Изобретение относится к машиностроению и может быть использовано при сборке и балансировке роторов компрессоров с магнитным подвесом газоперекачивающих агрегатов.
Известно изобретение по авторскому свидетельству СССР №1656968 «Магнитный подвес», содержащее устройство детектирования положения ротора, обмотку электромагнита, закрепленного в корпусе.
Известно изобретение по патенту РФ №2129228 «Магнитная опора для агрегата», содержащее вал в магнитной опоре, выполненный с роторами датчиков и роторами электромагнитов.
Известно изобретение по патенту РФ №2418198 «Способ балансировки сборного ротора», при котором балансируют вал и последовательно, после установки на вал очередного предварительно сбалансированного элемента, балансируют собираемый ротор. При предварительной балансировке каждого устанавливаемого элемента определяют и маркируют на элементе место максимального радиального биения его посадочной поверхности относительно балансировочных поверхностей. Перед установкой элементов на вал определяют и маркируют место максимального радиального биения каждой посадочной поверхности вала относительно его балансировочных поверхностей. Устанавливают элементы ротора на вал, совмещая при этом промаркированные места.
Последнее изобретение является ближайшим аналогом предлагаемого технического решения.
Недостатком известного способа является невозможность устранения существенного расхождения балансировочной и рабочей осей ротора.
Существенное расхождение осей обусловлено окончательной обработкой балансировочных поверхностей вала, определяющих положение балансировочной оси, при его изготовлении, в то время как положение рабочей оси ротора определяется обработкой рабочих поверхностей роторов радиальных датчиков в составе собираемого ротора компрессора. Это приводит к проведению технологического процесса сборки и балансировки с большим объемом технологических операций.
Технической проблемой, решение которой обеспечивается осуществлением предлагаемого изобретения, является уменьшение объема и повышение точности балансировки за счет уменьшения взаимного эксцентриситета балансировочной и рабочей осей ротора.
Технический результат заключается в повышении точности балансировки роторов с магнитным подвесом.
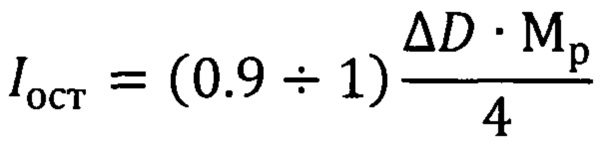
Технический результат достигается тем, что на вал, сбалансированный с использованием собственных механически окончательно обработанных балансировочных поверхностей, устанавливают предварительно сбалансированные рабочие колеса с совмещением предварительно промаркированных мест, а также элементы магнитного подвеса: роторы магнитных подшипников и роторы радиальных датчиков, при этом одновременно с окончательной обработкой поверхностей роторов магнитных подшипников, рабочих поверхностей роторов радиальных датчиков обрабатываются и балансировочные поверхности на валу ротора компрессора, с последующей балансировкой ротора в сборе с обеспечением направленности остаточных дисбалансов ротора в сторону биений соответствующих рабочих поверхностей роторов радиальных датчиков, при этом допустимые величины остаточных дисбалансов в средних плоскостях роторов радиальных датчиков определяются из зависимости:
где: ΔD - биение соответствующих рабочих поверхностей роторов радиальных датчиков, Мр - масса балансируемого ротора.
Признаки являются существенными:
- окончательная обработка балансировочных поверхностей одновременно с рабочими поверхностями роторов радиальных датчиков резко снижают их взаимный эксцентриситет, что уменьшает объем балансировки и ее погрешность;
- предложенная математическая зависимость позволяет с приемлемой точностью определять величину остаточного дисбаланса, равную по величине монтажного дисбаланса и диаметрально противоположную по направлению.
Способ поясняется графическими материалами, представленными на фиг. 1, 2, 3.
На фиг. 1 показана установка колес при балансировке с учетом места максимального биения посадочной поверхности балансировочной оправки.
На фиг. 2 показано положение остаточного дисбаланса рабочего колеса, установленного на вал.
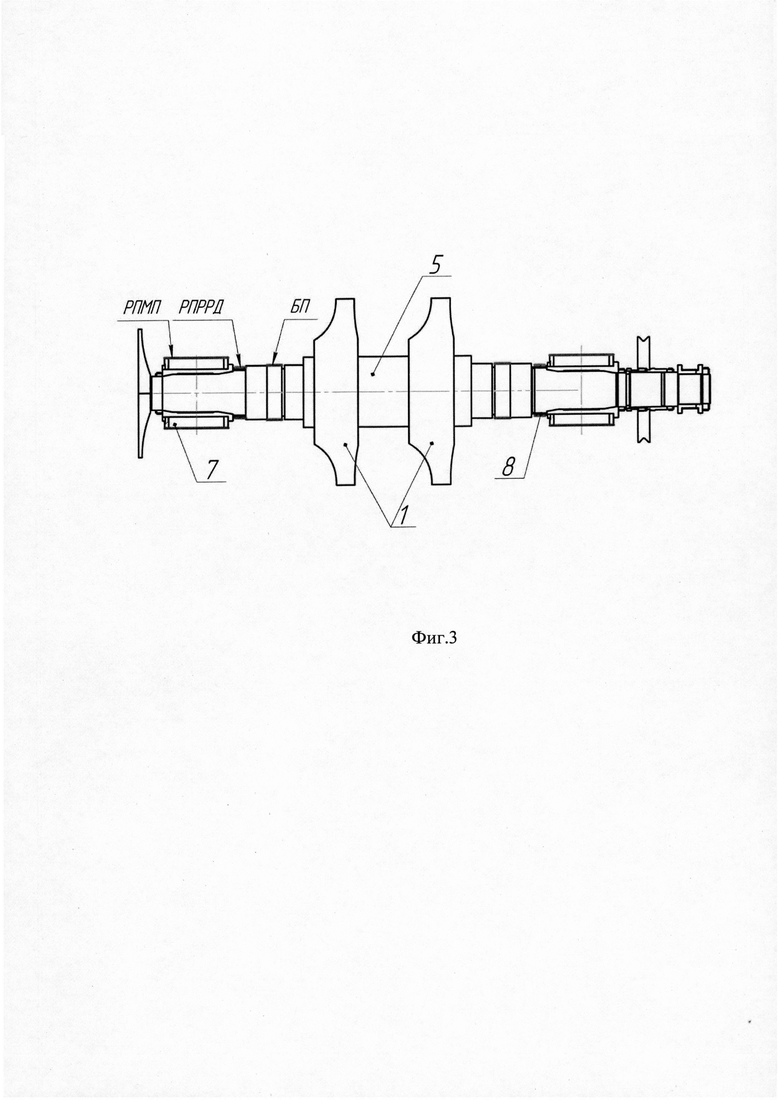
На фиг. 3 показан собранный ротор с одновременно обработанными рабочими поверхностями роторов радиальных датчиков балансировочными поверхностями ротора.
На фигурах обозначено:
1 - рабочее колесо,
2 - балансировочная оправка,
3 - измерительные опоры,
4 - риска маркировочная,
5 - вал ротора,
6 - измерительные опоры,
7 - роторы магнитных подшипников,
8 - роторы радиальных датчиков.
МБрк, МБппо, МБппв - место максимального радиального биения уплотнительной поверхности покрывного диска рабочего колеса, посадочной поверхности балансировочной оправки, посадочной поверхности вала ротора соответственно.
Iост - остаточный дисбаланс колес роторов.
БП, РПРРД, РПМП - балансировочные поверхности, рабочих поверхностей роторов радиальных датчиков, радиальные поверхности роторов магнитных подшипников.
Способ осуществляется следующим образом.
Перед сборкой ротора рабочее колесо 1 (фиг. 1) надевают на балансировочную оправку 2 и устанавливают на измерительные опоры 3. Определяют место максимального радиального биения (МБрк) уплотнительной поверхности покрывного диска рабочего колеса. Снимают колесо и повторно надевают его с диаметрально противоположным направлением места максимального радиального биения МБрк относительно места максимального радиального биения МБппо посадочной поверхности балансировочной оправки 2. Балансируют колесо, обеспечивая диаметрально противоположное направление остаточного дисбаланса Iост относительно места максимального радиального биения МБппо. На ступице рабочего колеса 1 маркируют место максимального радиального биения МБппо риской 4. На валу 5, используя измерительные опоры 6, определяют места максимального радиального биения посадочных поверхностей под рабочие колеса и маркируют их.
Собирают ротор, устанавливая колеса 1 на вал 5, с совмещением промаркированных мест. Устанавливают на вал роторы магнитных подшипников 7 и роторы радиальных датчиков 8. Обрабатывают радиальные поверхности роторов магнитных подшипников (РПМП), рабочие поверхности роторов радиальных датчиков (РПРРД) и балансировочные поверхности (БП) на валу ротора компрессора одновременно с одной установки. Этим обеспечивается минимизация биения рабочих поверхностей роторов радиальных датчиков относительно балансировочных поверхностей на валу ротора, а следовательно, и эксцентриситета рабочей оси ротора относительно балансировочной.
Примечание: обработка балансировочных поверхностей, радиальных поверхностей роторов магнитных подшипников и рабочих поверхностей роторов радиальных датчиков производится с одной установки независимо от исполнения элементов магнитного подвеса: магнитные подшипники могут быть как отдельными элементами, так и одной объединенной конструкцией.
Балансируют ротор в сборе с обеспечением направленности остаточных дисбалансов ротора в сторону соответствующих биений рабочих поверхностей роторов радиальных датчиков, при этом допустимые величины остаточных дисбалансов в средних плоскостях роторов радиальных датчиков определяются из зависимости:
где: ΔD - биение соответствующих биений рабочих поверхностей роторов радиальных датчиков, Мр - масса балансируемого ротора.
Предложенная математическая зависимость отражает соотношение факторов, обеспечивающих динамическую устойчивость ротора.
Наличие некоторого, полученного вследствие погрешности обработки, эксцентриситета рабочей оси вращения относительно балансировочной обуславливает появление монтажного дисбаланса. Этот дисбаланс вполне может быть уравновешен (в составе компрессора) предварительно созданным остаточным дисбалансом, по направлению - диаметрально противоположным, а по величине - равным монтажному. Эксцентриситет осей в срединных плоскостях роторов радиальных датчиков определяется из зависимости:
где ΔD - биение соответствующих рабочих поверхностей роторов радиальных датчиков.
Эксцентриситет и масса ротора, приходящаяся на опору, определяют величину остаточного дисбаланса. При этом практикой принято, что на каждую опору ротора приходится половина массы ротора:
Представленные зависимости позволяют определить величину остаточного дисбаланса в первом приближении как:
Однако наряду с этим всегда имеются некоторые дополнительные условия: положение срединных плоскостей всегда несколько смещено относительно центров половин масс ротора, приходящихся на каждую опору, кроме того, имеется достаточно широкий допуск остаточных дисбалансов, определенный как государственными стандартами, так и техническими условиями на магнитный подвес. Это делает возможным задавать допустимый остаточный дисбаланс с некоторым диапазоном отступления. По средним показателям масс, удельных остаточных дисбалансов и требований ТУ на магнитный подвес окончательно зависимость будет иметь вид:
Таким образом, применение предложенного технического решения обеспечивает повышение точности балансировки роторов с магнитным подвесом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДВАРИТЕЛЬНОЙ БАЛАНСИРОВКИ ЭЛЕМЕНТА СБОРНОГО РОТОРА НА ОПРАВКЕ | 2010 |
|
RU2431064C1 |
| СПОСОБ СБОРКИ РОТОРА | 2019 |
|
RU2731506C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2013 |
|
RU2554666C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2010 |
|
RU2418198C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2008 |
|
RU2372595C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2010 |
|
RU2449180C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА ЦЕНТРОБЕЖНОГО КОМПРЕССОРА | 2014 |
|
RU2565119C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА ЦЕНТРОБЕЖНОГО КОМПРЕССОРА | 2014 |
|
RU2554669C1 |
| Способ сборки валопровода | 2016 |
|
RU2630954C1 |
Изобретение относится к машиностроению и может быть использовано при сборке и балансировке роторов компрессоров с магнитным подвесом газоперекачивающих агрегатов. Способ балансировки, при котором на вал, сбалансированный с использованием собственных механически окончательно обработанных балансировочных поверхностей, устанавливают предварительно сбалансированные рабочие колеса с совмещением предварительно промаркированных мест, а также элементы магнитного подвеса: роторы магнитных подшипников и роторы радиальных датчиков. Одновременно с окончательной механической обработкой поверхностей роторов подшипников, рабочих поверхностей роторов датчиков обрабатываются и балансировочные поверхности на валу ротора компрессора, с последующей балансировкой ротора в сборе с обеспечением направленности остаточных дисбалансов ротора в сторону биений соответствующих рабочих поверхностей роторов датчиков. Допустимые величины остаточных дисбалансов в средних плоскостях роторов датчиков определяются из зависимости от биения соответствующих рабочих поверхностей роторов датчиков и массы балансируемого ротора. Изобретение направлено на обеспечение повышения точности балансировки роторов с магнитным подвесом. 3 ил.
Способ балансировки ротора с магнитным подвесом, при котором на вал, сбалансированный с использованием собственных механически окончательно обработанных балансировочных поверхностей, устанавливают предварительно сбалансированные рабочие колеса с совмещением предварительно промаркированных мест, а также элементы магнитного подвеса: роторы магнитных подшипников и роторы радиальных датчиков, одновременно с окончательной механической обработкой поверхностей роторов магнитных подшипников, рабочих поверхностей роторов радиальных датчиков обрабатываются и балансировочные поверхности на валу ротора компрессора, с последующей балансировкой ротора в сборе с обеспечением направленности остаточных дисбалансов ротора в сторону биений соответствующих рабочих поверхностей роторов радиальных датчиков, при этом допустимые величины остаточных дисбалансов в средних плоскостях роторов радиальных датчиков определяются из зависимости:
где: ΔD - биение соответствующих рабочих поверхностей роторов радиальных датчиков, Мр - масса балансируемого ротора.
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2010 |
|
RU2418198C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2010 |
|
RU2449180C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2008 |
|
RU2372595C1 |
| JP 2015169211 A, 28.09.2015 | |||
| ВЕРТИКАЛЬНЫЙ ВЕТРОВОЙ ЭЛЕКТРОГЕНЕРАТОР | 2009 |
|
RU2511985C2 |

