Изобретение относится к области электротехники и может использоваться для минимизации потерь электроэнергии, бездатчикового регулирования электродвигателей с постоянными магнитами, в том числе для электронасосов нефтяных скважин, а также электродвигателей применяемых в промышленности и городском хозяйстве.
В настоящее время внедрение регулируемого электропривода (ЭП) в энергетике, промышленности, жилищно-коммунальном хозяйстве и других отраслях направлено на экономию электроэнергии.
Высокая эффективность применения автоматизированного электропривода для регулирования параметров и оптимизации работы различных технологических систем с механизмами, особенно с насосными и вентиляционными установками, работающими в переменных режимах, подтверждена многолетним мировым опытом.
Эффективность работы предприятий нефтяной промышленности, водоснабжения, отопления, городов и сельских районов может быть существенно повышена за счет автоматизации и внедрения частотно регулируемых электроприводов (ЧРП).
Сравнив величины энергопотребления с использованием ЧРП и при использовании дроссельной заслонки, экономия электроэнергии в 42 % при применении преобразователя по сравнению с регулированием заслонкой.
Из расчета эффективности применения электродвигателей с векторным управлением в нефтяной промышленности известны преимущества, связанные с использование векторного управления в нефтяной промышленности (http://earchive.tpu.ru/bitstream/11683/25303/1/TPU177822.pdf) дата обращения 03.03.2020.
Высокая плавность регулирования скорости также является одним из основных достоинств такой системы.
При этом реализация векторного управления погружным электродвигателем имеет определенные сложности, связанные с учетом погрешности вызванной наличием длинной кабельной линии более 2000 м, а также сложностью настройки системы управления ЧРП под определенный тип электродвигателя с постоянными магнитами.
Заявленное изобретение направлено на решение недостатков известного уровня техники.
Из патента на изобретение RU 2132110 «Способ оптимального векторного управления асинхронным электродвигателем», при котором питают статорные обмотки переменным током, амплитуду и угол фазового сдвига которого относительно вектора потокосцепления ротора регулируют. При этом фазные токи равны разности синхронно изменяемых с частотой синхронизации синфазного и ортофазного токов, заданный момент изменяют в зависимости от рассогласования заданной и текущей скорости, при этом измеряют токи в трех фазах статора.
Также из патента на изобретение US7299708B2 известен способ оценки угла ротора для электродвигателя с постоянным магнитом.
При построении блока наблюдателя угол ротора оценивается через контур фазовой синхронизации (с компенсацией фазовой ошибки).
Магнитный поток ротора определяют из напряжения статора (фактического напряжения или управляющего напряжения), тока, сопротивления и индуктивности.
Ошибка оценки угла ротора (изменение сопротивления статора из-за температуры) удаляется с помощью нового корректора угловых ошибок. Этот корректор основан на компенсации реактивной мощности и нечувствителен к изменению сопротивления. Кроме того, для эталонной модели корректора угла требуется только один параметр индуктивности.
В статических режимах работы электропривода в основной зоне регулирования происходит минимизация потребляемого тока статора для создания момента, равного моменту нагрузки, что снижает суммарные потери мощности в системе "инвертор - силовой кабель - асинхронный электродвигатель", снижает потери напряжения в силовом кабеле, например, в глубинном погружном кабеле в нефтедобыче.
К недостаткам известного способа можно отнести то, что система не позволяет осуществить настройку при работающем двигателе, а также не учитывает характеристик промежуточных элементов линии связи, обладающих собственной индуктивностью, емкостью и сопротивлением.
Технической задачей, на решение которой направлено заявленное изобретение является создание системы и способа векторного управления вентильным двигателем высокой точностью регулирования и адаптивной системой управления и настройки широкой номенклатуры двигателей с постоянными магнитами.
Технический результат, достигнутый от реализации изобретения заключается, в минимизации потерь электроэнергии при реализации векторного управления двигателем с постоянными магнитами (далее по тексту ВУВД), вызванной повышением точности регулирование и расширением номенклатуры управляемых электродвигателей.
Сущность заявляемого изобретения заключается в том, что при переходе в режим векторного управления задают частоту перехода. В ходе формирования сигналов напряжения и частоты управления электродвигателем учитывают параметры промежуточных элементов включенных в линию связи электродвигателя с управляемым источником питания, при этом определяют индуктивность, сопротивление и емкость включенных в линию связи элементов, в частности трансформатора, синусного фильтра, а также кабельной линии. Указанные параметры приводят к значениям, на одной из сторон трансформатора, после чего суммируют и относят к эквивалентным параметрам статора электродвигателя. Используя удаленное средство управления, изменяют, контролируют и отображают набор параметров управляемого электродвигателя и линии связи в режиме реального времени работы электродвигателя. Указанный набор параметров включает, по меньшей, мере параметры активного, реактивного тока и скорости двигателя, параметры индуктивности по осям, потокосцепление ротора, момент вращения электродвигателя при переходе в режим векторного управления на заданной частоте.
Удаленное средство управления выполняют в виде аппаратно-программного комплекса включающего центральный процессор на базе которого формируют блоки сбора, корректировки, обработки и визуализации рабочих параметров управляемого электродвигателя в режиме реального времени работы электродвигателя, при этом в центральном процессоре реализуют блоки регулирования параметров активного и реактивного тока, скорости, частоты, индуктивности по осям, момента пуска электродвигателя, а также блок построения интерактивных графиков с изменяемой пользователем частотой обновления информации. Формируемые графики выводят на дисплей удаленного средства управления в режиме реального времени.
Согласно преимущественному варианту реализации изобретения, в режиме реального времени, включают в работу блок определения параметров схемы замещения электродвигателя. Определяют, по меньше мере, параметры индуктивностей по осям ротора и момент инерции ротора электродвигателя исходя из которых формируют сигналы задания для управляемого источника питания на регулирование активного и реактивного тока, а также скорости электродвигателя.
Сущность заявленного изобретения поясняется, но не ограничивается приведенными графическими материалами:
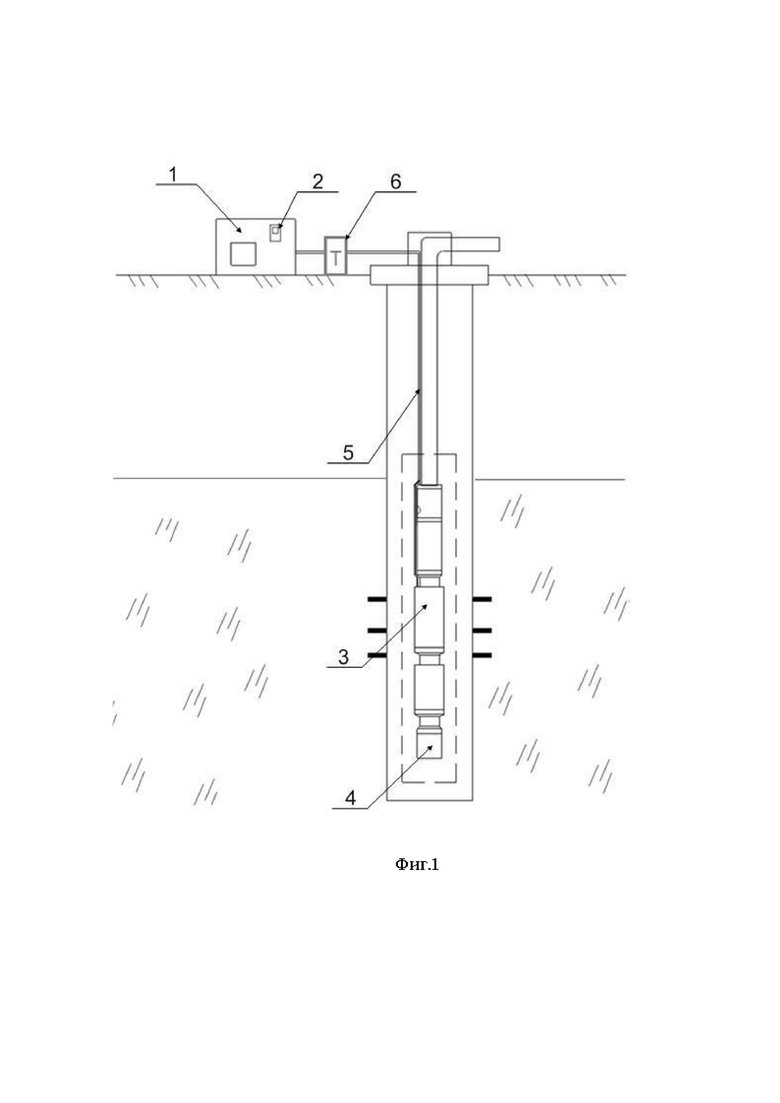
фиг.1 - принципиальная схема управления погружным вентильным электродвигателем;
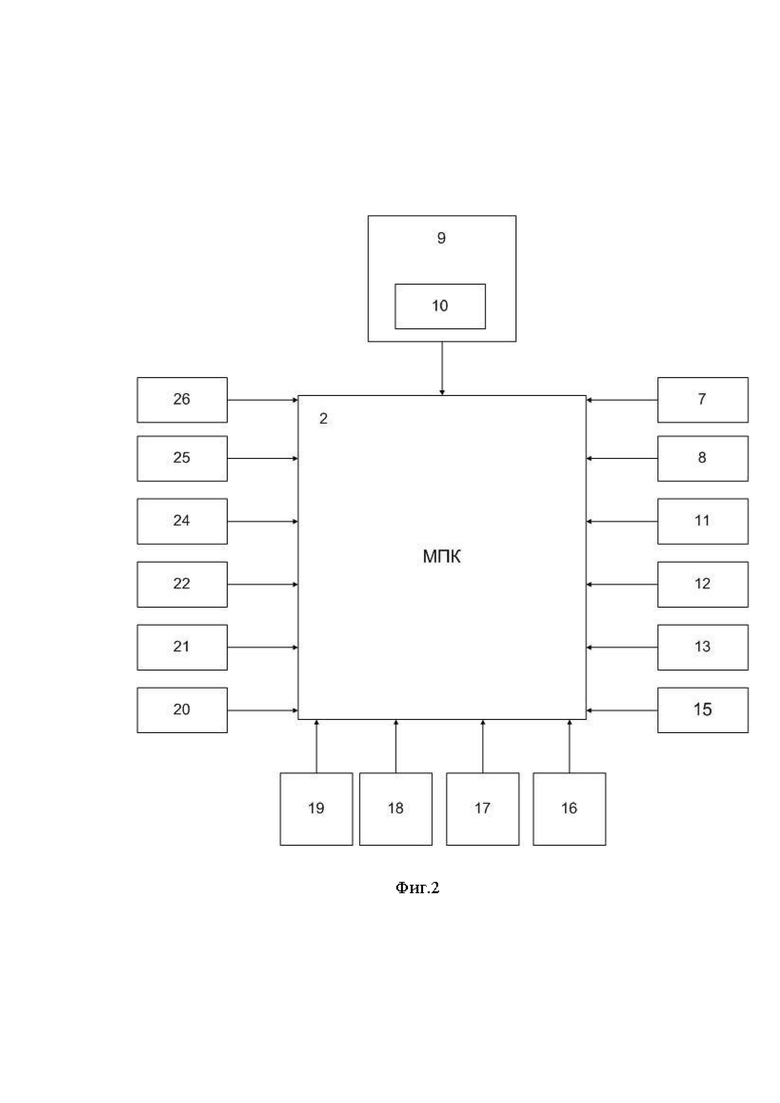
фиг.2 - принципиальная блок-схема средства управления (СУ);
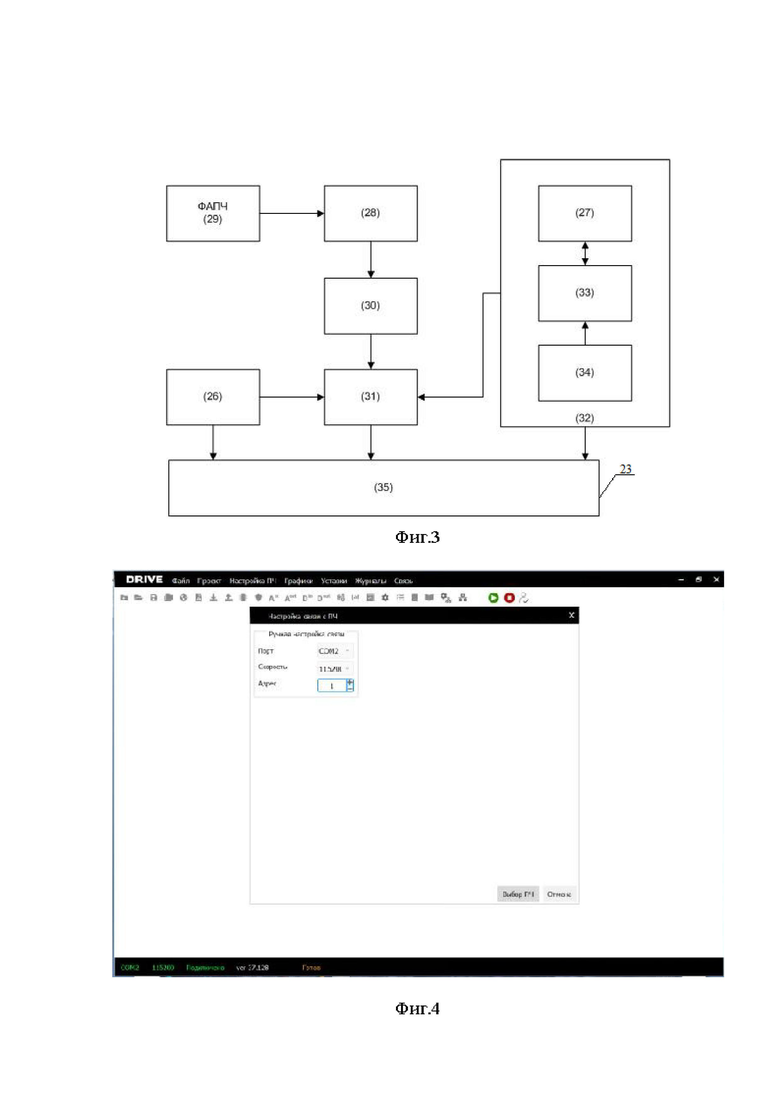
фиг.3 - принципиальная блок-схема системы управления ЧРП;
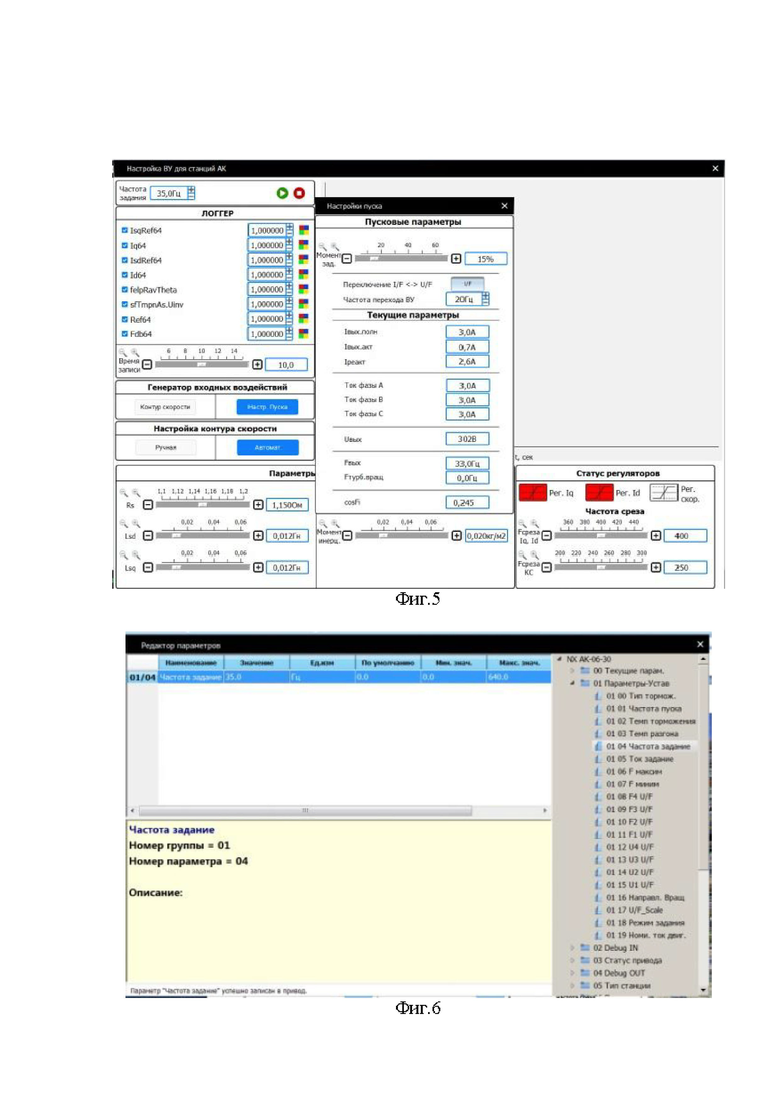
фиг.4 - пример графического интерфейса средства управления (СУ).
фиг.5 - вариант директории интерфейса СУ с основными параметрами системы регулирования электродвигателя;
фиг.6 - директория интерфейса СУ с отображаемыми параметрами для настройки системы во вкладках директории;
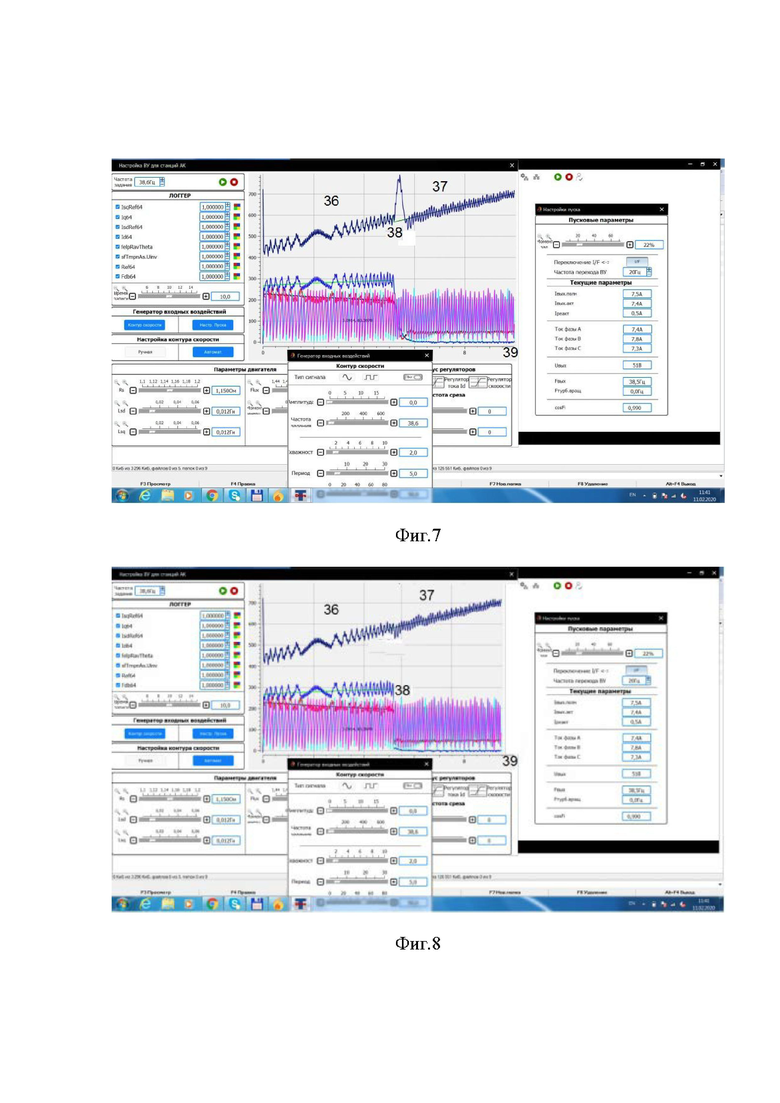
фиг.7 - вариант графического отображения работы системы в режиме реального времени с явным переходным процессом;
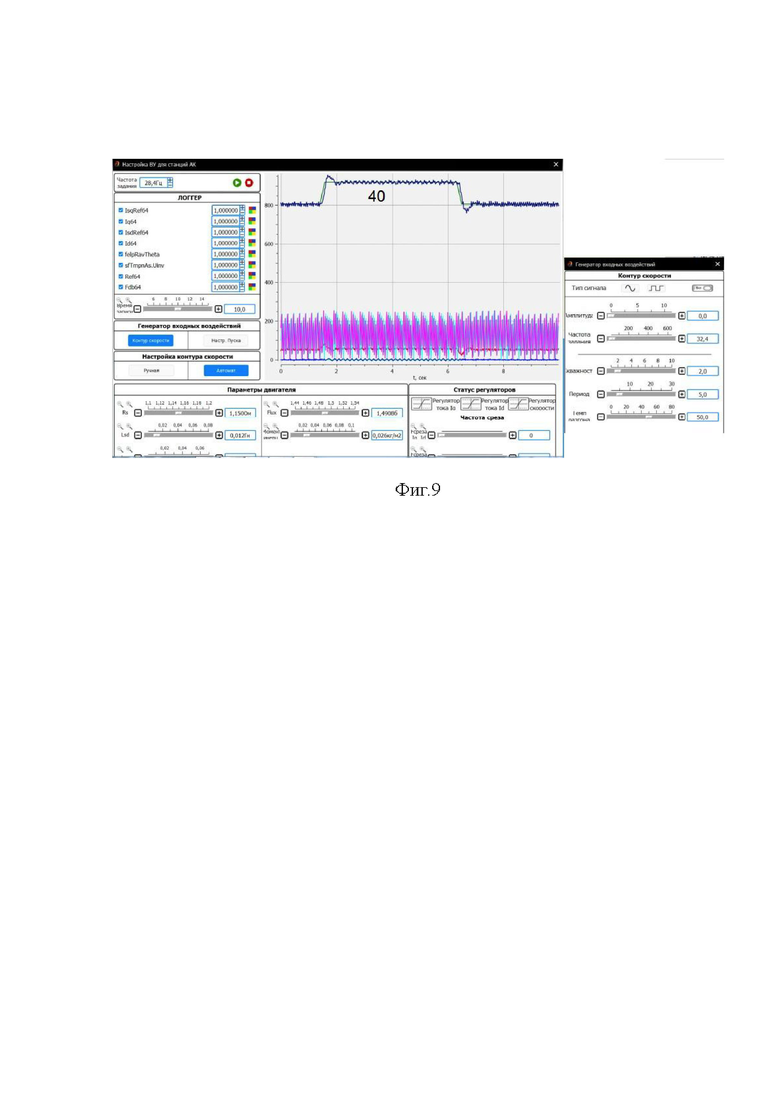
фиг.8 - вариант графического отображения работы системы в режиме реального времени со сглаживанием переходных процессов по скорости;
фиг.9 - поддержание частоты и скорости электродвигателя согласно заданию в режиме реального времени.
Заявляемое изобретение может быть реализовано в преимущественном большинстве технологических процессов связанных использованием частотно регулируемых приводов (ЧРП) управления электродвигателями с постоянными магнитами. Электродвигатели с постоянными магнитами, благодаря своей экономичности находят все большее применение в промышленности, что приводит постоянному расширению номенклатуры таких двигателей, а также увеличению количества производителей. Каждый двигатель с постоянными магнитами имеет собственные конструктивные и эксплуатационные характеристики, которые необходимо учитывать при реализации системы векторного управления (ВУВД).
Одной из отраслей с широким применением двигателей с постоянными магнитами в сложных условиях эксплуатации является нефтедобывающая промышленность, где использование и внедрение векторного управления позволяет сократить затраты электроэнергии на 25%.
На примере управления погружным электродвигателем с постоянными магнитами электроцентробежного насоса, рассмотрим вариант реализации заявляемого изобретения (фиг.1).
Система ВУВД включает управляемый источник питания 1 в виде частотно регулируемого привода (ЧРП) с автоматизированной системой управления на базе средства управления СУ (2), представленного программируемого микропроцессорным контроллером (ПМК) или другим известными мобильным вычислительным устройством, а также управляемый вентильный электродвигатель с постоянными магнитами 3 (ВД).
Система управления связана с элементами системы измерения параметров ВД 3 и линии связи. Указанная система измерения обеспечивает сбор данных таких как: сопротивление электродвигателя, фазные входные и выходные напряжения, сопротивление, индуктивность и емкость элементов линии связи, параметры турбинного вращения электродвигателя (исходя из данных системы телеметрии 4).
Линия (канал) связи включает, по меньшей мере, кабельную линию 5, а также промежуточные звенья, такие как, трансформатор 6, синусный фильтр (на изображениях не показан) и другие элементы с собственной индуктивностью, сопротивлением и емкостью.
Собранные данные о перечисленных параметрах поступают на блоки обработки данных центрального процессора (ЦП) ПМК.
Средство управления 2 (фиг.2), на базе которого реализована система управления, содержит блоки определения угла 7 и частоты 8 ротора электродвигателя 3, блок корректировки 9 оценочного угла ротора включающего модуль 10 фазовой автоподстройки частоты ФАПЧ. В системе также предусмотрены блоки 11, 12 преобразования координат (преобразователи Парка-Кларка), блок 13 формирования сигналов управления инверторным модулем 14 управляемого источника питания для формирования сигналов широтно-импульсной модуляции ШИМ, а также блок 15 определения параметров схемы замещения электродвигателя. Также на безе СУ может быть реализован ряд других вспомогательных блоков применяемых для общепринятой схемы реализации системы векторного управления, которые известны из уровня техники и могут быть реализованы дополнительно.
В целях решения проблемы недостаточной точности управления погружными вентильными электродвигателями, связанной с наличием в линии (канале) связи с ЧРП промежуточных элементов, таких как длинная кабельная линия 5, трансформатор 6 и синусный фильтр, на базе СУ сконфигурирован блок 16 учета параметров индуктивности, сопротивления и емкости.
Расширение эксплуатационных возможностей системы достигается путем реализации функций управления параметрами электродвигателя и линии связи, которые включают блоки сбора 17, обработки 18, корректировки (адаптации) 19, сравнения и визуализации 20 состояния элементов системы на базе средства управления (СУ) которое может включатся в автоматизированную систему управления в режиме реального времени. Реализация описанных функций системы возможна на базе ПМК ЧРП, так и на базе других известных вычислительных средств, при наличии необходимых аппаратных компонентов.
Указанное средство (СУ) управления может быть представлено в виде удаленной электронной вычислительной машины и связываться с ЧРП посредством блока 21 проводных RS485/232 и беспроводных 22 интерфейсов связи (GPRS, WIFI).
Блок 20 обеспечивает отображение состояния систем на дисплее 23 (фиг.3) средств управления. Графически отображаемый набор параметров может изменяться пользователем в зависимости от условий эксплуатации и особенностей технологического процесса. Указанный набор параметров включает, по меньшей мере, параметры активного, реактивного тока и скорости двигателя, параметры индуктивности по осям, потокосцепление ротора, момент вращения двигателя при включении векторного управления, напряжение звена постоянного тока (ЗПТ) и другие.
Работа системы в режиме реального времени основана на периодическом мониторинге параметров тока фиксируемых блоком засинусных датчиков тока 24 ЧРП, не менее, одного раза в один такт ШИМ. Данные из указанных датчиков после прохождения блоков определения параметров электродвигателя, обрабатываются в блоке 25 сравнения реальных параметров с заданными. Результаты сравнения отображаются в графическом виде, частота обновления интерактивных графиков задается пользователем и привязана к такту ШИМ. Скорость передачи сигнала обеспечивается оптимизацией схемы электронных компонентов блоков электроники.
Также на базе ЦП средства управления, реализован блок 26 выравнивания по фазе данных с информацией о напряжении звена постоянного тока ЧРП с учетом задержки в канале передачи сигналов управления, по меньшей мере, на один такт ШИМ, что позволяет задавать сигналы управления, предупреждая возможные состояния системы.
Способ реализации векторного управления вентильным электродвигателем с постоянными магнитами, согласно описанной схеме (фиг.4), на базе управляемого источника питания ЧРП с автоматизированной системой управления (АСУ. Указанная АСУ включает программируемый микропроцессорный контроллер (ПМК) с элементами системы измерения параметров электродвигателя и линии связи, согласно которым, формируют сигналы управления электродвигателем. Также система управления может быть дополнена средством управления, например удаленным с реализованной средой управления параметрами электродвигателя в режиме реального времени.
Согласно общепринятому принципу реализации векторного управления вентильными двигателями, посредством ЧРП управляют частотой и выходными напряжением.
В ходе реализации ВУВД задают вручную или управляют автоматически частотой перехода к векторному управлению (27), определяют параметры угла и частоты ротора (28), выполняют корректировку оценочного угла ротора посредством фазовой автоподстройки частоты ФАПЧ (29), также выполняют преобразование систем координат (преобразование Парка-Кларка) (30), формируют сигналы управления (31) инверторным модулем 14 управляемого источника питания 1 для формирования сигналов широтно-импульсной модуляции ШИМ.
В ходе настройки (32) системы управления определяют (33) параметры схемы замещения электродвигателя и выполняют регулирование параметров системы, в частности управляют частотой перехода в режим векторного управления 27 регулируя значения токов статора электродвигателя, задают параметры линии связи (34).
В блок (33) определения параметров схемы замещения электродвигателя, определяют, по меньше мере, параметры индуктивностей по осям ротора и момент инерции ротора электродвигателя исходя из которых формируют сигналы управления 31 для управляемого источника напряжения, посредством чего реализуют регулирование активного и реактивного тока, а также скорости электродвигателя (см. фиг.5). Предварительная настройка (32) позволяет задать основные параметры системы управляемого электродвигателя и повысить точность управления.
В ходе формирования сигналов напряжения (31) ориентированного по положению ротора электродвигателя учитывают параметры (34) промежуточных элементов включенных в линию связи электродвигателя с управляемым источником питания. При этом в блоке (34) определяют индуктивность, сопротивление и емкость включенных в линию связи элементов, среди которых, трансформатор, синусный фильтр, а также кабельная линия. При формировании сигналов управления значения емкости могут не учитываться.
Указанные параметры линии связи приводят к значениям, на обмотке трансформатора по стороне электродвигателя определяемым в блоке (27) или задаваемые пользователем вручную, после чего суммируют (34) и относят к эквивалентным параметрам статора электродвигателя. В таком варианте система максимально точно учитывает влияние от элементов встроенных в линию связи.
Также с целью повышения точности и быстродействия системы управления выполняют выравнивание по фазам (26) сигнала с информацией о напряжении звена постоянного тока ЧРП, с учетом задержки, по меньшей мере, на один такт ШИМ.
При этом используя средство управления (СУ), изменяют, контролируют и отображают (35) набор параметров управляемого электродвигателя и линии связи в режиме реального времени работы электродвигателя.
Указанный набор параметров включает, по меньшей мере параметры активного, реактивного тока и скорости двигателя, параметры индуктивности по осям, потокосцепление ротора, момент вращения электродвигателя при переходе в режим векторного управления на заданной частоте (см. фиг. 4-10).
Средство управления выполняют в виде аппаратно-программного комплекса включающего центральный процессор, на базе которого формируют блоки сбора, корректировки, обработки и визуализации рабочих параметров управляемого электродвигателя в режиме реального времени работы электродвигателя с постоянными магнитами.
Так как, по существу, любое удаленное СУ также как и встроенный ПМК могут выполнять одни и те же функции, то структура ЦП отображенная на (фиг.2) и последовательность действий реализации способа (фиг.3) могут быть реализованы в полной мере независимо от вида применимого средства управления.
При этом в центральном процессоре реализуют блоки определения, регулирования параметров активного и реактивного тока, скорости, частоты, индуктивности по осям, момента пуска электродвигателя, а также блок построения интерактивных графиков с изменяемой пользователем частотой обновления информации, формируемые графики выводят на дисплей удаленного средства управления в режиме реального времени.
Вариант реализации системы векторного управления и настройки параметров приведен на фиг.4-9 с отображением директорий настройки параметров системы отображаемых через интерфейс СУ.
На фиг.4 приведен вариант директории выбора ЧРП и портов подключения к средству управления, также в данной директории приведены данные о состоянии системы “Готов”, “Работа”, “Авария” и др.
На фиг. 5 приведен вариант директории с основными параметрами системы регулирования. Отображаемые параметры могут задаваться пользователем при настройке системы во вкладках директории (фиг.6).
На фиг.7; 8 приведен вариант графического отображения работы системы в режиме реального времени, где отображено состояние регулирования скорости до момента включения векторного управления (36), также показан момент перехода к векторному управлению (38) с учетом автоматического и ручного управления частотой перехода и моментом электродвигателя, а также состояние системы в режиме векторного управления (37).
Заявленный алгоритм позволяет сгладить переходной процесс 38 за счет регулирования тока статора оказывая влияние на компоненты тока в системе координат ротора, приводя его к заданным зачтениям.
Также в графическом виде отображено значение реактивного тока (39) которое находится на уровне заданного значения “0”, что говорит о высокой эффективности системы и точности векторного управления двигателем с постоянными магнитами.
Состояние регулирования по скорости отображено в директории (фиг.9). Отработка задания показана в области (40). Также в режиме реального времени отображены скачки и стабилизация регулятора скорости при смене задания на регулирование по скорости. Интерактивные график позволяют фиксировать время отработки задания и масштабировать график, ускорять работу регуляторов изменяя частоту среза фильтров.
Реализация заявленного изобретения позволяет решить поставленную техническую задачу обеспечивая высокую точность работы векторного управления, повышение энергоэффективности путем поддержания значения реактивного на уровне “0” согласно заданию (фиг.7, 8). Поддержание частоты и скорости (фиг.9) электродвигателя согласно заданию.
Изобретение относится к области электротехники и может использоваться для минимизации потерь электроэнергии, бездатчикового регулирования вентильных электродвигателей с постоянными магнитами, в том числе для электронасосов нефтяных скважин, а также электродвигателей, применяемых в промышленности и городском хозяйстве. Технический результат заключается в минимизации потерь электроэнергии при реализации векторного управления двигателем с постоянными магнитами, вызванной повышением точности регулирования и расширением номенклатуры управляемых электродвигателей. При переходе в режим векторного управления задают частоту перехода. В ходе формирования сигналов напряжения, ориентированного по положению ротора электродвигателя, учитывают параметры промежуточных элементов, включенных в линию связи электродвигателя с управляемым источником питания. Определяют индуктивность, сопротивление и емкость включенных в линию связи элементов, в частности трансформатора, синусного фильтра, а также кабельной линии. Указанные параметры приводят к значениям, на одной из сторон трансформатора, после чего суммируют и относят к эквивалентным параметрам статора электродвигателя. Используя удаленное средство управления, изменяют, контролируют и отображают набор параметров управляемого электродвигателя и линии связи в режиме реального времени работы электродвигателя. Указанный набор параметров включает, по меньшей мере, параметры активного, реактивного тока и скорости двигателя, параметры индуктивности по осям, потокосцепление ротора, момент вращения электродвигателя при переходе в режим векторного управления на заданной частоте. 2 н. и 3 з.п. ф-лы, 9 ил.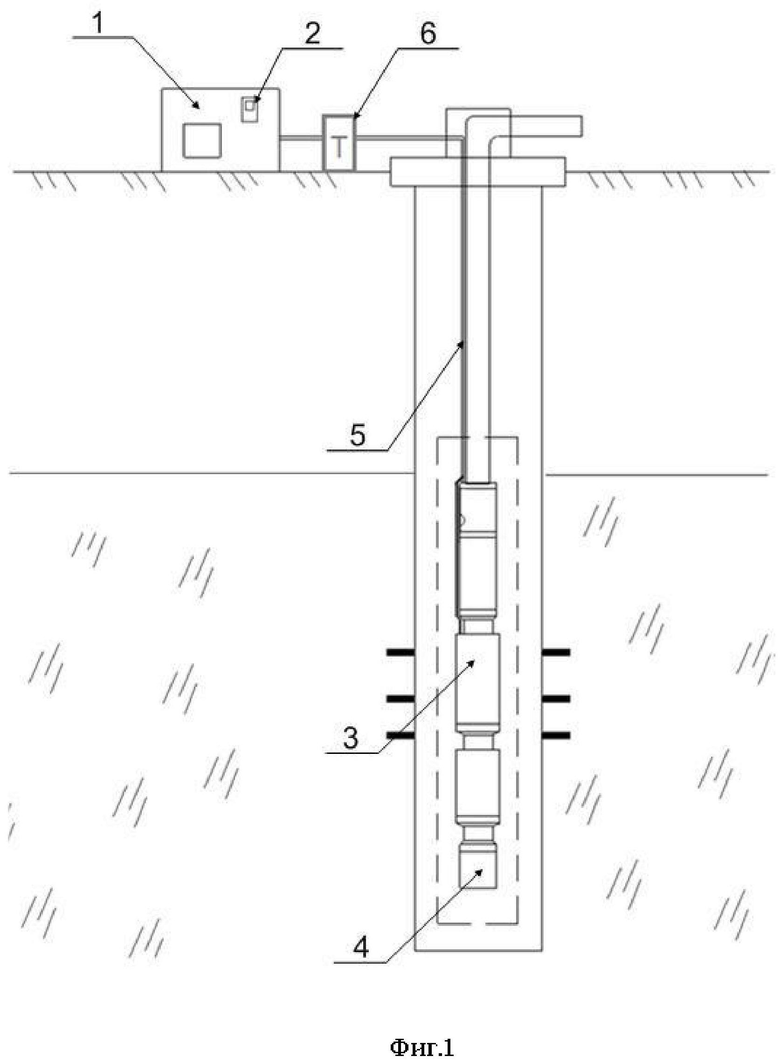
1. Система векторного управления электродвигателем с постоянными магнитами, которая содержит управляемый источник напряжения с автоматизированной системой управления на базе средства управления (СУ), связанного с элементами системы измерения параметров электродвигателя и линии связи, причем указанное средство управления содержит, по меньшей мере, блоки определения угла и частоты ротора, блок корректировки оценочного угла ротора, включающего модуль фазовой автоподстройки частоты (ФАПЧ), блоки преобразования координат, а именно преобразователи Парка-Кларка, блок формирования сигналов управления инверторным модулем управляемого источника напряжения для формирования сигналов широтно-импульсной модуляции (ШИМ), а также блоки определения параметров схемы замещения электродвигателя, отличающаяся тем, что на базе средства управления (СУ) сконфигурированы блоки учета параметров индуктивности, сопротивления и емкости промежуточных элементов линии связи, включающей, по меньшей мере, контактный кабель, трансформатор и синусный фильтр, при этом средство управления (СУ) сконфигурировано с возможностью изменения, контроля и отображения набора параметров управляемого электродвигателя и линии связи в режиме реального времени, указанный набор параметров включает, по меньшей мере, параметры активного, реактивного тока и скорости двигателя, параметры тока по осям ротора, потокосцепление ротора, момент вращения двигателя при включении векторного управления.
2. Система векторного управления электродвигателем с постоянными магнитами по п.1, отличающаяся тем, что средство управления (СУ) выполнено в виде аппаратно-программного комплекса, включающего центральный процессор с блоками сбора, корректировки, обработки и визуализации рабочих параметров управляемого электродвигателя в режиме реального времени, при этом в центральном процессоре СУ реализованы блоки регулирования параметров активного и реактивного тока, скорости, частоты, индуктивности по осям, момента пуска электродвигателя, а также блок построения интерактивных графиков с изменяемой пользователем частотой обновления информации, с последующим выводом на дисплей средства управления.
3. Способ векторного управления электродвигателем с постоянными магнитами, реализованный на базе управляемого источника напряжения с автоматизированной системой управления, включающей средство управления (СУ) с элементами системы измерения параметров электродвигателя и линии связи, согласно которому формируют сигналы управления электродвигателем, в ходе чего определяют параметры угла и частоты ротора, выполняют корректировку оценочного угла ротора, также выполняют преобразование систем координат, а именно преобразование Парка-Кларка, формируют сигналы управления ШИМ, также в ходе настройки системы управления определяют параметры схемы замещения электродвигателя, отличающийся тем, что в ходе формирования сигналов напряжения ориентированного по положению ротора электродвигателя учитывают параметры промежуточных элементов, включенных в линию связи электродвигателя с управляемым источником напряжения, при этом определяют, по меньшей мере, индуктивность и сопротивление включенных в линию связи элементов, указанные параметры приводят к значениям, на обмотке трансформатора по стороне электродвигателя, и относят к эквивалентным параметрам статора электродвигателя, также выполняют выравнивание по фазе сигнала с информацией о напряжении в звене постоянного тока управляемого источника напряжения, с учетом задержки, по меньшей мере, на один такт ШИМ, при этом исходя из параметров тока в системе координат ротора определяют пусковой момент электродвигателя и осуществляют управление частотой перехода от скалярного управления к векторному.
4. Способ векторного управления электродвигателем с постоянными магнитами по п.3, отличающийся тем, что в режиме реального времени работы электродвигателя контролируют, по меньшей мере, параметры индуктивности по осям, потокосцепление ротора, момент вращения электродвигателя при переходе в режим векторного управления на заданной частоте.
5. Способ векторного управления электродвигателем с постоянными магнитами по п.3, отличающийся тем, что средство управления выполняют в виде аппаратно-программного комплекса, включающего центральный процессор, на базе которого формируют блоки сбора, корректировки, обработки и визуализации рабочих параметров управляемого электродвигателя в режиме реального времени работы электродвигателя, при этом в центральном процессоре реализуют блоки регулирования параметров активного и реактивного тока, скорости, частоты, индуктивности, момента пуска электродвигателя, а также блок построения интерактивных графиков с изменяемой пользователем частотой обновления информации, формируемые графики выводят на дисплей удаленного средства управления в режиме реального времени.
| RU 2132110 C1, 20.06.1999 | |||
| US 7299708 B2, 27.11.2007 | |||
| CN 103780191 A, 07.05.2014 | |||
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| CN 104852658 A, 19.08.2015. | |||

