ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к технологии дифференцированного полива и решает задачи по дистанционному контролю и управлению подачей воды с учетом поливных норм для выращиваемых сельскохозяйственных (с/х) культур при применении различных видов оросительных систем.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно множество различных систем, направленных на обеспечение дифференцированного полива сельскохозяйственных культур, управляемая ирригационная система, описанная в заявке US 2003/230638 А1, опубл. 18.12.2003. Данная система содержит устройство управления для определения, следует ли орошать почву, по меньшей мере одну ирригационную структуру, имеющую исполнительный механизм для управления потоком воды, датчик влажности, размещенные на различной глубине в почве, причем устройство управления определяет, следует ли орошать почву на основании данных датчика влажности.
Однако данная система не позволяет осуществлять дифференцированное распределение объема воды, как по орошаемой площади, так и по времени. Необходимость в дозировании по времени подачи воды для нужд площадного орошения определяется с целью недопущения образования поверхностного стока при выполнении поливных норм полива сельскохозяйственной культуры. Образование поверхностного стока приводит к нарушению структуры почвы, снижению газообмена и, как следствие, созданию неблагоприятных условий для роста и развития растений. Одновременно образование поверхностного стока приводит к увеличению расхода поливаемой воды, образованию локальных зон переувлажнения, луж. Возникновение таких ситуаций происходит в случае не учета как первичного состояния почвы, в частности - влажности, так и ее физических характеристик в реальном времени.
Кроме того, из уровня техники известна интеллектуальная модульная система дифференцированного полива, раскрытая в WO 2019/039954 А1, опубл. 28.02.2019, прототип. Данная система содержит устройство управления, содержащее блок обработки первоначальных данных и центральный блок управления. Блок обработки первоначальных данных, выполненный с возможностью: получения первоначальных данных, характеризующих: количество посаженных культур; координаты посаженных культур; нормы полива; и первоначальную влажность почвы; формирования карты полива, определяющей по меньшей мере один участок полива и по меньшей мере один режим полива участка полива на основе анализа полученных первоначальных данных. Центральный блок управления системой дифференцированного полива сельскохозяйственных культур, выполненный с возможностью: управления системой дифференцированного полива сельскохозяйственных культур для полива сельскохозяйственных культур в соответствии с картой полива; получения информации о действительных значениях влажности почвы на по меньшей мере одном участке полива на различной глубине и определения фильтрационных свойств почвы на по меньшей мере одном участке полива; корректировки по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом фильтрационных свойства почвы данного участка полива; корректировки в реальном времени карты полива в соответствии с уточненным по меньшей мере одним режимом полива; управления упомянутой системой дифференцированного полива для полива сельскохозяйственных культур в соответствии с уточненной картой полива.
Недостатком раскрытого выше технического решения является отсутствие формирование базы данных по поливаемому полу; синхронизация местоположения дождевальной машины на поливаемом поле, определенной при помощи геомагнитного поля Земли, с картой полива.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является создание на базе средства полива - дождевальная машина (ДМ) интеллектуальной оросительной системы, выполненной с возможностью принятия решений, дифференцированной адресной и точечной подачи воды и минеральных удобрений на каждый участок поля, посредством сформированной базы данных о конкретном поливаемом поле с детализацией участков поля с учетом анизотропии, микрорельефа, физических свойств почвы, которые на основе технологий Big Data и Blockchain.
Техническим результатом изобретения является повышение точности дифференцированного полива с/х культур.
Указанный технический результат достигается за счет того, что способ управления дифференцированным поливом сельскохозяйственных культур, содержит этапы, на которых:
разбивают поле на участки полива произвольной формы, имеющие различные выращиваемые культуры и разную первоначальную влажность почвы, и получают первоначальные данные при помощи средства разделения поля на участки произвольной формы посредством сетей Wi-Fi или GSM, характеризующие: нормы полива и количество посаженных культур, координаты участков полива по их границам;
получают первоначальные данные с датчиков посредством М2М технологии, характеризующие: координаты посаженных культур; первоначальную влажность почвы; и максимальные и минимальные значения влажности почвы на контролируемой глубине;
формируют цифровую карту полива, определяющую по меньшей мере один участок полива и по меньшей мере один режим полива участка полива на основе анализа полученных первоначальных данных;
осуществляют полив сельскохозяйственных культур при помощи по меньшей мере одного средства полива в соответствии с цифровой картой полива, при синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива;
получают информацию посредством М2М технологии о действительных значениях влажности почвы по меньшей мере одного участка полива на различной глубине, обеспечивающую формирование базы данных о поливаемом поле;
корректируют по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом действительных значений влажности почвы по меньшей мере одного участка полива на различной глубине;
уточняют в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива;
осуществляют полив сельскохозяйственных культур при помощи по меньшей мере одного средства полива в соответствии с уточненной цифровой картой полива, при синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива, при этом в процессе полива осуществляют закрытие крана форсунки в случае выполнения одного из условий: WIв ≥Wminв, WIв ≥Wmaxв, WIс ≥Wmaxс, WIC ≥Wminс, WIн ≥Wmaxн, WIн ≥Wminн, где WIв - текущее значение влажности верхнего уровня, WIс - текущее значение влажности среднего уровня; WIн - текущее значение влажности нижнего уровня; Wmaxв, Wminв - заданные значения max и min влажности верхнего уровня; Wmaxс, Wminс - заданные значения max и min влажности среднего уровня, Wmaxн, Wminн - заданные значения max и min влажности нижнего уровня.
Способ дополнительно содержит этап, на котором определяют состояние сельскохозяйственных культур на по меньшей мере одном участке полива, причем по меньшей мере один режим полива на по меньшей мере одном участке полива корректируют с учетом состояния сельскохозяйственных культур на участке полива.
Способ дополнительно содержит этап, на котором определяют микроэлементный состав почвы, причем по меньшей мере один режим полива на по меньшей мере одном участке полива корректируют с учетом микроэлементного состава почвы на участке полива.
Способ содержит этап внесения удобрений на основе состояния сельскохозяйственных культур или микроэлементного состава почвы, соответственно.
Способ дополнительно содержит этап, на котором определяют рН и температуру почвы, причем по меньшей мере один режим полива по меньшей мере на одном участке полива корректируют с учетом рН и температуры почвы на участке полива.
По меньшей мере один режим полива включает параметры времени продолжительности открытия крана форсунки и скважности ее работы, причем корректировка по меньшей мере одного режима полива на основе фильтрационных свойства почвы осуществляется посредством корректировки упомянутых параметров времени продолжительности открытия крана форсунки и скважности ее работы.
Способ дополнительно содержит этапы, на которых:
определяют горизонтальные фильтрационные свойства почвы, характеризующие анизотропность почвы на по меньшей мере одном участке полива;
корректируют по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом определенных горизонтальных фильтрационных свойств почвы данного участка полива;
уточняют в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива.
Горизонтальные фильтрационные свойства почвы определяются на различной глубине.
Система управления дифференцированным поливом сельскохозяйственных культур, выполненная с возможностью формирования базы данных о поливаемом поле содержит:
средство разделения поля на участки произвольной формы, выполненное с возможностью определения координат участков полива по их границам;
по меньшей мере один датчик определения параметров окружающей среды и его местоположения, установленный в поле;
по меньше мере, одно средство полива сельскохозяйственных культур, каждое из которых содержит блок определения местоположения, блок обработки первоначальных данных, центральный блок и блок связи;
блок обработки первоначальных данных, выполненный с возможностью:
- получения первоначальных данных от по крайней мере одного датчика, характеризующих: координаты посаженных культур, первоначальную влажность почвы, и максимальные и минимальные значения влажности почвы на контролируемой глубине, при этом данные с датчиков поступают на блок обработки первоначальных данных посредством М2М технологии;
- получения первоначальных данных от средства разделения поля на участки произвольной формы, характеризующих: количество посаженных культур, координаты границ участков полива, нормы полива, при этом данные поступают со средства разделения поля на участки произвольной формы посредством сетей Wi-Fi или GSM.
- формирования цифровой карты полива, определяющей по меньшей мере один участок полива и по меньшей мере один режим полива участка полива на основе анализа полученных первоначальных данных;
центральный блок управления системой дифференциального полива сельскохозяйственных культур, выполненный с возможностью:
- дистанционного управления системой полива сельскохозяйственных культур для полива сельскохозяйственных культур в соответствии с цифровой картой полива;
- получения информации данных от по крайней мере одного датчика о действительных значениях влажности почвы на по меньшей мере одном участке полива на различной глубине, при этом данные с датчиков поступают на центральный блок посредством М2М технологии;
- определение момента закрытия крана форсунки при выполнении одного из условий: WIв ≥Wminв, WIв ≥Wmaxв, WIс ≥Wmaxс, WIс ≥Wminс, WIн ≥Wmaxн, WIн ≥Wminн, где WIв - текущее значение влажности верхнего уровня, WIс - текущее значение влажности среднего уровня; WIн - текущее значение влажности нижнего уровня; Wmaxв, Wminв - заданные значения max и min влажности верхнего уровня; Wmaxс, Wminс - заданные значения max и min влажности среднего уровня, Wmaxн, Wminн - заданные значения max и min влажности нижнего уровня;
- корректировки по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом действительных значений влажности почвы на по меньшей мере одном участке полива на различной глубине;
- корректировки в реальном времени цифровой карты полива в соответствии с уточненным по меньшей мере одним режимом полива;
- синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива;
- дистанционного управления упомянутой системой полива для полива сельскохозяйственных культур в соответствии с уточненной картой полива.
Центральный блок управления дополнительно выполнен с возможностью:
определения состояния сельскохозяйственных культур на по меньшей мере одном участке полива;
корректировки по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом состояния сельскохозяйственных культур на участке полива.
Центральный блок управления дополнительно выполнен с возможностью:
определения микроэлементного состава почвы; и
корректировки по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом микроэлементного состава почвы участка полива.
Центральный блок управления дополнительно выполнен с возможностью формирования команд для внесения удобрений на основе состояния сельскохозяйственных культур или микроэлементного состава почвы, соответственно.
Центральный блок управления дополнительно выполнен с возможностью:
определять влажность, рН и температуру почвы на различной глубине;
определять температуру и влажность воздуха;
корректировать по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом рН, влажности и температуры почвы на участке полива.
По меньшей мере один режим полива включает параметры времени продолжительности открытия крана форсунки и скважности ее работы,
причем центральный блок управления дополнительно выполнен с возможностью:
корректировки по меньшей мере одного режима полива на основе фильтрационных свойства почвы посредством корректировки упомянутых параметров времени продолжительности открытия крана форсунки и скважности ее работы.
Центральный блок управления дополнительно выполнен с возможностью:
определения горизонтальных фильтрационных свойств почвы, характеризующих анизотропность почвы на по меньшей мере одном участке полива;
корректировать по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом определенных горизонтальных фильтрационных свойств почвы данного участка полива;
уточнять в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива.
Горизонтальные фильтрационные свойства почвы определяются на различной глубине.
В системе применена технология сбора, хранения, и обработки Big Data, которая формирует большой массив как структурированных, так и не структурированных данных о поле, с целью принятия конкретных решений о необходимости адресного и точечного внесения минеральных удобрений и полива.
На основе полученной базы знаний центральный блок управления системой, посредством машинного обучения, может самостоятельно формировать оптимальные режимы полива и внесения удобрений для конкретных растений и управлять механизмами.
Для защиты применяется технология Blockchain для хранения баз данных и удаленного управления дифференцированной подачи воды и минеральных удобрений, а также диспетчеризации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
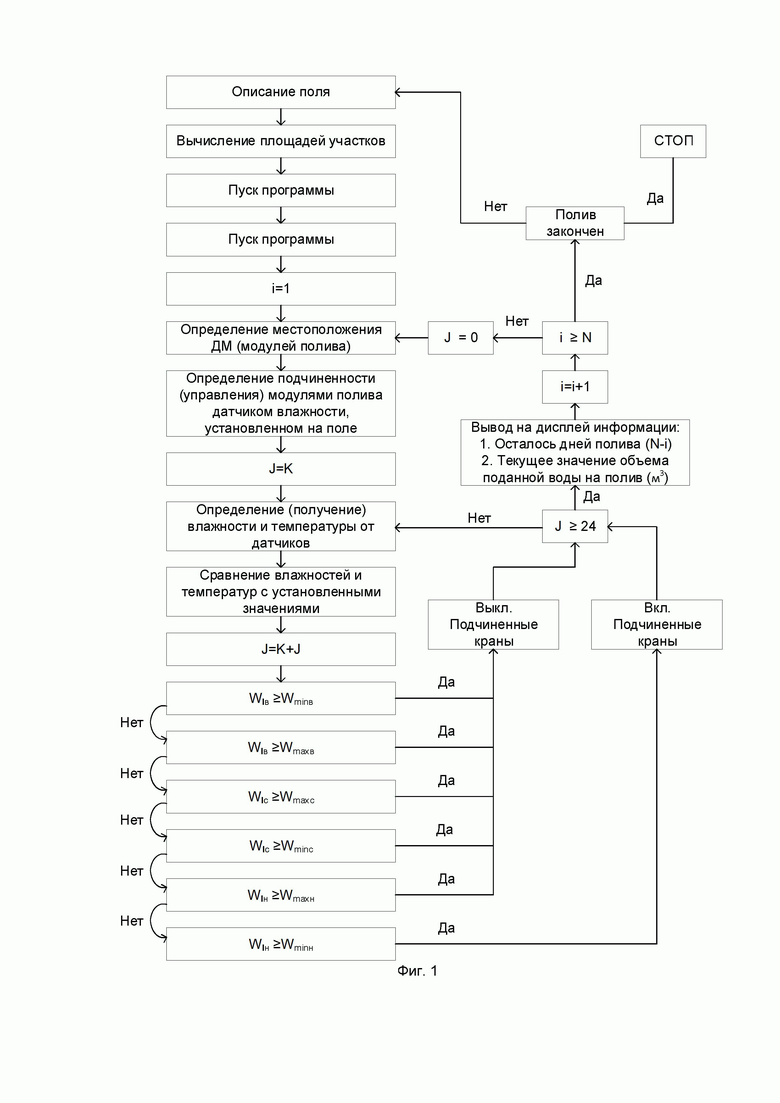
Фиг. 1 - Блок-схема работы системы.
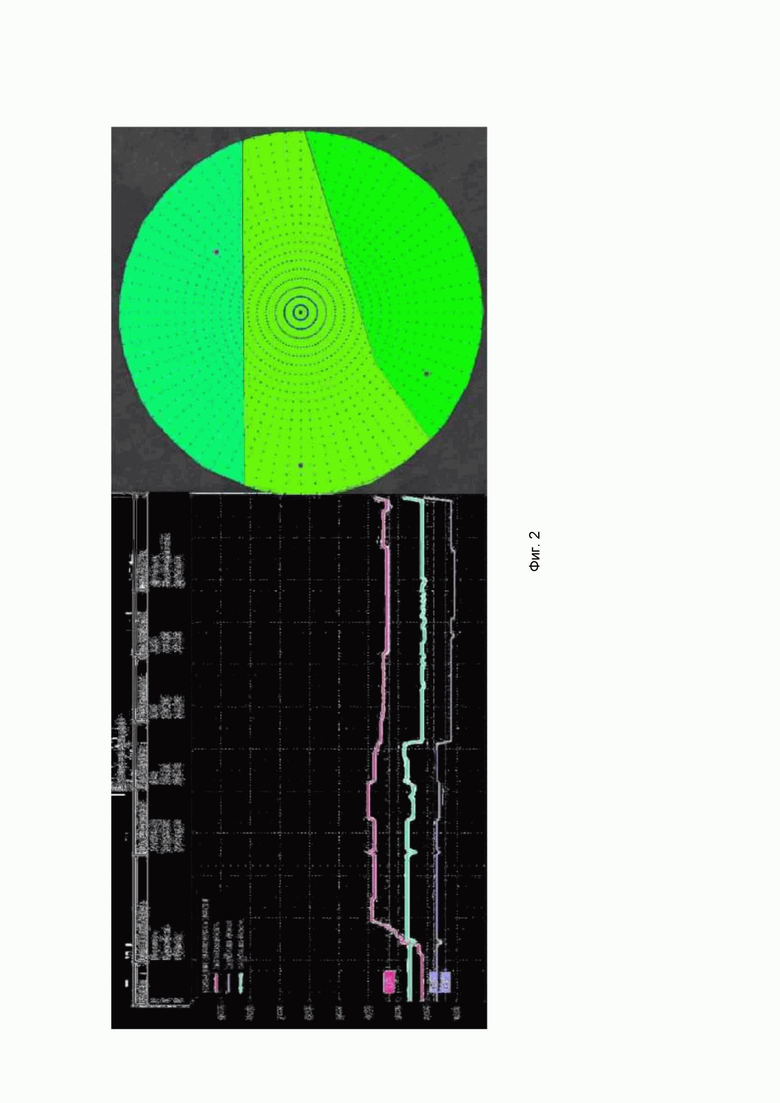
Фиг. 2 - Интерфейс контроля работы системы.
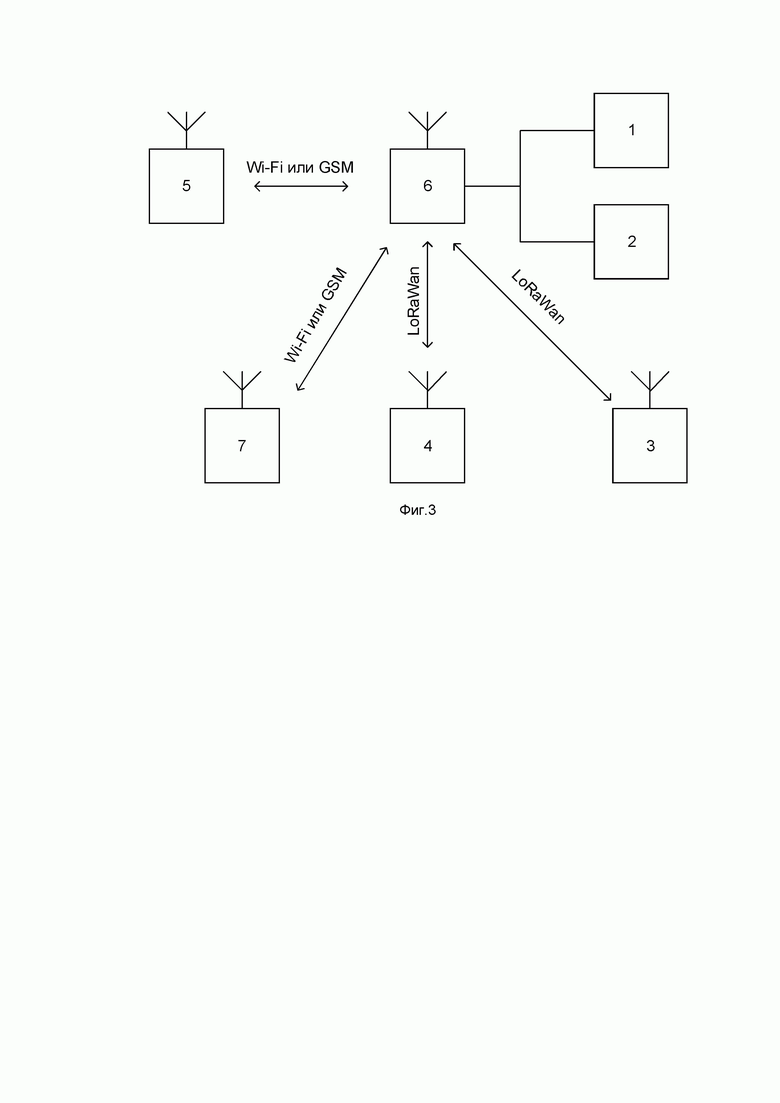
Фиг. 3 - Блок-схема системы.
Фиг. 4 - Модель распределенной обработки Big Data по управлению дифференцированным поливом.
1 - блок обработки первоначальных данных; 2 - центральный блок управления; 3 - датчик определения параметров окружающей среды и его местоположения; 4 - форсунки; 5 - средство разделения поля на участки; 6 - блок связи; 7 - средство управления и контроля; WIв - текущее значение влажности верхнего уровня, WIс - текущее значение влажности среднего уровня; WIн - текущее значение влажности нижнего уровня; Wmaxв, Wminв - заданные значения max и min влажности верхнего уровня; Wmaxс, Wminс - заданные значения max и min влажности среднего уровня, Wmaxн, Wminн - заданные значения max и min влажности нижнего уровня; K - интервал передачи данных от датчика (в часах); i - счетчик дней полива; J - счетчик циклов измерений в часах.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Система управления дифференцированным поливом с/х культур содержит средство разделения поля на участки произвольной формы, выполненное с возможностью определения координат участков полива по их границам, по меньшей мере один датчик (3) определения параметров окружающей среды и его местоположения, установленный в поле и по меньше мере, одно средство полива, каждое из которых содержит блок определения местоположения, блок (1) обработки первоначальных данных, центральный блок (2) дифференцированного полива с/х культур и блок связи. В качестве средства полива применяют ДМ «Фрегат», «Reinke», «TL Irrigation».
Средство (5) разделения поля на участки произвольной формы представляет собой смартфон, планшет, ноутбук или другое средство, оснащенное приемником систем GPRS или ГЛОНАСС, передатчиком данных по каналу связи Wi-Fi или GSM.
Датчик (3) определения параметров окружающей среды и его местоположения представляет собой датчик влажности и температуры почвы, установленный на поле в почву на глубину 60 см и оснащенный приемником систем GPRS или ГЛОНАСС и передатчиком данных посредством М2М технологии, например по протоколу LoRaWan. Датчики (3) представляют собой автономный блок, питающийся от аккумулятора и солнечной батареи
Связанные между собой (проводной связью) центральный блок (2) управления и блок (1) обработки первоначальных данных реализованы на базе микрокомпьютера Raspberry Pi3. Центральный блок (2) управления и блок (2) обработки первоначальных данных связаны (проводной связью) с блоком (6) связи, который представляет собой приемопередатчик данных посредством каналов связи GSM, Wi-Fi и LoRaWan.
Блок определения местоположения представляет собой приемник систем GPRS или ГЛОНАСС, который передает координаты местоположения ДМ на центральный блок (2) управления при помощи проводной связи.
Управление и контроль ДМ осуществляют удалено через диспетчерский пункт, оснащенный средством (7) управления и контроля. Средство (7) управления и контроля представляет собой, например, стационарный компьютер, ноутбук, планшет и т.п., оснащенное приемопередатчиком, обеспечивающим по каналу связи GSM или Wi-Fi передачу данных.
В системе применена технология сбора, хранения, и обработки Big Data, которая формирует большой массив как структурированных, так и не структурированных данных о поле, с целью принятия конкретных решений о необходимости адресного и точечного внесения минеральных удобрений и полива.
В основе примененной технологии Big Data по управлению дифференцированным поливом сельскохозяйственных культур, лежат следующие основные принципы:
 Масштабируемость в пропорции роста данных порядка - 2
Масштабируемость в пропорции роста данных порядка - 2
 Учет потерь данных датчиков без значимых последствий
Учет потерь данных датчиков без значимых последствий
 Локализация обработки данных на одной машине
Локализация обработки данных на одной машине
Способ анализа данных включает:
- Классификация данных о состоянии поля, растения с применением классических математических алгоритмов, таких как стохастический, статистический, дисперсионный и спектральный анализ временных рядов данных полученных от датчиков;
- Неограниченное количество поступающих данных от датчиков, определяемое скважностью передачи сигнала оператором;
- Сплит-тестирование данных по влажности почвы на различных глубинах (W1, W2, W3), температуры (t01 и t02), (скорости фильтрации V и Vi), (географические координаты положения дождевальной машины N, Е), кислотность, определение факторов оказывающих влияние.
Сплит-тестировании - сравнение эффективности применения технологии дифференцированного полива (графиков подачи воды и минеральных удобрений) с принятием наиболее подходящего. Время получения результатов зависит от особенностей применения графика полива (продолжительности и интенсивности полива, цикличности подачи воды) и основных факторов, влияющих на изменение состояние почвы, растения и составит не менее 2-3-х циклов полива дождевальной машиной. Данные собранные за период проведения поливов дождевальной машиной, определяют наиболее приемлемый график подачи воды на поле, т.е. количество включенных форсунок и продолжительность их работы. Основными факторами, влияющими, на принятие решения являются - время подачи воды, которое необходимо для достижения контролируемой глубины, а так же величины контролируемого процента влажности почвы. Другим фактором является дифференцируемый по площади полива, объем поданной воды на участки поля. Оценка вариативности изменения кислотности почвы в заданном диапазоне, за циклы полива и определение функции ее связи с объемом подаваемой воды на поле.
На основе полученной базы знаний центральный блок управления системой, посредством машинного обучения, может самостоятельно формировать оптимальные режимы полива и внесения удобрений для конкретных растений и управлять механизмами.
- Прогнозирование - определение изменения состояния поля (первоначальная и остаточная влажность, химический состав и кислотность почвы, и др.) на основе полученных большого количества данных от датчиков;
- Машинное обучение - обработка несистематизированных данных для последующего самостоятельного управления поливом. Машинное обучение осуществляют при помощи нейронной сети, которая обрабатывает набор первоначальных данных о поле и набор текущих данных о поле.
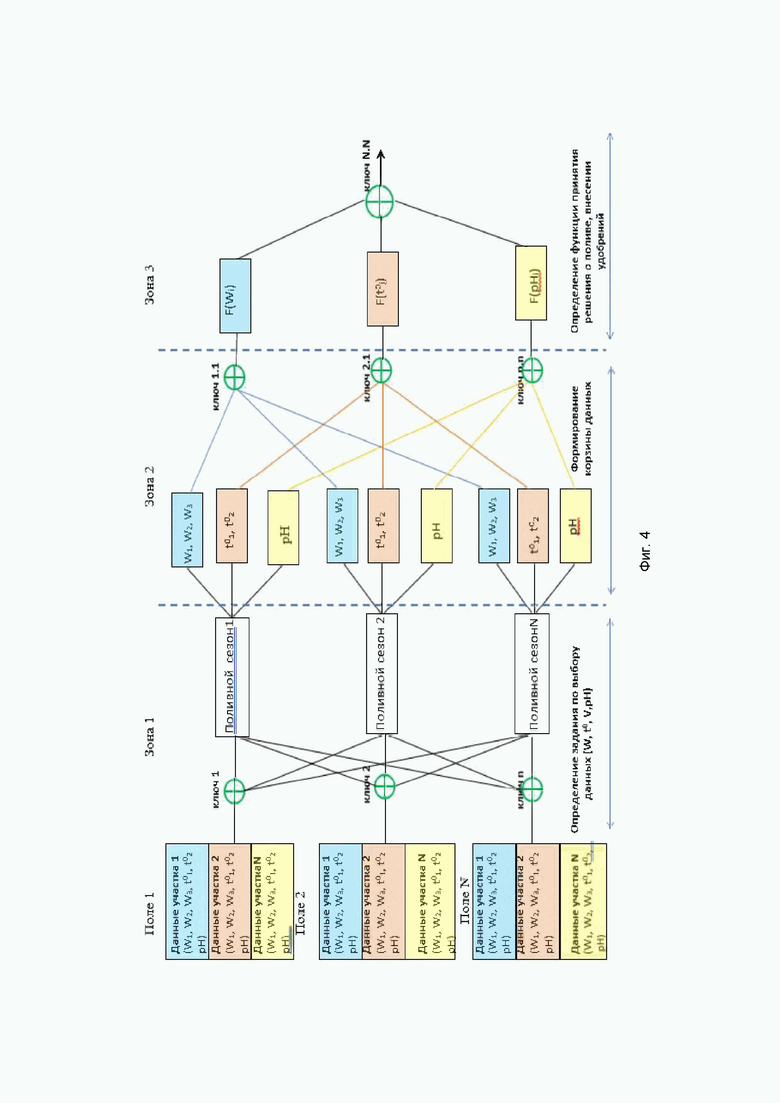
На Фиг. 4 приведена модель распределенной обработки данных, поступающих от датчиков, на основе технологии Big Data. Модель состоит из трех зон:
Зона 1 - Определение задания по выбору анализируемых параметров (влажность на разных глубинах W1, W2, W3, температура на глубине и поверхности почвы t01, t02, географические координаты машины N, Е, скорость фильтрации V, дата поливного сезона, вид с/х культуры, номер поля, номер участка и др.). Формирование - Ключей 1.
Зона 2 - Формирование корзины данных - разделение по контролируемым параметрам, формирование Ключей 2.
Зона 3 - Определение функции принятия решений - Определяется вид функциональной зависимости изменений контролируемых параметров на текущий момент времени, производиться ее (функция) сопоставление с видом функции, определенной на предшествующем этапе полива поля дождевальной машиной. Определяется различие между этими функциями, сравнение с нормативными данными, проводиться корректировка функции и принимается решение на включение форсунок, подающих воду для полива поля. Определилась функция принятия решения на осуществление полива. С корректированный вид функции определяется как актуальный и записывается в память машины. Последующее управление работой дождевальной машины может начинаться с этого вида функции или управляться оператором индивидуально. Формируется Ключ N,N, который является базовым для управления работой машины. Последующие результаты обработки данных работы дождевальной машины проходят это же цикл (Зона 1 - Зона 3), тем самым производиться «машинное обучение» по управлению работы дождевальной машиной.
Для защиты применяется технология Blockchain для хранения баз данных и удаленного управления дифференцированной подачи воды и минеральных удобрений, а также диспетчеризации.
При обращении к файлу функции управления (Ключ N - ключ отличающийся от созданного добавлением к нему даты и времени его применения) производиться проверка всех созданных на ранних стадиях Ключах. Происходит обновление всей цепочки с одновременным внесением в общий реестр, тем самым производится подтверждение, т.е. валидация. После валидации создается новое звено, которое имеет свой уникальный ключ, с которым оператор производит управление машиной. Таким образом, оператор осуществляет управление работой дождевальной машиной при помощи «копии» файла функции управления входящего в общую цепочку, который имеет ключ, отличающийся от созданного добавлением к нему даты и времени его применения.
При осуществлении удаленным управлением работой дождевальной машины, а также реализации функций диспетчеризации, передача сигналов управления происходит по каналам связи GSM. Для этого необходимо зайти через IP-адрес на встроенный в центральный блок микрокомпьютер, и расположенный там сайт с программой, что позволяет, через систему доступа, обращаться к файлу функции управления и осуществлять необходимые настройки и в реальном масштабе времени управлять подачей воды.
Работа системы управления дифференцированным поливом с/х культур осуществляется следующим образом.
На первом этапе осуществляется сбор данных о поле (описание поля) и разбивки поля на участки полива произвольной формы. Для разбивки поля на участки оператор с использованием средства (5) разделения поля на участки, оснащенного приемником систем GPRS или ГЛОНАСС, подходит к предполагаемой границе полива, далее оператор, проходя по периметру предполагаемой границы, производит определение GPS координат границ участка полива, в память средства (5) разделения поля на участки сохраняется информация о координатах границ участков. Для описания поля оператором в память средства (5) разделения поля на участки вводится информация о норме полива и количестве посаженных культур. При помощи встроенного в средство разделения поля на участки передатчика, осуществляют передачу первоначальных данных из памяти при помощи канала связи Wi-Fi или GSM на блок (1) обработки первоначальных данных через блок (6) связи, при этом к первоначальным данным относятся: количество посаженных культур, координаты границ участков полива, нормы полива.
Кроме того, для описания поля с датчиков (3) по каналу связи LoRaWan на блок (1) обработки первоначальных данных через блок (6) связи осуществляется передача первоначальных данных, характеризующих: координаты посаженных культур, первоначальную влажность почвы, и максимальные и минимальные значения влажности почвы на контролируемой глубине.
Затем поскольку для различных с/х культур требуется различное количество воды и минеральных удобрений, то блок (1) обработки первоначальных данных на основе анализа полученных данных рассчитывает площадь участка и режим полива (орошения), в частности, определяет нормы, сроки и число поливов, продолжительность поливных и междоливных периодов для с.-х. культур, и формирует цифровую карту полива, определяющую по меньшей мере один участок полива и по меньшей мере один режим полива данного участка полива. При определении по меньшей мере одного участка полива также учитываются параметры оросительных средств, в том числе параметры форсунок, установленных на поливальных машинах, в частности, их скважность, область охвата и максимальный объем воды, которым они способны обеспечить участок поля. Информация о параметрах оросительных средств также могут поступать на блок 1 обработки первоначальных данных из памяти средства (5) разделения поля на участки.
Сформированная карта полива затем передается в центральный блок (2) управления, который осуществляет пуск программы полива с учетом параметров форсунки таким образом, чтобы обеспечить поступление требуемого количества воды и минеральных удобрений для посаженных с/х культур в соответствии с режимом полива, после чего осуществляется перемещение ДМ по крайней мере по одному участку полива. В течение периода времени (i=1) при перемещении ДМ по участку полива, центральный блок определяет местоположение ДМ на основе координат GPRS или ГЛОНАСС, синхронизирует местоположение ДМ с цифровой картой полива или положением ДМ на поле, при этом на основе данных, полученных от датчиков (3) на участке по линии связи последовательно выдает «адресные» сигналы на исполнительные модули полива ДМ, открывая или закрывая форсунки моторизованными (подчиненными) кранами, таким образом осуществляются определение принадлежности модулей полива к участкам, определение подчиненности (управления) модулями полива датчиком влажности, т.е. обеспечивая таким образом управление системой дифференцированного полива сельскохозяйственных культур для полива сельскохозяйственных культур в соответствии с цифровой картой полива. Форсунки расположены последовательно на трубе ДМ через 5-10 метров. При переходе на граничный участок изменения режима полива, центральный блок (2) управления опять последовательно передает сигналы управления на краны в соответствии с заложенным режимом полива в карте полива. Таким образом, центральный блок (2) управления постоянно контролирует участки полива и выполняет управление поливальными форсунками в соответствии с заложенной картой полива.
Управление ДМ осуществляется оператором удалено через диспетчерский пункт при помощи средство (7) управления и контроля, интерфейс контроля работы системы управления дифференцированным поливом с/х культур отображается на дисплее средство (7) управления и контроля. Вид интерфейса представлен на Фиг. 1, который наглядно отображает все необходимые параметры системы дифференцированного полива. Средство (7) управления и контроля по каналу связи Wi-Fi или GSM передает сигналы управления на центральный блок (2) управления. При необходимости в любой момент времени оператор может вмешаться в выполняемую карту полива при помощи средства (7) управления и контроля, выбрав номер поливальной машины (при работе с несколькими ДМ одновременно), номер форсунки и режим - «открыть» или «закрыть». При получении команды центральным блоком (2) управления от средства (7) управления и контроля по каналу связи Wi-Fi или GSM, выполняемая программа полива останавливается на время выполнения команды, а после выполнения (открытия или закрытия выбранных форсунок), продолжается дальше.
При перемещении ДМ задается счетчик (интервал) циклов измерений (J=K, при K=1,0-24 часа), при котором датчики (3) по периодическому запросу от центрального блока (2) управления в заданный период времени (K) по каналу связи LoRaWan осуществляют передачу данных о влажности и температуре на разных глубинах почвы. Таким образом организована обратная связь системы с поливаемым полем и его отдельными участками. После прохождения первого полива центральным блоком (2) управления фиксируется время его начала и спустя время (J=J+K), соответствующее первому измерению, датчики (3) передают по каналу связи LoRaWan измеренные действительные значения влажности и температуры, например, на 2-3 глубинах в почве: 5 см, 40 см, 60 см, на центральный блок 2 управления. На основе полученных действительных значений влажности и температуре на разных глубинах почвы центральным блоком (2) управления проверяется выполнение условия 1 - WIв ≥Wminв. В случае выполнения условия 1, центральный блок (2) управления по каналу связи LoRaWan подает на исполнительные модули сигнал на закрытие (выкл.) подчиненных кранов форсунок ДМ. В случае невыполнения условия 1, центральным блоком (2) управления проверяется выполнение условия 2 - WIв ≥Wmaxв. В случае выполнения условия 2, центральный блок (2) управления по каналу связи LoRaWan подает на исполнительные модули сигнал на закрытие (выкл.) подчиненных кранов форсунок ДМ. В случае невыполнения условия 2, центральным блоком (2) управления проверяется выполнение условия 3 - WIс ≥Wmaxс В случае выполнения условия 3, центральный блок (2) управления по каналу связи LoRaWan подает на исполнительные модули сигнал на закрытие (выкл.) подчиненных кранов форсунок ДМ. В случае невыполнения условия 3, центральным блоком (2) управления проверяется выполнение условия 4 - WIс ≥Wminс. В случае выполнения условия 4, центральный блок (2) управления по каналу связи LoRaWan подает на исполнительные модули сигнал на закрытие (выкл.) подчиненных кранов форсунок ДМ. В случае невыполнения условия 4, центральным блоком (2) управления проверяется выполнение условия 5 - WIн ≥Wmaxн. В случае выполнения условия 5, центральный блок (2) управления по каналу связи LoRaWan подает на исполнительные модули сигнал на закрытие (выкл.) подчиненных кранов форсунок ДМ. В случае невыполнения условия 5, центральным блоком (2) управления проверяется выполнение условия 6 - WIн ≥Wminн. В случае выполнения условия 6, центральный блок (2) управления по каналу связи LoRaWan подает на исполнительные модули сигнал на закрытие (выкл.) подчиненных кранов форсунок ДМ. В случае невыполнения условия 6, центральный блок (2) управления по каналу связи LoRaWan подает на исполнительные модули сигнал на открытие (вкл.) подчиненных кранов форсунок ДМ. Проверка соответствия условиям 1-6 обеспечивает сравнение измеренных значений влажности и температуры на разных глубинах почвы с установленными (эталонными) значениями, что позволяет в режиме реального времени реализовать технологию адресной и точечной поставки воды и минеральных удобрений каждому растению, определить объемов подачи воды и минеральных удобрений на участки поливаемого дождевальной машиной поля, осуществлять корректировку карты полива; исключить образования луж (переувлажнением почвы). Получение центральным блоком (2) управления данных от датчиков в необходимый момент времени с заданной периодичностью (К), сравнение измеренных значений влажности и температуры на разных глубинах почвы с установленными (эталонными) значениями, проверку соответствия условий 1-6 и передачу сигналов на исполнительные модули осуществляют в течение не менее 24 часов. За это время формируются базы данных по поливаемому ДМ, на основании которых осуществляется протоколирование результатов полива дождевальной машиной (протоколы, отчеты, графики, таблицы и др.).
При J≥24 центральный блок (2) управления по каналу связи GSM или Wi-Fi передает на средство (7) управления и контроля следующие данные о поле: 1. Осталось дней полива (N-i); 2. Текущее значение объема поданной воды на полив (м3). Указанные данные отображаются на дисплее на средства (7) управления и контроля.
После наступления следующих суток полива (i=i+1) счетчик циклов измерений J обнуляется (J=0) и осуществляется повторение следующих этапов: перемещение ДМ в соответствии с программой полива, при котором осуществляется определение местоположение ДМ, определение принадлежности модулей полива к участкам, определение подчиненности (управления) модулями полива датчиком влажности; определение влажности и температуры на разных глубинах почвы с заданной периодичностью; сравнение измеренных значений влажности и температуры на разных глубинах почвы с установленными (эталонными) значениями; проверку соответствия условий 1-6 и передачу сигналов на исполнительные модули; проверка соответствия условию J≥24 и передачу данных о поле, до момента, когда i≥N.
В случае выполнения условия i≥N, центральным блоком (2) управления принимается решение об окончании полива. В случае определения влажности, близкой к 80-100%, центральный блок подает команду на остановку ДМ, что приводит к прекращению полива, если влажность менее 80% осуществляется повторение операций работы системы, описанных выше, от описания поля до принятия решения об окончании полива.
Также центральным блоком (2) управления фиксируется время до стабилизации измененных значений влажности по глубине. При известных (фиксированных) положениях датчиков влажности по глубине почвы Si и определенном времени фильтрации Т=Тн-Тк, где Тн и Тк время начала полива и время стабилизации значений влажности, соответственно, определяется скорость прохождения профильтровавшейся воды в почву V, т.е. V=Si/T.
Полученная величина V характеризует фильтрационные свойства почвы в реальном масштабе времени (коэффициент фильтрации). Таким образом, зная местоположение датчиков, центральный блок (2) управления определяет фильтрационные свойства почвы для каждого участка полива карты полива, и корректирует по меньшей мере один режим полива на по меньшей мере в одном участке полива с учетом фильтрационных свойства почвы участка полива. Далее центральный блок (2) управления корректирует в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива, рассчитывает новые параметры времени продолжительности открытия крана форсунки и скважности ее работы для корректировки объема подачи воды для посаженных с/х культур и осуществляет управление упомянутой системой дифференцированного полива для полива сельскохозяйственных культур, таким образом, предотвращая образование поверхностного стока, а также пересыхания почвы, которые могли бы возникнуть, если бы полив был осуществлен без учета фильтрационных свойств почвы.
Дополнительно к датчику (3), осуществляющего измерение влажности, может быть подсоединен дополнительный выносной элемент, который устанавливается в почву на выбранном расстоянии от основного датчика влажности. Расстояние определяется пользователем самостоятельно и ограничивается только длиной соединительного провода. Установленные на поле выносные элементы также определяют действительные значения влажности на контролируемых местах и глубинах и предают эти данные в центральный блок (2) управления. Аналогичным путем центральный блок (2) управления определяет скорость Vi прохождения воды в почву на участке, где установлен выносной элемент, который присоединен к основному датчику, и определяет горизонтальные фильтрационные свойства почвы, характеризующие анизотропность почвы, выраженные в виде коэффициента горизонтальной фильтрации, рассчитанного, например, по формуле:
где V и Vi - соответственно скорость фильтрации, определенная датчиком (3) и его выносным элементом, m и mi - соответственно глубина, на которой производится измерение влажности, L - расстояние между основным датчиком и присоединенным элементом.
Зная фильтрационные свойства почвы в реальном масштабе времени и горизонтальные фильтрационные свойства почвы, центральный блок управления может определить коэффициент анизотропии почвы, представляющий собой коэффициент корреляции (К) между свойством, определенным по горизонтали и тем же свойством, определенным по вертикали. Величина анизотропии, ее направленность (градиент) учитывается при оценке характера распределения физических свойств почв, процессов, их формирующих, а также при трансформации различных почвенных образований. Определение в реальных условиях закономерностей анизотропии позволяет учитывать водо и энергораспределение в почве, процессы в почве, более корректно оценить условия образования и трансформации почвенной структуры, пространственные закономерности анизотропии, неоднородности механических и других почвенно-физических свойств. Кроме того, анизотропия определяет объективные условия формирования основных запасов веществ и позволяет количественно оценить закономерности анизотропии почвенно-физических свойств поливаемого поля и процессов, как обязательного элемента устойчивого функционирования почв в биосфере, внося поправку в показания влажности датчика влажности на контролируемой глубине. Например, если показания основного датчика влажности составит Х%, а данные полученные от вспомогательного датчика (выносной элемент), подключенного к основному датчику и установленному в почву на некотором расстоянии) составят Y%, тогда определенный коэффициент корреляции между ними Kxy позволит определить распределение влажности по площади на контролируемой глубине почвы в любой точке поливаемого участка. Это позволяет с высокой степенью дифференциации (точечно) устанавливать площадную влажность почвы и проводить точечный и дозированный полив участков поля. Определение коэффициента горизонтальной фильтрации (анизотропии), так же корректирует значение, полученное от датчика, и составит Х%+- Kxy*Х%. На основании этого результата центральный блок 2 управления корректирует по меньшей мере один режим полива на по меньшей мере одном участке полива и уточняет в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива, определяет время продолжительности открытия крана форсунки и скважность ее работы, т.е необходимый объем подаваемой воды, в соответствии с уточненным по меньшей мере одним режимом полива, и осуществляет управление упомянутой системой дифференцированного полива для полива сельскохозяйственных культур в соответствии с уточненной картой полива.
Датчики (3) также могут быть выполнены с возможностью производит измерения влажности, рН и температуры почвы на различной глубине. Центральный блок (2) управления на основе полученной от датчиков упомянутой информации корректирует по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом рН, влажности и температуры почвы на данном участке полива. Например, в случае определения влажности, близкой к 80-100% происходит прекращение полива. Возобновление полива происходит после снижения замеренной датчиком влажности до заданной величины. По достижении влажности 80-100% полив прекращается. Таким образом, происходит дополнительный контроль за недопущением образования луж.
Также центральный блок (2) управления может получать из соответствующей базы дынных информацию о состоянии с/х культур на по меньшей мере одном участке полива и информацию о микроэлементном составе почвы. Состояние с/х культур и микроэлементный состав почвы могут быть определены путем спектрального анализа с/х культур и почвы методами, широко известными в уровне техники. На основе полученной информации центральный блок (2) управления корректирует по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом состояния сельскохозяйственных культур на участке полива и с учетом микроэлементного состава почвы участка полива. Дополнительно центральный блок (2) управления может формировать команды для внесения удобрений на основе состояния сельскохозяйственных культур или микроэлементного состава почвы соответственно. Удобрения могут подаваться вместе с поливной водой, либо с помощью специальных дополнительных средств, которыми может быть оснащена поливальная машина.
В результате обратной связи между центральным блоком (2) управления и датчиком (3) при работе ДМ формируется база данных о поливаемом поле, в том числе для каждого участка поля. База данных формирует информацию о влажности, температуре, фильтрационных свойствах почвы в вертикальном и в горизонтальном распределении. Полученная база данных позволяет проводить экспертную оценку всего поливаемого поля и осуществлять прогноз изменения контролируемых величин (влажности, фильтрации, температуры почвы) во времени, а также позволяет вносить изменения в режим полива, путем фьючерсного прогноза участка поля, следующего за поливаемым. Тем самым, производится дополнительный учет времени «добегания» влажности до контролируемой глубины полива участков поля. Сформированная база данных пополняется после каждого оборота или каждого прохода дождевальной машины и корректирует базу данных.
Таким образом, синхронизация положения ДМ на поле с цифровой картой, формирование базы данных, наличие обратной беспроводной связи с поливаемым полем и его отдельными участками, обеспечивающая формирование базы данных о поливаемом поле, позволяет в режиме реального времени осуществить технологии адресной и точечной поставки воды и минеральных удобрений каждому растению, что позволяет повысить точность дифференцированного полива с/х культур.
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как оно раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многосекционная дождевальная машина кругового действия с интеллектуальным модулем | 2020 |
|
RU2755688C2 |
| Автоматизированная оросительная система | 1984 |
|
SU1217312A1 |
| АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2007 |
|
RU2354110C1 |
| Способ предуборочной десикации посевов сельскохозяйственных культур переменной нормой внутри одного поля | 2019 |
|
RU2717933C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| СПОСОБ МЕЛИОРАЦИИ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛИВОМ | 2007 |
|
RU2355162C1 |
| Дождевальная машина для прецизионного орошения | 2023 |
|
RU2814260C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ОРОСИТЕЛЬНОЙ ВОДЫ ПРИ ПОЛИВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2722032C1 |
| СПОСОБ МЕЛИОРАЦИИ И ПОВЫШЕНИЯ ПЛОДОРОДИЯ ПОЧВЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402197C1 |
| Автоматизированная оросительная система | 1985 |
|
SU1299548A1 |
Изобретение относится к технологии дифференцированного полива и решает задачи по дистанционному контролю и управлению подачей воды с учетом поливных норм для выращиваемых сельскохозяйственных (с/х) культур при применении различных видов оросительных систем. Для дифференцированного управления поливом разбивают поле на участки полива произвольной формы, имеющие различные выращиваемые культуры и разную первоначальную влажность почвы. Получают первоначальные данные при помощи средства разделения поля на участки произвольной формы посредством сетей Wi-Fi или GSM, характеризующие нормы полива и количество посаженных культур, координаты участков полива по их границам. Получают первоначальные данные с датчиков посредством М2М технологии, характеризующие координаты посаженных культур; первоначальную влажность почвы, максимальные и минимальные значения влажности почвы на контролируемой глубине. Формируют цифровую карту полива, определяющую по меньшей мере один участок полива и по меньшей мере один режим полива участка полива на основе анализа полученных первоначальных данных. Осуществляют полив сельскохозяйственных культур при помощи по меньшей мере одного средства полива в соответствии с цифровой картой полива, при синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива; получают информацию посредством М2М технологии о действительных значениях влажности почвы по меньшей мере одного участка полива на различной глубине, обеспечивающую формирование базы данных о поливаемом поле. Корректируют по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом действительных значений влажности почвы по меньшей мере одного участка полива на различной глубине. Уточняют в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива; осуществляют полив сельскохозяйственных культур при помощи по меньшей мере одного средства полива в соответствии с уточненной цифровой картой полива, при синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива, при этом в процессе полива осуществляют закрытие крана форсунки в случае выполнения одного из условий: WIв≥Wmaxв, WIс≥Wmaxс, WIн≥Wmaxн, где WIв - текущее значение влажности верхнего уровня, WIс - текущее значение влажности среднего уровня; WIн - текущее значение влажности нижнего уровня; Wmaxв - заданные значения max влажности верхнего уровня; Wmaxс - заданные значения max влажности среднего уровня, Wmaxн - заданные значения max влажности нижнего уровня. Обеспечивается повышение точности дифференцированного полива с/х культур. 2 н. и 17 з.п. ф-лы, 4 ил.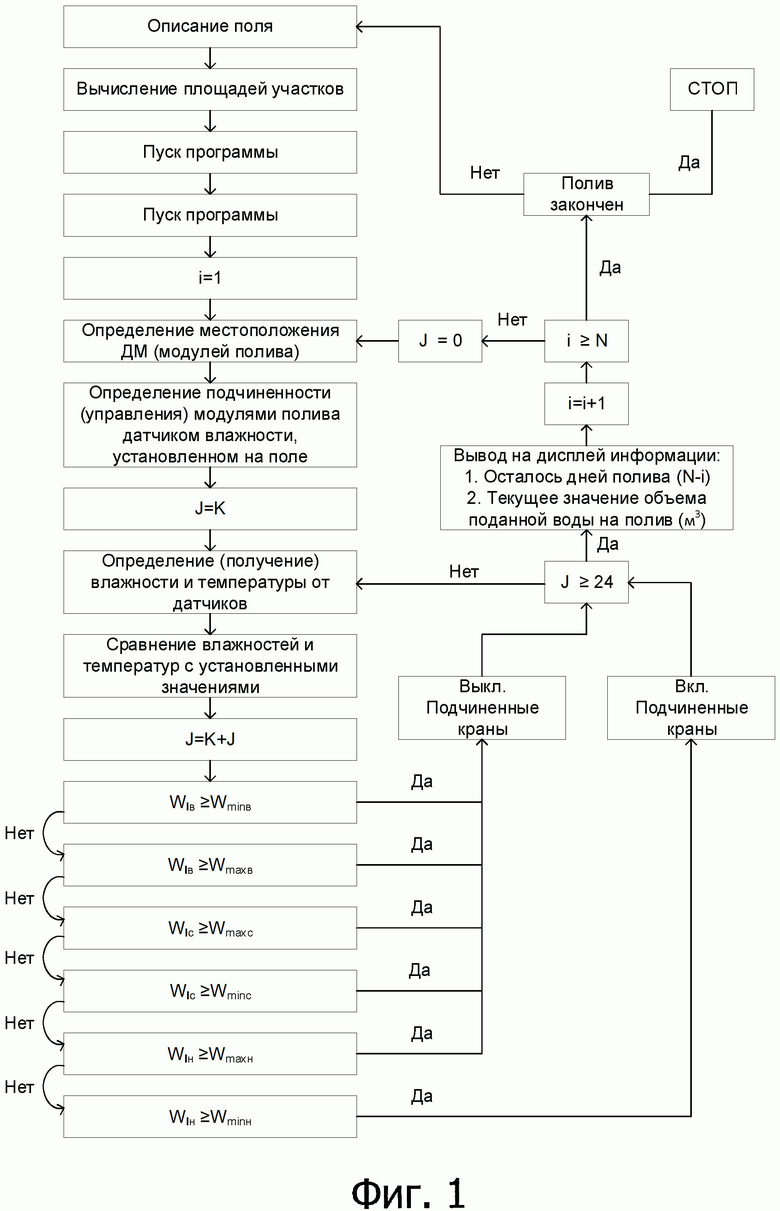
1. Способ управления дифференцированным поливом сельскохозяйственных культур, содержащий этапы, на которых: разбивают поле на участки полива произвольной формы, имеющие разные виды выращиваемых культур и разную первоначальную влажность почвы, получают первоначальные данные при помощи средства разделения поля на участки произвольной формы посредством сетей Wi-Fi, GSM, и LoRaWAN, характеризующие: значения влажности почвы для текущей стадии роста растений и количество посаженных культур, координаты участков полива по их границам; получают первоначальные данные с датчиков посредством беспроводной технологии, характеризующие: координаты посаженных культур; первоначальную влажность почвы; и максимальные и минимальные значения влажности почвы на контролируемых глубинах; контролируемые значения химических веществ или элементов; формируют цифровую карту полива, определяющую по меньшей мере один участок полива и по меньшей мере один режим полива участка полива на основе анализа полученных первоначальных данных; осуществляют полив сельскохозяйственных культур при помощи по меньшей мере одного средства полива в соответствии с цифровой картой полива, при синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива; получают информацию посредством беспроводной технологии о действительных значениях влажности почвы по меньшей мере одного участка полива на разных глубинах, обеспечивающую формирование базы данных о поливаемом поле; корректируют по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом действительных значений влажности почвы по меньшей мере одного участка полива на различных глубинах; уточняют в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива; осуществляют полив сельскохозяйственных культур при помощи по меньшей мере одного средства полива в соответствии с уточненной цифровой картой полива, при синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива, при этом в процессе полива осуществляют закрытие крана форсунки в случае выполнения одного из условий: WIв>Wmaxв, WIс>Wmaxс, WIн>Wmaxн, где WIв - текущее значение влажности верхнего уровня, WIс - текущее значение влажности среднего уровня; WIн - текущее значение влажности нижнего уровня; Wmaxв - заданные значения max влажности верхнего уровня; Wmaxс – заданные значения max влажности среднего уровня, Wmaxн - заданные значения max влажности нижнего уровня.
2. Способ по п. 1, отличающийся тем, что дополнительно содержит этап, на котором определяют состояние сельскохозяйственных культур на по меньшей мере одном участке полива, причем по меньшей мере один режим полива на по меньшей мере одном участке полива корректируют с учетом состояния стадии развития сельскохозяйственных культур на участке полива.
3. Способ по п. 1, отличающийся тем, что дополнительно содержит этап, на котором определяют микроэлементный состав почвы, причем по меньшей мере один режим полива на по меньшей мере одном участке полива корректируют с учетом микроэлементного состава почвы на участке полива.
4. Способ по любому из пп. 2 или 3, отличающийся тем, что содержит этап внесения удобрений на основе состояния сельскохозяйственных культур или микроэлементного состава почвы соответственно.
5. Способ по п. 1, отличающийся тем, что дополнительно содержит этап, на котором определяют pH и температуру почвы, причем по меньшей мере один режим полива по меньшей мере на одном участке полива корректируют с учетом кислотно-щелочного баланса pH и температуры почвы на участке полива.
6. Способ по п. 1, отличающийся тем, что по меньшей мере один режим полива включает параметры времени продолжительности открытия крана форсунки и скважности ее работы, причем корректировка по меньшей мере одного режима полива на основе фильтрационных свойства почвы осуществляется посредством корректировки упомянутых параметров времени продолжительности открытия крана форсунки и скважности ее работы.
7. Способ по п. 1, отличающийся тем, что дополнительно содержит этапы, на которых: определяют горизонтальные фильтрационные свойства почвы, характеризующие анизотропность почвы на по меньшей мере одном участке полива; корректируют по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом определенных горизонтальных фильтрационных свойств почвы данного участка полива; уточняют в реальном времени карту полива в соответствии с уточненным по меньшей мере одним режимом полива.
8. Способ по п. 8, отличающийся тем, что горизонтальные фильтрационные свойства почвы определяются на разной глубине.
9. Система управления дифференцированным поливом сельскохозяйственных культур, выполненная с возможностью формирования базы данных о поливаемом поле, содержащая: средство разделения поля на участки произвольной формы, выполненное с возможностью определения координат участков полива по их границам; по меньшей мере один датчик определения параметров окружающей среды и его местоположения, установленный в поле; по меньшей мере одно средство полива сельскохозяйственных культур, каждое из которых содержит блок определения местоположения, блок обработки первоначальных данных, центральный блок и блок связи; блок обработки первоначальных данных, выполненный с возможностью:
- получения первоначальных данных от по крайней мере одного датчика, характеризующих координаты посаженных культур, первоначальную влажность почвы и максимальные и минимальные значения влажности почвы на контролируемых глубинах, при этом данные с датчиков поступают на блок обработки первоначальных данных посредством беспроводной технологии с применением LoRaWAN;
- получения первоначальных данных от средства разделения поля на участки произвольной формы, характеризующих количество посаженных культур, координаты границ участков полива, нормы полива, при этом данные поступают со средства разделения поля на участки произвольной формы посредством сетей Wi-Fi или GSM,
- формирования цифровой карты полива, определяющей по меньшей мере один участок полива и по меньшей мере один режим полива участка полива на основе анализа полученных первоначальных данных; центральный блок управления системой дифференциального полива сельскохозяйственных культур, выполненный с возможностью:
- дистанционного управления системой полива сельскохозяйственных культур для полива сельскохозяйственных культур в соответствии с цифровой картой полива;
- получения информации данных от по крайней мере одного датчика о действительных значениях влажности почвы на по меньшей мере одном участке полива на различной глубине, при этом данные с датчиков поступают на центральный блок посредством беспроводной технологии;
- определения момента закрытия крана форсунки при выполнении одного из условий: WIв>Wmaxв, WIс>Wmaxс, WIн>Wmaxн, где WIв - текущее значение влажности верхнего уровня, WIс - текущее значение влажности среднего уровня; WIн – текущее значение влажности нижнего уровня; Wmaxв - заданные значения max влажности верхнего уровня; Wmaxс - заданные значения max влажности среднего уровня, Wmaxн - заданные значения max влажности нижнего уровня;
- корректировки по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом действительных значений влажности почвы на по меньшей мере одном участке полива на различной глубине;
- корректировки в реальном времени цифровой карты полива в соответствии с уточненным по меньшей мере одним режимом полива;
- корректировки в реальном времени цифровой карты полива в соответствии со стадией роста (развития) по меньшей мере одним режимом полива;
- синхронизации местоположения по меньшей мере одного средства полива с цифровой картой полива;
- дистанционного управления упомянутой системой полива для полива сельскохозяйственных культур в соответствии с уточненной картой полива.
10. Система по п. 9, отличающаяся тем, что центральный блок управления дополнительно выполнен с возможностью:
определения состояния сельскохозяйственных культур на по меньшей мере одном участке олива;
корректировки по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом состояния сельскохозяйственных культур на участке полива.
11. Система по п. 9, отличающаяся тем, что центральный блок управления дополнительно выполнен с возможностью определения микроэлементного состава почвы и корректировки по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом микроэлементного состава почвы участка полива.
12. Система по любому из пп. 10 или 11, отличающаяся тем, что центральный блок управления дополнительно выполнен с возможностью формирования команд для внесения удобрений на основе состояния сельскохозяйственных культур или микроэлементного состава почвы соответственно.
13. Система по п. 9, отличающаяся тем, что центральный блок управления дополнительно выполнен с возможностью:
определять влажность, pH и температуру почвы на различной глубине;
определять температуру и влажность воздуха;
корректировать по меньшей мере один режим полива на по меньшей мере одном участке полива с учетом pH, влажности и температуры почвы на участке полива.
14. Система по п. 9, отличающаяся тем, что по меньшей мере один режим полива включает параметры времени продолжительности открытия крана форсунки и скважности ее работы, причем центральный блок управления дополнительно выполнен с возможностью: корректировки по меньшей мере одного режима полива на основе фильтрационных свойств почвы посредством корректировки упомянутых параметров времени продолжительности открытия крана форсунки и скважности ее работы.
15. Система по п. 9, отличающаяся тем, что центральный блок управления дополнительно выполнен с возможностью: определения горизонтальных фильтрационных свойств почвы, характеризующих анизотропность почвы на по меньшей мере одном участке полива; корректировки, по меньшей мере одного режима полива на по меньшей мере одном участке полива с учетом определенных горизонтальных фильтрационных свойств почвы данного участка полива; уточнения в реальном времени карты полива в соответствии с уточненным по меньшей мере одним режимом полива.
16. Система по п. 15, отличающаяся тем, что горизонтальные фильтрационные свойства почвы определяются на различной глубине, учет фильтрационных свойств почвы позволяет производить корректировку подачи необходимого количества воды для каждого конкретного растения.
17. Система по п. 9, отличающаяся тем, что применена технология сбора, хранения и обработки Big Data, которая формирует большой массив как структурированных, так и неструктурированных данных о поле, с целью принятия конкретных решений о необходимости адресного и точечного внесения минеральных удобрений и полива.
18. Система по п. 17, отличающаяся тем, что на основе полученной базы знаний центральный блок управления системой, посредством машинного обучения, может самостоятельно формировать оптимальные режимы полива и внесения удобрений для конкретных растений и управлять механизмами.
19. Система по п. 17, отличающаяся тем, что для защиты применяется технология Blockchain для хранения баз данных и удаленного управления дифференцированной подачей воды и минеральных удобрений, а также диспетчеризации.
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
| СПОСОБ БИОМЕЛИОРАЦИИ МАЛОПРОДУКТИВНЫХ ЛУГОВ И ДЕГРАДИРОВАННОЙ ПАШНИ ОРОСИТЕЛЬНЫХ СИСТЕМ | 2018 |
|
RU2691572C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ ВОДНОГО РЕЖИМА ОРОШАЕМОГО ПОЛЯ | 1992 |
|
RU2096949C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАСОЛЕННОСТИ ГРУНТОВ И/ИЛИ УРОВНЯ ГРУНТОВЫХ ВОД И ИХ МИНЕРАЛИЗАЦИИ | 1992 |
|
RU2048749C1 |
| Способ получения монокристаллов германия и кремния с заданным содержанием примесей | 1955 |
|
SU107450A1 |
| Железнодорожный снегоочиститель на глубину до трех сажен | 1920 |
|
SU263A1 |
| CN 108370802 A, 07.08.2018 | |||
| CN 109392676 A, 01.03.2019. | |||

