Техническое решение относится к области авиации, в частности к конструкциям винтокрылов.
Известен беспилотный летательный аппарат типа квадплейн, представляющий собой самолет, на который установлены четыре воздушных винта с вертикальной тягой, обеспечивающие только вертикальный полет Патент US №9120560 МПК В64С 29/0008
Основным недостатком квадплейновой схемы является неустойчивость при боковом ветре на малых скоростях ввиду высокой парусности крыла и малой тяговооруженности винтомоторной группы для вертикального полета, у которой не хватает мощности парировать изменение воздушной среды при боковом ветре.
Известно техническое решение, конвертоплан содержащий фюзеляж, крылья и размещенные с возможностью поворота на конце каждого из крыльев двигательные группы в виде мотогондол, каждая из которых содержит тянущий и толкающий винты. Толкающие винты выполнены с возможностью перевода в положение наименьшего сопротивления воздушному потоку при переходе конвертоплана в режим горизонтального полета и отключении двигателя толкающего винта. Патент RU 182 884; МПК В64С 37/00; Опубликовано: 05.09.2018.
Недостатками данной схемы является наличие переходного режима при переходе от вертикального полета к горизонтальному и обратно, при котором сложно обеспечивать устойчивость аппарата. Кроме этого поворотный механизм снижает надежность эксплуатации и увеличивает сложность и стоимость аппарата.
Известно техническое решение, беспилотный летательный аппарат, содержащий фюзеляж, выполненный в форме обтекаемой гондолы с крыльями, выполненными по аэродинамической схеме "тандем", несущими подъемные винтомоторные группы, содержащие электромоторы и винты с наружными лопастями, стабилизатор, маршевую винтомоторную группу.
Патент RU 2716391 С2; Российский патент 2020 года по МПК В64С 27/22 В64С 27/08 В64С 39/02.
Недостатками данной схемы являются наличие органов самолетного аэродинамического управления, включающими элероны и рули высоты, снижающие надежность эксплуатации, и увеличивающие массу аппарата, стоимость и сложность сборки. Также совмещение несущих винтов и самолетных органов управления требует продвинутой и дорогой системы автоматического управления. Также недостатком данной схемы является наличие переходного режима при переходе от вертикального полета к горизонтальному и обратно, при котором сложно обеспечивать устойчивость аппарата.
Прототипом изобретения является беспилотный винтокрылый летательный аппарат типа тандем, содержащий фюзеляж, включающий хвостовую балку, выполненную поворотной, переднее и заднее крылья, закрепленные на фюзеляже, воздушные винты, установленные в трикоптерной конфигурации, при этом два воздушных винта закреплены на концах переднего крыла, один воздушный винт закреплен на хвостовой балке. Патент на изобретение RU №2720746; МПК В64С 27/22; Опубликовано 13.05.2020.
Недостатком данной схемы является наличие поворотной хвостовой механики, снижающей срок службы, надежность эксплуатации и увеличивающей сложность и стоимость аппарата.
В отличие от прототипа, изобретение имеет большую устойчивость к воздушным возмущениям и большую энергоэффективность, а также большую простоту, низкую стоимость аппарата и надежность эксплуатации.
Большая устойчивость и энергоэффективность достигается за счет увеличения числа двигателей до четырех, относительно трикоптерной схемы, при этом квадрокоптерная схема не увеличивает габаритов летательного аппарата, в отличие от других мультироторных схем.
Простоту и низкую стоимость сборки обеспечивает отсутствие поворотной механики, которая имеет высокие требования к качеству изготовления и трудоемкую сборку и настройку. Вместо подвижной хвостовой балки имеется неподвижная поперечная задняя балка, на которой установлено два воздушных винта с электродвигателями с продольными и поперечными углами заклинения. Наличие неподвижной балки, взамен поворотной также обеспечивает большую надежность эксплуатации.
Благодаря тому, что задняя поперечная балка с винтами находится за задними крыльями, на задние крылья не попадает спутный поток от задних винтов, что повышает эффективность как крыла, так и воздушного винта.
Описание работы системы
Отличительными признаками заявляемого решения являются тандемная схема расположения переднего и заднего крыльев, при отрицательном значении выноса крыла и квадрокоптерная схема расположения воздушных винтов.
Технический результат заявляемого технического решения проявляется в улучшении аэродинамических свойств аппарата за счет схемы тандемных крыльев, в которой, благодаря размещению переднего крыла ниже уровня заднего, уменьшается взаимное влияние крыльев друг на друга, что обеспечивает увеличение подъемной силы аппарата.
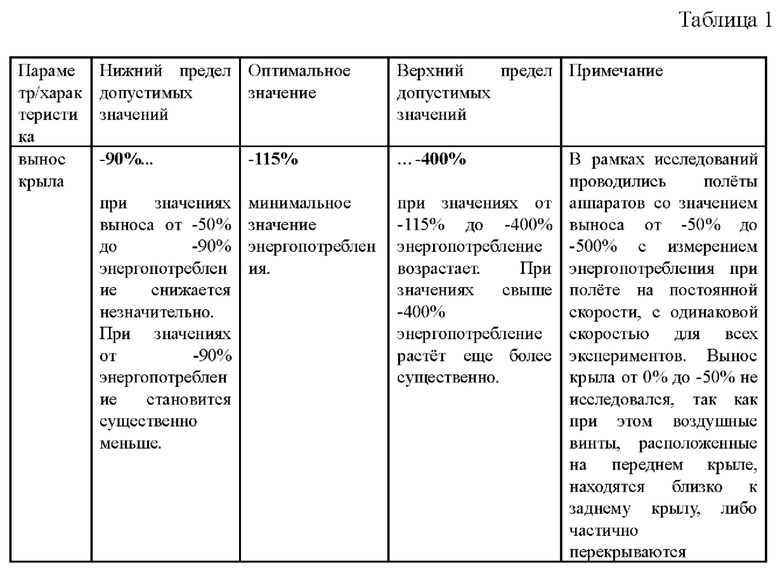
Технический результат достигается тем, что в винтокрылом летательном аппарате, содержащем фюзеляж, переднее и заднее крылья, закрепленные на фюзеляже, заднюю балку, воздушные винты, каждый из которых включает двигатель и лопасти, установленные в квадрокоптерной конфигурации, при этом два воздушных винта закреплены на концах переднего крыла, два воздушных винта расположены на поперечной задней балке, переднее и заднее крылья выполнены по тандемной схеме, при этом значение выноса крыла является отрицательным. Вынос крыла может быть равен от -90% до -400% от средней аэродинамической хорды. Угол установки переднего и заднего крыльев может быть равен от 2° до 10°. Продольные углы заклинения двигателей, вперед по полету, переднего крыла и поперечной балки могут быть равны от 100 до 450. Поперечные углы заклинения двигателей, вокруг продольной оси правые направо, левые налево, переднего крыла и поперечной балки могут быть равны от 5° до 50°.
В целях описания заявляемого технического решения использованы следующее определения.
Тандемная схема крыльев - схема, при которой два крыла, предназначенных для создания подъемной силы, расположены одно за другим и разнесены по высоте фюзеляжа.
Квадрокоптерная конфигурация - конфигурация летательного аппарата, который выполняет полет и маневрирование в воздухе с помощью четырех несущих винтов, каждый из которых приводится в движение отдельным двигателем.
Несущий винт - воздушный винт с вертикальной осью вращения, либо с осью вращения, приближенной к вертикали (с отклонением на угол, не превышающий 50°), обеспечивающий подъемную силу винтокрылому летательному аппарату, позволяющий выполнять управляемый горизонтальный и вертикальный полет и совершать вертикальный взлет и посадку.
Вынос крыла - размещение одного крыла перед другим. Вынос крыла считается положительным, когда верхнее крыло находится впереди, и отрицательным, когда вперед выступает нижнее крыло. Вынос крыла измеряется в процентах САХ (средняя аэродинамическая хорда), выступающего вперед крыла.
Средняя аэродинамическая хорда крыла (САХ) - хорда такого прямоугольного крыла, которое имеет одинаковые с данным крылом площадь, величину полной аэродинамической силы и положение центра давления (ЦД) при равных углах атаки.
Центральная хорда крыла - хорда крыла в базовой плоскости летательного аппарата.
Базовая плоскость аппарата - плоскость базовой системы координат летательного аппарата, относительно которой большинство элементов летательного аппарата расположено симметрично слева и справа.
Угол установки крыла - угол между центральной хордой крыла и базовой осью летательного аппарата.
Спутный поток - завихренный турбулизованный поток, образующийся за крылом при обтекании крыла. При создании положительной подъемной силы направлен назад и вниз относительно летательного аппарата.
Винтокрылые летательные аппараты, являясь гибридами коптеров и самолетов, сочетают в себе преимущества и тех, и других. Имеют возможность вертикально взлетать, зависать над объектом, маневренны в полете, как коптеры, при этом имеют большую дальность, ближе к самолетной, по сравнению с коптерами.
Переднее и заднее крылья, расположенные по тандемной схеме, способствуют достижению оптимальных аэродинамических параметров, позволяют получить большую площадь несущей поверхности при сохранении компактности аппарата. Преимуществом тандемных крыльев по сравнению с не тандемными крыльями (обычным бипланом) является сниженное взаимное влияние крыльев друг на друга (снижение негативного перераспределения давления воздушного потока и влияния спутного потока с переднего крыла на заднее, которое снижает подъемную силу задних крыльев). В результате, подъемная сила, действующая на аппарат существенно выше, а аэродинамическое сопротивление существенно ниже, по сравнению с бипланом.
Благодаря ненулевому поперечному углу заклинения двигателей, аппарат может выполнять повороты и маневрирование в полете по дуге с малым радиусным расстоянием за счет наличия поперечной горизонтальной составляющей тяги при маневрировании квадрокоптерным методом при отсутствии механизмов и поворотных элементов, предназначенных для маневрирования.
При отрицательном выносе крыла, то есть когда переднее крыло размещено ниже уровня заднего, обеспечивается существенное уменьшение взаимного влияния крыльев друг на друга, минимизация интерференции набегающего на заднее крыло потока и спутного потока переднего крыла. Экспериментально установлено, что оптимальные и допустимые значения этого показателя находятся в диапазоне от -90% до -400%. В модели конструкции с выносом крыла, равном ниже предела -90% возникла интерференция, которая привела к ухудшению аэродинамических качеств аппарата, при этом вынос крыла выше предела -400% привел к необоснованному превышению длины фюзеляжа перед размахом крыла, и как следствие, к утяжелению аппарата и к ухудшению его аэродинамических характеристик. При выносе крыла в -115% летательный аппарат показал стабильный полет на летных испытаниях.
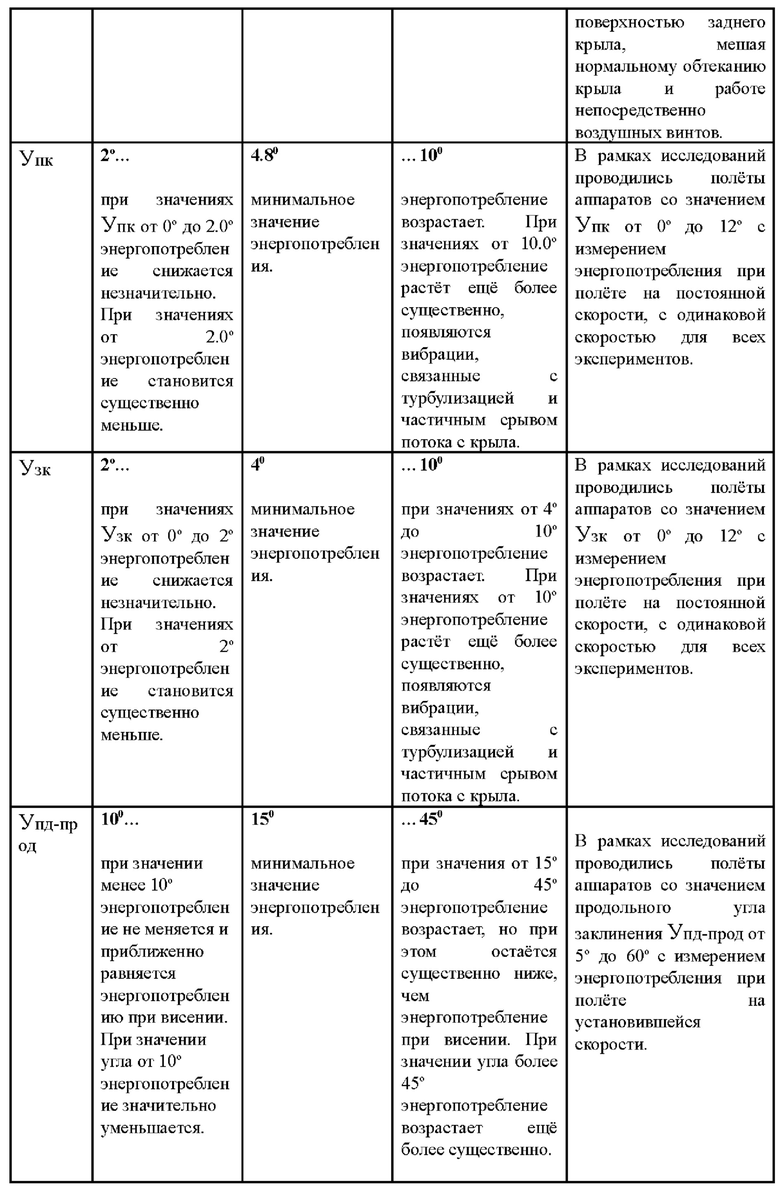
Угол установки переднего и заднего крыла, равный от 2° до 10°, обеспечивает достижение максимального аэродинамического качества переднего и заднего крыла, соответственно, на скоростях, близких к крейсерской. Экспериментально установлено, что угол установки любого из крыльев менее 2° приведет к недостатку подъемной силы аппарата, при этом увеличение этого угла до более чем 10° станет причиной большого лобового сопротивления летательного аппарата и срыва потока с крыла.
Важным в конструкции аппарата является продольный угол заклинения передних и задних двигателей. Нахождение его показателя в пределах от 10° до 45°, позволяет достичь оптимальной горизонтальной тяги без необходимости усложнения конструкции с добавлением поворотных механизмов для воздушных винтов. Экспериментально установлено, что угол заклинения воздушного винта менее 10° приводит к недостаточной горизонтальной тяге аппарата, а более 45° приводит к ухудшению эффективности воздушного винта, связанном с увеличением влияния набегающего потока.
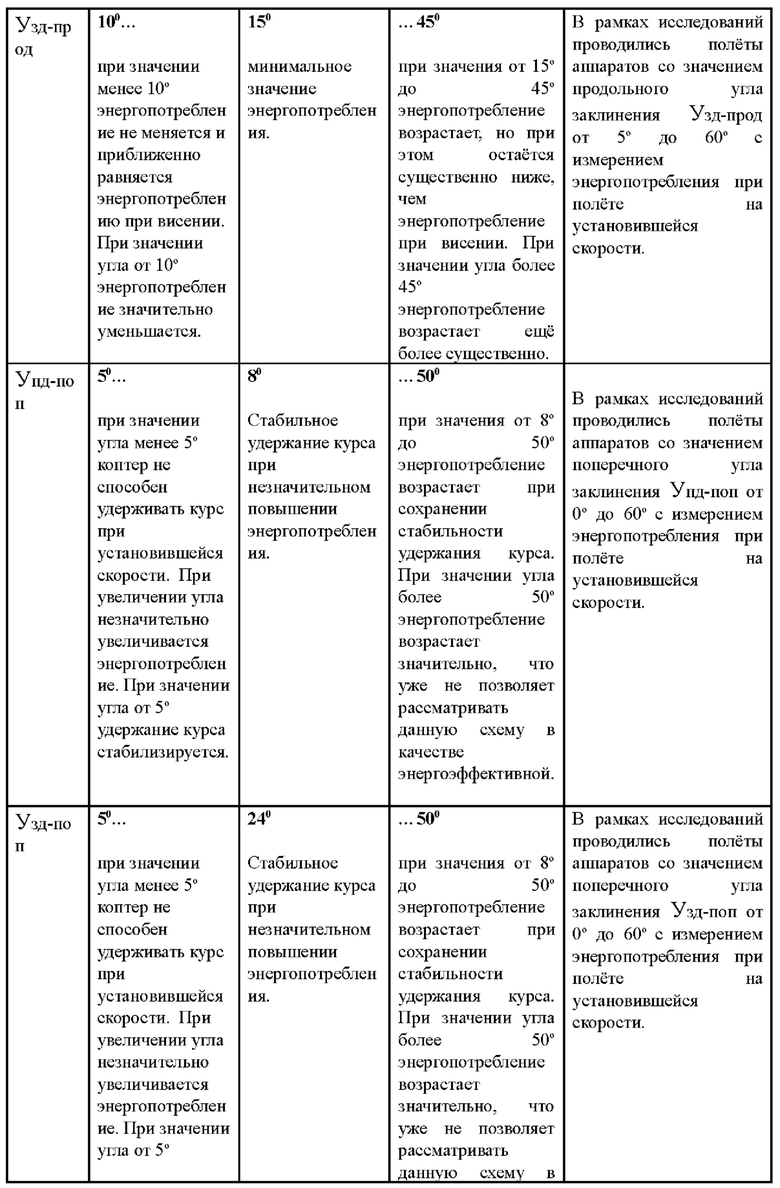
Важным в конструкции аппарата является поперечный угол заклинения передних и задних двигателей. Нахождение его показателя в пределах от 5° до 50°, позволяет достичь оптимальной горизонтальной поперечной составляющей тяги без необходимости усложнения конструкции с добавлением поворотных механизмов для воздушных винтов. Экспериментально установлено, что угол заклинения воздушного винта менее 5° приводит к недостаточной для маневрирования и удержания курса горизонтальной поперечной составляющей тяги аппарата, а более 50° приводит к ухудшению характеристик энергопотребления за счет увеличения общей тяги двигателя.
Квадрокоптерная схема винтов в сочетании с тандемным расположением крыльев с продольными и поперечными углами заклинения передних и задних двигателей позволяет выполнять с одной стороны, вертикальный взлет и посадку аппарата, зависание на месте и маневрирование, а с другой стороны горизонтальный полет на крыльях, создавая продольную горизонтальную проекцию вектора тяги за счет наклона оси воздушных винтов вперед, что не требует наличия дополнительных горизонтальных толкающих либо тянущих воздушных винтов, а также механического поворота винтов, крыльев или гондол, автомата перекоса или винтов с изменяемым шагом.
Заявляемое техническое решение далее поясняется с помощью фигур, на которых условно представлен один из возможных вариантов исполнения винтокрылого летательного аппарата.
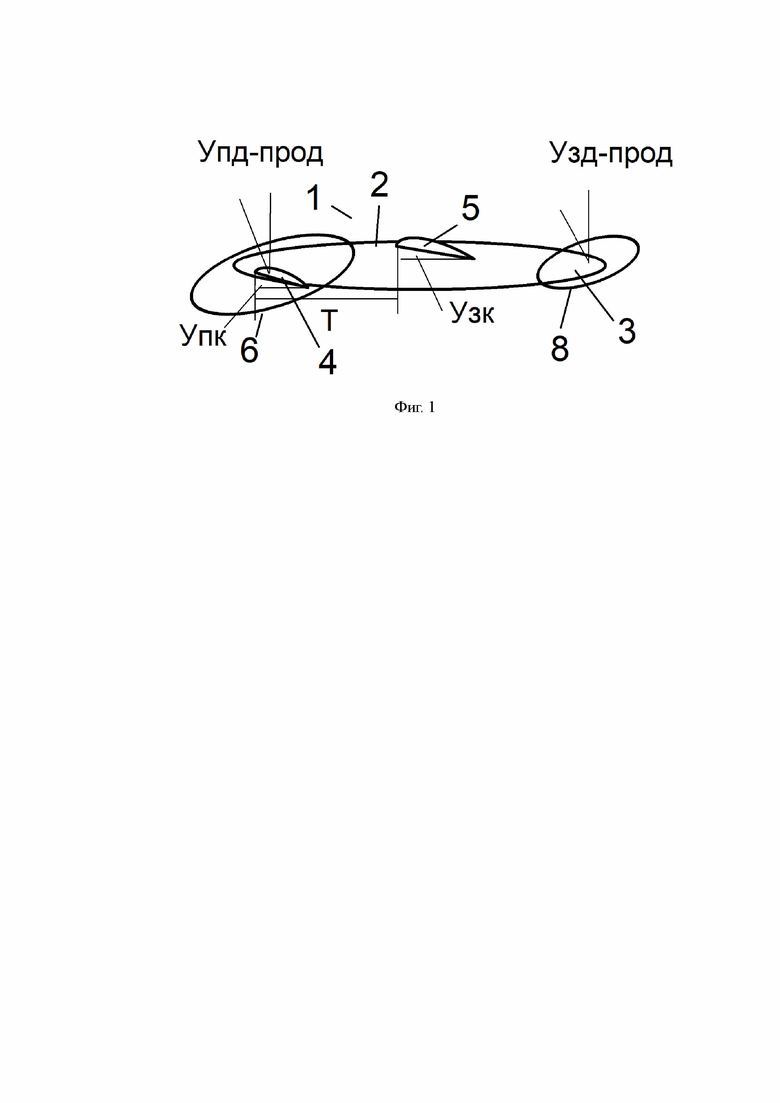
На фиг. 1 представлен боковой вид винтокрылого летательного аппарата.
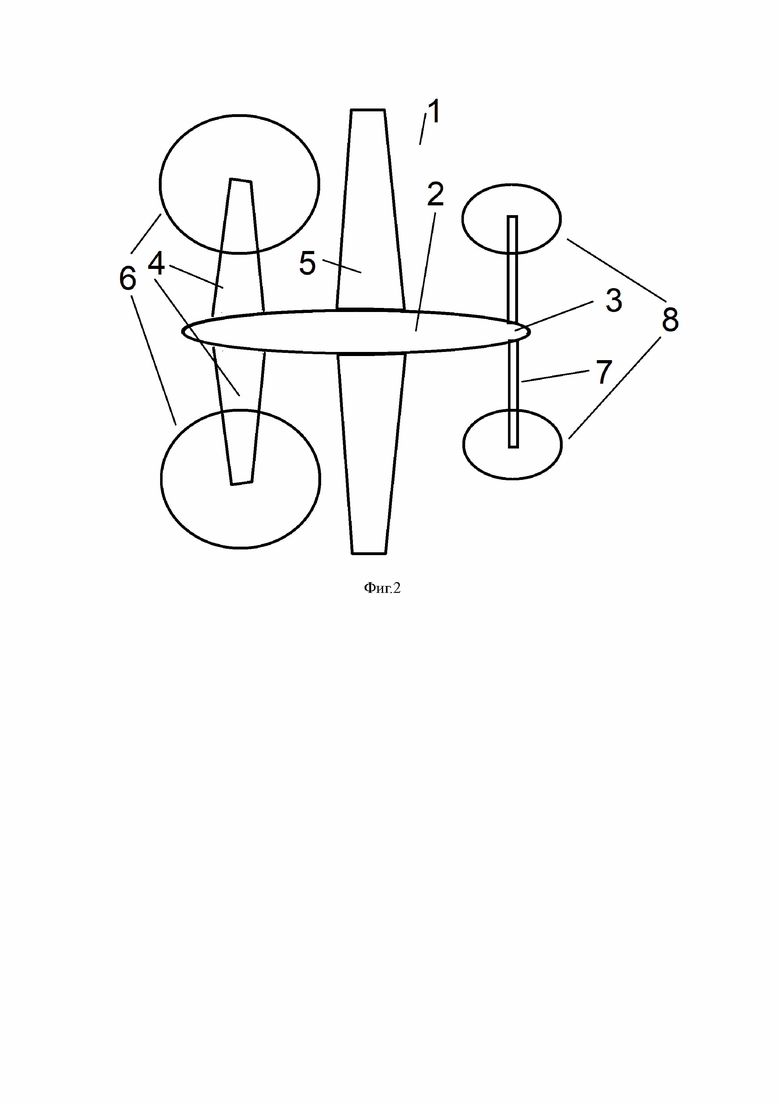
На фиг. 2 представлен вид винтокрылого летательного аппарата сверху.
На фиг. 3 представлен передний вид винтокрылого летательного аппарата.
На фиг. 1-3 изображен винтокрылый летательный аппарат (1) содержащий фюзеляж (2), хвостовую балку (3), переднее (4) и заднее (5) крылья, закрепленные на фюзеляже (2). На концах переднего крыла (4) установлены два воздушных винта (6). На хвостовой балке (3) установлена поперечная задняя балка (7). На концах поперечной задней балки (7) установлены два воздушных винта (8).
На фигурах отмечены характеристики винтокрылого летательного аппарата (1):
- вынос крыла - Т;
- угол установки переднего крыла (4) - Упк;
- угол установки заднего крыла (5) - Узк;
- продольный угол заклинения передних двигателей (6) - Упд-прод;
- продольный угол заклинения задних двигателей (8) - Узд-прод;
- поперечный угол заклинения передних двигателей (6) - Упд-поп;
- поперечный угол заклинения задних двигателей (8) - Узд-поп.
Крылья (4) и (5) аппарата (1) выполнены по тандемной схеме, при этом переднее крыло (4) расположено ниже заднего крыла (5), то есть вынос крыла отрицателен и равен от -90% до -400%. Предпочтительной является конструкция с выносом крыла, равным -109%.
Угол Упк установки переднего крыла (4) заявляемого аппарата (1) равен от 2 до 10°. Такой же диапазон имеет угол Узк установки заднего крыла (5). В преимущественном варианте, угол Упк установки переднего крыла (4) равен 4.8°, угол Узк установки заднего крыла (5) равен 4°.
Продольные углы заклинения Упд-прод, Узд-прод осей воздушных винтов (6), (8) относительно вертикали равны от 10° до 45°. Оптимальна конструкция аппарата с продольными углами Упд-прод, Узд-прод заклинения осей воздушных винтов (6), (8) относительно вертикали, равными 15°.
Поперечные углы заклинения Упд-поп, Узд-поп осей воздушных винтов (6), (8) относительно вертикали равны от 5° до 50°. Оптимальна конструкция аппарата с поперечными углами Упд-поп заклинения осей передних воздушных винтов (6) равными 8°, поперечными углами Узд-поп заклинения осей задних воздушных винтов (8) равными 24°.
Винтокрылый летательный аппарат (1) может также включать шасси и средства крепления полезной нагрузки, такой как камера, тепловизор и т.д.
Все заявляемые параметры и характеристики аппарата (1) были установлены экспериментальным и теоретическим методами. Допустимые пределы выбраны исходя из условия достижений наилучших аэродинамических характеристик при сохранении общих конструктивных особенностей (квадрокоптерная конфигурация воздушных винтов (6), (8) в совокупности с тандемной схемой крыльев (4) и (5)). Установленные необходимые данные занесены в Таблицу 1.

Один из предпочтительных вариантов использования заявленного винтокрылого летательного аппарата (1) продемонстрирован далее на примере. Аппарат (1) может использоваться в промышленности для аэрофото- и видеосъемки, тепловизионной съемки с воздуха в качестве беспилотного летательного аппарата. С его помощью можно проводить мониторинг территорий и рабочих процессов, диагностировать состояние объектов инфраструктуры и промышленности: зданий и сооружений, трубопроводов, ЛЭП, дорог, техники и т.д.
Благодаря вертикальному взлету и посадке аппарату (1) не требуются специальная площадка или устройство для взлета, достаточно площадки 2 кв. м. Возможность зависать над точкой помогает рассмотреть объект более детально. Маневренность позволяет летать в ограниченном пространстве и не тратить заряд на дополнительные расстояния в разворотах. Дальность полета аппарата позволяет совершать облеты больших территорий и протяженных объектов. Компактность аппарата позволяет залетать в небольшие автоматические зарядные станции для автоматической зарядки или роботизированной замены аккумуляторов.
В горизонтальном полете аппарат (1) наклоняется вперед, чтобы угол между плоскостью вращения воздушных винтов (6), (8) и вектором скорости становился больше. Так воздушные винты (6), (8) создают горизонтальную проекцию тяги и аппарат (1) летит горизонтально.
При этом сопротивление набегающих потоков на заднее крыло (5) минимизировано за счет его расположения, выше уровня переднего крыла (4).
Аппарат выполняет маневрирование по курсу при изменении тяги противоположных винтов попарно. Из-за наличия поперечного угла заклинения создается дополнительный момент сил, увеличивающий возможности управления по курсу. Управление по тангажу и крену осуществляется за счет при изменении тяги смежных винтов попарно.
Представленные фигуры, описание конструкции и использования винтокрылого летательного аппарата не исчерпывают возможные варианты исполнения и не ограничивают каким-либо образом объем заявляемого технического решения. Возможны иные варианты исполнения и использования в объеме заявляемой формулы. В зависимости от назначения, винтокрылый летательный аппарат (1) может быть изготовлен разных размеров, цветов и конфигураций.
Винтокрылый летательный аппарат имеет по параметрам минимальную шумность, минимальные электромагнитные наводки, относительную простоту расположения высокочастотного радиоэлектронного оборудования за счет заднего крыла, не имеющего силовых токоведущих элементов. Так же упрощается оптимизация под различные схемы работы аэродинамических плоскостей и повышается доступность вариаций конструктивно-силовых схем агрегатов. Заявляемая квадрокоптерная аэродинамическая схема винтокрылого летательного аппарата с тандемными крыльями является оптимальной для использования в проекте беспилотного винтокрыла тандемной схемы при горизонтальном, вертикальном и переходном режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |
| БЕСПИЛОТНЫЙ ПАЛУБНЫЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2661277C1 |
| ПРЕОБРАЗУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ) | 2014 |
|
RU2550589C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С КРЫЛОМ-СТАБИЛИЗАТОРОМ | 2020 |
|
RU2743306C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ И НЕСУЩАЯ ПЛАТФОРМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ | 2018 |
|
RU2693362C1 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |

Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Винтокрылый летательный аппарат содержит фюзеляж, переднее крыло с установленными на его концах воздушными винтами, которые наклонены вперед по полету, заднее крыло. За задним крылом установлена поперечная балка с установленными на ее концах воздушными винтами. При этом оси вращения винтов переднего крыла и винтов, установленных на поперечной балке, имеют угол заклинения оси вращения вперед по полету от 10 до 45° и угол заклинения вокруг продольной оси правые направо, левые налево от 5 до 50° от вертикали, и заднее крыло размещено на фюзеляже со смещением по высоте вверх и назад относительно переднего крыла, а угол установки крыльев равен от 2 до 10°. Обеспечивается повышение устойчивости к воздушным возмущениям, энергоэффективности, надежности в эксплуатации. 3 ил., 1 табл.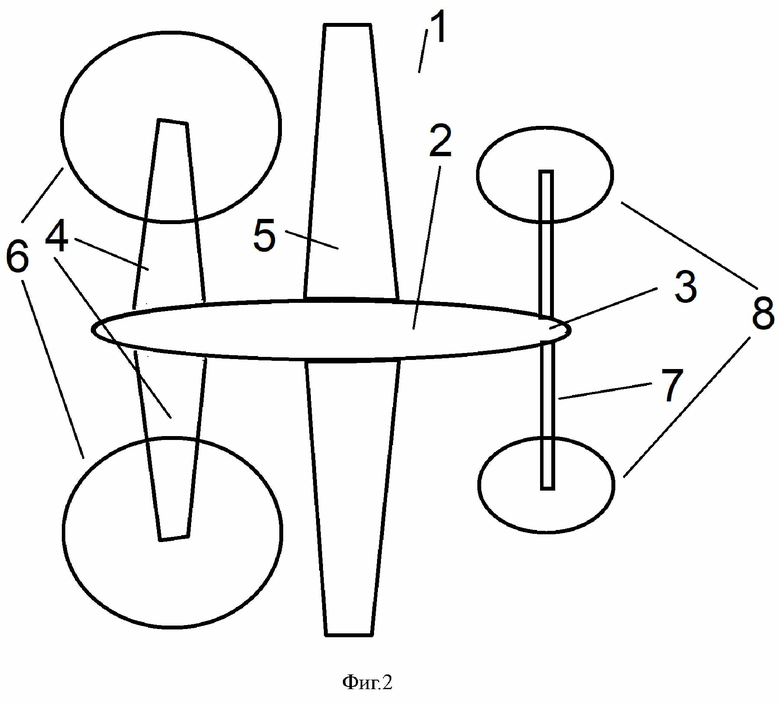
Винтокрылый летательный аппарат, содержащий фюзеляж, переднее крыло с установленными на его концах воздушными винтами, которые наклонены вперед по полету, заднее крыло, отличающийся тем, что за задним крылом установлена поперечная балка с установленными на её концах воздушными винтами, при этом оси вращения винтов переднего крыла и винтов, установленных на поперечной балке, имеют угол заклинения оси вращения вперед по полету от 10 до 45° и угол заклинения вокруг продольной оси правые направо, левые налево от 5 до 50° от вертикали, и заднее крыло размещено на фюзеляже со смещением по высоте вверх и назад относительно переднего крыла, а угол установки крыльев равен от 2 до 10°.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И СПОСОБ УПРАВЛЕНИЯ ЕГО ПОЛЕТОМ | 2016 |
|
RU2638221C2 |
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |
| ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2670356C2 |
| CN 207078311 U, 09.03.2018 | |||
| US 20150344134 A1, 03.12.2015. | |||

