Изобретение относится к способам, используемым в газовой промышленности, в частности при проведении текущего обслуживания и ремонта (ТО и Р) газоперекачивающих агрегатов (ГПА) с центробежным нагнетателем (ЦБН), оснащенным системой магнитного подвеса.
Центробежный нагнетатель с ротором на магнитных подшипниках не обладает высокой вибрационной устойчивостью при работе ЦБН на режимах магистрального газопровода с малым расходом перекачиваемого газа и высокой степенью сжатия.
Основными причинами низкой вибрационной устойчивости ЦБН, оснащенного системой магнитного подвеса, является большое количество насадных деталей ротора и недостаточная конструктивная технологичность их монтажа, отсутствие детальных инструкций по установке роторных деталей, контролю качества сборки, контролю геометрии собранного ротора. Кроме того, за время эксплуатации появляется дисбаланс от эрозионного износа рабочих лопаток ЦБН.
Для повышения вибрационной устойчивости необходимо производить балансировку ротора ЦБН при проведении ТО и Р ГПА в условиях компрессорной станции.
Широко известен способ балансировки ротора на балансировочном станке в условиях завода-изготовителя. Недостатком такого способа являются существенные временные и материальные затраты по транспортировке ротора ЦБН на завод-изготовитель, и его балансировке в заводских условиях.
Одним из таких способов является изобретение «Способ балансировки ротора» - патент RU №2449180, МПК F04D 29/66 G01M 1/32 от 09.09.2021. Недостатком данного способа является, что балансировка производится отдельно для ротора ЦБН и не учитывает влияние промвала, соединяющего ротор ЦБН с ротором силовой турбины приводного газотурбинного двигателя.
Известно изобретение «Способ балансировки ротора с магнитным подвесом» - патент RU №2743926, МПК G01M 1/32 F04D 29/66 21.06.2019, при котором на вал, сбалансированный с использованием собственных механически окончательно обработанных балансировочных поверхностей устанавливают предварительно сбалансированные рабочие колеса с совмещением предварительно промаркированных мест, а также элементы магнитного подвеса: роторы магнитных подшипников и роторы радиальных датчиков, одновременно с окончательной механической обработкой поверхностей роторов магнитных подшипников, рабочих поверхностей роторов радиальных датчиков обрабатываются и балансировочные поверхности на валу ротора компрессора, с последующей балансировкой ротора в сборе с обеспечением направленности остаточных дисбалансов ротора в сторону биений соответствующих рабочих поверхностей роторов радиальных датчиков.
Последнее изобретение является ближайшим аналогом предлагаемого технического решения.
Недостатком известного способа является то, что балансировочный станок, на котором проводится балансировка в заводских условиях, имеет низкую частоту вращения (до 1000 об/мин), при которой не учитываются динамические прогибы гибкого ротора. Ротор центробежного нагнетателя с магнитным подвесом является гибким, наиболее часто используемая рабочая частота вращения 4700-4800 об/мин, поэтому при балансировке на низкооборотном балансировочном станке появляется существенное расхождение балансировочной и рабочей осей ротора.
Задачей изобретения является повышение эффективности ТО и Р ГПА с ЦБН, оснащенным системой магнитного подвеса, в условиях компрессорной станции.
Технический результат - снижение уровня вибрации ротора ЦБН с магнитным подвесом на всех режимах работы магистрального газопровода и как следствие увеличение диапазона устойчивой работы ЦБН на режимах с малым расходом перекачиваемого газа и высокой степенью сжатия.
Поставленная задача, в повышении эффективности ТО и Р ГПА с ЦБН, оснащенным системой магнитного повеса, в условиях компрессорной станции, достигается путем динамической балансировки ротора ЦБН, оснащенного системой магнитного подвеса, в собственных опорах.
Способ заключается в векторном уравновешивании двухопорных роторов в двух плоскостях коррекции. В связи с тем, что ротор ЦБН является гибким, балансировка производится на одной частоте вращения, соответствующей 4700-4800 об/мин. Для компенсации дисбаланса передней опоры нагнетателя (ПОН) используется влияние груза, установленного на заднюю опору нагнетателя (ЗОН), а для компенсации дисбаланса ЗОН используется влияние груза, установленного на ПОН.
Для снятия показаний используется виброизмерительный комплекс производства SKF. Источником сигнала размаха вибрации являются выходы системы контроля вибрации ЦБН, а для измерения ее фазы используется оптический отметчик производства SKF, устанавливаемый на корпусе нагнетателя.
Для определения амплитуд и фаз колебаний опор, вызванных дисбалансом ротора ЦБН необходимо произвести три пробных запуска ГПА:
1) «Нулевой пуск» для определения амплитуд и фаз колебаний обеих подшипниковых опор под воздействием исходного дисбаланса ротора.
Векторы колебаний подшипниковых опор  и
и  расположенные под углами βϕ0 и ψ0 соответственно, обозначены на фиг. 1 зеленым цветом.
расположенные под углами βϕ0 и ψ0 соответственно, обозначены на фиг. 1 зеленым цветом.
2) Пуск с пробным грузом массой Р1, установленным под углом γ1 в плоскости ПОН (на болт №19). Пробный груз Р1 обозначен на фиг. 2 красным цветом. Векторы колебаний подшипниковых опор  и
и  расположенные под углами ϕ01 и ψ01 соответственно, обозначены на фиг. 2 синим цветом. После пуска пробный груз Р1 с ротора снимается.
расположенные под углами ϕ01 и ψ01 соответственно, обозначены на фиг. 2 синим цветом. После пуска пробный груз Р1 с ротора снимается.
3) Пуск с пробным грузом массой Р2, установленным под углом γ2 в плоскости ЗОН (на болт №27). Пробный груз Р2 обозначен на фиг. 3 красным цветом. Векторы колебаний подшипниковых опор  и
и  расположенные под углами ϕ02 и ψ02 соответственно, обозначены на фиг. 3 синим цветом. После пуска груз Р2 с ротора снимается.
расположенные под углами ϕ02 и ψ02 соответственно, обозначены на фиг. 3 синим цветом. После пуска груз Р2 с ротора снимается.
На фиг. 2 и фиг. 3 векторы колебаний подшипниковых опор, масса и места установки пробных грузов приняты условно.
Изменение вибрации на опорах после установки пробных грузов Р1 и Р2 в каждую из плоскостей коррекции есть результат влияния этих грузов:

 - векторы влияния пробного груза Р2 на опоры ПОН и ЗОН (на фиг. 2 обозначены черным цветом);
- векторы влияния пробного груза Р2 на опоры ПОН и ЗОН (на фиг. 2 обозначены черным цветом);

 - векторы влияния пробного груза Р2 на опоры ПОН и ЗОН (на фиг. 3 обозначены черным цветом).
- векторы влияния пробного груза Р2 на опоры ПОН и ЗОН (на фиг. 3 обозначены черным цветом).
Векторы влияния определяются как разницы векторов вибраций опор после установки каждого пробного груза и векторов начальных вибраций этих же опор:

Для устранения вибраций на опорах, вызываемых дисбалансом ротора ЦБН, необходимо установить в плоскостях коррекции балансировочные грузы такой массы и под такими углами, чтобы динамические реакции опор стали равными нулям. Это значит, что геометрические суммы векторов влияния от обоих балансировочных грузов на каждую из опор должны быть равными по величине и противоположными по направлению векторам начальных вибраций опор.
По результатам пробных запусков, используя векторный метод, определяются векторы влияния, установленных грузов на плоскости коррекции. Используя величину и угол векторов влияния определяются массы и места установки грузов, которые требуются для уравновешивания исходного дисбаланса.
Для уравновешивания динамической реакции опоры ЗОН, вызванной начальным дисбалансом ротора, рассматривается только влияние пробного груза Р1, установленного на плоскость коррекции ПОН. Для компенсации влияния исходного дисбаланса на ротор вместо пробного груза следует установить такой уравновешивающий груз P1yp, вектор влияния которого  был бы равен вектору начальной вибрации
был бы равен вектору начальной вибрации  по модулю и направлен противоположно. Для этого вектор влияния пробного груза
по модулю и направлен противоположно. Для этого вектор влияния пробного груза  переносится в начало координат.
переносится в начало координат.
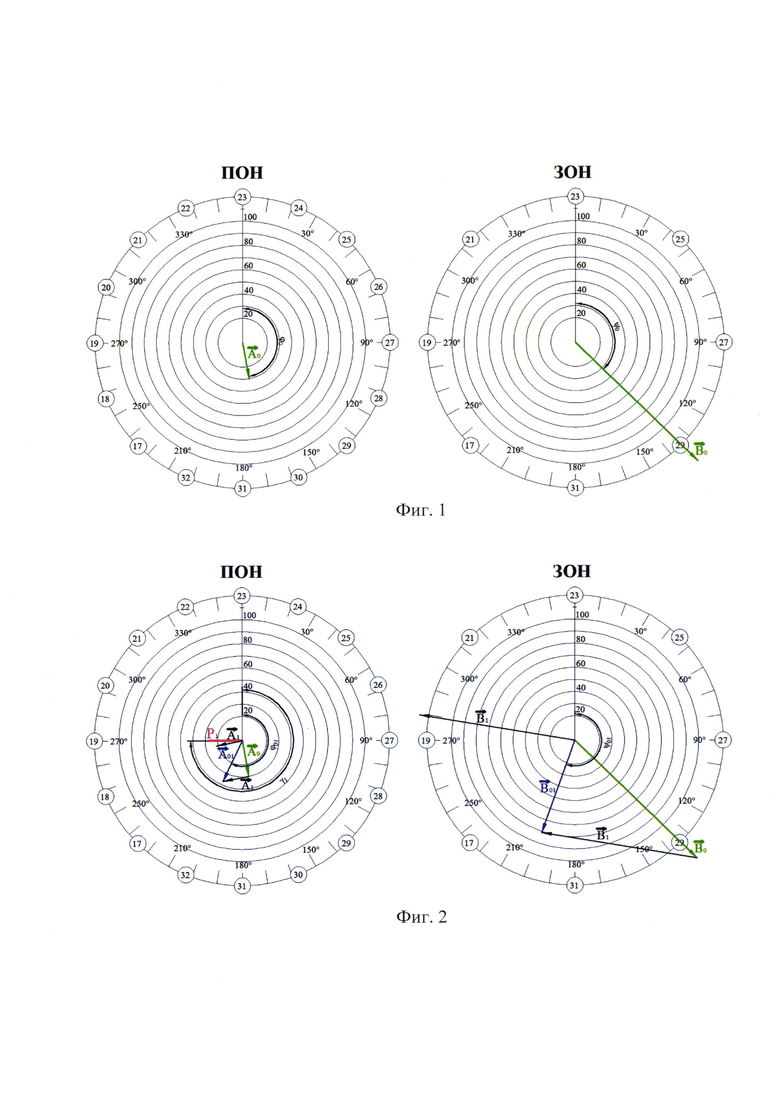
На фиг. 4 видно, что для уравновешивания вектора  вектором
вектором  (обозначен голубым цветом) необходимо развернуть пробный груз по часовой стрелке на угол α1 и изменить его массу пропорционально отношению длин векторов.
(обозначен голубым цветом) необходимо развернуть пробный груз по часовой стрелке на угол α1 и изменить его массу пропорционально отношению длин векторов.
Угол установки уравновешивающего груза определяется как сумма начальной установки и угла поворота вектора:

Масса груза Р1ур, необходимая для полной компенсации исходной неуравновешенности ЗОН, рассчитывается по следующему соотношению:

Таким образом вибрация ЗОН устранена полностью. Реакция опоры ПОН от исходной неуравновешенности ротора определялась ранее вектором  но так как в плоскости коррекции ПОН установлен уравновешивающий груз P1yр, то ее значение изменится на величину вектора влияния этого груза
но так как в плоскости коррекции ПОН установлен уравновешивающий груз P1yр, то ее значение изменится на величину вектора влияния этого груза  (обозначен голубым цветом). Оставшийся вектор дисбаланса на ПОН, который необходимо компенсировать, представляет собой геометрическую сумму вектора начальной вибрации и вектора влияния, установленного в плоскость коррекции ПОН, уравновешивающего груза на опору:
(обозначен голубым цветом). Оставшийся вектор дисбаланса на ПОН, который необходимо компенсировать, представляет собой геометрическую сумму вектора начальной вибрации и вектора влияния, установленного в плоскость коррекции ПОН, уравновешивающего груза на опору:

где  - вектор влияния уравновешивающего груза Р1ур, установленного в плоскость ПОН (получен из вектора
- вектор влияния уравновешивающего груза Р1ур, установленного в плоскость ПОН (получен из вектора  путем его поворота на угол α1, т.е. угол, на который был повернут корректирующий груз в плоскости ПОН к пробному грузу), а длина вектора определена из соотношения:
путем его поворота на угол α1, т.е. угол, на который был повернут корректирующий груз в плоскости ПОН к пробному грузу), а длина вектора определена из соотношения:

Т.е. после установки груза на плоскость ПОН, вибрация на опоре ЗОН устранена полностью. Необходимо скомпенсировать оставшийся дисбаланс ПОН амплитудой  и фазой δ1 (обозначен вектором оранжевого цвета).
и фазой δ1 (обозначен вектором оранжевого цвета).
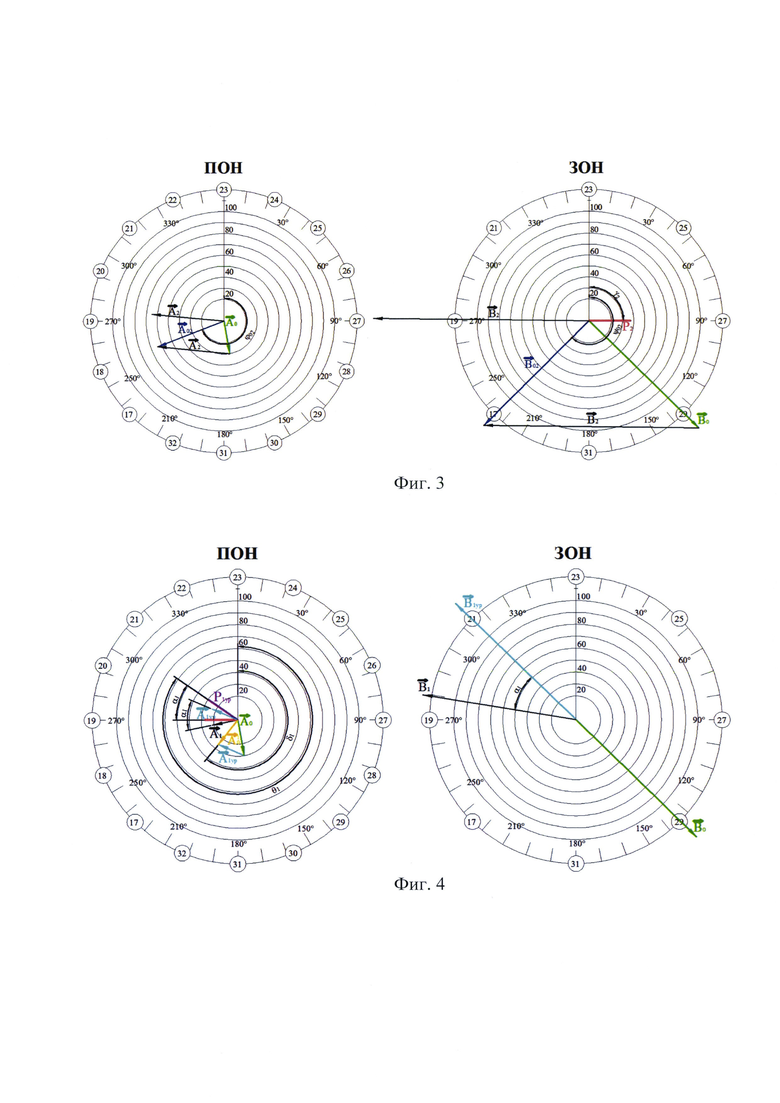
На фиг. 5 показан графический расчет груза ЗОН. Для устранения вибрации опоры ПОН  необходимо установить груз Р2ур в плоскость коррекции ЗОН:
необходимо установить груз Р2ур в плоскость коррекции ЗОН:

и под углом

После установки корректирующих грузов на плоскости коррекции Р1ур и Р2ур имеется остаточный дисбаланс  на опоре ЗОН как реакция опоры на корректирующий груз Р2ур в плоскости коррекции ЗОН (обозначен голубым цветом).
на опоре ЗОН как реакция опоры на корректирующий груз Р2ур в плоскости коррекции ЗОН (обозначен голубым цветом).
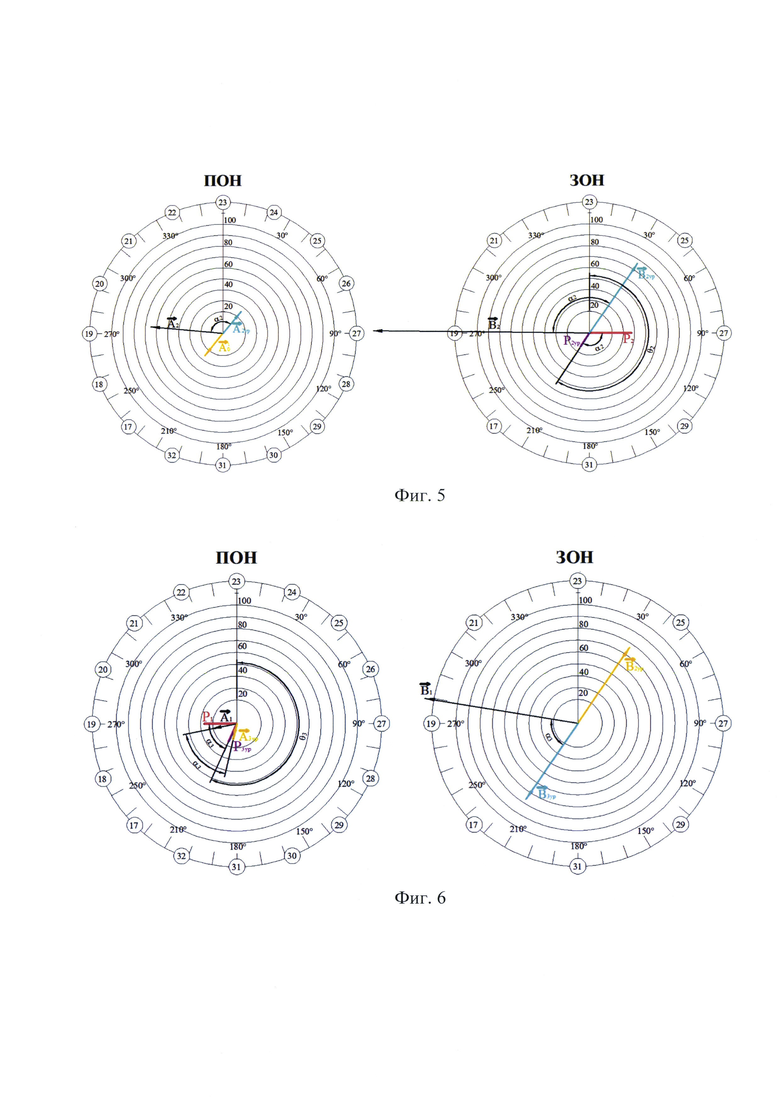
Для компенсации остаточного дисбаланса опоры ЗОН  проводятся аналогичные расчеты уравновешивающего груза РЗур на плоскость коррекции ПОН и рассчитывается вес и положение нового груза. Графический расчет массы и угла установки груза РЗур показан на фиг. 6.
проводятся аналогичные расчеты уравновешивающего груза РЗур на плоскость коррекции ПОН и рассчитывается вес и положение нового груза. Графический расчет массы и угла установки груза РЗур показан на фиг. 6.
Масса груза рассчитывается:

Угол установки груза РЗур в плоскости ПОН должен быть равен:

Новый груз РЗур, установленный на ПОН, также воздействует на опору ПОН, однако, как видно на фиг. 6, величина вектора остаточного дисбаланса ПОН  (обозначен оранжевым цветом) незначительна (более чем в два раза меньше вектора начального дисбаланса ПОН
(обозначен оранжевым цветом) незначительна (более чем в два раза меньше вектора начального дисбаланса ПОН  при том, что изначально повышенный дисбаланс ЗОН
при том, что изначально повышенный дисбаланс ЗОН  устранен полностью). Этот груз, устранив вибрацию на одной опоре, будет изменять уравновешенное состояние на другой. Таким образом, процесс уравновешивания необходимо продолжать до тех пор, пока вибрация на обеих опорах не достигнет заданной величины.
устранен полностью). Этот груз, устранив вибрацию на одной опоре, будет изменять уравновешенное состояние на другой. Таким образом, процесс уравновешивания необходимо продолжать до тех пор, пока вибрация на обеих опорах не достигнет заданной величины.
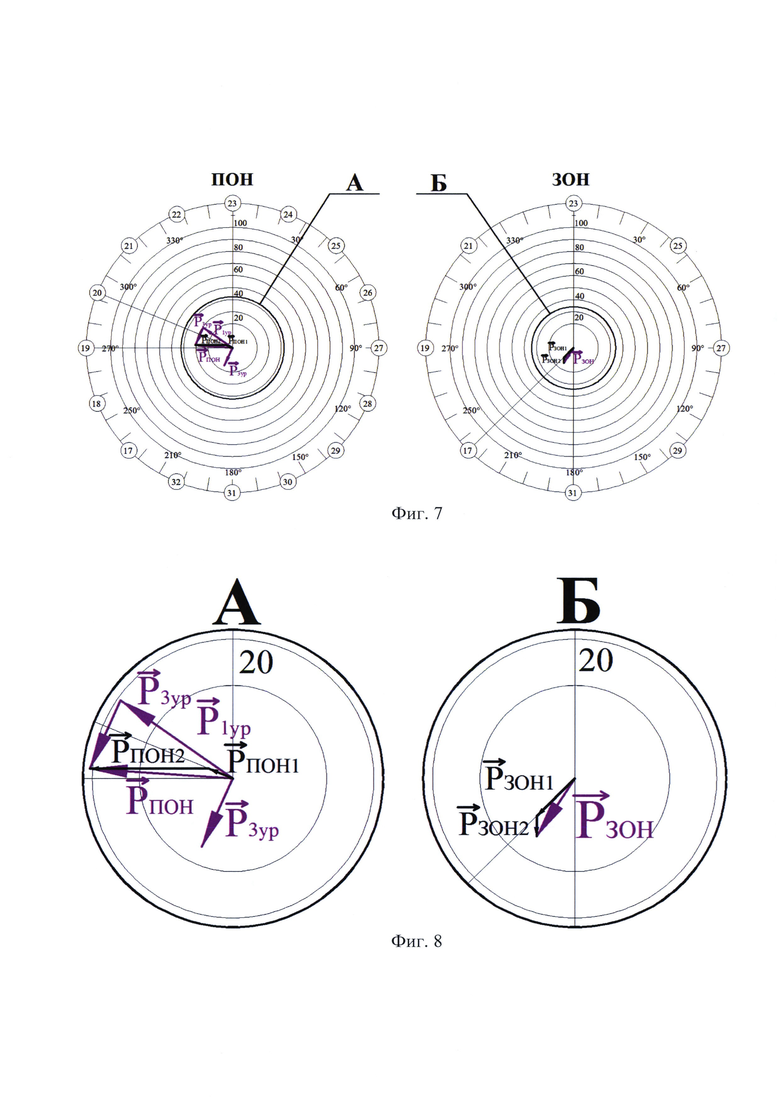
После этого все рассчитанные грузы представляются в виде векторов и геометрически суммируются (фиг. 7, 8).
На плоскость коррекции ПОН необходимо установить два груза - P1yp и РЗур, сумма векторов которых равна:

На плоскость коррекции ЗОН необходимо установить один груз Р2ур, представим его в виде вектора 
По результирующим векторам 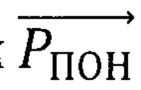 и
и  определяются масса и положение итоговых грузов. Так как угол установки итоговых компенсирующих грузов не соответствует положению болтов, необходимо получившиеся векторы разложить на два вектора с направлениями, совпадающими с ближайшими болтами, что показано на фиг. 7, 8:
определяются масса и положение итоговых грузов. Так как угол установки итоговых компенсирующих грузов не соответствует положению болтов, необходимо получившиеся векторы разложить на два вектора с направлениями, совпадающими с ближайшими болтами, что показано на фиг. 7, 8:

Следовательно, для компенсации дисбаланса ротора ЦБН необходимо (в данном примере):
- установить два груза на плоскость коррекции ПОН массами PПОН1 и РПОН2 на болты №№20 и 19 соответственно;
- установить два груза на плоскость коррекции ЗОН массами РЗОН1 и РЗОН2 на болты №№17 и 31 соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки ротора газоперекачивающего агрегата | 2017 |
|
RU2658597C1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| СПОСОБ СНЯТИЯ ПОКАЗАНИЙ С ФАЗООТМЕТЧИКА ПРИ БАЛАНСИРОВКЕ ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2818502C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ВОЗДУШНО-ВИНТОВОГО АГРЕГАТА СИЛОВОЙ УСТАНОВКИ НА САМОЛЕТЕ | 1992 |
|
RU2039958C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| СПОСОБ УРАВНОВЕШИВАНИЯ РОТОРОВ СКВАЖИННЫХ ЦЕНТРОБЕЖНЫХ НАСОСОВ | 2011 |
|
RU2476844C1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2008 |
|
RU2372595C1 |
Изобретение относится к области балансировки изделий и может быть использовано, в частности, при проведении текущего обслуживания и ремонта (ТО и Р) газоперекачивающих агрегатов (ГПА) с центробежным нагнетателем (ЦБН), оснащенным системой магнитного подвеса. Способ балансировки реализуется путем динамической балансировки ротора ЦБН, оснащенного системой магнитного подвеса, в собственных опорах. Способ заключается в векторном уравновешивании двухопорных роторов в двух плоскостях коррекции. При реализации способа вначале производится пуск газоперекачивающих агрегатов (ГПА) с центробежным нагнетателем (ЦБН) для определения амплитуд и фаз колебаний обеих подшипниковых опор ротора ЦБН под воздействием исходного дисбаланса ротора, затем пуск с пробным грузом на передней опоре и после этого пуск с пробным грузом на задней опоре. По их результатам производится определение векторов вибраций опор и векторов влияния. По результатам пробных запусков, используя векторный метод, определяются векторы влияния установленных грузов на плоскости коррекции. Используя величину и угол векторов влияния, определяются массы и места установки грузов, которые требуются для уравновешивания исходного дисбаланса ротора ЦБН. В связи с тем, что ротор ЦБН является гибким, балансировка производится на частоте вращения, соответствующей 4700-4800 об/мин. Технический результат заключается в снижении уровня вибрации ротора ЦБН с магнитным подвесом на всех режимах работы магистрального газопровода и, как следствие, увеличении диапазона устойчивой работы ЦБН на режимах с малым расходом перекачиваемого газа и высокой степенью сжатия. 8 ил. 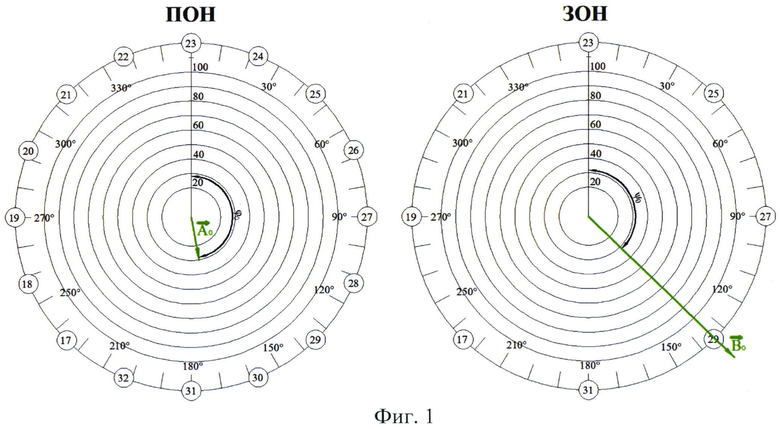
Способ динамической балансировки ротора ЦБН, оснащенного системой магнитного подвеса в собственных опорах, с помощью векторного метода уравновешивания двухопорных роторов в двух плоскостях коррекции, заключающийся в пуске газоперекачивающих агрегатов с центробежным нагнетателем (ЦБН) для определения амплитуд и фаз колебаний обеих подшипниковых опор ротора ЦБН под воздействием исходного дисбаланса ротора, затем в пуске с пробным грузом на передней опоре и после этого в пуске с пробным грузом на задней опоре, по результатам которых производится определение векторов вибраций опор и векторов влияния, по результатам пробных запусков, используя векторный метод, определяют векторы влияния установленных грузов на плоскости коррекции, используя величину и угол векторов влияния, определяют массы и места установки грузов, которые требуются для уравновешивания исходного дисбаланса ротора ЦБН, при этом для уравновешивания динамической реакции задней опоры, вызванной начальным дисбалансом ротора, производится установка такого уравновешивающего груза, вектор влияния которого был бы равен вектору начальной вибрации по модулю и направлен противоположно, после осуществления данной операции оставшийся дисбаланс в передней опоре ротора, представляющий собой геометрическую сумму вектора начальной вибрации и вектора влияния уже установленного в плоскости коррекции передней опоры уравновешивающего груза на опору, устраняют установкой груза в плоскости коррекции задней опоры, после установки корректирующих грузов на плоскостях коррекции передней и задней опор ротора ЦБН остаточный дисбаланс на задней опоре, как реакция опоры на корректирующий груз на передней опоре, устраняют путем расчетов по данным установки уравновешивающего груза на плоскость коррекции передней опоры и рассчитывают вес и положение нового груза, при этом процесс уравновешивания производится до того момента, когда вибрация на обеих опорах не достигнет заданной величины, после этого все рассчитанные грузы представляются в виде векторов и геометрически суммируются, по результирующим векторам определяются масса и положение итоговых грузов, при этом получившиеся векторы раскладывают на два вектора с направлениями, совпадающими с ближайшими болтами для установки грузов на роторе ЦБН, при этом балансировка гибкого ротора проводится в собственных опорах на одной частоте вращения, соответствующей 4700-4800 об/мин.
| Способ балансировки ротора с магнитным подвесом | 2019 |
|
RU2743926C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2010 |
|
RU2449180C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 1999 |
|
RU2163008C2 |
| Способ уравновешивания гибких роторов | 1980 |
|
SU932330A1 |
| Нитеобрезное приспособление при обрыве, сходе или затяжке одной из нитей, питающих систему в круглой трикотажной машине | 1936 |
|
SU52015A1 |
