ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области медицины, а именно к травматологии и ортопедии, и предназначено для использования при восстановлении поврежденных и деформированных костей конечностей человека. В частности, настоящее изобретение относится к чрескостному аппарату, телескопической стойке для такого чрескостного аппарата, а также к компьютерной системе и способу для моделирования перемещения костного фрагмента или костных фрагментов с использованием такого чрескостного аппарата.
УРОВЕНЬ ТЕХНИКИ
В настоящее время известны т.н. гексаподы, представляющие собой компрессионно-дистракционные циркулярные чрескостные аппараты на основе встроенной компьютерной навигационной системы (компьютерной системы), которые используют в травматологии и ортопедии, в частности для репозиции костных фрагментов и коррекции деформации длинных костей. Известные гексаподы содержат основное опорное кольцо и подвижное опорное кольцо, которые фиксируют, посредством чрескостных элементов, спиц и/или стержней Шанца, соответственно основной костный фрагмент и подвижный костный фрагмент.Основное отличие таких гексаподов от других известных циркулярных чрескостных аппаратов заключается в том, что кольца соединены между собой шестью телескопическими стойками оригинальной конструкции, далее называемые стратами. Известная компьютерная система позволяет рассчитать перемещение костных фрагментов в пространстве, необходимое для коррекции деформации или репозиции перелома поврежденной кости. В результате расчета такая система выдает схему изменения длин страт, которая позволяет правильно расположить костные фрагменты [Paley D. History and Science Behind the Six-Axis Correction External Fixation Devices in Orthopaedic Surgery / D. Paley // Oper Tech Orthop.2011; 21:125-128].
Кроме того, в уровне техники известен чрескостный аппарат Тэйлора (Taylor Spatial Frame - TSF) [Keshet D., Eidelman M. Clinical utility of the Taylor spatial frame for limb deformities. Orthopedic Research and Reviews. 2017; 9:51-61], который имеет следующие недостатки:
- громоздкая и тяжелая конструкция в целом;
- карданные шарниры на концах страт имеют большой люфт, который часто становится причиной возникновения болевого синдрома;
- кольца и страты выполнены из металла (в частности, из рентген-позитивных материалов), что создает сложности в визуализации костных фрагментов на рентгенограммах и часто становится причиной неточной коррекции деформации;
- шкала страт аппарата Тэйлора подразумевает минимальное изменение длины, равное 1 мм, что является крайне большим «шагом» одномоментной дистракции и может негативно сказаться на свойствах дистракционного регенерата;
- опоры в чрескостном аппарате необходимо располагать перпендикулярно анатомической оси костных фрагментов, в противном же случае достаточно велика вероятность ошибки в расчетах репозиции;
- стандартные места фиксации страт к кольцам (т.н. «табам») ввиду отсутствия возможности изменений мест соединения страт и колец, что часто приводит к коллизии между чрескостными элементами и стратами, что в свою очередь требует повторного монтажа чрескостного аппарата. Это увеличивает срок лечения, а также делает его более трудозатратным для пациента;
- несовершенная навигационная система, предназначенная для определения пространственного положения костных фрагментов и кольцевых опор. В частности, необходимо выполнять рентгенограммы с центрированием луча на верхнюю опору, что искажает рентгенологическую картину кости, а также служит причиной неправильного определения вершины деформации и, следовательно, неправильной ее коррекции;
- навигационная система не обеспечивает возможность визуализации данных, а лишь позволяет пользователю вводить числовые характеристики в качестве входных данных для расчета. В частности, навигационной системе необходимы следующие параметры: расстояние от середины проксимального основного кольца до вершины деформации, т.н. офсеты, измеренные как по длине, так и по ширине в двух рентгенологических проекциях, а также угол деформации для двух проекций и смещение по ширине. Кроме того, навигационная система не позволяет выявлять возможные ошибки пользователя:
- при совершении пользователем ошибки ее можно определить только после осуществления коррекции с использованием контрольных рентгенограмм. Следует отметить, что такая пользовательская ошибка может оказать крайне негативное влияние на результат и/или ход лечения. В частности, неправильно отмеченное пользователем направление устранения деформации может привести к усугублению деформации, поскольку коррекция в таком случае будет осуществлена в направлении, противоположном требуемому направлению;
- после коррекции деформации согласно расчетам на контрольных рентгенограммах часто имеется остаточная деформация, в результате чего хирургу может потребоваться осуществить дополнительное перемещение костного фрагмента. В частности, навигационная система в чрескостном аппарате Тэйлора не обеспечивает возможность устранения остаточной деформации. Для осуществления каких-либо дополнительных перемещений костных фрагментов необходимо осуществить повторный расчет с использованием новых рентгенограмм, что является трудозатратным и времязатратным процессом;
- при выполнении сложного перемещения костных фрагментов, требующего многочисленных промежуточных положений перемещаемого костного фрагмента, например при застарелом переломе с захождением костных фрагментов по длине и ширине или контрактуре сустава, или вывихе в суставе, невозможно устранить остаточную деформацию с использованием результатов только одного расчета навигационной системы. В данном случае необходимо осуществить несколько перемещений костного фрагмента, при этом каждое последующее перемещение будет требовать получения новых рентгенограмм и, следовательно, нового расчета, что существенно увеличит трудозатраты врача и пациента, а также существенно увеличит лучевую нагрузку на пациента.
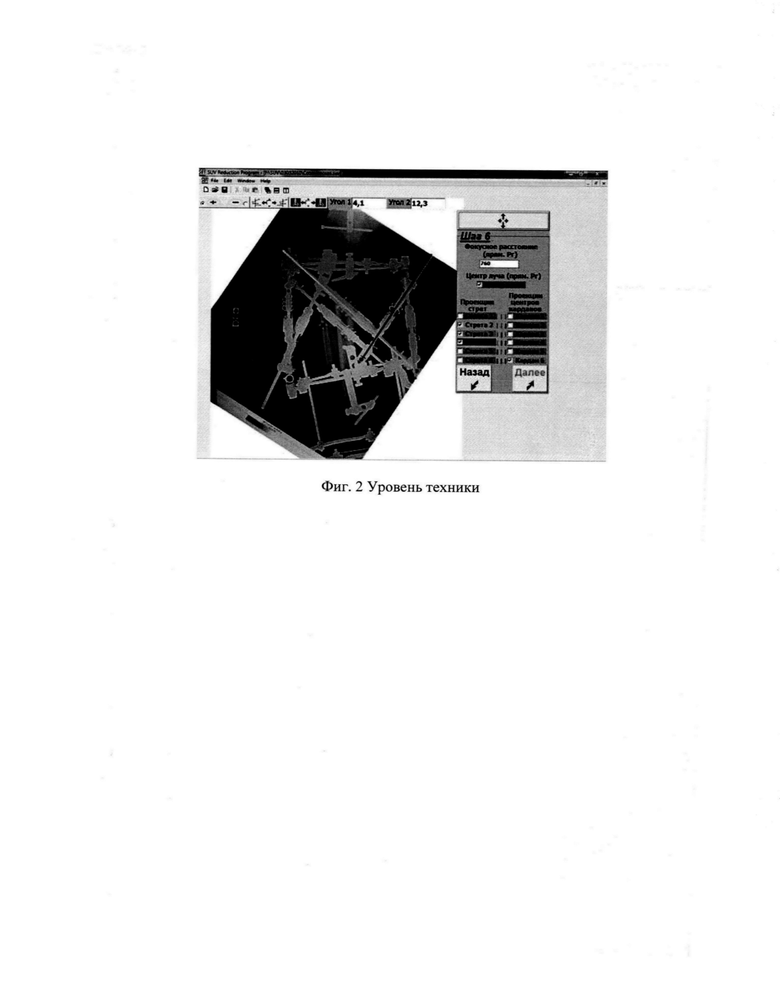
Кроме того, известен программно-аппаратный комплекс «Орто-СУВ», описанный в патенте РФ №105821 (А61В 17/00; опуб. 27.06.2011). В состав известного программно-аппаратного комплекса входит чрескостный аппарат (см. фиг. 1), относящийся к группе гексаподов, и компьютерная навигационная система, прилагаемая к этому известному чрескостному аппарату. Известный чрескостный аппарат состоит из основной кольцевой опоры 1 и подвижной кольцевой опоры 2, соединенных между собой телескопическими стойками 3, далее называемыми стратами в данном разделе настоящего документа. Каждая из страт 3 одним концом соединена посредством оси с соседней телескопической стойкой 3, а вторым своим концом соединена посредством шарнира кардана с соответствующей одной из кольцевых опор 1, 2. Таким образом, крепление страт 3 к кольцевым опорам 1, 2 осуществлено в трех местах на каждой из кольцевых опор 1, 2. Коррекцию деформации осуществляют путем изменения длин страт согласно расчетам, выполненным в компьютерной навигационной системе. Способ работы компьютерной навигационной системы состоит в следующем. В компьютерную навигационную систему заводят заранее измеренные цифровые значения длин страт и сторон треугольников, образованных карданами страт. В дальнейшем в компьютерной навигационной системе осуществляют загрузку рентгенограмм, их масштабирование, отмечают рентгенологическую проекцию страт и их карданов (см. фиг. 2).
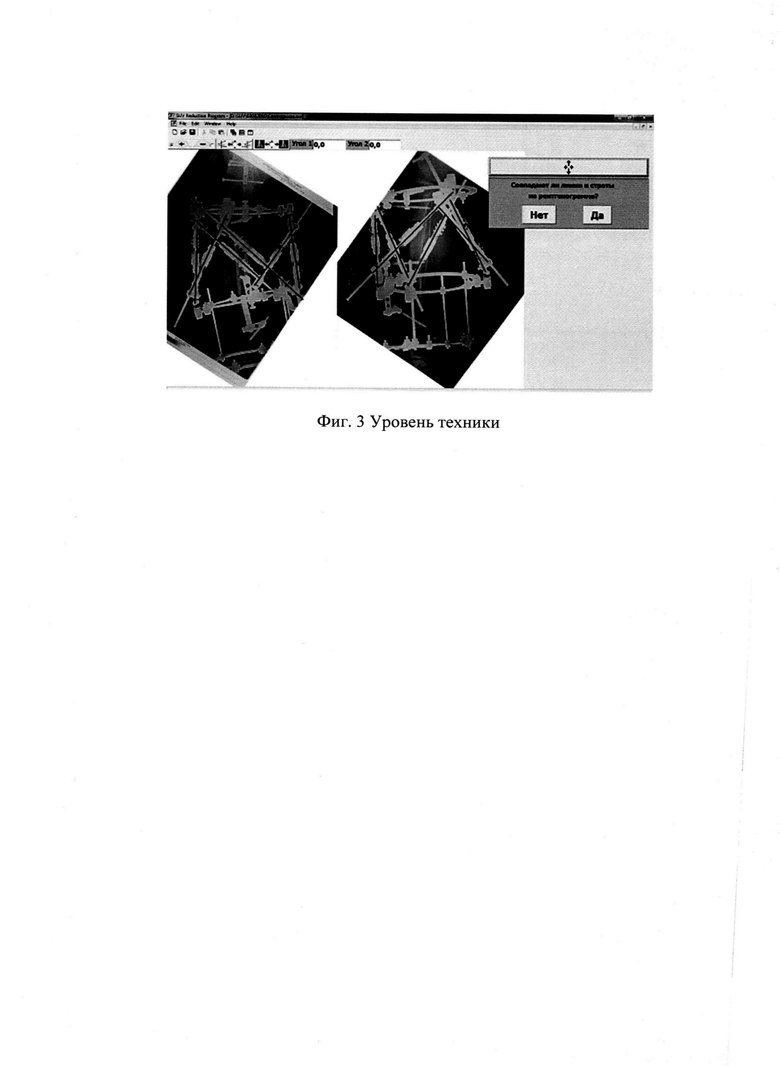
В результате компьютерная навигационная система осуществляет навигацию, т.е. создает трехмерную пространственную модель известного чрескостного аппарата в виде красных линий, что позволяет определить корректность исходных данных, введенных в компьютерную навигационную систему (см. фиг. 3).
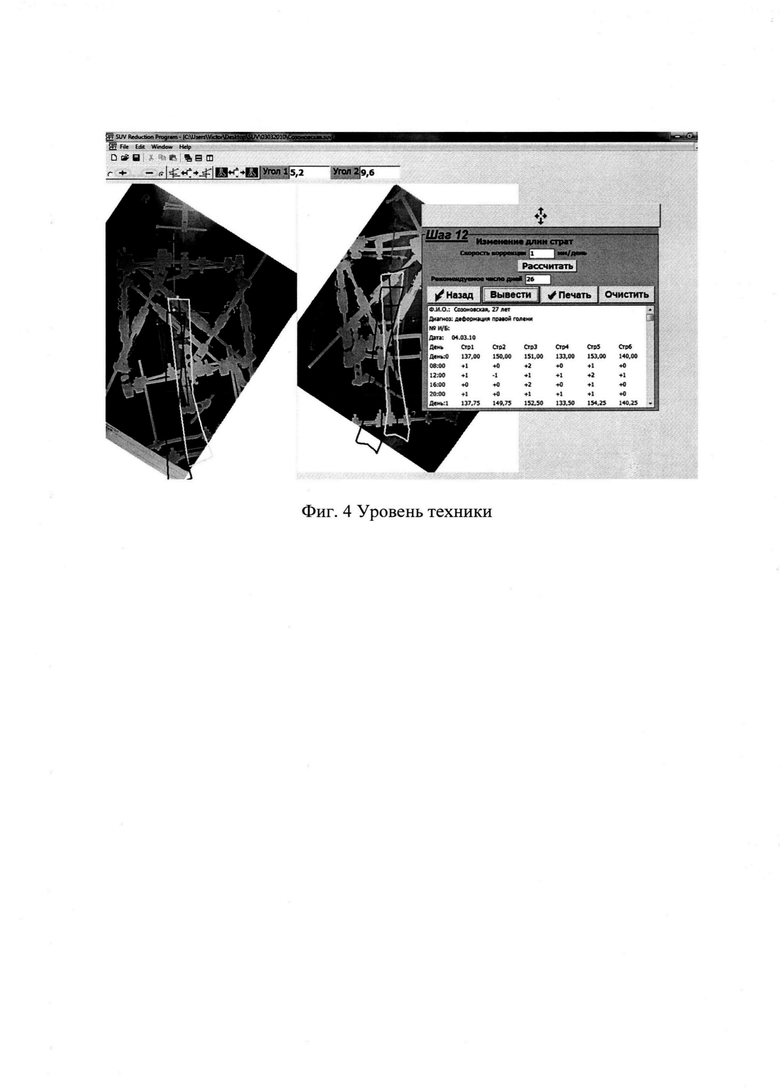
Кроме того, в компьютерной навигационной системе на рентгенограммах при помощи специальных инструментов выполняют построение осей костных фрагментов и обозначают контуры перемещаемого костного фрагмента. Кроме того, обозначают т.н. структуры риска, а именно, область регенерата, важные сосуды и нервы. В компьютерной навигационной системе также указывают необходимый темп дистракции. На основе внесенных данных известная компьютерная навигационная система выполняет расчет коррекции деформации путем виртуального объединения осей основного и перемещаемого костных фрагментов. В результате, известная компьютерная навигационная система визуализирует положение перемещаемого костного фрагмента, ожидаемое после коррекции деформации, в виде перемещенного контура, измененного в цвете (см. фиг. 4). Исходя из положения структур риска и темпа дистракции, введенного пользователем, известная компьютерная навигационная система рассчитывает количество дней, необходимых для коррекции и выдает предписание ежедневного изменения длин страт (см. фиг. 4). В дальнейшем следуя предписанию, осуществляют изменение длин страт, что позволяет получить коррекцию деформации.
Известный чрескостный аппарат имеет следующие недостатки:
- конструкция громоздка и тяжела;
- карданные шарниры на концах страт имеют большой люфт, который зачастую является причиной болевого синдрома;
- кольца и страты выполнены из металла (рентген-позитивных материалов), что создает сложности в визуализации костных фрагментов на рентгенограммах и может служить причиной неточной коррекции деформации;
- шкала страты не имеет цифровых значений, для определения шага изменения длины используют восемь тонких продольных линий на корпусе изменения длины страты и одну продольная линия на резьбе, относительно которой осуществляют вращение корпуса. Данная шкала неудобна для пациента, может служить причиной ошибок в ходе коррекции деформации;
- длительное время подготовки страты к режиму быстрой коррекции деформации и длительное время последующей фиксации страты.
Известная компьютерная навигационная система имеет следующие недостатки:
- для осуществления навигации необходимо выполнять маркировку страт и карданов. Визуализация их часто затруднена в связи с тем, что они «наслаиваются» на рентгенологическую проекцию колец и чрескостных элементов;
- после коррекции деформации согласно расчетам, на контрольных рентгенограммах зачастую имеет место остаточная деформация или хирургу необходимо осуществить дополнительное перемещение костного фрагмента. Кроме того, отсутствует опция устранения остаточной деформации. Для каких-либо дополнительных перемещений костных фрагментов необходимо выполнять повторный пересчет по свежим рентгенограммам, что является трудозатратным процессом;
- при необходимости выполнять сложное перемещение костных фрагментов, требующее множество промежуточных положений перемещаемого костного фрагмента, а именно, при застарелом переломе с захождением костных фрагментов по длине и ширине или контрактуре сустава, или вывихе в суставе, невозможно сделать это за один расчетный цикл работы компьютерной навигационной системы. Каждое последующее перемещение требует выполнения новых рентгенограмм и нового расчета, что повышает трудозатраты врача, увеличивает лучевую нагрузку на пациента.
Вышеописанные недостатки технических решений из уровня техники усложняют процесс лечения больного, являются причиной болевого синдрома, увеличивают сроки ношения устройства на восстанавливаемой конечности, снижая комфорт пациента и увеличивая сроки его лечения.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Вышеописанные недостатки известного чрескостного аппарата преодолены в следующих аспектах настоящего изобретения.
Первым аспектом настоящего изобретения является чрескостный аппарат, содержащий:
основную опору,
подвижную опору,
телескопические стойки, соединяющие между собой указанные опоры,
при этом по меньшей мере одна из телескопических стоек образована из
резьбового стержня,
внутренней втулки,
репозиционного узла, размещенного на внутренней втулке с возможностью поворота и состоящего из
наружной втулки, выполненной с возможностью поворота с обеспечением изменения длины указанной по меньшей мере одной телескопической стойки,
двух полувтулок, помещенных внутрь наружной втулки с обеспечением резьбового взаимодействия с резьбовым стержнем и обеспечением возможности ограниченного осевого перемещения наружной втулки по отношению к указанным полувтулкам,
резьбового стержня, соединенного посредством полувтулок с внутренней и наружной втулками таким образом, что он проходит внутри указанных втулок,
на резьбовой стержень нанесена шкала, соответствующая маркировке длины телескопической стойки,
на торцевых поверхностях полувтулок выполнены по меньшей мере два разноразмерных выступа,
при этом при повороте наружной втулки обеспечена возможность поворота указанных полувтулок относительно внутренней втулки с обеспечением их поворота и перемещения относительно резьбового стержня, что приводит к поочередному совмещению торцевых поверхностей разноразмерных выступов с одним из штрихов шкалы резьбового стержня.
Возможен вариант осуществления чрескостного аппарата, согласно которому указанная телескопическая стойка дополнительно содержит осевой элемент, который размещен во внутренней полости, образованной осевым отверстием резьбового стержня и осевым отверстием внутренней втулки, и на котором закреплены рентген-позитивные маркеры, при этом резьбовой стержень и внутренняя втулка выполнены из рентген-прозрачного материала.
Возможен вариант осуществления чрескостного аппарата, согласно которому каждый из концов указанной телескопической стойки шарнирно соединен с соответствующим резьбовым штырем, выполненным с возможностью резьбового соединения с соответствующей одной из указанных кольцевых опор.
Возможен вариант осуществления чрескостного аппарата, согласно которому расстояние между сторонами резьбового профиля резьбы резьбового стержня измеренное на уровне наружного диаметра резьбы резьбового стержня в осевом направлении по меньшей мере на десять процентов больше, чем расстояние между сторонами резьбового профиля резьбы репозиционного узла, измеренное в осевом направлении на уровне наружного диаметра резьбы резьбового стержня.
Возможен вариант осуществления чрескостного аппарата, согласно которому указанные опоры и указанная телескопическая стойка выполнены из рентген-прозрачного материала.
Другим аспектом настоящего изобретения является телескопическая стойка для чрескостного аппарата, дополнительно включающая осевой элемент, который размещен во внутренней полости, образованной осевым отверстием резьбового стержня и осевым отверстием внутренней втулки, и на котором закреплены рентген-позитивные маркеры, при этом резьбовой стержень и внутренняя втулка выполнены из рентген-прозрачного материала.
Возможен вариант осуществления телескопической стойки, согласно которому рентген-позитивные маркеры представляют собой сферические и/или цилиндрические элементы, скрепленные нитью, протянутой сквозь осевые отверстия, выполненные в резьбовом стержне и внутренней втулке.
Предложенный чрескостный аппарат обеспечивает технический результат, заключающийся в повышении точности задания длины телескопических стоек при его использовании,
Предложенная телескопическая стойка для чрескостного аппарата обеспечивает технический результат, заключающийся, в частности, в возможности упрощения визуализации костных фрагментов на рентгенограммах.
Еще одним аспектом настоящего изобретения является способ моделирования перемещения костного фрагмента, выполняемый на процессорном устройстве, при этом указанный способ включает в себя следующие этапы:
получение по меньшей мере двух масштабируемых цифровых рентгенограмм по меньшей мере двух костных фрагментов, предварительно зафиксированных в исходном положении посредством чрескостного аппарата, причем по меньшей мере две масштабируемые цифровые рентгенограммы выполнены по меньшей мере в двух проекциях;
получение параметров положения элементов чрескостного аппарата относительно указанных по меньшей мере двух костных фрагментов;
построение осей указанных по меньшей мере двух костных фрагментов на полученных по меньшей мере двух рентгенограммах,
осуществление маркировки телескопических стоек чрескостного аппарата путем указания рентген-позитивных маркеров на полученных по меньшей мере двух рентгенограммах с обеспечением построения трехмерной модели упомянутого чрескостного аппарата;
задание первого целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов относительно другого костного фрагмента;
моделирование последовательных изменений указанных полученных параметров положения элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента из исходного положения в заданное первое целевое положение;
задание по меньшей мере одного дополнительного целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов; и
моделирование последовательного изменения параметров элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента из исходного положения или первого целевого положения в заданное по меньшей мере одно дополнительное целевое положение или из исходного положения в дополнительное целевое положение и из дополнительного целевого положения в первое целевое положение.
Возможен вариант осуществления способа, согласно которому получаемые параметры положения элементов чрескостного аппарата относительно указанных по меньшей мере двух костных фрагментов, определяют с использованием рентген-позитивных маркеров, закрепленных на осевом элементе телескопической стойки, размещенном во внутренней полости, образованной осевым отверстием резьбового стержня и осевым отверстием внутренней втулки.
Возможен вариант осуществления способа, согласно которому при определении параметров положения элементов чрескостного аппарата относительно указанных по меньшей мере двух костных фрагментов, определяют длины телескопических стоек и места соединения телескопических стоек с основной и подвижной опорами.
Возможен вариант осуществления способа, согласно которому дополнительно определяют корректность указанных параметров по совпадению проекций построенной трехмерной модели чрескостного аппарата и рентгенологических проекциях телескопических стоек чрескостного аппарата на полученных масштабируемых цифровых рентгенограммах.
Возможен вариант осуществления способа, согласно которому моделированием программы последовательного изменения параметров элементов чрескостного аппарата перемещения по меньшей мере одного костного фрагмента осуществляют с учетом предварительно заданного или автоматически определенного временного отрезка на осуществление перемещения.
Возможен вариант осуществления способа, согласно которому программа последовательного изменения параметров элементов чрескостного аппарата включает по меньшей мере последовательность изменений длин телескопических стоек чрескостного аппарата на протяжении заданного или автоматически определенного временного отрезка.
Возможен вариант осуществления способа, согласно которому при определении первого целевого положения или по меньшей мере одного дополнительного целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов относительно другого костного фрагмента проверяют возможность заданного перемещения указанного по меньшей мере одного костного фрагмента путем сравнения параметров построенной трехмерной модели чрескостного аппарата с интервалами их допустимых значений.
Возможен вариант осуществления способа, согласно которому дополнительное целевое положение представляет собой серию из двух и более последовательных дополнительных целевых положений, причем осуществляют моделирование последовательного изменения параметров элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента:
либо из исходного положения в первое дополнительное положение из серии последовательных дополнительных положений, затем последовательное перемещение, включающее перемещения между дополнительными положениями из серии последовательных дополнительных положений, от первого дополнительного положения в крайнее дополнительное положение из серии последовательных дополнительных положений, затем перемещение от крайнего дополнительного положения из серии дополнительных положений в заданное по меньшей мере одно первое целевое положение;
либо из исходного положения в первое по меньшей мере одно первое целевое положение, затем из первого целевого положения в первое дополнительное положение из серии последовательных дополнительных положений, затем последовательное перемещение, включающее перемещения между дополнительными положениями из серии последовательных дополнительных положений, от первого дополнительного положения в крайнее дополнительное положение из серии последовательных дополнительных положений с образованием второго целевого положения.
Еще одним аспектом настоящего изобретения является компьютерная система для моделирования перемещения костного фрагмента (далее компьютерная система или компьютерная навигационная система), содержащая процессорное устройство, выполненное с возможностью осуществления операций заявляемого способа моделирования перемещения костного фрагмента.
Как будет понятно специалисту, под термином «по меньшей мере одно дополнительное целевое положение» понимается одно или несколько дополнительных целевых положений. В частности, при необходимости может быть задано второе, третье, четвертое,...и т.д. дополнительное целевое положение. В известном уровне техники подразумевается только создание одного первого целевого положения. Для корректировки или дополнения программы в известном уровне техники необходимо сделать новую рентгенограмму, заново построить оси и т.д.
Предложенные способ и компьютерная система для моделирования перемещения костного фрагмента обеспечивают технический результат, заключающийся в повышении точности и эффективности коррекции деформации костных фрагментов, в частности за счет обеспечения возможности точной визуализации телескопических стоек на рентгенограммах, что повышает точность навигации.
Предложенные способ и компьютерная система для моделирования перемещения костного фрагмента обеспечивают каждый дополнительный технический результат, заключающийся в повышении качества коррекции деформации костных фрагментов, в особенности в случае смещения костных фрагментов по длине и ширине и/или в случае лечения контрактур крупных суставов, в частности за счет обеспечения возможности виртуального планирования и реализации множественных промежуточных положений и окончательного положения перемещаемого костного фрагмента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 показан внешний вид известного чрескостного аппарата «Орто-СУВ», входящего в состав известного программно-аппаратного комплекса «Орто-СУВ», при этом приведены следующие ссылочные обозначения: 1.1 - основное опорное кольцо;
1.2 - подвижное опорное кольцо;
1.3 - телескопические стойки.
На фиг. 2 показана одна из функциональных возможностей или функциональных инструментов известной компьютерной навигационной системы, дополняющей чрескостный аппарат «Орто-СУВ», показанный на фиг. 1, и также входящей в состав известного программно-аппаратного комплекса «Орто-СУВ». Как показано на фиг. 2, на шаге №6 выполнена маркировка телескопических стоек №№2, 3 и 4, а также маркировка кардана телескопической стойки №6.
На фиг. 3 показана еще одна функциональная возможность или функциональный инструмент известной компьютерной навигационной системы, дополняющей чрескостный аппарат «Орто-СУВ», показанный на фиг. 1, и входящей в состав известного программно-аппаратного комплекса «Орто-СУВ». Как показано на фиг. 3, после шага №7 осуществлена навигация, при этом соответствие красных линий рентгенологической проекции телескопических стоек свидетельствует о корректности введенных данных.
На фиг. 4 показана еще одна функциональная возможность или функциональный инструмент известной компьютерной навигационной системы, дополняющей чрескостный аппарат «Орто-СУВ», показанный на фиг. 1, и входящей в состав известного программно-аппаратного комплекса «Орто-СУВ». Как показано на фиг. 4, на шаге №12 на основе построенных осей костных фрагментов осуществлены расчет и визуализация коррекции деформации, при этом желтый контур представляет положение перемещаемого костного фрагмента до коррекции (исходное положение), красный контур представляет ожидаемое положение перемещаемого костного фрагмента после коррекции деформации, а белое поле представляет схему ежедневного изменения длин телескопических стоек.
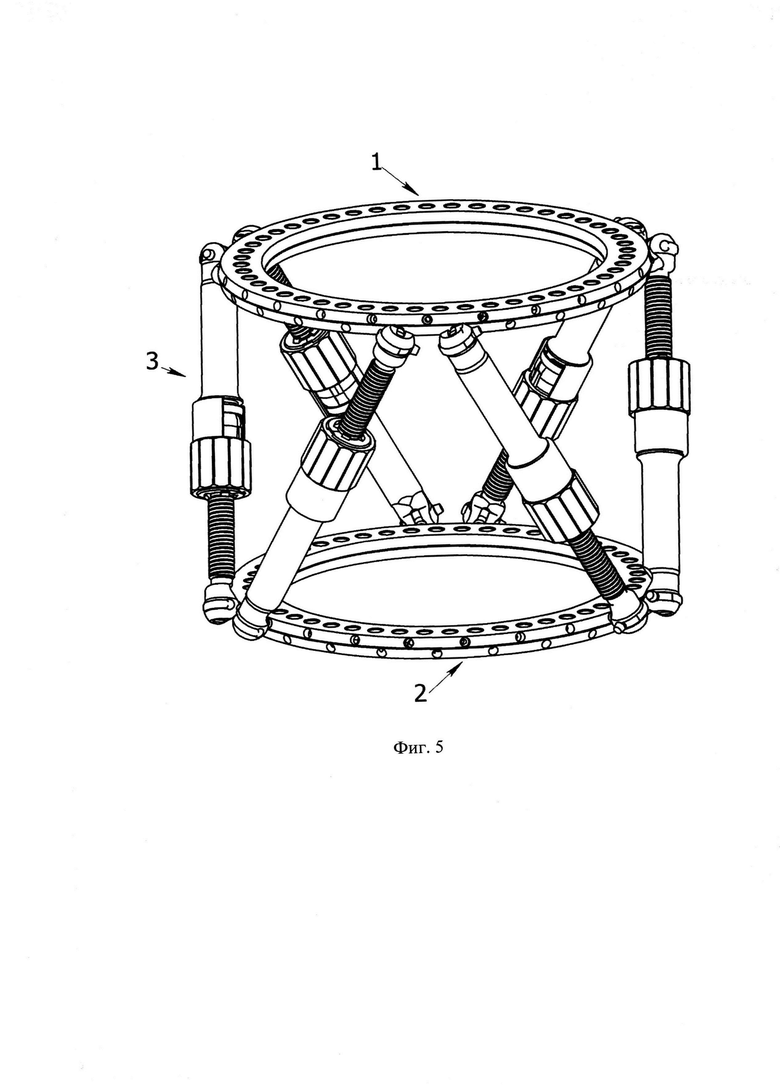
На фиг. 5 показан внешний вид чрескостного аппарата согласно неограничивающему варианту осуществления настоящего изобретения, при этом приведены следующие ссылочные обозначения:
1 - основное опорное кольцо;
2 - подвижное опорное кольцо;
3 - телескопические стойки.
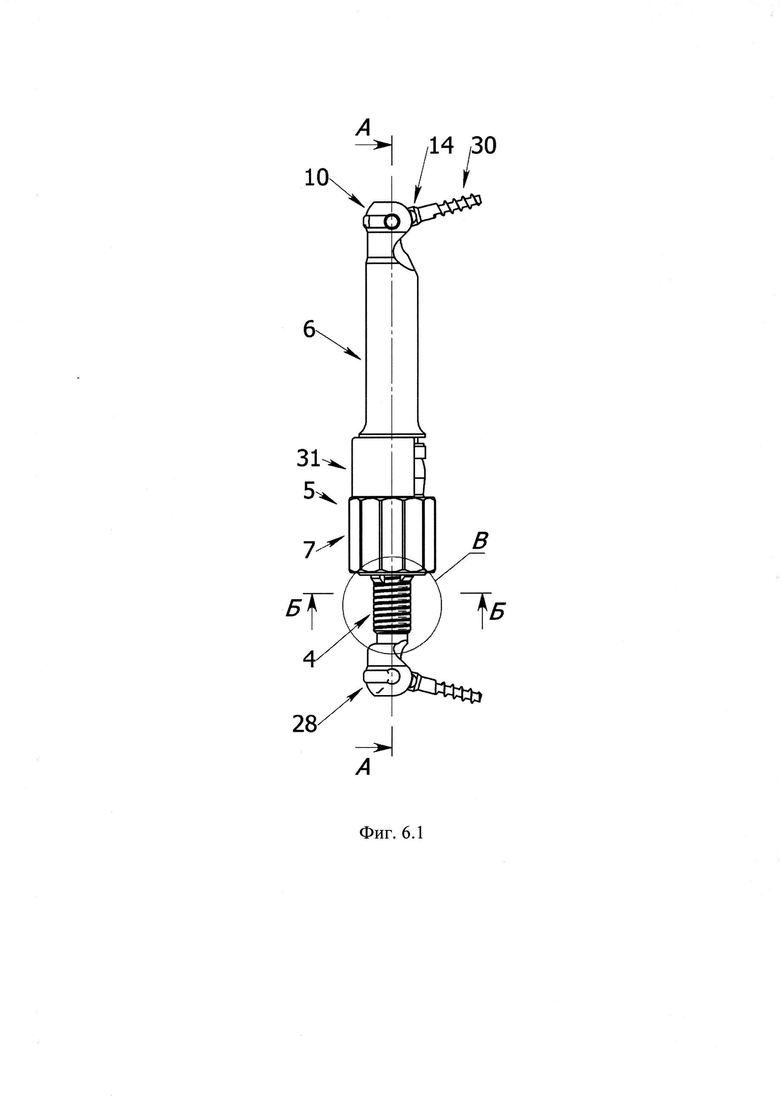
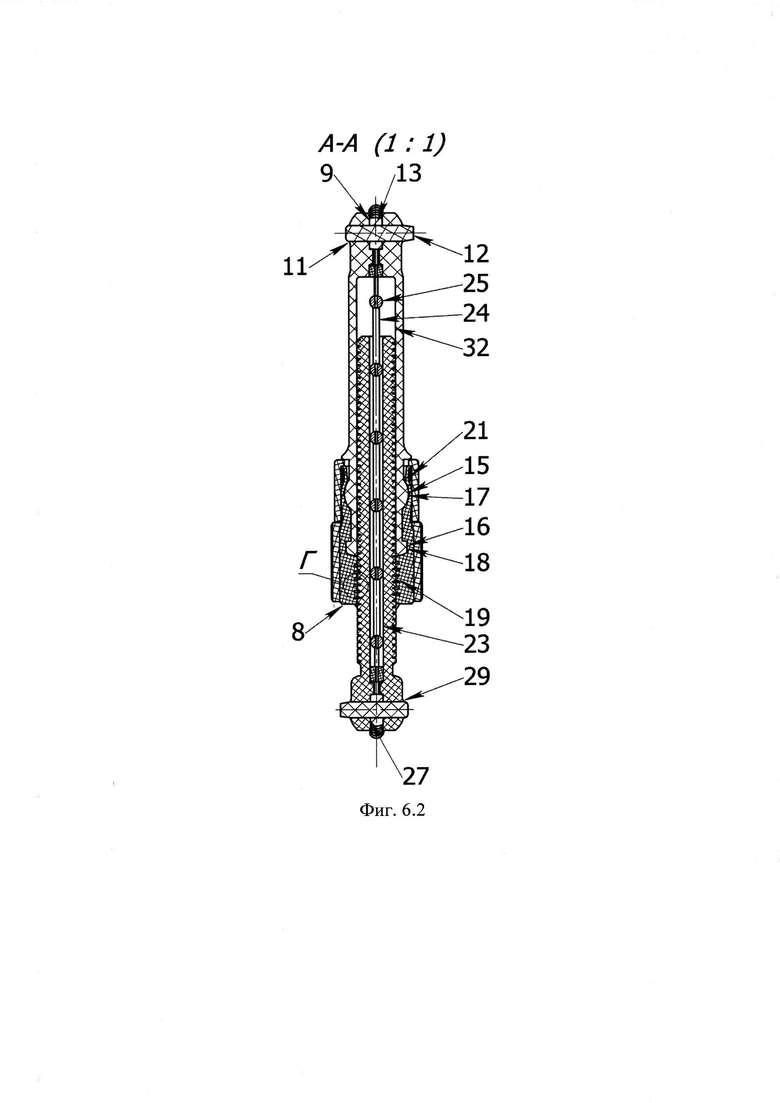
На фиг. 6.1-6.5 показана телескопическая стойка для чрескостного аппарата согласно неограничивающему варианту осуществления настоящего изобретения, при этом использованы следующие ссылочные обозначения:
4 - резьбовой стержень;
5 - репозиционный узел;
6 - внутренняя втулка;
7 - наружная втулка;
8 - резьбовая полувтулка;
9 - паз;
10 - проточка;
11 - отверстие;
12 - ось;
13 - проушина;
14 - резьбовой штырь;
15 - кольцевой радиальный выступ;
16 - торцевой радиальный выступ;
17 - кольцевая радиальная проточка;
18 - торцевая радиальная проточка;
19 - резьба полувтулки;
20 - угловая выборка;
21 - кольцевой упругий элемент;
22 - разноразмерные выступы;
23 - осевое отверстие резьбового стержня;
24 - осевой элемент;
25 - рентген-позитивные маркеры;
26 - маркировка длины телескопической стойки;
27 - паз;
28 - проточка;
29 - отверстие;
30 - наружная резьба;
31 - блокирующая скоба;
32 -осевое отверстие внутренней втулки;
33 - торцевые поверхности разноразмерных выступов
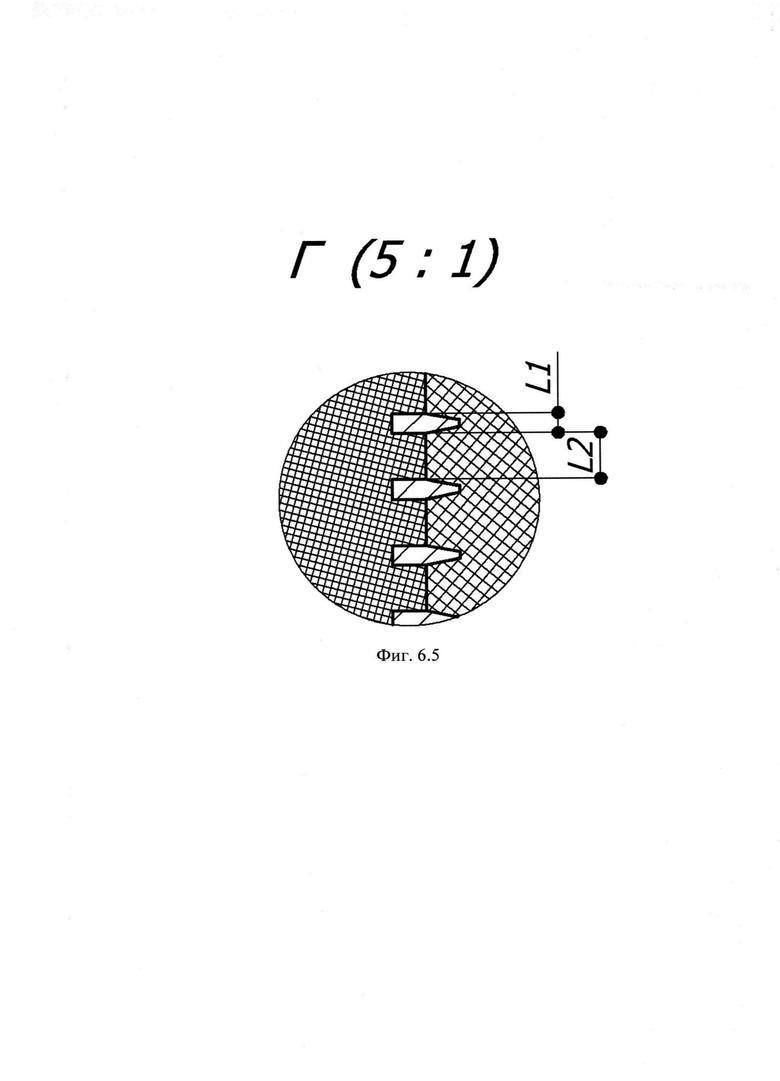
L1 (фиг. 6.5) - расстояние между сторонами резьбового профиля резьбы репозиционного узла, измеренное в осевом направлении на уровне наружного диаметра резьбы резьбового стержня;
L2 (фиг. 6.5) - расстояние между сторонами резьбового профиля резьбы резьбового стержня, измеренное на уровне наружного диаметра резьбы резьбового стержня в осевом направлении.
На фиг. 7 показан один из вариантов реализации кольцевых опор для чрескостного аппарата согласно настоящему изобретению, при этом использованы следующие ссылочные обозначения: 34 - резьбовое отверстие.
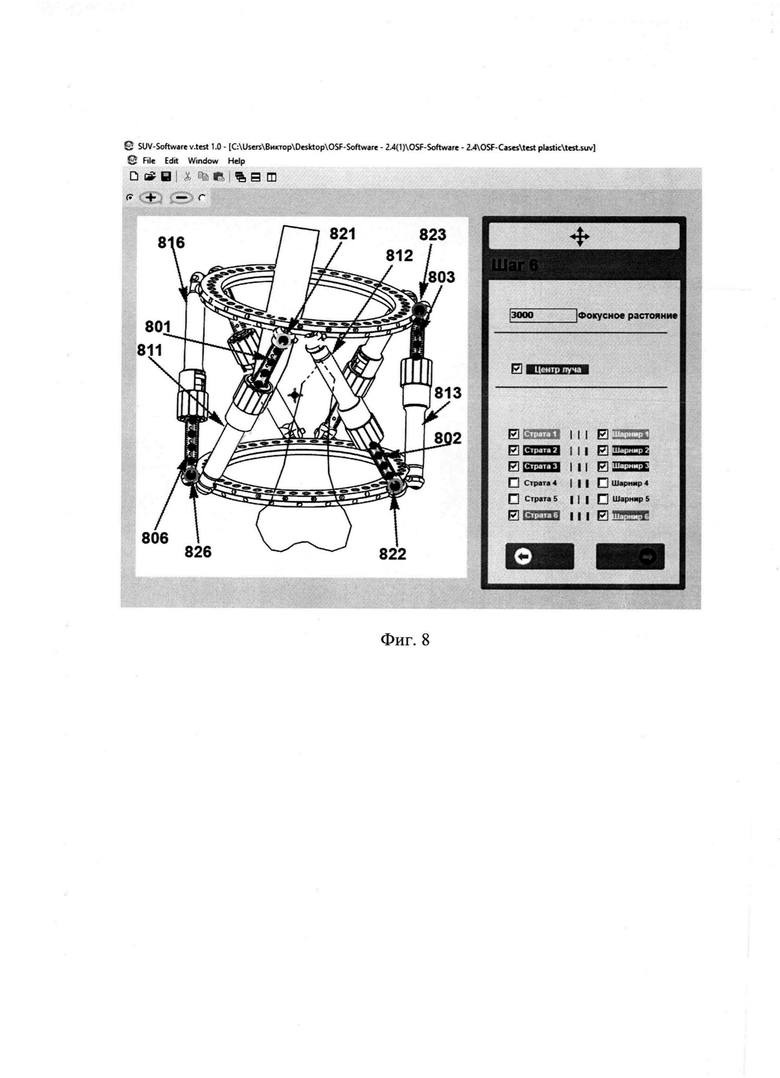
На фиг. 8 показаны одна из функциональных возможностей или один из функциональных инструментов компьютерной навигационной системы согласно настоящему изобретению, в частности показана функциональная возможность, соответствующая шагу 7: отмечены рентген-позитивные маркеры 801, 802, 803 и 806 телескопических стоек 811, 812, 813, 816 соответственно. Шарниры 821, 822, 823, 826, соответствующих телескопических стоек 811, 812, 813, 816, автоматически определены компьютерной навигационной системой согласно настоящему изобретению.
На фиг. 9 показан результат выполнения функциональной возможности компьютерной навигационной системы, соответствующий состоянию после шага №7 - компьютерная навигационная система выполнила навигацию. Соответствие красных линий 901,902, 903,904,905, 906 рентгенологической проекции соответствующих телескопических стоек 811, 812, 813, 814, 815, 816 свидетельствует о корректности введенных данных.
На фиг. 10 показаны еще одна функциональная возможность или еще один функциональный инструмент компьютерной навигационной системы согласно настоящему изобретению, в частности функциональная возможность, соответствующая шагу 11. Желтый контур (1002) - исходное положение перемещаемого костного фрагмента, красный (1004) -ожидаемое положение перемещаемого фрагмента после коррекции деформации. В данном неограничивающем примере запланировано плоскопараллельное перемещение дистального фрагмента по длине (дистракция 10 мм) для того, чтобы избежать коллизии костных фрагментов при коррекции деформации. Перемещение дистального костного фрагмента осуществляется относительно оси (1006) проксимального костного фрагмента.
На фиг. 11 показаны еще одна функциональная возможность или еще один функциональный инструмент компьютерной навигационной системы согласно настоящему изобретению, в частности функциональная возможность, соответствующая шагу 13. Компьютерная навигационная система посчитала заданное плоскопараллельное перемещение дистального фрагмента по длине. В результате компьютерная навигационная система выдает схему (предписание) 1102 ежедневного изменения длин телескопических стоек 811, 812, 813, 814, 815, 816, требуемого для обеспечения заданной коррекции.
На фиг. 12 показаны еще одна функциональная возможность или еще один функциональный инструмент компьютерной навигационной системы согласно настоящему изобретению, в частности функциональная возможность, соответствующая шагу 14: нажатие кнопки "Intermediate position"(промежуточное положение) 1202 (указано стрелкой) позволяет зафиксировать достигнутое положение контура.
На фиг. 13 показано дополнительное перемещение контура дистального фрагмента. Желтый контур (1002) - исходное (начальное) положение дистального костного фрагмента, синий контур (1302) - зафиксированное дополнительное целевое (промежуточное) положение, а красный контур (1004) - ожидаемое в результате дополнительного перемещения первое целевое положение дистального костного фрагмента.
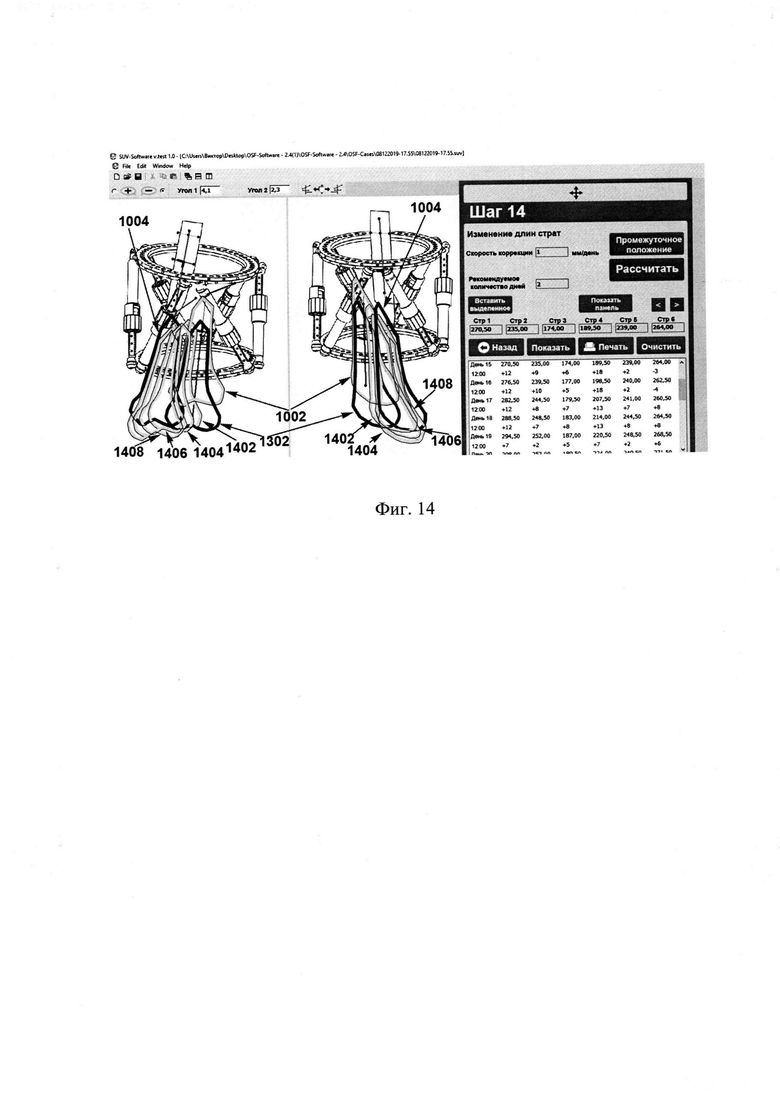
На фиг. 14 показаны множественные последовательные перемещения контура дистального костного фрагмента. Желтый контур (1002) - исходное положение дистального костного фрагмента, синий контур (1302) - зафиксированное дополнительное целевое (промежуточное) положение, серые контуры (1402, 1404, 1406, 1408) - серию последовательных дополнительных целевых положений дистального костного фрагмента, а красный контур (1004) - ожидаемое в результате дополнительных перемещений целевое положение дистального костного фрагмента.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1-4 показаны известный чрескостный аппарат «Орто-СУВ» и дополняющая его известная навигационная система, входящие в состав известного программно-аппаратного комплекса «Орто-СУВ».
На фиг. 5 показан чрескостный аппарат согласно настоящему изобретению, конструкция которого содержит основную кольцевую опору 1, и подвижную кольцевую опору 2, а также систему телескопических стоек, образованную из шести телескопических стоек 3 (также называются в уровне техники стратами), соединяющих между собой кольцевые опоры 1, 2, при этом кольцевые опоры 1, 2 и телескопические стойки 33 выполнены из рентген-прозрачного материала, например из пластика.
На фиг. 6 показан один из вариантов реализации телескопической стойки 3. Телескопическая стойка 3, показанная на фиг. 6, образована из резьбового стержня 4, внутренней втулки 6 и репозиционного узла 5, помещенного с возможностью поворота на внутренней втулке 6. Репозиционный узел 5 состоит из наружной втулки 7, двух полувтулок 8, помещенных внутрь наружной втулки 7 с обеспечением резьбового соединения или резьбового взаимодействия с резьбовым стержнем 4 и обеспечением возможности ограниченного осевого перемещения наружной втулки 7 по отношению к указанным полувтулкам 8, при этом указанные полувтулки 8 дополнительно связаны между собой посредством кольцевого упругого элемента 21. Кроме того, в состав репозиционного узла 5 также входит блокирующая скоба 31.
В одном из вариантов реализации настоящего изобретения расстояние между сторонами резьбового профиля резьбы резьбового стержня 4, измеренное на уровне наружного диаметра резьбы резьбового стержня 4 в осевом направлении, может быть по меньшей мере на 10 процентов больше, чем расстояние между сторонами резьбового профиля резьбы репозиционного узла 5, измеренное в осевом направлении на уровне наружного диаметра резьбы резьбового стержня 4.
Внутренняя втулка 6 на одном из своих концов имеет паз 9, проточку 10 и отверстие 11 для соединения с осью 12, посредством которой телескопическая стойка 3 соединена с проушиной 13 резьбового штыря 14 с образованием шарнира для обеспечения шарнирного соединения между соответствующим одним из концов телескопической стойки 3, в частности первым концом телескопической стойки 3, и соответствующим резьбовым штырем 14, как показано на фиг. 6.
На другом конце внутренняя втулка 6 имеет кольцевой радиальный выступ 15 и торцевой радиальный выступ 16, которые обращены к полувтулкам 8, имеющим на своей внутренней поверхности соответствующие кольцевую радиальную проточку 17 и торцевую радиальную проточку 18, при этом на ограниченном участке внутренней поверхности резьбовые полувтулки 8 имеют резьбу 19, на внешней поверхности резьбовые полувтулки 8 имеют две угловые выборки 20, на внешней поверхности основания резьбовых полувтулок 8 расположен кольцевой упругий элемент 21, на торцевом конце каждая из полувтулок 8 имеет по меньшей мере по два разноразмерных выступа 22, расположенных под углом друг к другу (например, под углом 90 градусов). Резьбовой стержень 4 проходит внутри репозиционного узла 5 и внутренней втулки 6 и имеет осевое отверстие 23. По центральной оси телескопическая стойка 3 содержит осевой элемент 24, который размещен во внутренней полости, образованной осевым отверстием 23 резьбового стержня и осевым отверстием 32 внутренней втулки, и на котором закреплены рентген-позитивные маркеры 25, при этом резьбовой стержень 4 и внутренняя втулка 6 выполнены каждый из рентген-прозрачного материала, например из пластика. Рентген-позитивные маркеры 25 представляют собой, например, сферические и/или цилиндрические элементы, скрепленные с осевым элементом представляющим собой резинку или нить, протянутую сквозь осевое отверстие 23 резьбового стержня и осевое отверстием 32 внутренней втулки. Следует отметить, что при увеличении длины телескопической стойки 3, при данной реализации изобретения, происходит соответствующее увеличение расстояния между рентген-позитивными маркерами 25.
Резьбовой стержень 4 соединен посредством полувтулок 8 с внутренней втулкой 6 и наружной втулкой 7. На наружной резьбе резьбового стержня 4 нанесена шкала 26, соответствующая маркировке длины телескопической стойки 3, при этом каждая нанесенная метка в виде штриха соответствует заданному шагу изменения длины телескопической стойки 3, что в конечном итоге позволяет пользователю точно определить длину телескопической стойки 3. Резьбовой стержень 4 на одном из своих концов имеет паз 27, проточку 28 и отверстие 29 для соединения с осью 12, посредством которых телескопическая стойка 3 соединена с проушиной 13 резьбового штыря 14 с образованием шарнира для обеспечения шарнирного соединения между соответствующим другим концом телескопической стойки 3, в частности вторым концом телескопической стойки 3, противоположном ее вышеописанному первому концу, и соответствующим резьбовым штырем 14, как показано на фиг. 6.
Резьбовые штыри 14, шарнирно соединенные каждый с соответствующим одним из двух противоположных концов телескопической стойки 3, снабжены каждый наружной резьбой 30, как показано на фиг. 6.
Как показано на фиг. 7, кольцевые опоры 1, 2 на своей наружной поверхности снабжены каждая резьбовыми отверстиями 34, выполненными под углом к плоскости соответствующей кольцевой опоры и предназначенными для вставки или ввинчивания в них резьбовых штырей 14 соответствующей телескопической стойки 3, в результате чего телескопические стойки 3 оказываются соединенными каждая посредством резьбовых штырей 14 с обеими кольцевыми опорами 1,2.
Компьютерная система для моделирования перемещения костного фрагмента согласно настоящему изобретению, используется в дополнение к вышеописанному чрескостному аппарату согласно настоящему изобретению.
Компьютерная система для моделирования перемещения костного фрагмента согласно настоящему изобретению по существу представляет собой программно-аппаратный комплекс, который может быть реализован в виде компьютера общего назначения, имеющего описанную ниже структуру, хорошо известную специалистам в данной области техники.
В частности, компьютер общего назначения обычно содержит центральный процессор, системную память и системную шину, которая в свою очередь содержит разные системные компоненты, в том числе память, связанную с центральным процессором. Системная шина в таком компьютере общего назначения содержит шину памяти и контроллер шины памяти, периферийную шину и локальную шину, выполненную с возможностью взаимодействия с любой другой шинной архитектурой. Системная память содержит постоянное запоминающее устройство (ПЗУ) и память с произвольным доступом (ОЗУ). Основная система ввода/вывода (BIOS) содержит основные процедуры, которые обеспечивают передачу информации между элементами такого компьютера общего назначения, например в момент загрузки операционной системы с использованием ПЗУ. Кроме того, компьютер общего назначения содержит жесткий диск для чтения и записи данных, привод магнитных дисков для чтения и записи на сменные магнитные диски и оптический привод для чтения и записи на сменные оптические диски, такие как CD-ROM, DVD-ROM и иные оптические носители информации, однако могут быть использованы компьютерные носители иных типов, выполненные с возможностью хранения данных в машиночитаемой форме, например твердотельные накопители, флеш-карты, цифровые диски и т.п., и подключенные к системной шине через контроллер. В компьютере общего назначения жесткий диск, привод магнитных дисков и оптический привод соединены соответственно с системной шиной через интерфейс жесткого диска, интерфейс магнитных дисков и интерфейс оптического привода. Приводы и соответствующие компьютерные носители информации представляют собой энергонезависимые средства хранения компьютерных инструкций, структур данных, программных модулей и прочих данных компьютера общего назначения. Компьютер общего назначения имеет файловую систему, в которой хранится записанная операционная система, а также дополнительные программные приложения, прочие программные модули и данные программ. Пользователь имеет возможность вводить команды и информацию в компьютер общего назначения с использованием известных устройств ввода, например клавиатуры, манипулятора типа «мышь», микрофона, джойстика, игровой консоли, сканера и т.п., при этом эти устройства ввода обычно подключают доступ к компьютеру общего назначения через последовательный порт, который в свою очередь подсоединен к системной шине, однако они могут быть подключены и иным способом, например с помощью параллельного порта, игрового порта или универсальной последовательной шины (USB). Монитор или иной тип устройства отображения, например жидкокристаллический дисплей, также подсоединен к системной шине через интерфейс, такой как видеоадаптер. В дополнение к монитору персональный компьютер может быть снабжен другими периферийными устройствами вывода, например колонками, принтером и т.п. Компьютер общего назначения способен работать в сетевом окружении, при этом для соединения с одним или несколькими удаленными компьютерами может быть использовано сетевое соединение. Сетевые соединения могут образовывать локальную вычислительную сеть (LAN) и глобальную вычислительную сеть (WAN). Такие сети обычно применяют в корпоративных компьютерных сетях и внутренних сетях компаний, при этом они имеют доступ к сети Интернет. В LAN-сетях или WAN-сетях компьютер общего назначения подключают к локальной сети через сетевой адаптер или сетевой интерфейс. При использовании сетей компьютер общего назначения может использовать модем, сетевую карту, адаптер или иные средства обеспечения связи с глобальной вычислительной сетью, такой как сеть Интернет, при этом эти средства связи подключают к системной шине посредством последовательного порта. Следует отметить, что в ПЗУ компьютера общего назначения или по меньшей мере на любом одном из вышеописанных машиночитаемых носителей, которые могут быть использованы в компьютере общего назначения, могут быть сохранены машиночитаемые инструкции, к которым может иметь доступ центральный процессор этого компьютера общего назначения, при этом выполнение этих машиночитаемых инструкций на компьютере общего назначения может вызывать исполнение его центральным процессором различных процедур или операций, описанных ниже в данном документе.
В одном из вариантов реализации настоящего изобретения компьютерная система для моделирования перемещения костного фрагмента (компьютерная навигационная система) согласно настоящему изобретению может быть выполнена в виде одиночного компьютерного сервера, например сервера «Dell™ PowerEdge™», использующего операционную систему «Ubuntu Server 18.04». Кроме того, в иных вариантах реализации настоящего изобретения компьютерная система для моделирования перемещения костного фрагмента согласно настоящему изобретению может быть выполнена в виде настольного персонального компьютера, ноутбука, нетбука, смартфона, планшета и иного электронно-вычислительного устройства, подходящего для решения поставленных задач.
В других вариантах реализации компьютерная навигационная система согласно настоящему изобретению может быть выполнена в виде любой другой совокупности аппаратных средств, программного обеспечения или программно-аппаратного комплекса, подходящих для решения поставленных задач.
Таким образом, в предпочтительном варианте реализации настоящего изобретения Компьютерная система для моделирования перемещения костного фрагмента согласно настоящему изобретению включает в себя, помимо прочего, запоминающее устройство, например машиночитаемый носитель данных, на котором могут быть предварительно сохранены необходимые машиночитаемые инструкции и/или базы данных, дисплей или дисплейное устройство, например сенсорный дисплей, иные средства ввода-вывода данных, такие как клавиатура, компьютерная мышь и т.п., а также процессор или процессорное устройство, выполненное с возможностью выполнения различных процедур, в том числе нижеописанных процедур. Для выполнения необходимых процедур компьютерное устройство компьютерной навигационной системы согласно настоящему изобретению получает доступ к машиночитаемым инструкциям, хранящимся на запоминающем устройстве для их последующего выполнения, что инициирует реализацию этим процессорным устройством различных процедур, в том числе нижеописанных процедур.
В качестве альтернативы или дополнения компьютерная навигационная система согласно настоящему изобретению может иметь доступ к необходимым машиночитаемым инструкциям и/или базам данных, расположенных на ином оборудовании, при этом то, как именно реализован доступ процессорного устройства компьютерной навигационной системы к машиночитаемым инструкциям и/или базам данных не является ограничивающим условием для настоящего изобретения.
Следует отметить, что компьютерная навигационная система согласно настоящему изобретению обеспечивает возможность получения или приема параметров, отражающих или характеризующих исходное положение перемещаемого костного фрагмента и полученных посредством чрескостного аппарата согласно настоящему изобретению, и параметров, отражающих по меньшей мере одно целевое положение указанного перемещаемого костного фрагмента (все эти входные параметры также могут быть пошагово введены пользователем в предложенную компьютерную систему), в том числе следующие параметры: шесть длин телескопических стоек 3, шесть параметров положения мест соединения телескопических стоек 3 с основной кольцевой опорой 1 и подвижной кольцевой опорой 2, при этом в качестве дополнения могут быть также введены два параметра, отражающих фокусные расстояния, и еще два параметра, отражающих известные длины отрезков для масштабирования. Таким образом, вышеописанные параметры, получаемые компьютерной навигационной системой или вводимые в нее пользователем, представляют собой исходные или входные данные для этой компьютерной навигационной системы.
Для работы в компьютерной навигационной системы согласно настоящему изобретению получают масштабируемые цифровые рентгенограммы по меньшей мере двух костных фрагментов, предварительно зафиксированных в исходном положении посредством чрескостного аппарата согласно настоящему изобретению, причем масштабируемые цифровые рентгенограммы выполнены по меньшей мере в двух проекциях, если не известен масштаб рентгенограмм, снабженных рентген-позитивным предметом известной длины, который при получении рентгенограммы был размещен в поле снимка на рентгеновском столе, (например рентген-позитивной линейкой, известным расстоянием в данном случае может быть длина этой линейки), что позволяет определить реальный размер представленных на рентгенограммах костных фрагментов. Следует отметить, что масштабирование полученных цифровых рентгенограмм, используемых в компьютерной навигационной системе согласно настоящему изобретению, выполняют в полуавтоматическом режиме. В одном из вариантов реализации настоящего изобретения цифровые рентгенограммы могут быть получены, например, путем использования любой подходящей рентгеновской установки или путем обработки данных полученных с помощью томографа, а также путем сканирования обычных аналоговых рентгенограмм, при этом в качестве примера такие цифровые рентгенограммы могут быть переданы или выданы в компьютерную навигационную систему согласно настоящему изобретению из запоминающего устройства любого известного типа, входящего в состав, например, любого известного вычислительного устройства, такого как компьютер общего назначения, сервер и т.п., выполненного с возможностью связи с компьютерной навигационной системой согласно настоящему изобретению или возможностью подключения к ней.
В предложенной компьютерной навигационной системе осуществляют построение осей по меньшей мере двух костных фрагментов на полученных масштабируемых цифровых рентгенограммах, а для моделирования коррекции деформации или репозиции перелома используют скиаграммы, при этом дополнительно используют защиту от некорректного введения параметров в компьютерную систему. Об эффективности моделирования, осуществленного в компьютерной системе, судят по повышению точности репозиции и коррекции деформации костных фрагментов.
При маркировке телескопических стоек 3 используют рентгенологические маркеры 25, закрепленные на осевом элементе 24. Для осуществления маркировки телескопических стоек 3 компьютерная навигационная система позволяет отмечать или указывать на полученных цифровых рентгенограммах рентген-позитивные маркеры (см. фиг. 8) с использованием специальных функциональных возможностей или инструментов компьютерной навигационной системы. Это позволяет компьютерной навигационной системе выполнить навигацию, т.е. автоматически определить пространственное расположение центров шарниров и построить трехмерную модель чрескостного аппарата согласно настоящему изобретению. По совпадению виртуальной трехмерной модели и рентгенологической проекции телескопических стоек 3 пользователь может судить о корректности вышеописанных исходных данных, введенных в компьютерную навигационную систему (см. фиг. 9).
При помощи специальных функциональных возможностей или инструментов компьютерной навигационной системы можно выполнять осевые, угловые, плоскопараллельные и торсионные перемещения контура дистального костного фрагмента (см. фиг. 10). Согласно предписанной пользователем скорости коррекции, компьютерная навигационная система рассчитывает величину ежедневных изменений длин телескопических стоек 3.3, необходимых для получения необходимой коррекции. Дробность предписанного изменения длин телескопических стоек 3 может быть разной, в зависимости от предпочтений пользователя, например четыре раза в день. Рассчитанные величины изменения длин телескопических стоек 3 компьютерная система согласно настоящему изобретению выдает в специальном поле в виде схемы (см. фиг. 11).
Таким образом, для получения расчетной схемы изменений длин телескопических стоек 3 компьютерная навигационная система согласно настоящему изобретению обеспечивает возможность задания первого целевого положения по меньшей мере одного из костных фрагментов, являющегося первым перемещаемым костным фрагментом, относительно другого костного фрагмента, являющегося неподвижным костным фрагментом, и возможность моделирования последовательного изменения параметров, характеризующих положение чрескостного аппарата относительно указанных костных фрагментов, для коррекции и репозиции указанного по меньшей мере одного перемещаемого костного фрагмента из исходного положения в заданное первое целевое положение.
В одном из вариантов реализации настоящего изобретения при определении первого целевого положения по меньшей мере одного из костных фрагментов относительно другого костного фрагмента компьютерная система согласно настоящему изобретению может дополнительно проверять возможность заданной коррекции и/или возможность репозиции указанного по меньшей мере одного костного фрагмента по построенной трехмерной модели чрескостного аппарата согласно настоящему изобретению.
Кроме того, компьютерная навигационная система дополнительно обеспечивает возможности получения множественных промежуточных положений и окончательного положения перемещаемого костного фрагмента, что может быть использовано в случае необходимости перемещения костных фрагментов по сложной траектории. Вышеописанная дополнительная функциональная возможность компьютерной навигационной системы показана к использованию, например, при переломе со смещением костных фрагментов по длине и ширине или при контрактурах крупных суставов, т.е. в тех случаях, когда перемещение по интегральной траектории вызвало бы коллизию костных фрагментов. Для реализации вышеописанной дополнительной функциональной возможности компьютерной навигационной системы после прохождения всех вышеописанных шагов осуществляют фиксацию положения перемещаемого костного фрагмента, которое было достигнуто в результате первичного расчета (см. фиг. 12), при этом контур изменяет цвет и остается в установленном положении. В дальнейшем с использованием панели, содержащей инструменты линейных, угловых, осевых перемещений, выполняют дополнительное перемещение контура, при этом контур изменяет цвет, а новое перемещение производится относительно зафиксированного предыдущего (см. фиг. 13). Получив новое целевое положение контура перемещаемого фрагмента, вводят целевую скорость коррекции, и компьютерная навигационная система рассчитывает изменения длин телескопических стоек 3, необходимые для того, чтобы была выполнена данная коррекция. В результате данного расчета компьютерная навигационная система визуализирует схему ежедневного изменения длин телескопических стоек 3. Эта схема является продолжением первого расчета, т.е. выполняя предписанное изменение длин телескопических стоек 3, дистальный костный фрагмент будет перемещаться уже относительно достигнутого положения. Данную процедуру можно выполнять много раз, т.е. каждое новое положение перемещаемого костного фрагмента можно фиксировать и относительно него производить дополнительное (фиг. 14). Расчет изменения длин телескопических стоек 3 повторяют для каждого нового положения. Таким образом, при предписанном изменении длин телескопических стоек 3 чрескостного аппарата дистальный костный фрагмент будет перемещаться в пространстве относительно проксимального, занимая последовательно рассчитанные положения.
Таким образом, как описано выше, после для коррекции и репозиции по меньшей мере одного перемещаемого костного фрагмента из костных фрагментов из исходного положения в целевое положение компьютерная система для моделирования перемещения костного фрагмента согласно настоящему изобретению может обеспечивать дополнительную возможность задания по меньшей мере одного дополнительного целевого положения по меньшей мере одного из костных фрагментов, являющегося тем же самым перемещаемым костным фрагментом, который должен быть перемещен в заданное первое целевое положение, или же другим или новым костным фрагментом или другими или новыми перемещаемыми костными фрагментами из костных фрагментов, соответственно отличным или отличными от ранее перемещенного в заданное первое целевое положение костного фрагмента; и дополнительную возможность моделирования последовательного изменения параметров, характеризующих положение чрескостного аппарата относительно указанных костных фрагментов, для перемещения указанного по меньшей мере одного костного фрагмента, подлежащего перемещению в заданное по меньшей мере одно дополнительное целевое положение, в заданное дополнительное целевое положение из исходного положения, если этот перемещаемый в заданное дополнительное целевое положение костный фрагмент по сути является новым (другим) перемещаемым костным фрагментом, или из первого целевого положения, если этот перемещаемый в заданное дополнительное целевое положение костный фрагмент является ранее перемещенным в первое целевое положение костным фрагментом.
При этом количество дополнительных целевых положений для каждого костного фрагмента никак конкретно не ограничено, что позволяет при необходимости разделять лечение на необходимое количество отдельных промежуточных шагов: два три, четыре, и т.д.. Количество промежуточных шагов никак конкретно не ограничено и может быть выбрано индивидуально исходя из выбранной стратегии лечения.
Следует отметить, что компьютерная система согласно настоящему изобретению позволяет выполнять моделирование перемещений костного фрагмента или костных фрагментов при работе не только с предлагаемым чрескостным аппаратом, но и с другими аппаратами, имеющими аналогичную кинематику.
Для осуществления изменения длины телескопических стоек 3, следуя инструкциям предложенной компьютерной навигационной системы, выполняют поворот наружной втулки 7 в необходимом направлении. Направления изменения длины поворота наружной втулки 7 указаны знаками «+» и «-». При повороте наружной втулки 7 одновременно происходит поворот резьбовых полувтулок 8 относительно внутренней втулки 6, при этом происходит поворот и перемещение по резьбе резьбовых полувтулок 8 относительно резьбового стержня 4. Соответственно поворачиваются и перемещаются относительно резьбового стержня 4 разноразмерные выступы 22, при этом за счет того, что разница в длине соседних разноразмерных выступов 22 кратна величине шага резьбы резьбового стержня 4 поделенного на количество разноразмерных выступов 22, их торцевые поверхности поочередно совмещаются с одним из штрихов шкалы 26, указывая фактическую длину телескопической стойки 3, которая представляет собой сумму из цифрового значения, соответствующего штриху шкалы 26, нанесенной на резьбовой стержень 4, и цифрового значения, указанного на маркировке разноразмерного выступа 22, торцевая поверхность 33 которого совмещена с соответствующим одним из штрихов шкалы 26 на резьбовом стержне 4.
В одном из вариантов реализации настоящего изобретения может быть выбран резьбовой стержень 4, имеющий диаметр 12 мм, четыре разноразмерных выступа 22 могут быть расположены под углом 90 градусов по отношению друг к другу, а шаг резьбы резьбового стержня 4 может составлять 2 мм. В данном варианте реализации настоящего изобретения минимально возможный шаг изменения длины телескопической стойки 3, который можно фиксировать по шкале 26, будет составлять 0,5 мм. Количество разноразмерных выступов 22, равномерно расположенных по окружности, и шаг резьбы резьбового стержня 4 определяют минимальный шаг изменения длины телескопической стойки 3. При этом минимальный шаг изменения длины телескопической стойки 3 равен шагу резьбы резьбового стержня 4 поделенному на количество разноразмерных выступов 22. Количество разноразмерных выступов 22 при разных вариантах реализации изобретения может быть 2, 3, 4, 5, 6, 7, 8 о более выступов.
Для осуществления быстрой коррекции деформации с каждой телескопической стойкой 3 проделывают следующие манипуляции: с репозиционного узла 5 удаляют блокирующую скобу 31, при этом наружная втулка 7 получает возможность ограниченного осевого перемещения относительно резьбовых полувтулок 8. В дальнейшем наружную втулку 7 перемещают в сторону кольцевого упругого элемента 21 до упора, при этом резьбовые концы резьбовых полувтулок 8 удаляются от оси резьбового стержня 4, их резьбовое соединение с резьбовым стержнем 4 размыкается, а резьбовой стержень 4 получает возможность осевого перемещения относительно внутренней втулки 6. После осуществления коррекции деформации каждую из телескопических стоек 3 приводят в исходное состояние. Для приведения каждой из телескопических стоек 3 в исходное состояние наружную втулку 7 перемещают вдоль оси в сторону разноразмерных выступов 22 до упора, при этом происходит приближение резьбовых концов резьбовых втулок 8 к оси резьбового стержня 4, а их резьбовое соединение замыкается. В завершение на репозиционный узел 5 устанавливают блокирующую скобу 31.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ остеосинтеза при деформации костей предплечья | 2019 |
|
RU2734139C1 |
| АППАРАТ ДЛЯ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА СОЛОМИНА-УТЕХИНА-ВИЛЕНСКОГО | 2007 |
|
RU2352283C2 |
| АППАРАТ ДЛЯ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА "SUV-Frame" | 2006 |
|
RU2336842C2 |
| СПОСОБ МОДУЛЬНОГО ОСТЕОСИНТЕЗА АППАРАТОМ ТЭЙЛОРА | 2008 |
|
RU2370233C1 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ ОРТО-СУВ ПРИ ДЕФОРМАЦИЯХ СРЕДНЕГО ОТДЕЛА СТОПЫ | 2011 |
|
RU2489106C2 |
| Способ коррекции многоуровневых деформаций длинных костей | 2016 |
|
RU2640999C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЧРЕСКОСТНЫМ АППАРАТОМ | 2006 |
|
RU2327430C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОГО ПРИМЕНЕНИЯ ЧРЕСКОСТНОГО И ИНТРАМЕДУЛЛЯРНОГО БЛОКИРУЕМОГО ОСТЕОСИНТЕЗА | 2015 |
|
RU2593583C1 |
| СТЕРЖНЕВОЙ АППАРАТ ДЛЯ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА | 2006 |
|
RU2311886C1 |
| АППАРАТ ВНЕШНЕЙ ФИКСАЦИИ ДЕТСКИЙ ДЛЯ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА | 2017 |
|
RU2663636C1 |









Группа изобретений относится к медицине. Телескопическая стойка для чрескостного аппарата включает резьбовой стержень, внутреннюю втулку, осевой элемент, на котором закреплены рентген-позитивные маркеры, репозиционный узел, размещенный на внутренней втулке с возможностью поворота и состоящий из блокирующей скобы, наружной втулки, выполненной с возможностью поворота с обеспечением изменения длины телескопической стойки, двух полувтулок, помещенных внутрь наружной втулки с обеспечением резьбового взаимодействия с резьбовым стержнем и обеспечением возможности ограниченного осевого перемещения наружной втулки по отношению к указанным полувтулкам, резьбового стержня, соединенного посредством полувтулок с внутренней и наружной втулками таким образом, что он проходит внутри указанных втулок. На резьбовой стержень нанесена шкала, соответствующая маркировке длины телескопической стойки. На торцевых поверхностях полувтулок выполнены по меньшей мере два разноразмерных выступа. При повороте наружной втулки обеспечена возможность поворота указанных полувтулок относительно внутренней втулки с обеспечением их поворота и перемещения относительно резьбового стержня, что приводит к поочередному совмещению торцевых поверхностей разноразмерных выступов с одним из штрихов шкалы резьбового стержня. При удалении блокирующей скобы с репозиционного узла наружная втулка получает возможность ограниченного осевого перемещения относительно резьбовых полувтулок. Осевой элемент размещен во внутренней полости, образованной осевым отверстием резьбового стержня и осевым отверстием внутренней втулки. Резьбовой стержень и внутренняя втулка выполнены из рентген-прозрачного материала. Чрескостный аппарат содержит основную опору, подвижную опору и вышеуказанные телескопические стойки, соединяющие между собой указанные опоры. Способ моделирования перемещения костного фрагмента выполняется на процессорном устройстве, при этом указанный способ включает в себя следующие этапы: получение по меньшей мере двух масштабируемых цифровых рентгенограмм по меньшей мере двух костных фрагментов, предварительно зафиксированных в исходном положении посредством вышеуказанного чрескостного аппарата. По меньшей мере две масштабируемые цифровые рентгенограммы выполнены по меньшей мере в двух проекциях. Далее получение параметров положения элементов чрескостного аппарата относительно указанных по меньшей мере двух костных фрагментов, построение осей указанных по меньшей мере двух костных фрагментов на полученных по меньшей мере двух рентгенограммах, осуществление маркировки телескопических стоек чрескостного аппарата путем указания рентген-позитивных маркеров на полученных по меньшей мере двух рентгенограммах с обеспечением построения трехмерной модели упомянутого чрескостного аппарата; задание первого целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов относительно другого костного фрагмента; моделирование последовательных изменений указанных полученных параметров положения элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента из исходного положения в заданное первое целевое положение; задание по меньшей мере одного дополнительного целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов; и моделирование последовательного изменения параметров элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента из исходного положения или первого целевого положения в заданное по меньшей мере одно дополнительное целевое положение или из исходного положения в дополнительное целевое положение и из дополнительного целевого положения в первое целевое положение. Компьютерная система для моделирования перемещения костного фрагмента содержит процессорное устройство, выполненное с возможностью осуществления операций вышеуказанного способа моделирования перемещения костного фрагмента. Изобретения обеспечивают облегчение и упрощение конструкции аппарата и стоек; упрощение визуализации костных фрагментов на рентгенограммах и более точную коррекцию деформации; предотвращение ошибок для пациента при пользовании шкалой в ходе коррекции деформации; сокращение времени при подготовке стойки к режиму быстрой коррекции деформации и при последующей фиксации стойки. 4 н. и 12 з.п. ф-лы, 14 ил.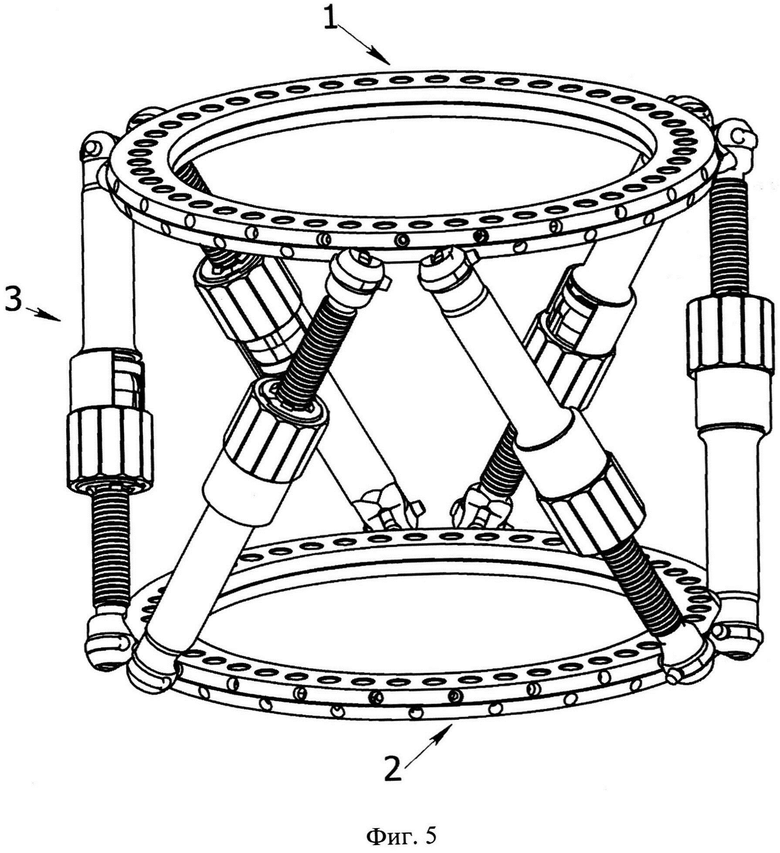
1. Телескопическая стойка для чрескостного аппарата, включающая резьбовой стержень, внутреннюю втулку, осевой элемент, на котором закреплены рентген-позитивные маркеры, репозиционный узел, размещенный на внутренней втулке с возможностью поворота и состоящий из блокирующей скобы, наружной втулки, выполненной с возможностью поворота с обеспечением изменения длины телескопической стойки, двух полувтулок, помещенных внутрь наружной втулки с обеспечением резьбового взаимодействия с резьбовым стержнем и обеспечением возможности ограниченного осевого перемещения наружной втулки по отношению к указанным полувтулкам, резьбового стержня, соединенного посредством полувтулок с внутренней и наружной втулками таким образом, что он проходит внутри указанных втулок,
на резьбовой стержень нанесена шкала, соответствующая маркировке длины телескопической стойки,
на торцевых поверхностях полувтулок выполнены по меньшей мере два разноразмерных выступа,
при этом при повороте наружной втулки обеспечена возможность поворота указанных полувтулок относительно внутренней втулки с обеспечением их поворота и перемещения относительно резьбового стержня, что приводит к поочередному совмещению торцевых поверхностей разноразмерных выступов с одним из штрихов шкалы резьбового стержня, при удалении блокирующей скобы с репозиционного узла наружная втулка получает возможность ограниченного осевого перемещения относительно резьбовых полувтулок, осевой элемент размещен во внутренней полости, образованной осевым отверстием резьбового стержня и осевым отверстием внутренней втулки, при этом резьбовой стержень и внутренняя втулка выполнены из рентген-прозрачного материала.
2. Телескопическая стойка по п. 1, в которой рентген-позитивные маркеры представляют собой сферические и/или цилиндрические элементы, скрепленные осевым элементом, протянутым сквозь осевые отверстия, выполненные в резьбовом стержне и внутренней втулке.
3. Телескопическая стойка по п. 2, в которой осевой элемент представляет собой резинку или нить.
4. Телескопическая стойка по п. 1, в которой расстояние между сторонами резьбового профиля резьбы резьбового стержня, измеренное на уровне наружного диаметра резьбы резьбового стержня в осевом направлении, по меньшей мере на десять процентов больше, чем расстояние между сторонами резьбового профиля резьбы репозиционного узла, измеренное в осевом направлении на уровне наружного диаметра резьбы резьбового стержня.
5. Чрескостный аппарат, содержащий:
основную опору, подвижную опору,
телескопические стойки по пп. 1-4, соединяющие между собой указанные опоры.
6. Чрескостный аппарат по п. 5, в котором каждый из концов указанной телескопической стойки шарнирно соединен с соответствующим резьбовым штырем, выполненным с возможностью резьбового соединения с соответствующей одной из указанных опор.
7. Чрескостный аппарат по любому из пп. 5, 6, в котором указанные опоры выполнены из рентген-прозрачного материала.
8. Способ моделирования перемещения костного фрагмента, выполняемый на процессорном устройстве, при этом указанный способ включает в себя следующие этапы:
получение по меньшей мере двух масштабируемых цифровых рентгенограмм по меньшей мере двух костных фрагментов, предварительно зафиксированных в исходном положении посредством чрескостного аппарата по любому из пп. 5-7, причем по меньшей мере две масштабируемые цифровые рентгенограммы выполнены по меньшей мере в двух проекциях;
получение параметров положения элементов чрескостного аппарата относительно указанных по меньшей мере двух костных фрагментов;
построение осей указанных по меньшей мере двух костных фрагментов на полученных по меньшей мере двух рентгенограммах;
осуществление маркировки телескопических стоек чрескостного аппарата путем указания рентген-позитивных маркеров на полученных по меньшей мере двух рентгенограммах с обеспечением построения трехмерной модели упомянутого чрескостного аппарата;
задание первого целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов относительно другого костного фрагмента;
моделирование последовательных изменений указанных полученных параметров положения элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента из исходного положения в заданное первое целевое положение;
задание по меньшей мере одного дополнительного целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов; и
моделирование последовательного изменения параметров элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента из исходного положения или первого целевого положения в заданное по меньшей мере одно дополнительное целевое положение или из исходного положения в дополнительное целевое положение и из дополнительного целевого положения в первое целевое положение.
9. Способ по п. 8, в котором получаемые параметры положения элементов чрескостного аппарата относительно указанных по меньшей мере двух костных фрагментов определяют с использованием рентген-позитивных маркеров, закрепленных на осевом элементе телескопической стойки, размещенном во внутренней полости, образованной осевым отверстием резьбового стержня и осевым отверстием внутренней втулки.
10. Способ по п. 9, в котором при определении параметров положения элементов чрескостного аппарата относительно указанных по меньшей мере двух костных фрагментов определяют длины телескопических стоек и места соединения телескопических стоек с основной и подвижной опорами.
11. Способ по любому из пп. 8-10, в котором дополнительно определяют корректность указанных параметров по совпадению проекций построенной трехмерной модели чрескостного аппарата и рентгенологических проекциях телескопических стоек чрескостного аппарата на полученных масштабируемых цифровых рентгенограммах.
12. Способ по п. 8, в котором моделированием программы последовательного изменения параметров элементов чрескостного аппарата перемещения по меньшей мере одного костного фрагмента осуществляют с учетом предварительно заданного или автоматически определенного временного отрезка на осуществление перемещения.
13. Способ по п. 8, в котором программа последовательного изменения параметров элементов чрескостного аппарата включает по меньшей мере последовательность изменений длин телескопических стоек чрескостного аппарата на протяжении заданного или автоматически определенного временного отрезка.
14. Способ по п. 8, в котором при определении первого целевого положения или по меньшей мере одного дополнительного целевого положения по меньшей мере одного из указанных по меньшей мере двух костных фрагментов относительно другого костного фрагмента проверяют возможность заданного перемещения указанного по меньшей мере одного костного фрагмента путем сравнения параметров построенной трехмерной модели чрескостного аппарата с интервалами их допустимых значений.
15. Способ по любому из пп. 8-14, в котором дополнительное целевое положение представляет собой серию из двух и более последовательных дополнительных целевых положений, причем осуществляют моделирование последовательного изменения параметров элементов чрескостного аппарата для перемещения указанного по меньшей мере одного костного фрагмента:
либо из исходного положения в первое дополнительное положение из серии последовательных дополнительных положений, затем последовательное перемещение, включающее перемещения между дополнительными положениями из серии последовательных дополнительных положений, от первого дополнительного положения в крайнее дополнительное положение из серии последовательных дополнительных положений, затем перемещение от крайнего дополнительного положения из серии дополнительных положений в заданное по меньшей мере одно первое целевое положение;
либо из исходного положения в первое по меньшей мере одно первое целевое положение, затем из первого целевого положения в первое дополнительное положение из серии последовательных дополнительных положений, затем последовательное перемещение, включающее перемещения между дополнительными положениями из серии последовательных дополнительных положений, от первого дополнительного положения в крайнее дополнительное положение из серии последовательных дополнительных положений с образованием второго целевого положения.
16. Компьютерная система для моделирования перемещения костного фрагмента, содержащая процессорное устройство, выполненное с возможностью осуществления операций способа моделирования перемещения костного фрагмента по пп. 8-15.
| Маркировочная краска для холодного клеймения | 1955 |
|
SU105821A1 |
| Конструктивное выполнение узла катод-подогреватель электровакуумных приборов | 1959 |
|
SU125838A1 |
| WO 1992022268 A1, 23.12.1992 | |||
| US 9717527 B2, 01.08.2017 | |||
| US 9936975 B2, 10.04.2018 | |||
| US 20170042580 A1, 16.02.2017 | |||
| US 7422593 B2, 09.09.2008 | |||
| US 8388619 B2, 05.03.2013 | |||
| US 20160310168 A1, 27.10.2016. | |||

