Изобретение относится к области авиационной техники и касается создания скоростных преобразуемых винтокрылов с системой разнесенной тяги разновеликих винтов в несущей схеме Х2+2, два больших из которой смонтированы на вертикальных опорах, установленных между корпусов обтекателей высокорасположенного биплана как нижнего второго крыла обратной стреловидности, так и верхнего первого стреловидного крыла типа парасоль обратная "чайка", и с изменяемым вектором тяги два меньших из нее на цельно-поворотных консолях V-образного стабилизатора, обеспечивающих маршевую тягу и выполнение вертикального и короткого взлета/посадки (ВВП и КВП), но и короткого взлета и вертикальной посадки (КВВП).
Известен тяжелый винтокрыл модели «Ротодайн» фирмы «Вестланд» (Англия), содержащий моноплан с высокорасположенным крылом и на пилоне над фюзеляжем один несущий винт с реактивными соплами на концах его четырех лопастей, силовую установку, включающую два турбовинтовых двигателя, расположенных в гондолах на консолях под крылом, обеспечивающих подачу сжатого воздуха для реактивного привода несущего винта и приводящих во вращение тянущие воздушные винты, хвостовое оперение с горизонтальным стабилизатором и двухкилевым оперением, имеющим складывающиеся верхние части при вертикальном взлете и посадке, и трехопорное убирающееся колесное шасси с носовой вспомогательной опорой.
Признаки совпадающие - наличие на пилоне над фюзеляжем несущего винта большого диаметром 31,8 м, создающего вертикальную тягу только при вертикальном взлете и посадке, а два турбовинтовых двигателя мощностью по 5250 л.с., используемых располагаемую их мощность при взлете для работы компрессора, который засасывал воздух, сжимал его до четырех атмосфер и подавал через систему трубопроводов к соплам на концах четырех лопастей несущего винта и приводящих тянущие винты, расположенные на крыле, обеспечивающие горизонтальную тягу только при крейсерском полете, особенно, когда несущий винт станет вращаться на режиме самовращения, как у автожира, создавая только 40% необходимой подъемной силы, а 60% будут создаваться крылом, что должно было обеспечить винтокрылу более высокую экономичность, чем у вертолета, а избыточная тяговооруженность его силовой установки, обеспечивающая продолжение полета и на одном работающем двигателе, создает диапазон скоростей его полета 325…340 км/час и при взлетном весе винтокрыла 24276 кг с полезной нагрузкой 6,0 тонн и обеспечивает его дальность полета 1100 км.
Причины, препятствующие поставленной задаче: первая - это то, что винтокрыл имеет двойную раздельную систему создания и подъемной силы, и горизонтальной тяги (несущий винт и тянущие винты на крыле), что неизбежно ведет к утяжелению и усложнению аппарата, особенно с несущим винтом, имеющим управление циклического изменения его шага, шарнирное крепление лопастей и реактивный привод, а также увеличению объема регламентных работ и удорожанию эксплуатации, снижению весовой отдачи и дальности действия. Вторая - это то, что при испытаниях винтокрыла выяснилось, что его конструкция отличается очень большой сложностью и требует доводки и, в частности, при отказе одного из двух турбовинтовых двигателей, что также усложняет путевую стабилизацию из-за отсутствия синхронизирующего вала трансмиссии, что снижает надежность крейсерского полета. Расход топлива оказался более высоким, чем у вертолета, а преимущества автожирного полета нельзя было реализовать полностью, особенно на коротких маршрутах. Кроме того, уровень шума работающих реактивных сопел несущего винта при взлете и посадке был настолько высок, что делал невозможной эксплуатацию винтокрыла в пригородных районах. Третья - это то, что на режиме висения поток от несущего винта, обдувая консоли крыла и создавая значительную общую потерю в его вертикальной тяге, затормаживается. При этом скоростной воздушный поток, отбрасываемый от консолей крыла, предопределяет образование вихревых колец, которые могут на низких скоростях снижения резко уменьшать силу тяги несущего винта и создавать ситуацию неуправляемого падения. Четвертая - в винтокрыле одновинтовой несущей схемы с реактивным приводом имеют место в силовой установке и, в частности, потери в системе трубопроводов подачи сжатого воздуха к соплам несущего винта, а также опасность, создаваемая несущим винтом для вертикальных килей. Поэтому последние имеют складывающиеся верхние части, что приводит к усложнению и утяжелению конструкции и имеет тенденцию к увеличению с ростом взлетного веса винтокрыла, причем при вертикальном его взлете два тянущих винта и крыло бесполезны и при этом мощность двигателей полностью используется для работы компрессора, который подает сжатый воздух через систему трубопроводов к соплам на концах четырех лопастей несущего винта, а в горизонтальном полете лишним может оказаться и несущий винт. Все это, в частности, ограничивает возможность как выполнения в перегрузочном варианте короткого взлета и посадки при полете его как винтокрыла, так и, как следствие, увеличения при этом взлетного веса на 15-20% и весовой отдачи.
Известен самолет вертикального взлета и посадки модели «Хиллер 1045» (США) [1, стр. 173], содержащий моноплан с высокорасположенным крылом и поворотными его консолями с тянущими винтами, создающими горизонтальную и вертикальную тягу с соответствующим их отклонением от горизонтального положения, имеет силовую установку, включающую два газотурбинных двигателя с редукторами, расположенных в гондолах на консолях под крылом, трансмиссию с системой валов, хвостовое оперение с рулевыми соосными винтами и трехопорное убирающееся колесное шасси с носовой вспомогательной и главными боковыми опорами.
Признаки совпадающие - наличие поворотных элементов крыла с двумя тянущими винтами и жестким креплением их лопастей и без управления циклического изменения их шага, которые преобразуют горизонтальную тягу в вертикальную соответствующим их отклонением совместно с консолью крыла вверх от горизонтального положения на угол 90°, диапазон поворота крыла от 0° до +100°, вращение несущих винтов и рулевых соосных винтов - синхронизирующее, в двухвинтовой поперечной схеме на высокорасположенном крыле малого удлинения имеются на удлиненной хвостовой балке рулевые соосные винты управления по тангажу при висении.
Причины, препятствующие поставленной задаче: первая - это то, что консольное расположение поворотных элементов крыла с двигателем, редуктором и винтами предопределяет конструктивно сложное прямое крыло, снабженное верхней и нижней панелями обшивки и оснащенное сложной системой поворота и механизации крыла, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что поворотные консоли крыла с увеличением угла их атаки на переходных режимах полета создают опасность появления на крыле срыва потока до создания винтами необходимой подъемной силы, что снижает надежность и безопасность. Третья - это то, что для выполнения вертикального взлета/посадки и зависания имеется двойная раздельная система создания подъемной силы и вертикальной тяги продольного управления (несущие и рулевые соосные винты), что неизбежно ведет к его утяжелению, увеличению объема регламентных работ и удорожанию эксплуатации, а также увеличению аэродинамического сопротивления, так как при горизонтальном его полете рулевые соосные винты, увеличивая паразитную массу, бесполезны. Четвертая - это то, что рулевые соосные винты продольного управления, выполненные трехлопастными с изменяемым шагом, установлены в хвостовой части фюзеляжа и смонтированы на хвостовой складывающейся балке. Это усложняет конструкцию и предопределяет использование специального интегрирующего устройства управления, которое на переходных режимах полета с учетом возможного срыва потока на крыле не обеспечивает достаточную стабильностью управления и значительно увеличивает опасность, создаваемую рулевыми винтами для наземного персонала на вертолетных режимах полета.
Наиболее близким к предлагаемому изобретению является экспериментальный скоростной винтокрыл модели "Ка-22" ОКБ «Камова» (РФ), содержащий трапециевидное крыло, имеющее на его консолях движительно-несущие винтовые системы с двумя двигателями, связанными с главным редуктором соединительными валами, проложенными в крыле, и приводящими во вращение несущие винты и пропеллеры, расположенные соответственно спереди гондол двигателей и над последними на пилонах крыла, имеющий хвостовое оперение с горизонтальным стабилизатором и трехопорное колесное шасси с носовой вспомогательной и боковыми опорами.
Признаки совпадающие - на концах крыла умеренного удлинения λ=5,4 и размаха 23,8 м имеются пилоны с несущими винтами диаметром 22,5 м, вращающимися в противоположных направлениях. Каждый несущий винт, вал которого отклонен вперед по полету, имеет автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной и пропульсивной силы, а поступательное движение в скоростном полете обеспечивают в большей степени пропеллеры. Два турбовинтовых двигателя Д-25 ВК мощностью по 5500 л.с., используемых 95% их мощности при ВВП и ее меньшую часть при горизонтальном полете соответственно на привод несущих винтов (почти 15% при взлетном весе Gвз=42500 кг) при создании ими подъемной силы и пропульсивной тяги, но и пропеллеров АВ-62, расположенных спереди гондол двигателей, обеспечивающих горизонтальную тягу только при крейсерском полете, особенно, когда несущие винты станут вращаться на режиме близко к самовращению, как у автожира, создавая только подъемную силу при горизонтальном полете (авторотирующие несущие винты используются как несущие поверхности, не создавая пропульсивной тяги), а потребную при этом маршевую тягу для горизонтального полета будут создавать пропеллеры, что обеспечит винтокрылу более высокую экономичность, чем у вертолета, а высокая тяговооруженность его силовой установки, имеющая удельную нагрузку на мощность ρN=3,4 кг/л.с., может создавать диапазон скоростей полета 340…356 км/час с полезной нагрузкой (ПН) 6,0 тонн и после выполнения ВВП при взлетном его весе 37500 кг, обеспечивая при этом и дальность полета до 1100 км. Испытания Ка-22 показали, что при взлете с разбегом 190 м вес ПН возрастает до 10 тонн (при Gвз=42500 кг). При посадке «по самолетному» (Gвз=35500 кг) посадочная дистанция менее 130 м. При скорости полета свыше 150 км/ч винтокрыл вел себя как самолет и крыло при этом несет 60% его взлетного веса.
Причины, препятствующие поставленной задаче: первая - это то, что винтокрыл имеет двойную раздельную систему создания подъемной силы и горизонтальной тяги (несущие винты и пропеллеры), что неизбежно ведет к его утяжелению, особенно с тянущими пропеллерами, используемыми лишь в горизонтальном полете, но и увеличению объема регламентных работ и удорожанию эксплуатации несущих винтов, имеющих автоматы перекоса с управлением общего и циклического изменения их шага, и, как следствие, снижению весовой отдачи и дальности действия. Вторая - это то, что на режиме висения поток от несущих винтов, обдувая консоли «самолетного» крыла площадью 105,0 м2 и создавая значительную (почти 12,5%) общую потерю в их вертикальной тяге, затормаживается. При этом скоростной воздушный поток, отбрасываемый от консолей крыла и даже при отклоненных закрылках и со средней аэродинамической хордой, равной 3,9 м, предопределяет образование вихревых колец, которые могут на низких скоростях снижения резко уменьшать силу тяги несущих винтов и создавать ситуацию неуправляемого падения. Третья - это то, что в винтокрыле двухвинтовой поперечной схемы с движительно-несущей винтовой системой и двумя турбовинтовыми двигателями, смонтированными на концах высокорасположенного крыла соответственно в надкрыльевых пилонах и подкрыльных гондолах, предопределяется конструктивно сложное прямое крыло, оснащенное сложной системой редуцирования несущих винтов и пропеллеров в общем редукторе и имеющее корневую хорду больше концевой, что увеличивает и индуктивные потери. Четвертая - это то, что для обеспечения прочности и жесткости крыла большого размаха необходимо увеличивать строительную высоту крыла и площадь сечения силовых элементов, что приводит к значительному увеличению веса конструкции, увеличению лобового сопротивления и, как следствие, к снижению скорости и весовой отдачи. Пятая - это то, что расположение двух пропульсивных движителей под несущими винтами усложняет конструкции и приводит к увеличению ее габаритов и вредного сопротивления, а также к значительному повышению уровня шума вследствие взаимовлияния пропульсивных движителей и несущих винтов. Кроме того, в такой конструкции не исключалось появление самовозбуждающихся колебаний, высоких переменных напряжений и вибраций, а также и других видов динамической неустойчивости конструкции, в том числе одного из опаснейших - воздушного резонанса несущих винтов на упругом основании. Возникновение резонанса в поперечной схеме увеличивалось из-за наличия тяжелых гондол с винтомоторными установками на концах ферменных консолей крыла, имеющих главные опоры с подкосками неубирающегося колесного шасси, вследствие чего собственные частоты колебаний конструкции оказывались соизмеримы с частотой вращения несущих винтов. Другим недостатком является то, что вертолетные двигатели со свободной турбиной позволяют уменьшить частоту вращения несущих винтов только на 10-12%, а уменьшение частоты их вращения до 40% потребует использование различного рода муфт и коробок скоростей ведет, что приведет к дальнейшему увеличению веса трансмиссии, что утяжеляет конструкцию и обеспечивает, уменьшая вес топлива, более высокий удельный расход топлива и, как следствие, ограничивает возможность повышения скорости полета и дальности действия, а также показателей транспортной и топливной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном экспериментальном скоростном винтокрыле модели "Ка-22" увеличения полезной нагрузки и весовой отдачи, уменьшения потребной мощности на продольную балансировку при висении и улучшения продольной управляемости, повышения скороподъемности, скорости и дальности полета, а также исключения самовозбуждающихся колебаний, высоких переменных напряжений, вибраций и возникновения резонанса.
Отличительными признаками предлагаемого изобретения от указанного выше известного экспериментального скоростного винтокрыла модели "Ка-22", наиболее близкого к нему, являются наличие того, что он выполнен по концепции разнесенной тяги разновеликих винтов (РТРВ) и оснащен многовинтовой системой по схеме РТРВ-Х2+2, имеющей как с изменяемым вектором тяги два меньших из нее, установленных на цельно-поворотных консолях V-образного стабилизатора, так и два больших из нее несущих винта, смонтированных таким образом, что плоскости вращения их лопастей расположены между разновеликих по размаху крыльев биплана, образующих внутренними их секциями при виде спереди как бы левый и правый трапециевидный щелевой канал и закрепленных на выходных валах консольных редукторов, каждый из которых, размещенный в надкрыльном обтекателе на законцовке нижнего крыла, снабжен полой неподвижной опорой, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части консольного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть опоры закреплена в подкрыльном обтекателе верхнего крыла, образуя как бы высокорасположенный биплан с крыльями замкнутой конструкции (КЗК), имеющей при виде сверху ромбоидную конфигурацию с концевыми частями первого крыла, и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей задними меньшими винтами маршевую тягу для скоростного горизонтального полета с обеспечением третьей большей или второй средней, но и первой меньшей скорости соответственно после вертикального, но и короткого взлета соответственно в нормальном или перегрузочном его варианте на 3,5%, но и на 17% больше от нормального взлетного веса при вращающихся двух передних больших несущих винтах на режиме их авторотации, а также на режиме, близком к их самовращению соответственно от набегающего воздушного потока, но и от одного из работающих двигателей, выдающего 64% или 80% от взлетной его мощности, которые передаются соответственно полностью на задние меньшие винты или 4/5 от его мощности на два последних и 1/5 - на два передних больших несущих винта, но и обратно, при этом верхнее первое стреловидное крыло большого удлинения типа парасоль, выполняющее роль непосредственного управления подъемной силы и имеющее площадь, составляющую 45% от общей площади биплана, расположено над фюзеляжем и соединено с ним пилоном, выполняющим роль переднего киля непосредственного управления боковой силы, и представляющее собой крыло типа обратная "чайка" большего размаха, имеющего в  раза больше размаха второго крыла и внутренние и внешние секции его консолей, выполненные от законцовки переднего киля обратной стреловидности и от верхнего обтекателя соответственно с отрицательным и положительным углом поперечного V, а нижнее второе крыло биплана, представляющее собой высокорасположенное прямое крыло обратной стреловидности (КОС), снабжено по всему его размаху развитыми закрылками обратного сужения, имеющими корневые хорды односекционных закрылок в
раза больше размаха второго крыла и внутренние и внешние секции его консолей, выполненные от законцовки переднего киля обратной стреловидности и от верхнего обтекателя соответственно с отрицательным и положительным углом поперечного V, а нижнее второе крыло биплана, представляющее собой высокорасположенное прямое крыло обратной стреловидности (КОС), снабжено по всему его размаху развитыми закрылками обратного сужения, имеющими корневые хорды односекционных закрылок в  раза больше их концевых хорд и возможность их отклонения на углы 20°, 40° и 75°, причем каждая из цельно-поворотных консолей V-образного стабилизатора, имеющих раздельные узлы их поворота, создает возможность в вертикальной продольной плоскости синхронного их отклонения с меньшими винтами, располагает размахом, превышающим радиус меньших винтов и обеспечивающим на режимах вертикального взлета/посадки и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перекрытия с большими несущими винтами соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +10°/-10° и на угол ±10° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления, а также при выполнении технологии ВВП их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±10° и на угол +10°/-10° на режимах висения соответственно для путевого управления и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета, причем с целью снижения шума и вибрации конструкции от всех несущих винтов, создающих воздушные потоки, которые не взаимодействуют между собой как в передней и задней, так и в левой и правой группе винтов, выполненных без управления циклического изменения их шага и с жестким креплением их лопастей, но и создания от всех несущих винтов полной компенсации реактивных крутящих моментов при противоположном направлении вращения, например при виде сверху как по часовой стрелке и против соответственно как между правым и левым передними большими винтами, но и одинакового направления вращения между диагонально расположенными винтами, например при виде сверху по часовой стрелке и против соответственно как между правым передним большим и левым задним меньшим винтами, так и между левым передним большим и правым задним меньшим винтами, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего стреловидного и заднего КОС, закрылки обратного сужения последнего при максимальном их отклонении создают в зоне максимальных индуктивных скоростей потока от несущих винтов возможность и уменьшения на 8% потерь подъемной силы от обдувки крыла, и препятствования обратному перетеканию воздушного потока, при этом с целью повышения безопасности как при погрузке-выгрузке, так и обслуживающего персонала, но и уменьшения аэродинамической интерференции несущих винтов и меньших винтов, последние из которых смонтированы на консолях V-образного стабилизатора таким образом, что при создании соответствующим меньшим винтом горизонтальной тяги линия действия пропульсивой его силы совпадает с плоскостью вращения наступающих лопастей соответствующих несущих винтов, а при создании ими подъемной и управляющей силы при выполнении ВВП и их высоком расположении на консолях V-образного стабилизатора ось вращения каждого меньшего винта размещена параллельно хорде стабилизатора и при этом направлена от плоскости симметрии наружу, что улучшает маневренность, продольную и путевую управляемость, причем основные стойки шасси убираются в передние ниши по бокам воздухозаборных устройств двигателей, установленных в корневых обтекателях, размещенных в корневой части КОС, снижая вредную интерференцию между последним и фюзеляжем, при этом система трансмиссии, включающая наряду с синхронизирующим многоуровневым редуктором, имеющим два верхних выходных вала для передачи крутящего момента, например, от газотурбинных или турбодизельных двигателей (ГТД или ТДД) к передней группе несущих винтов, снабжен на среднем уровне третьим выходным валом с продольным трансмиссионным валом, соединенным с кормовым V-образным в поперечной плоскости промежуточным редуктором, передающим крутящий момент к задней группе меньших винтов, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов на задние меньшие винты, но и уменьшения на 36% взлетной мощности от любого из работающих двигателей, которая поровну подводится на меньшие винты, и оснащен двумя нижними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в вертолет или крылатый автожир для аварийной посадки соответственно с четырьмя или двумя авторотирующими несущими винтами.
раза больше их концевых хорд и возможность их отклонения на углы 20°, 40° и 75°, причем каждая из цельно-поворотных консолей V-образного стабилизатора, имеющих раздельные узлы их поворота, создает возможность в вертикальной продольной плоскости синхронного их отклонения с меньшими винтами, располагает размахом, превышающим радиус меньших винтов и обеспечивающим на режимах вертикального взлета/посадки и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перекрытия с большими несущими винтами соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +10°/-10° и на угол ±10° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления, а также при выполнении технологии ВВП их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±10° и на угол +10°/-10° на режимах висения соответственно для путевого управления и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета, причем с целью снижения шума и вибрации конструкции от всех несущих винтов, создающих воздушные потоки, которые не взаимодействуют между собой как в передней и задней, так и в левой и правой группе винтов, выполненных без управления циклического изменения их шага и с жестким креплением их лопастей, но и создания от всех несущих винтов полной компенсации реактивных крутящих моментов при противоположном направлении вращения, например при виде сверху как по часовой стрелке и против соответственно как между правым и левым передними большими винтами, но и одинакового направления вращения между диагонально расположенными винтами, например при виде сверху по часовой стрелке и против соответственно как между правым передним большим и левым задним меньшим винтами, так и между левым передним большим и правым задним меньшим винтами, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего стреловидного и заднего КОС, закрылки обратного сужения последнего при максимальном их отклонении создают в зоне максимальных индуктивных скоростей потока от несущих винтов возможность и уменьшения на 8% потерь подъемной силы от обдувки крыла, и препятствования обратному перетеканию воздушного потока, при этом с целью повышения безопасности как при погрузке-выгрузке, так и обслуживающего персонала, но и уменьшения аэродинамической интерференции несущих винтов и меньших винтов, последние из которых смонтированы на консолях V-образного стабилизатора таким образом, что при создании соответствующим меньшим винтом горизонтальной тяги линия действия пропульсивой его силы совпадает с плоскостью вращения наступающих лопастей соответствующих несущих винтов, а при создании ими подъемной и управляющей силы при выполнении ВВП и их высоком расположении на консолях V-образного стабилизатора ось вращения каждого меньшего винта размещена параллельно хорде стабилизатора и при этом направлена от плоскости симметрии наружу, что улучшает маневренность, продольную и путевую управляемость, причем основные стойки шасси убираются в передние ниши по бокам воздухозаборных устройств двигателей, установленных в корневых обтекателях, размещенных в корневой части КОС, снижая вредную интерференцию между последним и фюзеляжем, при этом система трансмиссии, включающая наряду с синхронизирующим многоуровневым редуктором, имеющим два верхних выходных вала для передачи крутящего момента, например, от газотурбинных или турбодизельных двигателей (ГТД или ТДД) к передней группе несущих винтов, снабжен на среднем уровне третьим выходным валом с продольным трансмиссионным валом, соединенным с кормовым V-образным в поперечной плоскости промежуточным редуктором, передающим крутящий момент к задней группе меньших винтов, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов на задние меньшие винты, но и уменьшения на 36% взлетной мощности от любого из работающих двигателей, которая поровну подводится на меньшие винты, и оснащен двумя нижними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в вертолет или крылатый автожир для аварийной посадки соответственно с четырьмя или двумя авторотирующими несущими винтами.
Благодаря наличию этих признаков решена задача, позволяющая по концепции разнесенной тяги разновеликих винтов выполнить скоростной преобразуемый винтокрыл (СПВК), который оснащен многовинтовой системой по схеме РТРВ-Х2+2, имеющей как с изменяемым вектором тяги два меньших из нее, установленных на цельно-поворотных консолях V-образного стабилизатора, так и два больших из нее несущих винта, которые для обеспечения установки плоскости вращения их лопастей между разновеликих по размаху крыльев биплана, образующих внутренними их секциями при виде спереди как бы левый и правый трапециевидный щелевой канал, смонтированы на выходных валах консольных редукторов, каждый из которых, размещенный в надкрыльном обтекателе на законцовке нижнего крыла, снабжен полой неподвижной опорой, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части консольного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть опоры закреплена в подкрыльном обтекателе верхнего крыла, образуя как бы высокорасположенный биплан с крыльями замкнутой конструкции (КЗК), имеющей при виде сверху ромбоидную конфигурацию с концевыми частями первого крыла, и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей задними меньшими винтами маршевую тягу для скоростного горизонтального полета с обеспечением третьей большей или второй средней, но и первой меньшей скорости соответственно после вертикального, но и короткого взлета соответственно в нормальном или перегрузочном его варианте на 3,5%, но и на 17% больше от нормального взлетного веса при вращающихся двух передних больших несущих винтов на режиме их авторотации, но и на режиме, близком к их самовращению соответственно от набегающего воздушного потока, но и от одного из работающих двигателей, выдающего 64% или 80% от взлетной его мощности, которые передаются соответственно полностью на задние меньшие винты или 4/5 от его мощности на два последних и 1/5 - на два передних больших несущих винта, но и обратно.
В системе КЗК верхнее первое стреловидное крыло большого удлинения типа парасоль, выполняющее роль непосредственного управления подъемной силы и имеющее площадь, составляющую 45% от общей площади биплана, расположено над фюзеляжем и соединено с ним пилоном, выполняющим роль переднего киля непосредственного управления боковой силы, и представляющее собой крыло типа обратная "чайка" большего размаха, имеющего в раза больше размаха второго крыла и внутренние и внешние секции его консолей, выполненные от законцовки переднего киля обратной стреловидности и от верхнего обтекателя соответственно с отрицательным и положительным углом поперечного V, а нижнее второе крыло биплана, представляющее собой высокорасположенное прямое крыло обратной стреловидности (КОС), снабжено по всему его размаху развитыми закрылками обратного сужения, имеющими корневые хорды односекционных закрылок в раза больше их концевых хорд и возможность их отклонения на углы 20°, 40° и 75°. Каждая из цельно-поворотных консолей V-образного стабилизатора, имеющих раздельные узлы их поворота, создают возможность в вертикальной продольной плоскости синхронного их отклонения с меньшими винтами, располагает размахом, превышающим радиус меньших винтов и обеспечивающим на режимах вертикального взлета/посадки и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перекрытия с большими несущими винтами соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +10°/-10° и на угол ±10° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления, а также при выполнении технологии ВВП их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±10° и на угол +10°/-10° на режимах висения соответственно для путевого управления и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета.
Система трансмиссии, включающая наряду с синхронизирующим многоуровневым редуктором, имеющим два верхних выходных вала для передачи крутящего момента, например, от ГТД к передней группе несущих винтов, снабжен на среднем уровне третьим выходным валом с продольным трансмиссионным валом, соединенным с кормовым V-образным в поперечной плоскости промежуточным редуктором, передающим крутящий момент к задней группе меньших винтов, и оснащен двумя нижними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в вертолет или крылатый автожир для аварийной посадки соответственно с четырьмя или двумя авторотирующими несущими винтами. Все это позволит увеличить полезную нагрузку и весовую отдачу, уменьшить потребную мощность на продольную балансировку при висении и улучшить продольную управляемость, повысить скорость и дальность полета, а также исключить возможность образования самовозбуждающихся колебаний, высоких переменных напряжений, вибраций и возникновения резонанса, но и повысить транспортную и топливную эффективность при скоростном горизонтальном полете, особенно, турбовинтового СПВК.
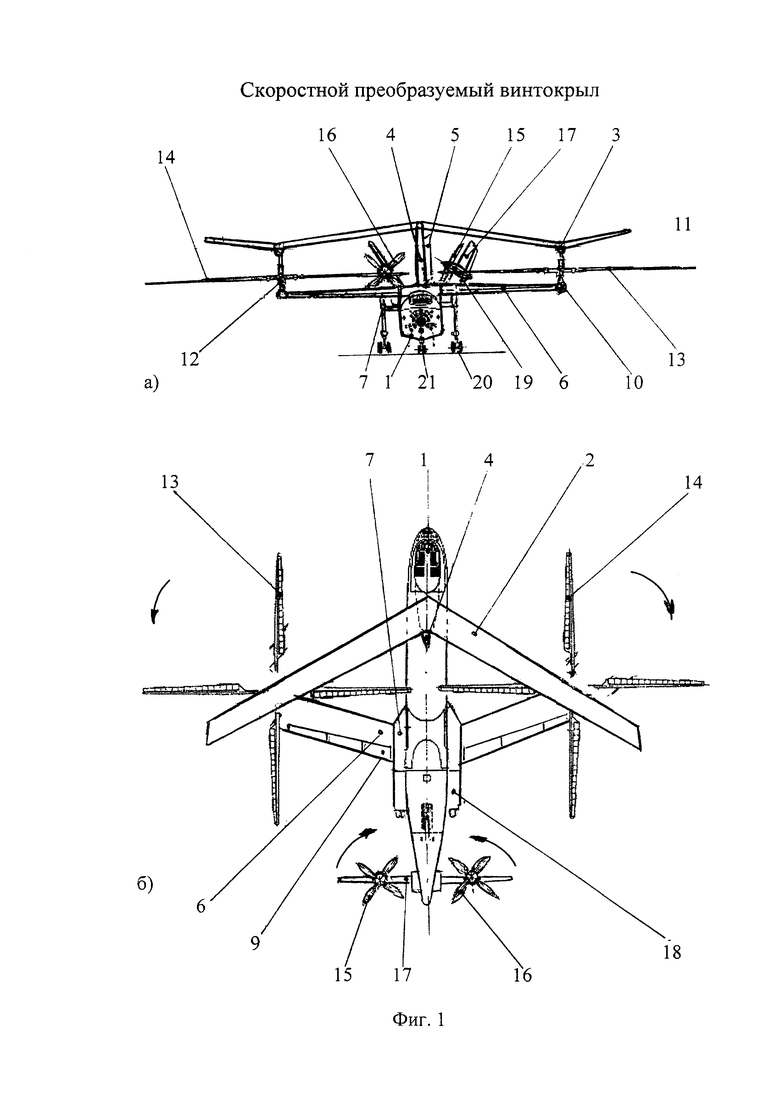
Предлагаемое изобретение в условиях различной полетной конфигурации СПВК исполнения РТРВ-Х2+2 иллюстрируется общими видами, представленными на фиг. 1.
На фиг. 1 изображен турбовинтовой СПВК на общих видах спереди и сверху соответственно а) и б) с расположением двух больших несущих винтов на концах первого КОС и между верхним крылом типа парасоль обратная «чайка» в системе КЗК и с изменяемым вектором тяги двух меньших винтов на цельно-поворотных консолях V-образного стабилизатора для различных вариантов возможного его использования:
а) в полетной конфигурации крылатого автожира или винтокрыла с двухвинтовой несущей схемой для создания подъемной силы совместно с системой КЗК типа биплан и маршевой тягой, обеспечиваемой двумя задними меньшими винтами, с условным расположением левого и правого из них соответственно при ВВП и КВП;
б) в полетной конфигурации вертолета четырехвинтовой несущей схемы РТРВ-Х2+2, снабженной разновеликими двумя передними большими и двумя меньшими несущими винтами, размещенными соответственно на концах переднего КОС в ромбовидной системе КЗК и на цельно-поворотных консолях V-образного стабилизатора.
Турбовинтовой СПВК, представленный на фиг. 1 и выполненный в виде высокорасположенного биплана типа парасоль и по концепции РТРВ-Х2+2, содержит фюзеляж 1 и большого удлинения два крыла в ромбовидной в плане системе КЗК, первое из которой крыло 2 типа парасоль обратная «чайка», имеющее подкрыльные обтекатели 3, смонтировано над фюзеляжем на переднем киле 4, имеющем рули направления 5, а второе высокорасположенное КОС 6, имеющее корневые обтекатели 7 (см. фиг. 1а), смонтировано позади и ниже первого стреловидного крыла 2, концевые части 8 последнего вынесены за ромбовидную в плане конфигурацию КЗК. Второе КОС 6, снабженное по всему размаху закрылками 9 обратного сужения, имеет на законцовках надкрыльные обтекатели 10, расположенные под подкрыльными обтекателями 3 крыла 2, выполнено с последними каплевидной формы в плане. Каждая пара обтекателей 3 и 9 связана между собой неподвижной опорой 11, установленной соосно внутри вала 12 соответствующего несущего винта левого 13 и правого 14, и жестко закреплена своим нижним концом к корпусу внутренней нижней части консольного редуктора (на фиг. 1 не показана). Два тяговых меньших винта левый 15 и правый 16, выполненных флюгерно-реверсивными, установлены на соответствующих цельно-поворотных консолях V-образного стабилизатора 17. Во время аварийной посадки при выполнении ВВП в случае отказа двигателей СПВК его несущие левый 13 и правый 14 винты передней группы, а также меньшие левый 15 и правый 16 винты задней группы несущих винтов работают на режиме авторотации и разгружают крылья 2 и 6, а во время горизонтального полета и отказа его двух двигателей лопасти тяговых меньших 15-16 винтов флюгируются для предотвращения авторотации. При этом закрылки 9 КОС 6 автоматически отклоняются на угол 40°, а при выполнении вертикального взлета/посадки и висения для уменьшения потерь в вертикальной их тяге - на угол 75°. Все четырехлопастные несущие винты выполнены без автоматов перекоса и с жестким креплением их лопастей, имеют синхронизированное вращение без взаимного их влияния и перекрытия как в передней 13-14 и задней 15-16, так и левой 13-15 и правой 14-16 группах винтов. На вертолетных режимах полета парирование реактивного момента, образуемого от несущих винтов различного диаметра, обеспечивается при противоположном направлении вращения, например, при виде сверху как по часовой стрелке и против соответственно как между правым 14 и левым 13 передними большими винтами, но и одинакового направления вращения между диагонально расположенными винтами, например, при виде сверху по часовой стрелке и против соответственно как между правым 14 передним большим и левым 15 задним меньшим винтами, так и между левым 13 передним большим и правым 16 задним меньшим винтами (см. фиг. 1б). Имеется согласование совместной работы системы путевого управления при висении, продольного и поперечного на крейсерских режимах полета, и выполнении технологии КВП с учетом соответствующего отклонения поворотных консолей V-образного стабилизатора 17, включая и ускоренного.
Турбовинтовая СУ имеет две мотогондолы 18, смонтированные в задней части корневых обтекателей 7 и снабженные, например, ГТД, выполненными для отбора их взлетной мощности с передним выводом вала. Каждый из последних, образуя с соответствующим соединительным валом и главным редуктором синхронизирующую систему, снабжен муфтой сцепления (на фиг. 1 не показаны). Избыточная тяговооруженность двух ГТД, обеспечивающая продолжение полета при одном работающем двигателе и любом промежуточном положении поворотных консолей V-образного стабилизатора 17 с задними меньшими винтами 15-16 на консольных обтекателях 19 и вращение больших передних 13-14 несущих винтов во время переходного режима, создает возможность осуществления полета или аварийной посадки и тем самым повышает безопасность выполнения полетов. Передача взлетной мощности от двух ГТД к передней 13-14 и задней 15-16 группам несущих винтов обеспечивается элементами трансмиссии, включающей: консольные редукторы больших несущих винтов, соединительные валы и синхронизирующий главный редуктор с продольным валом трансмиссии, промежуточный V-образный редуктор с тяговыми меньшими винтами, причем синхронизирующий редуктор со стороны двигателей на входных его валах снабжен муфтами сцепления-расцепления (на фиг. 1 не показаны). Трехопорное убирающееся шасси, главные боковые опоры с колесами 20 убираются в подкрыльные обтекатели 7, вспомогательная передняя опора с колесом 21 - в нишу фюзеляжа 1.
Управление турбовинтовым СПВК обеспечивается общим и дифференциальным изменением шага передней 13-14 и задней 15-16 групп несущих винтов и отклонением рулевых поверхностей: рулей направления 5 и поворотных консолей V-образного стабилизатора 17, работающих в зоне активного обдува меньших винтов 15-16. При крейсерском полете подъемная сила создается крыльями 2-6 в системе КЗК и авторотирующими большими несущими винтами 13-14, вращающимися между крыльев 2-6 биплана как бы в щелевом канале, горизонтальная тяга - меньшими винтами 15-16, на режиме висения только несущими винтами 13-14 и 15-16, на режиме перехода - крыльями 2-6 с несущими винтами 13-14 и 15-16. При переходе к вертикальному взлету-посадке (висению) закрылки 9 обратного сужения КОС 6 в системе КЗК отклоняются на максимальные их углы синхронно с поворотов меньших винтов 15-16 от горизонтального положения, которые, поворачиваясь вверх, устанавливают ось их вращения с наклоном наружу от плоскости симметрии (см. фиг. 1a). После установки поворотных меньших винтов 15-16 в данное положение и создания подъемной тяги с передними большими 13-14 несущими винтами обеспечиваются вертолетные режимы полета. При этом несущие винты большие 13-14 и задние меньшие флюгерно-реверсивные винты 15-16 имеют взаимно противоположное их вращение между соответствующими винтами (см. фиг. 1б). Поворотные консоли V-образного стабилизатора 17 с меньшими винтами 15-16 отклоняются от горизонтального положения вверх в вертикальное на угол +90° и на угол +45° соответственно при выполнении технологии ВВП и КВП на вертолетных и винтокрылых режимах полета СПВК при взлетно-посадочных режимах в перегрузочном варианте с максимальным взлетным весом. Для соответствующей посадки турбовинтового ПСВК на поверхность земли (палубы корабля) используются колеса 20 и 21 убирающегося трехопорного колесного шасси.
При висении на вертолетных режимах полета продольное управление ПСВК осуществляется изменением шага несущих винтов передних больших 13-14 и задних меньших 15-16, путевое управление - соответствующим дифференциальным отклонением поворотных консолей V-образного стабилизатора 17 с меньшими винтами 15-16. Поперечное управление обеспечивается несущими винтами левой 13-15 и правой 14-16 групп, осуществляющими поперечную балансировку при одновременном изменении шага винтов этих групп. Отсутствие при висении перекрытия в передней 13-14 и задней 15-16, но и в левой 13-15 и правой 14-16 группах несущих винтов также снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на крейсерский режим полета поворотные консоли V-образного стабилизатора 17 с меньшими винтами 15-16 задней группы синхронно устанавливаются в горизонтальное положение (см. фиг. 1a), после чего убираются закрылки 9 крыла 6 и затем производится горизонтальный скоростной полет, при котором путевое управление обеспечивается рулем направления 5 переднего киля 4, имеющего обратную стреловидность для максимального выноса вперед крыла 2 типа парасоль обратная «чайка». Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением поворотных консолей V-образного стабилизатора 17 с тяговыми меньшими винтами 15-16 соответственно. На крейсерских режимах скоростного полета СПВК при создании горизонтальной маршевой тяги его меньшие тяговые винты 15-16, передние большие несущие винты 13-14 имеют взаимно противоположное их вращение в каждой передней и задней группе винтов и тем самым соответственно увеличивают КПД винтов, устраняют гироскопический эффект и обеспечивают более плавное обтекание крыльев 2-6 в системе КЗК и весьма повышают эффективность движительной системы 15-16 и несущей группы больших винтов 13-14.
Таким образом, многоцелевой СПВК, выполненный по концепции РТРВ-Х2+2, в которой два больших несущих винта смонтированы на вертикальных опорах, установленных между корпусов обтекателей высокорасположенного биплана как нижнего второго крыла обратной стреловидности, так и верхнего первого стреловидного крыла типа парасоль обратная "чайка", и два меньших винта с изменяемым вектором тяги - на цельно-поворотных консолях V-образного стабилизатора, представляет собой комбинированный скоростной вертолет с турбовинтовой СУ. Задние меньшие флюгерно-реверсивные винты, создающие вертикальную с соответствующим отклонением горизонтальную тягу, обеспечивают необходимые управляющие моменты и уменьшение дистанции при посадке с пробегом. Заднее крыло обратной стреловидности меньшего размаха находится ниже переднего крыла типа парасоль обратная «чайка» и оба в системе КЗК, создавая дополнительную подъемную силу, разгружают несущие винты, что и предопределяет наравне с высокой тяговооруженностью СУ возможность легко реализовать выполнение технологии ВВП и КВП, но и КВВП.
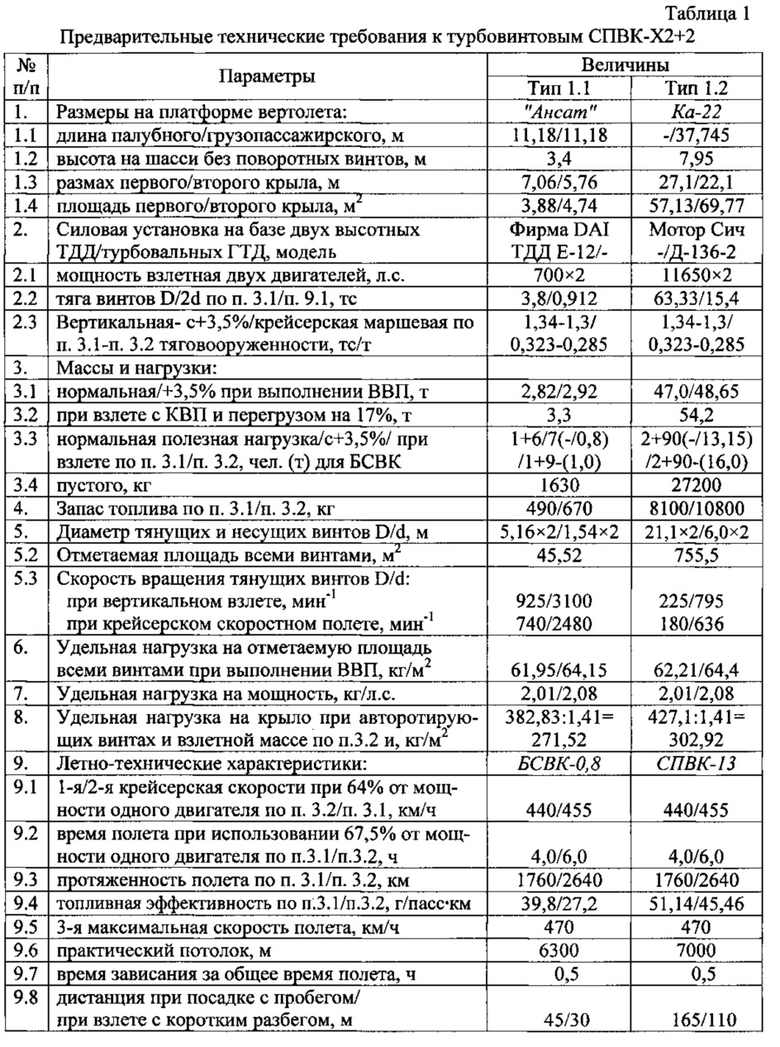
Поэтому только на базе имеющихся конструкций вертолетов можно, сокращая сроки освоения турбовинтовых СПВК и беспилотных скоростных винтокрылов (БСВК) и, особенно, с дизельной СУ проводить дальнейшие исследования по созданию широкого их семейства, включая и СПВК-13 тяжелого класса (см. табл. 1). Однако нет никаких сомнений в том, что на пути освоения таких СПВК и БСКВ, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Это в первую очередь относится к решению проблем аэродинамической интерференции больших несущих винтов и тяговых меньших винтовых, расположенных по концепции РТРВ-Х2+2, а также возможности обеспечения устойчивости, управляемости и маневренности СПВК исполнения РТРВ-Х2+2 и, особенно, на режимах ВВП и при совместной работе больших и меньших несущих винтов.
Поэтому не исключено для отработки технологии РТРВ-Х2+2 освоить на платформе вертолета "Ансат" с ЭДСУ и тяжелого класса БСВК с дизельной СУ и взлетным весом 2820 и 2920 кг для перевозки 0,9 и 1,0 т груза на дальность до 1760 и 2640 км соответственно при выполнении ВВП и КВП. Несомненно, с течением времени широкое использование дизельной СУ позволит добиться снижения расхода топлива почти на треть, что немаловажно и для коммерческих СПВК. Кроме того, только использование дизельного двигателя с турбокомпрессором позволит также добиться снижения выбросов углекислого газа на 40% по сравнению с обычным турбовальным двигателем, а также снижения выбросов оксида азота на 53%. Это позволит достойно конкурировать с англо-итальянской фирмой "AgustaWestland", осваивающей коммерческий конвертоплан двухвинтовой поперечной схемы модели AW-609.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
Изобретение относится к области авиации, в частности к конструкциям винтокрылов. Скоростной преобразуемый винтокрыл (СПВК) содержит трапециевидное крыло, имеющее на консолях движительно-несущие винтовые системы с двумя двигателями, хвостовое оперение с горизонтальным стабилизатором и трехопорное колесное шасси. СПВК оснащен многовинтовой системой разнесенной тяги, имеющей два меньших винта, установленных на цельно-поворотных консолях V-образного стабилизатора, и два больших смонтированных на выходных валах консольных редукторов, каждый из которых размещен в надкрыльном обтекателе на законцовке нижнего крыла. Полая неподвижная опора установлена соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу, а выступающая из вала верхняя часть опоры закреплена в подкрыльном обтекателе верхнего крыла. СПВК имеет возможность преобразования полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой. Обеспечивается увеличение полезной нагрузки и весовой отдачи, уменьшение потребной мощности на продольную балансировку при висении и улучшение продольной управляемости. 1 ил., 1 табл.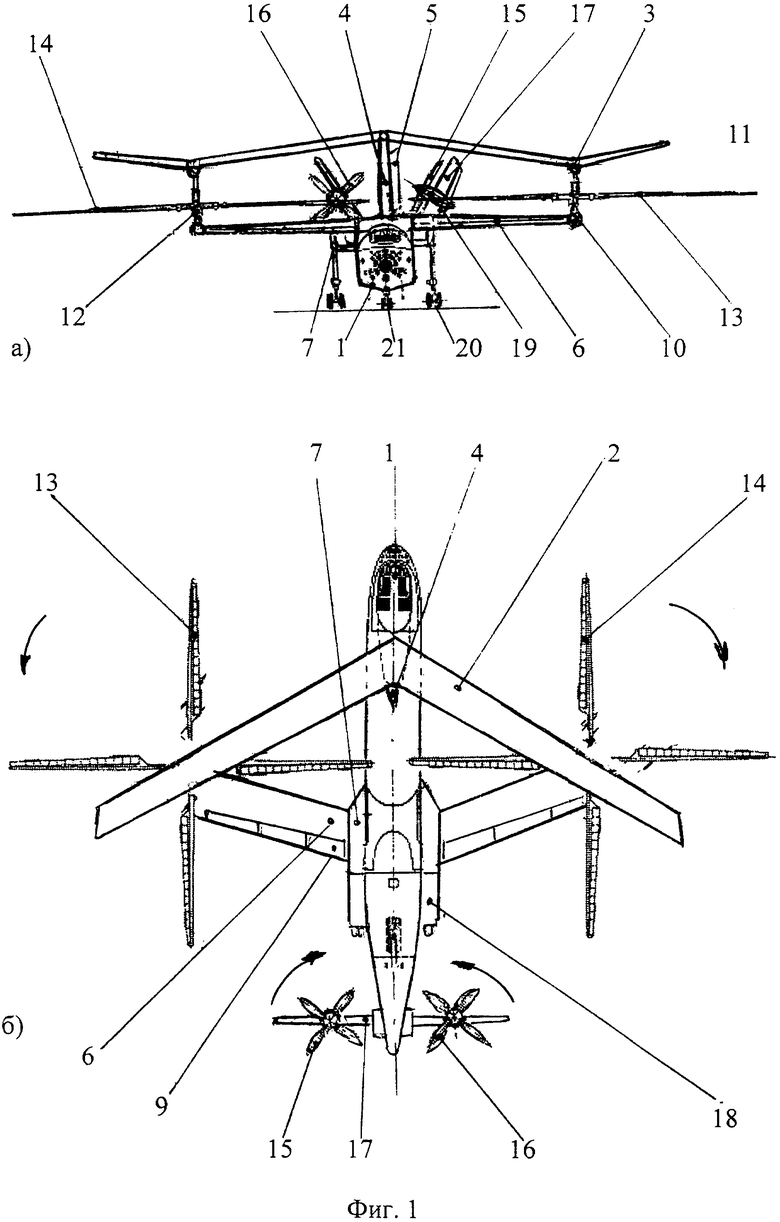
Скоростной преобразуемый винтокрыл, содержащий трапециевидное крыло, имеющее на его консолях движительно-несущие винтовые системы с двумя двигателями, связанными с главным редуктором соединительными валами, проложенными в крыле, и приводящими во вращение несущие винты и пропеллеры, расположенные соответственно спереди гондол двигателей и над последними на пилонах крыла, имеет хвостовое оперение с горизонтальным стабилизатором и трехопорное колесное шасси с носовой вспомогательной и боковыми опорами, отличающийся тем, что он выполнен по концепции разнесенной тяги разновеликих винтов (РТРВ) и оснащен многовинтовой системой по схеме РТРВ-Х2+2, имеющей как с изменяемым вектором тяги два меньших из нее, установленных на цельно-поворотных консолях V-образного стабилизатора, так и два больших из нее несущих винта, смонтированных таким образом, что плоскости вращения их лопастей расположены между разновеликих по размаху крыльев биплана, образующих внутренними их секциями при виде спереди как бы левый и правый трапециевидный щелевой канал и закрепленных на выходных валах консольных редукторов, каждый из которых, размещенный в надкрыльном обтекателе на законцовке нижнего крыла, снабжен полой неподвижной опорой, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части консольного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть опоры закреплена в подкрыльном обтекателе верхнего крыла, образуя как бы высокорасположенный биплан с крыльями замкнутой конструкции (КЗК), имеющей при виде сверху ромбоидную конфигурацию с концевыми частями первого крыла, и снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей задними меньшими винтами маршевую тягу для скоростного горизонтального полета с обеспечением третьей большей или второй средней, но и первой меньшей скорости соответственно после вертикального, но и короткого взлета соответственно в нормальном или перегрузочном его варианте на 3,5%, но и на 17% больше от нормального взлетного веса при вращающихся двух передних больших несущих винтах на режиме их авторотации, но и на режиме, близком к их самовращению, соответственно от набегающего воздушного потока, но и от одного из работающих двигателей, выдающего 64% или 80% от взлетной его мощности, которые передаются соответственно полностью на задние меньшие винты или 4/5 от его мощности на два последних и 1/5- на два передних больших несущих винта, но и обратно, при этом верхнее первое стреловидное крыло большого удлинения типа парасоль, выполняющее роль непосредственного управления подъемной силы и имеющее площадь, составляющую 45% от общей площади биплана, расположено над фюзеляжем и соединено с ним пилоном, выполняющим роль переднего киля непосредственного управления боковой силы, и представляющее собой крыло типа обратная "чайка" большего размаха, имеющее в  раза больше размаха второго крыла, и внутренние и внешние секции его консолей, выполненные от законцовки переднего киля обратной стреловидности и от верхнего обтекателя соответственно с отрицательным и положительным углом поперечного V, а нижнее второе крыло биплана, представляющее собой высокорасположенное прямое крыло обратной стреловидности (КОС), снабжено по всему его размаху развитыми закрылками обратного сужения, имеющими корневые хорды односекционных закрылок в
раза больше размаха второго крыла, и внутренние и внешние секции его консолей, выполненные от законцовки переднего киля обратной стреловидности и от верхнего обтекателя соответственно с отрицательным и положительным углом поперечного V, а нижнее второе крыло биплана, представляющее собой высокорасположенное прямое крыло обратной стреловидности (КОС), снабжено по всему его размаху развитыми закрылками обратного сужения, имеющими корневые хорды односекционных закрылок в  раза больше их концевых хорд и возможность их отклонения на углы 20°, 40° и 75°, причем каждая из цельно-поворотных консолей V-образного стабилизатора, имеющих раздельные узлы их поворота, создает возможность в вертикальной продольной плоскости синхронного их отклонения с меньшими винтами, располагает размахом, превышающим радиус меньших винтов и обеспечивающим на режимах вертикального взлета/посадки и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перекрытия с большими несущими винтами соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +10°/-10° и на угол ±10° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления, а также при выполнении технологии ВВП их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±10° и на угол +10°/-10° на режимах висения соответственно для путевого управления и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета, причем с целью снижения шума и вибрации конструкции от всех несущих винтов, создающих воздушные потоки, которые не взаимодействуют между собой как в передней и задней, так и в левой и правой группах винтов, выполненных без управления циклического изменения их шага и с жестким креплением их лопастей, но и создания от всех несущих винтов полной компенсации реактивных крутящих моментов при противоположном направлении вращения, например, при виде сверху как по часовой стрелке и против соответственно как между правым и левым передними большими винтами, но и одинакового направления вращения между диагонально расположенными винтами, например, при виде сверху по часовой стрелке и против соответственно как между правым передним большим и левым задним меньшим винтами, так и между левым передним большим и правым задним меньшим винтами, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего стреловидного и заднего КОС, закрылки обратного сужения последнего при максимальном их отклонении создают в зоне максимальных индуктивных скоростей потока от несущих винтов возможность и уменьшения на 8% потерь подъемной силы от обдувки крыла, и препятствования обратному перетеканию воздушного потока, при этом с целью повышения безопасности как при погрузке-выгрузке, так и обслуживающего персонала, но и уменьшения аэродинамической интерференции несущих винтов и меньших винтов, последние из которых смонтированы на консолях V-образного стабилизатора таким образом, что при создании соответствующим меньшим винтом горизонтальной тяги линия действия пропульсивой его силы совпадает с плоскостью вращения наступающих лопастей соответствующих несущих винтов, а при создании ими подъемной и управляющей силы при выполнении ВВП и их высоком расположении на консолях V-образного стабилизатора ось вращения каждого меньшего винта размещена параллельно хорде стабилизатора и при этом направлена от плоскости симметрии наружу, что улучшает маневренность, продольную и путевую управляемость, причем основные стойки шасси убираются в передние ниши по бокам воздухозаборных устройств двигателей, установленных в корневых обтекателях, размещенных в корневой части КОС, снижая вредную интерференцию между последним и фюзеляжем, при этом система трансмиссии, включающая наряду с синхронизирующим многоуровневым редуктором, имеющим два верхних выходных вала для передачи крутящего момента, например, от газотурбинных или турбодизельных двигателей (ГТД или ТДД) к передней группе несущих винтов, снабжен на среднем уровне третьим выходным валом с продольным трансмиссионным валом, соединенным с кормовым V-образным в поперечной плоскости промежуточным редуктором, передающим крутящий момент к задней группе меньших винтов, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов на задние меньшие винты, но и уменьшения на 36% взлетной мощности от любого из работающих двигателей, которая поровну подводится на меньшие винты и оснащен двумя нижними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в вертолет или крылатый автожир для аварийной посадки соответственно с четырьмя или двумя авторотирующими несущими винтами.
раза больше их концевых хорд и возможность их отклонения на углы 20°, 40° и 75°, причем каждая из цельно-поворотных консолей V-образного стабилизатора, имеющих раздельные узлы их поворота, создает возможность в вертикальной продольной плоскости синхронного их отклонения с меньшими винтами, располагает размахом, превышающим радиус меньших винтов и обеспечивающим на режимах вертикального взлета/посадки и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перекрытия с большими несущими винтами соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +10°/-10° и на угол ±10° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления, а также при выполнении технологии ВВП их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±10° и на угол +10°/-10° на режимах висения соответственно для путевого управления и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета, причем с целью снижения шума и вибрации конструкции от всех несущих винтов, создающих воздушные потоки, которые не взаимодействуют между собой как в передней и задней, так и в левой и правой группах винтов, выполненных без управления циклического изменения их шага и с жестким креплением их лопастей, но и создания от всех несущих винтов полной компенсации реактивных крутящих моментов при противоположном направлении вращения, например, при виде сверху как по часовой стрелке и против соответственно как между правым и левым передними большими винтами, но и одинакового направления вращения между диагонально расположенными винтами, например, при виде сверху по часовой стрелке и против соответственно как между правым передним большим и левым задним меньшим винтами, так и между левым передним большим и правым задним меньшим винтами, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего стреловидного и заднего КОС, закрылки обратного сужения последнего при максимальном их отклонении создают в зоне максимальных индуктивных скоростей потока от несущих винтов возможность и уменьшения на 8% потерь подъемной силы от обдувки крыла, и препятствования обратному перетеканию воздушного потока, при этом с целью повышения безопасности как при погрузке-выгрузке, так и обслуживающего персонала, но и уменьшения аэродинамической интерференции несущих винтов и меньших винтов, последние из которых смонтированы на консолях V-образного стабилизатора таким образом, что при создании соответствующим меньшим винтом горизонтальной тяги линия действия пропульсивой его силы совпадает с плоскостью вращения наступающих лопастей соответствующих несущих винтов, а при создании ими подъемной и управляющей силы при выполнении ВВП и их высоком расположении на консолях V-образного стабилизатора ось вращения каждого меньшего винта размещена параллельно хорде стабилизатора и при этом направлена от плоскости симметрии наружу, что улучшает маневренность, продольную и путевую управляемость, причем основные стойки шасси убираются в передние ниши по бокам воздухозаборных устройств двигателей, установленных в корневых обтекателях, размещенных в корневой части КОС, снижая вредную интерференцию между последним и фюзеляжем, при этом система трансмиссии, включающая наряду с синхронизирующим многоуровневым редуктором, имеющим два верхних выходных вала для передачи крутящего момента, например, от газотурбинных или турбодизельных двигателей (ГТД или ТДД) к передней группе несущих винтов, снабжен на среднем уровне третьим выходным валом с продольным трансмиссионным валом, соединенным с кормовым V-образным в поперечной плоскости промежуточным редуктором, передающим крутящий момент к задней группе меньших винтов, выполнен с возможностью плавного перераспределения мощности при переходе с вертикального взлета или зависания в режим скоростного горизонтального полета с больших несущих винтов на задние меньшие винты, но и уменьшения на 36% взлетной мощности от любого из работающих двигателей, которая поровну подводится на меньшие винты и оснащен двумя нижними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в вертолет или крылатый автожир для аварийной посадки соответственно с четырьмя или двумя авторотирующими несущими винтами.
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| US 2014034774 A1, 06.02.2014 | |||
| Механизм переключения передач для трансмиссии машин | 1959 |
|
SU125148A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ, ИМЕЮЩИЙ ЛЯМБДА-ОБРАЗНУЮ КОРОБЧАТУЮ КОНФИГУРАЦИЮ КРЫЛА | 2010 |
|
RU2531537C2 |

