Изобретение относится к области газотурбинного двигателестроения и может быть использовано в системах управления авиационных двухконтурных двухвальных двигателей, а также в газотурбинных установках для электростанций, нагнетателей магистральных газопроводов, силовых газотурбинных установок морских и речных судов и т.д.
В процессе эксплуатации газотурбинных двигателей (ГТД) иногда наблюдаются случаи неуправляемого увеличения расхода топлива Gт в камеру сгорания двигателя, которые приводят к забросам частоты вращения роторов и/или температуры газов за турбиной. Возможными причинами таких забросов являются неисправности, возникающие в системах управления, такие как: нелокализованные отказы электронных регуляторов двигателя или механизмов дозирования Gт, не выявленные системой встроенного контроля; ошибки и сбои программного обеспечения, воздействие внешних воздействующих факторов, таких как повышенная температура окружающей среды, пожар и т.д.
К негативным последствиям забросов частоты вращения роторов относится возможная поломка основных деталей и сборочных единиц с последующей потерей тяги (мощности) двигателя. Но наиболее опасным последствием разрушения двигателя из-за чрезмерной раскрутки роторов являются возникновение и вылет за пределы корпуса двигателя нелокализованных фрагментов ротора с высокой кинетической энергией, способных вызвать повреждение самого воздушного судна, неуправляемый пожар, разрушение узлов подвески двигателя, приводящее к отделению двигателя от воздушного судна или возникновение реактивной тяги в направлении, противоположном заданному.
Незначительные забросы частот вращения ротора ГТД зачастую устраняются летчиком вручную, например, путем перемещения рычага управления двигателя на пониженный режим или за счет включения стоп-крана двигателя, отсекающим подачу топлива в камеру сгорания двигателя. Однако по мере усложнения конструкций авиационной техники обеспечение аварийной защиты двигателей только на основе оперативных действий экипажа является крайне затрудненным и практически неприемлемым. В этой связи для обеспечения безопасности полетов и безаварийной работы двигателя актуально применение автономных блоков защиты двигателей от чрезмерной раскрутки роторов из-за отказов, приводящих к неуправляемому увеличению расхода топлива Gт в двигатель.
Известен способ защиты судовой установки (Патент RU 2493393, опубликовано: 20.09.2013 Бюл. №26), заключающийся в том, что в локальной системе управления газотурбинной силовой установке (ГТУ) судов различного назначения дополнительно с помощью автономного блока защиты двигателя (БЗД) измеряют частоту вращения силовой турбины ГТУ, обеспечивающей привод судового винта, сравнивают измеренное значение частоты вращения с наперед заданным предельным значением, при увеличении частоты вращения силовой турбины выше наперед заданного предельного с помощью БЗД полностью прекращают подачу топлива в камеру сгорания ГТУ и формируют сигнал «Защита по раскрутке силовой турбины» для его передачи в систему управления судном.
Недостатком данного способа является то, что в случае ошибочных измерений частоты вращения силовой турбины, например, из-за переменного контакта в электропроводке, не выявленного системой встроенного контроля, возможно ложное срабатывание БЗД и останов ГТУ судна.
Известен способ работы автономного блока защиты двигателя ГТУ (патент RU 2776229, опубликовано: 14.07.2022 Бюл. №20), заключающийся в измерении частоты вращения силовой турбины с помощью четырех модулей и измерении температуры газов в камере сгорания ГТУ с помощью двух других модулей, в сравнении измеренных величин с заранее установленными пороговыми значениями, и при их превышении пороговых значений формируют аварийный сигнал для останова ГТУ.
К недостаткам способа относится:
- потенциально низкая надежность датчиков температуры газов в камере сгорания ГТУ, связанная с их эксплуатацией в условиях экстремальных температур, в т.ч. при забросах Gт. Кроме того, замена отказавшего датчика температуры газов приводит к необходимости останова ГТУ для ремонта;
- наличие повышенного количества ложных остановов ГТУ, т.к. срабатывание БЗД происходит по любому превышению частоты вращения. Действительно, если три независимых и исправно работающих канала частоты не показали заброса частоты, а четвертый зафиксировал заброс, то останов ГТУ не представляется достоверно обоснованным.
Известно автоматическое устройство топливопитания газотурбинного двигателя (патент RU 2398124, опубликовано: 27.08.2010 Бюл. №24), которое содержит канал питания топливом, устройство измерения расхода топлива Gт в канале (расходомер), первый управляемый клапан с изменяемым отверстием, установленный в канале питания, систему управления, связанную с расходомером и с первым клапаном для управления этим клапаном с тем, чтобы подавать в двигатель требуемый расход топлива в режиме нормального функционирования двигателя, второй управляемый клапан с изменяемым отверстием, установленный в канале питания последовательно с первым клапаном, и средство управления вторым клапаном, позволяющее за счет слива избытка топлива выдавать в камеру сгорания ГТД уменьшенный расход топлива Gт (без полного прекращения) в ответ на выявление чрезмерного повышения частоты вращения или чрезмерной тяги, когда становится ясно, что реакции первого клапана недостаточно для парирования заброса частоты вращения ротора двигателя.
Управление вышеуказанными регулируемыми клапанами осуществляется электронным регулятором из состава FADEC. Согласно данного патента возможна установка третьего дискретного клапана, обеспечивающего полную отсечку топлива. Включение третьего клапана может осуществляться автоматически системой FADEC или вручную экипажем.
Недостатком данного аналога является его пониженная отказоустойчивость. Так, если управление тремя клапанами будет осуществлять одно автоматическое устройство - электронный регулятор двигателя то, в случае его отказа или отказа его критического элемента, например, блока питания или вычислителя, возможно невыполнение функции аварийной зашиты ГТД в автоматическом режиме, что недопустимо.
Кроме того, идентификация и парирование заброса Gт осуществляется на основе измерения частоты вращения ротора двигателя. Такой подход уместен для одновальных ГТД, для двух- и трехвальных турбомашин он несет некоторую неопределенность. Кроме того, применительно к турбореактивным двухвальным двухконтурным двигателям с большой степенью двухконтурности (>4) знаний только об одной частоте вращения ротора высокого давления может оказаться недостаточным для достоверного и надежного определения факта заброса тяги.
В качестве прототипа выбран способ управления газотурбинным двигателем (патент RU 2417326, опубликовано: 27.04.2011 Бюл. №12), заключающийся в том, что в электронном регуляторе двигателя с помощью датчиков электронного регулятора измеряют положение рычага управления двигателем (РУД) и параметры ГТД, в зависимости от положения РУД и значения параметров ГТД по законам управления, реализованным в электронном регуляторе, формируют управляющее воздействие электронного регулятора, в гидромеханическом регуляторе (ГМР) с помощью датчиков ГМР измеряют положение РУД и параметры ГТД в зависимости от положения РУД и значения параметров ГТД по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном электронном регуляторе с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие электронного регулятора подают на блок исполнительных элементов (ИЭ) и осуществляют управление ГТД, дополнительно в автономном электронном блоке (ЭБ) с помощью датчиков ЭБ измеряют и контролируют частоту вращения ротора вентилятора двигателя и частоту вращения турбины вентилятора двигателя, в ГМР с помощью датчиков ГМР измеряют частоту вращения ротора компрессора двигателя, если частота вращения ротора компрессора превышает наперед заданное значение, в ГМР формируют команду и с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем от ГМР, если рассогласование между частотой вращения ротора вентилятора и частотой вращения турбины вентилятора превышает наперед заданное значение, или ускорение турбины вентилятора превышает наперед заданное значение, или частота вращения турбины вентилятора превышает наперед заданное значение, с помощью ЭБ прекращают подачу топлива в камеру сгорания и выключают двигатель.
Недостатками прототипа являются:
- для современных типов авиационных двигателей коммерческого назначения характерно применение электронных систем управления с полной ответственностью, т.е. с полным набором выполняемых функций без гидромеханического резервирования и использования низкоэффективного гидромеханического регулятора, поэтому прототип имеет ограниченную зону применения;
- аварийную функцию защиты двухвального двигателя от раскрутки турбины низкого давления (вентилятора) в случае поломки вала турбины низкого давления целесообразно выполнять в другом отдельном блоке и со своим комплектом датчиков, а не в автономном электронном блоке согласно прототипа. Это связано с тем, что возможной причиной раскрутки является отказ самого электронного регулятора. Специалистам хорошо известно множество подобных автономных систем защиты турбины низкого давления от раскрутки, и эта технология не является целью настоящего изобретения;
- использование только одного параметра частоты вращения вентилятора может оказаться недостаточным для достоверного и надежного определения факта заброса тяги двухвальных турбомашин, например, в случае кратковременного сбоя в работе датчика частоты вращения вентилятора или модуля обработки его сигнала.
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения, и невозможно обеспечить при использовании прототипа, является пониженная функциональная надежность и отказоустойчивость автономного блока защиты двигателя.
Технической задачей изобретения является повышение функциональной надежности и отказоустойчивости аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов при неуправляемом увеличении расхода топлива Gт в камеру сгорания двигателя, исключение ложных срабатываний автономного блока защиты двигателя.
Техническая проблема решается тем, что в способе аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов заключающийся в том, что в электронном регуляторе двигателя с помощью датчиков электронного регулятора измеряют положение рычага управления двигателем (РУД) и параметры двигателя, в зависимости от положения РУД и значения параметров двигателя по программам управления, реализованным в электронном регуляторе, формируют управляющие воздействия электронного регулятора, которые подают на блок исполнительных элементов и осуществляют управление двигателем, кроме того в автономном электронном блоке защиты двигателя с помощью датчика измеряют частоту вращения nв ротора вентилятора двигателя, сравнивают частоту вращения nв ротора вентилятора с первым наперед заданным расчетным предельным значением nв1зад, согласно изобретению, расчетным образом заранее определяют второе наперед заданное расчетное значение nв2зад, а также первое значение частоты вращения ротора высокого давления nвд1зад и второе значение частоты вращения ротора высокого давления nвд2зад, дополнительно вводят значения частоты nв2зад, nвд1зад, nвд2зад в автономный электронный блок защиты двигателя, также вводят в конструкцию двигателя датчик частоты вращения ротора высокого давления nвд, в автономном электронном блоке защиты двигателя с помощью датчика измеряют частоту вращения ротора высокого давления nвд, также дополнительно сравнивают nв с nв2зад и nвд с nвд1зад, nвд2зад, и если одновременно частота вращения nв превысит nв1зад и частота вращения nвд превысит nвд1зад или одновременно частота вращения nвд превысит наперед заданное предельное значение nвд2зад и частота вращения nв превысит наперед заданное предельное значение nв2зад, то с помощью автономного электронного блока защиты двигателя прекращают подачу топлива в камеру сгорания и выключают двигатель.
Кроме того, согласно изобретению, параметр nв1зад>nв2зад, nвд2зад>nвд1зад.
Кроме того, согласно изобретению, параметр nв1зад выбирают на 5…10% более максимально допустимого значения частоты вращения ротора вентилятора nв двигателя, но менее чем на 8…10% значения частоты вращения nв, при которой, в соответствии с нормами прочности двигатель должен сохранять свою целостность (отсутствие фрагментов ротора вентилятора с высокой кинетической энергией); а параметр nвд1зад выбирают по результатам математического моделирования поведения nвд при раскрутке частоты вращения nв.
Кроме того, согласно изобретению, параметр nвд2зад выбирают на 5…10% более максимально допустимого значения частоты вращения nвд двигателя, но менее чем на 8…10% значения частоты вращения ротора высокого давления nвд, при которой, в соответствии с нормами прочности двигатель должен сохранять свою целостность (отсутствие фрагментов ротора высокого давления с высокой кинетической энергией); а параметр nв2зад выбирают по результатам математического моделирования поведения nв при раскрутке частоты вращения nвд.
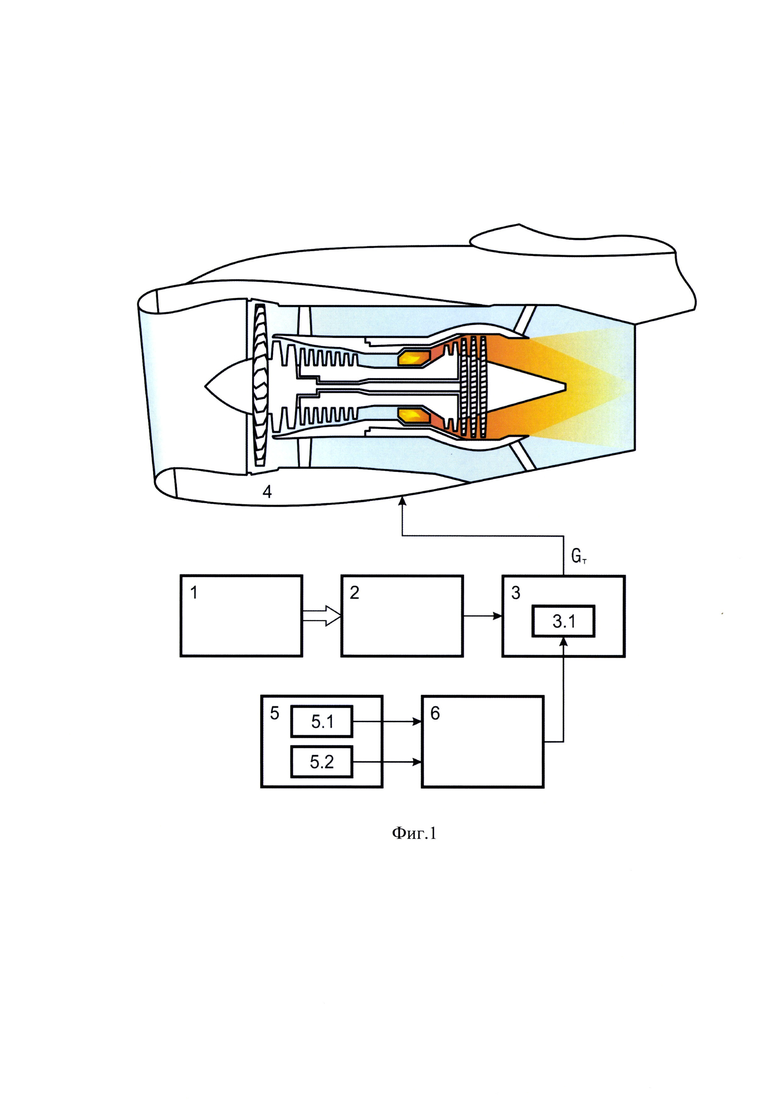
На фиг. 1 представлена схема устройства, реализующая заявляемый способ. Устройство содержит последовательно соединенные блок 1 датчиков параметров ГТД, электронный регулятор 2, дозатор топлива 3 с электромагнитом отсечки топлива 3.1, газотурбинный двигатель 4, также последовательно соединенные блок 5 датчиков частоты вращения роторов 5.1 и 5.2, блок 6 защиты от раскрутки роторов двигателя 4.
Блок 1 датчиков представляет собой совокупность датчиков и сигнализаторов (не показаны), которые обеспечивают измерение параметров рабочего процесса ГТД 4: частоту вращения роторов вентилятора nв и высокого nвд давлений, давления воздуха за компрессором Рк*, температуру газов за турбиной Тг и др., измерение положения рычага управления двигателем Lруд, а также параметров условий полета (температура и давление воздуха на входе в ГТД Твх*, Рвх*), измерение управляющих воздействий - расход топлива Gт в камере сгорания, положение ВНА Lвна, положение иных элементов ГТД 4 и самолета.
Электронный регулятор 2 ГТД 3 представляет специализированную цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации от датчиков блока 1, формирования управляющих воздействий, приема/выдачи информационных сигналов (не показано) согласно заданным программам управления для обеспечения необходимого уровня тяги и надежной работы ГТД 4.
Электронный регулятор 2 двигателя является основным устройством цифровой системы управления ГТД 4 типа FADEC (Full Authority Digital Engine Control). Таким устройством, например, в составе турбореактивного двухконтурного двигателя ПС-90А для Ил-96-300 и Ту-214/-204 является электронный регулятор двигателя РЭД-90; или его международный аналог -цифровой блок EEC (Electronic Engine Control) в составе авиационного двигателя CFM56-7B для самолетов Boeing 737.
Дозатор 3 топлива предназначен для автоматического дозирования топлива в камеру сгорания ГТД 4 по заданным программам. Обычно в статике и в динамике электронный регулятор 2, подавая электрическую команду в дозатор 3, обеспечивает перемещение дозирующего элемента дозатора 3 до тех пор, пока фактическое значение расхода топлива Gт, определяемое электронным регулятором 2, не сравняется с расчетным, которое необходимо в данный момент для поддержания требуемого уровня тяги ГТД 4. В состав дозатора топлива 3 входит клапан 3.1 останова, представляющий собой типовой отсечной электромагнитный клапан, перекрывающий магистраль подачи топлива в камеру сгорания ГТД 4 по команде из автономного блока аварийной защиты 6.
Газотурбинный двигатель 4 преимущественно турбореактивный двухвальный (двухроторный) двухконтурный двигатель, например, типа ПС-90А.
Блок 5 датчиков частот вращения роторов ГТД 4 представляет собой два отдельных типовых датчика 5.1 частоты вращения ротора вентилятора nв и частоты 5.2 вращения nвд ротора высокого давления ГТД 4. Конструкция датчиков частоты вращения может быть самой разнообразной, но предпочтительно применять магнитоэлектрические датчики, как наиболее точные и надежные. Выходные сигналы датчиков 5.1 и 5.2 подаются на вход блока 6 защиты от раскрутки роторов двигателя 4.
Блок 6 - блок защиты двигателя от раскрутки ротора вентилятора или ротора компрессора высокого давления. Представляет собой электронный цифровой блок для получения входной информации от датчиков частоты вращения nв, nвд блока 5 и в случае заброса частот вращения роторов формирование управляющего сигнала для прекращения подачи топлива в камеру сгорания ГТД путем включения электромагнитного клапана отсечки топлива 3.1.
В блоке 6 защиты двигателя запрограммировано четыре заданных (предельных) значения, два - по каналу nв и два по каналу nвд; а именно nв1зад, nв2зад, nвд1зад, nвд2зад.
Как отмечалось выше, факт выявления заброса частоты вращения роторов (сущность изобретения) определяется в одновременном забросе параметров nв и nвд; такой подход исключает ложные срабатывания блока защиты в случае кратковременного сбоя измерения одного канала измерения частоты вращения.
В зависимости от условий полета, режима работы двигателя, динамических свойств роторов, типа отказа возможен заброс nв с некоторым увеличением nвд, и наоборот - заброс nвд с некоторым увеличением nв. Эти особенности учитываются при назначении четырех заданных значения, причем nв1зад>nв2зад, nвд2зад>nвд1зад. Параметр nв1зад выбирают на 5…10% более максимально допустимого значения частоты вращения ротора вентилятора nв двигателя (обычно соответствующее программному значению на взлетном режиме), но менее чем на 8…10% значения частоты вращения nв, при которой, в соответствии с нормами прочности двигатель должен сохранять свою целостность (отсутствие фрагментов ротора вентилятора с высокой кинетической энергией); а параметр nвд1зад выбирают по результатам математического моделирования поведения nвд при раскрутке частоты вращения nв. Параметр nвд2зад выбирают на 5…10% более максимально допустимого значения частоты вращения nвд двигателя (обычно соответствующее программному значению на взлетном режиме), но менее чем на 8…10% значения частоты вращения ротора высокого давления nвд, при которой, в соответствии с нормами прочности двигатель должен сохранять свою целостность (отсутствие фрагментов ротора высокого давления с высокой кинетической энергией); а параметр nв2зад выбирают по результатам математического моделирования поведения nв при раскрутке частоты вращения nвд.
Устройство работает следующим образом.
В штатных условиях управление режимом работы двигателя 4 осуществляется согласно заданного положения рычага управления двигателем и условий полета. С помощью датчиков 5.1 и 5.2 блоком аварийной защиты 6 выполняется измерение частоты вращения nв и nвд; раскрутки роторов нет и поэтому клапан отсечки 3.1 не включен, т.е. находится в открытом состоянии и топливо беспрепятственно поступает в двигатель. В случае отказа топливорегулирующей аппаратуры возможно самопроизвольное увеличение расхода топлива в камеру сгорания двигателя. В результате увеличения расхода топлива неизбежна раскрутка ротора газогенератора (компрессора высокого давления) nвд и соответствующая газодинамическая раскрутка ротора вентилятора nв. В ситуации, когда одновременно частота вращения nв превысит nв1зад и частота вращения nвд превысит nвд1зад, то в автономном электронном блоке защиты формируется управляющий сигнал на включение электромагнитного клапана отсечки топлива 3.1. дозатора 3, таким образом происходит прекращение подачи топлива в камеру сгорания ГТД 4. В случае, если одновременно частота вращения nвд превысит наперед заданное предельное значение nв2зад, частота вращения nв превысит наперед заданное предельное значение nв2зад, то также произойдет срабатывание блока защиты и включение электромагнитного клапана отсечки топлива 3.1 с последующим прекращением подачи топлива в камеру сгорания ГТД.
Предложенный способ аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов был проверен в составе авиационного газотурбинного двигателя ПД-14 разработки АО «ОДК-Авиадвигатель», РФ. Авиационный двигатель ПД-14 тягой 14 тонн - головной двигатель семейства перспективных турбореактивных двигателей пятого поколения, предназначенных для ближне-, среднемагистральных самолетов и промышленных газотурбинных установок. Двигатель ПД-14 -двухконтурный, двухвальный. Система автоматического управления двигателем САУ-14 разработки АО «ОДК-СТАР» является цифровой, с полной ответственностью FADEC. Расчет и назначение параметров nв1зад, nв2зад, nвд1зад, nвд2зад блока защиты двигателя осуществляли по результатам моделирования работы ГТД для различных условий полета, режима работы двигателя, имитации множества отказов в системе управления, а также с учетом требований авиационных властей. Результаты испытаний ПД-14 полностью подтвердили эффективность технического решения согласно настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ДВУХКОНТУРНОГО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ ТУРБИНЫ НИЗКОГО ДАВЛЕНИЯ | 2015 |
|
RU2602644C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ РОТОРОВ ПРИ ПОЖАРЕ | 2023 |
|
RU2825767C1 |
| СПОСОБ ДИАГНОСТИКИ И ПАРИРОВАНИЯ ОТКАЗОВ ДАТЧИКОВ РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ ДВУХКАНАЛЬНОЙ ЭЛЕКТРОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2817573C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ РАСКРУТКИ ЕГО РОТОРОВ С ПОМОЩЬЮ АВТОНОМНОГО БЛОКА ЗАЩИТЫ | 2023 |
|
RU2819128C1 |
| СПОСОБ КОНТРОЛЯ ТЕПЛОВОГО СОСТОЯНИЯ ЭЛЕКТРОННОГО РЕГУЛЯТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2817575C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| Способ автоматической защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2789806C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ ПОМПАЖА КОМПРЕССОРА | 2023 |
|
RU2801768C1 |
| Способ защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2798129C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕПУСКОМ ВОЗДУХА В КОМПРЕССОРЕ ДВУХВАЛЬНОГО ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2098668C1 |
Изобретение относится к области газотурбинного двигателестроения и может быть использовано в системах управления авиационных двухконтурных двухвальных двигателей, а также в газотурбинных установках для электростанций, нагнетателей магистральных газопроводов, силовых газотурбинных установок морских и речных судов и т.д. Предложен способ аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов, заключающийся в том, что в электронном регуляторе двигателя с помощью датчиков электронного регулятора измеряют положение рычага управления двигателем и параметры двигателя, в зависимости от положения рычага управления двигателем и значения параметров двигателя по программам управления, реализованным в электронном регуляторе, формируют управляющие воздействия электронного регулятора и осуществляют управление двигателем. Также в автономном электронном блоке защиты двигателя с помощью датчика измеряют частоту вращения nв ротора вентилятора двигателя, сравнивают частоту вращения nв ротора вентилятора с первым наперед заданным расчетным предельным значением nв1зад. Расчетным образом заранее определяют второе наперед заданное расчетное значение nв2зад, а также первое значение частоты вращения ротора высокого давления nвд1зад и второе значение частоты вращения ротора высокого давления nвд2зад, дополнительно вводят значения частоты nв2зад, nвд1зад, nвд2зад в автономный электронный блок защиты двигателя, также вводят в конструкцию двигателя датчик частоты вращения ротора высокого давления nвд, в автономном электронном блоке защиты двигателя с помощью датчика измеряют частоту вращения ротора высокого давления nвд, также дополнительно сравнивают nв с nв2зад и nвд с nвд1зад, nвд2зад, и если одновременно частота вращения nв превысит nв1зад и частота вращения nвд превысит nвд1зад или одновременно частота вращения nвд превысит наперед заданное предельное значение nвд2зад и частота вращения nв превысит наперед заданное предельное значение nв2зад, то с помощью автономного электронного блока защиты двигателя прекращают подачу топлива в камеру сгорания и выключают двигатель. Техническим результатом является повышение функциональной надежности и отказоустойчивости аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов при неуправляемом увеличении расхода топлива Gт в камеру сгорания двигателя, исключение ложных срабатываний автономного блока защиты двигателя. 3 з.п. ф-лы, 1 ил.
1. Способ аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов, заключающийся в том, что в электронном регуляторе двигателя с помощью датчиков электронного регулятора измеряют положение рычага управления двигателем и параметры двигателя, в зависимости от положения рычага управления двигателем и значения параметров двигателя по программам управления, реализованным в электронном регуляторе, формируют управляющие воздействия электронного регулятора и осуществляют управление двигателем, также в автономном электронном блоке защиты двигателя с помощью датчика измеряют частоту вращения nв ротора вентилятора двигателя, сравнивают частоту вращения nв ротора вентилятора с первым наперед заданным расчетным предельным значением nв1зад, отличающийся тем, что расчетным образом заранее определяют второе наперед заданное расчетное предельное значение nв2зад, а также первое предельное значение частоты вращения ротора высокого давления nвд1зад и второе предельное значение частоты вращения ротора высокого давления nвд2зад, дополнительно вводят предельные значения частоты nв2зад, nвд1зад, nвд2зад в автономный электронный блок защиты двигателя, также вводят в конструкцию двигателя датчик частоты вращения ротора высокого давления nвд, в автономном электронном блоке защиты двигателя с помощью датчика измеряют частоту вращения ротора высокого давления nвд, также дополнительно сравнивают nв с nв2зад и nвд с nвд1зад, nвд2зад, и если одновременно частота вращения nв превысит nв1зад и частота вращения nвд превысит nвд1зад или одновременно частота вращения nвд превысит наперед заданное предельное значение nвд2зад и частота вращения nв превысит наперед заданное предельное значение nв2зад, то с помощью автономного электронного блока защиты двигателя прекращают подачу топлива в камеру сгорания и выключают двигатель.
2. Способ аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов по п. 1, отличающийся тем, что параметр nв1зад>nв2зад, nвд2зад>nвд1зад.
3. Способ аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов по п. 1, отличающийся тем, что параметр nв1зад выбирают на 5…10% более максимально допустимого значения частоты вращения ротора вентилятора nв двигателя, но менее чем на 8…10% значения частоты вращения nв, при которой, в соответствии с нормами прочности, двигатель должен сохранять свою целостность (отсутствие фрагментов ротора вентилятора с высокой кинетической энергией); а параметр nвд1зад выбирают по результатам математического моделирования поведения nвд при раскрутке частоты вращения nв.
4. Способ аварийной защиты турбореактивного двухвального двухконтурного двигателя от раскрутки его роторов по п. 1, отличающийся тем, что параметр nвд2зад выбирают на 5…10% более максимально допустимого значения частоты вращения nвд двигателя, но менее чем на 8…10% значения частоты вращения ротора высокого давления nвд, при которой, в соответствии с нормами прочности, двигатель должен сохранять свою целостность (отсутствие фрагментов ротора высокого давления с высокой кинетической энергией); а параметр nв2зад выбирают по результатам математического моделирования поведения nв при раскрутке частоты вращения nвд.
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления | 2021 |
|
RU2778417C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Способ регулирования авиационного турбореактивного двигателя | 2019 |
|
RU2731824C1 |
| CA 3115485 A1, 29.10.2021 | |||
| US 2021332765 A1, 28.10.2021 | |||
| WO 2015092252 A1, 25.06.2015. | |||

