Область техники, к которой относится изобретение
[3] Это изобретение относится к рабочим транспортным средствам и к дистанционным запускам рабочих транспортных средств.
Уровень техники
[4] В строительной, сельскохозяйственной, горнодобывающей и лесопромышленной отраслях эксплуатируется множество различных типов рабочих транспортных средств, чтобы выполнять различные задачи на местах выполнения работ. Места выполнения работ могут находиться в относительно удаленных местоположениях и/или в сложных климатических условиях. В некоторых случаях запуск рабочего транспортного средства в начале рабочей смены может приводить к задержкам, например, чтобы правильно прогреть рабочее транспортное средство. Будет полезно, если этих задержек можно будет избегать.
Сущность изобретения
[5] Изобретение относится к системе и способу для приведения в действие рабочего транспортного средства с помощью дистанционного запуска.
[6] В одном аспекте изобретение относится к системе дистанционного запуска для рабочего транспортного средства. Система дистанционного запуска включает в себя блок связи, выполненный с возможностью принимать входной сигнал дистанционного запуска; один или более оптических датчиков, предоставляющих, по меньшей мере, первое изображение, по меньшей мере, части рабочего транспортного средства или окружения рабочего транспортного средства; и контроллер, с архитектурой памяти и обработки для выполнения алгоритмов управления транспортным средством, связанный с блоком связи и одним или более оптическими датчиками. Контроллер включает в себя, по меньшей мере, модуль запуска и модуль верификации. Модуль запуска выполнен с возможностью формировать запрос верификации в ответ на входной сигнал дистанционного запуска. В ответ на запрос верификации модуль верификации выполнен с возможностью подтверждать, что первое изображение удовлетворяет условию верификации, и формировать подтверждение верификации, когда первое изображение удовлетворяет условию верификации. Модуль запуска выполнен с возможностью формировать команду запуска в ответ на подтверждение верификации. Система дистанционного запуска дополнительно включает в себя пусковое устройство, соединенное с контроллером и выполненное с возможностью активировать первичный двигатель рабочего транспортного средства при приеме команды запуска от контроллера.
[7] В другом аспекте изобретение относится к способу дистанционного запуска для рабочего транспортного средства. Способ дистанционного запуска включает в себя прием, посредством блока связи, входного сигнала дистанционного запуска; захват, посредством оптического датчика, изображения, которое включает в себя, по меньшей мере, часть рабочего транспортного средства или окружение рабочего транспортного средства; подтверждение, посредством контроллера, что изображение удовлетворяет условию верификации, в ответ на входной сигнал дистанционного запуска; формирование, посредством контроллера, команды запуска, когда изображение удовлетворяет условию верификации; и активация, посредством пускового устройства, первичного двигателя рабочего транспортного средства в ответ на команду запуска.
[8] Детали одного или более вариантов осуществления изложены в сопровождающих чертежах и описании ниже. Другие признаки и преимущества станут понятны из описания, чертежей и формулы изобретения.
Краткое описание чертежей
[9] Фиг. 1 - это схематичный вид окружения, в котором раскрытая система и способ дистанционного запуска могут быть связаны;
[10] Фиг. 2 - это схематичный вид примерного рабочего транспортного средства в форме автомобиля-самосвала, в котором система и способ дистанционного запуска могут быть реализованы;
[11] Фиг. 3 - это схематичная блок-схема, иллюстрирующая примерную систему запуска транспортного средства;
[12] Фиг. 4 - это подробная схематичная блок-схема примерной системы запуска транспортного средства на фиг. 3 для реализации автоматического дистанционного запуска рабочего транспортного средства;
[13] Фиг. 5 - это подробная схематичная блок-схема примерной системы запуска транспортного средства на фиг. 3 для реализации автоматического дистанционного запуска рабочего транспортного средства в холодных температурных условиях;
[14] Фиг. 6 - это подробная схематичная блок-схема примерной системы запуска транспортного средства на фиг. 3 для реализации верификации инициированного дистанционного запуска рабочего транспортного средства;
[15] Фиг. 7 - это схематичное представление отображения интерфейса верификации примерной системы запуска транспортного средства на фиг. 3;
[16] Фиг. 8 - это дополнительное схематичное представление отображения интерфейса верификации примерной системы запуска транспортного средства на фиг. 3; и
[17] Фиг. 9 - это блок-схема последовательности операций, иллюстрирующая примерный способ запуска транспортного средства раскрытой системы на фиг. 3 в соответствии с одним из различных вариантов осуществления.
[18] Аналогичные ссылочные символы на различных чертежах указывают аналогичные элементы.
Подробное описание изобретения
[19] Последующее описание описывает один или более примерных вариантов осуществления раскрытой системы и способа, как показано на сопровождающих изображениях чертежей, описанных кратко выше. Различные модификации в примерных вариантах осуществления могут быть рассмотрены специалистом в области техники.
[20] Последующее описание описывает одну или более примерных реализаций раскрытых систем и способов дистанционного запуска для приведения в действие рабочего транспортного средства, как показано на сопровождающих изображениях чертежей, описанных кратко выше. В целом, раскрытые системы и способы (и рабочие транспортные средства, в которых они могут быть реализованы) обеспечивают улучшенную эффективность, эксплуатацию и безопасность по сравнению с обычными системами.
Обзор окружения рабочего транспортного средства
[21] Фиг. 1 - это примерное окружение 100, в котором система и способ запуска транспортного средства могут быть реализованы. В частности, система 110 запуска транспортного средства изображается на фиг. 1 как связанная с рабочим транспортным средством 120, хотя одна или более функций системы 110 запуска транспортного средства могут быть выполнены посредством, или иначе взаимодействовать с, других элементов окружения 100. В некоторых примерах система 110 запуска транспортного средства (или "система запуска") может считаться системой дистанционного запуска, в которой аспекты или вся операция запуска могут происходить, когда водитель транспортного средства не находится в транспортном средстве 120.
[22] Как описано более подробно ниже, система 110 запуска может взаимодействовать с одним или более дополнительными рабочими транспортными средствами 122, 124, устройством 130 дистанционного управления и удаленным центром 140, чтобы обеспечивать эксплуатацию. Опять же, хотя изображена в рабочем транспортном средстве 120, в различных вариантах осуществления система 110 запуска может быть встроена в другие рабочие транспортные средства 122, 124, устройство 130 дистанционного управления или удаленный центр 140; в более чем одно из рабочих транспортных средств 120, 122, 124, устройство 130 дистанционного управления или удаленный центр 140 (например, как распределенная система); или как автономная система.
[23] В целом, другие рабочие транспортные средства 122, 124 могут рассматриваться в контексте системы 110 запуска как взаимодействующие рабочие транспортные средства 122, 124 или как часть парка рабочих транспортных средств с рабочим транспортным средством 120. Устройство 130 дистанционного управления может быть использовано будущим водителем рабочего транспортного средства 120, чтобы дистанционно запускать и/или верифицировать дистанционный запуск рабочего транспортного средства 120. Удаленный центр 140 может быть использован диспетчером парка рабочих транспортных средств 120, 122, 124, чтобы дистанционно запускать или верифицировать дистанционный запуск рабочего транспортного средства 120 от имени будущего водителя. По существу, устройство 130 дистанционного управления обсуждается ниже со ссылкой на водителя, а удаленный центр 140 обсуждается ниже со ссылкой на диспетчера, хотя в других вариантах осуществления диспетчер может использовать устройство 130 дистанционного управления, а водитель может использовать удаленный центр 140.
[24] Элементы окружения 100 могут беспроводным образом связываться друг с другом любым подходящим образом, включающим в себя непосредственную связь (например, через Bluetooth, радиочастотные сигналы или т.п.) или через сеть 102. Например, сеть 102 связи может использовать одну или более из различных технологий или механизмов связи, включающих в себя радиочастотную, Wi-Fi, сотовую или т.п. Дополнительные подробности о стандартах связи предоставляются ниже. Сеть 102 может включать в себя или иначе взаимодействовать с системой JDLink™, коммерчески доступной от компании Deere & Company из Молина, штат Иллинойс.
[25] Рабочее транспортное средство 120 может быть любым типом рабочего транспортного средства, включающим в себя самосвал с шарнирно сочлененной рамой, описанный более подробно со ссылкой на фиг. 2. В других прикладных задачах также возможны другие конфигурации. Например, рабочие транспортные средства в некоторых вариантах осуществления могут быть выполнены как тягачи или погрузчики, грейдеры или аналогичные транспортные средства. Дополнительно, рабочие транспортные средства могут быть выполнены как машины, отличные от строительных машин, включающие в себя транспортные средства из сельскохозяйственной, лесопромышленной и горнодобывающей отраслей, такие как тракторы, комбайны, уборочные машины, трелевочные лебедки, подвесные установки, валочно-пакетирующие машины и т.п.
[26] Как представлено выше, рабочее транспортное средство 120 может быть частью парка с другими транспортными средствами 122, 124, два из которых показаны на фиг. 1 в качестве примеров. Рабочие транспортные средства 122, 124 могут иметь отдельные системы запуска, аналогичные системе 110 запуска, описанной ниже, и/или могут взаимодействовать с системой 110 запуска, связанной с рабочим транспортным средством 120. Парк рабочих транспортных средств 120, 122, 124 может быть любым типом рабочих транспортных средств, включающих в себя одинаковый тип или различные типы рабочих транспортных средств. Дополнительные детали будут предоставлены ниже.
[27] Система 110 запуска может взаимодействовать с устройством 130 дистанционного управления. Обычно, устройство 130 дистанционного управления связывается с будущим водителем рабочего транспортного средства 120 в местоположении, удаленном от рабочего транспортного средства 120. Хотя не показано подробно, устройство 130 дистанционного управления может быть любым типом электронного устройства, связывающегося с системой 110 запуска, таким как планшетное вычислительное устройство, мобильный или интеллектуальный сотовый телефон, персональный цифровой помощник, портативное вычислительное устройство и т.д. В некоторых случаях устройство 130 дистанционного управления может быть стационарным устройством, таким как терминал. В дополнительных примерах устройство 130 дистанционного управления может быть включено или иначе располагаться в удаленном центре 140, обсуждаемом ниже.
[28] В одном примере устройство 130 дистанционного управления включает в себя контроллер 132 устройства, пользовательский интерфейс 134 устройства и компонент 136 связи устройства. Контроллер 132 устройства может быть выполнен как вычислительное устройство с связанными архитектурами процессорных устройств и памяти, в качестве реализованной аппаратным образом вычислительной схемы (или схем), в качестве программируемой схемы или иначе. В некоторых примерах контроллер 132 устройства может быть реализован в мобильном приложении, исполняемом посредством мобильного устройства. Контроллер 132 устройства находится на связи с пользовательским интерфейсом 134 устройства и компонентом 136 связи устройства посредством подходящей архитектуры межсоединения или компоновки, которая обеспечивает передачу данных, команд, питания и т.д. В некоторых примерах контроллер 132 устройства может хранить уникальный идентификатор, связанный с устройством 130 дистанционного управления и, таким образом, водителем.
[29] Пользовательский интерфейс 134 устройства предоставляет возможность водителю или другому пользователю взаимодействовать с устройством 130 дистанционного управления (например, вводить команды и данные) и, таким образом, другими аспектами окружения 100. В одном примере пользовательский интерфейс 134 устройства включает в себя устройство ввода и дисплей. Устройство ввода является любым подходящим устройством, способным принимать пользовательские входные данные, включающим в себя, но не только, клавиатуру, микрофон, слой сенсорного экрана, связанный с дисплеем, или другим подходящим устройством, чтобы принимать данные и/или команды от пользователя. Множество устройств ввода могут также быть использованы. Дисплей содержит любую подходящую технологию для отображения информации, включающую в себя, но не только, жидкокристаллический дисплей (LCD), дисплей на светоизлучающих диодах (LED), дисплей на органических светоизлучающих диодах (OLED), плазму или катодно-лучевую трубку (CRT). В некоторых вариантах осуществления пользовательский интерфейс 134 устройства может включать в себя устройства вывода в дополнение к дисплею, включающие в себя динамики и тактильные исполнительные устройства.
[30] Компонент 136 связи устройства содержит любую подходящую систему для приема данных от и передачи данных к рабочему транспортному средству 120, удаленному центру 140 и системе 110 запуска. Например, компонент 136 связи устройства может включать в себя радио или подходящий приемник, выполненный с возможностью принимать данные, передаваемые посредством модуляции радиочастотного (RF) сигнала через сотовую телефонную сеть согласно стандарту долгосрочного развития (LTE), хотя другие технологии могут быть использованы. Например, компонент 136 связи устройства может осуществлять двухсторонние передачи данных с рабочим транспортным средством 120, удаленным центром 140 и/или системой 110 запуска через Bluetooth® или с помощью стандарта Wi-Fi, т.е., одного или более из стандартов 802.11, которые определены Институтом инженеров по электротехнике и электронике ("IEEE"), как хорошо известно специалистам в области техники. Таким образом, компонент 136 связи устройства может включать в себя Bluetooth®-приемопередатчик, радио-приемопередатчик, сотовый приемопередатчик, LTE-приемопередатчик и/или Wi-Fi-приемопередатчик. Компонент 136 связи устройства может использовать различные протоколы и технологии безопасности, чтобы гарантировать, что надлежащим образом безопасная связь имеет место между устройством 130 дистанционного управления и рабочим транспортным средством 120, удаленным центром 140 и/или системой 110 запуска.
[31] Как описано ниже, устройство 130 дистанционного управления, в целом, выполнено с возможностью предоставлять возможность водителю включать и отключать функцию автозапуска системы 110 запуска. В некоторых вариантах осуществления устройство 130 дистанционного управления дополнительно предоставляет возможность водителю инициировать дистанционный запуск и/или подтверждать, что дистанционный запуск является надлежащим, и, таким образом, одобрять или отвергать инициированный дистанционный запуск.
[32] Как представлено выше, система 110 запуска может дополнительно взаимодействовать с удаленным центром 140 или, в некоторых вариантах осуществления, быть реализована в удаленном центре 140. Альтернативно, удаленный центр 140 может быть исключен.
[33] В целом, удаленный центр 140 включает в себя удаленный компонент 142 связи, контроллер 144 удаленного центра и одно или более удаленных устройств 146 хранения данных. Удаленный компонент 142 связи содержит любую подходящую систему для приема данных от и передачи данных к рабочим транспортным средствам 120, 122, 124, устройству 130 дистанционного управления и системе 110 запуска, включающую в себя те, которые описаны выше со ссылкой на компонент 136 связи устройства. Например, удаленный компонент 142 связи может осуществлять двухсторонние передачи данных с рабочими транспортными средствами 120, 122, 124, устройством 130 дистанционного управления и системой 110 запуска через Bluetooth®, спутниковую связь или с помощью Wi-Fi-стандарта, т.е., одного или более из стандартов 802.11. Удаленный компонент 142 связи может применять различные протоколы и технологии безопасности, чтобы гарантировать, что надлежащим образом безопасная связь имеет место между удаленным центром 140 и рабочими транспортными средствами 120, 122, 124, устройством 130 дистанционного управления и/или системой 110 запуска.
[34] Контроллер 144 удаленного центра находится на связи с удаленным компонентом 142 связи и одним или более удаленными устройствами 146 хранения данных посредством подходящей структуры взаимосвязи или компоновки, которая обеспечивает передачу данных, команд, питания и т.д. Контроллер 144 удаленного центра может также быть на связи с одним или более удаленными пользователями через портал, такой как веб-портал. Контроллер 144 удаленного центра может быть выполнен как вычислительное устройство с связанными архитектурами процессорных устройств и памяти, в качестве реализованной аппаратным образом вычислительной схемы (или схем), в качестве программируемой схемы или иначе.
[35] Как отмечено выше, в одном варианте осуществления, удаленный центр 140 может реализовывать один или более аспектов системы 110 запуска, описанной ниже, включающих в себя предоставление запрошенных или желательных данных для выполнения связанных функций. В дополнительных вариантах осуществления удаленный центр 140 принимает и хранит данные от рабочих транспортных средств 120, 122, 124, устройства 130 дистанционного управления и системы 110 запуска, а также от аналогичных машин, устройств и систем со всего парка или трудового коллектива. Дополнительно, удаленный центр 140, в целом, выполнено с возможностью предоставлять возможность диспетчеру включать и отключать функцию автозапуска системы 110 запуска. В некоторых вариантах осуществления удаленный центр 140 дополнительно предоставляет возможность диспетчеру инициировать дистанционный запуск и/или верифицировать, что дистанционный запуск является надлежащим, и, таким образом, одобрять или отвергать инициированный дистанционный запуск.
Обзор примерного рабочего транспортного средства
[36] Как отмечено выше, и теперь обращаясь к фиг. 2, система 110 запуска может быть использована относительно различных мобильных рабочих транспортных средств и других типов мобильных машин, включающих в себя изображенное рабочее транспортное средство 120 в виде самосвала с шарнирно сочлененной рамой на фиг. 2. Рабочее транспортное средство 120 описывается ниже, чтобы предоставлять примеры различных типов машинных элементов, которые могут взаимодействовать с системой 110 запуска и описываются просто в качестве образца для более подробных обсуждений ниже. Временами, окружение 100 на фиг. 1 также упоминается в обсуждении ниже.
[37] В одном примере рабочее транспортное средство 120 включает в себя контроллер 200 (или множество контроллеров), чтобы управлять различными аспектами эксплуатации рабочего транспортного средства 120. Как описано более подробно ниже, один или более аспектов системы 110 запуска могут быть включены в контроллер 200.
[38] В целом, контроллер 200 (или другие) может быть выполнен как вычислительное устройство с связанными архитектурами процессорных устройств и памяти, как реализованная аппаратным образом вычислительная схема (или схемы), как программируемая схема, как гидравлический, электрический или электро-гидравлический контроллер или иначе. По существу, контроллер 200 может быть выполнен с возможностью исполнять различную вычислительную и управляющую функциональность относительно рабочего транспортного средства 120 (или другого машинного оборудования). В некоторых вариантах осуществления контроллер 200 может быть выполнен с возможностью принимать входные сигналы в различных форматах (например, как гидравлические сигналы, сигналы напряжения, сигналы тока и т.п.) и выводить командные сигналы в различных форматах (например, как гидравлические сигналы, сигналы напряжения, сигналы тока, механические движения и т.п.). В некоторых вариантах осуществления контроллер 200 (или его часть) может быть выполнен как узел гидравлических компонентов (например, клапанов, поточных линий, поршней и цилиндров и т.п.), так что управление различными устройствами (например, насосами или моторами) может быть выполнено с помощью, и на основе, гидравлических, механических или других сигналов и движений.
[39] Контроллер 200 может находиться в электронной, гидравлической, механической или другой связи с различными другими системами или устройствами рабочего транспортного средства 120 (или другого машинного оборудования). Например, контроллер 200 может находиться в электронной или гидравлической связи с различными исполнительными устройствами, датчиками и другими устройствами внутри (или снаружи) рабочего транспортного средства 120, включающими в себя различные устройства, описанные ниже. Контроллер 200 может связываться с другими системами или устройствами (включающими в себя другие контроллеры) различными известными способами, включающими в себя связь через CAN-шину (не показана) рабочего транспортного средства 120, через средство беспроводной или гидравлической связи, или иначе. Примерное местоположение для контроллера 200 изображается на фиг. 2. Будет понятно, однако, что возможны другие местоположения, включающие в себя другие местоположения в рабочем транспортном средстве 120, или различные удаленные местоположения.
[40] В некоторых вариантах осуществления контроллер 200 может быть выполнен с возможностью принимать входные команды и взаимодействовать с водителем через интерфейс 210 "человек-транспортное средство", который может быть расположен внутри кабины 220 рабочего транспортного средства 120 для легкого доступа водителя. Интерфейс 210 "человек-транспортное средство" может быть выполнен множеством способов. В некоторых вариантах осуществления интерфейс 210 "человек-транспортное средство" может включать в себя устройство 212 ввода с одним или более джойстиками, различными переключателями или рычагами, одной или более кнопками, интерфейсом сенсорного экрана, который может быть наложен на дисплей 214, клавиатурой, динамиком, микрофоном, связанным с системой распознавания речи, или различные другие устройства интерфейса "человек-транспортное средство". Интерфейс 210 "человек-транспортное средство" также включает в себя дисплей 214, который может быть реализован как плоскопанельный дисплей или другой тип дисплея, который объединяется с инструментальной панелью или консолью рабочего транспортного средства 120. Специалисты в области техники могут реализовать другие технологии, чтобы реализовать дисплей 214 в рабочем транспортном средстве 120.
[41] Рабочее транспортное средство 120 дополнительно включает в себя компонент 216 связи транспортного средства. Компонент 216 связи транспортного средства предоставляет возможность связи между контроллером 200 и устройством 130 дистанционного управления, удаленным центром 140 и/или системой 110 запуска. Компонент 216 связи транспортного средства содержит любую подходящую систему для приема данных от и передачи данных к устройству 130 дистанционного управления, удаленному центру 140 и/или системе 110 запуска, включающую в себя такую, которая описана выше со ссылкой на компонент 136 связи устройства. В одном примере компонент 216 связи транспортного средства осуществляет двухсторонние передачи данных с устройством 130 дистанционного управления, удаленным центром 140 и/или системой 110 запуска через Bluetooth®, спутниковую связь или с помощью стандарта Wi-Fi, т.е., одного или более из стандартов 802.11. Компонент 216 связи транспортного средства может использовать различные протоколы и технологии безопасности, чтобы гарантировать, что надлежащим образом безопасная связь имеет место между рабочим транспортным средством 120 и устройством 130 дистанционного управления, удаленным центром 140 и/или системой 110 запуска.
[42] Как описано более подробно ниже, контроллер 200 может обеспечивать сбор различных типов данных транспортного средства, связанных с рабочим транспортным средством 120, которые должны быть оценены системой 110 запуска. Данные транспортного средства могут быть в форме исходных данных от применимых датчиков, описанных ниже (или других источников), или подвергнутых некоторой обработке в контроллере 200 для того, чтобы извлекать желаемые характеристики. Дополнительно, контроллер 200 может принимать и реализовывать команды от системы 110 запуска, устройства 130 дистанционного управления и удаленного центра 140. Дополнительные детали будут предоставлены ниже.
[43] Как представлено выше, рабочее транспортное средство 120 включает в себя кабину 220, установленную на раму 230 транспортного средства. Кабина 220, в целом, функционирует, чтобы размещать водителя и интерфейс 210 "человек-транспортное средство" во время эксплуатации рабочего транспортного средства 120.
[44] В этом примере рабочее транспортное средство 120 дополнительно включает в себя рабочий инструмент, такой как грузовой бункер 232, установленный на раму 230 транспортного средства. Будет понятно, что конфигурация рабочего транспортного средства 120, имеющего рабочий инструмент, такой как грузовой бункер 232, представлена только в качестве примера. Грузовой бункер 232 определяет хранилище, чтобы принимать полезный груз. Один или более гидравлических цилиндров 234 устанавливаются на раму 230 и грузовой бункер 232, так что гидравлические цилиндры 234 могут быть приведены в действие или активированы для того, чтобы поворачивать грузовой бункер 232 вокруг оси поворота. В других вариантах осуществления рабочие инструменты могут включать в себя лезвия, вилки, культиваторы и косилки, в качестве примеров.
[45] Рабочее транспортное средство 120 включает в себя источник хода, такой как двигатель 240, который подает мощность к трансмиссии 250. В одном примере двигатель 240 является двигателем внутреннего сгорания, таким как дизельный двигатель, который управляется посредством контроллера 200, который может включать в себя модуль управления двигателем, чтобы предоставлять возможность запуска двигателя 240, предоставлять возможность отключения двигателя 240, запрещать работу двигателя 240 и/или модифицировать некоторый аспект работы двигателя 240, или связанной системы, например, на основе входных данных, полученных из интерфейса 210 "человек-транспортное средство", а также на основе команд от системы 110 запуска. Следует отметить, что использование двигателя внутреннего сгорания является просто примером, поскольку двигательное устройство может быть топливным элементом, электромотором, гибридным газовым электромотором и т.д. Рабочее транспортное средство 120 может включать в себя датчик 308 топлива, выполненный с возможностью определять уровень топлива, доступного двигателю 240.
[46] Трансмиссия 250 передает мощность от двигателя 240 к надлежащему приводу на ведущие колеса, соединенному с одним или более ведущими колесами 252 (или другим типом тягового механизма) рабочего транспортного средства 120, чтобы предоставлять возможность рабочему транспортному средству 120 двигаться. Как известно специалисту в области техники, трансмиссия 250 может включать в себя подходящую зубчатую передачу, работающую во множестве диапазонов, содержащих одну или более передач, включающих в себя, но не только, диапазон парковки, нейтральный диапазон, диапазон заднего хода, диапазон привода, пониженный диапазон и т.д. Трансмиссия 250 может включать в себя один или более датчиков 254, которые измеряют одну или более характеристик трансмиссии 250, таких как состояние, давление или уровень жидкости. Аналогично, колеса 252 могут включать в себя датчики 256 давления в шинах. В одном примере трансмиссия 250 управляется посредством контроллера 200, который может включать в себя модуль управления трансмиссией, чтобы предоставлять возможность включать или отключать движение рабочего транспортного средства 120, например, на основе входных данных, принятых от интерфейса 210 "человек-транспортное средство", а также на основе команд от системы 110 запуска.
[47] Рабочее транспортное средство 120 может включать в себя или иначе взаимодействовать с одним или более пусковыми устройствами 258. Пусковое устройство 258 может быть, например, электромеханическим устройством, таким как мотор, которое инициирует работу двигателя 240 внутреннего сгорания. Когда используется в данном документе, пусковое устройство 258 может ссылаться на любое устройство или компонент, который запускает какой-либо аспект рабочего транспортного средства 120.
[48] Рабочее транспортное средство 120 дополнительно включает в себя систему 242 смазки двигателя и/или систему 244 охлаждения двигателя, которые связано с двигателем 240 и/или другими частями рабочего транспортного средства 120. Система 242 смазки и система 244 охлаждения могут управляться согласно сигналам от контроллера 200.
[49] В целом, система 242 смазки двигателя осуществляет циркуляцию жидкой смазки (например, моторного масла) вокруг двигателя 240, чтобы смазывать различные движущиеся части (например, поршни, цилиндры, подшипники) двигателя 240. Хотя не показано подробно, система 242 смазки двигателя может включать в себя такие компоненты как резервуар для масла, маслосборник, поддон, трубопроводы и насосы, чтобы осуществлять циркуляцию смазки к и от двигателя 240 и других применимых частей. В одном примере система 242 смазки двигателя может включать в себя один или более датчиков 246, чтобы измерять одну или более характеристик системы смазки. В одном примере датчики 246 могут включать в себя датчик температуры, чтобы измерять температуру смазки в одном или более местах в системе 242 смазки двигателя. Другие датчики 246 могут включать в себя датчики давления жидкости, расхода или количества. В одном варианте осуществления контроллер 200 может принимать показатели температуры от одного или более датчиков 246 температуры и может управлять системой 242 смазки двигателя на основе показателей температуры.
[50] Аналогично, система 244 охлаждения двигателя осуществляет циркуляцию жидкого хладагента (например, гликоля, воды) вокруг двигателя 240 и других частей рабочего транспортного средства 120, по желанию, чтобы управлять температурой двигателя 240. В одном примере система 244 охлаждения двигателя может включать в себя один или более датчиков 248, включающих в себя датчики температуры, чтобы измерять температуру охлаждающей жидкости в одном или более местоположениях в системе 244 охлаждения двигателя. Могут быть предусмотрены другие датчики 248, включающие в себя такие датчики 246 как датчики давления жидкости, расхода или количества. В одном варианте осуществления контроллер 200 может принимать показатели температуры от одного или более датчиков 248 температуры и может управлять системой 244 охлаждения двигателя на основе показателей температуры.
[51] В некоторых вариантах осуществления двигатель 240 может включать в себя систему 260 обработки выхлопного газа, чтобы фильтровать и обрабатывать выхлопной газ от процесса сгорания, включая в себя восстановление загрязняющих веществ в более приемлемые формы. Система 260 обработки выхлопного газа может включать в себя различные компоненты, включающие в себя блок, который использует жидкость для очистки дизельных выхлопных газов (DEF). Система 260 обработки выхлопного газа может включать в себя один или более датчиков 262, таких как датчики температуры, расхода, давления или количества, чтобы собирать информацию, связанную с системой 260 обработки выхлопного газа.
[52] В дополнительных вариантах осуществления рабочее транспортное средство 120 включает в себя систему 264 рулевого управления с усилителем, чтобы помогать водителю в маневрировании рабочего транспортного средства 120. Датчик 266 системы рулевого управления с усилителем может быть предусмотрен, чтобы собирать информацию, связанную с системой 264 рулевого управления с усилителем.
[53] Рабочее транспортное средство 120 также включает в себя одну или более гидравлических систем 270 с насосами, которые могут приводиться в действие посредством двигателя 240 рабочего транспортного средства 120. Поток от насосов может быть направлен через различные управляющие клапаны и различные трубопроводы для того, чтобы приводить в действие гидравлические цилиндры, а также различные другие компоненты рабочего транспортного средства 120. Поток через гидравлическую систему 270 может управляться различными способами (например, через управление различными управляющими клапанами) согласно командам от контроллера 200 для того, чтобы вызывать перемещение гидравлических цилиндров и, таким образом, перемещение грузового бункера 232 (и/или других рабочих инструментов) относительно рамы 230 транспортного средства, например, на основе входных данных, принятых от интерфейса 210 "человек-транспортное средство", а также на основе команд от системы 110 запуска. Хотя не показано подробно, другие аспекты рабочего транспортного средства 120 могут управляться с помощью отдельных моторов и т.п. с помощью команд от контроллера 200 на основе входных данных от интерфейса 210 "человек-транспортное средство" и/или системы 110 запуска. Различные датчики 276 могут быть связаны с гидравлической системой 270. Датчики 276 могут быть датчиками ориентации, позиции и/или состояния, чтобы предоставлять данные о характеристиках инструмента.
[54] Рабочее транспортное средство 120 может также включать в себя один или более тормозных узлов 280, которые, при активации, останавливают один или более функциональных аспектов рабочего транспортного средства 120. В качестве примеров, тормозные узлы 182 могут включать в себя тормоз хода и/или стояночный тормоз, чтобы останавливать движение всего рабочего транспортного средства 120, и/или тормоз оборудования, чтобы останавливать перемещение рабочего оборудования (например, грузового бункера 232). Тормозные узлы 182 могут приводиться в действие по команде от контроллера 200, например, на основе входных данных, принятых от интерфейса 210 "человек-транспортное средство", а также на основе команд от системы 110 запуска. В одном примере тормозные узлы 280 могут быть приведены в действие по команде остановки от системы 110 запуска. В результате, в этом контексте, команда остановки может останавливать перемещение или работу какой-либо системы или компонента, связанных с рабочим транспортным средством 120, включающих в себя двигатель 240, трансмиссию 250 или колеса 252 (например, останавливать движение всего рабочего транспортного средства 120), а также гидравлической системы 270 (например, останавливать перемещение рабочего оборудования, такого как грузовой бункер 232). Один или более датчиков 282 тормоза могут быть предусмотрены, чтобы собирать информацию, связанную с тормозными узлами 280.
[55] Рабочее транспортное средство 120 может дополнительно включать в себя аккумуляторный узел 284 с одним или более аккумуляторами, которые предоставляют электрическую энергию различным компонентам рабочего транспортного средства 120, включающим в себя пусковое устройство 258. Другие компоненты, питаемые посредством аккумуляторного узла 284, могут включать в себя различные датчики (например, датчики, обсуждаемые в данном документе), узел 294 освещения, компонент 216 связи транспортного средства и т.п.
[56] Аккумуляторный узел 284 может считаться имеющим состояние заряда, которое представляет количество электрической энергии, которое аккумуляторный узел 284 способен предоставить в конкретное время. На состояние заряда может влиять множество факторов, включающих в себя коэффициент использования аккумулятора и температуру. Обычно, аккумуляторный узел 284 перезаряжается при работе двигателя 240 (например, в которой механическая энергия преобразуется в электрическую энергию через генератор переменного тока). В заданный момент времени состояние заряда может быть измерено или иначе определено посредством датчика 286 аккумулятора, который предоставляет соответствующие сигналы контроллеру 200 и/или системе 110 запуска. Аккумуляторный узел 284 может управляться посредством контроллера 200 (и/или модуля управления аккумулятором) на основе команд от водителя через интерфейс 210 "человек-транспортное средство" и/или от системы 110 запуска.
[57] Рабочее транспортное средство 120 может дополнительно включать в себя систему 288 управления климатом, которая функционирует, чтобы наблюдать за желаемой температурой в кабине 220. Система 288 управления климатом может включать в себя нагревательное приспособление и/или охлаждающее приспособление. Нагревающее приспособление, в целом, работает, чтобы доставлять нагретый воздух в кабину 220 (например, от отдельного нагревательного элемента или от двигателя 240). В одном примере охлаждающее приспособление, в целом, работает, чтобы доставлять охлажденный воздух в кабину 220, такой как воздух, нагнетаемый поверх охладителя в контуре охлаждения. Система 288 управления климатом может быть задействована на основе сигналов от контроллера 200 и/или системы 110 запуска. В одном примере система 288 управления климатом может включать в себя один или более датчиков 298 температуры, включающих в себя один или более датчиков температуры в кабине, чтобы измерять температуры в кабине, и/или один или более датчиков температуры снаружи кабины, чтобы измерять окружающие температуры. Другие компоненты, которые могут считаться частью системы 288 управления климатом, включают в себя размораживатели окон и/или зеркал, подогреваемые сиденья, подогреваемое рулевое колесо и т.п.
[58] Различные компоненты рабочего транспортного средства 120 могут быть размещены посредством отсеков 292 кузова, расположенных на раме 230 транспортного средства. Такие отсеки 292 кузова могут включать в себя съемные или открываемые дверцы панели, которые предоставляют возможность доступа к связанному компоненту, размещенному в них.
[59] Рабочее транспортное средство 120 может дополнительно включать в себя узел 294 освещения с одним или более источниками света. Источники света могут включать в себя любое светоизлучающее устройство, такое как лампа накаливания, матрица светоизлучающих диодов (LED) и т.п., которое освещает один или более частей пользовательского окружения и/или окружающей среды на основе одного или более управляющих сигналов от контроллера 200.
[60] Вместе с датчиками, обсужденными выше, дополнительные датчики могут также быть предусмотрены, чтобы наблюдать за различными условиями, связанными с рабочим транспортным средством 120. Например, различные датчики 302 могут быть расположены на или рядом с рамой 230 для того, чтобы измерять позиционные параметры, такие как наклон на подъеме или спуске транспортного средства 120, и т.п. Кроме того, различные датчики 304 располагаются на или рядом с рамой 230 для того, чтобы наблюдать за ориентацией грузового бункера 232 относительно рамы 230. Дополнительно, рабочее транспортное средство 120 может включать в себя один или более датчиков 300 местоположения или позиции, таких как приемник системы глобального позиционирования (GPS), LORAN-система, инерциальная система наведения, сотовая система триангуляции или другая система позиционирования, которые предоставляют сигналы контроллеру 200 и системе 110 запуска, чтобы устанавливать местоположение рабочего транспортного средства 120. Такие датчики 300 и связанные системы могут рассматриваться как включающие в себя, например, программное обеспечение картографии или программное обеспечение навигации, которые формируют желаемые карты, навигационные маршруты и другие географические функции. Рабочее транспортное средство 120 может также включать в себя часы 306, которые предоставляют время дня и дату.
[61] В дополнительных вариантах осуществления рабочее транспортное средство 120 может включать в себя один или более датчиков 310 изображения, которые функционируют, чтобы захватывать изображение рабочего транспортного средства 120 и/или окружающей среды. Как описано ниже, датчик 310 изображения может быть частью системы обработки изображений, в которой захваченные изображения анализируются и/или оцениваются на предмет различных характеристик. Датчик 310 изображения может включать в себя одну или более камер, хотя другие типы датчиков изображения могут быть предусмотрены. В одном варианте осуществления датчик 310 изображения позиционируется, чтобы захватывать вид сверху или "с высоты птичьего полета". Это вид предоставляет единый, полный вид рабочего транспортного средства 120 и непосредственно прилегающего окружения. В некоторых вариантах осуществления датчик 310 изображения может включать в себя сервомотор, который предоставляет возможность регулировки или повторного позиционирования. В некоторых случаях датчик 310 изображения может взаимодействовать с узлом 294 освещения, чтобы освещать вид, который должен быть захвачен.
[62] Рабочее транспортное средство 120 может дополнительно включать в себя один или более датчиков 320, 322 приближения. Такие датчики 320, 322 могут быть размещены на рабочем транспортном средстве 120, чтобы идентифицировать присутствие или отсутствие объектов, окружающих рабочее транспортное средство 120. Может быть предусмотрен любой подходящий тип датчика 320, 322 приближения, включающий в себя оптические датчики, инфракрасные датчики и радиолокационные или лидар-системы. В этом примере датчики 320, 322 приближения размещаются на передней и задней сторонах рабочего транспортного средства 120, хотя могут быть предусмотрены любые позиции.
[63] Компоненты рабочего транспортного средства 120 будут использованы в качестве примеров в обсуждении системы 110 запуска, предоставленном ниже.
Системы запуска рабочего транспортного средства
[64] Фиг. 3 - это упрощенная блок-схема системы 110 запуска. В целом, компоненты системы 110 запуска, обсуждаемой со ссылкой на фиг. 3, находятся на борту рабочего транспортного средства 120. В некоторых вариантах осуществления, однако, одна или более функций могут выполняться на устройстве 130 дистанционного управления и/или в удаленном центре 140.
[65] В одном примере система 110 запуска может рассматриваться как включающая в себя контроллер 350 запуска. В целом, контроллер 350 запуска может управлять всей работой системы 110 запуска, чтобы инициировать дистанционный запуск, либо автоматически, либо на основе команд водителя, и/или верифицировать, что дистанционный запуск является надлежащим, либо автоматически, либо на основе команд водителя или диспетчера. Контроллер 350 запуска может быть внедрен в контроллер 200 рабочего транспортного средства, обсужденный выше, или контроллер 350 запуска может быть автономным контроллером.
[66] В целом, контроллер 350 запуска может быть выполнен как вычислительное устройство с связанными процессорными устройствами и архитектурами памяти, как реализованная аппаратным образом вычислительная схема, как программируемая схема, как гидравлический, электрический или электро-гидравлический контроллер, или иначе, которые, в целом, представлены на фиг. 3 как процессор 352. По существу, контроллер 350 запуска может быть выполнен с возможностью исполнять различную вычислительную и управляющую функциональность относительно системы 110 запуска, например, в качестве программ, сохраненных в памяти 354.
[67] В одном варианте осуществления система 110 запуска может рассматриваться как включающая в себя, или иначе взаимодействующая с, интерфейс 210 "человек-транспортное средство" и компонент 216 связи транспортного средства для рабочего транспортного средства 120, подробности которых обсуждены выше. В некоторых примерах пользовательский интерфейс и блок связи, связанные с системой 110 запуска, могут быть автономными или специализированными компонентами со сравнимыми функциями. Как отмечено выше, интерфейс 210 "человек-транспортное средство", в целом, функционирует, чтобы предоставлять возможность водителю в рабочем транспортном средстве 120 взаимодействовать с системой 110 запуска (например, вводить команды и данные и принимать данные и/или предоставлять возможность включать или отключать один или более аспектов системы 110 запуска). Компонент 216 связи транспортного средства, в целом, функционирует, чтобы предоставлять возможность связи между контроллером 350 запуска и рабочим транспортным средством 120, устройством 130 дистанционного управления и/или удаленным центром 140.
[68] Система 110 запуска может дополнительно рассматриваться как включающая в себя, или иначе взаимодействующая с, различные системы 340 рабочего транспортного средства и различные датчики 342 рабочего транспортного средства. Системы 340 транспортного средства, в целом, ссылаются на любой из компонентов рабочего транспортного средства, описанных выше, и/или компоненты рабочей машины, как правило, встроенные в такие рабочие машины. Примеры включают в себя грузовой бункер 232, двигатель 240, трансмиссию 250, пусковые устройства 258, систему 242 смазки двигателя, систему 244 охлаждения двигателя, систему 260 обработки выхлопного газа, систему 264 рулевого управления с усилителем, гидравлические системы 270, тормозные узлы 280, аккумуляторный узел 284, систему 288 управления климатом, отсеки 292 кузова и узел 294 освещения. Аналогично, датчики 342 транспортного средства, в общем, ссылаются на любые датчики рабочей машины, описанные выше, и/или компоненты рабочего транспортного средства, как правило, включенные в такие рабочие транспортные средства. Примеры включают в себя датчики 254 трансмиссии, датчики 256 давления в шинах, датчики 246 системы смазки, датчики 248 системы охлаждения, датчики 262 системы обработки выхлопного газа, датчик 266 системы рулевого управления с усилителем, датчики 276 гидравлической системы, тормозные датчики 282, датчик 286 аккумулятора, датчики 298 температуры, датчики 300 местоположения или позиции, датчики 302 рамы, часы 306, датчик 308 топлива, датчики 310 изображения, датчики 320, 322 приближения и любые другие подходящие датчики. Связь между системой 110 запуска и системой 340 транспортного средства и датчиками 342 транспортного средства может происходить непосредственно или через контроллер 200 транспортного средства.
[69] Как представлено выше и описано более подробно ниже, контроллер 350 запуска может, в частности, быть выполнен с возможностью реализовывать один или более функциональных блоков или модулей, включающих в себя модуль 360 запуска, модуль 370 наблюдения, модуль 380 верификации и хранилище 390 данных (или базу данных). Как может быть оценено, модули, показанные на фиг. 3, могут быть объединены и/или дополнительно разделены, чтобы аналогично работать согласно функциям, описанным в данном документе.
[70] В целом, модуль 360 запуска может быть предусмотрен, чтобы управлять различными аспектами работы системы 110 запуска. Модуль 360 запуска может обмениваться информацией с интерфейсом 210 "человек-транспортное средство", компонентом 216 связи транспортного средства, системами 340 транспортного средства и/или датчиками 342 транспортного средства. Модуль 360 запуска может дополнительно инициировать функции, связанные с модулем 370 наблюдения и/или модулем 380 верификации, и один или более модулей 360, 370, 380 могут извлекать или сохранять информацию с помощью хранилища 390 данных.
[71] В одном варианте осуществления модуль 360 запуска может принимать сигналы от интерфейса 210 "человек-транспортное средство" и/или компонента 216 связи, чтобы предоставлять возможность работы системы 110 запуска. Работа системы 110 запуска может принимать множество форм. В одном примере модуль 360 запуска инициирует наблюдение или функцию автозапуска в модуле 370 наблюдения. Функция автозапуска может наблюдать за характеристиками рабочего транспортного средства 110, когда рабочее транспортное средство 110 находится в "выключенном состоянии" (например, когда другие компоненты или главные компоненты рабочего транспортного средства неактивны). В частности, модуль 370 наблюдения может принимать информацию от датчиков 342 транспортного средства и/или других источников данных, и когда информация в форме значений параметров удовлетворяет одному или более условиям инициирования запуска, сохраненным в хранилище 390 данных, модуль 370 наблюдения может инициировать команду инициации запуска, предоставленную модулю 360 запуска. При приеме команды инициирования запуска модуль 360 запуска может формировать соответствующую команду активации запуска для одной или более систем 340 транспортного средства. В некоторых вариантах осуществления модуль 370 наблюдения может продолжать наблюдать за информацией от датчиков 342 транспортного средства, и когда информация удовлетворяет одному или более условиям инициирования остановки, сохраненным в хранилище 390 данных, модуль 370 наблюдения может инициировать команду инициации остановки, которая может быть предоставлена модулю 360 запуска. При приеме команды инициирования остановки модуль 360 запуска может формировать соответствующую команду остановки для одной или более систем 340 транспортного средства.
[72] В некоторых вариантах осуществления модуль 360 запуска может принимать команду инициирования запуска непосредственно от устройства 130 дистанционного управления и/или удаленного центра 140 через компонент 216 связи транспортного средства. В любом случае, в других вариантах осуществления, при приеме команды инициирования запуска, модуль 360 запуска может инициировать функцию верификации в модуле 380 верификации. Модуль 380 верификации может принимать информацию от датчиков 342 транспортного средства, и когда информация удовлетворяет одному или более условиям запуска, сохраненным в хранилище 390 данных, модуль 380 верификации может инициировать подтверждение верификации, предоставляемое модулю 360 запуска. При приеме подтверждения верификации модуль 360 запуска может формировать соответствующую команду запуска для одной или более систем 340 транспортного средства. В некоторых примерах модуль 380 верификации может связываться с удаленным центром 140 и/или устройством 130 дистанционного управления через компонент 216 связи транспортного средства для того, чтобы оценивать условия верификации. Дополнительные детали и более конкретные реализации системы 110 запуска обсуждаются ниже.
[73] Фиг. 4 - это схематичная блок-схема с потоками данных, которая иллюстрирует различные аспекты системы 110 запуска в контексте реализации автоматического дистанционного запуска. В частности, как обсуждалось ниже, система 110 запуска наблюдает за различными значениями параметров, чтобы инициировать автоматический запуск, когда одно или более значений параметров удовлетворяют одному из условий инициирования дистанционного запуска. В дополнение к компонентам, обсужденным выше со ссылкой на фиг. 3, в этом варианте осуществления система 110 запуска может взаимодействовать с одним или более из устройства 130 дистанционного управления и/или удаленного центра 140.
[74] Работа системы 110 запуска может быть инициирована множеством способов. Например, модуль 360 запуска может принимать сигнал 410 разрешения автозпуска от интерфейса 210 "человек-транспортное средство". Это может происходить, например, когда водитель в рабочем транспортном средстве 120 отходит на период времени, но полезно, чтобы транспортное средство 120 автоматически запускалось в его или ее отсутствие в некоторых условиях.
[75] В некоторых случаях инициирование системы 110 запуска может происходить удаленно, например, с устройства 130 дистанционного управления и/или удаленного центра 140. В частности, устройство 130 дистанционного управления и удаленный центр 140 могут отправлять сообщения 400, 402 разрешения автозапуска, которые принимаются компонентом 216 связи транспортного средства, который, в свою очередь, предоставляет сообщения 400, 402 разрешения автозапуска непосредственно модулю 360 запуска или, как показано, формирует сигнал 412 разрешения автозапуска в ответ на сообщения 400, 402 разрешения автозапуска.
[76] При приеме сигналов 410, 412 разрешения автозапуска модуль 360 запуска формирует запрос 420 наблюдения модулю 370 наблюдения. В ответ модуль 370 наблюдения принимает сигналы датчиков, представляющие значения 430 параметров, от одного или более датчиков 342 транспортного средства, связанных с рабочим транспортным средством 120. В некоторых случаях модуль 370 наблюдения и/или модуль 360 запуска может формировать соответствующие команды, чтобы предоставлять питание датчикам 342 транспортного средства от аккумуляторного узла 284, так что датчики 342 транспортного средства могут собирать соответствующую информацию. Значения 430 параметров могут быть связаны с любым релевантным параметром, и более конкретные примеры предоставляются ниже.
[77] Модуль 370 наблюдения может дополнительно извлекать одно или более условий 440 инициирования запуска (или условий запуска), которые могут быть сохранены в хранилище 390 данных. Условия 440 инициирования запуска, в целом, представляют пороговые значения или значения некоторых параметров, при которых операция автоматического запуска является надлежащей. Условия 440 инициирования запуска могут иметь любой применимый формат, такой как "для [параметра_n транспортного средства], если [значение_параметра_n] > [порогового значения_параметра_n], тогда [команда_запуска_n]" или "для [параметра_n транспортного средства], если [значение_параметра_n] < [порогового значения_параметра_n], тогда [команда_запуска_n]", в зависимости от природы параметра.
[78] Модуль 370 наблюдения оценивает условия 440 инициирования запуска, принимая во внимание значения 430 параметров. Если значениям 430 параметров не удается удовлетворять условиям 440 инициирования запуска, модуль 370 наблюдения не предпринимает действие, и наблюдение продолжается до тех пор, пока работа системы 110 запуска не будет прервана.
[79] Когда одно или более значений 430 параметров удовлетворяет одному или более условиям 440 инициирования запуска, модуль 370 наблюдения может формировать запрос 450 инициирования запуска для модуля 360 запуска. В ответ на запрос 450 инициирования запуска модуль 360 запуска может формировать команду 460 запуска для одной или более систем 340 транспортного средства. Тип и природа команды 460 запуска могут быть определены по релевантному условию 440 инициирования запуска. В некоторых вариантах осуществления модуль 360 запуска может инициировать функцию верификации перед формированием команды 460 запуска, которая обсуждается более подробно ниже.
[80] В одном примере команда 460 запуска может быть для пускового устройства 258, чтобы приводить в результате к активации первичного двигателя рабочего транспортного средства 120. В этом контексте, первичный двигатель может ссылаться на один или более основных компонентов рабочего транспортного средства 120, таких как двигатель 240, аккумуляторный модуль 284 и/или грузовой бункер 232. Дополнительные примеры предоставляются ниже. После выдачи команды 460 запуска модуль 360 запуска может формировать сообщение для устройства 130 дистанционного управления и/или удаленного центра 140.
[81] В некоторых вариантах осуществления, перед формированием команды 460 запуска и/или как часть команды 460 запуска, система 110 запуска может предоставлять "предупреждения о запуске" для кого-либо, кто может быть поблизости от рабочего транспортного средства 120. Например, система 110 запуска может командовать рабочему транспортному средству издавать сигнал сирены и мигать огнями и затем ожидает в течение допустимого интервала времени перед запуском двигателя 240.
[82] В некоторых примерах значения 430 параметров и/или условие 440 инициирования запуска могут быть связаны с комфортом водителя. В частности, автоматический запуск может функционировать, чтобы заранее создавать условия в кабине 220 рабочего транспортного средства 120 перед прибытием водителя. Например, значения 430 параметров от датчиков 342 транспортного средства могут соответствовать температурам в кабине и/или окружающим температурам от датчика 298 температуры. Когда значение 430 параметра, представляющее температуру в кабине и/или окружающую температуру, достигает предварительно определенного порогового значения связанного условия 440 инициирования запуска, система 110 запуска может формировать команду 460 запуска, чтобы запускать одну или более из системы 288 управления климатом, аккумуляторного узла 284 и/или двигателя 240, чтобы охлаждать и/или нагревать кабину 220. Например, в жаркую погоду, система 288 управления климатом может функционировать, чтобы охлаждать кабину 220, когда температура достигает некомфортного значения, или, в холодную погоду, система 288 управления климатом может функционировать, чтобы нагревать кабину 220, когда температура достигает некомфортного значения. Аккумуляторный узел 284 и/или двигатель 240 могут активироваться, чтобы питать один или более аспектов системы 288 управления климатом. В результате, кабина 220 рабочего транспортного средства 120 может иметь температуру, подходящую для комфорта водителя, когда водитель прибывает, тем самым, избегая какой-либо задержки в последующей эксплуатации.
[83] В некоторых примерах значения 430 параметров и/или условие 440 инициирования запуска могут быть связаны с аккумуляторным узлом 284. В частности, автоматический запуск может функционировать, чтобы гарантировать, что аккумуляторный узел 284 поддерживает достаточный заряд, чтобы запускать транспортное средство 120. Например, значение 430 параметра от датчиков 342 транспортного средства может соответствовать состоянию заряда аккумуляторного узла 284 от датчика 286 аккумулятора. Когда значение состояния заряда аккумуляторного узла 284, представленное значением 430 параметра, достигает предварительно определенного порогового значения связанного условия 440 инициирования запуска, система 110 запуска может формировать команду 460 запуска, чтобы запускать двигатель 240. Работа двигателя 240 функционирует, чтобы заряжать аккумуляторный узел 284, тем самым, предотвращая дополнительные снижения в состоянии заряда аккумуляторного узла 284 и вероятность того, что аккумуляторный узел 284 будет недостаточно заряжен, чтобы запускать двигатель 240, когда водитель прибудет.
[84] В аналогичном примере значение 430 параметра может быть временем, прошедшим со времени последней работы (например, последнего запуска и/или со времени последнего отключения), и условием 440 инициирования запуска может быть пороговое значение времени. Как отмечено выше, часы 306 могут рассматриваться как один из датчиков 342 транспортного средства, в то время как в других примерах прошедшее время может быть определено внутренним образом в контроллере 350 запуска и/или контроллере 200 рабочего транспортного средства. Пороговое время условия 440 инициирования запуска может быть выбрано, чтобы избегать падения состояния заряда аккумуляторного модуля 284 ниже нежелательного низкого значения. В дополнительных примерах пороговое время условия 440 инициирования запуска может быть выбрано, чтобы обеспечивать регулярную циркуляцию охлаждающей жидкости и/или смазочных жидкостей через двигатель 240 и другие части рабочего транспортного средства 120.
[85] В дополнительных примерах значения 430 параметров и/или условия 440 инициирования запуска могут быть связаны с расписанием, функциями хода работ и/или операционной логистикой. Например, значение 430 параметра может быть приемом сигнала идентификации, а условие 440 инициирования запуска может быть распознаванием сигнала идентификации, связанным с назначенным водителем рабочего транспортного средства 120. Как отмечено выше, устройство 130 дистанционного управления, связанное с водителем, может транслировать сигнал идентификации, принимаемый одним из датчиков 342 или компонентом 216 связи транспортного средства для рабочего транспортного средства 120, когда водитель прибывает на место проведения работ. При приеме, модуль 370 наблюдения определяет, что идентификация удовлетворяет одному из условий 440 инициирования запуска (например, в качестве одобренного водителя), и система 110 запуска формирует команду 460 запуска. Эта автоматическая операция может функционировать, чтобы предотвращать или смягчать какие-либо задержки в работе, когда водитель готов начать работу.
[86] В дополнительном примере значение 430 параметра может быть приемом сигнала идентификации от взаимодействующего рабочего транспортного средства, а условие 440 инициирования запуска может быть распознаванием сигнала идентификации, связанного с взаимодействующим рабочим транспортным средством. В этом контексте, взаимодействующее рабочее транспортное средство является транспортным средством, по которому прогнозируется функционирование соответствующего рабочего транспортного средства 120. Например, рабочее транспортное средство 120 может быть автомобилем-самосвалом, а взаимодействующее рабочее транспортное средство может быть погрузчиком, который загружает рабочее транспортное средство 120 материалом для транспортировки. В этом случае, рабочее транспортное средство 120 имеет небольшую функцию или не имеет функции до прибытия погрузчика в конкретном местоположении.
[87] Продолжая этот пример, как представлено выше, другие рабочие транспортные средства могут транслировать сигнал идентификации, принимаемый одним из датчиков 342 или компонентом 216 связи транспортного средства для рабочего транспортного средства 120, когда взаимодействующее рабочее транспортное средство прибывает на место проведения работ. При приеме, модуль 370 наблюдения определяет, что идентификация удовлетворяет одному из условий 440 инициирования запуска (например, в качестве взаимодействующего рабочего транспортного средства), и система 110 запуска формирует команду 460 запуска. Эта операция может функционировать, чтобы предотвращать или смягчать задержки в работе.
[88] В аналогичном примере условия 440 инициирования запуска могут включать в себя или иначе объединять расписание работы, в котором текущее время и день представляются в значениях 430 параметров, которые сравниваются с запланированными временами и днями запуска, представленными в условиях 440 инициирования запуска. Это предоставляет возможность системе 110 запуска запускать рабочее транспортное средство 120 по конкретному расписанию.
[89] Фиг. 5 - это схематичная блок-схема с потоками данных, которая иллюстрирует различные аспекты системы 110 запуска в контексте реализации работы в автоматическом цикле в холодную погоду. В частности, как обсуждается ниже, система 110 запуска наблюдает за различными значениями параметров, чтобы инициировать автоматический запуск, когда одно или более значений параметров удовлетворяет одному из условий инициирования дистанционного запуска, и дополнительно инициировать автоматическую остановку, когда один или более параметров удовлетворяют одному из условий инициирования дистанционной остановки.
[90] Как отмечено выше, реализация на фиг. 5, в целом связывается с условиями холодной погоды, которые, если не устранены, могут задерживать или препятствовать ручному запуску водителем в более позднее время. В качестве примера, может быть нежелательным эксплуатировать двигатель 240 при очень низких температурах. Такая эксплуатация может приводить в результате к проблемам конденсации, выбросов и/или эффективности. В некоторых случаях, один или более типов жидкостей транспортного средства могут сгущаться или иначе быть нарушены. Обычно, когда имеешь дело с этим типом проблемы, водителю может требоваться "предварительно прогревать" двигатель 240 или другие системы транспортного средства с помощью электрического нагревателя, тем самым, потенциально приводя в результате к эксплуатационным задержкам. В некоторых случаях такие температуры могут требовать обслуживания транспортного средства, если не устранены. Эти типы проблем особенно существенны, когда водитель оставляет транспортное средство 120 на месте проведения работ на ночь в холодных климатических условиях. По существу, реализация на фиг. 5 может иметь параметры датчика и/или условия инициирования запуска, связанные с проблемами холодной погоды. Более конкретные примеры обсуждаются ниже.
[91] Аналогично примеру на фиг. 4, функционирование системы 110 запуска на фиг. 5 может быть инициировано множеством способов. Например, модуль 360 запуска может принимать сигнал 510 разрешения автозапуска от интерфейса 210 "человек-транспортное средство". В некоторых случаях инициирование системы 110 запуска может происходить удаленно, например, с устройства 130 дистанционного управления и/или удаленного центра 140. В некоторых ситуациях система 110 запуска может формировать упреждающее сообщение для устройства 130 дистанционного управления и/или удаленного центра 140 в качестве напоминания для водителя или диспетчера о доступности функции автозапуска. Такое сообщение может быть сформировано, например, на основе прогнозов погоды и/или координат местоположения.
[92] В любом случае, устройство 130 дистанционного управления и удаленный центр 140 могут отправлять соответствующие сообщения 500, 502 разрешения автозапуска, принимаемые компонентом 216 связи транспортного средства, который, в свою очередь, предоставляет сообщения 500, 502 разрешения автозапуска непосредственно модулю 360 запуска или, как показано, формирует сигнал 512 разрешения автозапуска в ответ на сообщения 500, 502 разрешения автозапуска.
[93] При приеме сигналов 510, 512 разрешения автозапуска модуль 360 запуска формирует запрос 520 режима наблюдения для модуля 370 наблюдения. После формирования запроса 520 режима наблюдения для модуля 370 наблюдения модуль 360 запуска (и/или вся система 110 запуска) может считаться работающим в "режиме наблюдения".
[94] В ответ на запрос 520 режима наблюдения модуль 370 наблюдения принимает сигналы датчиков, представляющие значения 530 параметров, от одного или более датчиков 342 транспортного средства, связанных с рабочим транспортным средством 120. В некоторых случаях модуль 370 наблюдения и/или модуль 360 запуска может формировать соответствующие команды, чтобы предоставлять питание датчикам 342 транспортного средства от аккумуляторного узла 284, так что датчики 342 транспортного средства могут собирать соответствующую информацию.
[95] Также, в ответ на запрос 520 режима наблюдения, модуль 370 наблюдения может дополнительно извлекать одно или более условий 540 инициирования запуска (или условий запуска), которые могут быть сохранены в хранилище 390 данных. Как описано выше, условия 540 инициирования запуска, в целом, представляют пороговые значения или значения некоторых параметров, при которых автоматическая операция запуска является надлежащей.
[96] Модуль 370 наблюдения оценивает условия 540 инициирования запуска, принимая во внимание значения 530 параметров. Если значениям 530 параметров не удается удовлетворять условиям 540 инициирования запуска, модуль 370 наблюдения не предпринимает действие, и наблюдение продолжается до тех пор, пока работа системы 110 запуска не будет прервана.
[97] Когда одно или более значений 530 параметров удовлетворяет одному или более условиям 540 инициирования запуска, модуль 370 наблюдения может формировать запрос 550 инициирования запуска для модуля 360 запуска. В ответ на запрос 550 инициирования запуска модуль 360 запуска формирует команду 560 запуска для одной или более систем 340 транспортного средства, таких как пусковое устройство 258, чтобы приводить в результате к активации первичного двигателя рабочего транспортного средства 120. В одном примере команда 560 запуска функционирует, чтобы запускать двигатель 240. В некоторых вариантах осуществления команда 560 запуска может включать в себя приложение повышенной нагрузки на двигатель 240 или другую вспомогательную систему, чтобы ускорять прогрев двигателя 240. Как представлено выше и обсуждается более подробно ниже, в некоторых вариантах осуществления, модуль 360 запуска может выполнять функцию верификации перед формированием команды 560 запуска.
[98] После формирования команды 560 запуска для модуля 370 наблюдения, модуль 360 запуска (и/или вся система 110 запуска) может считаться работающим в "циклическом режиме" (или "режиме прогрева"). В циклическом режиме модуль 360 запуска отправляет запрос 522 циклического режима модулю 370 наблюдения.
[99] При приеме запроса 522 циклического режима модуль 370 наблюдения принимает вторые значения 532 параметров от датчиков 342 транспортного средства. Вторые значения 532 параметров могут быть теми же значениями, что и первые значения 530 параметров, обсужденные выше, или вторые значения 532 параметров могут отличаться от первых значений 530 параметров.
[100] Как представлено выше, дистанционный запуск может приводить в результате к запуску двигателя 240, и двигатель 240 может быть двигателем внутреннего сгорания, в котором топливо сжигается, чтобы генерировать мощность. Процесс сжигания приводит в результате к нагреву, который, в свою очередь функционирует так, чтобы поддерживать или повышать температуру релевантного параметра условия запуска, которое инициировало дистанционный запуск. Например, работающий двигатель 240 функционирует, чтобы повышать температуру охлаждающей жидкости, смазки и/или другой релевантный параметр, тем самым, избегая ситуации, в которой соответствующий параметр падает ниже нежелательной температуры.
[101] Также, в ответ на запрос 522 циклического режима, модуль 370 наблюдения может дополнительно извлекать одно или более условий 542 инициирования остановки (или условий остановки), которые могут быть сохранены в хранилище 390 данных. Условия 542 инициирования остановки, в целом, представляют пороговые значения или значения некоторых параметров, при которых автоматическая операция остановки является надлежащей. В частности, условия 542 инициирования остановки представляют пороговые значения, при которых проблемы, которые инициировали команду запуска, были адекватно устранены, и работа соответствующего первичного двигателя больше не нужна. Примеры будут обсуждены ниже.
[102] По существу, модуль 370 наблюдения оценивает условия 542 инициирования остановки, принимая во внимание вторые значения 532 параметров. Если значениям 532 параметров не удается удовлетворять условиям 542 инициирования остановки, модуль 370 наблюдения не предпринимает действие, и циклический режим продолжается.
[103] Когда одно или более значений 532 параметров удовлетворяет одному или более условиям 542 инициирования остановки, модуль 370 наблюдения может формировать запрос 552 инициирования остановки для модуля 360 запуска. В ответ на запрос 552 инициирования остановки модуль 360 запуска формирует команду 562 остановки для одной или более систем 340 транспортного средства, таких как пусковое устройство 258, чтобы приводить в результате к отмене активации первичного двигателя рабочего транспортного средства 120. В одном примере команда 562 остановки функционирует, чтобы останавливать двигатель 240. После выдачи команды 562 остановки модуль 360 запуска (и/или система 110 запуска) может возвращаться к работе в режиме наблюдения, как описано выше.
[104] Как отмечено выше, реализация системы 110 запуска на фиг. 5, в целом, связывается с холодными погодными условиями. По существу, автоматический запуск может функционировать, чтобы предохранять двигатель 240 или другой элемент транспортного средства от нежелательного охлаждения, приводя в действие двигатель 240, который создает тепло от процесса сгорания, и прекращая работу двигателя 240, когда надлежит, тем самым, избегая лишнего времени работы вхолостую.
[105] В качестве примера, первые значения 530 параметров от датчиков 342 транспортного средства могут соответствовать температурам двигателя, температурам смазки, температурам охлаждающей жидкости и/или окружающим температурам от одного или более соответствующих датчиков температуры. Когда первые значения 530 параметров, представляющие такие температуры, достигают предварительно определенного порогового значения связанного условия 540 инициирования запуска, система 110 запуска может формировать команду 560 запуска, чтобы запускать двигатель 240, чтобы избегать дальнейших снижений в температуре и/или нагревать соответствующий элемент транспортного средства.
[106] Аналогично, вторые значения 532 параметров от датчиков 342 транспортного средства могут соответствовать тем же (или отличающимся) температурам двигателя, температурам смазки, температурам охлаждающей жидкости и/или окружающим температурам. Когда вторые значения 532 параметров, представляющие такие температуры, достигают предварительно определенного порогового значения связанного условия 542 инициирования остановки, система 110 запуска может формировать команду 562 остановки, чтобы останавливать двигатель 240. В частности, пороговое значение условия 542 инициирования остановки может представлять температуру, при которой нагрев больше не нужен. В некоторых случаях вторые значения 543 параметров могут быть предварительно определенным периодом времени работы двигателя. В других вариантах осуществления пороговое значение условия остановки может быть функцией погодных условий или расписания. Например, пороговое значение условий 542 инициирования остановки может представлять температуру, которая является довольно теплой, достаточной, чтобы избегать дополнительных автоматических запусков в режиме наблюдения до прибытия водителя и/или в течение допустимого интервала времени.
[107] В реализациях на фиг. 4 и 5 модуль 360 запуска формирует команду запуска (например, команду 460, 560 запуска) в ответ на запрос инициирования запуска (например, запрос 450, 550 инициирования запуска). В некоторых вариантах осуществления система 110 запуска может верифицировать, что условия запуска являются надлежащими, перед выдачей команды запуска для связанной системы 340 транспортного средства. Как описано ниже, система 110 запуска может выполнять функцию верификации независимо от источника запроса инициирования запуска.
[108] Фиг. 6 - это схематичная блок-схема с потоками данных, которая иллюстрирует различные аспекты системы 110 запуска в контексте верификации, которая авторизует продолжение операции дистанционного запуска. Как и в примерах на фиг. 4 и 5, работа системы 110 запуска на фиг. 6 может быть инициирована множеством способов.
[109] В некоторых случаях инициирование системы 110 запуска может происходить удаленно, например, с устройства 130 дистанционного управления и/или удаленного центра 140. В частности, устройство 130 дистанционного управления и удаленный центр 140 могут отправлять соответствующие сообщения 600, 602 запроса дистанционного запуска, которые принимаются компонентом 216 связи транспортного средства, который, в свою очередь, предоставляет сообщения 600, 602 запроса дистанционного запуска непосредственно модулю 360 запуска или, как показано, формирует запрос 610 инициирования запуска в ответ на сообщения 600, 602 запроса дистанционного запуска.
[110] В целом, сообщения 600, 602 запроса дистанционного запуска являются "ручными" запросами, чтобы рабочее транспортное средство запускалось удаленно от запрашивающего (например, водителя с устройством 130 дистанционного управления или диспетчера в удаленном центре 140). Дополнительно, модуль 370 наблюдения может формировать запрос 612 инициирования запуска в ответ на функцию автозапуска. Например, водитель может включать одну или более функций автозапуска, таких как функции, обсужденные выше со ссылкой на фиг. 4 и 5. По существу, реализация на фиг. 6 может быть использована в качестве расширения и/или разновидности по отношению к реализациям на фиг. 4 или фиг. 5.
[111] В любом случае, при приеме запроса 610, 612 инициирования запуска, модуль 360 запуска формирует запрос 620 верификации для модуля 380 верификации. Как отмечено выше, модуль 380 верификации, в целом, функционирует, чтобы проверять, что условия являются подходящими для продолжения дистанционного запуска.
[112] Функция верификации модуля 380 верификации может выполняться любым подходящим образом. В одном варианте осуществления верификация может быть "ручной", например, функция автоверификации отключается, и верификация подтверждается водителем или другим человеком. В дополнительном варианте осуществления верификация может быть автоматической, например, функция автоверификации может быть включена. Как отмечено выше, функция верификации работает, чтобы, по существу, авторизовать или разрешать продолжать дистанционный запуск. Каждый из этих двух вариантов осуществления обсуждается ниже.
[113] В варианте осуществления, в котором автоверификация отключена, в ответ на запрос 620 верификации, модуль 380 верификации извлекает или иначе принимает сигналы датчиков, представляющие значения 630 параметров, от одного или более датчиков 342 транспортного средства, связанных с рабочим транспортным средством 120. Значения 630 параметров могут быть предварительно определены, выбраны водителем или диспетчером и/или определены условиями 640 верификации. В некоторых случаях модуль 370 наблюдения и/или модуль 360 запуска может формировать соответствующие команды, чтобы предоставлять питание датчикам 342 транспортного средства от аккумуляторного узла 284, так что датчики 342 транспортного средства могут собирать соответствующую информацию.
[114] Дополнительно, в ответ на запрос 620 верификации, модуль 380 верификации извлекает или иначе принимает сигналы от датчиков 342 транспортного средства (например, датчика 310 изображений), представляющие одно или более изображений 632 рабочего транспортного средства 120 и/или окружающей обстановки. В некоторых ситуациях модуль 380 верификации может активировать узел 294 освещения, чтобы освещать область, которая должна быть захвачена датчиками 310 изображения, например, на основе времени дня или доступного окружающего освещения. В некоторых вариантах осуществления модуль 380 верификации может принимать и значения 630 параметров, и изображения 632, в то время как в других вариантах осуществления модуль 380 верификации может принимать только значения 630 параметров или изображения 632.
[115] При приеме значений 630 параметров и/или изображений 632, модуль 380 верификации формирует состояние 650 верификации, которое отправляется в качестве одного или более сообщений 660, 662 состояния верификации посредством компонента 216 связи транспортного средства. Обычно, сообщения 660, 662 состояния верификации отправляются стороне, которая инициировала сообщения 600, 602 запроса дистанционного запуска. Другими словами, когда устройство 130 дистанционного управления сформировало сообщение 600 запроса дистанционного запуска, компонент 216 связи транспортного средства отправляет сообщение 660 состояния верификации устройству 130 дистанционного управления; или когда удаленный центр 140 сформировал сообщение 602 запроса дистанционного запуска, компонент 216 связи транспортного средства отправляет сообщение 662 состояния верификации удаленному центру 140. Другими словами, либо устройству 130 дистанционного управления, либо удаленному центру 140 может быть поставлена задача выполнения функции верификации для всех дистанционных запусков. Другими словами, даже если устройство 130 дистанционного управления сформировало сообщение 600 запроса дистанционного запуска, компонент 216 связи транспортного средства может отправлять сообщение 662 состояния верификации удаленному центру 140; или даже если удаленный центр 140 сформировал сообщение 602 запроса дистанционного запуска, компонент 216 связи транспортного средства может отправлять сообщение 660 состояния верификации устройству 130 дистанционного управления.
[116] В любом случае, сообщение 660, 662 состояния верификации, в целом, функционирует, чтобы представлять некоторый аспект параметров датчиков транспортного средства и/или изображения для просмотра водителем через устройство 130 дистанционного управления и/или диспетчером через удаленный центр 140, чтобы определять, являются ли условия подходящими для того, чтобы рабочее транспортное средство 120 продолжило дистанционный запуск. Примеры сообщений 660, 662 состояния верификации предоставляются ниже со ссылкой на фиг. 7 и 8.
[117] Если условия не являются подходящими, водитель или диспетчер отклоняет одобрение дистанционного запуска, и дистанционный запуск прерывается. Если условия являются допустимыми, водитель или диспетчер отправляет сообщение 670, 672 одобрения верификации, которое принимается компонентом 216 связи транспортного средства. В ответ, компонент 216 связи транспортного средства формирует одобрение 680 верификации, которое принимается модулем 380 верификации.
[118] При приеме одобрения 680 верификации модуль 380 верификации формирует подтверждение 622 верификации для модуля 360 запуска. В ответ модуль 380 верификации формирует команду 690 запуска для системы 340 транспортного средства, как обсуждалось выше со ссылкой на фиг. 4 и 5.
[119] Как отмечено выше, в некоторых вариантах осуществления, система 110 запуска, в частности, модуль 380 верификации, может иметь функцию автоверификации, которая включена. В таком варианте осуществления модуль 380 верификации принимает запрос 620 верификации, и, в ответ, модуль 380 верификации принимает сигналы датчиков, представляющие значения 630 параметров, от одного или более датчиков 342 транспортного средства, связанных с рабочим транспортным средством 120. Также в ответ на запрос 620 верификации модуль 380 верификации может дополнительно извлекать одно или более условий 640 верификации, которые могут быть сохранены в хранилище 390 данных. Условия 640 верификации, в целом, представляют пороговые значения или значения некоторых параметров, при которых продолжение операции дистанционного запуска является надлежащим.
[120] Модуль 380 верификации оценивает условия 640 верификации, принимая во внимание значения 630 параметров. Если значениям 630 параметров не удается удовлетворять условиям 640 верификации, модуль 380 верификации не предпринимает действие и/или прерывает дистанционный запуск. В таком сценарии модуль 380 верификации и/или модуль 360 запуска могут формировать сообщение устройству 130 дистанционного управления и/или удаленному центру 140, указывающее, что дистанционный запуск был прерван.
[121] Когда одно или более значений 630 параметров удовлетворяет одному или более условиям 640 верификации, модуль 380 верификации может формировать подтверждение 622 верификации для модуля 360 запуска. Как отмечено выше, в ответ на подтверждение 622 верификации, модуль 360 запуска формирует команду 690 запуска для одной или более систем 340 транспортного средства, таких как пусковое устройство 258, чтобы приводить в результате к активации первичного двигателя рабочего транспортного средства 120. В одном примере команда 460 запуска функционирует, чтобы запускать двигатель 240.
[122] В некоторых вариантах осуществления модуль 380 верификации может дополнительно (или альтернативно) оценивать условия верификации, принимая во внимание изображения 632, принятые от датчика 342 транспортного средства, и данные 642 изображения, принятые из хранилища 390 данных. В качестве примера, модуль 380 верификации может реализовывать процессор 382 изображений (или систему технического зрения), чтобы оценивать изображения 632, принимая во внимание данные 642 изображения и/или условия 640 верификации. Процессор 382 изображения может оценивать изображения 632 любым подходящим образом. В одном варианте осуществления процессор 382 изображений может оценивать изображения 632 с помощью распознавания изображения, например, сравнивая изображения 632 с допустимыми изображениями в данных 634 изображений для того, чтобы идентифицировать какие-либо условия, которые должны препятствовать продолжению дистанционного запуска. В некоторых примерах допустимые изображения для сравнения могут быть изображением, захваченным перед тем, как водитель отлучается на день, или последним изображением, одобренным водителем или диспетчером. Как отмечено выше, функция автоверификации может выполняться удаленно или на транспортном средстве 120. Дополнительные примеры предоставляются ниже.
[123] Как отмечено выше, когда функция автозапуска отключена, система 110 запуска может формировать сообщение 660, 662 состояния верификации для просмотра водителем через устройство 130 дистанционного управления и/или диспетчером в удаленном центре 140. Фиг. 7 и 8 предоставляют примеры сообщений 700, 800 (например, соответствующих сообщениям 660, 662, обсужденным выше), которые могут быть предоставлены водителю или диспетчеру.
[124] Обращаясь к фиг. 7, сообщение 700 представлено в форме интерфейса, представляющего список условий 710 верификации и состояний 720, соответствующих каждому условию 710. Условия 710 верификации могут представлять условия, которые водитель в рабочем транспортном средстве 120 будет просматривать перед запуском рабочего транспортного средства 120. По существу, условия 710 верификации представляют виртуальный "общий осмотр". В этом примере условия 710 верификации включают в себя трансмиссию в положении парковки; уровень топлива является допустимым; уровень гидравлической жидкости является допустимым; уровень жидкости трансмиссии является допустимым; уровень охлаждающей жидкости является допустимым; препятствия не были идентифицированы; и местоположение является допустимым. Состояния 720 указывают, что связанные значения параметров (например, собранные значения 630 параметров от датчиков 342) находятся в допустимом диапазоне. В некоторых вариантах осуществления состояния 720 могут быть представлены в форме значения для каждого условия 710, так что водитель или диспетчер могут независимо оценивать условие 710. Условия 710, изображенные на фиг. 7, являются просто примерами. Другие условия могут быть предоставлены, и дополнительные примеры обсуждаются ниже. Если условия 710 и состояния 720 считаются допустимыми водителем или диспетчером, водитель или диспетчер может одобрять или отвергать сообщение 700 состояния верификации через интерфейс 730 ввода и формировать подходящее сообщение для модуля 380 верификации, как обсуждалось выше.
[125] Обращаясь к фиг. 8, сообщение 800 представлено в форме интерфейса, представляющего изображение 810 рабочего транспортного средства 812, а также окружающей обстановки. Изображение 810 предоставляет возможность водителю или диспетчеру оценивать условие или состояние рабочего транспортного средства 812 и окружающей обстановки. Например, в изображении 810 на фиг. 8, препятствие 814 находится рядом с рабочим транспортным средством 812. Если водитель или диспетчер определяет, что препятствие 814 находится слишком близко к рабочему транспортному средству 812, водитель или диспетчер может отвергать сообщение состояния верификации через интерфейс 830 ввода, чтобы отключать дистанционный запуск и отправлять соответствующее сообщение системе 110 запуска. Или, если водитель или диспетчер определяет, что препятствие 814 не является проблемой для рабочего транспортного средства 812, водитель или диспетчер может одобрять сообщение состояния верификации через интерфейс 830 ввода, и сообщение 670, 672 одобрения верификации отправляется системе 110 запуска, как обсуждалось выше. В дополнительных вариантах осуществления изображение 810 рабочего транспортного средства 120 предоставляет возможность водителю или диспетчеру идентифицировать, когда одна или более панелей на рабочем транспортном средстве 120 открыта, тем самым, приводя в результате к тому, что дистанционный запуск является неуместным. В некоторых примерах водитель может выполнять другие функции в сообщении 800, такие как запрос дополнительных изображений, регулировка угла изображений, увеличение или уменьшение масштаба, запрос активации узла 294 освещения и т.п.
[126] Различные условия верификации, учитываемые системой 110 запуска (либо автоматически, либо с помощью водителя или диспетчера), обсуждены выше, включают в себя трансмиссию в состоянии парковки; уровень топлива является допустимым; уровень гидравлической жидкости является допустимым; уровень жидкости трансмиссии является допустимым; уровень охлаждающей жидкости является допустимым; препятствия не были идентифицированы; и местоположение является допустимым. Другие условия включают в себя то, что уровень DEF является допустимым; состояние связи является допустимым; состояние рулевого управления с усилителем является допустимым. Дополнительные условия включают в себя угол, ориентацию и/или позицию рабочего инструмента, такого как грузовой бункер 232; температуры и/или давления в двигателе 240, трансмиссии 250, системе 244 охлаждения двигателя, системе 260 обработки выхлопного газа, системе 264 рулевого управления с усилителем, гидравлических системах 270 и/или тормозных узлах 280; заряд аккумуляторного узла 284; позицию или состояние различных дверей и защелок, которые составляют различные отсеки 292 кузова транспортного средства 120; и/или, в целом, состояние оборудования. Как отмечено выше, другие условия верификации могут быть связаны с местоположением транспортного средства 120. Например, система 110 запуска может проверять, что транспортное средство 120 находится на месте проведения работ или располагается на месте проведения работ в соответствующей рабочей позиции, например, под конкретным наклоном или ориентацией. В качестве другого примера, система 110 запуска может проверять, что транспортное средство 120 находится за пределами или иначе не находится внутри огороженного места. В качестве другого примера, система 110 запуска может проверять, что транспортное средство 120 не находится в процессе транспортировки и/или не готово к эксплуатации. Другие условия могут быть основаны на конкретном типе или функции рабочей машины 120.
[127] Обращаясь теперь также к фиг. 9, а также с продолжающейся ссылкой на фиг. 1-3, блок-схема последовательности операций иллюстрирует способ 900, который может выполняться посредством системы 110 запуска в соответствии с настоящим изобретением. Как может быть оценено в свете изобретения, порядок работы в способе 900 не ограничивается последовательным исполнением, как иллюстрировано на фиг. 9, но может выполняться в одном или более отличающихся порядках, когда применимо и находится в соответствии с настоящим изобретением. Дополнительный один или более этапов могут быть опущены, и/или дополнительные этапы добавлены.
[128] В одном примере способ 900 начинается на этапе 902. На этапе 902 система 110 запуска определяет, включена ли функция автозапуска, доступна и/или иначе присутствует для рабочей машины 120. Если функция автозапуска включена, способ 900 переходит к этапу 904, на котором система 110 запуска собирает значения параметров от рабочего транспортного средства 120.
[129] На этапе 906 система 110 запуска сравнивает значения параметров с условиями инициирования запуска. На этапе 908, если одно или более значений параметров удовлетворяют одному или более условиям инициирования запуска, способ 900 переходит к этапу 910. На этапе 908, если значениям параметров не удается удовлетворять условиям инициирования запуска, способ 900 возвращается к этапу 904.
[130] На этапе 910 система 110 запуска определяет, включена ли функция верификации, доступна и/или иначе присутствует. Когда функция верификации включена, способ 900 переходит к этапу 914.
[131] На этапе 914 система 110 запуска собирает значения параметров от рабочего транспортного средства 120. На этапе 916 система 110 запуска определяет, включена ли функция автоматической верификации, доступна и/или иначе присутствует. Когда функция автоматической верификации включена, способ 900 переходит к этапу 918, на котором система 110 запуска сравнивает значения параметров с условиями верификации. На этапе 920, если одно или более значений параметров удовлетворяют одному или более условиям верификации, способ 900 переходит к этапу 926. На этапе 920, если значениям параметров не удается удовлетворять условиям верификации, способ 900 возвращается к этапу 914.
[132] Возвращаясь к этапу 916, когда функция автоматической верификации не включена, способ 900 переходит к этапу 922. На этапе 922 система 110 запуска отправляет состояние верификации водителю или диспетчеру. На этапе 924 система 110 запуска определяет, было ли получено одобрение или подтверждение верификации от водителя или диспетчера. Если одобрение верификации было принято, способ 900 переходит к этапу 926; иначе, способ 900 продолжает ожидать одобрения верификации.
[133] Обращаясь опять к этапу 902, когда система 110 запуска определяет, что функция автозапуска не включена, способ переходит непосредственно к этапу 912, на котором система 110 запуска определяет, был ли принят запрос дистанционного запуска. Если запрос дистанционного запуска был принят, способ 900 переходит к этапу 914. Если запрос дистанционного запуска не был принят, способ 900 продолжает этап 912 до тех пор, пока такое сообщение не будет получено.
[134] Теперь обращаясь к этапу 926, который может получаться в результате этапа 910, этапа 920 или этапа 924, система 110 запуска формирует команду запуска для первичного двигателя рабочего транспортного средства 120, такого как двигатель. В некоторых вариантах осуществления система 110 запуска может продолжать собирать значения параметров (например, как на этапе 904 и этапе 914) и оценивать значения параметров, принимая во внимание условия (например, как на этапе 906, 908 и этапах 918, 920). В одном примере система 110 запуска может прекращать команду запуска и/или формировать команду остановки на основе значений параметров и условий. Это может быть использовано, например, когда конкретные параметры (например, некоторые давления и температуры) могут быть измерены, только когда первичный двигатель работает, и последующая оценка, принимая во внимание условия, может указывать, что операция запуска должна быть прекращена. Одним примером может быть давление масла, например, если после инициирования операции запуска давление масла не присутствует после короткого интервала времени, операция прекращается.
[135] Если операция запуска прекращается или иначе оказывается неспособной к запуску в соответствующих условиях, уведомление может быть отправлено водителю, обслуживающему персоналу и/или диспетчеру парка. Аналогично, если операция запуска успешна, система запуска может формировать подтверждающее уведомление и/или счетчик дистанционного запуска для водителя, обслуживающего персонала и/или диспетчера парка. Если операция запуска продолжается, способ 900 переходит к этапу 928.
[136] На этапе 928 система 110 запуска определяет, включена ли функция автоматического циклирования, доступна и/или иначе присутствует. Когда функция автоматического циклирования включена, способ 900 переходит к этапу 930, на котором система 110 запуска собирает значения параметров. На этапе 932 система 110 запуска сравнивает значения параметров с условиями инициирования остановки. На этапе 934, если одно или более значений параметров удовлетворяют одному или более условиям инициирования остановки, способ 900 переходит к этапу 936. На этапе 934, если значениям параметров не удается удовлетворять условиям инициирования остановки, способ 900 возвращается к этапу 930.
[137] На этапе 936 система 110 запуска формирует команду остановки для первичного двигателя. После этапа 936 способ 900 возвращается к этапу 904. Если, на этапе 928, функция автоматического циклирования не включена, способ 900 заканчивается на этапе 938.
[138] Соответственно, варианты осуществления, обсужденные выше, предоставляют улучшенные системы и способы дистанционного запуска, связанные с рабочей машиной. В частности, варианты осуществления предоставляют возможность сбора и оценки параметров транспортного средства, принимая во внимание условия, которые определяют подходящие ситуации запуска, релевантные для рабочей машины. По существу, примерные варианты осуществления улучшают эксплуатацию, безопасность и эффективность рабочего транспортного средства.
[139] Как будет понятно специалисту в области техники, некоторые аспекты раскрытого предмета изучения могут быть осуществлены как способ, система (например, система управления рабочей машиной, включенная в рабочую машину) или компьютерный программный продукт. Соответственно, некоторые варианты осуществления могут быть реализованы полностью как аппаратные средства, полностью как программное обеспечение (включающее в себя микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или как сочетание аспектов программного обеспечения и аппаратных средств (и других). Кроме того, некоторые варианты осуществления могут принимать форму компьютерного программного продукта на компьютерно-используемом носителе хранения информации, имеющем компьютерно-используемый программный код, осуществленный на носителе.
[140] Может быть использован любой подходящий компьютерно-используемый или компьютерно-читаемый носитель. Компьютерно-используемый носитель может быть компьютерно-читаемой средой распространения сигнала или компьютерно-читаемым носителем хранения информации. Компьютерно-используемый, или компьютерно-читаемый, носитель хранения информации (включающий в себя запоминающее устройство, связанное с вычислительным устройством или клиентским электронным устройством) может быть, например, но не только, электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой, прибором или устройством или любым подходящим сочетанием вышеописанного. Более конкретные примеры (неисчерпывающий список) компьютерно-читаемого носителя будут включать в себя следующее: электрическое соединение, имеющее один или более проводов, переносную компьютерную дискету, жесткий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флэш-память), оптическое волокно, постоянное запоминающее устройство на переносном компакт-диске (CD-ROM), оптическое запоминающее устройство. В контексте этого документа, компьютерно-используемый, или компьютерно-читаемый, носитель хранения информации может быть любым материальным носителем, который может содержать или хранить программу для использования посредством или в соединении с системой выполнения инструкций, прибором или устройством.
[141] Компьютерно-читаемая среда распространения сигнала может включать в себя распространяемый информационный сигнал со считываемым компьютером программным кодом, осуществленным в нем, например, в основной полосе частот или как часть несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, включающих в себя, но не только, электромагнитную, оптическую или любое их подходящее сочетание. Компьютерно-читаемая среда распространения сигнала может быть энергонезависимой и может быть любой компьютерно-читаемой средой, которая не является компьютерно-читаемым носителем хранения информации и которая может сообщать, распространять или переносить программу для использования посредством или в соединении с системой исполнения инструкций, прибором или устройством.
[142] Когда используются в данном документе, если иначе не ограничено или модифицировано, списки с элементами, которые разделяются конъюнктивными выражениями (например, "и") и которым также предшествует фраза "один или более из" или "по меньшей мере, один из", указывают конфигурации или компоновки, которые потенциально включают в себя индивидуальные элементы списка или любое их сочетание. Например, "по меньшей мере, один из A, B и C" или "один или более из A, B и C" указывают возможности только A, только B, только C или любого сочетания двух или более из A, B и C (например, A и B; B и C; A и C; или A, B и C).
[143] Когда используется в данном документе, термин "модуль" ссылается на любые аппаратные средства, программное обеспечение, микропрограммное обеспечение, электронный компонент управления, логику обработки и/или процессорное устройство, индивидуально или в любом сочетании, включающем в себя без ограничения: специализированную интегральную схему (ASIC), электронную схему, процессор (совместно используемый, специализированный или группу) и память, которая выполняет одну или более программ системы программного обеспечения или микропрограммного обеспечения, комбинационную логическую схему и/или другие подходящие компоненты, которые обеспечивают описанную функциональность.
[144] Варианты осуществления настоящего изобретения могут быть описаны в данном документе с точки зрения компонентов функциональных и/или логических блоков и различных этапов обработки. Должно быть понятно, что такие компоненты блоков могут быть реализованы любым числом аппаратных, программных и/или программно-аппаратных компонентов, выполненных с возможностью выполнять указанные функции. Например, вариант осуществления настоящего изобретения может применять различные компоненты интегральных схем, например, элементы памяти, элементы цифровой обработки сигналов, логические элементы, поисковые таблицы или т.п., которые могут выполнять множество функций под управлением одного или более микропроцессоров или других устройств управления. Кроме того, специалисты в области техники признают, что варианты осуществления настоящего изобретения могут быть применены на практике вместе с любым числом рабочих транспортных средств.
[145] Ради краткости, обычные технологии, относящиеся к обработке сигналов, передаче данных, сигнализации, управлению и другим функциональным аспектам систем (и индивидуальных работающих компонентов систем), могут не быть описаны подробно в данном документе. Кроме того, соединяющие линии, показанные на различных чертежах, содержащихся в данном документе, предназначены, чтобы представлять примерные функциональные связи и/или физические соединения между различными элементами. Следует отметить, что многие альтернативные или дополнительные функциональные соотношения или физические соединения могут присутствовать в варианте осуществления настоящего изобретения.
[146] Аспекты некоторых вариантов осуществления, которые описываются в данном документе, могут быть описаны со ссылкой на иллюстрации блок-схем последовательности операций и/или блок-схемы способов, устройства (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Будет понятно, что каждый блок из каких-либо таких иллюстраций блок-схем последовательности операций и/или блок-схем, и сочетания блоков в таких иллюстрациях блок-схем последовательности операций и/или блок-схем, могут быть реализованы посредством компьютерных программных инструкций. Эти компьютерные программные инструкции могут быть предоставлены процессору компьютера общего назначения, специализированного компьютера или другому программируемому устройству обработки данных, чтобы создать машину, так что инструкции, которые выполняются через процессор компьютера или другое программируемое устройство обработки данных, создают средство для реализации функций/действий, указанных в блок-схеме последовательности операций и/или блоке или блоках блок-схемы.
[147] Эти компьютерные программные инструкции могут также быть сохранены компьютерно-читаемой памяти, которая может инструктировать компьютеру или другому программируемому устройству обработки данных функционировать конкретным образом, так что инструкции, сохраненные в компьютерно-читаемой памяти, создают предмет производства, включающий в себя инструкции, которые реализуют функцию/действие, указанную в блок-схеме последовательности операций и/или блоке или блоках блок-схемы.
[148] Компьютерные программные инструкции могут также быть загружены в компьютер или другое программируемое устройство обработки данных, чтобы инструктировать выполнение последовательности операционных этапов на компьютере или другом программируемом устройстве, чтобы создать выполняемый компьютером процесс, так что инструкции, которые выполняются на компьютере или другом программируемом устройстве, предусматривают этапы реализации функций/действий, указанных в блок-схеме последовательности операций и/или блоке или блоках блок-схемы.
[149] Любая блок-схема последовательности операций и блок-схемы на чертежах, или аналогичное обсуждение выше, могут иллюстрировать архитектуру, функциональность и работу возможных реализаций систем, способов и компьютерных программных продуктов согласно различным вариантам осуществления настоящего изобретения. В этом отношении, каждый блок в блок-схеме последовательности операций или блок-схемах может представлять модуль, сегмент, или часть кода, который содержит одну или более исполняемых инструкций для реализации указанной логической функции(ий). Следует также отметить, что в некоторых альтернативных реализациях функции, отмеченные в блоке (или иначе описанные в данном документе), могут происходить вне порядка, отмеченного на чертежах. Например, два блока, показанных последовательно (или две операции, описанные последовательно), могут, в действительности, исполняться, по существу, одновременно, или блоки (или операции) могут иногда исполняться в обратном порядке, в зависимости от подразумеваемой функциональности. Также будет отмечено, что каждый блок какой-либо иллюстрации блок-схемы и/или блок-схемы последовательности операций, и сочетания блоков в каких-либо иллюстрациях блок-схем и/или блок-схемы последовательности операций, могут быть реализованы посредством специализированных аппаратных систем, которые выполняют указанные функции или действия, или сочетаний специализированных аппаратных средств и компьютерных инструкций.
[150] Терминология, используемая в данном документе, служит только для цели описания конкретных вариантов осуществления и не предназначена ограничивать изобретение. Как используются в данном документе, указание единственности элементов не исключает также и множественности, если контекст явно не диктует иное. Будет дополнительно понятно, что термины "содержит" и/или "содержащий", когда используются в этом описании, указывают наличие изложенных признаков, целых частей, этапов, операций, элементов и/или компонентов, но не препятствуют наличию или добавлению одного или более других признаков, целых частей, этапов, операций, элементов, компонентов и/или их групп.
[151] Описание настоящего изобретения было представлено в целях иллюстрации и описания, но не предназначено быть исчерпывающим или ограниченным изобретением в раскрытой форме. Множество модификаций и разновидностей будут очевидны обычным специалистам в области техники без отступления от рамок и духа изобретения. Явно упомянутые варианты осуществления в данном документе были выбраны и описаны для того, чтобы наилучшим образом объяснять принципы изобретения и его практическое применение и предоставлять возможность другим обычным специалистам в области техники понимать изобретение и распознавать множество альтернатив, модификаций и разновидностей по описанному примеру(ам). Соответственно, различные варианты осуществления и реализации, отличные от явно описанных, находятся в рамках последующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ЗАПУСКА РАБОЧЕГО ТРАНСПОРТНОГО СРЕДСТВА С ВИРТУАЛЬНЫМ ОБЩИМ ОСМОТРОМ ДЛЯ АВТОРИЗАЦИИ ДИСТАНЦИОННОГО ЗАПУСКА | 2017 |
|
RU2671454C1 |
| СИСТЕМА И СПОСОБ ЗАПУСКА РАБОЧЕГО ТРАНСПОРТНОГО СРЕДСТВА С ЦИКЛИЧЕСКОЙ РАБОТОЙ ДВИГАТЕЛЯ | 2017 |
|
RU2735117C2 |
| СПОСОБ И СИСТЕМА ЗАЩИЩЕННОГО ДИСТАНЦИОННОГО ЗАПУСКА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2668139C2 |
| СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ УПРАВЛЕНИЯ ЗАПУСКОМ И ОСТАНОВКОЙ ДВИГАТЕЛЯ | 2015 |
|
RU2657239C2 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2631764C2 |
| СИСТЕМА ДИСТАНЦИОННОГО ЗАПУСКА, ЦЕНТРАЛЬНЫЙ СЕРВЕР И ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2677776C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОБРАЗОВАНИЯ КОНДЕНСАТА НА СТЕКЛАХ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2684250C2 |
| Способ (варианты) и система для запуска двигателя | 2014 |
|
RU2655427C2 |
| СИСТЕМА ДВИГАТЕЛЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2013 |
|
RU2653456C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОСТАНОВКИ И АВТОМАТИЧЕСКОГО ЗАПУСКА ДВИГАТЕЛЯ | 2012 |
|
RU2576642C2 |
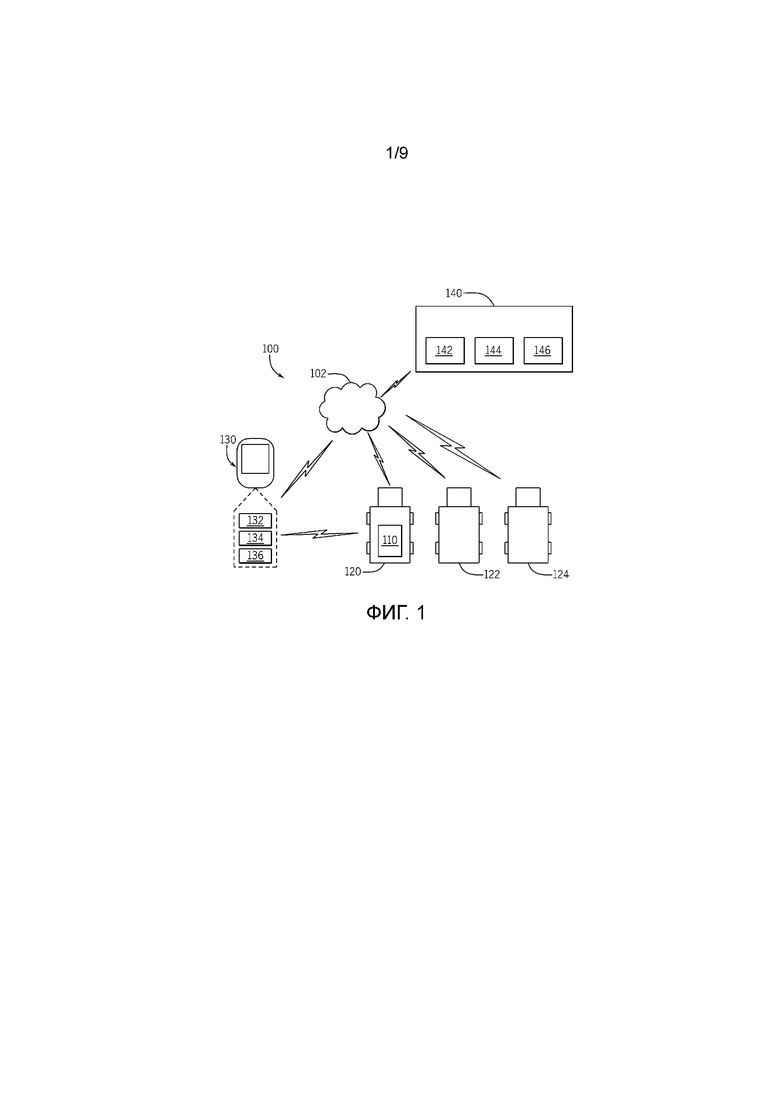
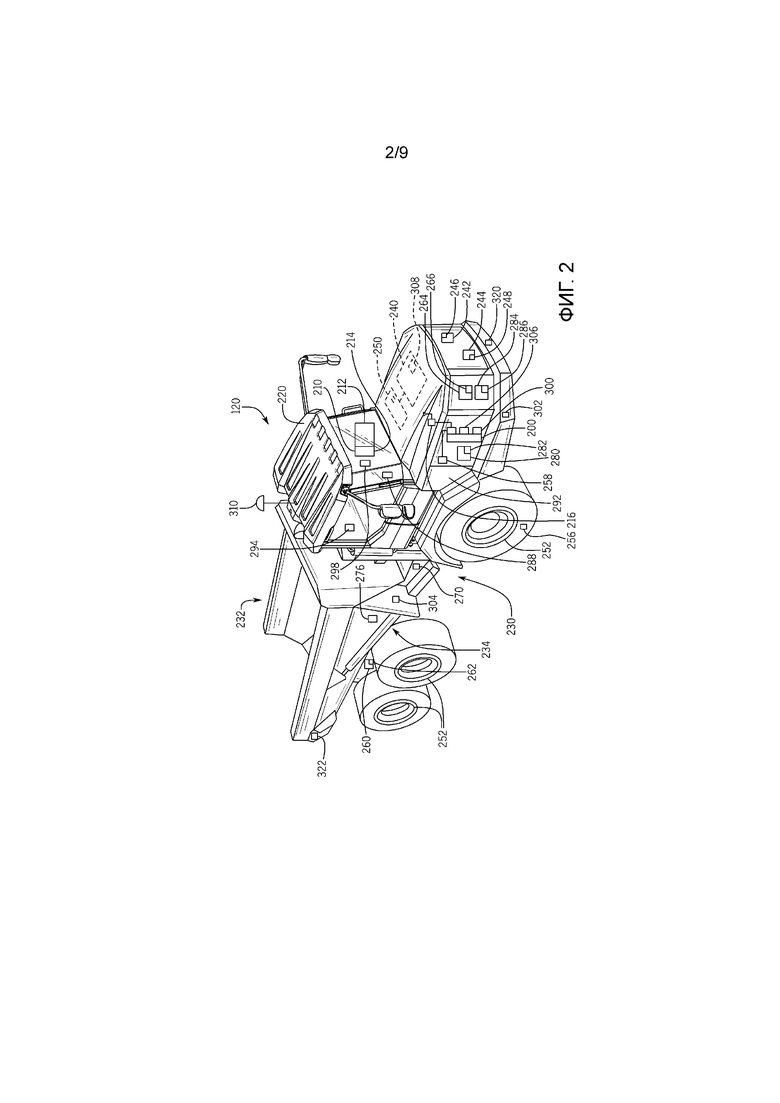
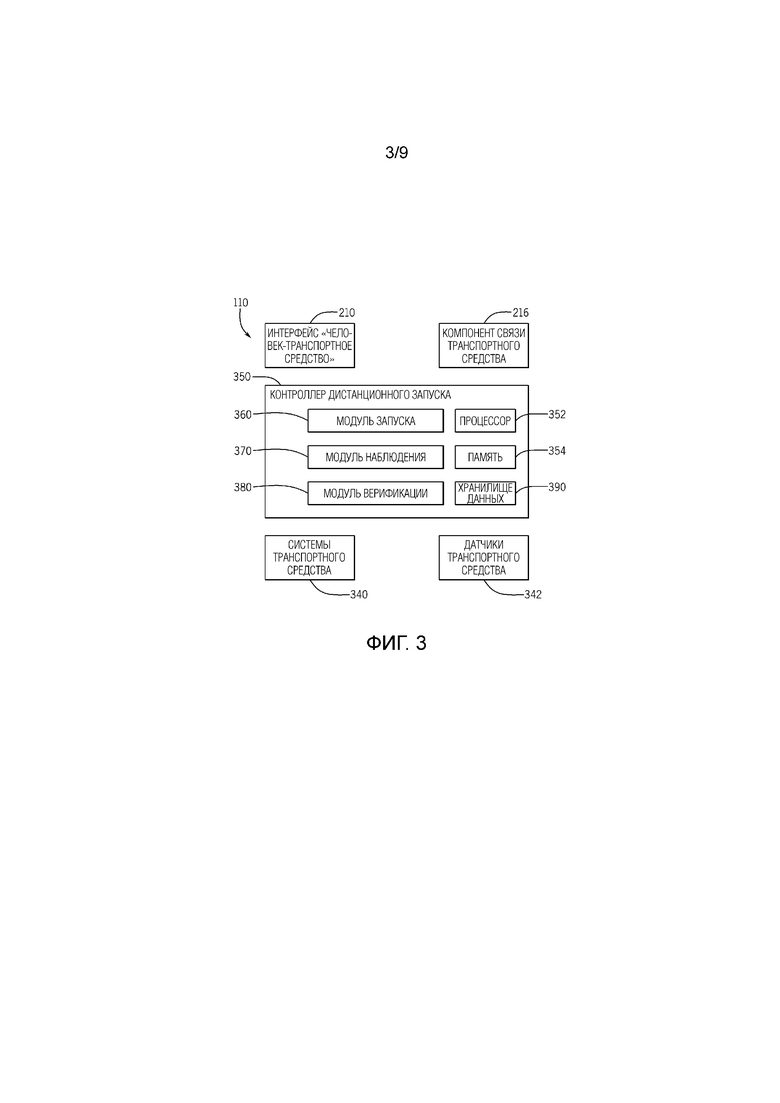
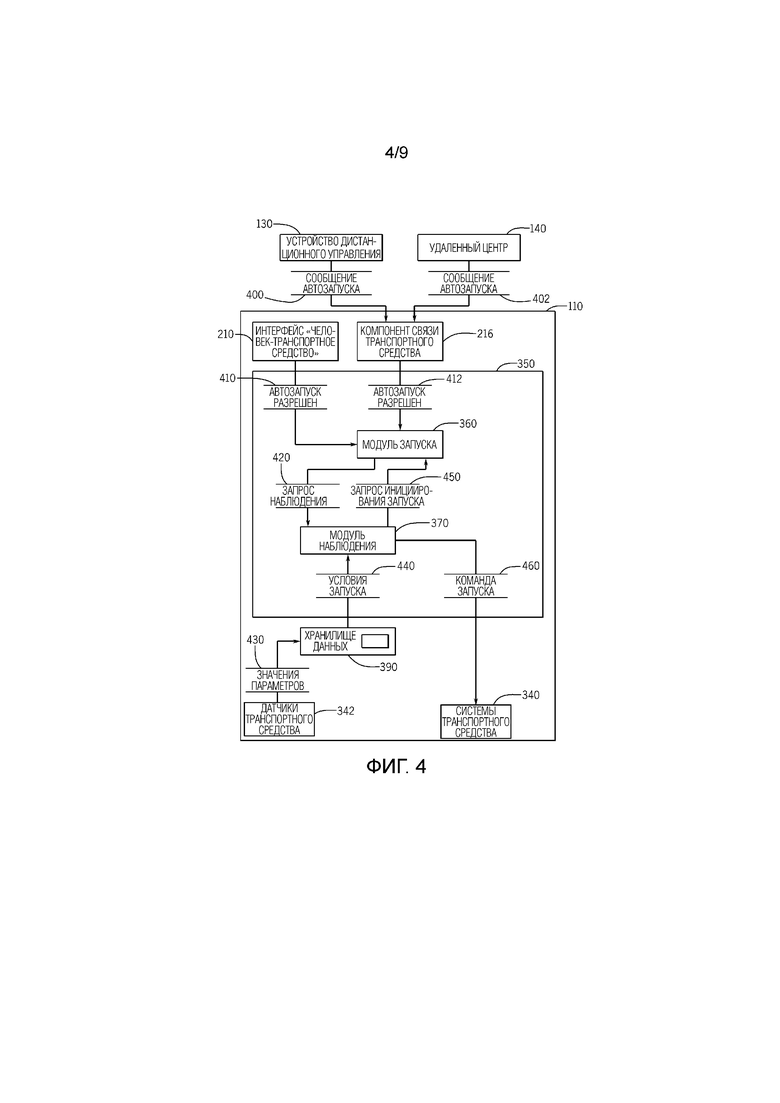
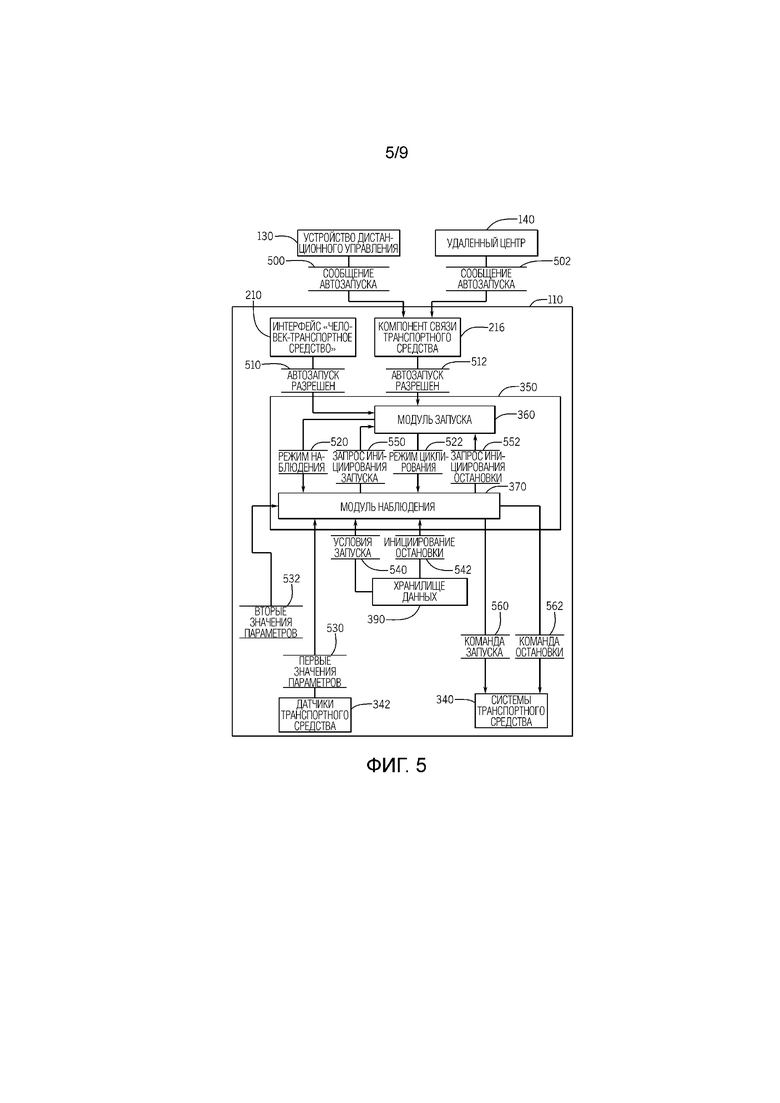
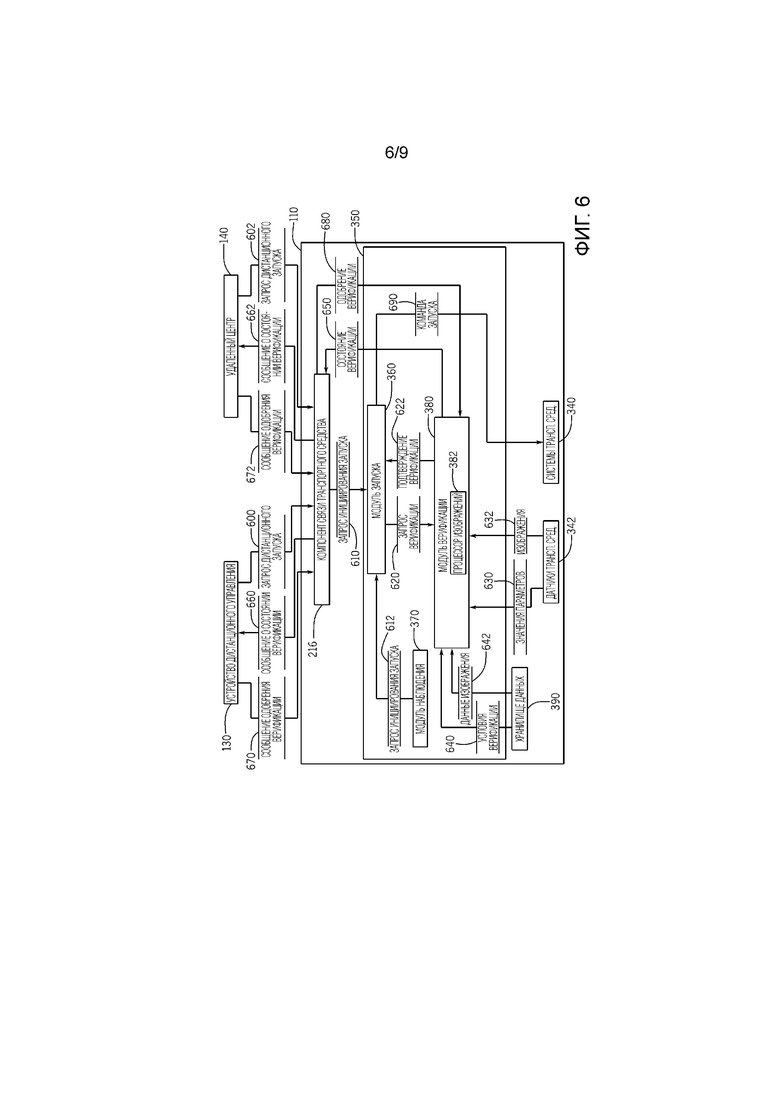
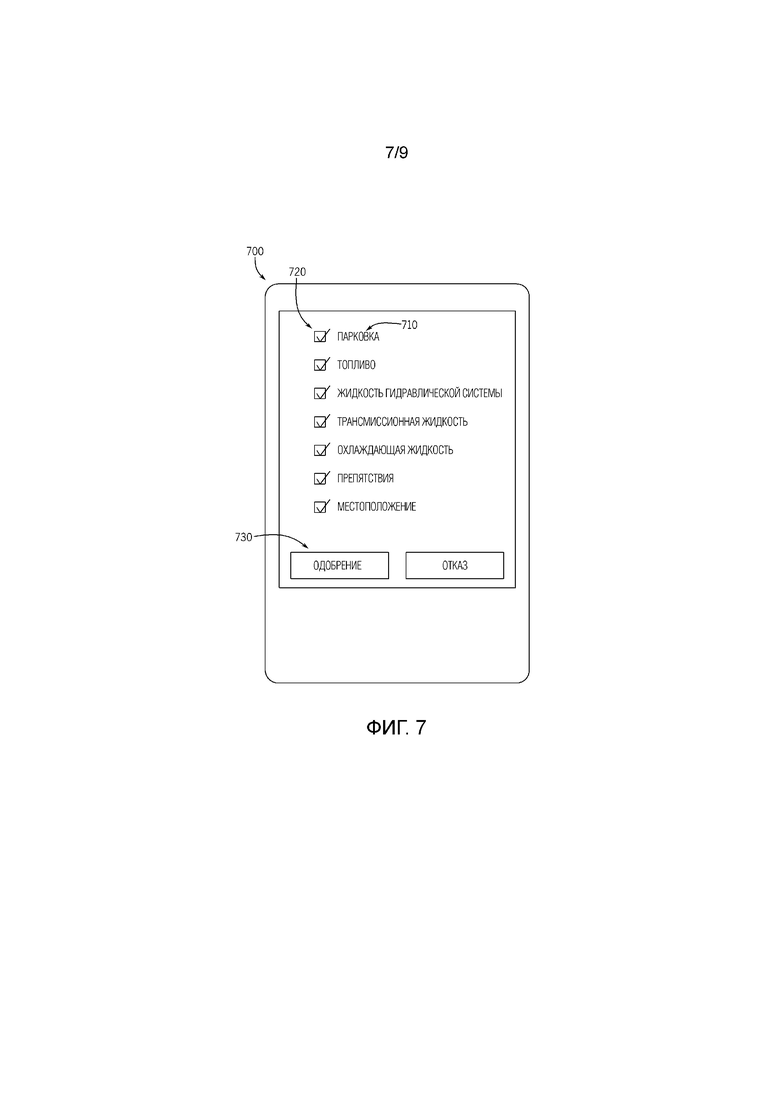
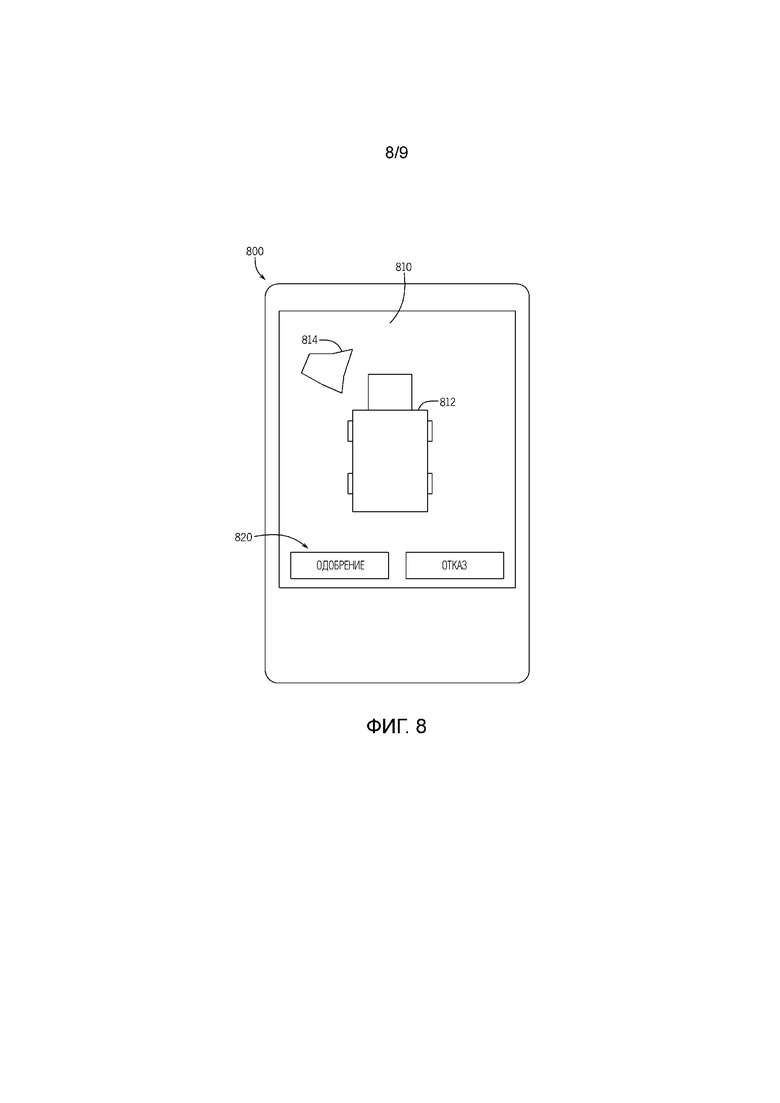
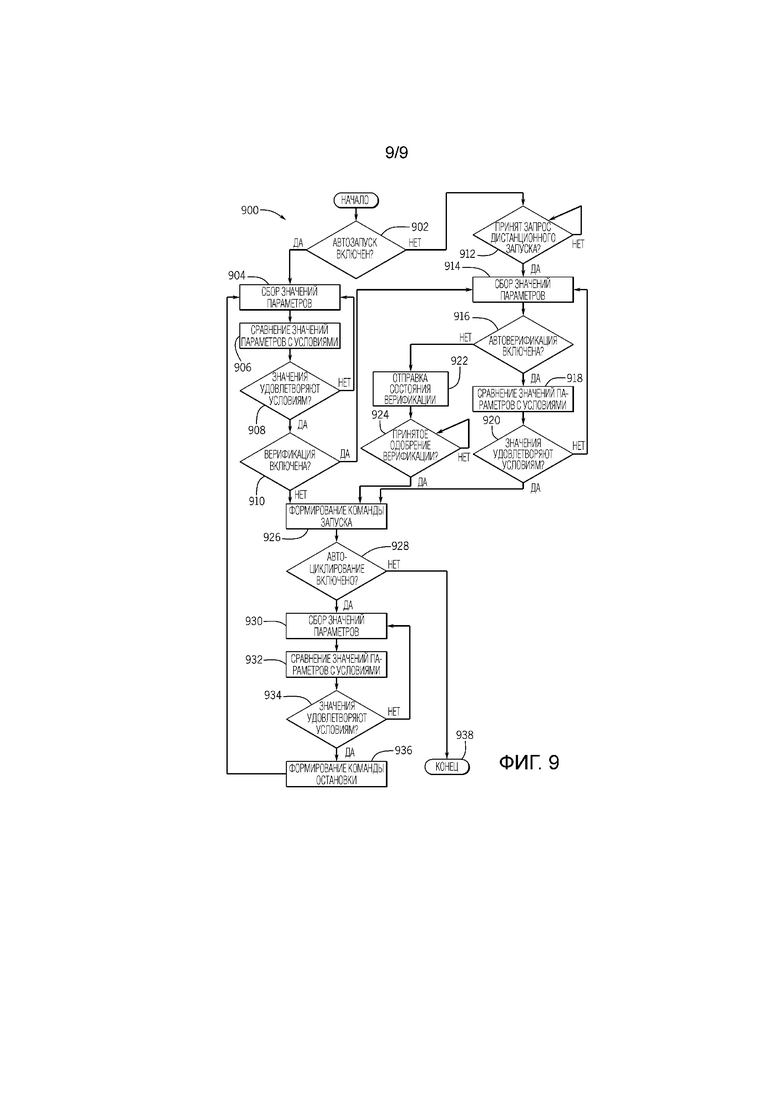
Изобретение относится к рабочим транспортным средствам. Система дистанционного запуска для рабочего транспортного средства содержит блок связи, оптические датчики, предоставляющие изображение части рабочего транспортного средства или его окружения и соединенный с ними контроллер, содержащий модуль запуска и модуль верификации. Модуль запуска формирует запрос верификации в ответ на входной сигнал дистанционного запуска. В ответ на запрос верификации модуль верификации подтверждает, что первое изображение удовлетворяет условию верификации и формирует подтверждение верификации, когда первое изображение удовлетворяет условию верификации. Модуль запуска формирует команду запуска в ответ на подтверждение верификации. Соединенное с контроллером пусковое устройство активирует первичный двигатель транспортного средства при приеме команды запуска от контроллера. Уменьшаются задержки в работе. 2 н. и 18 з.п. ф-лы, 9 ил.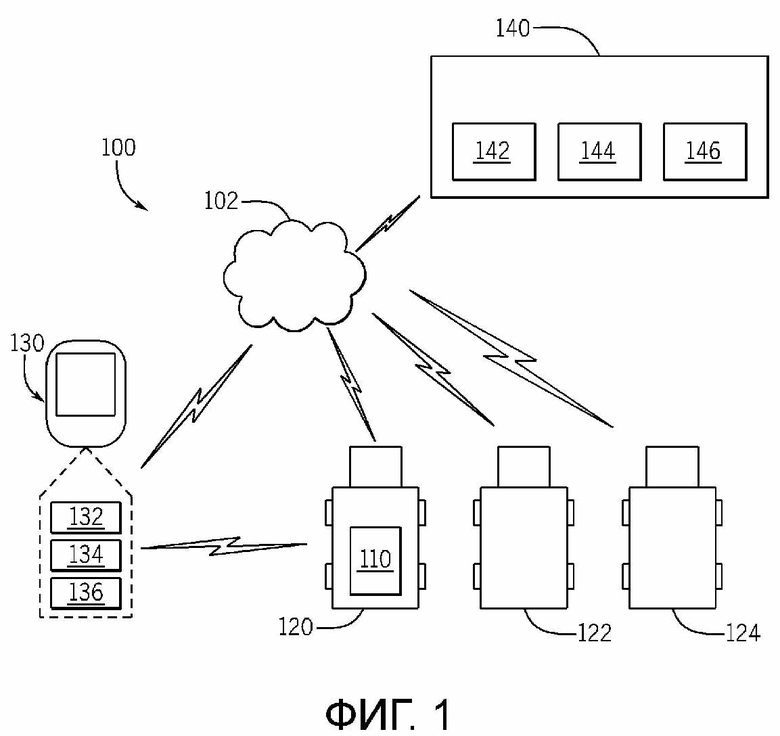
1. Система дистанционного запуска для рабочего транспортного средства, содержащая:
блок связи, выполненный с возможностью принимать входной сигнал дистанционного запуска;
один или более оптических датчиков, предоставляющих, по меньшей мере, первое изображение, по меньшей мере, части рабочего транспортного средства или окружения рабочего транспортного средства;
контроллер, с архитектурой памяти и обработки для исполнения алгоритмов управления транспортным средством, соединенный с блоком связи и одним или более оптическими датчиками, контроллер содержит, по меньшей мере, модуль запуска и модуль верификации, и
при этом модуль запуска выполнен с возможностью формировать запрос верификации в ответ на входной сигнал дистанционного запуска,
при этом, в ответ на запрос верификации, модуль верификации выполнен с возможностью подтверждать, что первое изображение удовлетворяет условию верификации, и формировать подтверждение верификации, когда первое изображение удовлетворяет условию верификации, и
при этом модуль запуска выполнен с возможностью формировать команду запуска в ответ на подтверждение верификации; и
пусковое устройство, соединенное с контроллером и выполненное с возможностью активировать первичный двигатель рабочего транспортного средства при приеме команды запуска от контроллера.
2. Система дистанционного запуска по п. 1, в которой модуль верификации выполнен с возможностью подтверждать, что первое изображение удовлетворяет условию верификации, оценивая первое изображение с помощью распознавания изображения.
3. Система дистанционного запуска по п. 1, в которой модуль верификации выполнен с возможностью подтверждать, что первое изображение удовлетворяет условию верификации, сравнивая первое изображение с допустимым изображением.
4. Система дистанционного запуска по п. 1, в которой модуль верификации выполнен с возможностью подтверждать, что первое изображение удовлетворяет условию верификации, оценивая первое изображение на предмет окружающих препятствий.
5. Система дистанционного запуска по п. 1, в которой модуль верификации выполнен с возможностью подтверждать, что первое изображение удовлетворяет условию верификации, оценивая первое изображение на предмет состояния оборудования.
6. Система дистанционного запуска по п. 1, в которой модуль верификации выполнен с возможностью отправлять изображение удаленному пользователю через блок связи в качестве состояния верификации.
7. Система дистанционного запуска по п. 6, в которой блок связи выполнен с возможностью принимать одобрение верификации от удаленного пользователя, и в которой модуль верификации выполнен с возможностью формировать подтверждение верификации при приеме одобрения верификации.
8. Система дистанционного запуска по п. 6, в которой модуль верификации выполнен с возможностью формировать состояние верификации для воспроизведения на устройстве удаленного пользователя и принимать одобрение верификации от устройства удаленного пользователя при одобрении состояния верификации.
9. Система дистанционного запуска по п. 1, в которой модуль верификации, при приеме запроса верификации, выполнен с возможностью активировать электрическую систему рабочего транспортного средства, чтобы питать оптический датчик и инициировать захват изображения посредством одного или более оптических датчиков.
10. Система дистанционного запуска по п. 9, в которой модуль верификации дополнительно выполнен с возможностью активировать систему освещения, чтобы освещать часть рабочего транспортного средства или окружение рабочего транспортного средства.
11. Система дистанционного запуска по п. 1, в которой оптический датчик размещается на рабочем транспортном средстве, чтобы захватывать вид сверху рабочего транспортного средства в качестве первого изображения.
12. Система дистанционного запуска по п. 1, в которой модуль запуска и модуль верификации размещаются на борту рабочего транспортного средства.
13. Система дистанционного запуска по п. 1, в которой, по меньшей мере, один из модуля запуска или модуля верификации является удаленным относительно рабочего транспортного средства.
14. Способ дистанционного запуска для рабочего транспортного средства, содержащий этапы, на которых:
принимают, посредством блока связи, входной сигнал дистанционного запуска;
захватывают, посредством оптического датчика, изображение, которое включает в себя, по меньшей мере, часть рабочего транспортного средства или окружение рабочего транспортного средства;
подтверждают, посредством контроллера, что изображение удовлетворяет условию верификации, в ответ на входной сигнал дистанционного запуска;
формируют, посредством контроллера, команду запуска, когда изображение удовлетворяет условию верификации; и
активируют, посредством пускового устройства, первичный двигатель рабочего транспортного средства в ответ на команду запуска.
15. Способ дистанционного запуска по п. 14, в котором этап подтверждения включает в себя этап, на котором оценивают изображение с помощью распознавания изображения.
16. Способ дистанционного запуска по п. 14, в котором этап подтверждения включает в себя этап, на котором оценивают изображение на предмет состояния оборудования.
17. Способ дистанционного запуска по п. 14, в котором этап подтверждения включает в себя этап, на котором отправляют изображение удаленному пользователю через блок связи и принимают одобрение изображения от удаленного пользователя, чтобы удовлетворять условию верификации.
18. Способ дистанционного запуска по п. 14, дополнительно содержащий этап, на котором:
активируют, посредством контроллера при приеме входного сигнала дистанционного запуска, электрическую систему рабочего транспортного средства, чтобы питать оптический датчик и инициировать захват изображения посредством оптического датчика.
19. Способ дистанционного запуска по п. 18, дополнительно содержащий этап, на котором:
активируют, посредством контроллера при приеме входного сигнала дистанционного запуска, систему освещения, чтобы освещать часть рабочего транспортного средства или окружение рабочего транспортного средства.
20. Способ дистанционного запуска по п. 15, в котором этап захвата включает в себя этап, на котором захватывают изображение как изображение сверху рабочего транспортного средства.
| US 6937141 B2, 30.08.2005 | |||
| US 7283810 B1, 16.10.2007 | |||
| CN 2884751 Y, 28.03.2007 | |||
| CN 102722721 А, 10.10.2012 | |||
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ, СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА | 2012 |
|
RU2611121C2 |
| FR 3017354 А1, 14.08.2015. | |||

