Изобретение относится к исследовательским малоразмерным бинарным космическим аппаратам (БКА), весом менее 1000 грамм, предназначенным для поиска и сбора в космическом пространстве наноразмерных объектов внеземного происхождения, скопления которых расположены в окрестностях точек либрации (точек Лагранжа) в виде пылевых облакоподобных структур (например, пылевые облака Кордылевского в системе Луна-Земля). Цель исследований - на основании изучения собранных БКА материалов внеземного происхождения, их физико-химического анализа и классификации, осуществление последующего синтеза подобных наночастиц с известными или новыми свойствами, не встречающимися на Земле.
Используемое в описании полезной модели словосочетание «бинарный космический аппарат» (БКА) понимается как космический аппарат, состоящий из двух корпусов и одной общей армированной гибкой ленточной солнечной батарей, расположенной между ними, разворачиваемой за счет разматывания солнечной батареи, смотанной в рулон, при реверсивном перемещении одного корпуса относительно другого в противоположные стороны и обратно, осуществляемом с помощью мультивекторных матричных ракетных двигателей (ММРД). Гибкая ленточная солнечная батарея (СБ) - это гибкая диэлектрическая ленточная подложка, на которую нанесен массив соединенных между собой тонкопленочных солнечных фотоэлементов в сочетании с микроконтейнерами для сбора нанообъектов. Точки либрации - это точки, где гравитационное и центробежное ускорения, воздействующие на помещенное в окрестностях точки тело, уравновешиваются, в связи с чем так называемые «малые тела» могут там накапливаться [1]. Квантовые точки - синтезированные наночастицы, преобразующие ультрафиолетовое электромагнитное излучение за счет механизма стоксового сдвига в видимое или инфракрасное излучение, интенсивность излучения и длина волны которых зависит от материала ядра и его диаметра, материала окружающего его оболочки или множества оболочек [2]. Нанообъекты - отдельные наночастицы размером в интервале 2 - 100 нанометров и системы наночастиц, образующие однородные или неоднородные многозвенные конструкции, размеры которых меньше 2000 нанометров.
Известен микро-спутник с солнечной батареей, выполненной в виде гибкой подложки с нанесенными тонкопленочными солнечными фотоэлементами, намотанной при выведении вокруг корпуса микро-спутника и развертываемой с помощью пружин после выхода на заданную орбиту. Микро-спутник содержит: корпус спутника, механизм развертывания на базе торсионных пружин, солнечные батареи, выполненные из гибкой подложки с нанесенными тонкопленочными фотоэлементами, двигатели, антенны, солнечный датчик, конусный узел стыковки с другим спутником [3].
Недостатком устройства является отсутствие возможности упорядоченного активного сбора частиц в наноразмерном диапазоне с помощью электрического поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Наиболее близким по технической сущности является бинарный космический аппарат с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями, содержащий два кубических корпуса с закрепленной между ними гибкой подложкой с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон с нанесенными информационно-силовыми шинами и коллинеарной антенной, позиционной штрих-кодовой лентой, два датчика штрих-кода, два мультивекторных матричных ракетных двигателя, две выдвижные телескопические штанги, два линейных шаговых двигателя, две катушки, два дисковых токосъемника, два реверсивных шаговых двигателя, два лазерных дальномера, две ПЗС-матрицы, два солнечных датчика, два контроллера, два стабилизатора напряжения, два приемопередатчика, два электромагнита, две стыковочные площадки [4].
Недостатком устройства является отсутствие возможности упорядоченного активного сбора частиц в наноразмерном диапазоне с помощью электрического поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации, планет входящих в Солнечную систему.
Отличие предлагаемого технического решения от выше изложенных заключается в ведении армированной гибкой диэлектрической ленточной подложки, на поверхности которой сформирован массив геометрически упорядоченных замкнутых выступов высотой в несколько микрон, прямоугольной формы, что позволило сформировать стенки микроконтейнаров, пригодные для запайки и не мешающие свертыванию в рулон гибкой подложки, и обеспечивающие при транспортировке на Землю дополнительную защиту собранных нанообъектов, помещенных в планарные микроконтейнеры в виде многослойного рулонного кокона.
Введение пленочных электродов, соединенных с высоковольтными шинами расположенных на дне микроконтейнеров, позволило сформировать массив притягивающих электрических полей для сбора и накопления исследуемых нанообъектов.
Введение жестких диэлектрических микроподложек, лежащих на пленочных электродах, подключенных к высоковольтному напряжению, позволило производить осаждение исследуемых нанообъектов непосредственно в космосе на поверхность жесткой диэлектрической микроподложки без внесения посторонних наноразмерных земных артефактов. Последовательное расположение в два ряда на гибкой диэлектрической ленточной подложке загерметизированных жестких диэлектрических микроподложек, заранее адаптированных по размерам под заданный тип микроскопов, позволило осуществить автоматическое конвейерное исследование методами зондовой и электронной микроскопии доставленный наноматериал.
Введение источника высоковольтного напряжения позволило создать электрическое поле, притягивающее положительно и отрицательно заряженные нанообъекты.
Введение катушки с размещенной на ней герметизирующей пленкой, совместимой с материалам верхних краев завариваемых микроконтейнеров, и введение термоэлемента для заварки микроконтейнеров с собранными нанообъетами, позволило производить герметизацию одновременно с намоткой гибкой диэлектрической ленточной подложки в конвейерном режиме.
Использование позиционной штрих-кодовой ленты, несущей жестко закрепленный идентификационный номер микроконтейнера совместно с датчиком штрих-кода, считывающим при сканировании этот код в момент времени заварки соответствующего микроконтейнера, позволило по сочетанию кода с «привязанным» временным интервалом восстанавливать координаты нахождения БКА от начальной точки сканирования при заборе каждого внеземного нанообъекта, вошедшего в допусковую зону поисковых параметров.
Техническим результатом является возможность упорядоченного активного сбора частиц в наноразмерном диапазоне с помощью электрического поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Технический результат предложенного изобретения достигается совокупностью существенных признаков, а именно: бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации содержащий два корпуса с закрепленной между ними гибкой подложкой с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационно-силовыми шинами и коллинеарной антенной, позиционной штрих-кодовой лентой, два мультивекторных матричных ракетных двигателя, две выдвижные телескопические штанги, два линейных шаговых двигателя, два реверсивных шаговых двигателя, две катушки для размещения гибкой диэлектрической ленточной подложки, два лазерных дальномера, две ПЗС-матрицы, два солнечных датчика, датчик штрих-кода, два дисковых токосъемника, два контроллера, два стабилизатора напряжения, приемопередатчик, первый и второй панелеобразные корпуса, соединенные с первым и вторым контейнерами, высоковольтный источник напряжения, катушку для размещения герметизирующей пленки, третий реверсивный шаговый двигатель, герметизирующею пленку, термоэлемент для заварки герметизирующей пленкой микроконтейнеров, расположенных на гибкой диэлектрической ленточной подложке, высоковольтные шины, пленочные электроды, жесткие диэлектрические микроподложки с шириной меньше радиуса первой катушки для размещения гибкой диэлектрической ленточной подложки и длиной не более половины ее высоты, причем на гибкую диэлектрическую ленточную подложку, выполненную армированной, параллельно ее краям нанесены две высоковольтные шины, соединенные с пленочными электродами на которые наложены жесткие диэлектрические микроподложки, по периметру которых сформированы армирующие равновысотные стенки из материала совместимым с герметизирующей пленкой, высота которых превышает максимальные размеры собираемых нанообъектов и которые в зависимости от их полярности распределяются по образующим массив прямоугольным микроконтейнерам, которые упорядочено расположены в два ряда по длине гибкой диэлектрической ленточной подложки между солнечными батареями, под каждой парой микроконтейнером нанесен их идентификационный штрих-код, над которым пленочные электроды по парно подключены через высоковольтные шины и первый дисковый токосъемник к положительному и отрицательному выходам источника высоковольтного напряжения соединенного с первым стабилизатором напряжения, датчик штрих-кода соединен с информационным входом второго контроллера, управляющий выход которого соединен с входом термоэлемента для заварки, герметизирующей пленкой микроконтейнеров, другие управляющие выходы соединены с входом третьего реверсивного шагового двигателя механически соединенного с осью катушки для размещения герметизирующей пленки, с размещенной на ней герметизирующей пленкой.
Сущность изобретения поясняется на Фиг. 1, где представлен бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации в момент развертывания гибкой ленточной СБ. На Фиг. 2 представлена структурная блок-схема бинарного космического аппарата для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации. На Фиг. 3 представлен выносной элемент А (10:1) в увеличенном масштабе поясняющий топологию расположения на гибкой диэлектрической ленточной подложки тонкопленочных солнечных фотоэлементов относительно расположению микроконтейнеров для сбора и последующей герметизации собранных нанообъектов. На Фиг. 4 - Фиг. 6 - схематично поясняются этапы развертывания БКА. На Фиг. 7 этап сканирования окрестности точки либрации, сбор и герметизация собранных нанообъектов. На Фиг. 8, Фиг. 9 - этапы свертывание БКА.
Бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации содержит: (Фиг. 1, Фиг. 2) первый 1 и второй 2 панелеобразные корпуса, первый 3 и второй 4 контейнеры, первый 5 и второй 6 линейные шаговые двигатели, первую 7 и вторую 8 выдвижные телескопические штанги, первый 9 и второй 10 мультивекторные матричные ракетные двигатели (ММРД), первый 11 и второй 12 лазерные дальномеры, первую 13 и вторую 14 ПЗС-матрицы, первый 15 и второй 16, третий 17 реверсивные шаговые двигатели, первую 18 и вторую 19 катушки для размещения гибкой диэлектрической ленточной подложки, катушку для размещения герметизирующей пленки 20, герметизирующую пленку 21, термоэлемент для заварки микроконтейнеров с собранными нанообъектами 22, гибкую диэлектрическую ленточную подложку 23, тонкопленочные солнечные фотоэлементы 24, силовые шины 25, информационную шину 26, высоковольтную шину с положительной полярностью 27, высоковольтную шину с отрицательной полярностью 28, пленочные электроды 29, жесткие диэлектрические микроподложки 30, микроконтейнеры 31, позиционную штрих-кодовую ленту 32, датчик штрих-кода 33, первый 34 и второй 35 солнечные датчики, первый 36 и второй 37 контроллеры, первый 38 и второй 39 дисковые токосъемники, первый 40 и второй 41 стабилизаторы напряжения, высоковольтный источник питания 42, коллинеарную антенну 43, приемопередатчик 44. На Фиг. 2 в границах замкнутых пунктирных линий расположены элементы, конструктивно размещенные в первом 1 и втором 2 панелеобразных корпусах и в первой 3, и второй 4 прямоугольных контейнерах. λ1 и λ2 - выделенные длинны волн электромагнитного излучения оптического диапазона первого и второго лазерных дальномеров.
Гибкая диэлектрическая ленточная подложка 23 (Фиг. 3) армирована диэлектрическими замкнутыми упорядоченными прямоугольными ребрами жесткости в виде бортиков, образующих на поверхности гибкой диэлектрической ленточной подложки 23 множество прямоугольных, открытых сверху планарных микроконтейнеров 31. В каждом микроконтейнере 31 размещен пленочный электрод 29, на который наложена жесткая диэлектрическая микроподложка 30. Жесткие диэлектрические микроподложки 30 выполнены шириной меньше радиуса первой 18 катушки для размещения гибкой диэлектрической ленточной подложки, для уменьшения асимметрии формы рулона при проведении многослойной намотки. Для выполнения размещения жестких диэлектрических подложек 30 в два ряда на гибкой диэлектрической ленточной подложке 23 их длина не должна превышать половины ее высоты. В зависимости от расположения пленочных электродов 29 в верхней или нижней части гибкой диэлектрической ленточной подложки 23 они соединены с высоковольтными шинами 27 и 28 с положительной и отрицательной полярностью. При включении высоковольтного источника питания 42 создается электрическое поле, которое притягивает к пленочным электродам 29 противоположно заряженные наночастицы, которые осаждаются, не достигнув их на жестких диэлектрических микроподложках 30. Микроконтейнеры 31 разделены на два класса - с отрицательно и положительно заряженным электродом, для исключения попадания на жесткие диэлектрические подложки 30 разно заряженных наночастиц и предотвращения их слипания (коагуляции). Для исключения попадания земных наночастиц, планарные микроконтейнеры 31 сверху завариваются герметизирующей пленкой 21 в космосе и послойно, вместе с гибкой диэлектрической ленточной подложкой 23, на которой они нанесены, наматываются на вторую 19 катушку для размещения гибкой диэлектрической ленточной подложки. Идентификационный штрих-код, нанесенный на позиционную лену 32 под каждым рядам планарных микроконтейнеров 31, позволяет определить время его заклейки и по нему определить координаты интервалов траекторий, в которых были собраны интересующие наноразмерные объекты. Это позволяет собрать нанообъеты, например, в зонах либрации L4 и L5 в системе Земля-Луна для топологического анализа распределения нанообъектов в облокоподобных пылевых структурах при их линейном или спиралевидном сканировании.
Для осуществления изобретения могут быть использованы, например, известные технологии изготовления компонентов. В качестве ММРД может быть использована мультивекторная матричная ракетная двигательная система с цифровым управлением величины и направления тяги, которая состоит из матриц реверсивных многоразрядных двоичных двигательных ячеек с твердым топливом и перпендикулярно размещенных им радиальных многоразрядных двоичных двигательных ячеек с твердым топливом, расположенных по кольцу вокруг реверсивных ячеек, обеспечивающих генерацию множества разнонаправленных векторов тяги с прецизионным цифровым управлением в двоичном коде величиной тяги каждой ячейки [5].
При изготовлении СБ могут быть использованы известные технологии изготовления гибких солнечных тонкопленочных батарей, выполненных на базе гибкой подложки с нанесенными тонкопленочными фотогальваническими элементами, изготовленными, по меньшей мере, из аморфного кремния (a-Si), теллурида кадмия (CdTe), арсенида галлия (GaAs) [3].
Устройство работает следующим образом: после доставки в точку либрации БКА включаются первый 5 и второй 6 линейные шаговые двигатели, осуществляющие выдвижение телескопических штанг 7 и 8, отводящие первый 9 и второй 10 мультивекторные матричные ракетные двигатели от первого 1 и второго 2 панелеобразных корпусов. Одновременно включаются первый 11 и второй 12 лазерные дальномеры, работающие на выделенных длинах волн λ2 и λ1, оптические оси которых направлены на центры первой 13 и второй 14 ПЗС-матриц, реагирующих только на выделенные длины волн электромагнитного излучения λ1 и λ2 оптического диапазона для исключения влияния помех от активных или пассивных источников. После проверки работоспособности первого 11 и второго 12 лазерных дальномеров и первой 13 и второй 14 ПЗС-матриц включаются первый 9 и второй 10 ММРД, одновременно включается первый 15 реверсивный шаговый двигатель, механически соединенный с осью первой 18 катушки для размещения гибкой диэлектрической ленточной подложки, при вращении которой начинается сброс с первой 18 катушки размещенной на ней гибкой диэлектрической ленточной подложкой 23 с нанесенными на нее тонкопленочными солнечными фотоэлементами 24 и микроконтейнерами 31 синхронно с отдалением второго 2 панелеобразного корпуса относительно первого 1 панелеобразного корпуса. При развертывании гибкой диэлектрической ленточной подложки 23 первый 9 и второй 10 ММРД разматывают полотно СБ, равномерно разлетаясь в разные стороны, при этом, с помощью первого 15 реверсивного шагового двигателя имеется возможность, за счет подмотки полотна, осуществить подтягивание первого 1 панелеобразного корпуса БКА ко второму 2 панелеобразному корпусу БКА. После развертывания на требуемую длину гибкой диэлектрической ленточной подложки 23 с тонкопленочными солнечными фотоэлементами 24 система переходит в режим ориентации и слежения за Солнцем. Поворот плоскости гибкой диэлектрической ленточной подложки 23 в направлении Солнца и одновременное оптимальное натяжение ее осуществляется с помощью первого 9 и второго 10 ММРД, осуществляющих сближение или удаление первого 1 и второго 2 панелеобразных корпусов относительно друг друга, перемещаясь параллельно оптическим осям первого 11 и второго 12 лазерных дальномеров и одновременно осуществляя угловые повороты синхронно первого 1 панелеобразного корпуса и второго 2 панелеобразного корпуса, согласно коду координат Солнца, полученных от первого 34 и второго 35 солнечных датчиков. На гибкой диэлектрической ленточной подложке 23 кроме тонкопленочных солнечных фотоэлементов 24 и соединяющих их силовых шин 25, информационной шины 26 для обмена информацией между первым 36 и вторым 37 контроллерами, также по краю нанесена коллинеарная антенна 43. Для втягивания пылеобразных структур, состоящих из нанообъектов, размещены высоковольтные шины 27 и 28, соединенные с пленочными электродами 29, расположенными под жесткими диэлектрическими микроподложками 30, на которых осаждаются противоположно заряженные нанообъекты накапливаемые на дне каждого микроконтейнера 31. Первый 38 и второй 39 дисковые токосъемники обеспечивают устойчивые электрические контакты со всеми элементами, расположенными на гибкой диэлектрической ленточной подложке 23 во время вращения первой 18 или второй 19 катушек в процессе разматывания и растягивания гибкой диэлектрической ленточной подложки 23 при ее развертывании и ориентации на Солнце. Электрический ток, выработанный тонкопленочными солнечными фотоэлементами 24 с контактов первого 38 и второго 39 токосъемников, поступает на входы первого 40 и второго 41 стабилизаторов напряжения, которые выдают стабилизированные напряжения для питания высоковольтного источника питания 42 и приемопередатчика 44, для зарядки аккумуляторов первого 36 и второго 37 контроллеров и обеспечения электропитанием всех датчиков и двигателей. Через высоковольтную секцию первого дискового токосъемника 38 высоковольтное напряжение с источника высоковольтного питания 42 подается на высоковольтные шины с положительной 27 и отрицательной 28 полярностью расположенные на гибкой подложке 23, для создания притягивающих электрических полей на дне каждого микроконтейнера 31. По мере сканирования облачных структур происходит последовательная герметизация микроконтейнеров 31 за счет сматывания герметизирующей пленки 21 с катушки 20 для размещения герметизирующей пленки при помощи третьего 17 реверсивного шагового двигателя и сваривания герметизирующей пленки 21 с выступающими частями, расположенными на гибкой диэлектрической ленточной подложке 23 с помощью термоэлемента для заварки микроконтейнеров с собранными нанообъектами 22. Одновременно осуществляется подмотка участка с запаянными микроконтейнерами 31 на катушку 19 для размещения гибкой диэлектрической ленточной подложки и фиксация времени герметизации микроконтейнера 31 с идентификационным номером, указанным на позиционной штрих-кодовой ленте 32 под каждой парой микроконтейнеров 31 для конвейерного автоматического распознавания при анализе доставленных проб с помощью зондовой, электронной и флуоресцентной микроскопии. Например, обнаружение космических нанообъектов со свойствами квантовых точек с излучательной или безызлучательной передачей энергии возможно осуществить также по анализу их электрических характеристик [6].
На Фиг. 4 - Фиг. 6 - схематично поясняются этапы развертывания БКА. На Фиг. 7 этап сканирования окрестности точки либрации сбор и герметизация собранных нанообъектов. На Фиг. 8, Фиг. 9 - этапы свертывание БКА.
Фиг. 4 первый этап - тестирование дальномеров и электронного оборудования. Фиг. 5 второй этап - выдвижение двигателей и ориентация положения БКА на Солнце. Фиг. 6 третий этап - развертывание гибкой подложки с размещенными фотоэлементами и микроконтейнерами для забора внеземных нанообъектов. Фиг. 7 четвертый этап - перемещение БКА по окрестности точки либрации в зависимости от типа сканирования по прямой или по спирали с постоянной скоростью. Сбор нанообъектов за счет притяжения их к поверхностям жестких диэлектрических микроподложек, расположенных в открытых микроконтейнерах, и последующая герметизация открытых частей микроконтейнеров с собранным наноматериалом запайкой герметизирующей пленкой. Схематически многослойное сканируемое пылеобразное облако изображено на заднем плане. Фиг. 8 пятый этап - полное свертывание гибкой подложки в рулон и переход системы в энергоэкономичный «дежурный режим». Фиг. 9 шестой этап - переход в «спящий режим», ожидание транспортного космического аппарата для перемещения собранных нанообъектов в исследовательскую лабораторию электронной и зондовой микроскопии, расположенной на Земле или на орбитальной станции в космосе.
Предложенная конструкция бинарного космического аппарата для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации позволяет: развернуть и свернуть поисковое гибкое ленточное полотно большой площади между двумя растягивающими ее маневровыми ММРД, соединенными с двумя контейнерами (в виде «космического невода нанообъектов»). Осуществить сочетание сканирования по поисковой траектории исследуемой пылеоблачной структуры, с одновременным активным сбором нанообъектов, попавшим в зону притяжения электрического поля. Выполнить смешанное упорядоченное размещение кодированных микроконтейнеров и солнечных элементов на большой площади гибкого ленточного полотна, позволяющее вырабатывать достаточное количество электрической энергии для непрерывного втягивания в микроконтейнеры дрейфующих нанообъектов при сканировании окрестностей точек либрации в Солнечной системе. Реализовать конвейерную герметизацию собранных на жесткие микроподложки нанообъектов, размещеных в микоконтейнерах, в сочетании со свертыванием в компактный, транспортируемый рулон гибкого ленточного полотна, что ранее невозможно было осуществить с помощью известных конструкций малоразмерных космических аппаратов.
Источники информации
1. Патент на изобретение RU 2691686 С1, 17.06.2019, G01N 1/02, B64G 4/00, Способ забора и доставки на Землю проб космической пыли из окрестностей точек либрации системы Земля-Луна и комплекс средств для его реализации / Цыганков О.С.
2. Патент на изобретение RU 2723899 С1, 18.06.2020, G01Q 60/24, B82Y 35/00, сканирующий зонд атомно-силового микроскопа с отделяемым ТЕЛЕУПРАВЛЯЕМЫМ НАНОКОМПОЗИТНЫМ ИЗЛУЧАЮЩИМ ЭЛЕМЕНТОМ, ЛЕГИРОВАННЫМ КВАНТОВЫМИ ТОЧКАМИ, АПКОНВЕРТИРУЮЩИМИ И МАГНИТНЫМИ НАНОЧАСТИЦАМИ структуры ядро-оболочка / Линьков В.А., Гусев С.И., Вишняков Н.В., Линьков Ю.В., Линьков П.В.
3 Patent US 9758260 B2, Sep. 12, 2017, B64G 1/22, B64G 1/10, LOW VOLUME MICRO SATELLITE WITH ELEXIBLE WINDED PANELS EXPANDABLE AFTER LAUNCH.
4. Патент на изобретение RU 2716728 C1, 16.03.2020, B64G 1/22, БИНАРНЫЙ МАЛОРАЗМЕРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ АНТЕННОЙ, СОВМЕЩЕННОЙ С ГИБКОЙ ЛЕНТОЧНОЙ СОЛНЕЧНОЙ БАТАРЕЕЙ, / Линьков В.А., Гусев С.И., Колесников С.В., Линьков Ю.В., Линьков П.В., Таганов А.И.
5. Патент на изобретение RU 2707474 С1, 26.11.2019, F02K 9/95, B64G 1/40, МУЛЬТИВЕКТОРНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ И НАПРАВЛЕНИЕМ ТЯГИ ДВИГАТЕЛЬНЫХ ЯЧЕЕК ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ / ЛИНЬКОВ В.А., Гусев С.И., Колесников С.В., Линьков Ю.В., Линьков П.В., Таганов А.И.
6. Патент на изобретение RU 2493631 С1, 20.09.2013, H01L 21/66, В82В 3/00, СПОСОБ ОБНАРУЖЕНИЯ КВАНТОВЫХ ТОЧЕК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ / Линьков В.А., Вихров С.П., Вишняков Н.В., Литвинов В.Г.




Изобретение относится к малоразмерным исследовательским бинарным космическим аппаратам (БКА), предназначенным для поиска и сбора наноразмерных объектов внеземного происхождения, скопившихся в космических пылевых структурах, расположенных в окрестностях точек либрации (точек Лагранжа). БКА содержит первый и второй контейнеры, два панелеобразных корпуса, в центрах торцов которых размещены телескопические штанги, на которых размещены два мультивекторных матричных ракетных двигателя (ММРД) для сканирования пылевых структур, развертывания и свертывания гибкой солнечной батареи (СБ), интегрированной с планарными микроконтейнерами для хранения нанообъектов, собранных на поверхностях жестких микроподложек с помощью электрического поля. Герметизация собранных нанообъектов осуществляется запайкой планарных микроконтейнеров герметизирующей пленкой с одновременным свертыванием в рулон СБ, транспортируемый на Землю для исследований с помощью флуоресцентных и электронных микроскопов. Техническим результатом является возможность упорядоченного, активного сбора частиц в наноразмерном диапазоне с помощью электрического поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему. 9 ил.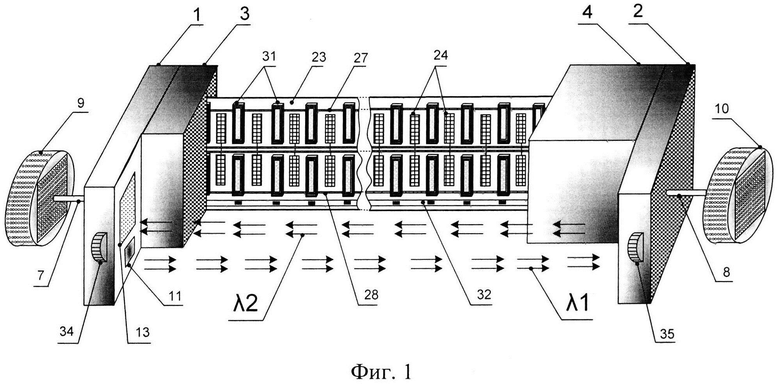
Бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации, содержащий два корпуса с закрепленной между ними гибкой подложкой с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационно-силовыми шинами и коллинеарной антенной, позиционной штрихкодовой лентой, два мультивекторных матричных ракетных двигателя, две выдвижные телескопические штанги, два линейных шаговых двигателя, два реверсивных шаговых двигателя, две катушки для размещения гибкой диэлектрической ленточной подложки, два лазерных дальномера, две ПЗС-матрицы, два солнечных датчика, датчик штрихкода, два дисковых токосъемника, два контроллера, два стабилизатора напряжения, приемопередатчик, отличающийся тем, что содержит первый и второй панелеобразные корпуса, соединенные с первым и вторым контейнерами, высоковольтный источник напряжения, катушку для размещения герметизирующей пленки, третий реверсивный шаговый двигатель, герметизирующею пленку, термоэлемент для заварки герметизирующей пленкой микроконтейнеров, расположенных на гибкой диэлектрической ленточной подложке, высоковольтные шины, пленочные электроды, жесткие диэлектрические микроподложки с шириной меньше радиуса первой катушки для размещения гибкой диэлектрической ленточной подложки и длиной не более половины ее высоты, причем на гибкую диэлектрическую ленточную подложку, выполненную армированной, параллельно ее краям нанесены две высоковольтные шины, соединенные с пленочными электродами, на которые наложены жесткие диэлектрические микроподложки, по периметру которых сформированы армирующие равновысотные стенки из материала, совместимого с герметизирующей пленкой, высота которых превышает максимальные размеры собираемых нанообъектов и которые в зависимости от их полярности распределяются по образующим массив прямоугольным микроконтейнерам, которые упорядоченно расположены в два ряда по длине гибкой диэлектрической ленточной подложки между солнечными батареями, под каждой парой микроконтейнеров нанесен их идентификационный штрихкод, над которым пленочные электроды попарно подключены через высоковольтные шины и первый дисковый токосъемник к положительному и отрицательному выходам источника высоковольтного напряжения, соединенного с первым стабилизатором напряжения, датчик штрихкода соединен с информационным входом второго контроллера, управляющий выход которого соединен с входом термоэлемента для заварки герметизирующей пленкой микроконтейнеров, другие управляющие выходы соединены с входом третьего реверсивного шагового двигателя, механически соединенного с осью катушки для размещения герметизирующей пленки, с размещенной на ней герметизирующей пленкой.
| Способ забора и доставки на Землю проб космической пыли из окрестностей точек либрации системы Земля-Луна и комплекс средств для его реализации | 2018 |
|
RU2691686C1 |
| US 9758260 B2, 12.09.2017 | |||
| СКАНИРУЮЩИЙ ЗОНД АТОМНО-СИЛОВОГО МИКРОСКОПА С ОТДЕЛЯЕМЫМ ТЕЛЕУПРАВЛЯЕМЫМ НАНОКОМПОЗИТНЫМ ИЗЛУЧАЮЩИМ ЭЛЕМЕНТОМ, ЛЕГИРОВАННЫМ КВАНТОВЫМИ ТОЧКАМИ, АПКОНВЕРТИРУЮЩИМИ И МАГНИТНЫМИ НАНОЧАСТИЦАМИ СТРУКТУРЫ ЯДРО-ОБОЛОЧКА | 2019 |
|
RU2723899C1 |
| ИНДУКЦИОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ НАСОС для жидкого МЕТАЛЛА | 0 |
|
SU190778A1 |

