Изобретение относится к области газотурбинного двигателестроения, в частности к системам автоматического управления реверсивным устройством авиационного газотурбинного двигателя (ГТД) с применением электронной цифровой системы автоматического управления двигателя.
В соответствии с общемировой тенденцией создания полностью электрических самолетов в настоящее время широкое распространение получают электромеханические системы управления реверсивным устройством с применением электронной цифровой системы автоматического управления ГТД с полной ответственностью типа FADEC (full authority digital engine control).
Одной из важнейших проблем применения подобных электромеханических систем управления является обеспечение их надежности и отказобезопасности. При этом эффективным методом обеспечения надежной работы электромеханических систем управления является резервирование отдельных ее подсистем и элементов, а отказобезопасность электромеханических систем формируется на основе анализа последствий и критичности различных видов отказов ее составных частей.
Известен электромеханический реверсор тяги турбореактивного двигателя (Патент №RU 2313681, МПК F02K1/74, опубл. 27.12.2007), включающий цифровую систему управления двигателем с полной ответственностью типа FADEC с электронным регулятором двигателя, содержащим два электронных канала управления с возможностью выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства; два отдельных электронных блока управления реверсивным устройством, два электродвигателя, механически соединенные с двумя створками реверсивного устройства, выполненных с возможностью перемещения между открытым и закрытым положением, при этом каждая из указанных створок управляется отдельным электронным блоком управления электрически соединенным с соответствующим электронным каналом электронного регулятора двигателя; указанные электронные блоки управления реверсивным устройством соединены друг с другом для обмена данными.
К основным недостаткам данного аналога относится:
- усложнение конструкции двигателя из-за увеличения количества применяемых электронных блоков управления на двигателе, увеличения количества электрических линий связи, обеспечивающих взаимодействие электронных блоков управления между собой, а также из-за применения механической связи между створками. Следствием сложности конструкции является понижение надежности работы, увеличение материалоемкости и стоимости системы;
- увеличение массы двигателя из-за необходимости применения отдельного блока управления на каждую створку реверсивного устройства, а также увеличения количества электрических линий связи.
Известна архитектура системы для электромеханических систем
управления реверсором тяги (Патент US №6655125, МПК: F02K 1/76, F02K 1/54, опубл. 12.02.2003), в которой вышеуказанные недостатки устранены. Согласно описания данного аналога электромеханическая система управления реверсивным устройством содержит электронный регулятор двигателя из состава цифровой системы управления типа FADEC, который имеет два электронных канала управления с возможностью выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства; электронный блок управления (контроллер) реверсивным устройством, имеющий по меньшей мере два независимых канала управления; причем каждый канал электронного регулятора двигателя электрически соединен с соответствующим каналом электронного блока управления, а каждый канал электронного блока управления электрически соединен с соответствующим комплектом датчиков положения реверсивного устройства. Электропитание электронного блока управления осуществляется от каждого канала электронного регулятора двигателя, при этом силовое электропитание 115В переменного тока поступает только в первый канал электронного блока управления, а сама силовая нагрузка (электродвигатели для перемещения подвижных элементов реверсивного устройства) также подключена только к первому каналу электронного блока управления.
К основным недостаткам данного аналога относится:
- низкая отказобезопасность электромеханической системы управления, т.к. отсутствуют какие-либо сведения о конструктивных возможностях системы, обеспечивающих при отказе ее элементов переходить в режим работы, не представляющий опасности для функционирования реверсивного устройства и двигателя;
- недостаточная надежность (отказоустойчивость) электропитания электромеханической системы т.к. силовое питание 115В переменного тока подается только на первый канал электронного блока управления. Кроме того, электропитание электронного блока управления обеспечивается от электронного регулятора, а не от бортовой электросети. Это приводит к повышенному энергопотреблению цифровой системы управления, понижению надежности работы электронного регулятора двигателя и даже к его возможной неисправности в случае короткого замыкания в линиях связи электропитания электронного блока управления.
Известна электромеханическая система управления приводом с двойной избыточностью (Патент US №8583294, МПК: F02K 3/04, F02C 9/18, публ. 12.11.2013), в которой недостаток, обусловленный низкой отказобезопасностью, частично устранен. Данная система как наиболее близкая по технической сущности к вновь созданному техническому решению принята за прототип. Согласно описанию данного патента электромеханическая система управления реверсивным устройством газотурбинного двигателя, которая содержит электронный регулятор двигателя, имеющий, по меньшей мере, два электронных канала управления с возможностью обмена информацией между этими каналами и выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства; электронный блок управления реверсивным устройством, имеющий, по меньшей мере, два электронных канала управления с возможностью обмена информации между этими каналами; по меньшей мере два электромеханических привода, два комплекта датчиков положения подвижных элементов реверсивного устройства, дублированные электрические линии связи; электронный блок управления соединен с электромеханическими приводами, комплектами датчиков положения подвижных элементов реверсивного устройства, при этом в случае отказа обоих каналов электронного регулятора двигателя электронный блок управления реверсивным устройством выдает управляющую команду в электромеханический привод перемещать подвижные элементы реверсивного устройства в заранее определенную безопасную позицию. Один или оба из указанных двух каналов электронного регулятора двигателя могут сообщаться с одним или обоими из указанных двух каналов электронного блока управления для предоставления команд электронному блоку и для получения информации о состоянии от электронного блока.
Кроме того, из описания патента следует, что в маловероятном случае выхода из строя обоих каналов электронного регулятора, и, следовательно, при невозможности получения управляющих команд из цифровой системы управления двигателем электронный блок управления выдает команду исполнительным механизмам приводить подвижные компоненты в заранее определенную безопасную позицию. Эта позиция является той, когда самолет может безопасно функционировать в любых условиях, хотя и с ограниченной функциональностью или эффективностью.
Основным недостатком электромеханической системы, выбранной за прототип, является ее недостаточная отказобезопасность при неконтролируемых отказах применительно к управлению реверсивным устройством газотурбинного двигателя. Так, в случае возникновения неконтролируемого (т.е. не выявленного) отказа управляющего канала электронного регулятора двигателя возможна выдача ложной команды из этого управляющего канала в оба канала электронного блока управления на включение реверсивного устройства в полете. Подобная ситуация неизбежно приводит к возникновению обратной тяги двигателя и чрезмерной разнотяговости в воздухе, как следствие, к критическому развороту самолета, в наихудшей ситуации - полной потере управляемости. Причиной неконтролируемого отказа электронного регулятора двигателя может стать отказ применяемой элементной базы, сбой в работе программного обеспечения или электромагнитная помеха, например, из-за разряда высокомощной молнии или от иного источника электромагнитного излучения, а также сочетание вышеуказанных неисправностей.
Кроме того, в прототипе не показано в какую именно заранее определенную безопасную позицию должны приводиться подвижные элементы реверсивного устройства для различных этапов полета и режимов работы двигателя. Также не показано поведение электромеханической системы управления реверсивным устройством в случае выдачи одним из каналов электронного регулятора двигателя ложной команды на включение реверсивного устройства или ложной команды на выключение реверсивного устройства.
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения, и невозможно обеспечить при использовании прототипа, является недостаточная отказобезопасность электромеханической системы управления из-за неконтролируемого отказа управляющего канала электронного регулятора двигателя, из-за отсутствия конструктивных возможностей системы, обеспечивающих безаварийную работу двигателя в случае выдачи одним каналом электронного регулятора двигателя ложной команды на включение реверсивного устройства или ложной команды на выключение реверсивного устройства, а также из-за отсутствия конкретных сведений о том, в какую именно заранее определенную безопасную позицию должны приводиться подвижные элементы реверсивного устройства в случае выхода из строя цифровой системы типа FADEC полностью.
Технической задачей предлагаемого изобретения является повышение отказобезопасности электромеханической системы управления реверсивным устройством и двигателя в целом:
- за счет того, что каждый канал электронного регулятора двигателя соединен с соответствующим каналом электронного блока управления (т.е. только с одним каналом). Таким образом, в случае возникновения неконтролируемого отказа первого канала электронного регулятора двигателя некорректная управляющая команда на включение реверсивного устройства во второй канал электронного блока управления не поступает;
- за счет введения конструктивных возможностей системы, обеспечивающих безопасную (безаварийную) работу двигателя в случае выдачи первым или вторым каналом электронного регулятора двигателя ложной команды на включение реверсивного устройства или Ложной команды на выключение реверсивного устройства;
- за счет формирования фиксированной, заранее определенной безопасной позиции подвижных элементов реверсивного устройства в случае выхода из строя обоих каналов электронного регулятора двигателя, а именно осуществление закрытого положения реверсивного устройства;
- за счет своевременного информирования экипажа о невозможности включения реверсивного устройства в отказной ситуации.
Техническая проблема решается за счет того, что отказобезопасная электромеханическая система управления реверсивным устройством газотурбинного двигателя, которая содержит электронный регулятор двигателя, имеющий, по меньшей мере, два электронных канала управления с возможностью обмена информацией между этими каналами и выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства; электронный блок управления реверсивным устройством, имеющий, по меньшей мере, два электронных канала управления с возможностью обмена информации между этими каналами; по меньшей мере два электромеханических привода, два комплекта датчиков положения подвижных элементов реверсивного устройства, дублированные электрические линии связи; электронный блок управления соединен с электромеханическими приводами, комплектами датчиков положения подвижных элементов реверсивного устройства, при этом в случае отказа обоих каналов электронного регулятора двигателя электронный блок управления реверсивным устройством выдает управляющую команду в электромеханический привод перемещать подвижные элементы реверсивного устройства в заранее определенную безопасную позицию, согласно изобретению, каждый канал электронного регулятора двигателя электрически соединен с соответствующим каналом электронного блока управления, электронный блок управления дополнительно содержит модуль встроенного контроля электронного блока управления с возможностью выдачи выходного сигнала об исправном или неисправном состоянии каждого канала электронного блока управления, который подается в оба канала электронного регулятора, при этом выдача управляющей команды из электронного регулятора в электронный блок управления на перевод реверсивного устройства из закрытого положения в открытое положение выполняется только при исправном состоянии обоих каналов электронного регулятора и при исправном состоянии хотя бы одного канала электронного блока управления, а перевод реверсивного устройства из открытого положения в закрытое положение выполняется при исправном состоянии хотя бы одного канала электронного регулятора и исправном состоянии хотя бы одного канала электронного блока управления; при этом каждый канал электронного регулятора имеет возможность сформировать информационный сигнал о невозможности включения реверсивного устройства в случае отказа другого канала электронного регулятора.
Кроме того, согласно изобретению, заранее безопасной позицией является закрытое положение реверсивного устройства, а в электронном блоке управления реализован приоритет управляющей команды на закрытое положение реверсивного устройства, при этом в случае выдачи одним исправным каналом электронного регулятора выходной управляющей команды на открытие реверсивного устройства, а другим исправным Каналом электронного регулятора выходной управляющей команды на закрытие реверсивного устройства или при отсутствии такой команды, в электронном блоке управления осуществляется закрытое положение реверсивного устройства.
Кроме того, согласно изобретению, дополнительно введен блок мониторинга двигателя с возможностью формирования информационного сигнала о невозможности включения реверсивного устройства, при этом каждый канал электронного регулятора соединен с блоком мониторинга двигателя и в случае отказа любого из каналов электронного регулятора на выходе блок мониторинга двигателя формируется информационный сигнал о невозможности включения реверсивного устройства, который поступает в бортовую систему индикации и регистрации.
В отказобезопасной электромеханической системе управления реверсивным устройством газотурбинного двигателя содержатся электронный регулятор двигателя, по меньшей мере, два электронных канала управления с возможностью обмена информацией между этими каналами и выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства; электронный блок управления реверсивным устройством, имеющий по меньшей мере два электронных канала управления с возможностью обмена информации между этими каналами; по меньшей мере два электромеханических привода, два комплекта датчиков положения подвижных элементов реверсивного устройства, дублированные электрические линии связи; электронный блок управления соединен с электромеханическими приводами, комплектами датчиков положения подвижных элементов реверсивного устройства, при этом в случае отказа обоих каналов электронного регулятора двигателя электронный блок управления реверсивным устройством выдает управляющую команду в электромеханический привод перемещать подвижные элементы реверсивного устройства в заранее определенную безопасную позицию.
В отличии от прототипа, каждый канал электронного регулятора двигателя электрически соединен с соответствующим каналом электронного блока управления, электронный блок управления дополнительно содержит модуль встроенного контроля электронного блока управления с возможностью выдачи выходного сигнала об исправном или неисправном состоянии каждого канала электронного блока управления, который подается в оба канала электронного регулятора, при этом выдача управляющей команды из электронного регулятора в электронный блок управления на перевод реверсивного устройства из закрытого положения в открытое положение выполняется только при исправном состояний обоих каналов электронного регулятора и при исправном состоянии хотя бы одного канала электронного блока управления, а перевод реверсивного устройства из открытого положения в закрытое положение выполняется при исправном состоянии хотя бы одного канала электронного регулятора и исправном состоянии хотя бы одного канала электронного блока управления; при этом каждый канал электронного регулятора имеет возможность сформировать информационный сигнал о невозможности включения реверсивного устройства в случае отказа другого канала электронного регулятора.
Кроме того, заранее безопасной позицией является закрытое положение реверсивного устройства, а в электронном блоке управления реализован приоритет управляющей команды на закрытое положение реверсивного устройства, при этом в случае выдачи одним исправным каналом электронного регулятора выходной управляющей команды на открытие реверсивного устройства, а другим исправным каналом электронного регулятора выходной управляющей команды на закрытие реверсивного устройства или при отсутствии такой команды, в электронном блоке управления осуществляется закрытое положение реверсивного устройства.
Кроме того, дополнительно введен блок мониторинга двигателя с возможностью формирования информационного сигнала о невозможности включения реверсивного устройства, при этом каждый канал электронного регулятора соединен с блоком мониторинга двигателя и в случае отказа любого из каналов электронного регулятора на выходе блок мониторинга двигателя формируется информационный сигнал о невозможности включения реверсивного устройства, который поступает в бортовую систему индикации и регистрации.
Таким образом, достигается повышение отказобезопасности электромеханической системы управления реверсивным устройством и двигателя в целом.
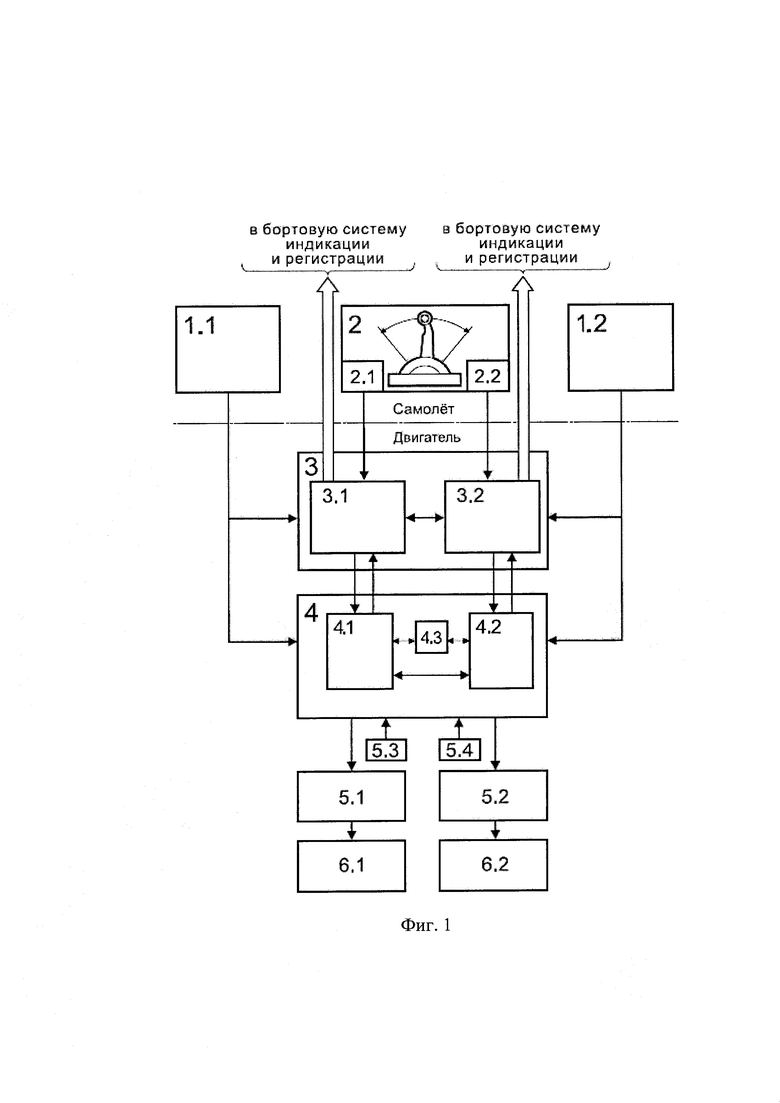
На фиг. 1 представлена блок-схема, иллюстрирующая пример реализации отказобезопасной электромеханической системы управления реверсивным устройством газотурбинного двигателя.
В состав блок-схемы входит блок 1.1 - первая бортовая система электроснабжения, блок 1.2 - вторая бортовая система электроснабжения, 2 - рычаг управления газотурбинным двигателем с датчиками 2.1 и 2.2, измеряющими угловое положение рычага управления двигателем, 3 - электронный регулятор двигателя, включающий первый канал 3.1 управления и второй канал 3.2 управления; электронный блок 4 управления реверсивным устройством, включающий первый канал 4.1 и второй канал 4.2, модуль 4.3 встроенного контроля электронного блока управления; первый 5.1 электромеханический привод и второй 5.2 электромеханический привод для открытия или закрытия реверсивного устройства, датчики положения 5.3 и 5.4, подвижные элементы 6.1 и 6.2 реверсивного устройства.
Блок 1.1 и блок 1.2 предназначены для независимого (раздельного, дублированного) электропитания электронного регулятора двигателя и электронного блока управления.
Рычаг управления 2 газотурбинным двигателем является типовым органом управления работой двигателя и размещается в кабине экипажа. Положение рычага управления двигателем (далее РУД) определяется двумя отдельными датчиками 2.1 и 2.2, которые входят в состав блока 2, но возможно применение двухканальных датчиков углового положения.
Электронный регулятор 3 двигателя представляет специализированную цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации и формирования управляющих и информационных сигналов согласно заданных алгоритмов работы. Электронный регулятор 3 включает два электронных независимых канала 3.1 и 3.2 с возможностью обмена информацией между этими каналами и выдачи каждым каналом управляющих команд в электронный блок управления на открытие или закрытие реверсивного устройства.
Электронный блок управления 4 также представляет собой цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации и формирования информационных и управляющих сигналов. Электронный блок управления регулятор 4 включает два электронных независимых канала 4.1 и 4.2 с возможностью обмена информацией между этими каналами и выдачи управляющих команд в электромеханические привода 5.1 и 5.2 на открытие или закрытие реверсивного устройства.
В качестве электромеханических приводов 5.1 и 5.2 могут быть использованы электромеханизмы поступательного действия. На самом деле количество электромеханических приводов может быть большим (3 и более единиц оборудования) или, по меньшей мере одним, что определяется конкретной конструкцией реверсивного устройства. Но для обеспечения отказоустойчивости системы и отказобезопасности двигателя, предпочтительно, чтобы их было не менее двух.
В качестве датчиков 5.3 и 5.4 положения подвижных элементов реверсивного устройства может быть использован датчик линейного перемещения штока электромеханизма, имеющим кинематическую связь с подвижным обтекателем, например, датчик перемещения индукционного, оптического, потенциометрического типа или иного принципа работы.
В качестве подвижных элементов реверсивного устройства 6.1 и 6.2 могут быть использованы Подвижный обтекатель, створки реверсивного устройства.
Электропитание от блоков 1.1 и 1.2 подается на соответствующие входы электронного регулятора 3 двигателя и электронного блока управления 4 реверсивного устройства. Выходы блока 2 соединены с первым и вторым каналами электронного регулятора 3. Первый 3.1 и второй 3.2 канал электронного регулятора 3 соединены соответственно с первым 4.1 и вторым 4.2 каналами электронного блока управления 4. Выход первого канала 4.1 электронного блока управления и выход второго канала 4.2 электронного блока управления соответственно соединены с первым и вторым каналами электронного регулятора 3. Первый выход электронного блока 4 соединен с входом электромеханического привода 5.1, а второй выход электронного блока 4 соединен с входом электромеханического привода 5.2. Выходная информация от датчиков 5.3 и 5.4 подается в электронный блок 4. Электромеханический привод 5.1 соединен механически с подвижным элементом 6.1 реверсивного устройства, а электромеханический привод 5.2 соединен механически с аналогичным подвижным элементом 6.2.
При штатной работе двигателя и отсутствии каких-либо отказов в электромеханической системе управления устройство работает следующим образом.
В полете управление тягой газотурбинного двигателя обеспечивается путем перемещения рычага 2 управления двигателем (РУД) в соответствующее положение. Угол положения РУД в течение всего полета (в воздухе и на земле) измеряется с помощью датчиков 2.1 и 2.2 и анализируется в каждом канале 3.1 и 3.2 электронного регулятора 3 двигателя для автоматического поддержания заданного уровня прямой и обратной тяги.
Обычно, включения реверсивного устройства в воздухе не производят. Кроме того, согласно изобретению, в течение всего полета в модуле встроенного контроля 4.3 электронного блока 4 управления осуществляют контроль исправного состояния обоих каналов электронного блока 4 с выдачей сигналов в соответствующий канал регулятора 3.
После приземления самолета и для его торможения экипаж переводит РУД в положение для включения реверсивного устройства. После такого перевода РУД и в случае исправных состояний электронного регулятора 3 и электронного блока 4 в электронном регуляторе 3 автоматически формируется управляющий сигнал из первого канала 3.1 электронного регулятора 3 в первый канал 4.1 электронного блока 4, а также управляющий сигнал из второго канала 3.2 электронного регулятора 3 во второй канал 4.2 электронного блока 4. Только при одновременном наличии на входе электронного блока 4 управляющих сигналов из каждого канала электронного регулятора 3 возможно включение реверсивного устройство. Затем на выходе блока 4 формируется управляющее воздействие на электропривод 5.1 и электропривод 5.2 для перевода подвижных элементов 6.1 и 6.2 реверсивного устройства из закрытого положения в открытое, тем самым обеспечивается перекладка реверсивного устройства в режим обратной тяги и торможение самолета. Далее, по мере необходимости реверсивное устройство выключают и обеспечивают руление самолета до стоянки.
При наличии различных видов отказов, выявляемых электронным регулятором 3 двигателя и модулем встроенного контроля 4.3 электронного блока 4, электромеханическая система управления работает следующим образом.
Так, при отказе любого канала электронного блока 4 управления и исправном состоянии другого канала электронного блока 4, исправном состоянии обоих каналов электронного регулятора включение и выключение реверсивного устройства осуществляется в штатном режиме и без ограничений, т.е. аналогично вышеизложенному. Тем самым обеспечивается отказоустойчивость электромеханической системы управления и двигателя в целом.
К тому же, заранее определенной безопасной позицией является закрытое положение реверсивного устройства, а в электронном блоке управления реализован приоритет управляющей команды на закрытое положение реверсивного устройства, при этом в случае выдачи одним исправным каналом электронного регулятора выходной управляющей команды на открытие реверсивного устройства, а другим исправным каналом электронного регулятора выходной управляющей команды на закрытие реверсивного устройства или при отсутствии такой команды, в электронном блоке управления осуществляется закрытое положение реверсивного устройства.
Перевод реверсивного устройства из открытого положения в закрытое положение поэтому осуществляется в штатном режиме и без ограничений при исправном состоянии хотя бы одного канала электронного регулятора и исправном состоянии хотя бы одного канала электронного блока управления электромеханическим приводом. Тем самым обеспечивается отказоустойчивость электромеханической системы управления и двигателя в целом.
В случае отказа одного из каналов электронного регулятора 3 формирование выходной управляющей команды на включение реверсивного устройства из отказавшего канала электронным регулятором 3 блокируется. Как следствие, выдачи управляющей команды из электронного блока 4 в электромеханические приводы 5.1 и 5.2 не происходит, реверсивное устройство не включается.
К тому же, в систему управления дополнительно введен блок мониторинга двигателя (без позиции) с возможностью формирования информационного сигнала о невозможности включения реверсивного устройства, при этом каждый канал электронного регулятора соединен с блоком мониторинга двигателя и в случае отказа любого из каналов электронного регулятора на выходе блок мониторинга двигателя формируется информационный сигнал о невозможности включения реверсивного устройства, который поступает в бортовую систему индикации и регистрации.
Не включение реверсивного устройства не является неожиданным для экипажа, т.к. информация о данном отказе регулятора 3 поступает в бортовую систему индикации (в кабину экипажа) и у экипажа есть возможность выполнить предупреждающие действия согласно руководству по летной эксплуатации. В более общем случае информация об отказе одного из каналов электронного регулятора двигателя может также поступать в блок мониторинга двигателя (без позиции), который имеет возможность формирования информационного сигнала в кабину экипажа о невозможности включения реверсивного устройства при наличии отказа канала электронного регулятора. Тем самым надежно обеспечивается отказобезопасность электромеханической системы управления и двигателя в целом.
Информация об отказе регулятора 3 также фиксируется в бортовой системе регистрации. Передача информации об отказе регулятора 3 в блок мониторинга двигателя и в бортовую систему регистрации, а также передача информационного сигнала о невозможности включения реверсивного устройства из блока мониторинга двигателя в кабину экипажа может осуществляться по кодовым линиям связи, например, согласно ARINC-429.
В ситуации, когда реверсивное устройство уже включено и одновременно произошел маловероятный отказ обоих каналов электронного регулятора 3 или маловероятный отказ обоих каналов электронного блока 4, модуль встроенного контроля 4.3 из состава электронного блока 4 выявляет данную ситуацию, а сам электронный блок 4 управления реверсивным устройством выдает управляющую команду в электромеханические привода 5.1 и 5.2 перемещать подвижные элементы реверсивного устройства в заранее определенную безопасную позицию, а именно в закрытое положение, таким образом действие обратной тяги двигателя прекращается.
В случае неконтролируемого отказа работающего канала электронного регулятора и выдачи этим каналом электронного регулятора выходной управляющей команды на открытие реверсивного устройства, а в другом исправном канале электронного регулятора такой выходной управляющей команды на закрытие реверсивного устройства нет (отсутствует), то в электронном блоке управления осуществляется закрытое положение реверсивного устройства, команды на открытие реверсивного устройства в блоки 5.1 и 5.2 не выдается. Тем самым также обеспечивается отказобезопасность электромеханической системы управления и двигателя в целом.
В случае появления на входе любого канала электронного блока 4 одновременно команды на включение и выключение реверсивного устройства, например, из-за короткого замыкания в электрических линиях связи системы или электромагнитной помехи, подобная ситуация также будет выявлена модулем встроенного контроля 4.3 электронного блока 4 и выдачи команд на включение реверсивного устройства не произойдет.
В качестве реверсивного устройства предпочтительно применение реверсивного устройства решетчатого типа. Подобная конструкция реверсивного устройства является достаточно распространенной и используется, например, в газотурбинном двигателе ПС-90А для самолетов Ил-96-300 и Ту-204/214. Но в более общем случае могут быть применены иные конструкции реверсивного устройства, например, створчатого или ковшового типа.
В качестве электроприводов 5.1 и 5.2 могут быть применены электромеханизмы из состава RU №175 530 (МПК: F02K 1/76, B64D 29/00, B64D 31/00, опубл. 07.12.2017) или электромеханизмы по типу RU №2 531 208 (МПК Н02K 7/116, В64С 13/50, опубл. 20.10.2014).
Организация электропитания электромеханической системы от блоков 1.1 и 1.2 показана только для примера, не является целью настоящего изобретения и может быть аналогичной RU №2525884 (МПК F02K 1/76, опубл. 20.08.2014).
В качестве блока мониторинга двигателя может быть использована электронная аппаратура системы контроля и диагностики типа БСКД газотурбинного двигателя ПС-90А («Авиационный двигатель ПС-90А» под редакцией Иноземцева А.А., изд. М.: Либра-К, 2007, стр. 235-255)
Таким образом, предлагаемое изобретение с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволяет повысить отказобезопасность электромеханической системы и двигателя, безопасность полета в целом за счет отказоустойчивого электрического соединения электронного регулятора двигателя с электронным блоком управления, за счет введения конструктивных возможностей системы, обеспечивающих безопасную (безаварийную) работу двигателя в случае выдачи первым или вторым каналом электронного регулятора двигателя неконтролируемых и ложных команд, за счет осуществления закрытого положения реверсивного устройства в случае выхода из строя электронного регулятора двигателя и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическая система управления реверсивным устройством газотурбинного двигателя | 2020 |
|
RU2757949C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2783048C1 |
| Электромеханическая система управления реверсивным устройством газотурбинного двигателя с высоконадежным электропитанием | 2020 |
|
RU2757744C1 |
| Способ и устройство управления реверсированием тяги газотурбинного двигателя самолёта | 2024 |
|
RU2828300C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕВЕРСИРОВАНИЕМ ТЯГИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ САМОЛЁТА | 2021 |
|
RU2778962C1 |
| СПОСОБ АВАРИЙНОЙ ЗАЩИТЫ ТУРБОРЕАКТИВНОГО ДВУХКОНТУРНОГО ДВУХВАЛЬНОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ ЕГО РОТОРОВ | 2023 |
|
RU2810866C1 |
| Способ управления газотурбинным двигателем при самопроизвольном открытии реверсивного устройства | 2021 |
|
RU2774010C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| Автономное интегрированное устройство регистрации параметров авиационного газотурбинного двигателя | 2017 |
|
RU2664901C1 |
| Способ управления газотурбинным двигателем электронно-гидромеханической системой | 2022 |
|
RU2795360C1 |
Изобретение может быть использовано в газотурбинном двигателестроении, в частности в системах автоматического управления реверсивными устройствами авиационных газотурбинных двигателей. Отказобезопасная электромеханическая система управления реверсивным устройством газотурбинного двигателя содержит электронный регулятор (3) двигателя, электронный блок (4) управления реверсивным устройством по меньшей мере два электромеханических привода (5.1), (5.2), два комплекта датчиков (5.3), (5.4) и дублированные электрические линии связи. Электронный регулятор (3) имеет по меньшей мере два электронных канала (3.1), (3.2) управления с возможностью обмена информацией между этими каналами и выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства. Электронный блок (4) управления реверсивным устройством имеет по меньшей мере два электронных канала (4.1), (4.2) управления с возможностью обмена информации между этими каналами. Электронный блок (4) управления соединен с электромеханическими приводами (5.1), (5.2), комплектами датчиков положения (5.3), (5.4). В случае отказа обоих каналов (3.1), (3.2) электронного регулятора (3) двигателя электронный блок (4) управления реверсивным устройством выдает управляющую команду в электромеханический привод (5.1), (5.2) перемещать подвижные элементы (6.1), (6.2) реверсивного устройства в заранее определенную безопасную позицию. Каждый канал (3.1), (3.2) электронного регулятора (3) двигателя соединен с соответствующим каналом (4.1), (4.2) электронного блока (4) управления. Электронный блок (4) управления дополнительно содержит модуль (4.3) встроенного контроля электронного блока управления с возможностью выдачи выходного сигнала об исправном или неисправном состоянии каждого канала (4.1), (4.2) электронного блока управления, который подается в оба канала (3.1), (3.2) электронного регулятора. Выдача управляющей команды из электронного регулятора (3) в электронный блок (4) управления на перевод реверсивного устройства из закрытого положения в открытое положение выполняется только при исправном состоянии обоих каналов (3.1), (3.2) электронного регулятора и при исправном состоянии хотя бы одного канала (4.1) или (4.2) электронного блока управления. Перевод реверсивного устройства из открытого положения в закрытое положение выполняется при исправном состоянии хотя бы одного канала (3.1) или (3.2) электронного регулятора и исправном состоянии хотя бы одного канала (4.1) или (4.2) электронного блока управления. Технический результат заключается в повышении отказобезопасности электромеханической системы управления реверсивным устройством и двигателя в целом. 2 з.п. ф-лы, 1 ил.
1. Отказобезопасная электромеханическая система управления реверсивным устройством газотурбинного двигателя, которая содержит электронный регулятор двигателя, имеющий, по меньшей мере, два электронных канала управления с возможностью обмена информацией между этими каналами и выдачи каждым каналом управляющих команд на открытие или закрытие реверсивного устройства; электронный блок управления реверсивным устройством, имеющий, по меньшей мере, два электронных канала управления с возможностью обмена информации между этими каналами; по меньшей мере, два электромеханических привода, два комплекта датчиков положения подвижных элементов реверсивного устройства, дублированные электрические линии связи; электронный блок управления соединен с электромеханическими приводами, комплектами датчиков положения, при этом в случае отказа обоих каналов электронного регулятора двигателя электронный блок управления реверсивным устройством выдает управляющую команду в электромеханический привод перемещать подвижные элементы реверсивного устройства в заранее определенную безопасную позицию, отличающаяся тем, что каждый канал электронного регулятора двигателя соединен с соответствующим каналом электронного блока управления, электронный блок управления дополнительно содержит модуль встроенного контроля электронного блока управления с возможностью выдачи выходного сигнала об исправном или неисправном состоянии каждого канала электронного блока управления, который подается в оба канала электронного регулятора, при этом выдача управляющей команды из электронного регулятора в электронный блок управления на перевод реверсивного устройства из закрытого положения в открытое положение выполняется только при исправном состоянии обоих каналов электронного регулятора и при исправном состоянии хотя бы одного канала электронного блока управления, а перевод реверсивного устройства из открытого положения в закрытое положение выполняется при исправном состоянии хотя бы одного канала электронного регулятора и исправном состоянии хотя бы одного канала электронного блока управления.
2. Отказобезопасная электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 1, отличающаяся тем, что заранее определенной безопасной позицией является закрытое положение реверсивного устройства, а в электронном блоке управления реализован приоритет управляющей команды на закрытое положение реверсивного устройства, при этом в случае выдачи одним исправным каналом электронного регулятора выходной управляющей команды на открытие реверсивного устройства, а другим исправным каналом электронного регулятора выходной управляющей команды на закрытие реверсивного устройства или при отсутствии такой команды, в электронном блоке управления осуществляется закрытое положение реверсивного устройства.
3. Отказобезопасная электромеханическая система управления реверсивным устройством газотурбинного двигателя по п. 1, отличающаяся тем, что дополнительно введен блок мониторинга двигателя с возможностью формирования информационного сигнала о невозможности включения реверсивного устройства, при этом каждый канал электронного регулятора соединен с блоком мониторинга двигателя и в случае отказа любого из каналов электронного регулятора на выходе блок мониторинга двигателя формирует информационный сигнал о невозможности включения реверсивного устройства, который поступает в бортовую систему индикации и регистрации.
| US 8583294 B2, 12.11.2013 | |||
| US 6439504 B1, 27.08.2002 | |||
| US 6655125 B2, 02.12.2003 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С УСТРОЙСТВОМ ПОСТОЯННОГО КОНТРОЛЯ ПОЛОЖЕНИЯ | 2003 |
|
RU2313681C2 |
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2142569C1 |
| БЕСКОНТАКТНОЕ ПЕРЕКЛЮЧАЮЩЕЕ УСТРОЙСТВО С ГАЛЬВАНИЧЕСКИ РАЗВЯЗАННЫМИ ТРАНЗИСТОРНЬ!Л\ИКЛЮЧАМИ | 0 |
|
SU175530A1 |

