Изобретение относится к области машиностроения, в частности к средствам, предназначенным для наземного обслуживания воздушных судов, в том числе и беспилотных летательных аппаратов самолетного типа.
Известно малогабаритное устройство для буксирования воздушных судов [RU 2365524 C1, B64F 1/22, 27.08.2009 г. Бюл. №24], которое содержит буксировочную тележку, двигатель с редуктором, рулевой механизм, ведущий ролик с возможностью съема и привод управляемых колес.
Существующее устройство обладает рядом существенных недостатков таких как: ограничение по классу буксируемых воздушных судов, низкие тягово-сцепные качества, особенно при мокрой или скользкой опорной поверхности из-за проскальзывания ведущего ролика по отношению к колесу передней стойки воздушного судна, что также снижает возможность его применения в различных физико-географических условиях.
Известно устройство для буксировки самолетов [RU 2361786 С1, 20.07.2009 Бюл. №20] включающее: тягач, поворотную платформу, пневмотканевый подъемник, площадку, гидроцилиндр.
К недостаткам устройства можно отнести: большие габариты буксировщика, неравномерное распределение сцепного веса по ведущим мостам тягача, высокую трудоемкость процесса буксировки и отсутствие жесткой фиксации между тягачом и буксировщиком, что может привести к их расстыковке.
Известно также устройство, реализуемое в способе буксирования воздушного судна [RU 2194652 С2, B64F 1/22, 20.12.2002 г. Бюл. №35], содержащее тягач - подвижный электроагрегат, водило, несущее на конце захват, взаимодействующий с передней стойкой воздушного судна, буксировочные тележки, подсоединенные к основным шасси воздушного судна и преобразующие электрическую энергию, вырабатываемую спецоборудованием подвижного электроагрегата во вращательное движение колес воздушного судна, что делает их ведущими на время буксировки.
Однако это устройство при подстыковке буксировочных тележек к стойкам воздушного судна при помощи карданных валов не обеспечивает их жесткой фиксации относительно стоек, что существенно усложняет процесс буксировки.
Также используются малогабаритное устройство для буксирования воздушных судов [RU 2483988, B64F 1/22, 10.06.2013 г. Бюл. №16], содержащее: несущую раму, двигатель (силовой агрегат) с редуктором, гидравлический насос с распределителем, поворотную ось, рампу механизма подъема и фиксации колес передней стойки воздушного судна, гидравлические цилиндры, фиксатор, направляющие рампы с прорезями, механизм подъема и фиксации колес передней стойки воздушного судна, упор рампы для фиксации колес передней стойки воздушного судна.
К недостаткам данного устройства следует отнести высокую трудоемкость процесса буксировки так как, при управлении буксировщиком водитель не обеспечивает полный контроль над буксируемым средством, при этом вес от передней стойки воздушного судна распределяется по осям буксировочного устройства неравномерно, что влечет за собой быстрый износ и выход из строя частей и механизмов конструкции, воздействие на водителя-оператора вибрации при нахождении в кабине буксировщика.
Наиболее близким техническим решением, выбранным в качестве прототипа, является малогабаритное устройство для буксирования воздушных судов [RU 2645175, B64F 1/22, 16.02.2018 г. Бюл. №5], содержащее: приемник сигнала, микроконтроллер управления, источник питания, сервопривод управляемых колес, механизм фиксации колес передней стойки воздушного судна, включающий в себя гидроцилиндры и фиксатор, блок управления гидрораспределителем, блок управления силовым агрегатом, разъем резервного канала подключения кабеля к пульту, дистанционного управления буксировщиком, пульт дистанционного управления.
К недостаткам данного устройства следует отнести сложность механизма фиксации колес передней стойки воздушного судна, отсутствие механизма автоматического подъема и фиксации передней стойки воздушного судна на рампе, высокая трудоемкость и сложность процесса буксировки из-за отсутствия возможности автоматического управления, невозможности автоматической остановки при приближении к препятствию.
Техническим результатом изобретения является расширение функциональных возможностей управления устройством путем оборудования его датчиками приема сигнала от указателя маршрута, позволяющими буксировщику самостоятельно двигаться по размеченному на аэродромном покрытии маршруту, с возможностью ручного дистанционного управления на начальном и заключительном этапах буксировки, повышение надежности за счет упрощения конструкции и безопасности поскольку практически исключается участие человека в процессе буксировки, обеспечение максимальной эффективности при минимальных размерах устройства и парковочного пространства, обеспечение полного визуального контроля за всеми частями воздушного судна при буксировке так как оператор наблюдает за процессом со стороны, исключение возможности столкновения с препятствием за счет установления датчика контроля габаритного пространства в направлении движения перед буксировщиком, унификация, позволяющая использовать буксировщик для всех типов самолетов без переналадки оборудования поскольку предложенный механизм подъема и фиксации способен произвести стыковку с передней стойкой воздушных судов имеющих широкий спектр размеров шин, улучшение маневренности за счет использования системы бортового поворота, исключение воздействия на оператора вибрационных нагрузок, сокращение времени стыковки буксировщика с воздушным судном, за счет использования грузовой платформы выполненной в виде спрофилированного ковша.
Применение в малогабаритном буксировщике системы автоматического управления при движении по заданной траектории с использованием расположенной на поверхность аэродрома разметке позволяет осуществить процесс буксировки воздушного судна в автоматическом режиме, что обеспечивает возможность снизить трудозатраты и сократить количество обслуживающего персонала. Также предложенная система автоматического управления движением буксировщика обладает высокой помехоустойчивостью, что не позволит сбиться буксировщику с заданного маршрута и совершить наезд на препятствие.
Это достигается тем, что малогабаритный буксировщик воздушных судов оборудуется датчиками приема сигнала от указателя маршрута, электродвигателями с редукторами привода ведущих колес, блоком управления (например микроконтроллером с усилителем сигнала), датчиком определения расстояния до передней стойки воздушного судна при стыковке, датчиком контроля габаритного пространства в направлении движения буксировщика, датчиком контроля нахождения колес передней стойки воздушного судна в механизме подъема и фиксации, механизмом подъема и фиксации колес передней стойки воздушного судна, выполненным в виде спрофилированного ковша с возможностью поворота вокруг своей оси посредством сервопривода, сервопривод поворота ковша.
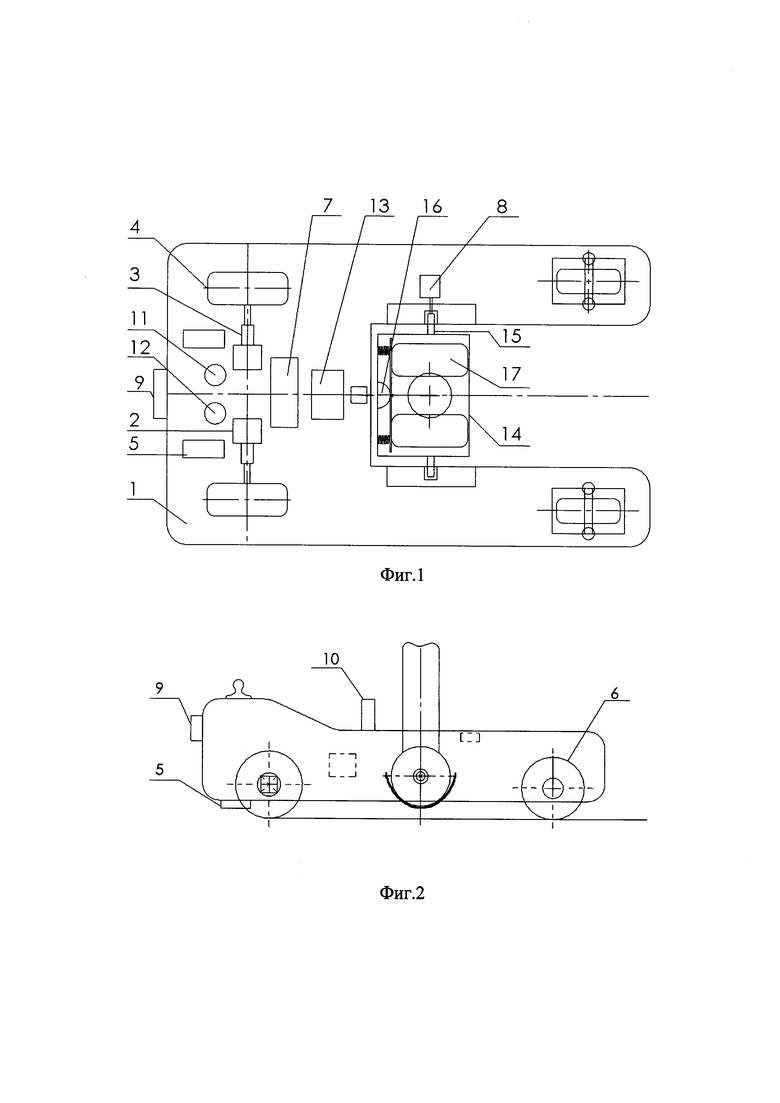
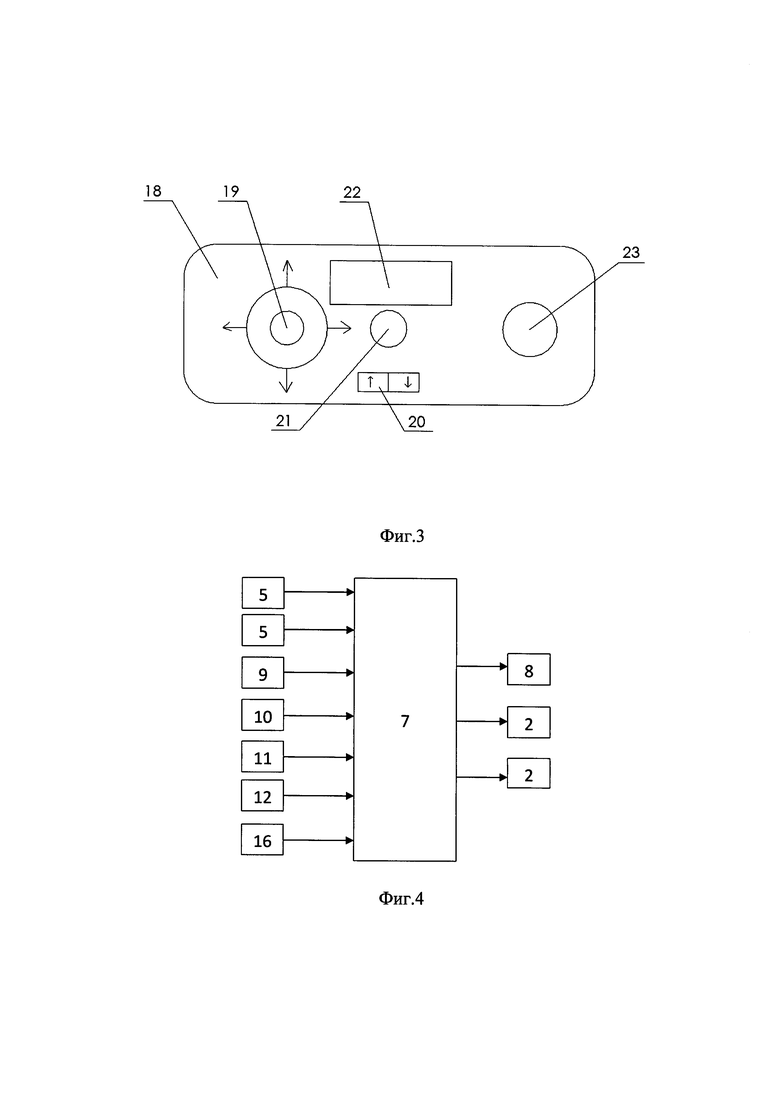
Заявляемое устройство изображено: на фиг. 1 и фиг. 2 - изображен вид сверху и вид сбоку малогабаритного буксировщика воздушных судов с автоматическим управлением; на фиг. 3 - изображен пульт дистанционного управления малогабаритным буксировщиком; на фиг. 4 - изображена блок-схема устройства, отображающая взаимодействие между принимающими и исполнительными элементами буксировщика.
На Фиг. 1 и фиг. 2 изображен вид сверху и вид сбоку малогабаритного буксировщика воздушных судов с автоматическим управлением, включающий следующие элементы: несущую раму 1, симметрично расположенные относительно продольной оси буксировщика электродвигатели 2, редукторы 3, ведущие колеса 4, датчики приема сигнала от указателя маршрута 5 (например фоторезисторы), самонаправляющиеся колеса 6, блок управления 7, сервопривод поворота ковша 8, датчик контроля габаритного пространства в направлении движения 9, датчик определения расстояния до передней стойки воздушного судна при стыковке 10, приемник сигнала дистанционного ручного управления 11, спутниковый датчик слежения 12, источник питания 13, механизм подъема и фиксации колес передней стойки воздушного судна 14, поворотную ось 15, датчик контроля нахождения колес передней стойки воздушного судна в механизме подъема и фиксации 16, колеса передней стойки воздушного судна 17,
На фиг. 3 изображен пульт дистанционного управления 18, включающий следующие элементы: джойстик ускорения и изменения направления движения 19, тумблер подъема и опускания ковша 20, тумблер включения и отключения питания буксировщика 21, дисплей 22, тумблер переключения режимов управления 23.
На фиг. 4 изображена блок-схема устройства, включающая следующие элементы: датчики приема сигнала от указателя маршрута 5, датчик контроля габаритного пространства в направлении движения 9, датчик определения расстояния до передней стойки воздушного судна при стыковке 10, приемник сигнала дистанционного ручного управления 11, спутниковый датчик слежения 12, датчик контроля нахождения колес передней стойки воздушного судна в механизме подъема и фиксации 16, блок управления 7 электродвигатели 2, сервопривод поворота ковша 8.
Устройство работает следующим образом. Оператор при помощи пульта управления 18, включает питание буксировщика с помощью тумблера 21, затем с помощью джойстика 19 выставляет буксировщик таким образом, чтобы механизм подъема и фиксации колес передней стойки воздушного судна 14 и колеса передней стойки 17 воздушного судна оказались на одной линии по направлению движения, убедившись в правильном расположении буксировщика и воздушного судна, оператор включает тумблер 23, который переводит буксировщик с ручного управления на автоматическое, далее воздействуя на джойстик 19 задает режим движения задним ходом, при этом датчик определения расстояния до передней стойки воздушного судна при стыковке 10 подает сигнал через блок управления 7 на электродвигатели 2 с целью снижения скорости движения по мере приближения к передней стойки и ее центрирования по отношению к механизму подъема и фиксации. Подъезд к воздушному судну происходит с заранее опущенным ковшом до того момента пока датчик контроля нахождение колес передней стойке воздушного судна в механизме подъема и фиксации 16 не подаст сигнал через блок управления 7 на остановку буксировщика. Далее блок управления 7 подает сигнал на сервопривод поворота ковша 8. После того как переднее колесо 17 будет зафиксировано в ковше, оператор тумблером 23 переводит буксировщик в ручное управление и выводит на стартовую позицию таким образом, чтобы нанесенная на поверхность аэродромного покрытия линия разметки оказалась между датчиками приема сигнала от указателя маршрута 5. Далее при помощи тумблера 23 и джойстика 19 буксировщик переводится в автоматический режим движения и отправляется по размеченному маршруту к взлетно-посадочной полосе. При этом в процессе движения маршрутная линия разметки должна оставаться между датчиками приема сигнала от указателя маршрута 5. В случае пересечения одним из датчиков маршрутной линии разметки сигнал с датчика 5 об отклонении от маршрута поступает в блок управления 7, после чего происходит корректировка направления движения, за счет замедления или ускорения вращения одного из ведущих колес. В случае если на пути движения буксировщика окажется препятствие, датчик контроля габаритного пространства в направлении движения 9, подаст сигнал на блок управления 7, который остановит движение буксировщика и не позволит совершить наезд на объект, создающий помеху для дальнейшего движения. Окончанием маршрута может являться нанесенная на аэродромное покрытие поперечная разметка, при пересечении которой одновременно двумя датчиками 5 происходит остановка буксировщика. Информация об остановке будет отображаться на дисплее 22. Далее принимающий оператор переводит буксировщик в ручное управление тумблером 23 и с помощью тумблера 20 опускает ковш и отводит буксировщик от воздушного судна. Движение на стоянку осуществляется аналогичным образом, как и при движении на взлетно-посадочную полосу.
Пульт управления 18 с размещенными на нем элементами, имеющими определенные положения управляющего воздействия на буксировщик, позволяет формировать команды управления, которые посредством сгенерированных сигналов передаются на приемник 11 буксировщика, где производится расшифровка полученных сигналов и дальнейшая их передача на блок управления 7 способный с использованием программного обеспечения обрабатывать полученные сигналы и реализовать управление исполнительными элементами 2 и 8, а также с помощью дисплея 22 оператор может контролировать движение буксировщика по маршруту с помощью спутникового датчика слежения 12. В случае если движение будет прекращено из-за возникшего на его пути препятствия или по другим причинам, на дисплее оператор может увидеть сложившуюся ситуацию и проследовать к месту остановки буксировщика. После того как препятствие будет устранено датчик 9 подаст сигнал через блок управления 7 на электродвигатели 2 на продолжение движения. Также в случае разряда источника питания 13, на дисплее будет отражаться индикатор степени разряда батареи предупреждающий оператора о том, что вскоре буксировщик прекратит свое движение, [см. например, Гюнтер, М. Электронное дистанционное управление моделями / М. Гюнтер. - М.: ДОСААФ, 1980. - 418 с].
Изготовление малогабаритного буксировщика беспилотных летательных аппаратов самолетного типа с автоматическим управлением возможно из узлов и агрегатов, серийно выпускаемых промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный буксировщик воздушных судов с дистанционным управлением | 2015 |
|
RU2645175C2 |
| Способ буксировки самолетов с использованием малогабаритного буксировщика с дистанционным управлением | 2016 |
|
RU2618611C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ВОЗДУШНЫХ СУДОВ | 2016 |
|
RU2654240C2 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| УСТРОЙСТВО ДЛЯ НАЗЕМНОЙ БУКСИРОВКИ И ЭВАКУАЦИИ САМОЛЕТОВ | 2007 |
|
RU2340515C1 |
| МАЛОГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ БУКСИРОВАНИЯ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2483988C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО ВОЗДУШНЫХ СУДОВ | 2002 |
|
RU2307771C2 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МАСШТАБНЫХ МОДЕЛЕЙ НАДВОДНЫХ СУДОВ НА ОТКРЫТОМ ВОДОЕМЕ | 2015 |
|
RU2579239C1 |
Изобретение относится к наземному обслуживанию воздушных судов, в том числе и беспилотных летательных аппаратов самолетного типа. Малогабаритный буксировщик воздушных судов содержит датчики приема сигнала от указателя маршрута (5), датчик контроля габаритного пространства в направлении движения (9), датчик определения расстояния до передней стойки воздушного судна (10), датчик спутникового слежения (12). Механизм подъема и фиксации колес передней стойки воздушного судна (14) выполнен в виде спрофилированного ковша с возможностью поворота вокруг своей оси посредством сервопривода ковша (8). На передней стенке упомянутого ковша расположен датчик контроля нахождения колес передней стойки воздушного судна (16) в механизме подъема и фиксации колес передней стойки. Передние ведущие колеса буксировщика имеют индивидуальный привод от электродвигателей через редуктор с возможностью подачи сигнала датчиками на блок управления, управляющий работой электродвигателей привода колес и сервопривода механизма подъема и фиксации колес передней стойки воздушного судна. Достигается повышение надежности, безопасности и упрощение конструкции. 4 ил.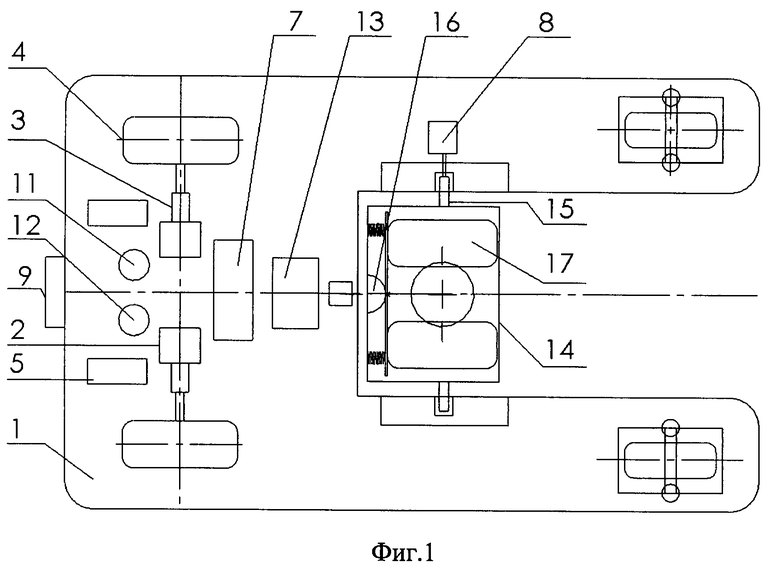
Малогабаритный буксировщик воздушных судов, содержащий несущую раму, блок управления, пульт дистанционного управления, приемник сигнала дистанционного ручного управления, отличающийся тем, что дополнительно оборудован датчиками приема сигнала от указателя маршрута, расположенными в передней нижней части буксировщика симметрично его продольной оси движения, датчиком контроля габаритного пространства в направлении движения, расположенным в передней части буксировщика, датчиком определения расстояния до передней стойки воздушного судна, расположенным по продольной оси буксировщика перед механизмом подъема и фиксации колес передней стойки воздушного судна, датчиком контроля нахождения колес передней стойки воздушного судна в механизме подъема и фиксации, расположенным на передней стенке ковша, датчиком спутникового слежения, механизмом подъема и фиксации колес передней стойки воздушного судна, выполненным в виде спрофилированного ковша с возможностью поворота вокруг своей оси посредством сервопривода ковша, а передние ведущие колеса буксировщика имеют индивидуальный привод от электродвигателей через редуктор, при этом датчики подают сигнал на блок управления, управляющий работой электродвигателей привода колес и сервопривода механизма подъема и фиксации колес передней стойки воздушного судна.
| Малогабаритный буксировщик воздушных судов с дистанционным управлением | 2015 |
|
RU2645175C2 |
| МАЛОГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ БУКСИРОВАНИЯ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2483988C1 |
| US 2012215393 A1, 23.08.2012 | |||
| WO 2013042114 A1, 28.03.2013. | |||

