Область техники, к которой относится изобретение
Изобретение относится к оборудованию для транспортных средств, в частности, к системам для автоматического управления запуском и остановкой двигателя.
Уровень техники
Выключение двигателя транспортного средства, когда оно должно остановиться, может снизить расход топлива и уровень выбросов. В идеальном случае двигатель должен быть снова запущен до подачи водителем запроса на мощность. Для прогнозирования запроса мощности от водителя можно использовать либо нажатие водителем на педаль газа (для транспортных средств с автоматической коробкой передач), либо включение сцепления и использование водителем рычага переключения передач (для транспортных средств с ручной коробкой передач). Повторный запуск двигателя до фактического запроса мощности позволяет достичь баланса между высокой скоростью реагирования на выдачу водителем запроса мощности и обеспечением увеличения экономии топлива и снижения выбросов по сравнению с транспортными средствами, в которых двигатель непрерывно работает во время эксплуатации транспортного средства.
Раскрытие изобретения
Предложена система транспортного средства для управления запуском и остановкой двигателя, которая включает в себя по крайней мере один датчик, выполненный с возможностью выдачи сигнала о расстоянии, который соответствует дистанции между оборудованным транспортным средством и впереди идущим транспортным средством, и сигнала о скорости изменения расстояния, который соответствует скорости изменения расстояния до впереди идущего транспортного средства относительно оборудованного транспортного средства, а также устройство обработки, выполненное с возможностью выдачи управляющего сигнала на основании сигнала о расстоянии и сигнала о скорости изменения расстояния, где управляющий сигнал инициирует запуск двигателя оборудованного транспортного средства.
Устройство обработки может быть выполнено с возможностью анализа перемещения впереди идущего транспортного средства относительно оборудованного транспортного средства на основании сигнала о расстоянии и сигнала о скорости изменения расстояния.
Устройство обработки может быть выполнено с возможностью выдачи управляющего сигнала в том случае, если перемещение впереди идущего транспортного средства превышает заранее заданное пороговое значение.
Устройство обработки может быть выполнено с возможностью прогнозирования запроса мощности оборудованного транспортного средства на основании перемещения впереди идущего транспортного средства.
Устройство обработки может быть выполнено с возможностью до начала анализа перемещения впереди идущего транспортного средства проверять, остановилось ли оборудованное транспортное средство, и остановилось ли впереди идущее транспортное средство.
Система также может включать в себя контроллер двигателя, выполненный с возможностью запускать двигатель при получении управляющего сигнала.
Устройство обработки может быть выполнено с возможностью проверять, остановилось ли впереди идущее транспортное средство.
Устройство обработки может быть выполнено с возможностью проверять, остановилось ли оборудованное транспортное средство.
Устройство обработки может быть выполнено с возможностью проверять, выключен ли двигатель оборудованного транспортного средства.
В другом аспекте изобретения предложен способ управления запуском и остановкой двигателя, в котором:
принимают сигнал о расстоянии, соответствующий дистанции между оборудованным транспортным средством и впереди идущим транспортным средством;
принимают сигнал о скорости изменения расстояния, соответствующего информации о скорости изменения расстояния впереди идущего транспортного средства относительно оборудованного транспортного средства;
анализируют перемещение впереди идущего транспортного средства относительно оборудованного транспортного средства на основании сигнала о расстоянии и сигнала о скорости изменения расстояния;
выдают управляющий сигнал для инициирования запуска двигателя оборудованного транспортного средства, если впереди идущее транспортное средство, начинает отдаляться от оборудованного транспортного средства.
Управляющий сигнал выдают в том случае, если перемещение впереди идущего транспортного средства превышает заранее заданное пороговое значение.
При получении управляющего сигнала запускают двигатель оборудованного транспортного средства.
Дополнительно можно проверять, остановилось ли впереди идущее транспортное средство.
Дополнительно можно проверять, остановилось ли оборудованное транспортное средство.
Неподвижность оборудованного транспортного средства и впереди идущего транспортного средства проверяют до начала анализа перемещения впереди идущего транспортного средства.
Также проверяют, выключен ли двигатель оборудованного транспортного средства, причем управляющий сигнал выдают в том случае, если двигатель оборудованного транспортного средства выключен.
Сигнал о расстоянии и сигнал о скорости изменения расстояния принимают от по крайней мере одного датчика в оборудованном транспортном средстве.
В еще одном аспекте изобретения рассматривается оборудованное транспортное средство с двигателем и по крайней мере одним датчиком, выполненным с возможностью обнаружения впереди идущего транспортного средства, и выдачи сигнала о расстоянии, соответствующего дистанции до впереди идущего транспортного средства, и сигнала о скорости изменения расстояния, содержащего информацию о скорости изменения расстояния от впереди идущего транспортного средства до оборудованного транспортного средства. Транспортное средство также содержит устройство обработки, выполненное с возможностью анализа перемещения впереди идущего транспортного средства относительно оборудованного транспортного средства на основании сигнала о расстоянии и сигнала о скорости изменения расстояния, а также с возможностью выдавать управляющий сигнал, если перемещение впереди идущего транспортного средства превысит заранее заданное пороговое значение. Транспортное средство также содержит контроллер двигателя, выполненный с возможностью запускать двигатель при получении соответствующего управляющего сигнала.
Краткое описание чертежей
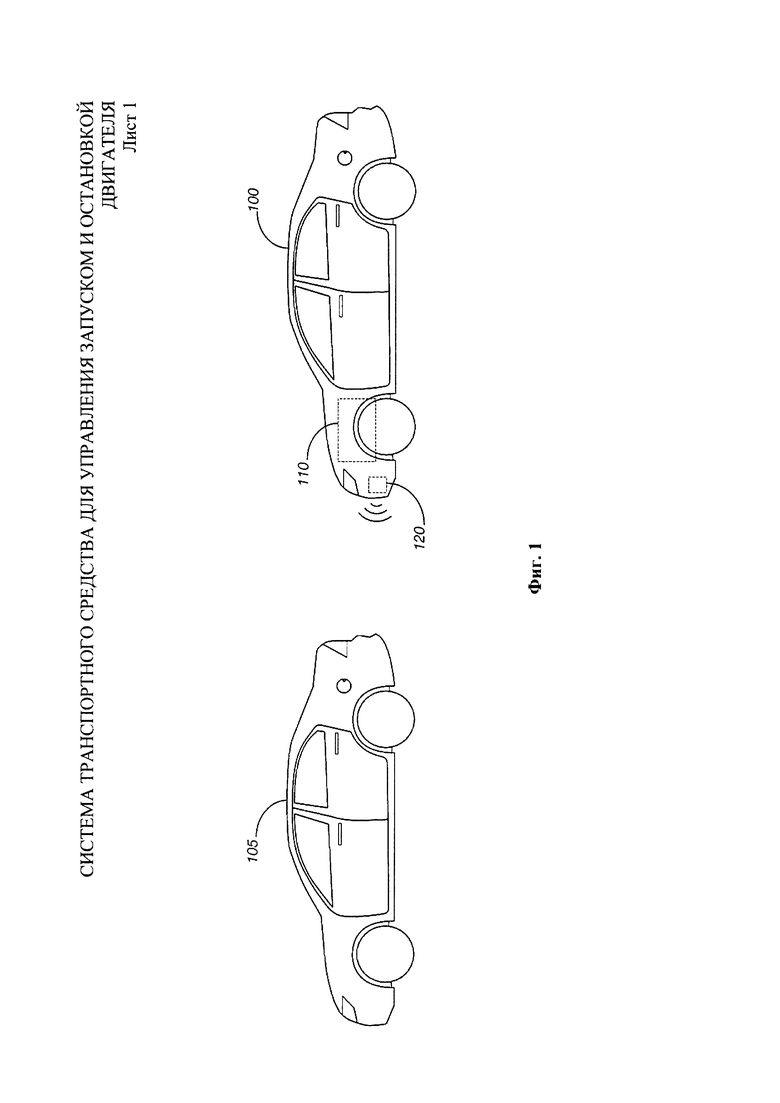
На Фиг. 1 представлено оборудованное транспортное средство, в котором установлена система прогнозирования подачи водителем запросов на мощность на основании движения впереди идущего транспортного средства.
На Фиг. 2 представлен пример системы запуска двигателя оборудованного транспортного средства для удовлетворения требования водителя на мощность.
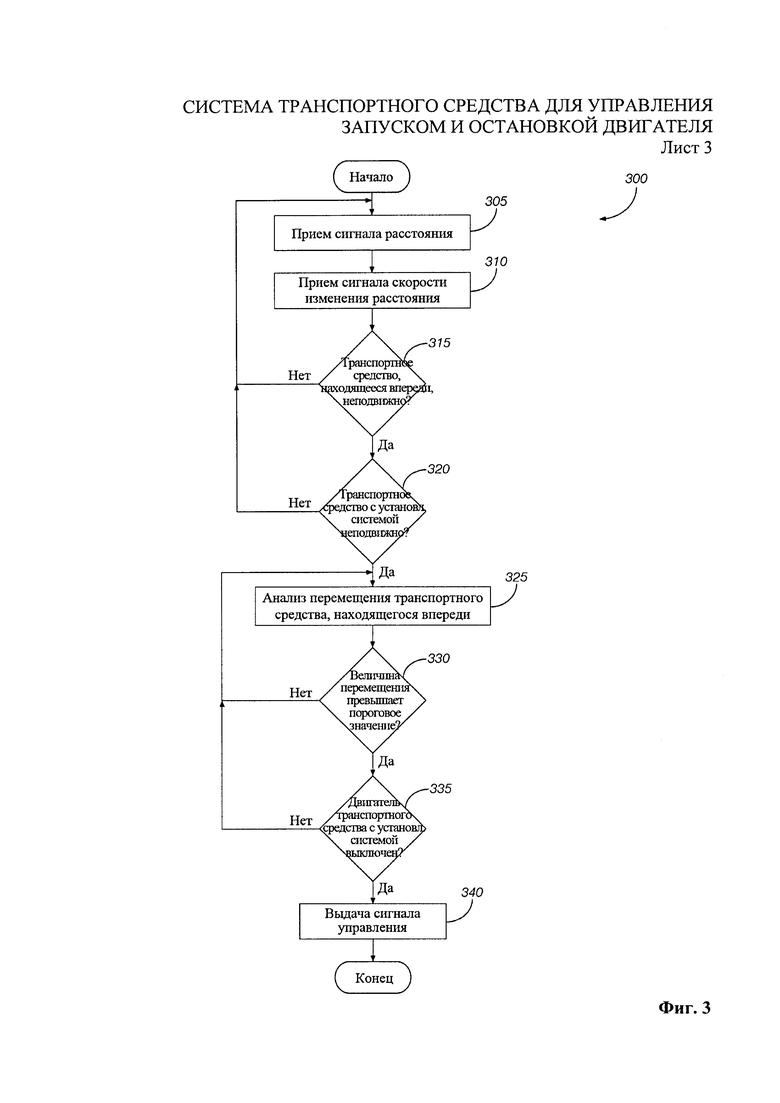
На Фиг. 3 представлена блок-схема примера процедуры, которая может быть использована одним или несколькими компонентами системы с Фиг. 2.
На Фиг. 4А представлен график, на котором показаны значения расстояния и скорости изменения расстояния, когда впереди идущее транспортное средство движется от оборудованного транспортного средства.
На Фиг. 4B представлен график, на котором показаны значения расстояния и скорости изменения расстояния для ситуации, когда впереди идущее транспортное средство сначала двигалось, а затем остановилось таким образом, что это не приводит к запуску двигателя оборудованного транспортного средства.
Осуществление изобретения
Пример системы транспортного средства включает в себя по крайней мере один датчик, выполненный с возможностью выдачи сигнала расстояния и сигнала скорости изменения расстояния. Сигнал расстояния соответствует дистанции между оборудованным транспортным средством и впереди идущим транспортным средством, а сигнал скорости изменения расстояния соответствует скорости изменения расстояния до впереди идущего транспортного средства относительно оборудованного транспортного средства. Устройство обработки выполнено с возможностью выдачи управляющего сигнала на основании сигнала расстояния и сигнала скорости изменения расстояния. Управляющий сигнал инициирует запуск двигателя оборудованного транспортного средства. При использовании такой системы двигатель оборудованного транспортного средства может быть выключен, когда оборудованное транспортное средство должно остановиться. Двигатель может оставаться выключенным до тех пор, пока впереди идущее транспортное средство не начнет отдаляться от оборудованного транспортного средства. Как показано ниже, система не анализирует все перемещения впереди идущего транспортного средства при его отдалении от оборудованного транспортного средства. Таким образом, система может учесть «ложные срабатывания», которые могут быть вызваны, например, тем, что впереди идущее транспортное средство движется вперед и затем останавливается через небольшое расстояние, например, из-за включения запрещающего сигнала светофора или при движении с частыми остановками в пробке.
Изображенная система может принимать различные формы и включать в себя дополнительные и/или альтернативные компоненты и системы. Хотя в примере представлена конкретная система, изображенные компоненты не должны рассматриваться как ограничения. На самом деле, могут быть использованы дополнительные или альтернативные компоненты и/или варианты воплощения.
На Фиг. 1 представлены оборудованное транспортное средство 100 и впереди идущее транспортное средство 105. Оборудованное транспортное средство 100 и впереди идущее транспортное средство 105 могут представлять собой любые пассажирские или коммерческие транспортные средства, в том числе легковые автомобили, грузовые автомобили, внедорожники, кроссоверы, тягачи с прицепом и т.п. Когда оба транспортных средства неподвижны, оборудованное транспортное средство 100 находится непосредственно за транспортным средством 105, и двигатель 110 оборудованного транспортного средства 100 может быть выключен. Остановившись, оборудованное транспортное средство 100 может контролировать перемещения транспортного средства 105. В этом случае для определения дистанции до транспортного средства 105 можно использовать один или несколько бортовых датчиков 120. Такая дистанция может относиться к «расстоянию» между транспортным средством 105 и транспортным средством 100. Этот же или другой датчик 120 также может определять скорость изменения расстояния до транспортного средства 105. Информация о скорости изменения расстояния может относиться к тому, как быстро транспортное средство 105 отдаляется от транспортного средства 100. Как будет подробно сказано ниже, двигатель 110 транспортного средства 100 может включаться после того, как расстояние и значение скорости изменения расстояния выйдут за заранее заданные пределы, которые могут задавать взаимосвязь между расстоянием и значением скорости изменения расстояния при обнаружении отдаления транспортного средства 105 от транспортного средства 100. Предварительное задание пределов может исключить «ложные срабатывания», которые в противном случае могут возникнуть в ситуации, когда транспортное средство 105 начинает двигаться, а затем снова останавливается (например, если водитель транспортного средства 105 ненадолго убирает свою ногу с педали тормоза, а затем повторно нажимает на нее для полной остановки транспортного средства 105). Таким образом, двигатель 110 оборудованного транспортного средства 100 в случае ложного срабатывания может оставаться выключенным, поддерживая низкий уровень расхода топлива и выбросов и игнорируя незначительное перемещение транспортного средства 105.
На Фиг. 2 изображена система 115, встроенная в оборудованное транспортное средство 100, которая предназначена для определения необходимости запуска двигателя 110 и которая включает в себя по крайней мере один датчик 120, контроллер 125 двигателя и устройство обработки 130.
Датчик 120 может представлять собой любое количество устройств, выполненных с возможностью генерирования сигналов, которые позволят оборудованному транспортному средству 100 обнаруживать одно или несколько других транспортных средств, в том числе впереди идущее транспортное средство 105. Датчики 120 могут представлять собой радиолокационный датчик, лазерный локатор, камеру и т.д. Датчик 120 может быть выполнен с возможностью выдачи сигнала о расстоянии на основании дистанции между оборудованным транспортным средством 100 и впереди идущим транспортным средством 105. Этот же или другой датчик 120 может быть выполнен с возможностью выдачи сигнала о скорости изменения расстояния на основании информации о скорости изменения расстояния для впереди идущего транспортного средства 105.
Контроллер 125 двигателя может быть выполнен с возможностью управления работой двигателя 110 и, возможно, других компонентов силовой передачи, в том числе работой коробки передач. Двигатель 110 может представлять собой двигатель 110 внутреннего сгорания, выполненный с возможностью преобразования энергии топлива, в том числе бензина, в механическое движение. Двигатель 110 может иметь одну или несколько камер сгорания для насыщения топлива кислородом. В камере сгорания происходит сжатие и воспламенение топлива, насыщенного кислородом. Сгорание в каждой камере может создавать силу, под действием которой движение поршня вращает вал. Двигатель 110 может иметь любое количество камер сгорания. Камеры сгорания могут находиться в блоке цилиндров, который также может закрывать поршни и вал, составляющие двигатель 110. Блок цилиндров может быть отлит, например, из железа, алюминиевого сплава или другого материала, который может передавать тепло охлаждающей жидкости двигателя, проходящей через блок цилиндров. Контроллер 125 двигателя может управлять продолжительностью горения, как было описано выше. Более того, контроллер 125 двигателя может быть выполнен с возможностью принимать входные сигналы от различных компонентов и/или подсистем транспортного средства 100.
Устройство обработки 130 может представлять собой любое количество устройств, выполненных с возможностью прогнозирования запроса мощности в транспортном средстве 100. Одним из способов прогнозирования запроса мощности является анализ движения транспортного средства 105, находящегося перед транспортным средством 100, и определение необходимости запуска двигателя 110 на основании расстояния, представленного в виде сигнала о расстоянии, и информации о скорости изменения расстояния, представленной в виде сигнала о скорости изменения расстояния. Если устройство обработки 130 определяет, что следует запустить двигатель 110, то оно может выдать управляющий сигнал, инициирующий запуск двигателя 110. Управляющий сигнал может быть направлен, например, на контроллер 125 двигателя. В альтернативном варианте использования устройство обработки 130 может быть встроено в контроллер 125 двигателя, т.е. контроллер 125 двигателя может принимать и обрабатывать сигналы о расстоянии и скорости изменения расстояния, а также определять на основании этих сигналов, нужно ли запускать двигатель 110. В соответствии с одним возможным подходом устройство обработки 130 может быть выполнено с возможностью сравнения перемещения впереди идущего транспортного средства 105, которое описывается с помощью информации о расстоянии и скорости изменения расстояния, с заранее заданными для них пределами (пороговыми значениями) и выдачи управляющего сигнала, инициирующего запуск двигателя 110, в том случае, если перемещение транспортного средства 105 превышает заранее заданные пределы.
Устройство обработки 130 может быть выполнено с возможностью исключения начальной дистанции (расстояния) торможения до запуска оценки перемещения транспортного средства 105. Уравнение 1, представленное ниже, описывает один из способов, который позволяет не учитывать начальное расстояние торможения

Заданные пределы расстояний можно сравнить со скоростью изменения расстояния и значением изменившегося расстояния, полученного из уравнения (1). В соответствии с примером, приведенным ниже, пороговое значение может соответствовать четверти окружности (уравнение (2))

Помимо прогнозирования запроса мощности транспортного средства 100 и анализа перемещения транспортного средства 105, устройство обработки 130 также может быть выполнено с возможностью проверять, произошла ли остановка транспортного средства 100 и/или транспортного средства 105. Устройство обработки 130 может определять с помощью датчика 120, например, датчика 120 системы глобального позиционирования (GPS) или спидометра, следует ли остановить транспортное средство 100. В качестве альтернативы устройство обработки 130 может получать измеренное значение скорости вращения колес или другое значение, соответствующее скорости движения транспортного средства 100. В некоторых случаях устройство обработки 130 может определять скорость транспортного средства 100 на основании одного или нескольких показаний датчика 120. Устройство обработки 130 может быть выполнено с возможностью обнаруживать остановки транспортного средства 105 на основании сигналов о расстоянии и/или скорости изменения расстояния, выдаваемых датчиками 120. Например, устройство обработки 130 может определять, что транспортное средство 105 остановилось, в том случае, если скорость изменения расстояния до транспортного средства 105 равна нулю, или если расстояние между транспортным средством 100 и транспортным средством 105 не меняется. В некоторых случаях до принятия решения о необходимости выключения или запуска двигателя 110 транспортного средства 100 устройство обработки 130 может определять, неподвижны ли транспортное средство 105 и транспортное средство 100. Более того, устройство обработки 130 до попытки прогнозирования любых запросов мощности может быть выполнено с возможностью определять, выключен ли двигатель 110 транспортного средства 100. Другими словами, устройство обработки 130 может анализировать перемещение транспортного средства 105, например, для определения необходимости запуска двигателя 110 транспортного средства 100, только в том случае, если двигатель 110 транспортного средства 100 выключен.
В общем случае такие вычислительные системы и/или устройства, как устройство обработки 130, могут использовать операционную систему, включая, но не ограничиваясь этим, версии и/или разновидности операционной системы Ford Sync®, операционной системы Microsoft Windows®; операционной системы Unix (например, операционной системы Solaris®, распространяемой компанией Oracle Corporation, г. Редвуд Шорз, Калифорния); операционной системы AIX UNIX, распространяемой компанией International Business Machines, г. Армонк, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc., г. Купертино, Калифорния, операционной системы BlackBerry, распространяемой компанией Research In Motion, г. Ватерлоо, Канада, и операционной системы Android, разработанной компанией Open Handset Alliance. Примеры вычислительных устройств включают в себя, не ограничиваясь этим, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный компьютер или карманный компьютер или некоторые другие вычислительные систему и/или устройство.
Вычислительные устройства включают в себя выполняемые компьютером инструкции, при этом данные инструкции могут быть выполнены одним или несколькими вычислительными устройствами, например, устройствами, перечисленными выше. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и/или технологий программирования, включая, но не ограничиваясь этим, языки Java, C, C++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства, машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, включая один или несколько процессов, приведенных в настоящем описании. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) включает в себя любые энергонезависимые носители (например, материальные носители), предоставляющие данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором вычислительного устройства). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основного запоминающего устройства. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включая провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
В некоторых примерах элементы системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д.). Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций.
На Фиг. 3 представлена блок-схема примера процесса 300, который может быть выполнен одним или несколькими компонентами системы 115 с Фиг. 2. Например, способ 300 может быть выполнен устройством обработки 130.
На этапе 305 устройство обработки 130 может принимать сигнал о расстоянии. Как было сказано выше, сигнал о расстоянии может быть сгенерирован одним или несколькими датчиками 120 и может содержать данные о дистанции между оборудованным транспортным средством 100 и впереди идущим транспортным средством 105. Кроме того, в некоторых случаях начальное расстояние может быть обнулено, чтобы определить изменение расстояния.
На этапе 310 устройство обработки 130 может принимать сигнал скорости изменения расстояния. Сигнал о скорости изменения расстояния может быть сгенерирован одним или несколькими датчиками 120 и может содержать информацию о скорости изменения расстояния до транспортного средства 105. В соответствии с одним примером информация о скорости изменения расстояния может включать в себя данные о том, как быстро транспортное средство 105 отдаляется от транспортного средства 100.
На этапе 315 принятия решения устройство обработки 130 может определять, неподвижно ли транспортное средство 105. Устройство обработки 130 может определять, неподвижно ли транспортное средство 105, на основании сигналов о расстоянии и/или скорости изменения расстояния, выдаваемых датчиками 120. Например, устройство обработки 130 может определять, что транспортное средство 105 остановилось, если скорость изменения расстояния до транспортного средства 105 равна нулю, или если расстояние между транспортным средством 100 и транспортным средством 105 не меняется. Если транспортное средство 105 неподвижно, процесс 300 может перейти на этап 320. В противном случае способ 300 может вернуться на этап 305.
На этапе 320 принятия решения устройство обработки 130 может определять, неподвижно ли транспортное средство 100. Например, устройство обработки 130 может использовать данные от датчика 120, например, от датчика 120 системы глобального позиционирования (GPS) или спидометра, для проверки, остановлено ли транспортное средство 100. В качестве альтернативы устройство обработки 130 может получать измеренное значение скорости вращения колес или другое значение, соответствующее скорости движения транспортного средства 100. В некоторых случаях устройство обработки 130 может определять скорость транспортного средства 100 на основании одного или нескольких показаний датчика 120. Если устройство обработки 130 определяет, что транспортное средство 100 неподвижно, способ 300 может перейти на этап 325. Если устройство обработки 130 определяет, что транспортное средство 100 продолжает движение, способ 300 может вернуться на этап 305.
На этапе 325 устройство обработки 130 может анализировать перемещение впереди идущего транспортного средства 105 относительно транспортного средства 100. Анализ перемещения может быть основан, по крайней мере частично, на дополнительных сигналах о расстоянии и скорости изменения расстояния, принятых после обнаружения на этапе 320 остановки транспортного средства 105. Как было сказано выше, увеличение расстояния (включая увеличение изменившегося расстояния) может указывать на то, что транспортное средство 105 отдаляется от транспортного средства 100. Информация о скорости изменения расстояния до транспортного средства 105 указывает, как быстро транспортное средство 105 отдаляется от транспортного средства 100. В данном случае информация о расстоянии (включая изменившееся расстояние) и скорости изменения расстояния может быть использована для анализа перемещения транспортного средства 105.
На этапе 330 принятия решения устройство обработки 130 может сравнивать перемещение транспортного средства 105 с заранее заданными пределами. Например, устройство обработки 130 может использовать уравнение (2) для определения того, указывают ли значения расстояния и скорости изменения расстояния на то, что транспортное средство 105 отдаляется от транспортного средства 100 таким образом, что возникает высокая вероятность того, что водитель транспортного средства 100 скоро выдаст запрос мощности. Таким образом, если перемещение транспортного средства 105 превышает заранее заданное пороговое значение, способ 300 может перейти на этап 335. Если перемещение транспортного средства 105, находящегося впереди, не превышает заранее заданное пороговое значение, способ 300 может вернуться на этап 325, где будет выполнен анализ дополнительных перемещений транспортного средства 105.
На этапе 335 принятия решения устройство обработки 130 может определять, выключен ли двигатель 110 транспортного средства 100. Двигатель 110 может не выключаться при каждой остановке транспортного средства 100. До выдачи на этапе 340 команды двигателю 110 на включение, устройство обработки 130 может сначала проверять, действительно ли выключен двигатель 110. Если двигатель выключен, способ 300 может перейти на этап 340. Если двигатель 110 продолжает работать, способ 300 может вернуться на этап 325.
На этапе 340 устройство обработки 130 может выдавать управляющий сигнал, инициирующий запуск двигателя 110 транспортного средства 100. Управляющий сигнал может быть направлен на контроллер 125 двигателя, который может запустить двигатель 110.
Способ 300 может завершаться после этапа 340. В качестве альтернативы способ 300 может возвращаться на этап 305 или, возможно, на другой этап после этапа 340.
На Фиг. 4А представлен график 400А, на котором показаны значения расстояния и скорости изменения расстояния, когда транспортное средство 105 отдаляется от транспортного средства 100. На Фиг. 4B представлен график 400B, на котором показаны значения расстояния и скорости изменения расстояния для ситуации, когда транспортное средство 105 сначала двигалось, а затем остановилось, в результате чего было определено, что двигатель 110 транспортного средства 100 следует оставить выключенным. На обоих графиках 400А и 400B значения расстояния представлены на оси Y, а значения скорости изменения расстояния - на оси X. Пороговое значение 405 показано пунктирной линией. Перемещение транспортного средства 105 может быть представлено на графиках 400А и 400B в виде функции зависимости от расстояния и скорости изменения расстояния. Перемещение, превышающее пороговое значение 405, как показано на Фиг. 4А, может инициировать запуск двигателя 110 транспортного средства 100. Перемещение, величина которого ниже порогового значения 405, например, перемещение, изображенное на Фиг. 4B, может привести к тому, что двигатель 110 останется выключенным, поскольку маловероятно, что водитель запросит мощность от двигателя 110 на основании незначительного перемещения транспортного средства 105.
В отношении описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, они могут быть выполнены в другой последовательности. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а также некоторые этапы могут быть добавлены или опущены. Другими словами, описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не рассматриваются как ограничение изобретения.
Таким образом, следует понимать, что описание приведено в целях наглядности, а не ограничения. Многие дополнительные варианты реализации и применения, отличные от показанных примеров, станут очевидны при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Предполагается и имеется в виду, что описываемые технологии могут быть развиты и усовершенствованы в будущем, причем раскрытые системы и способы будут включены в подобные будущие варианты реализации. Таким образом, следует понимать, что применение изобретения может быть изменено и модифицировано.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в данной области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ РЕГУЛИРОВАНИЯ ЕГО ДВИЖЕНИЯ В ТРАНСПОРТНОМ ПОТОКЕ | 2015 |
|
RU2658618C2 |
| СИСТЕМА КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ РАБОТЫ | 2015 |
|
RU2678416C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2017 |
|
RU2702934C1 |
| Система и способ экстренного торможения | 2020 |
|
RU2749616C1 |
| СИСТЕМА АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2582317C2 |
| СПОСОБ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570855C2 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2014 |
|
RU2659341C2 |
| СИСТЕМА И СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2015 |
|
RU2584372C1 |
| СИСТЕМА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2574042C1 |


Изобретение относится к системам управления двигателем для транспортных средств, в частности к системам для автоматического управления запуском и остановкой двигателя. Техническим результатом является увеличение экономии топлива и снижение выбросов. Результат достигается тем, что система транспортного средства для управления запуском и остановкой двигателя включает в себя по крайней мере один датчик, выполненный с возможностью выдачи сигнала о расстоянии и сигнала о скорости изменения расстояния. Сигнал о расстоянии соответствует дистанции между оборудованным транспортным средством и впереди идущим транспортным средством, а сигнал о скорости изменения расстояния соответствует скорости изменения расстояния до впереди идущего транспортного средства относительно оборудованного транспортного средства. Устройство обработки выполнено с возможностью выдавать управляющий сигнал на основании сигнала о расстоянии и сигнала о скорости изменения расстояния. Управляющий сигнал инициирует запуск двигателя оборудованного транспортного средства. 3 н. и 17 з.п. ф-лы, 5 ил.
1. Система транспортного средства для управления запуском и остановкой двигателя, которая включает в себя:
по меньшей мере один датчик, запрограммированный для выдачи сигнала о расстоянии, представляющего дистанцию от оборудованного транспортного средства до находящегося впереди транспортного средства, и сигнала о скорости изменения расстояния, представляющего информацию о скорости изменения расстояния до находящегося впереди транспортного средства относительно оборудованного транспортного средства,
устройство обработки, запрограммированное для выдачи управляющего сигнала на основании сигнала о расстоянии и сигнала о скорости изменения расстояния относительно заранее заданного набора пороговых значений, заданного как функция дистанции от оборудованного транспортного средства до находящегося впереди транспортного средства и упомянутой информации о скорости изменения расстояния, при этом управляющий сигнал инициирует запуск двигателя оборудованного транспортного средства.
2. Система транспортного средства по п. 1, в которой устройство обработки запрограммировано для оценки перемещения находящегося впереди транспортного средства относительно оборудованного транспортного средства на основании сигнала о расстоянии и сигнала о скорости изменения расстояния.
3. Система транспортного средства по п. 2, в которой устройство обработки запрограммировано для выдачи управляющего сигнала, если перемещение находящегося впереди транспортного средства превышает заранее заданный набор пороговых значений.
4. Система транспортного средства по п. 2, в которой устройство обработки запрограммировано для прогнозирования запроса мощности оборудованного транспортного средства на основании перемещения находящегося впереди транспортного средства.
5. Система транспортного средства по п. 2, в которой устройство обработки запрограммировано для определения, остановилось ли оборудованное транспортное средство и остановилось ли находящееся впереди транспортное средство, до оценки перемещения находящегося впереди транспортного средства.
6. Система транспортного средства по п. 1, дополнительно содержащая контроллер двигателя, выполненный с возможностью запуска двигателя оборудованного транспортного средства в ответ на прием управляющего сигнала.
7. Система транспортного средства по п. 1, в которой устройство обработки запрограммировано для определения, остановилось ли находящееся впереди транспортное средство.
8. Система транспортного средства по п. 1, в которой устройство обработки запрограммировано для определения, остановилось ли оборудованное транспортное средство.
9. Система транспортного средства по п. 1, в которой устройство обработки запрограммировано для определения, выключен ли двигатель оборудованного транспортного средства.
10. Способ управления запуском и остановкой двигателя, в котором:
принимают сигнал о расстоянии, представляющий дистанцию от оборудованного транспортного средства до находящегося впереди транспортного средства;
принимают сигнал о скорости изменения расстояния, представляющий информацию о скорости изменения расстояния до находящегося впереди транспортного средства относительно оборудованного транспортного средства, при этом информация о скорости изменения расстояния указывает, как быстро находящееся впереди транспортное средство перемещается относительно оборудованного транспортного средства;
оценивают перемещение находящегося впереди транспортного средства относительно оборудованного транспортного средства на основании заранее заданного набора пороговых значений, заданного как функция дистанции от оборудованного транспортного средства до находящегося впереди транспортного средства, заданная сигналом о расстоянии и информацией о скорости изменения расстояния, заданной сигналом о скорости изменения расстояния; и
выдают управляющий сигнал для инициирования запуска двигателя оборудованного транспортного средства, если находящееся впереди транспортное средство отдаляется от оборудованного транспортного средства.
11. Способ по п. 10, в котором управляющий сигнал выдают, если перемещение находящегося впереди транспортного средства, как задано сигналом о расстоянии и сигналом о скорости изменения расстояния, превышает заранее заданный набор пороговых значений.
12. Способ по п. 10, дополнительно содержащий этап, на котором запускают двигатель оборудованного транспортного средства в соответствии с управляющим сигналом.
13. Способ по п. 10, дополнительно содержащий этап, на котором определяют, остановилось ли находящееся впереди транспортное средство.
14. Способ по п. 13, дополнительно содержащий этап, на котором определяют, остановилось ли оборудованное транспортное средство.
15. Способ по п. 14, дополнительно содержащий этап, на котором определяют, остановилось ли оборудованное транспортное средство и остановилось ли находящееся впереди транспортное средство, до оценки перемещения находящегося впереди транспортного средства.
16. Способ по п. 10, дополнительно содержащий этап, на котором определяют, выключен ли двигатель оборудованного транспортного средства.
17. Способ по п. 16, в котором управляющий сигнал выводят, если двигатель оборудованного транспортного средства выключен.
18. Способ по п. 10, в котором сигнал о расстоянии и сигнал о скорости изменения расстояния принимают от по меньшей мере одного датчика, расположенного в оборудованном транспортном средстве.
19. Оборудованное транспортное средство, содержащее:
двигатель;
по меньшей мере один датчик, выполненный с возможностью обнаружения находящегося впереди транспортного средства и выдачи сигнала о расстоянии, представляющего дистанцию до находящегося впереди транспортного средства, и сигнала о скорости изменения расстояния, представляющего информацию о скорости изменения расстояния до находящегося впереди транспортного средства относительно оборудованного транспортного средства, при этом информация о скорости изменения расстояния указывает, как быстро находящееся впереди транспортное средство перемещается относительно оборудованного транспортного средства;
устройство обработки, запрограммированное для оценки перемещения находящегося впереди транспортного средства относительно оборудованного транспортного средства на основании сигнала о расстоянии и сигнала о скорости изменения расстояния, и выдачи управляющего сигнала, если перемещение находящегося впереди транспортного средства превышает заранее заданный набор пороговых значений, заданный как функция дистанции, представленной сигналом о расстоянии, и информации о скорости изменения расстояния, представленной сигналом о скорости изменения расстояния; и
контроллер двигателя, выполненный с возможностью запуска двигателя в ответ на прием управляющего сигнала.
20. Оборудованное транспортное средство по п. 19, в котором устройство обработки запрограммировано для прогнозирования запроса мощности оборудованного транспортного средства на основании перемещения находящегося впереди транспортного средства.
| US 2006142121 A1, 2006.06.29 | |||
| US 2015206430 A1, 2015.07.23 | |||
| US 2007112494 A1, 2007.05.17 | |||
| US 2012029730 A1, 2012.02.02 | |||
| US 2003029406 A1, 2003.02.13 | |||
| СПОСОБ МИНИМИЗАЦИИ РАСХОДА ТОПЛИВА ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С СИСТЕМОЙ НАКОПИТЕЛЕЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495266C2 |
| Автоматическое устройство для остановки двигателя при падении давления масла | 1975 |
|
SU613133A2 |

