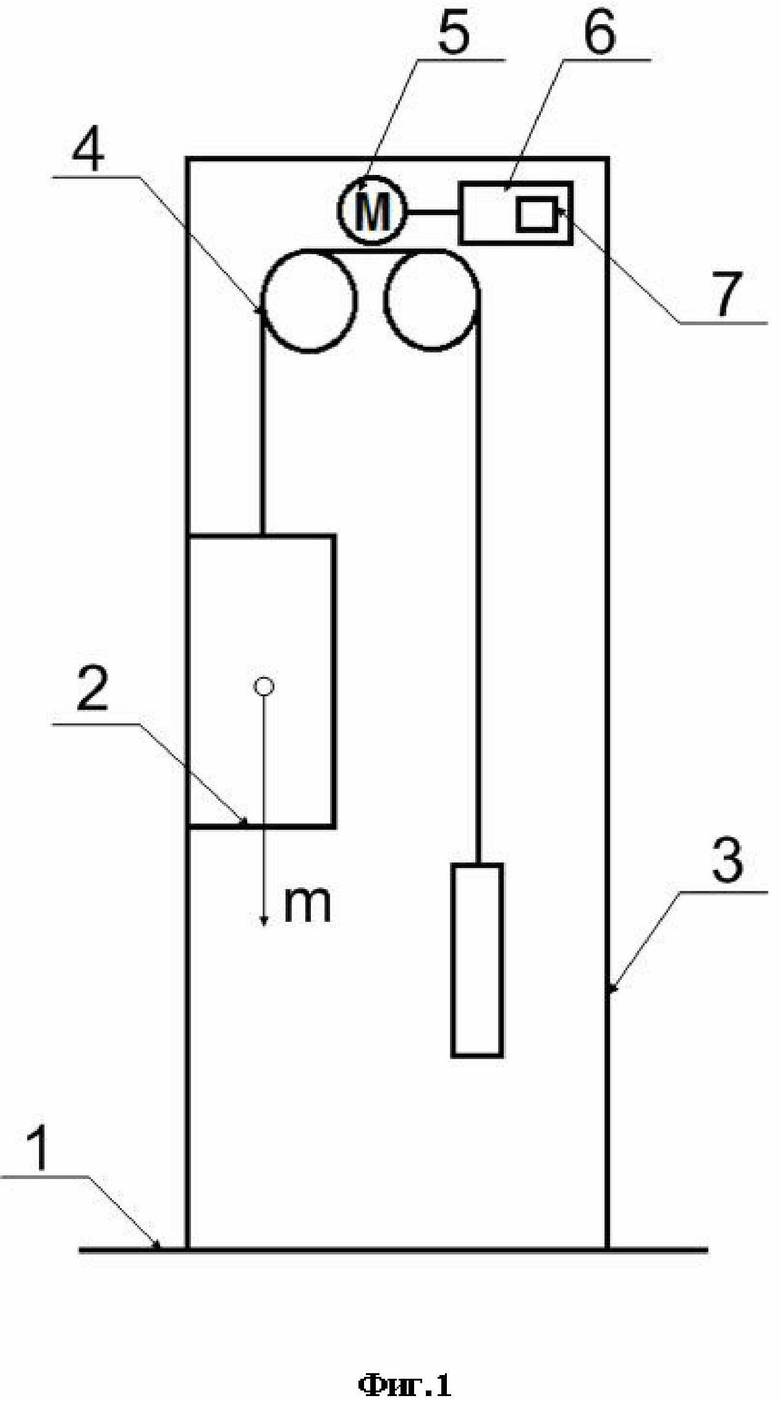
1. Способ управления лифтового электропривода, согласно которому формируют схему управления лифтового электропривода, посредством которой обеспечивают контроль и регулирование, по меньшей мере, параметров тока электродвигателя, формируют задание скорости V=0 м/с, при этом формируют сигнал пускового тока и создают крутящий момент электродвигателя, достаточный для удержания кабины лифта после отпускания тормоза, при этом учитывают загруженность кабины лифта, отличающийся тем, что при каждом следующем, после остановки кабины лифта, запуске электродвигателя задают ненулевые начальные значения пускового тока, при этом учитывают параметры тока электродвигателя, полученные в момент остановки кабины лифта, и задают время достижения задания ненулевого начального значения пускового тока после снятия тормоза.
2. Способ управления лифтового электропривода по п.1, отличающийся тем, что время достижения задания ненулевого начального значения пускового тока электродвигателя устанавливают с учетом мощности управляемого электродвигателя.
3. Способ управления лифтового электропривода по п.1, отличающийся тем, что заданное ненулевое начальное значение пускового тока электродвигателя получают постепенным увеличением пускового тока электродвигателя по линейному закону.
| WO 2006119787 A1, 16.11.2006 | |||
| US 5424498 A, 13.06.1995 | |||
| US 5531294 A, 02.07.1996 | |||
| US 3872949 A, 25.03.1975. |

