Настоящее изобретение касается гибридного летательного аппарата с вращающейся несущей поверхностью, способного быстро преодолевать большое расстояние.
Эта продвинутая концепция винтокрылого летательного аппарата направлена на сочетание приемлемой стоимости эффективности вертикального полета обычного вертолета с высокоскоростными характеристиками перемещения, предполагающими использование тяговых воздушных винтов и установку современных двигателей.
Для лучшего понимания объекта изобретения следует напомнить, что основные летательные средства соответствуют самолетам и винтокрылым летательным аппаратам.
Под винтокрылым летательным аппаратом подразумевают любой аппарат, подъемная сила которого полностью или частично обеспечивается, по меньшей мере, одной вращающейся несущей поверхностью. Вращающаяся несущая поверхность содержит обычно, по меньшей мере, один винт большого диаметра и с, по существу, вертикальным валом, когда аппарат находится на земле.
Под категорию винтокрылых летательных аппаратов подпадают несколько различных типов.
Прежде всего это вертолет, в котором, по меньшей мере, один несущий винт, приводимый соответствующим двигателем, обеспечивает одновременно подъем и тягу.
Вертолет может быть оснащен двумя подъемными винтами, обеспечивающими подъемную силу и тягу аппарата. Эти два винта могут быть расположены один за другим или быть соосными.
Известен также автожир, который является винтокрылым летательным аппаратом, винт которого не получает мощность, но обеспечивает подъемную силу самовращением под влиянием скорости движения вперед аппарата.
Кроме того, комбинированный вертолет является винтокрылым летательным аппаратом, промежуточным между вертолетом и автожиром, винт которого обеспечивает только подъемную силу. Этот винт обычно приводится во вращение двигательной установкой в фазах взлета, висения или вертикального полета и приземления, наподобие вертолета. Комбинированный вертолет содержит также дополнительную систему тяги, отличную, в основном, от системы винтов. При полете вперед винт обеспечивает также подъемную силу, но только в режиме самовращения, то есть без передачи мощности на упомянутый винт.
Кроме того, известен конвертоплан, который взлетает и приземляется, как вертолет, а в крейсерском режиме летит, как автожир.
Среди таких различных винтокрылых летательных аппаратов вертолет является наиболее простым, так что он добился признания несмотря на то, что максимальная скорость перемещения вертолета порядка 300 км/час является меньшей, чем скорость аппаратов типа конвертоплана или винтокрыла, технически более сложных и более дорогостоящих.
Известен другой новаторский вариант, названный "гибридным вертолетом", описанный в документе ЕР 2148814.
Документ ЕР 2105378 представляет летательный аппарат, снабженный вращающейся несущей поверхностью, двумя тяговыми воздушными винтами и стабилизирующей плоскостью спереди фюзеляжа.
Расположение воздушных винтов позволяет освободить боковые стороны фюзеляжа летательного аппарата, например, для посадки и высадки пассажиров. Более того, эти воздушные винты расположены сзади летательного аппарата, что позволяет минимизировать шум, производимый воздушными винтами и воспринимаемый пассажирами.
Отмечается также, что летательный аппарат не содержит хвостовой балки и вертикального оперения, что позволяет, по меньшей мере, минимизировать явление, известное под названием "tail shake" на английском языке.
В соответствии с другим аспектом стабилизирующая поверхность, расположенная спереди летательного аппарата, позволяет, по меньшей мере, минимизировать явление, известное под названием "неровность пространственного положения".
Кроме того, известен винтокрылый летательный аппарат, содержащий два соосных несущих винта, совместно обеспечивающих подъемную силу летательного аппарата и не требующих использования устройства компенсации реактивного момента.
Этот винтокрылый летательный аппарат содержит также воздушный винт, расположенный сзади аппарата для обеспечения тяги при крейсерском полете аппарата, систему отключения, позволяющую включать и отключать тяговый воздушный винт.
Этот винтокрылый летательный аппарат имеет также относительно сложную систему трансмиссии мощности несущим винтам.
Кроме того, воздушный винт потенциально расположен в спутном следе фюзеляжа и несущего винта, что может вызывать шум и явление, известное под названием "tail shake" (вибрация хвоста).
Кроме того, известен винтокрылый летательный аппарат, снабженный несущим винтом, обеспечивающим подъемную силу летательного аппарата при висении, полностью или частично подъемную силу в крейсерском полете, а также часть тяги в крейсерском полете.
Кроме того, винтокрылый летательный аппарат содержит хвостовой винт, выполняющий функцию компенсации реактивного момента и контроля по рысканию летательного аппарата, крыло, обеспечивающее дополнительную подъемную силу в крейсерском полете, и неотключаемый воздушный винт, расположенный сзади аппарата для участия в создании тяги.
Отмечается, в частности, что при висении невозможно остановить вращение воздушного винта, этот воздушный винт требует мощности даже при нулевой тяге.
Документ US 3448946 предлагает комбинированный винтокрылый летательный аппарат с тяговым хвостовым винтом и хвостовым винтом компенсации реактивного момента.
Документ US 3105659 описывает двухрежимный летательный аппарат, работающий в режиме вертолета и в режиме автожира.
Документ US 2002/0011539 представляет летательный аппарат, снабженный тяговыми воздушными винтами с функцией компенсации реактивного момента.
Документ CN1098688 представляет устройство, содержащее дифференциальный механизм.
Известны также документы US 2665859 A, US 2005/151001 A1, GB 215366 A, GB 2197629 A, и GB 895590 A.
Объектом настоящего изобретения является предложение летательного аппарата с вращающейся несущей поверхностью, предназначенной, по меньшей мере, для ограничения упомянутых выше недостатков.
В соответствии с изобретением летательный аппарат содержит фюзеляж, двигательную установку, вращающуюся несущую поверхность, снабженную, по меньшей мере, несущим винтом, обеспечивающим, по меньшей мере, частично, подъемную силу летательного аппарата, крыло, обеспечивающее, по меньшей мере, частично, подъемную силу летательного аппарата в крейсерском полете, при этом крыло содержит два полукрыла, проходящие с одной и другой стороны фюзеляжа, при этом летательный аппарат содержит, по меньшей мере, два тяговых воздушных винта, расположенные с одной и другой стороны фюзеляжа и размещенные каждый на полукрыле, причем летательный аппарат содержит хвостовой винт для компенсации реактивного момента и контроля по рысканию.
Кроме того, летательный аппарат содержит систему трансмиссии, связывающую двигательную установку с каждым несущим винтом и с хвостовым винтом для постоянного привода каждого несущего винта и хвостового винта в полете, причем эта система трансмиссии связывает двигательную установку с каждым воздушным винтом через дифференциальный механизм, контролируемый по требованию пилота или механизма автопилота для того, чтобы каждый воздушный винт мог быть приведен в действие в крейсерском полете и мог не приводиться во вращение двигательной установкой на земле и/или при висении.
Под "крейсерским полетом" понимают фазу полета, осуществляемую с продольной ненулевой скоростью.
Напротив, под "висением" понимают фазу полета, осуществляемую с нулевой продольной скоростью.
Кроме того, контроль рыскания и функция компенсации реактивного момента обеспечиваются, в частности, хвостовым винтом.
Подъемная сила летательного аппарата обеспечивается вращающейся несущей поверхностью и крылом. Понятно, что участие крыла в подъемной силе увеличивается с увеличением скорости движения вперед летательного аппарата.
Кроме того, тяга летательного аппарата может обеспечиваться вращающейся несущей поверхностью и воздушными винтами.
В соответствии с изобретением дифференциальный механизм позволяет привести во вращение или не приводить во вращение воздушные винты по требованию пилота или системы автопилота.
Таким образом, становится, в частности, возможным приводить в действие воздушные винты в крейсерском полете, например, для достижения большой скорости продвижения и не приводить в действие воздушные винты на земле и/или при висении.
Изобретение, таким образом, имеет следующие преимущества по сравнению с обычным вертолетом:
- способность лететь с большой скоростью благодаря тяге воздушных винтов и аэродинамической разгрузке вращающейся несущей поверхности благодаря крылу,
- способность ускорять и тормозить на горизонтальном участке при, по существу, нулевом пространственном положении благодаря воздушным винтам,
- способность подниматься с очень большими вертикальными скоростями,
- способность выдерживать очень большие коэффициенты нагрузки благодаря крылу,
- способность управлять пространственным положением при висении, если воздушные винты отключены,
- лучшее общее аэродинамическое благодаря крылу.
Кроме того, обеспечивая остановку воздушных винтов на земле, дифференциальный механизм способствует уменьшению шума, передаваемого земле, минимизации рисков несчастных случаев для персонала, передвигающегося на земле вблизи аппарата, и, в частности, для пассажиров, которым нужно подняться или выйти из аппарата, хотя вращающаяся несущая поверхность продолжает вращаться.
Обеспечивая остановку воздушных винтов при висении, дифференциальный механизм приводит к минимизации необходимой мощности и излучаемого шума и позволяет персоналу на борту работать при боковом открывании фюзеляжа вертолета.
Кроме того, следует отметить, что система управления шагом воздушных винтов может быть упрощена в той мере, что она не требует ни значительной скорости реакции, ни резервирования. Действительно, воздушные винты не участвуют в контроле по рысканию летательного аппарата или участвуют только как дополнение к хвостовому винту в этом контроле по рысканию, при этом система управления шагом воздушных винтов не должна обладать скоростью и высокой надежностью. Эта система управления шагом воздушных винтов может, например, ограничиться классическим приводом шага воздушного винта, как на самолете.
Кроме того, установка межосевого расстояния воздушных винтов не зависит от функции компенсации реактивного момента, эта функция, по меньшей мере, в основном выполняется хвостовым винтом. Таким образом, нет необходимости соблюдать компромисс между положением воздушных винтов относительно фюзеляжа и размерами крыла, которое их несет.
Кроме того, каждый воздушный винт может быть оптимизирован для создания тяги без компромисса с работой в режиме, называемом "реверсом", для участия в функции компенсации реактивного момента.
Такой летательный аппарат может содержать одно или несколько нижеследующих дополнительных характеристик.
Так, дифференциальный механизм отдельного воздушного винта может содержать:
- входную шестерню, приводимую двигательной установкой через боковую часть системы трансмиссии, при этом входная шестерня жестко соединена с оболочкой, несущей, по меньшей мере, одно сателлитное зубчатое колесо,
- вал холостого хода, проходящий через входную шестерню, при этом вал холостого хода жестко соединен во вращении с входным планетарным зубчатым колесом, имеющим зацепление с сателлитным зубчатым колесом и отсоединенным во вращении от входной шестерни,
- вал воздушного винта, приводящий во вращение отдельный воздушный винт, этот вал воздушного винта жестко соединен во вращении с выходным планетарным зубчатым колесом, это выходное планетарное зубчатое колесо находится в зацеплении с сателлитным зубчатым колесом,
- тормоз воздушного винта для торможения вала воздушного винта и входной тормоз для торможения вала холостого хода.
Такой дифференциальный механизм особенно прост и легок при внедрении.
Согласно первому применению дифференциального механизма при торможении вала воздушного винта и освобождении вала холостого хода система трансмиссии приводит в действие вал холостого хода, при этом воздушный винт остановлен.
При отсутствии органов - потребителей энергии, мощность, потребляемая валом холостого хода, является незначительной. Мощность, выдаваемая двигательной установкой вращающейся несущей поверхности и хвостовому винту, является, напротив, максимальной, даже если система трансмиссии, тем не менее, постоянно приводит в действие установленный на крыле орган, в данном случае вал холостого хода на представленной фигуре.
Согласно второму применению дифференциального механизма при торможении вала холостого хода и освобождении вала воздушного винта система трансмиссии приводит в действие воздушный винт, при этом вал холостого хода остановлен.
Для этого летательный аппарат может содержать средство контроля для:
- управления тормозом воздушного винта для блокирования вала воздушного винта и управления входным тормозом для освобождения вала холостого хода для осуществления функции остановки воздушного винта, обеспечивая привод вала холостого хода боковой частью,
- управления тормозом воздушного винта для освобождения вала воздушного винта и управления входным тормозом для блокирования вала холостого хода для выполнения функции передачи вращательного движения от боковой части валу воздушного винта для приведения во вращение этого воздушного винта.
Средством контроля может являться двухпозиционный рычаг, позволяющий затребовать одно или другое из упомянутых применений дифференциального механизма.
В соответствии с первым вариантом вал холостого хода находится в зацеплении с коробкой приводов агрегатов.
Функцией этой коробки приводов агрегатов является подача электрической, гидравлической, пневматической мощности или иного посредством вращения. Например, коробка привода агрегатов может активировать механизм складывания полукрыла либо также, например, лебедку, встроенную в полукрыло.
Коробка привода агрегатов может быть электрическим органом, позволяющим генерировать электрический ток вследствие вращения вала холостого хода.
В соответствии со вторым вариантом вал холостого хода связан с системой накопления кинетической энергии для дополнительного снабжения мощностью в случае отказа двигателя.
Известны такие системы, в частности, в автомобильной отрасли, где эти системы встроены в колеса гоночных автомобилей.
Понятно, что каждый вал холостого хода может также иметь зацепление с коробкой привода агрегатов и быть связан с системой накопления кинетической энергии.
В соответствии с другим аспектом система трансмиссии может содержать центральную часть, связанную с хвостовым винтом и с вращающейся несущей поверхностью, а также боковую часть посредством воздушного винта, связывающую упомянутую центральную часть с дифференциальным механизмом воздушного винта, при этом узел содержит полукрылья, а также воздушные винты, при этом боковые части и дифференциальные механизмы выполнены съемными.
Возможно также преобразовать летательный аппарат для перехода от конфигурации с вращающейся несущей поверхностью и неподвижной несущей поверхностью к конфигурации, соответствующей обычному вертолету.
Кроме того, система трансмиссии может связывать двигательную установку:
- с первым воздушным винтом с помощью первого дифференциального механизма, контролируемого пилотом, для того, чтобы этот первый воздушный винт мог приводиться в действие двигательной установкой в крейсерском полете и при висении и мог не приводиться во вращение двигательной установкой на земле и при висении,
- со вторым воздушным винтом с помощью второго дифференциального механизма, контролируемого пилотом, для того, чтобы этот второй воздушный винт мог приводиться в действие двигательной установкой в крейсерском полете и при висении и мог не приводиться во вращение двигательной установкой на земле и при висении.
Так, двигательная установка может:
- в соответствии с первым режимом работы приводить в действие несущую поверхность, хвостовой винт и воздушные винты в крейсерском полете для достижения больших скоростей,
- в соответствии со вторым режимом работы приводить в действие несущую поверхность и хвостовой винт на земле, при этом воздушные винты остановлены, в частности, для того, чтобы защитить людей, находящихся вблизи летательного аппарата, и для ограничения шума, производимого летательным аппаратом.
Кроме того, в соответствии с третьим режимом работы двигательная установка приводит в действие несущую поверхность и хвостовой винт при висении, при этом воздушные винты остановлены.
Способность останавливать воздушные винты при висении может также ограничить, по меньшей мере, один из следующих недостатков:
- уровень звука,
- риски разрушения воздушных винтов при приводнении или при приземлении на неподготовленную площадку,
- риски разрушения воздушных винтов в случае посадки на площадку с сильным наклоном,
- риски разрушения воздушных винтов в случае прогиба шасси летательного аппарата,
- способность эксплуатировать дополнительное оборудование, например лебедку, на уровне боковой двери фюзеляжа в процессе висения без риска взаимодействия с воздушным винтом.
Кроме того, способность останавливать воздушные винты при висении может придать летательному аппарату оптимизированное по мощности кпд при висении по сравнению с летательными аппаратами, содержащими неотключаемые воздушные винты.
В соответствии с четвертым режимом работы двигательная установка приводит в действие при висении вращающуюся несущую поверхность, хвостовой винт и один воздушный винт, а другой воздушный винт остается неподвижным.
Таким образом, воздушный винт, приводимый во вращение при висении, взаимодействует с хвостовым винтом для компенсации влияния на фюзеляж вращающего момента, создаваемого несущим винтом вращающейся несущей поверхности.
Отсюда следует оптимизированный кпд по мощности в функции момента компенсации реактивного момента.
Наконец, каждое полукрыло проходит поперечно из упомянутого фюзеляжа из зоны места стыка к концевой зоне, проходя через промежуточную зону, несущую воздушный винт, причем концевая зона связана с промежуточной зоной шарнирным соединением, контролируемым для того, чтобы концевой зоной можно было маневрировать для направления к земле при висении для уменьшения поверхности крыла, на которое воздействует воздух, проходящий через вращающуюся несущую поверхность, и для защиты воздушного винта от контакта с землей.
Вследствие этого отрицательная подъемная сила крыла при висении минимизирована.
Отмечается, что концевая зона крыла может также служить опорой в положении, называемом "сложенным", при этом концевой зоной маневрируют для направления к земле в этом сложенном положении.
Шарнирным соединением можно маневрировать с помощью двигателя, питаемого от коробки привода агрегатов, путем взаимодействия с валом холостого хода дифференциального механизма.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылкой на сопровождающую фигуру.
Отмечается, что на фигуре представлены три ортогональных одно другому направления X, Y и Z.
Первое направление X является продольным. Термин "продольный" относится к любому направлению, параллельному первому направлению Х.
Второе направление Y является поперечным. Термин "поперечный" относится к любому направлению, параллельному второму направлению Y.
Наконец, третье направление Z является вертикальным. Выражение "вертикальный" относится к любому направлению, параллельному третьему направлению Z.
На фигуре изображен летательный аппарат 1, содержащий фюзеляж 2.
Этот фюзеляж 2 проходит продольно от носа 3 к хвостовой части 4 вдоль переднезадней плоскости симметрии Р поперечно от первой боковой стороны 5 ко второй боковой стороне 6 и вверх от нижней части 7 к верхней части 8.
Кроме того, летательный аппарат содержит вращающуюся несущую поверхность 15 вертикально над верхней частью 8 фюзеляжа, эта вращающаяся несущая поверхность содержит, по меньшей мере, несущий винт 16.
Летательный аппарат снабжен, кроме того, хвостовым винтом 35, установленным на хвостовой части 4. Хвостовой винт 35 осуществляет вращательное движение вокруг поперечной оси АХ, в частности, для противодействия вращательному моменту несущего винта 16, оказываемому на фюзеляж 2, а также для контроля по рысканию летательного аппарата.
Кроме того, летательный аппарат содержит крыло 20, это крыло выполнено из двух полукрыльев 21, 22, проходящих с одной и другой стороны фюзеляжа, например, в поперечном направлении.
Каждое полукрыло 21, 22 несет тяговый воздушный винт 30, при этом первое полукрыло 21 несет первый воздушный винт 31, а второе полукрыло 22 несет второй воздушный винт 32.
Таким образом, каждое полукрыло 21, 22 содержит поперечно и последовательно от фюзеляжа 2 зону места стыка 23, промежуточную зону 24, несущую воздушный винт 30 и, например, гондолу воздушного винта и концевую зону 25.
Концевая зона 25 по выбору может быть связана с промежуточной зоной 24 шарнирным соединением 26. Это шарнирное соединение может контролироваться двигателем 27 для маневрирования концевой зоной 25 для направления, по требованию, в сторону земли при висении.
В полученном сложенном положении поверхность крыла, обдуваемая вращающейся несущей поверхностью, минимизирована. Отсюда следует, что отрицательная подъемная сила крыла минимизирована при висении.
Понятно, что концевая зона может представлять собой часть полукрыла, идущую от свободного конца крыла к гондоле воздушного винта.
Для обеспечения вращения вращающейся несущей поверхности хвостового винта и воздушных винтов летательный аппарат снабжен двигательной установкой 10. В соответствии с представленным примером эта установка может содержать несколько двигателей, в данном случае - два двигателя 11, 12.
Двигательная установка 10 осуществляет, таким образом, вращение вращающейся несущей поверхности, хвостового винта и воздушных винтов при постоянной работе системы 40 трансмиссии мощности.
Например, эта система 40 трансмиссии мощности содержит центральную часть 41, приводимую в действие двигательной установкой 10.
Эта центральная часть 41 связана, таким образом, с хвостовым винтом задним валом трансмиссии, выходящим в хвостовой редуктор 44'.
Кроме того, центральная часть 41 может содержать стойку, приводящую в действие втулку несущего винта 16.
Вращающаяся несущая поверхность и хвостовой винт, таким образом, постоянно приводятся в действие двигательной установкой.
Кроме того, система трансмиссии может содержать боковую часть 45 для воздушного винта 30, идущую от центральной части к воздушному винту. Таким образом, представленная система трансмиссии включает в себя первую боковую часть 42, идущую из центральной части к первому воздушному винту 31, и вторую боковую часть 43, идущую из этой центральной части 41 ко второму воздушному винту 32.
Понятно, что система трансмиссии может быть выполнена любым образом без выхода за рамки изобретения. Во всяком случае следует предусмотреть одну боковую часть на воздушный винт, центральную часть, приводящую во вращение вращающуюся несущую поверхность, и часть, приводящую в действие хвостовой винт.
Дифференциальный механизм 50, таким образом, установлен между каждой боковой частью и каждым воздушным винтом для того, чтобы, с одной стороны, обеспечить приведение в действие воздушного винта с помощью соответствующей боковой части в определенных режимах полета и, с другой стороны, помешать приведению в действие воздушного винта соответствующей боковой частью в других режимах полета. Каждый дифференциальный механизм 50 может быть расположен в гондоле соответствующего воздушного винта.
Первый дифференциальный механизм 50' расположен, таким образом, между первой боковой частью 42 и первым воздушным винтом 31, второй дифференциальный механизм 50" расположен между второй боковой частью 43 и вторым воздушным винтом 32.
Следует отметить, что узел, содержащий полукрылья 21, 22, а также воздушные винты 30, боковые части 45 и дифференциальные механизмы 50, может быть выполнен съемным.
Дифференциальные механизмы позволяют по требованию приводить в действие, в частности, каждый воздушный винт 30 в крейсерском полете и не приводить в действие воздушный винт 30, в частности, на земле.
Возможно также не приводить в действие оба воздушных винта 30 при висении или приводить в действие только один воздушный винт 30 при висении.
Следовательно, летательный аппарат может, в частности, работать в четырех следующих режимах:
- в соответствии с первым режимом работы, называемым "крейсерским режимом", вращающаяся несущая поверхность, хвостовой винт и воздушные винты приводятся в действие двигательной установкой в крейсерском полете,
- в соответствии со вторым режимом работы, называемым "режимом на земле", вращающаяся несущая поверхность и хвостовой винт приводятся в действие двигательной установкой на земле, а оба воздушных винта остановлены,
- в соответствии с третьим режимом работы, называемым "режимом висения", двигательная установка приводит в действие при висении вращающуюся несущую поверхность и хвостовой винт, а воздушные винты остановлены,
- в соответствии с четвертым режимом работы, называемым "вспомогательным режимом висения", двигательная установка приводит в действие при висении вращающаяся несущая поверхность, хвостовой винт и один воздушный винт, а другой воздушный винт остановлен.
Для этого каждый дифференциальный механизм 50 содержит входную шестерню 51, которая входит в зацепление с соответствующей шестерней боковой части 45.
Эта входная шестерня 51 соединена с полой оболочкой 52, при этом полая оболочка несет сателлитное зубчатое колесо 54 при помощи оси крепления 53.
Входная шестерня 51 и оболочка 52, таким образом, соединены во вращении вокруг продольной оси симметрии АХ1 входной шестерни 51. Напротив, сателлитное зубчатое колесо 54 может совершать вращательное движение относительно оболочки 52 вокруг направления АХ2.
Кроме того, дифференциальный механизм 50 снабжен валом холостого хода 55, проходящим вдоль продольной оси симметрии АХ1. Вал холостого хода 55 проходит, таким образом, через входную шестерню.
Напротив, вал холостого хода не соединен во вращении с входной шестерней 51, при этом между валом холостого хода и входной шестерней расположено средство качения.
Первый конец вала холостого хода, выступающий внутрь оболочки 52, жестко соединен с входным планетарным коническим зубчатым колесом 56 в зацеплении с коническим сателлитным зубчатым колесом 54.
Напротив, второй конец вала холостого хода взаимодействует с входным тормозом 65. Этот входной тормоз 65 может содержать зажим, предназначенный для сжатия выступа 55' вала холостого хода по требованию средства управления 70.
Кроме того, дифференциальный механизм содержит вал 58 воздушного винта, проходящий вдоль продольной оси симметрии АХ1. Первая конечная часть вала 58 воздушного винта проходит через оболочку 52. Отметим, что вал 58 воздушного винта не соединен во вращении с оболочкой 52 вокруг продольной оси симметрии АХ1 с помощью средства качения, размещенного, например, между оболочкой 52 и валом 58 воздушного винта.
Эта первая конечная часть вала 58 воздушного винта, таким образом, жестко соединена с выходным коническим планетарным зубчатым колесом 57 в зацеплении с коническим сателлитным зубчатым колесом 54. Выходное планетарное зубчатое колесо 57, таким образом, параллельно входному планетарному зубчатому колесу 56.
Второй конец вала 58 воздушного винта взаимодействует с тормозом 60 воздушного винта. Этот тормоз 60 воздушного винта может содержать зажим, способный сжимать выступ 58' вала 58 воздушного винта по требованию средства управления 70.
Следовательно, когда пилот манипулирует средством управления для остановки вращения воздушного винта 30, средство управления 70 делает неподвижным вал 58 воздушного винта с помощью тормоза 60 воздушного винта, который делает неподвижным выступ 58' вала 58 воздушного винта.
Параллельно средство управления 70 не затормаживает вал 55 холостого хода с помощью входного тормоза 65, причем этот входной тормоз не делает неподвижным выступ 55' вала 55 холостого хода.
Следовательно, боковая часть приводит во вращение входную шестерню 51 вокруг продольной оси симметрии АХ1. Эта входная шестерня приводит во вращение вокруг продольной оси симметрии АХ1 оболочку 52 и сателлитное зубчатое колесо 54.
Сателлитное зубчатое колесо 54, таким образом, приводит во вращение входное планетарное зубчатое колесо 56 и, следовательно, вал холостого хода.
Таким образом, мощность, потребляемая валом холостого хода, незначительна.
Однако следует отметить, что вал 55 холостого хода может входить в зацепление с коробкой привода агрегатов 75 и/или быть связанным с системой 80 накопления кинетической энергии.
Напротив, когда пилот манипулирует средством управления 70 для привода во вращение воздушного винта 30, средство управления 70 делает неподвижным вал 55 холостого хода с помощью входного тормоза 65, причем этот входной тормоз делает неподвижным выступ 55' вала 55 холостого входа.
Параллельно средство управления 70 не затормаживает вал 58 воздушного винта посредством тормоза 60 воздушного винта, этот тормоз воздушного винта не делает неподвижным выступ 58' вала 58 воздушного винта.
Следовательно, боковая часть приводит во вращение входную шестерню 51 вокруг продольной оси симметрии АХ1. Эта входная шестерня приводит во вращение оболочку 52 и сателлитное зубчатое колесо 54 вокруг продольной оси симметрии АХ1.
Сателлитное зубчатое колесо 54, таким образом, приводит во вращение выходное планетарное зубчатое колесо 57 и, таким образом, вал 58 воздушного винта.
Естественно, настоящее изобретение при внедрении может явиться предметом многочисленных вариаций. Хотя было описано несколько вариантов осуществления, хорошо понятно, что не является возможным идентифицировать исчерпывающим образом все мыслимые варианты. Разумеется, представляется возможным заменить описанное средство эквивалентным средством без выхода за рамки настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| ВЫСОКОСКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С БОЛЬШОЙ ДАЛЬНОСТЬЮ ПОЛЕТА | 2012 |
|
RU2520843C2 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
Изобретение относится к области авиации, в частности к конструкциям комбинированных летательных аппаратов. Летательный аппарат (1) содержит фюзеляж (2), двигательную установку (10), вращающуюся несущую поверхность (15), снабженную, по меньшей мере, одним несущим винтом (16), крыло (20), содержащее два полукрыла (21, 22), простирающиеся с одной и другой стороны фюзеляжа (2), два тяговых воздушных винта (30), расположенные с одной и другой стороны фюзеляжа и размещенные каждый на полукрыле (21, 22). Летальный аппарат (1) также содержит хвостовой винт (35) для компенсации реактивного момента и контроля по рысканию. Система (40) трансмиссии связывает двигательную установку (10) с каждым несущим винтом (16), хвостовым винтом (35) и каждым воздушным винтом (30) посредством дифференциального механизма (50), управляемым так, чтобы каждый воздушный винт (30) мог быть приведен во вращение в крейсерском полете и не мог быть приведен во вращение двигательной установкой (10) на земле и при висении. Достигается улучшение управляемости летательным аппаратом в режиме висения и повышается безопасность обслуживающего персонала и пассажиров летательного аппарата на земле. 5 з.п. ф-лы, 1 ил.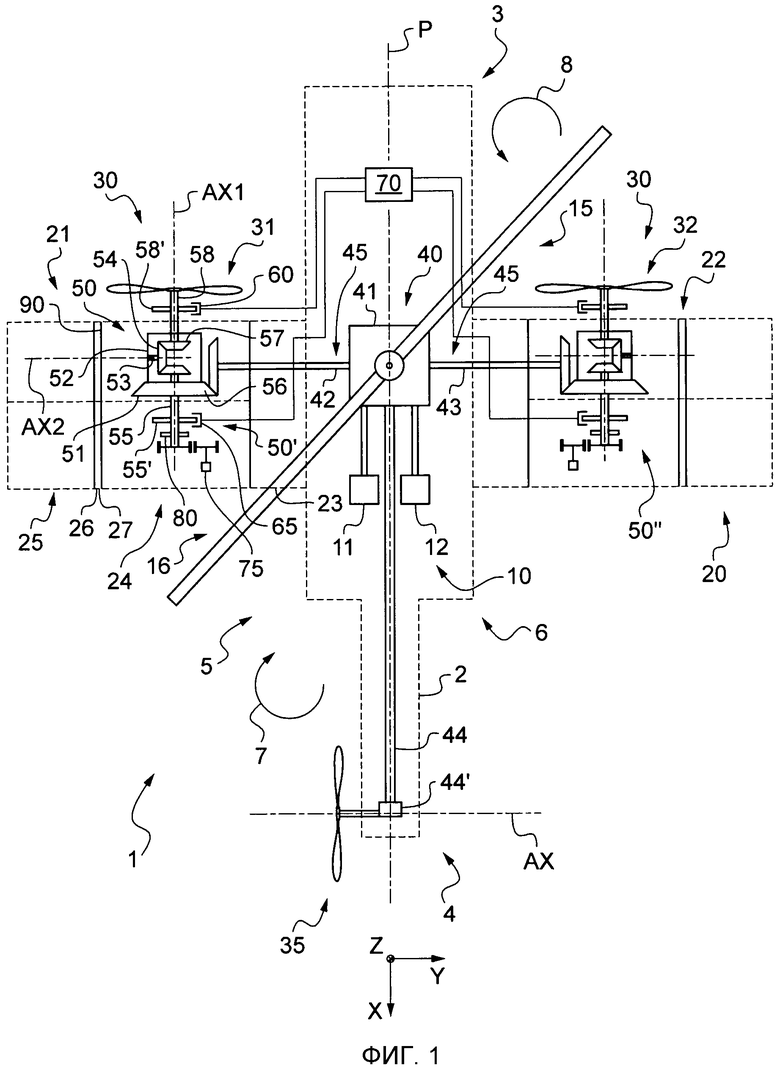
1. Летательный аппарат (1), содержащий фюзеляж (2), двигательную установку (10), вращающуюся несущую поверхность (15), снабженную, по меньшей мере, одним несущим винтом (16), обеспечивающим, по меньшей мере, частично, подъемную силу летательного аппарата (1), крыло (20), обеспечивающее, по меньшей мере, частично, подъемную силу летательного аппарата (1) в крейсерском полете, при этом упомянутое крыло (20) содержит два полукрыла (21, 22), проходящие с одной и другой стороны фюзеляжа (2), причем упомянутый летательный аппарат содержит, по меньшей мере, два тяговых воздушных винта (30), расположенные с одной и другой стороны фюзеляжа (2) и размещенные каждый на полукрыле (21, 22), при этом летательный аппарат (1) содержит хвостовой винт (35) для компенсации реактивного момента и контроля по рысканию, отличающийся тем, что он содержит систему (40) трансмиссии, связывающую двигательную установку (10) с каждым несущим винтом (16) и с хвостовым винтом (35) для постоянного привода каждого несущего винта (16) и хвостового винта (35), при этом система (40) трансмиссии связывает двигательную установку (10) с каждым воздушным винтом (30) посредством дифференциального механизма (50), контролируемого по требованию, чтобы каждый воздушный винт мог быть приведен в действие в крейсерском полете и мог не приводиться во вращение двигательной установкой (10) на земле, при этом упомянутый дифференциальный механизм (50) отдельного воздушного винта (30) содержит:
- входную шестерню (51), приводимую двигательной установкой (10) через боковую часть (45) упомянутой системы (40) трансмиссии, при этом упомянутая входная шестерня (51) жестко соединена с оболочкой (52), несущей, по меньшей мере, одно сателлитное зубчатое колесо (54),
- вал (55) холостого хода, проходящий через упомянутую входную шестерню (51), при этом упомянутый вал (55) холостого хода жестко соединен во вращении с входным планетарным зубчатым колесом (56), зацепленным с сателлитным зубчатым колесом (54) и отсоединенным во вращении от упомянутой входной шестерни (51),
- вал (58) воздушного винта, приводящий в действие упомянутый отдельный воздушный винт (30), причем этот вал (58) воздушного винта жестко соединен во вращении с выходным планетарным зубчатым колесом (57), а это выходное планетарное зубчатое колесо (57) находится в зацеплении с сателлитным зубчатым колесом (54),
- тормоз (60) воздушного винта для торможения упомянутого вала (58) воздушного винта и входной тормоз (65) для торможения вала (55) холостого хода.
2. Летательный аппарат по п.1, отличающийся тем, что летательный аппарат содержит средство (70) контроля для:
- управления тормозом (60) воздушного винта для блокирования вала (58) воздушного винта и управления входным тормозом (60) для освобождения вала (55) холостого хода для выполнения функций остановки воздушного винта (30) путем привода вала (55) холостого хода боковой частью (45),
- управления тормозом (60) воздушного винта для освобождения вала (58) воздушного винта и управления входным тормозом (65) для блокирования вала холостого хода (55) для выполнения функции передачи вращающего движения от боковой части (45) к валу (58) воздушного винта для приведения во вращение этого воздушного винта (30).
3. Летательный аппарат по п.1, отличающийся тем, что упомянутый вал (55) холостого хода находится в зацеплении с коробкой (75) приводов агрегатов.
4. Летательный аппарат по п.1, отличающийся тем, что упомянутый вал (55) холостого хода связан с системой (80) накопления кинетической энергии.
5. Летательный аппарат по п.1, отличающийся тем, что упомянутая система (40) трансмиссии соединяет двигательную установку (10):
- с первым воздушным винтом (31) посредством первого дифференциального механизма (50'), контролируемого пилотом для того, чтобы этот первый воздушный винт (31) мог приводиться в действие двигательной установкой (10) в крейсерском полете и при висении и мог не приводиться во вращение двигательной установкой (10) на земле и при висении,
- со вторым воздушным винтом (32) посредством второго дифференциального механизма (50"), контролируемого пилотом для того, чтобы этот второй воздушный винт (32) мог приводиться в действие двигательной установкой (10) в крейсерском полете и при висении и мог не приводиться во вращение двигательной установкой (10) на земле и при висении.
6. Летательный аппарат по одному из пп.1-5, отличающийся тем, что каждое полукрыло (21, 22), проходит поперечно от упомянутого фюзеляжа (2) из зоны места стыка (23) к концевой зоне (25) через промежуточную зону (24), несущую воздушный винт (30), при этом упомянутая концевая зона (25) соединена с упомянутой промежуточной зоной (24) шарнирным соединением (26), контролируемым для того, чтобы упомянутой концевой зоной (25) можно было маневрировать для направления к земле при висении для уменьшения поверхности крыла, на которое воздействует воздух, проходящий через вращающуюся несущую поверхность, и для защиты воздушного винта от контакта с землей.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2212358C1 |
| US 20050151001 A1, 14.07.2005 | |||
| US 6974105 B2, 13.12.2005 | |||
| Применение переносного электроизмерительного прибора для определения качества рельсовых стыков и соединителей | 1952 |
|
SU94953A1 |
| Способ токарной обработки | 1979 |
|
SU895590A1 |

