ОБЛАСТЬ ТЕХНИКИ
[0001] Представленная технология относится к беспилотным автомобилям и, более конкретно, к способу и системе для генерации опорного пути для беспилотного автомобиля.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В предшествующем уровне техники были предложены и реализованы различные автоматизированные навигационные системы. Эти системы варьируются от более базовых решений, основанных на локализации с помощью карты, т.е. на использовании компьютерной системы для поддержки водителя при навигации по маршруту от начального пункта до пункта назначения; до более сложных решений - систем вождения с компьютерной поддержкой и/или без вмешательства водителя.
[0003] Некоторые из этих систем реализованы как то, что является общеизвестным как система “круиз-контроля”. В этих системах, компьютерная система на борту транспортного средства поддерживает установленную пользователем скорость транспортного средства. Некоторые из систем круиз-контроля реализуют систему “интеллектуального управления дистанцией”, причем пользователь может установить дистанцию до потенциально находящегося впереди автомобиля (например, выбрать значение, выраженное числом транспортных средств), и компьютерная система регулирует скорость транспортного средства, основываясь, по меньшей мере частично, на транспортном средстве, приближающемся к потенциально находящемуся впереди транспортному средству в пределах предварительно заданной дистанции. Некоторые из систем круиз-контроля дополнительно оснащены системой контроля столкновений, такие системы, после обнаружения транспортного средства (или иного препятствия) впереди движущегося транспортного средства, замедляют или останавливают данное транспортное средство.
[0004] Некоторые из более продвинутых систем обеспечивают полностью автономное вождение транспортного средства без прямого управления оператором (т.е. водителем), так называемые беспилотные автомобили (Self-Driving Car, (SDC). Данный SDC включает в себя компьютерные системы, которые могут побуждать SDC ускоряться, тормозить, останавливаться, менять полосу движения и самостоятельно парковаться.
[0005] Одной из технических проблем при реализации вышеописанных компьютерных систем является планирование операции SDC при приближении к повороту.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0006] Задачей настоящей технологии является устранить по меньшей мере некоторые из неудобств, присутствующих в предшествующем уровне техники. Варианты осуществления настоящей технологии могут предоставить и/или расширить спектр подходов к способам реализации целей и задач настоящей технологии.
[0007] Беспилотный автомобиль (SDC) обычно оборудован электронным устройством и различными сенсорами. Например, электронное устройство может быть выполнено для приема и обработки данных о полосах на сегменте дороги, по которому движется SDC, такие, например, как данные, указывающие геометрию, форму и границы полосы. Также электронное устройство может быть выполнено для приема и обработки данных об объектах в окружении SDC, таких, например, как данные, указывающие типы объектов, движение объектов и геометрию объектов.
[0008] Следует отметить, что полосы могут иметь различные характеристики и формы. Например, некоторые полосы могут представлять собой по существу прямые полосы, в то время как другие могут иметь изгиб (такой как изгиб на шоссе), могут представлять собой U-образные полосы и/или L-образные полосы, такие как полосы поворота. Также, полосы на сегменте дороги могут обычно задаваться левой границей и правой границей и наличием центральной линии между этими границами.
[0009] Разработчики настоящей технологии исходили из того, что при нормальных условиях опорный путь транспортного средства, т.е. точка привязки полосы, вдоль которой должны двигаться транспортные средства, представляет собой центральную линию данной полосы. Это может осуществляться, например, в целях безопасности. Таким образом, при нормальных условиях SDC должен двигаться вдоль опорного пути по умолчанию, который соответствует центральной линии полосы. В одном примере, середина заднего моста SDC может использоваться в качестве опорной точки между SDC и центральной линией полосы для обеспечения того, что SDC движется вдоль центральной линии полосы.
[0010] Разработчики настоящей технологии установили, что опорный путь по умолчанию для SDC может быть представлен множеством точек привязки (например, позиционных точек на полосе), которые приходятся на центральную линию полосы и которым SDC должно следовать во время выполнения действий в полосе.
[0011] Разработчики настоящей технологии также спроектировали электронное устройство, которое может быть выполнено с возможностью непрерывной верификации, следует ли в текущее время SDC опорному пути по умолчанию в полосе и находится ли SDC в пределах ограничений на сегменте дороги. Например, ограничения на сегменте дороги могут включать в себя границы полосы, в которой движется SDC. Также, разработчики настоящей технологии спроектировали электронное устройство, которое может быть выполнено с возможностью действия при определенных условиях для изменения опорного пути по умолчанию, чтобы попадать в пределы ограничений сегмента дороги и запустить SDC, чтобы действовать в соответствии с измененным путем.
[0012] Однако разработчики настоящей технологии поняли по меньшей мере одну техническую проблему, ассоциированную с подходами предшествующего уровня техники. Более конкретно, они поняли, что изменение данного опорного пути может быть технически сложной задачей.
[0013] Например, когда полоса не является прямой, такой как в случае полосы поворота, имеется риск того, что во время маневра поворота часть SDC выходит за границы полосы поворота. По меньшей мере в некоторых вариантах осуществления настоящей технологии, разработчики настоящей технологии создали способы и системы, чтобы избегать таких небезопасных ситуаций путем изменения опорного пути по умолчанию SDC на полосе поворота и при этом определять измененный путь, которому SDC должен следовать в полосе поворота, чтобы он попадал в пределы ограничений сегмента дороги (например, границ полосы).
[0014] С этой целью разработчики разработали систему, которая, в некоторых вариантах осуществления настоящей технологии содержит электронное устройство 800 и множество сенсоров 814, как изображено на фиг. 8. Такая система может быть установлена, оборудована или иным образом связана с данным SDC. Электронное устройство 800, например, может быть выполнено для реализации: модуля 812 восприятия, устройства 804 отслеживания геометрии полосы, модуля 806 моделирования ограничительной рамки, опционального устройства 808 отслеживания динамических объектов, опциональной опорной базы 810 данных истории динамических объектов и модуля 802 вычисления опорного пути. Следует отметить, что данный модуль в контексте настоящего описания может относиться к одной или нескольким реализуемым компьютером процедурам, которые электронное устройство способно реализовывать для выполнения обработки и/или генерации данных, как описано здесь. Альтернативно данный модуль может представлять собой физическое электронное устройство. Альтернативно несколько модулей (или все модули) могут быть реализованы в одном электронном устройстве.
[0015] В некоторых неограничивающих вариантах осуществления множество сенсоров 814 могут быть выполнены для непрерывного получения данных об окружении SDC, включая, но без ограничения: данные о текущей полосе, в которой движется SDC, геометрию текущей полосы, геометрию соседних полос (и данные в общем о сегменте дороги, по которому движется SDC), данные о динамических объектах и их положениях в соседних полосах, кинематические данные, ассоциированные с этими объектами, и геометрические данные об этих объектах (и данные в общем об объектах, которые находятся вблизи SDC). Данные сенсоров могут предоставляться на модуль 812 восприятия для дополнительной обработки. В некоторых случаях, назначение модуля 812 восприятия состоит в обработке и передаче данных, которые другие части системы могут требовать для дополнительной обработки.
[0016] Разработчики настоящей технологии осознали, что настоящая технология может использоваться не только для определения измененного пути для SDC, но может также использоваться для определения прогнозируемого пути динамических объектов в окружении SDC. В некоторых вариантах осуществления, предполагается, что аналогичные способы могут применяться для (i) определения измененного пути для SDC и (ii) определения прогнозируемого пути динамических объектов в окружении SDC.
[0017] Теперь будет кратко обсужден первый сценарий, в котором система выполнена с возможностью определения измененного пути для SDC. В таком сценарии, устройство 804 отслеживания геометрии полосы может принимать данные от модуля 812 восприятия, например, о ширине текущей полосы, в которой движется SDC. В других случаях, эти данные могут быть получены из HD карты сегмента дороги, которая хранится либо локально на электронном устройстве 800, либо удаленно от электронного устройства 800. Устройство 804 отслеживания геометрии полосы может определять позиционные данные, указывающие центральную линию текущей полосы. В одном варианте осуществления настоящего раскрытия, устройство 804 отслеживания геометрии полосы может определять позиционные данные в форме полилинии. Такая полилиния может включать в себя вершины и ребра. Электронное устройство 800 может быть выполнено с возможностью преобразования такой полилинии в непрерывную линию посредством процедуры сплайновой (трехкоординатной) интерполяции. В некоторых случаях, центральная линия текущей полосы может использоваться модулем 802 вычисления опорного пути для определения опорного пути по умолчанию SDC в текущей полосе.
[0018] В первом сценарии предполагается, что модуль 806 моделирования ограничительной рамки может быть выполнен с возможностью создания ограничительной рамки, которая представляет собой смоделированное представление SDC на сегменте дороги и которая соответствует площади, перекрываемой SDC на сегменте дороги.
[0019] В некоторых неограничивающих вариантах осуществления модуль 806 моделирования ограничительной рамки может быть выполнен с возможностью создания полигона, который представляет собой увеличенное смоделированное представление SDC и который перекрывает площадь на сегменте дороги, которая больше, чем действительная площадь, перекрываемая SDC на сегменте дороги.
[0020] В других неограничивающих вариантах осуществления ограничительная рамка, соответствующая площади, перекрываемой посредством SDC, может создаваться и затем может поворачиваться вокруг оси, проходящей через середину заднего моста SDC (например, +/-20 градусов), что приводит к увеличенному полигону. Этот увеличенный полигон также представляет собой увеличенное смоделированное представление SDC и перекрывает площадь на сегменте дороги, которая больше, чем действительная площадь, перекрываемая посредством SDC на сегменте дороги.
[0021] В некоторых случаях модуль 806 моделирования ограничительной рамки может быть выполнен с возможностью передачи данных на модуль 802 вычисления опорного пути для дополнительной обработки. Модуль 802 вычисления опорного пути может быть выполнен с возможностью верификации, что SDC в текущее время движется вдоль опорного пути по умолчанию и, при необходимости, изменения опорного пути по умолчанию так, чтобы SDC попадал в пределы ограничений текущей полосы, в которой он движется. Например, модуль 802 вычисления опорного пути может принимать данные об опорном пути по умолчанию от устройства 804 отслеживания геометрии полосы и о смоделированном представлении SDC от модуля 806 моделирования ограничительной рамки, и в свою очередь может быть выполнен с возможностью моделирования того, приведет ли следование опорному пути по умолчанию к выходу SDC за ограничения текущей полосы. В некоторых неограничивающих вариантах осуществления настоящей технологии, ограничения текущей полосы могут быть реализованы как левая и правая граница полосы (которые могут быть маркированными или не маркированными в физическом смысле реального мира, например, разметкой полосы).
[0022] Предполагается, что модуль 802 вычисления опорного пути может быть выполнен с возможностью анализа опорного пути по умолчанию как множество точек привязки в текущей полосе. Модуль 802 вычисления опорного пути может быть выполнен с возможностью моделирования движения SDC в текущей полосе, как если бы середина заднего моста SDC перемещалась от одной точки привязки к следующей точке привязки в текущей полосе, и может быть выполнен с возможностью верификации, выходит ли какая-либо часть SDC из границ текущей полосы, если SDC движется таким образом в текущей полосе.
[0023] В одном неограничивающем варианте осуществления настоящего раскрытия вместо такого движения смоделированного представления SDC, модуль 802 вычисления опорного пути может быть выполнен с возможностью использования увеличенного смоделированного представления SDC, как упомянуто выше, и моделирования движения увеличенного смоделированного представления SDC в текущей полосе, как если бы увеличенное смоделированное представление двигалось от одной точки привязки к следующей точке привязки.
[0024] В некоторых вариантах осуществления модуль 802 вычисления опорного пути может быть выполнен с возможностью определения и сохранения крайних левых и крайних правых точек, где ограничительная рамка попадает в пределы текущей полосы. Разработчики настоящей технологии выяснили, что эти данные могут позволить осуществлять определение коридора безопасного отклонения в текущей полосе, так что, когда SDC движется в пределах коридора безопасного отклонения текущей полосы, SDC будет попадать в пределы ограничений (например, границы) текущей полосы.
[0025] В некоторых вариантах осуществления настоящей технологии электронное устройство 800 может быть выполнено с возможностью определения измененного пути (или иногда упоминаемого здесь “измененного опорного пути”), так что измененный путь соответствует коридору безопасного отклонения. Например, электронное устройство 800 может быть выполнено с возможностью определения полилинии, которая проходит через коридор безопасного отклонения. В некоторых неограничивающих вариантах осуществления такая полилиния может дополнительно обрабатываться электронным устройством 800 по процедуре интерполяции или другими известными способами для определения “сглаженного” измененного пути в коридоре безопасного отклонения. Предполагается, что сглаживание измененного пути может позволить SDC повышать комфорт для пассажиров и/или дополнительно уменьшать опасные маневры сегмента дороги.
[0026] В некоторых случаях электронное устройство может определять, что измененный путь, который позволит SDC находиться в границах текущей полосы, отсутствует. В таких случаях электронное устройство 800 может быть выполнено с возможностью определения данного измененного пути, где модуль 802 вычисления опорного пути выполнен с возможностью изменения опорного пути по умолчанию таким образом, что в результате SDC одинаково выходит за левую и правую границы текущей полосы.
[0027] Во втором сценарии электронное устройство 800 может быть выполнено с возможностью определения прогнозируемого пути для динамических объектов в окружении SDC. В некоторых вариантах осуществления электронное устройство 800 может также инициировать действие SDC так, что его действие регулируется с точки зрения прогнозируемого пути динамического объекта, чтобы избегать столкновения и для других целей безопасности.
[0028] В этом втором сценарии устройство 808 отслеживания динамических объектов может принимать данные от модуля 812 восприятия, например, в отношении обнаруженных объектов, движущихся по соседним полосам. Эти данные могут включать в себя, помимо прочего, геометрический размер динамических объектов и их положения в полосах. Устройство 808 отслеживания динамических объектов может быть выполнено с возможностью назначения ID соответственному обнаруженному динамическому объекту и сохранения соответственных данных о динамических объектах в ассоциации с соответственными ID в базе данных истории путей.
[0029] Разработчики настоящей технологии осознали, что при сохранении и анализе данных о динамических объектах в соседних полосах, электронное устройство 800 может быть выполнено с возможностью определения опорных путей для соответственных динамических объектов относительно центральных линий соответственных полос, где движется данный объект.
[0030] В некоторых случаях устройство отслеживания динамических объектов может быть выполнено с возможностью обнаружения, когда положение динамического объекта относительно центральной линии соответственной полосы возрастает, и в результате, определять, что динамический объект пытается произвести маневр смены полосы. Данные, указывающие такое определение устройством 808 отслеживания динамических объектов, могут передаваться на модуль 802 вычисления опорного пути.
[0031] Во втором сценарии модуль 806 моделирования ограничительной рамки может быть выполнен для обработки динамического объекта аналогично тому, как модуль 806 моделирования ограничительной рамки выполнен в первом сценарии для обработки данных в отношении SDC. Также, модуль 802 вычисления опорного пути может быть выполнен во втором сценарии для соответственного динамического объекта аналогично тому, как модуль 802 вычисления опорного пути выполнен для SDC в первом сценарии. В таком случае, разработчики настоящей технологии разработали способы и системы, где модуль 802 вычисления опорного пути выполнен с возможностью определения измененных путей, которые следуют предположению, что нормальное поведение динамических объектов состоит в том, чтобы следовать опорному пути по умолчанию, который попадает в пределы границ соответственных полос.
[0032] В некоторых вариантах осуществления, когда устройство 808 отслеживания динамических объектов передает данные, указывающие динамический объект, пытающийся произвести маневр смены полосы, модуль 802 вычисления опорного пути может быть выполнено с возможностью определения опорного пути смены полосы на основе исторических данных о динамическом объекте и центральной линии соответственной полосы.
[0033] В первом широком аспекте настоящей технологии обеспечен реализуемый компьютером способ изменения опорного пути, ассоциированного с транспортным средством. Опорный путь представляет собой путь вдоль сегмента дороги, которому, по оценкам, должно следовать транспортное средство. Способ может выполняться электронным устройством. Способ содержит получение, электронным устройством, данных сегмента дороги и данных опорного пути. Данные сегмента дороги указывают ограничения сегмента дороги. Данные опорного пути имеют множество точек привязки, задающих опорный путь вдоль сегмента дороги. Способ содержит использование, электронным устройством, данных сегмента дороги и данных опорного пути для определения интервала безопасного отклонения для каждой точки из множества точек привязки. Данный интервал безопасного отклонения для данной точки привязки указывает приемлемое отклонение транспортного средства от опорного пути, так что, если транспортное средство расположено в пределах данного интервала безопасного отклонения, транспортное средство попадает в пределы ограничений сегмента дороги. Способ содержит использование, электронным устройством, интервалов безопасного отклонения для определения измененного пути для транспортного средства вместо опорного пути, так что при следовании измененному пути транспортное средство попадает в пределы ограничений сегмента дороги.
[0034] В некоторых вариантах осуществления способа интервалы безопасного отклонения образуют коридор безопасного отклонения для транспортного средства, где коридор безопасного отклонения задает участок сегмента дороги, на котором транспортное средство попадает в пределы ограничений сегмента дороги.
[0035] В некоторых вариантах осуществления способа измененный путь соответствует коридору безопасного отклонения.
[0036] В некоторых вариантах осуществления способа ограничения содержат по меньшей мере одно из (i) физических ограничений на сегменте дороги, и (ii) ограничений правил дорожного движения на сегменте дороги.
[0037] В некоторых вариантах осуществления способа электронное устройство ассоциировано с беспилотным автомобилем (SDC).
[0038] В некоторых вариантах осуществления способа транспортное средство представляет собой SDC.
[0039] В некоторых вариантах осуществления способа способ дополнительно содержит генерацию опорного пути.
[0040] В некоторых вариантах осуществления способа SDC отличается от транспортного средства, и способ дополнительно содержит генерацию опорного пути путем осуществления доступа к базе данных исторических маневров, ассоциированной с транспортным средством, и генерацию прогноза опорного пути.
[0041] В некоторых вариантах осуществления способа способ дополнительно содержит генерацию, электронным устройством, данных управления действием для управления действием SDC. Данные управления действием представляют компьютерные команды для SDC, чтобы следовать измененному пути вдоль сегмента дороги.
[0042] В некоторых вариантах осуществления способа SDC расположен вблизи транспортного средства на сегменте дороги.
[0043] В некоторых вариантах осуществления способа способ дополнительно содержит использование, электронным устройством, измененного пути транспортного средства для модифицирования текущего пути SDC вдоль сегмента дороги.
[0044] В некоторых вариантах осуществления способа использование данных сегмента дороги и данных опорного пути для определения интервалов безопасного отклонения дополнительно содержит: (i) генерацию, электронным устройством, смоделированного представления транспортного средства для соответственной точки привязки из множества точек привязки на смоделированном представлении сегмента дороги, и (ii) определение, электронным устройством, интервалов безопасного отклонения соответственных точек привязки из множества точек привязки на основе соответственного смоделированного представления транспортного средства на смоделированном представлении сегмента дороги.
[0045] В некоторых вариантах осуществления способа смоделированное представление транспортного средства перекрывает искусственно увеличенную поверхность на смоделированном представлении сегмента дороги. Искусственно увеличенная поверхность больше, чем действительная поверхность, которую перекрывает транспортное средство на сегменте дороги.
[0046] В некоторых вариантах осуществления способа смоделированное представление транспортного средства перекрывает действительную поверхность на смоделированном представлении сегмента дороги, и способ дополнительно содержит, как часть определения интервалов безопасного отклонения соответственных точек привязки, вращение смоделированного представления с использованием предопределенного угла для генерации увеличенной проекции транспортного средства на сегмент дороги.
[0047] В некоторых вариантах осуществления способа использование интервалов безопасного отклонения для определения измененного пути содержит: (i) определение, электронным устройством, измененных точек привязки для соответственных интервалов безопасного отклонения, так что данная измененная точка привязки попадает в пределы соответственного интервала безопасного отклонения, и (ii) определение, электронным устройством, что измененный путь представляет собой последовательность измененных точек привязки.
[0048] В некоторых вариантах осуществления способа данная измененная точка привязки соответствует середине соответственного безопасного интервала.
[0049] В некоторых вариантах осуществления способа последовательность измененных точек привязки содержит полилинию.
[0050] В некоторых вариантах осуществления способа содержится задание множества точек привязки.
[0051] В некоторых вариантах осуществления способа задание основано по меньшей мере на скорости транспортного средства.
[0052] Во втором широком аспекте настоящей технологии обеспечено электронное устройство для изменения опорного пути, ассоциированного с транспортным средством. Опорный путь представляет собой путь вдоль сегмента дороги, которому, по оценкам, должно следовать транспортное средство. Электронное устройство выполнено с возможностью получения данных сегмента дороги и данных опорного пути. Данные сегмента дороги указывают ограничения сегмента дороги. Данные опорного пути имеют множество точек привязки, задающих опорный путь вдоль сегмента дороги. Электронное устройство выполнено с возможностью использовать данные сегмента дороги и данные опорного пути для определения интервала безопасного отклонения для каждой точки из множества точек привязки. Данный интервал безопасного отклонения для данной точки привязки указывает приемлемое отклонение транспортного средства от опорного пути, так что, если транспортное средство расположено в пределах данного интервала безопасного отклонения, транспортное средство попадает в пределы ограничений сегмента дороги. Электронное устройство выполнено с возможностью использования интервалов безопасного отклонения для определения измененного пути для транспортного средства вместо опорного пути, так что при следовании измененному пути транспортное средство попадает в пределы ограничений сегмента дороги.
[0053] В некоторых вариантах осуществления электронного устройства интервалы безопасного отклонения образуют коридор безопасного отклонения для транспортного средства, и коридор безопасного отклонения задает участок сегмента дороги, на котором транспортное средство попадает в пределы ограничений сегмента дороги.
[0054] В некоторых вариантах осуществления электронного устройства измененный путь соответствует коридору безопасного отклонения.
[0055] В некоторых вариантах осуществления электронного устройства ограничения содержат по меньшей мере одно из (i) физических ограничений на сегменте дороги и (ii) ограничений правил дорожного движения на сегменте дороги.
[0056] В некоторых вариантах осуществления электронного устройства электронное устройство ассоциировано с беспилотным автомобилем (SDC).
[0057] В некоторых вариантах осуществления электронного устройства транспортное средство представляет собой SDC.
[0058] В некоторых вариантах осуществления электронного устройства способ дополнительно содержит генерацию опорного пути.
[0059] В некоторых вариантах осуществления электронного устройства SDC отличается от транспортного средства, причем способ дополнительно содержит генерацию опорного пути посредством осуществления доступа к базе данных исторических маневров, ассоциированной с транспортным средством, и генерацию прогноза опорного пути.
[0060] В некоторых вариантах осуществления электронного устройства способ дополнительно содержит генерацию, электронным устройством, данных управления действием для управления действием SDC, и данные действием представляют компьютерные команды для SDC, чтобы следовать измененному пути вдоль сегмента дороги.
[0061] В некоторых вариантах осуществления электронного устройства SDC расположено вблизи транспортного средства на сегменте дороги.
[0062] В некоторых вариантах осуществления электронного устройства способ дополнительно содержит использование, электронным устройством, измененного пути транспортного средства для модифицирования текущего пути SDC вдоль сегмента дороги.
[0063] В некоторых вариантах осуществления электронного устройства использование данных сегмента дороги и данных опорного пути для определения интервалов безопасного отклонения дополнительно содержит: (i) генерацию, электронным устройством, смоделированного представления транспортного средства для соответственной точки привязки из множества точек привязки на смоделированном представлении сегмента дороги и (ii) определение, электронным устройством, интервалов безопасного отклонения соответственных точек привязки из множества точек привязки на основе соответственного смоделированного представления транспортного средства на смоделированном представлении сегмента дороги.
[0064] В некоторых вариантах осуществления электронного устройства смоделированное представление транспортного средства перекрывает искусственно увеличенную поверхность на смоделированном представлении сегмента дороги, и искусственно увеличенная поверхность больше, чем действительная поверхность, которую транспортное средство перекрывает на сегменте дороги.
[0065] В некоторых вариантах осуществления электронного устройства смоделированное представление транспортного средства перекрывает действительную поверхность на смоделированном представлении сегмента дороги, причем способ дополнительно содержит, как часть определения интервалов безопасного отклонения соответственных точек привязки, вращение смоделированного представления с использованием предварительно определенного угла для генерации увеличенной проекции транспортного средства на сегмент дороги.
[0066] В некоторых вариантах осуществления электронного устройства использование интервалов безопасного отклонения для определения измененного пути содержит: (i) определение, электронным устройством, измененных точек привязки для соответственных интервалов безопасного отклонения, так что данная измененная точка привязки попадает в пределы соответственного интервала безопасного отклонения, и (ii) определение, электронным устройством, измененного пути как представляющего собой последовательность измененных точек привязки.
[0067] В некоторых вариантах осуществления электронного устройства данная измененная точка привязки соответствует середине соответственного безопасного интервала.
[0068] В некоторых вариантах осуществления электронного устройства последовательность измененных точек привязки содержит полилинию.
[0069] В некоторых вариантах осуществления электронного устройства, электронное устройство дополнительно выполнено с возможностью задавания множества точек привязки.
[0070] В некоторых вариантах осуществления электронного устройства электронное устройство задает множество точек привязки на основе по меньшей мере скорости транспортного средства.
[0071] В контексте настоящего описания "сервер" представляет собой компьютерную программу, которая работает на подходящих аппаратных средствах и способна принимать запросы (например, от клиентских устройств) по сети и выполнять эти запросы или вызывать выполнение этих запросов. Аппаратные средства могут быть реализованы как один физический компьютер или одна физическая компьютерная система, но ничто из этого не является обязательным требованием для настоящей технологии. В настоящем контексте, использование выражения "сервер" не должно означать, что каждая задача (например, принятые инструкции или запросы) или любая конкретная задача будет принята, выполнена или побуждаться к выполнению одним и тем же сервером (т.е. одним и тем же программным обеспечением и/или аппаратными средствами); оно должно означать, что любое количество элементов программного обеспечения или аппаратных устройств может быть вовлечено в прием/отправку, выполнение или побуждение выполнения любой задачи или запроса или следствий любой задачи или запроса; и все из этого программного обеспечения и аппаратных средств могут представлять собой один сервер или множество серверов, оба из которых включены в выражение "по меньшей мере один сервер".
[0072] В контексте настоящего описания "электронное устройство" представляет собой любые компьютерные аппаратные средства, которые способны выполнять программное обеспечение, подходящее для релевантной рассматриваемой задачи. В контексте настоящего описания, термин "электронное устройство" подразумевает, что устройство может функционировать как сервер для других электронных устройств и клиентских устройств, однако это не является обязательным требованием для настоящей технологии. Таким образом, некоторые (неограничивающие) примеры электронных устройств включают в себя персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, переключатели и шлюзы. Следует понимать, что в настоящем контексте тот факт, что устройство функционирует как электронное устройство, не означает, что оно не может функционировать как сервер для других электронных устройств. Использование выражения "электронное устройство" не исключает использования множества клиентских устройств при приеме/отправке, выполнении или побуждении выполнения какой-либо задачи или запроса, или следствий какой-либо задачи или запроса, или этапов любого способа, описанного здесь.
[0073] В контексте настоящего описания "клиентское устройство" представляет собой любые компьютерные аппаратные средства, которые способны выполнять программное обеспечение, подходящее для релевантной рассматриваемой задачи. В контексте настоящего описания, в общем термин "клиентское устройство" ассоциирован с пользователем клиентского устройства. Таким образом, некоторые (неограничивающие) примеры клиентских устройств включают в себя персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, переключатели и шлюзы. Следует отметить, что не исключается, что устройство, действующее как клиентское устройство в настоящем контексте, может действовать как сервер для других клиентских устройств. Использование выражения "клиентское устройство" не препятствует использованию множества клиентских устройств в приеме/отправке, выполнении или побуждении выполнения какой-либо задачи или запроса, или следствий какой-либо задачи или запроса, или этапов любого способа, описанного здесь.
[0074] В контексте настоящего описания выражение "информация" включает в себя информацию любого характера или вида, которая может храниться в базе данных. Таким образом, информация включает в себя, но без ограничения, аудиовизуальные произведения (изображения, фильмы, звуковые записи, презентации и т.д.), данные (данные местоположения, числовые данные и т.д.), текст (мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[0075] В контексте настоящего описания выражение "компонент программного обеспечения" предназначено включать в себя программное обеспечение (подходящее для конкретного контекста аппаратных средств), которое является необходимым и достаточным для достижения конкретной рассматриваемой функции(й).
[0076] В контексте настоящего описания выражение "компьютерный носитель хранения информации" (также называемый "носителем хранения") предназначен, чтобы включать в себя носители любого характера и вида, включая, без ограничения, RAM, ROM, диски (CD-ROM, DVD, флоппи-диски, жесткие диски и т.д.), USB-ключи, твердотельные накопители, накопители на магнитной ленте и т.д. Множество компонентов может комбинироваться для формирования компьютерных носителей хранения информации, включая два или более компонентов носителей одного и того же типа и/или два или более компонентов носителей разных типов.
[0077] В контексте настоящего описания "база данных" представляет собой любую структурированную совокупность данных, независимо от ее конкретной структуры, программного обеспечения управления базой данных или компьютерных аппаратных средств, на которых данные хранятся, реализуются или иным образом предоставляются для использования. База данных может находиться на тех же самых аппаратных средствах, что и процесс, который хранит или использует информацию, сохраненную в базе данных, или она может находиться на отдельных аппаратных средствах, таких как выделенный сервер или множество серверов.
[0078] В контексте настоящего описания слова "первый", "второй", "третий" и т.д. были использованы как прилагательные только в целях обеспечения возможности различения между существительными, которые они модифицируют, друг от друга, а не в целях описания какого-либо конкретного отношения между этими существительными. Таким образом, например, следует понимать, что использование терминов "первая база данных" и "третий сервер" не подразумевает какой-либо конкретный порядок, тип, хронологию, иерархию или ранжирование (например) среди/между серверами, а также их использование (самостоятельно) не подразумевает, что некоторый "второй сервер" должен обязательно существовать в некоторой данной ситуации. Дополнительно, как обсуждается здесь в других контекстах, ссылка на "первый" элемент и "второй" элемент не препятствует тому, что два элемента представляют собой тот же самый действительный реальный элемент. Таким образом, например, в некоторых примерах, "первый" сервер и "второй" сервер могут представлять те же самые компоненты программного обеспечения и/или аппаратных средств, в других случаях они могут представлять собой разные компоненты программного обеспечения и/или аппаратных средств.
[0079] Каждая из реализаций настоящей технологии имеют по меньшей мере одну из вышеупомянутых целей и/или аспектов, но не обязательно имеет все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые возникли в результате попытки достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или могут удовлетворять другим целями, не изложенным конкретно здесь.
[0080] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут очевидны из следующего описания, сопровождающих чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[0081] Эти и другие признаки, аспекты и преимущества настоящей технологии будут более понятны, принимая во внимание следующее описание, прилагаемую формулу изобретения и сопровождающие чертежи, где:
[0082] Фиг. 1 изображает схематичную диаграмму примерной компьютерной системы для реализации определенных вариантов осуществления систем и/или способов настоящей технологии.
[0083] Фиг. 2 изображает сетевую компьютерную среду, подходящую для использования с некоторыми реализациями настоящей технологии.
[0084] Фиг. 3 изображает смоделированное представление сегмента дороги, транспортного средства из сетевой компьютерной среды согласно фиг. 2 и опорного пути для транспортного средства через сегмент дороги, в соответствии с по меньшей мере некоторыми вариантами осуществления настоящей технологии.
[0085] Фиг. 4 изображает процедуру верификации, выполняемую электронным устройством сетевой компьютерной среды согласно фиг. 2 для первой точки привязки опорного пути согласно фиг. 3, в соответствии с по меньшей мере некоторыми вариантами осуществления настоящей технологии.
[0086] Фиг. 5 изображает коридор безопасного отклонения, который электронное устройство сетевой компьютерной среды согласно фиг. 2 выполнено с возможностью определять, в соответствии с по меньшей мере некоторыми вариантами осуществления настоящей технологии.
[0087] Фиг. 6 изображает измененный путь, который электронное устройство сетевой компьютерной среды согласно фиг. 2 выполнено с возможностью определять для транспортного средства сетевой компьютерной среды согласно фиг. 2 для движения через сегмент дороги, в соответствии с по меньшей мере некоторыми вариантами осуществления настоящей технологии.
[0088] Фиг. 7 представляет собой схематичную блок-схему способа изменения опорного пути, ассоциированного с транспортным средством, в соответствии с по меньшей мере некоторыми вариантами осуществления настоящей технологии.
[0089] Фиг. 8 изображает электронное устройство, которое используется в сетевой компьютерной среде согласно фиг. 2 по меньшей мере в некоторых реализациях настоящей технологии.
[0090] Фиг. 9 изображает альтернативное представление опорного пути согласно фиг. 3, коридора безопасного отклонения согласно фиг. 5 и измененного опорного пути согласно фиг. 6, в соответствии по меньшей мере с некоторыми вариантами осуществления настоящей технологии.
Подробное описание
[0091] Примеры и условный язык, как изложено здесь, принципиально предназначены для того, чтобы помогать читателю в понимании принципов настоящей технологии и не ограничивать ее объем такими конкретно изложенными примерами и условиями. Понятно, что специалисты в данной области техники смогут создать различные компоновки, которые, хотя не описаны или не показаны здесь явно, тем не менее воплощают принципы настоящей технологии и включены в ее сущность и объем.
[0092] Более того, для помощи в понимании, следующее описание может описывать относительно упрощенные реализации настоящей технологии. Как будет понятно специалистам в данной области техники, различные реализации настоящей технологии могут быть более сложными.
[0093] В некоторых случаях может также быть изложено то, что считается полезными примерами модификаций настоящей технологии. Это делается только в качестве помощи в понимании, но, вновь, не для задания объема или установления границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области техники сможет создать другие модификации, тем не менее остающиеся в пределах объема настоящей технологии. Дополнительно, если примеры модификаций не были изложены, это не должно интерпретироваться так, что модификации невозможны и/или что описанное представляет собой единственный способ реализации этого элемента настоящей технологии.
[0094] Более того, все положения в настоящем документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры должны включать в себя как структурные, так и функциональные их эквиваленты, независимо от того, известны ли они в настоящем или будут разработаны в будущем. Таким образом, например, специалистам в данной области техники будет понятно, что любые блок-схемы здесь представляют концептуальные представления иллюстративных схем, воплощающих принципы настоящей технологии.
[0095] Аналогично будет понятно, что любые блок-схемы последовательностей операций, блок-схемы процесса, диаграммы переходов состояний, псевдокоды и тому подобное представляют различные процессы, которые могут, по существу, быть представлены в считываемых компьютером носителях и поэтому исполняться компьютером или процессором, независимо от того, показан ли такой компьютер или процессор явно или нет.
[0096] Функции различных элементов, показанных на чертежах, включая любой функциональный блок, обозначенный как "процессор", могут обеспечиваться через использование выделенных аппаратных средств, а также аппаратных средств, способных исполнять программное обеспечение в ассоциации с подходящим программным обеспечением. При обеспечении процессором, функции могут обеспечиваться одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно.
[0097] Более того, явное использование термина "процессор" или "контроллер" не должно пониматься как ссылающееся исключительно на аппаратные средства, способные исполнять программное обеспечение, и может в неявном виде включать в себя, без ограничения, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), постоянную память (ROM) для хранения программного обеспечения, память с произвольным доступа (RAM) и энергонезависимое хранилище. Другие аппаратные средства, обычные и/или персонализированные, могут также быть включены.
[0098] Модули программного обеспечения или просто модули, которые подразумеваются представляющими собой программное обеспечение, могут быть представлены здесь как любая комбинация элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса, и/или текстовое описание. Такие модули могут исполняться аппаратными средствами, которые показаны в явном или в неявном виде.
[0099] С этими введенными фундаментальными положениями, теперь рассмотрим некоторые неограничивающие примеры, чтобы проиллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[0100] Со ссылкой сначала на фиг. 1 изображена компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, причем компьютерная система 100 содержит различные компоненты аппаратных средств, включая один или более одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120, память 130, которая может представлять собой память с произвольным доступом или любой другой тип памяти. Связь между различными компонентами компьютерной системы 100 может обеспечиваться одной или несколькими внутренними и/или внешними шинами (не показаны) (например, шиной PCI, универсальной последовательной шиной, шиной IEEE 1394 “Firewire”, шиной SCSI, шиной Serial-ATA и т.д.), с которыми электронным способом связаны различные компоненты аппаратных средств.
[0101] По меньшей мере в некоторых вариантах осуществления настоящей технологии твердотельный накопитель 120 хранит программные инструкции, подходящие для загрузки в память 130 и исполнения процессором 110 для определения присутствия объекта. Например, программные инструкции могут быть частью приложения управления транспортным средством, исполняемого процессором 110.
[0102] По меньшей мере в некоторых вариантах осуществления настоящей технологии предполагается, что компьютерная система 100 может иметь дополнительные и/или опциональные компоненты, такие как модуль 140 сетевой связи для связи, посредством сети связи (например, сети 240 связи, изображенной на фиг. 2), с другими электронными устройствами и/или серверами, модули локализации (не изображены) и тому подобное.
Сетевая компьютерная среда
[0103] Фиг. 2 иллюстрирует сетевую компьютерную среду 200, подходящую для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, ассоциированное с транспортным средством 220 или ассоциированное с пользователем (не изображен), который может задействовать транспортное средство 220, сервер 235, осуществляющий связь с электронным устройством 210 через сеть 240 связи (например, Интернет или тому подобное, как будет описано более подробно ниже). Опционально, сетевая компьютерная среда 200 может также включать в себя спутник GPS (не изображен), передающий и/или принимающий сигнал GPS на/от электронного устройства 210. Будет понятно, что настоящая технология не ограничена GPS и может использовать технологию позиционирования, отличную от GPS. Следует отметить, что спутник GPS может быть вообще опущен.
[0104] Транспортное средство 220, с которым ассоциировано электронное устройство 210, может содержать любое транспортное средство для досуга или транспортировки, такое как личный или коммерческий автомобиль, грузовик, мотоцикл или тому подобное. Транспортное средство может представлять собой приводимое в действие пользователем или беспилотное транспортное средство. Следует отметить, что конкретные параметры транспортного средства 220 являются неограничивающими, эти конкретные параметры включают в себя: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, габариты транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег в милях, идентификационный номер транспортного средства и размер двигателя.
[0105] Реализация электронного устройства 210 не ограничена конкретно, но в качестве примера, электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, CPU транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет и персональный компьютер, встроенный в транспортное средство 220, и тому подобное. Таким образом, следует отметить, что электронное устройство 210 может или не может быть постоянно ассоциировано с транспортным средством 220. Дополнительно или альтернативно, электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиофон). В некоторых вариантах осуществления, электронное устройство 210 имеет дисплей 270.
[0106] Электронное устройство 210 может содержать некоторые или все из компонентов компьютерной системы 100, изображенной на фиг. 1. В некоторых вариантах осуществления, электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, твердотельный накопитель 120 и память 130. Другими словами, электронное устройство 210 содержит аппаратные средства и/или программное обеспечение и/или прошивку или их комбинацию для определения траектории транспортного средства 220 на данном сегменте дороги с учетом препятствий на нем, как будет описано более подробно ниже.
Сенсорная система
[0107] В неограничивающих вариантах осуществления настоящей технологии, электронное устройство 210 содержит или имеет доступ к сенсорной системе 230. В соответствии с этими вариантами осуществления, сенсорная система 230 может содержать множество сенсоров, позволяющих осуществить различные реализации настоящей технологии. Примеры множества сенсоров включают в себя, но без ограничения: камеры, сенсоры LIDAR (лидары) и сенсоры RADAR (радары) и т.д. Сенсорная система 230 функционально связана с процессором 110 для передачи захваченной информации на процессор 110 для ее обработки, как будет описано более подробно ниже.
[0108] Сенсорная система 230 может быть установлена на внутренней верхней части лобового стекла транспортного средства 220, но другие местоположения входят в объем настоящего раскрытия, например, на заднем стекле, боковых стеклах, капоте, крыше, решетке радиатора или переднем бампере транспортного средства 220. В некоторых неограничивающих вариантах осуществления настоящей технологии, сенсорная система 230 может быть установлена в специальном корпусе (не изображен), установленном на крыше транспортного средства 220.
[0109] Дополнительно пространственное размещение сенсорной системы 230 может быть спроектировано с учетом ее конкретной технической конфигурации, конфигурации корпуса, погодных условий области, где должно использоваться транспортное средство 220 (таких как частые дожди, снег и т.д.), или тому подобного.
[0110] В неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может содержать сенсор, выполненный для захвата изображения окружающей области 260. В этом отношении сенсорная система 230 может представлять собой камеру или их множество (не изображено отдельно).
[0111] То, как реализована камера, не ограничено конкретно. Например, в одном конкретном неограничивающем варианте осуществления настоящей технологии камера может быть реализована как монокамера с разрешением, достаточным для обнаружения объектов на предопределенных расстояниях примерно до 30 м (хотя камеры с другими разрешениями и дальностями входят в объем настоящего раскрытия).
[0112] В некоторых вариантах осуществления настоящей технологии камера (или одна или более камер, которые составляют реализацию сенсорной системы 230) выполнена с возможностью захвата предопределенной части окружающей области 260 вокруг транспортного средства 220. В некоторых вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серию изображений), которое представляет приблизительно 90 градусов окружающей области 260 вокруг транспортного средства 220 вдоль пути движения транспортного средства 220.
[0113] В других вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серию изображений), которое представляет приблизительно 180 градусов окружающей области 260 вокруг транспортного средства 220 вдоль пути движения транспортного средства 220. В других дополнительных вариантах осуществления настоящей технологии, камера выполнена с возможностью захвата изображения (или серию изображений), которое представляет приблизительно 360 градусов окружающей области 260 вокруг транспортного средства 220 вдоль пути движения транспортного средства 220 (другими словами, полную картину окружающей области вокруг транспортного средства 220).
[0114] В конкретном неограничивающем примере камера может быть камерой типа доступного от FLIR Integrated Imaging Solutions Inc., 12051 Riverside Way, Ричмонд, BC, V6W 1K7, Канада. Должно быть понятно, что камера может быть реализована в любом другом подходящем оборудовании.
[0115] В неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может дополнительно содержать прибор LIDAR (не изображен отдельно). Lidar (Light Detection и Ranging) означает обнаружение и определение дальности с помощью света. Ожидается, что специалисту в данной области техники будет понятна функциональность прибора LIDAR ( лидарного прибора), но говоря кратко, передатчик (не изображен) лидарного прибора отправляет лазерный импульс, и световые частицы (фотоны) рассеиваются назад к приемнику (не изображен) лидарного прибора. Фотоны, которые возвращаются в приемник, собираются телескопом и подсчитываются как функция времени. Используя скорость света (~3×108 м/с), процессор 110 может затем вычислить, какое расстояние прошли фотоны (при двустороннем распространении). Фотоны могут рассеиваться назад от множества разных объектов, окружающих транспортное средство 220, таких как другие частицы (аэрозоли или молекулы) в атмосфере, другая карта, стационарные объекты или потенциальные препятствия перед транспортным средством 220.
[0116] В конкретном неограничивающем примере лидарный прибор, содержащийся в сенсорной системе 230, может быть реализован как сенсор на основе лидара, который может быть типа, доступного от Velodyne LiDAR, Inc. 5521 Hellyer Avenue, Сан-Хосе, CA 95138, США. Должно быть понятно, что лидарный прибор может быть реализован в любом другом подходящем оборудовании.
[0117] В некоторых вариантах осуществления настоящей технологии лидарный прибор, содержащийся в сенсорной системе 230, может быть реализован как множество сенсоров на основе лидара, например, три или любое другое подходящее количество.
[0118] В неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может дополнительно содержать прибор обнаружения и определения дальности с помощью радиоволн (Radio Detection and Ranging, RADAR) (не изображен отдельно). Говоря кратко, прибор RADAR (радарный прибор) представляет собой прибор обнаружения, использующий радиоволны для определения дальности, угла и/или скорости объектов. Радарный прибор включает в себя передатчик, производящий электромагнитные волны, антенну, используемую для передачи и приема электромагнитных волн, приемник и процессор для определения свойств обнаруженных объектов.
[0119] В альтернативных вариантах осуществления настоящей технологии может иметься отдельная антенна для приема волн и отдельная антенна для передачи волн. Процессор, используемый для определения свойств окружающих объектов, может представлять собой процессор 110.
[0120] В некоторых вариантах осуществления настоящей технологии радарный прибор, используемый в системе 230 датчиков, может содержать сенсоры на основе радара большой дальности, средней дальности и малой дальности. В качестве неограничивающего примера, сенсор на основе радара большой дальности может использоваться для адаптивного круиз-контроля, автоматического экстренного торможения и предупреждения о прямом столкновении, в то время как сенсоры на основе радаров средней и малой дальности могут использоваться для помощи при парковке, предупреждения о движении в пересекающем направлении, помощи на перекрестках и обнаружении слепой зоны.
[0121] В конкретном неограничивающем примере радарный прибор, содержащийся в сенсорной системе 230, может быть типа, доступного от Robert Bosch GmbH Robert-Bosch-Platz 1, 70839 Герлинген, Германия. Следует понимать, что радарный прибор может быть реализован в любом другом подходящем оборудовании.
[0122] В некоторых неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может использоваться процессором 110 для калибровки изображения. Например, с использованием изображения, захваченного камерой, и облака точек лидара, захваченного лидарныйм прибором, процессор 110 выполнен с возможностью идентификации, что данная область изображения соответствует данной области облака точек лидара, захваченного лидарным прибором. В других вариантах осуществления настоящей технологии сенсорная система 230 откалибрована так, что для изображения, захваченного камерой, облака точек лидара, захваченного лидарным прибором, и данных радара, захваченных радарным прибором, процессор 110 выполнен с возможностью идентификации, что данная область изображения соответствует данной области облака точек лидара и данным радара.
[0123] В неограничивающих вариантах осуществления настоящей технологии транспортное средство 220 дополнительно содержит или имеет доступ к другим сенсорам (не изображены отдельно). Другие сенсоры включают в себя одно или более из: инерциального измерительного блока (IMU), прибора глобальной спутниковой навигационной системы (GNSS), радаров путевой скорости, сенсоров на основе ультразвуковых сонаров, одометрических сенсоров, включая акселерометры и гироскопы, механических сенсоров наклона, магнитного компаса и других сенсоров, обеспечивающих эксплуатацию транспортного средства 220.
[0124] В качестве неограничивающего примера IMU может быть закреплен в транспортном средстве 220 и содержит три гироскопа и три акселерометра для обеспечения данных о вращательном движении и линейном движении транспортного средства 220, которые могут использоваться для вычисления движения и положения транспортного средства 220.
Сеть связи
[0125] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи или тому подобное. Следует понимать, что реализации сети 240 связи приведены только для иллюстрации. То, как реализована линия связи (не пронумерована отдельно) между электронным устройством 210 и сетью 240 связи, будет зависеть, помимо прочего, от того, как реализовано электронное устройство 210. Только в качестве примера, но не ограничения, в тех неограничивающих вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может быть реализована как линия беспроводной связи. Примеры линий беспроводной связи включают в себя, но без ограничения, линию сети связи 3G, линию сети связи 4G и тому подобное. Сеть 240 связи может также использовать беспроводное соединение с сервером 235.
Сервер
[0126] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован как традиционный компьютерный сервер и может содержать некоторые или все из компонентов компьютерной системы 100 согласно фиг. 1. В одном неограничивающем примере, сервер 235 реализован как Сервер Dell™ PowerEdge™, применяющий операционную систему Microsoft™ Windows Server™, но может также быть реализован в любых других подходящих аппаратных средствах, программном обеспечении и/или прошивке или их комбинации. В изображенных неограничивающих вариантах осуществления настоящей технологии, сервер является одиночным сервером. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны), функциональность сервера 235 может быть распределена и может быть реализована множеством серверов.
[0127] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может осуществлять связь с сервером 235 для приема одного или более обновлений. Обновления могут представлять собой, но без ограничения, обновления программного обеспечения, обновления карты, обновления маршрутов, обновления погоды и тому подобное.
[0128] В некоторых вариантах осуществления настоящей технологии процессор 110 может также быть выполнен с возможностью передачи на сервер 235 определенные операционные данные, такие как пройденные маршруты, данные трафика, данные производительности и тому подобное. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованными и/или сохраняющими анонимность.
Хранилище
[0129] На фиг. 2, также изображено хранилище 250, коммуникативно соединенное с сервером 235. В некоторых вариантах осуществления, однако, хранилище 250 может быть коммуникативно связано с электронным устройством 210 и/или может быть реализовано в электронном устройстве 210 и/или может быть коммуникативно связано с любым другим процессором сетевой компьютерной среды 200.
[0130] По меньшей мере в некоторых вариантах осуществления предполагается, что хранилище 250 может использоваться сервером 235, электронным устройством 210 и/или любым другим процессором сетевой компьютерной среды 200 в качестве устройства памяти для хранения информации. Хранилище 250 выполнено с возможностью хранения информации, извлеченной, определенной и/или сгенерированной процессором 110 сервера 235 и/или электронного устройства 210. В общем хранилище 250 может принимать данные от процессора 110, которые были сгенерированы процессором 110 во время обработки, для их временного и/или постоянного хранения, и может предоставлять сохраненные данные на процессор 110 для их использования. Предполагается, что хранилище 250 может быть разделено на несколько распределенных хранилищ для обеспечения, например, отказоустойчивой системы хранения, без отклонения от объема настоящей технологии.
[0131] Следует отметить, что по меньшей мере в некоторых вариантах осуществления настоящей технологии хранилище 250 может быть реализовано локально на электронном устройстве 210 и/или сервере 235 (например, на локальной памяти). Также подразумевается, однако, что хранилище 250 может быть реализовано удаленно от электронного устройства 210 и/или сервера 235 (например, на удаленной памяти).
Электронное устройство
[0132] В широком смысле слова, электронное устройство 210 может быть выполнено с возможностью управления действием или запуска иным образом управления действием транспортного средства 220. В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть реализовано аналогично тому, как реализовано электронное устройство 800 согласно фиг. 8.
[0133] Более конкретно, электронное устройство 210 может быть выполнено с возможностью управления действием или запуска иным образом управления действием транспортного средства 220 при приближении поворота и/или когда транспортное средство 220 должно выполнить маневр поворота.
[0134] В одном примере электронное устройство 210 может быть выполнено с возможностью определения данных управления действием для управления действием транспортного средства 220, когда транспортное средство 220 приближается к данному повороту на сегменте дороги. В другом примере электронное устройство 210 может также быть выполнено с возможностью определения данных управления действием для управления действием транспортного средства 220, когда транспортное средство 220 выполняет маневр поворота. Чтобы лучше проиллюстрировать это, теперь будет сделана ссылка на фиг. 3, изображающую представление вида 300 сверху транспортного средства 220, приближающегося к повороту.
[0135] Предполагается, что по меньшей мере в одном неограничивающем варианте осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью моделирования и визуализации вида 300 сверху на дисплее 270, например. Однако в других неограничивающих вариантах осуществления настоящей технологии представление вида 300 сверху генерируется только в целях обработки, без какого-либо его отображения.
[0136] Электронное устройство 210 может быть выполнено с возможностью получения данных сегмента дороги для генерации смоделированного представления сегмента 302 дороги. В широком смысле слова, данные сегмента дороги, полученные электронным устройством 210, указывают ограничения сегмента 302 дороги, по которому движется транспортное средство 220.
[0137] Следует отметить, что ограничения сегмента 302 дороги могут принимать множество форм и как таковые могут содержать по меньшей мере одно из (i) физических ограничений на сегменте дороги и (ii) ограничений правил дорожного движения на сегменте 302 дороги.
[0138] В широком смысле слова физические ограничения сегмента 302 дороги могут включать в себя один или более параметров, которые задают геометрию сегмента 302 дороги. Например, физические ограничения сегмента 302 дороги могут включать в себя один или более радиусов сегмента 302 дороги (которые могут использоваться, например, для параметризации поворота, ассоциированного с сегментом 302 дороги), одно или более расстояний (таких, например, как ширины и/или длины), ассоциированных с частями сегмента 302 дороги, одно или более положений (таких, например, как положения различных объектов и/или границ), ассоциированных с сегментом 302 дороги, один или более углов, ассоциированных с сегментом 302 дороги, и тому подобное. В некоторых неограничивающих вариантах осуществления настоящей технологии, предполагается, что данные, указывающие физические ограничения, могут быть получены электронным устройством 210 от сенсорной системы 230, как объяснено выше.
[0139] В широком смысле ограничения правил дорожного движения сегмента 302 дороги могут включать в себя одно или более правил дорожного движения, которые регулируют трафик на сегменте 302 дороги. Например, ограничения правил дорожного движения могут включать в себя дорожные знаки, одно или более разметок полос и тому подобное. В некоторых неограничивающих вариантах осуществления настоящей технологии предполагается, что данные, указывающие ограничения правил дорожного движения, могут быть получены электронным устройством 210 от сенсорной системы 230 и/или с сервера 235, как пояснено выше.
[0140] В некоторых случаях электронное устройство 210 может применять данные, указывающие ограничения правил дорожного движения, и данные, указывающие физические ограничения комплементарным образом во время обработки данных. Например, данные, указывающие физические границы полосы, и данные, указывающие, что эти границы полосы предоставлены для регулирования трафика в полосе (например, чтобы избегать столкновений), могут использоваться электронным устройством 210, так что электронное устройство 210 имеет доступ к информации касательно (i) положения данной границы полосы на сегменте 302 дороги, и (ii) что запрещено пересекать данную границу полосы при движении в этой полосе.
[0141] Предполагается, что электронное устройство 210 может быть выполнено с возможностью генерирования смоделированного представления сегмента 302 дороги, как изображено на фиг. 3, на основе данных, указывающих ограничения сегмента 302 дороги. Как понятно из иллюстрации на фиг. 3, сегмент 302 дороги имеет полосу 304, которая задана левой границей 306 и правой границей 308. В этом случае, можно сказать, что левая граница 306 и правая граница 308 полосы 304 являются частью ограничений сегмента 302 дороги и позволяют осуществлять регулирование трафика на сегменте 302 дороги.
[0142] Также на фиг. 3 изображена ограничительная рамка 350, которая представляет собой смоделированное представление транспортного средства 220. Следует отметить, что электронное устройство 210 может быть выполнено с возможностью генерирования ограничительной рамки 350 на основе данных, ассоциированных с транспортным средством 220, таких как данные, указывающие геометрию, конфигурацию и размер транспортного средства 220.
[0143] Например, ограничительная рамка 350, изображенная на фиг. 3, перекрывает по существу ту же самую площадь на смоделированном представлении сегмента 302 дороги, что и площадь поверхности, перекрытая транспортным средством 220 на сегменте 302 дороги. В том же самом примере, электронное устройство 210 может быть выполнено с возможностью генерирования смоделированного представления заднего моста 355 транспортного средства 220 в ограничительной рамке 350 и смоделированного представления оси 356, проходящей через середину заднего моста 355 транспортного средства 220. Следует отметить, что ось 356 продолжается вверх и перпендикулярно поверхности земли, по которой движется транспортное средство 220.
[0144] Таким образом, можно сказать, что электронное устройство 210 может быть выполнено с возможностью генерирования смоделированного представления транспортного средства 220 посредством генерации ограничительной рамки 350, заднего моста 355 и оси 356 на основе данных, ассоциированных с транспортным средством 220. Следует отметить, что в некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью использования (i) смоделированного представления переднего места вместе со смоделированным представлением заднего моста 355 или вместо него, (ii) смоделированного представления оси переднего моста вместе со смоделированным представлением оси 356 или вместо него в контексте настоящей технологии и в зависимости, помимо прочего, от геометрии, конфигурации (например, передний привод, задний привод, 4×4) и размера транспортного средства 220.
[0145] В некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью реализации модуля моделирования ограничительной рамки. Например, модуль моделирования ограничительной рамки может быть выполнен с возможностью генерирования ограничительной рамки 350, как описано выше. В другом примере модуль моделирования ограничительной рамки может также быть выполнено с возможностью генерирования данной ограничительной рамки для транспортных средств, соседних транспортному средству 220, аналогично тому, как модуль моделирования ограничительной рамки выполнено с возможностью генерирования ограничительной рамки 350.
[0146] В некоторых неограничивающих вариантах осуществления настоящей технологии предполагается, что электронное устройство 210 может быть выполнено с возможностью получения данных опорного пути, которые указывают опорный путь 320. Следует отметить, что опорный путь 320 представляет собой путь вдоль сегмента 302 дороги, которому, по оценкам, должно следовать транспортное средство 220.
[0147] В некоторых случаях данные опорного пути могут быть получены электронным устройством 210, например, с сервера 235. В других случаях электронное устройство 210 может быть выполнено с возможностью получать данные опорного пути посредством генерации опорного пути 320.
[0148] Например, электронное устройство 210 может быть выполнено с возможностью генерирования опорного пути 320 путем задания множества точек привязки (не пронумерованы) вдоль сегмента 302 дороги. Как проиллюстрировано, множество точек привязки включает в себя первую точку 321 привязки, вторую точку 322 привязки, третью точку 323 привязки и четвертую точку 324 привязки вдоль сегмента 302 дороги.
[0149] В некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью задавать точки привязки данного опорного пути как геометрические точки вдоль центральной линии полосы, в которой транспортное средство 220 движется в текущее время. Например, электронное устройство 210 может быть выполнено с возможностью определять первую точку 321 привязки, вторую точку 322 привязки, третью точку 323 привязки и четвертую точку 324 привязки как множество геометрических точек вдоль центральной линии полосы 304.
[0150] Предполагается, что электронное устройство 210 может быть выполнено с возможностью определять центральную линию полосы 304 путем идентификации центральной линии как представляющей собой срединную линию между левой границей 306 и правой границей 308 (например, на основе физических ограничений сегмента 302 дороги), и затем может быть выполнено с возможностью определять множество точек привязки вдоль этой срединной линии.
[0151] Следует отметить, что опорный путь 320 может иногда упоминаться как опорный путь “по умолчанию” транспортного средства 220, поскольку предполагается, что при нормальных условиях транспортное средство 220 должно двигаться вдоль центральной линии данной полосы по умолчанию. Разумеется, разработчики настоящей технологии отдавали себе отчет, что при нормальных условиях, например, когда транспортное средство 220 движется вдоль прямой полосы, транспортное средство 220 должно двигаться вдоль центральной линии этой полосы в целях безопасности. Иными словами, предполагается, что при нормальных условиях транспортное средство 220 должно двигаться вдоль текущей полосы, так что ось 356 выровнена с центральной линией текущей полосы.
[0152] Следует отметить, что электронное устройство 210 может быть выполнено с возможностью определять множество точек привязки с разными расстояниями между соответственными точками привязки. Предполагается, что расстояния между соответственными точками привязки могут предварительно выбираться электронным устройством 210 разными способами для данного применения.
[0153] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может реализовывать модуль отслеживания геометрии полосы или устройство отслеживания геометрии полосы. Предполагается, что устройство отслеживания геометрии полосы электронного устройства 210 может быть выполнено с возможностью приема данных о полосе 304 и определения на основе этих данных центральную линию полосы 304. В некоторых случаях центральную линию полосы 304 можно вычислять устройством отслеживания геометрии полосы в форме полилинии, имеющей множество вершин. Предполагается, что множество вершин можно использовать в качестве множества точек привязки соответственного опорного пути по умолчанию.
[0154] Однако, разработчики настоящей технологии также выяснили, что движение вдоль центральной линии данной полосы не всегда является лучшим и/или наиболее безопасным вариантом для транспортного средства 220. Например, как проиллюстрировано на фиг. 3, некоторые полосы, такие как полоса 304, не являются прямыми, но представляют собой полосы поворота и могут включать в себя изгиб (угол которого зависит от геометрии конкретной дороги, разумеется). В таких случаях, когда транспортное средство 220 должно двигаться по сегменту 302 дороги, имеющему полосу 304 поворота, если электронное устройство 210 выполнено с возможностью ы запускать транспортное средство 220 для движения вдоль опорного пути 320, по меньшей мере части транспортного средства 220 могут пересекать левую границу 306 и/или правую границу 308 (например, выходить за пределы ограничений сегмента 302 дороги). Транспортное средство 220, по меньшей мере частично пересекающее границы полосы 304, нарушает правила дорожного движения и может быть небезопасным для пассажиров и/или других транспортных средств, движущихся вблизи транспортного средства 220.
[0155] Следует отметить, что в сценарии, изображенном на фиг. 3, предполагается, что по меньшей мере части транспортного средства 220 будут пересекать левую границу 306, если транспортное средство 220 следует опорному пути 320. Однако, как пояснено выше, в зависимости от геометрии, конфигурации и/или размера транспортного средства 220, по меньшей мере части транспортного средства 220 могут, альтернативно или в дополнение к пересечению левой границы 306, пересекать правую границу 308 во время поворота налево. Такая ситуация может возникнуть, когда транспортное средство 220 реализовано, например, как школьный автобус, где задняя часть транспортного средства 220 выступает назад от заднего моста транспортного средства 220 больше, чем изображено в сценарии на фиг. 3.
[0156] По меньшей мере по этим причинам разработчики настоящей технологии разработали способы и системы, которые позволяют изменить данный опорный путь, ассоциированный с транспортным средством 220, и тем самым сгенерировать данный измененный путь, который позволяет транспортному средству 220 находиться в пределах границ данной полосы поворота.
[0157] Как будет понятно из описания дополнительно ниже, электронное устройство 210 может быть выполнено с возможностью определять коридор 550 безопасного отклонения (см. фиг. 5) в полосе 304, который задает участок полосы 304 (например, сегмента 302 дороги), на котором транспортное средство 220 находится в пределах ограничений сегмента 302 дороги, если транспортное средство 220 движется в коридоре 550 безопасного отклонения. Иными словами, можно сказать, что электронное устройство 210 может быть дополнительно выполнено с возможностью генерировать измененный путь 620 (см. фиг. 6), который находится в пределах коридора 550 безопасного отклонения, так что если транспортное средство 220 движется вдоль измененного пути 620 (например, ось 356 транспортного средства 220 выровнена с измененным путем 620), транспортное средство 220 будет находиться в пределах ограничений сегмента 302 дороги (например, не будет пересекать левую границу 306 или правую границу 308).
[0158] Теперь будет в свою очередь описано то, как выполнено электронное устройство 210, чтобы определять коридор 550 безопасного отклонения и измененный путь 620.
[0159] Во время процесса генерации коридора 550 безопасного отклонения, электронное устройство 210 может быть выполнено с возможностью выполнять процедуру верификации привязки за привязкой для определения, может ли транспортное средство 220 безопасно отклониться от соответственной точки привязки опорного пути 320. Другими словами, электронное устройство 210 может быть выполнено с возможностью определять для каждой точки привязки опорного пути 320 соответственный интервал безопасного отклонения, который указывает приемлемое отклонение транспортного средства 220 от опорного пути 320, так что если транспортное средство 220 находится в пределах данного интервала безопасного отклонения, транспортное средство 220 попадает в пределы ограничений сегмента 302 дороги.
[0160] Со ссылкой на фиг. 4 изображено представление 400 электронного устройства 210, выполняющего процедуру верификации для первой точки 321 привязки. С этой целью, как показано на фиг. 4, электронное устройство 210 может быть выполнено с возможностью моделировать ситуацию, где ограничительная рамка 350 расположена на сегменте 302 дороги так, что ось 356 совмещена с первой точкой 321 привязки. В результате, электронное устройство 210 может быть выполнено с возможностью определения пары расстояний безопасного отклонения для первой точки 321 привязки, включая расстояние 450 безопасного отклонения и расстояние 460 безопасного отклонения.
[0161] Следует отметить, что расстояние 450 безопасного отклонения представляет собой кратчайшее расстояние между любой точкой левой границы 306 и любой точкой ограничительной рамки 350, когда ограничительная рамка 350 позиционирована так, что ось 356 совмещена с первой точкой 321 привязки и что направление движения вперед является тангенциальным к опорному пути 320 в первой точке 321 привязки. Также расстояние 460 безопасного отклонения представляет собой кратчайшее расстояние между любой точкой правой границы 308 и любой точкой ограничительной рамки 350, когда ограничительная рамка 350 позиционирована так, что ось 356 совмещена с первой точкой 321 привязки и что направление движения вперед является тангенциальным к опорному пути 320 в первой точке 321 привязки. Таким образом, можно сказать, что ограничительная рамка 350 может отклоняться на расстояние 450 безопасного отклонения влево и/или на расстояние 460 безопасного отклонения вправо, все еще попадая в пределы ограничений сегмента 302 дороги.
[0162] Следует отметить, что электронное устройство 210 может быть выполнено с возможностью определения пары расстояний безопасного отклонения для каждой точки привязки опорного пути 320 аналогично тому, как электронное устройство 210 выполнено с возможностью определения пары расстояний 450 и 460 безопасного отклонения для первой точки 321 привязки.
[0163] Со ссылкой на фиг. 5, во время процесса генерации коридора 550 безопасного отклонения, электронное устройство 210 может быть выполнено с возможностью определения соответственного интервала безопасного отклонения для соответственной точки привязки на основе соответственной пары расстояний безопасного отклонения. Например, электронное устройство 210 может быть выполнено с возможностью определения первого интервала 551 безопасного отклонения для первой точки 321 привязки на основе пары расстояний 450 и 460 безопасного отклонения.
[0164] Первый интервал 551 безопасного отклонения ограничен парой границ безопасного отклонения, включая границу 561 безопасного отклонения и границу 571 безопасного отклонения. Следует отметить, что электронное устройство 210 может быть выполнено с возможностью определения границы 561 отклонения как представляющую собой данную точку на сегменте 302 дороги, которая отделена от первой точки 321 привязки расстоянием 450 безопасного отклонения. Аналогично электронное устройство 210 может быть выполнено с возможностью определения границы 571 безопасного отклонения как представляющую собой данную точку на сегменте 302 дороги, которая отделена от первой точки 321 привязки расстоянием 460.
[0165] Иными словами, электронное устройство 210 может быть выполнено с возможностью определения пары границ 561 и 571 безопасного отклонения первого интервала 551 безопасного отклонения так, что если ось 356 транспортного средства 220 позиционирована где-либо между парой границ 561 и 571 безопасного отклонения, транспортное средство 220 будет находиться в пределах ограничений сегмента 302 дороги.
[0166] Электронное устройство 210 может быть выполнено с возможностью определять (i) второй интервал 552 безопасного отклонения для второй точки 322 привязки, (ii) третий интервал 553 безопасного отклонения для третьей точки 323 привязки и (iii) четвертый интервал 554 безопасного отклонения для четвертой точки 324 привязки, аналогично тому, как электронное устройство 210 выполнено с возможностью определения первого интервала 551 безопасного отклонения для первой точки 321 привязки. Иными словами, электронное устройство 210 может быть выполнено с возможностью определения (i) пары границ 562 и 572 безопасного отклонения для второй точки 322 привязки на основе пары расстояний безопасного отклонения, ассоциированных со второй точкой 322 привязки, (ii) пару границ 563 и 573 безопасного отклонения для третьей точки 323 привязки на основе пары расстояний безопасного отклонения, ассоциированных с третьей точкой 323 привязки, (i) пару границ 564 и 574 безопасного отклонения для четвертой точки 324 привязки на основе пары расстояний безопасного отклонения, ассоциированных с четвертой точкой 324 привязки, аналогично тому, как электронное устройство 210 выполнено с возможностью определения пары границ 561 и 571 безопасного отклонения для первой точки 321 привязки на основе пары расстояний 450 и 460 безопасного отклонения.
[0167] Следует отметить, что данная точка привязки может или не может попадать в пределы соответственного интервала безопасного отклонения, и то, попадает ли данная точка привязки в пределы соответственного интервала безопасного отклонения, будет зависеть, помимо прочего, от данных сегмента дороги (например, ограничений сегмента 302 дороги) и данных транспортного средства (например, геометрии, конфигурации и размера транспортного средства 220). Например, как показано на фиг. 5, первая точка 321 привязки и четвертая точка 324 привязки попадают в пределы первого интервала 551 безопасного отклонения и четвертого интервала 554 безопасного отклонения, соответственно. Однако вторая точка 322 привязки не попадает в пределы второго интервала 552 безопасного отклонения, и третья точка привязки не попадает в пределы третьего интервала 553 безопасного отклонения.
[0168] Например, вторая точка 322 привязки не попадает в пределы второго интервала 552 безопасного отклонения, поскольку когда ограничительная рамка 350 позиционирована так, что ось 356 совмещена с второй точкой 322 привязки, и так, что направление движения вперед является тангенциальным к опорному пути 320 во второй точке 322 привязки, ограничительная рамка 350 по меньшей мере частично перекрывает левую границу 306. Таким образом, можно сказать, что расстояние безопасного отклонения между (i) левой границей 306 и (ii) ограничительной рамкой 350 является отрицательным, когда ограничительная рамка 350 позиционирована так, что ось 356 совмещена с второй точкой 322 привязки, и так, что направление движения вперед является тангенциальным к опорному пути 320 во второй точке 322 привязки. В результате, электронное устройство 210 может быть выполнено с возможностью определять, на основе этого отрицательного расстояния безопасного отклонения, что граница 562 безопасного отклонения должна быть позиционирована справа от второй точки 322 привязки, и, таким образом, вторая точка 322 привязки не попадает в пределы второго интервала 552 безопасного отклонения.
[0169] В целом, можно сказать, что во время процесса генерации коридора 550 безопасного отклонения, электронное устройство 210 может быть выполнено с возможностью, для каждой точки привязки опорного пути 320, (i) определять соответственную пару расстояний безопасного отклонения, такую как пара расстояний 450 и 460 безопасного отклонения для первой точки 321 привязки, (ii) определять соответственный интервал безопасного отклонения на основе соответственной пары расстояний безопасного отклонения, такой как первый интервал 551 безопасного отклонения на основе пары расстояний 450 и 460 безопасного отклонения для первой точки 321 привязки, и (iii) определять коридор 550 безопасного отклонения как участок сегмента 302 дороги, который включен в соответственные интервалы безопасного отклонения, такие как первый интервал 551 безопасного отклонения, второй интервал 552 безопасного отклонения, третий интервал 553 безопасного отклонения и четвертый интервал 554 безопасного отклонения.
[0170] Следует отметить, что если ось 356 ограничительной рамки 350 позиционирована где-либо в коридоре 550 безопасного отклонения и так, что направление движения вперед является тангенциальным к опорному пути 320 во второй точке 322 привязки, транспортное средство 220 будет попадать в пределы ограничений сегмента 302 дороги, или другими словами, не будет пересекать левую границу 306 и/или правую границу 308 полосы 304 на сегменте 302 дороги. Следует также отметить, что, как пояснено выше, по меньшей мере некоторые из точек привязки опорного пути 320 могут попадать в пределы коридора 550 безопасного отклонения, в то время как другие могут выходить за пределы коридора 550 безопасного отклонения.
[0171] Предполагается, что в некоторых вариантах осуществления настоящей технологии, электронное устройство 210 может запускаться для определения измененного пути 620, если по меньшей мере одна точка привязки опорного пути 320 выходит за пределы коридора 550 безопасного отклонения.
[0172] В других вариантах осуществления, однако, даже если все из точек привязки опорного пути 320 попадают в пределы коридора 550 безопасного отклонения, электронное устройство 210 может также запускаться для определения измененного пути 620. Например, если точки привязки опорного пути 320 все находились в коридоре 550 безопасного отклонения, это означает, что если транспортное средство 220 следует такому опорному пути 320 на сегменте 302 дороги, транспортное средство 220 будет находиться в пределах ограничений сегмента 302 дороги. Тем не менее, в таком случае, электронное устройство 210 может все же запускаться для определения измененного пути 620 для повышения безопасности маневра, поскольку измененный путь 620 может использоваться, чтобы направлять транспортное средство 220 так, чтобы увеличивать расстояния между левой и правой границами 306 и 308 сегмента 302 дороги и транспортным средством 220 по сравнению с вождением транспортного средства 220 вдоль опорного пути 320.
[0173] Далее со ссылкой на фиг. 6 будет описано то, как электронное устройство 210 может быть выполнено с возможностью определять измененный путь 620. Электронное устройство 210 может быть выполнено с возможностью использовать первый интервал 551 безопасного отклонения, второй интервал 552 безопасного отклонения, третий интервал 553 безопасного отклонения и четвертый интервал 554 безопасного отклонения для определения соответственных измененных точек привязки измененного пути 620. Другими словами, электронное устройство 210 может быть выполнено с возможностью использовать:
- первый интервал 551 безопасного отклонения, чтобы определять первую измененную точку 621 привязки измененного пути 620;
- второй интервал 552 безопасного отклонения, чтобы определять вторую измененную точку 622 привязки измененного пути 620;
- третий интервал 553 безопасного отклонения, чтобы определять третью измененную точку 623 привязки измененного пути 620; и
- четвертый интервал 554 безопасного отклонения, чтобы определять четвертую измененную точку 624 привязки измененного пути 620.
[0174] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью определять данную измененную точку привязки как точку, соответствующую середине соответственного интервала безопасного отклонения. Поэтому электронное устройство 210 может быть выполнено с возможностью определять:
- середину первого интервала 551 безопасного отклонения и идентифицировать ее как первую измененную точку 621 привязки;
- середину второго интервала 552 безопасного отклонения и идентифицировать ее как вторую измененную точку 622 привязки;
- середину третьего интервала 553 безопасного отклонения и идентифицировать ее как третью измененную точку 623 привязки; и
- середину четвертого интервала 554 безопасного отклонения и идентифицировать ее как четвертую измененную точку 624 привязки.
[0175] В результате, можно сказать, что электронное устройство 210 может быть выполнено с возможностью определять измененный путь 620 как последовательность измененных точек привязки, где каждая измененная точка привязки в последовательности определяется электронным устройством 210 на основе соответственного интервала безопасного отклонения коридора 550 безопасного отклонения. Следует отметить, что поскольку каждая измененная точка привязки расположена в соответственном интервале безопасного отклонения (и, таким образом, в коридоре 550 безопасного отклонения), если транспортное средство 220 движется вдоль последовательности измененных точек привязки на сегменте 302 дороги, транспортное средство 220 будет находиться в пределах ограничений сегмента 302 дороги.
[0176] Предполагается, что измененный путь 620 может быть в форме полилинии, как изображено на фиг. 6. Однако, предполагается, что электронное устройство 210 может быть выполнено с возможностью применять процедуру интерполяции или другие известные способы, чтобы в некотором смысле “сглаживать” измененный путь 620.
[0177] Со ссылкой на фиг. 9, изображено альтернативное представление 900 опорного пути 320, соответственные безопасные интервалы коридора 550 безопасного отклонения и измененный путь 620. Как видно, множество точек привязки опорного пути 320 расположено на оси 902. Также, для каждой точки из множества точек привязки опорного пути 320, изображен соответственный интервал безопасного отклонения, который продолжается вдоль оси 904. В каждом интервале безопасного отклонения также изображена соответственная измененная точка привязки измененного пути 620.
[0178] Когда измененный путь 620 определяется электронным устройством 210, электронное устройство 210 может быть выполнено с возможностью генерирования данных управления действием для управления действием или иным образом запускать действие транспортного средства 220 при движении на сегменте 302 дороги. Например, электронное устройство 210 может быть выполнено с возможностью генерирования компьютерных команд для запуска транспортного средства 220, чтобы следовать измененному пути 620, вместо опорного пути 320, вдоль сегмента 302 дороги.
[0179] В некоторых вариантах осуществления настоящей технологии предполагается, что во время процедуры верификации привязки за привязкой, выполняемой электронным устройством 210 для определения пары расстояний безопасного отклонения для соответственных точек привязки опорного пути 320, электронное устройство 210 может быть выполнено с возможностью использовать увеличенное смоделированное представление транспортного средства 220 в противоположность ограничительной рамке 350. Помня, что ограничительная рамка 350 на фиг. 3 занимает по существу ту же самую площадь на смоделированном представлении сегмента 302 дороги, что и площадь поверхности, занятая транспортным средством 220 на сегменте 302 дороги, это означает, что электронное устройство 210 может быть выполнено с возможностью использовать данную увеличенную ограничительную рамку так, что увеличенная ограничительная рамка занимает по существу большую площадь на смоделированном представлении сегмента 302 дороги, чем площадь поверхности, занятая транспортным средством 220 на сегменте 302 дороги. Использование электронным устройством 210 данной увеличенной ограничительной рамки вместо ограничительной рамки 350 приведет к меньшим расстояниям безопасного отклонения, определенным для каждой точки привязки опорного пути 320 и, в свою очередь, к коридору безопасного отклонения, занимающему меньший участок сегмента 302 дороги по сравнению с коридором 550 безопасного отклонения.
[0180] Поэтому предполагается, что использование данной увеличенной ограничительной рамки вместо ограничительной рамки 350 для определения данного измененного пути может дополнительно уменьшать вероятность выхода транспортного средства 220 за ограничения сегмента 302 дороги при следовании данному измененному пути по сравнению с тем, когда электронное устройство 210 выполнено с возможностью использовать ограничительную рамку 350 для определения измененного пути 620.
[0181] В некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью генерировать увеличенное смоделированное представление транспортного средства 220 посредством искусственного увеличения площади, перекрываемой ограничительной рамкой 350. В одном примере, электронное устройство 210 может быть выполнено с возможностью генерировать увеличенную ограничительную рамку путем пропорционального увеличения ширины и/или длины ограничительной рамки 350. В другом примере, электронное устройство 210 может быть выполнено с возможностью генерировать увеличенное смоделированное представление транспортного средства 220 путем частичного вращения (например +/-20 градусов) ограничительной рамки 350 вокруг оси 356 и использовать эффективную площадь, перекрываемую ограничительной рамкой 350 при частичном вращении, как увеличенное смоделированное представление транспортного средства 220.
[0182] В дополнительных вариантах осуществления электронное устройство 210 может реализовывать модуль вычисления опорного пути. Модуль вычисления опорного пути может быть выполнено с возможностью выполнять процедуру верификации привязки за привязкой, как описано выше. К тому же, модуль вычисления опорного пути может быть выполнено с возможностью генерировать измененный путь 620, как описано выше.
[0183] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью хранить и анализировать данные о динамических объектах в соседних полосах. Например, электронное устройство 210 может быть выполнено с возможностью реализовывать модуль отслеживания динамических объектов или просто устройство отслеживания динамических объектов. Например, электронное устройство 210 может быть выполнено с возможностью применять устройство отслеживания динамических объектов для определения опорных путей для соответственных динамических объектов относительно центральных линий соответственных полос, в которых движутся данные объекты.
[0184] Предполагается, что устройство отслеживания динамических объектов может быть выполнено с возможностью определять центральные линии соответственных полос, в которых движется данный объект (такой как соседнее транспортное средство), аналогично тому, как электронное устройство 210 выполнено с возможностью определять центральную линию полосы 304.
[0185] В некоторых случаях устройство отслеживания динамических объектов может быть выполнено с возможностью обнаруживать, когда положение динамического объекта относительно центральной линии соответственной полосы увеличивается. В таких случаях, устройство отслеживания динамических объектов может быть выполнено с возможностью определять, в ответ на такое увеличение, что динамический объект пытается произвести маневр смены полосы. Данные, указывающие такое определение устройством отслеживания динамических объектов, могут передаваться на модуль вычисления опорного пути.
[0186] Например, данные, указывающие, что динамический объект пытается произвести маневр смены полосы, могут использоваться электронным устройством 210 для управления действием транспортного средства 220, чтобы избежать или по меньшей мере уменьшить риск столкновения между динамическим объектом и транспортным средством 220.
[0187] В некоторых вариантах осуществления модуль моделирования ограничительной рамки может использоваться для генерации ограничительной рамки для динамического объекта аналогично тому, как модуль моделирования ограничительной рамки выполнен с возможностью генерировать ограничительную рамку 350 (и/или увеличенные представления транспортного средства 220) для транспортного средства 220. К тому же, модуль вычисления опорного пути может быть выполнен с возможностью генерировать данный опорный путь и/или измененный путь для соответственного динамического объекта аналогично тому, как модуль вычисления опорного пути выполнен с возможностью определять опорный путь 320 и/или измененный путь 620 для транспортного средства 220.
[0188] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью исполнять способ 700 изменения опорного пути 320, ассоциированного с транспортным средством 220. Способ 700 описан ниже более подробно.
Этап 702: получение данных сегмента дороги и данных опорного пути
[0189] Способ 700 начинается на этапе 702 электронным устройством 210, выполненным с возможностью получать данные сегмента дороги и данные опорного пути. Данные сегмента дороги указывают ограничения сегмента 302 дороги. Ограничения могут содержать по меньшей мере одно из (i) физических ограничений на сегменте 302 дороги и (ii) ограничений правил дорожного движения на сегменте 302 дороги, как пояснено выше.
[0190] Данные опорного пути имеют множество точек привязки, задающих опорный путь 320 вдоль сегмента 302 дороги. Следует отметить, что электронное устройство 210 может быть выполнено с возможностью генерировать опорный путь 320. Например, электронное устройство 210 может быть выполнено с возможностью задавать множество точек привязки вдоль центральной линии полосы 304, как пояснено выше.
[0191] В некоторых вариантах осуществления расстояние между множеством точек привязки может зависеть по меньшей мере от скорости транспортного средства 220 во время генерации опорного пути 320.
Этап 704: использование данных сегмента дороги и данных опорного пути, чтобы определить интервал безопасного отклонения для каждой точки из множества точек привязки
[0192] Способ 700 продолжается на этапе 704 электронным устройством 210, выполненным с возможностью использовать данные сегмента дороги и данные опорного пути для определения соответственного интервала безопасного отклонения для каждой точки из множества точек привязки. Следует отметить, что данный интервал безопасного отклонения для данной точки привязки указывает приемлемое отклонение транспортного средства 220 от опорного пути 320, как пояснено выше, так что если транспортное средство 220 находится в пределах данного интервала безопасного отклонения, транспортное средство 220 попадает в пределы ограничений сегмента 302 дороги. Интервалы безопасного отклонения образуют безопасный коридор 550 для транспортного средства 220, как изображено на фиг. 5.
[0193] Следует отметить, что электронное устройство 210 может быть выполнено с возможностью выполнять процесс генерации коридора 550 безопасного отклонения как часть этапа 704. Как обсуждено ранее, коридор 550 безопасного отклонения задает участок сегмента 302 дороги, на котором транспортное средство 220 попадает в пределы ограничений сегмента 302 дороги.
[0194] В некоторых вариантах осуществления этап 706 может содержать электронное устройство 210, выполненные с возможностью генерировать смоделированное представление транспортного средства 220 для соответственной точки привязки из множества точек привязки на смоделированном представлении сегмента 302 дороги. Например, электронное устройство 210 может быть выполнено с возможностью генерировать ограничительную рамку 350 и позиционировать ее в соответственных точках привязки из множества точек привязки, как пояснено выше для определения соответственных интервалов безопасного отклонения соответственных точек привязки.
[0195] В других вариантах осуществления смоделированное представление транспортного средства 220 может генерироваться электронным устройством 210, так что оно перекрывает искусственно увеличенную поверхность на смоделированном представлении сегмента 302 дороги. Искусственно увеличенная поверхность больше, чем действительная поверхность, которую перекрывает транспортное средство 220 на сегменте 302 дороги. Например, электронное устройство 210 может быть выполнено с возможностью генерировать увеличенное представление транспортного средства 220, как пояснено выше. В одном примере, электронное устройство 210 может быть выполнено с возможностью генерировать увеличенную ограничительную рамку путем пропорционального увеличения ширины и/или длины ограничительной рамки 350.
[0196] Предполагается, что смоделированное представление транспортного средства 220 может перекрывать действительную поверхность на смоделированном представлении сегмента 302 дороги, и электронное устройство 210 может быть выполнено с возможностью, как часть определения интервалов безопасного отклонения соответственных точек привязки, поворачивать смоделированное представление на предопределенный угол для генерации увеличенной проекции транспортного средства 220 на сегмент 302 дороги. Например, электронное устройство 210 может быть выполнено с возможностью генерировать увеличенное смоделированное представление транспортного средства 220 путем частичного вращения (например +/-20 градусов) ограничительной рамки 350 вокруг оси 356 и использовать эффективную площадь, перекрываемую ограничительной рамкой 350 при частичном вращении, как увеличенное смоделированное представление транспортного средства 220 с целью определения соответственных безопасных интервалов для коридора 550 безопасного отклонения.
Этап 706: использование интервалов безопасного отклонения для определения измененного пути для транспортного средства вместо опорного пути
[0197] Способ 700 продолжается на этапе 706 электронным устройством 210, выполненным с возможностью использовать интервалы безопасного отклонения для определения измененного пути 620 для транспортного средства 220 вместо опорного пути 320, так что при следовании измененному пути 620 транспортное средство 220 попадает в пределы ограничений сегмента 302 дороги. Следует отметить, что измененный путь 620 соответствует коридору 550 безопасного отклонения.
[0198] В некоторых вариантах осуществления электронное устройство 210 может быть выполнено с возможностью определять измененные точки привязки для соответственных интервалов безопасного отклонения при использовании интервалов безопасного отклонения для определения измененного пути 620, так что данная измененная точка привязки попадает в пределы соответственного интервала безопасного отклонения. Электронное устройство 210 может быть выполнено с возможностью определять измененный путь 620 как последовательность измененных точек привязки, где данная измененная точка привязки соответствует середине соответственного безопасного интервала.
[0199] Предполагается, что последовательность измененных точек привязки может быть в форме полилинии.
[0200] В некоторых вариантах осуществления настоящей технологии электронное устройство 210 может также быть выполнено с возможностью генерировать данные управления действием для управления действием транспортного средства 220, где данные управления действием представляют компьютерные команды для транспортного средства 220, чтобы следовать измененному пути 620 вдоль сегмента 302 дороги.
[0201] В некоторых вариантах осуществления транспортное средство 220 может находиться рядом или вблизи другого транспортного средства на сегменте 302 дороги. Предполагается, что по меньшей мере некоторые этапы способа 700 могут выполняться для соседнего транспортного средства электронным устройством 210.
[0202] В некоторых вариантах осуществления при генерации данного опорного пути для соседнего транспортного средства электронное устройство 210 может быть выполнено с возможностью осуществлять доступ к базе данных исторических маневров, ассоциированных с соседним транспортным средством, и генерировать прогнозируемый опорный путь для соседнего транспортного средства. В некоторых вариантах осуществления, прогнозируемый опорный путь соседнего транспортного средства может использоваться для модифицирования текущего пути транспортного средства 220 вдоль сегмента 302 дороги.
[0203] Следует ясно понимать, что не требуется, чтобы все технические результаты, упомянутые здесь, достигались во всех и каждом варианте осуществления настоящей технологии.
[0204] Модификации и усовершенствования вышеописанных реализаций настоящей технологии могут стать очевидными специалистам в данной области техники. Подразумевается, что предшествующее описание является иллюстративным, а не ограничивающим. Поэтому подразумевается, что объем настоящей технологии ограничивается только объемом прилагаемой формулы изобретения.
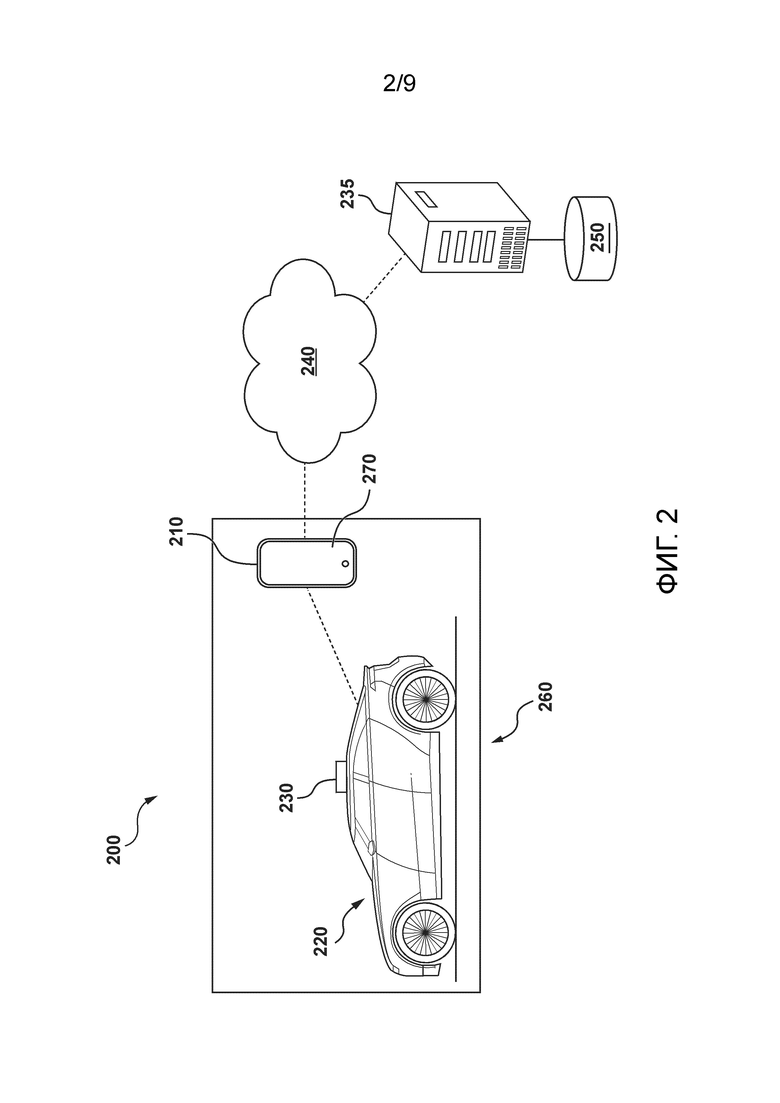
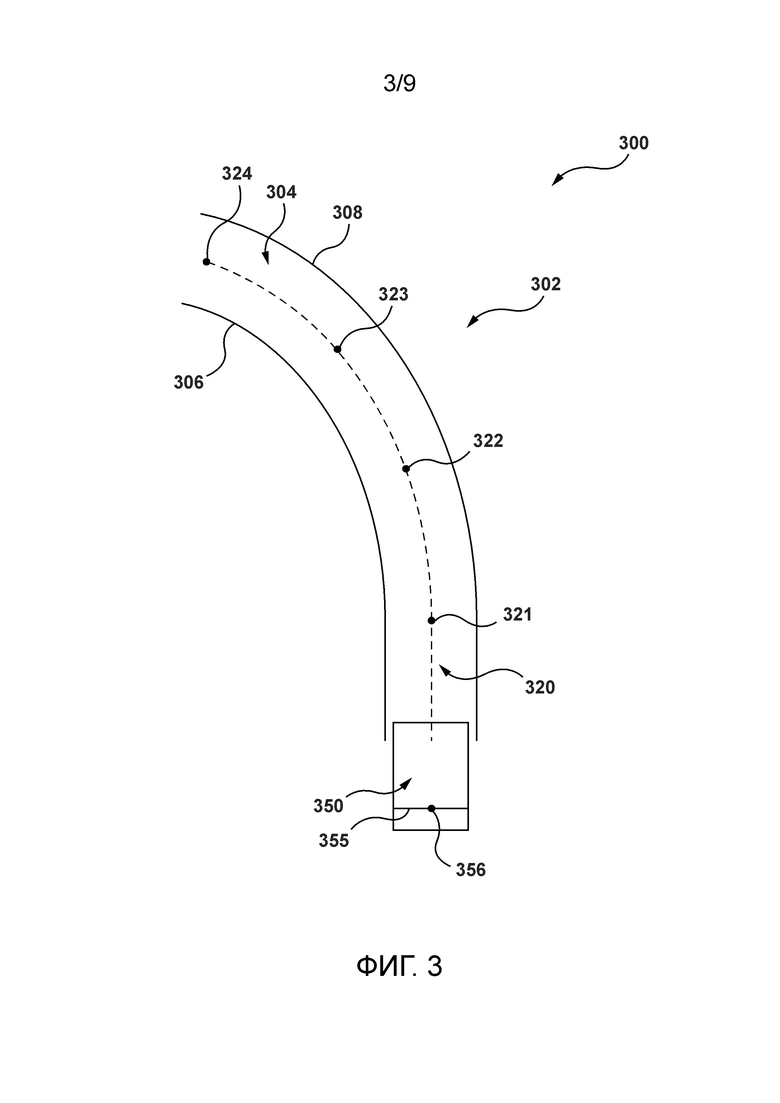
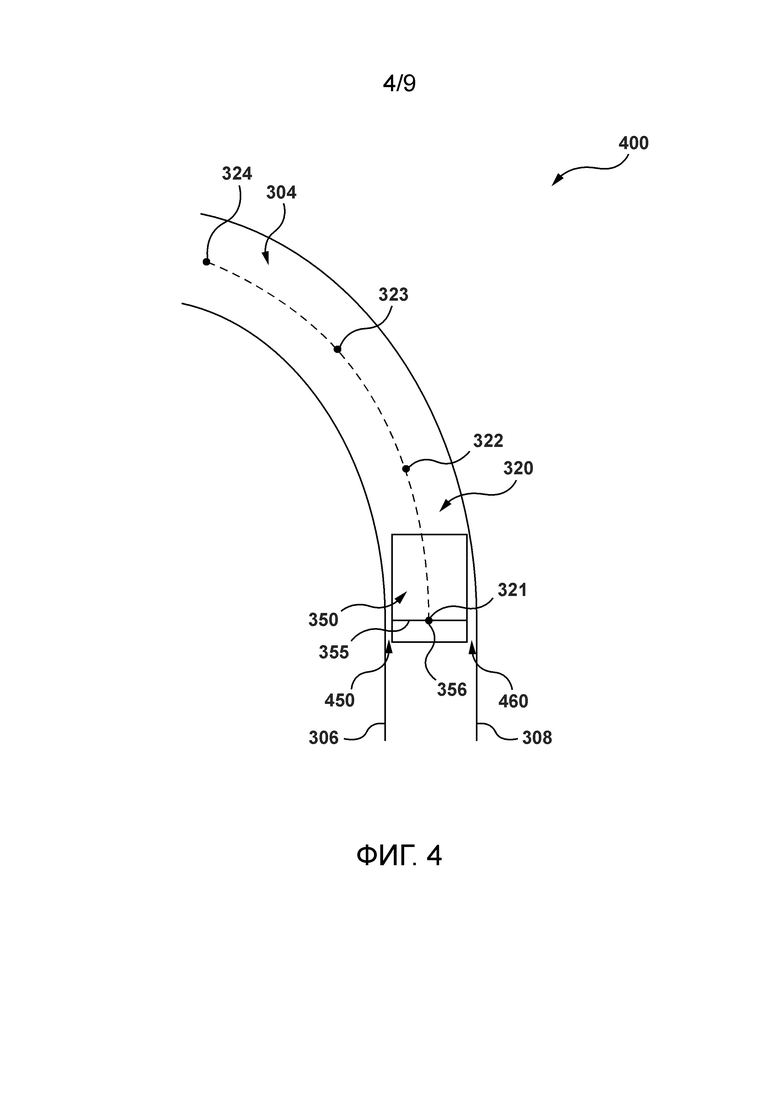
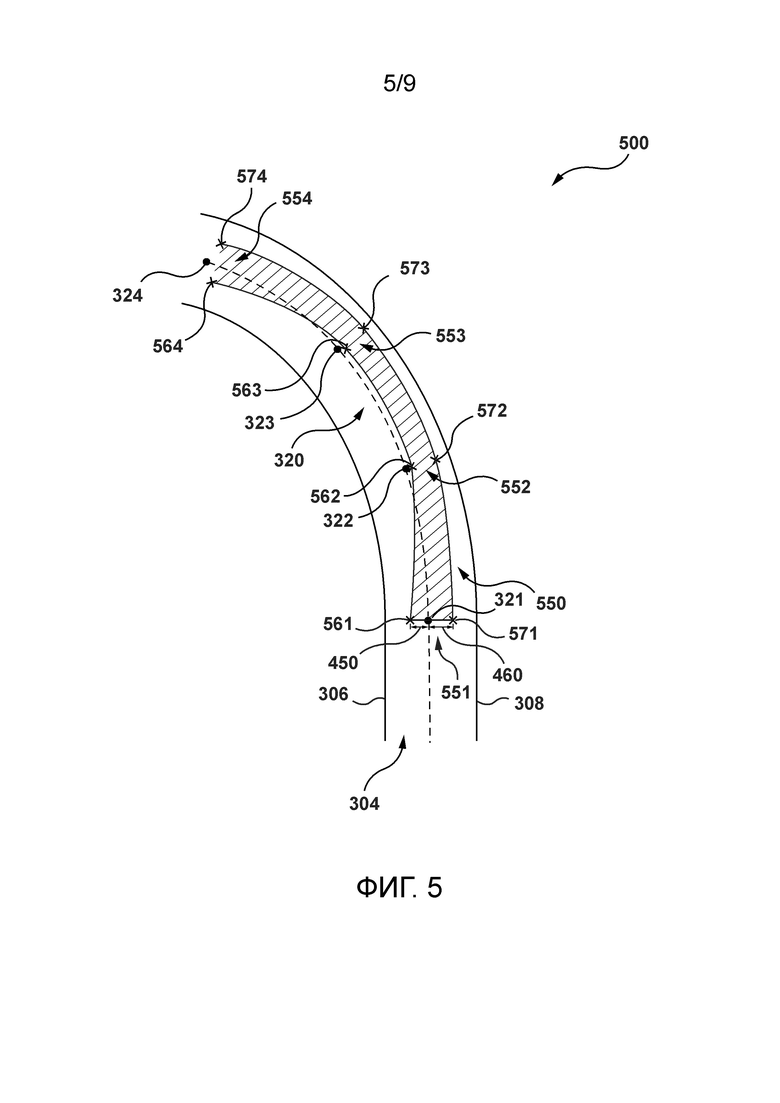
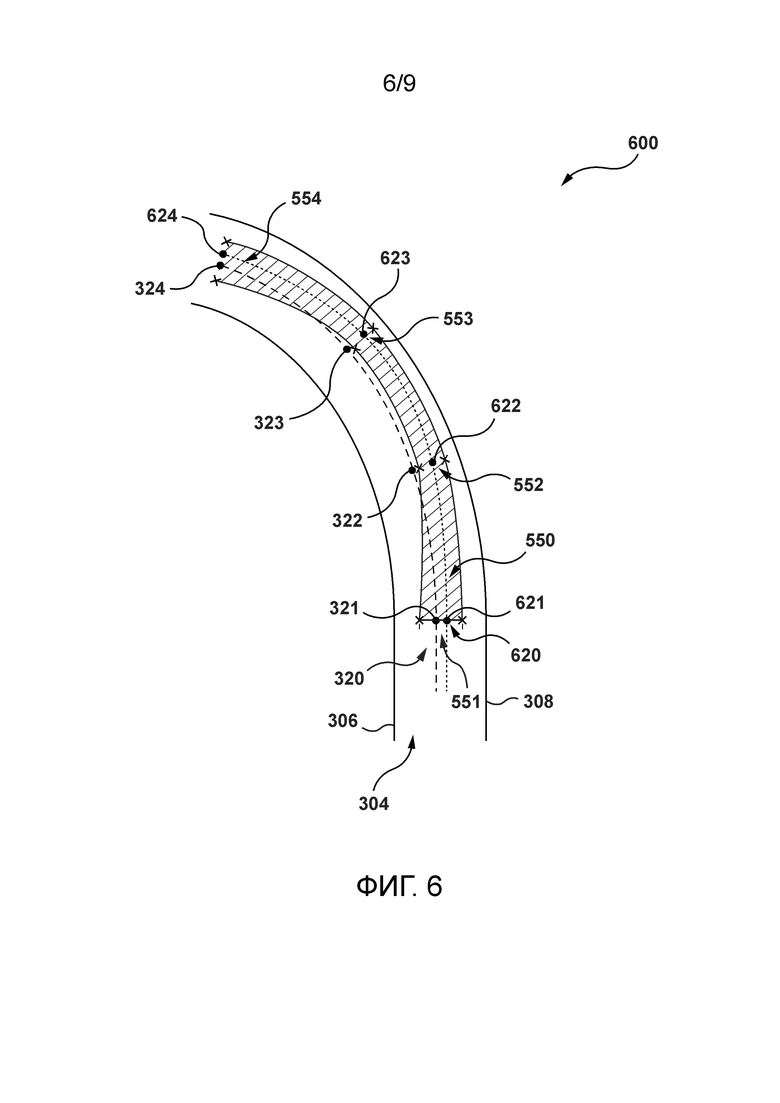
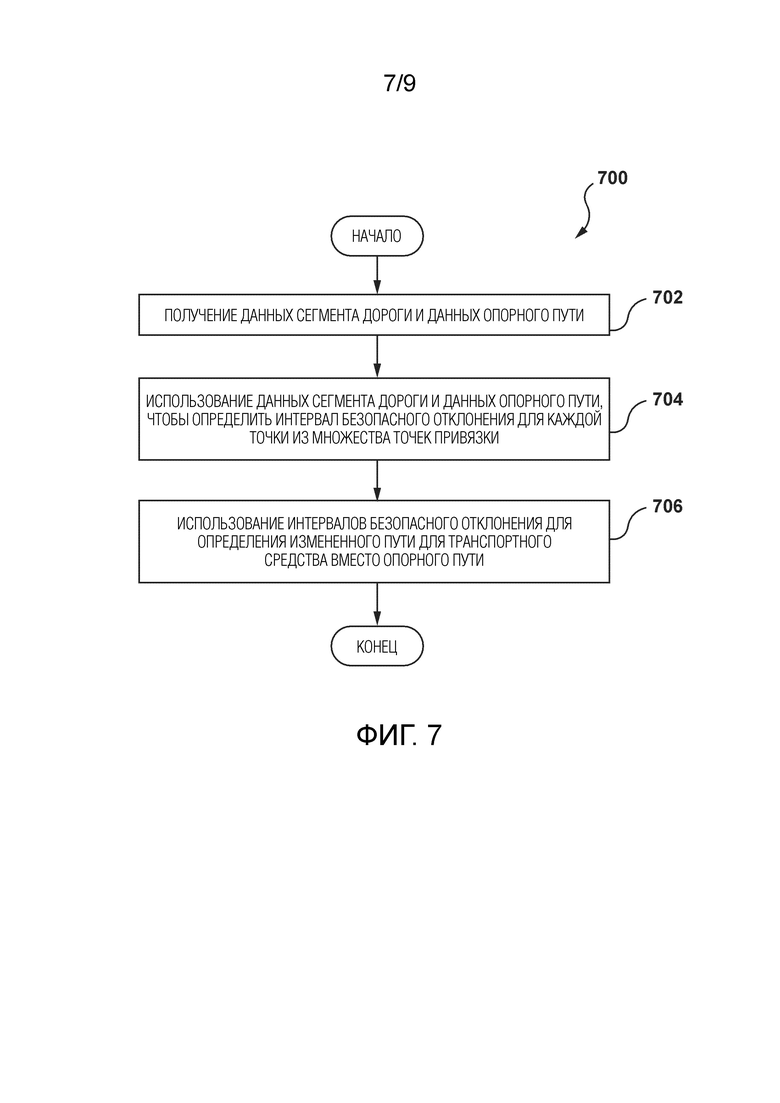
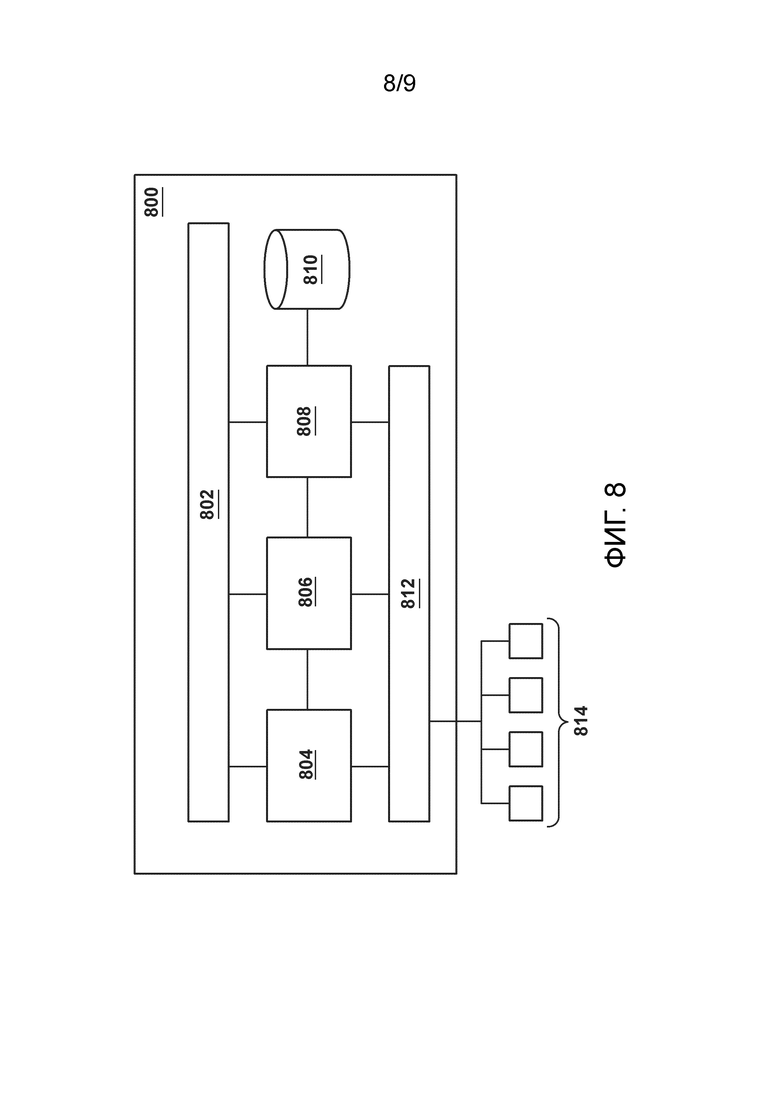
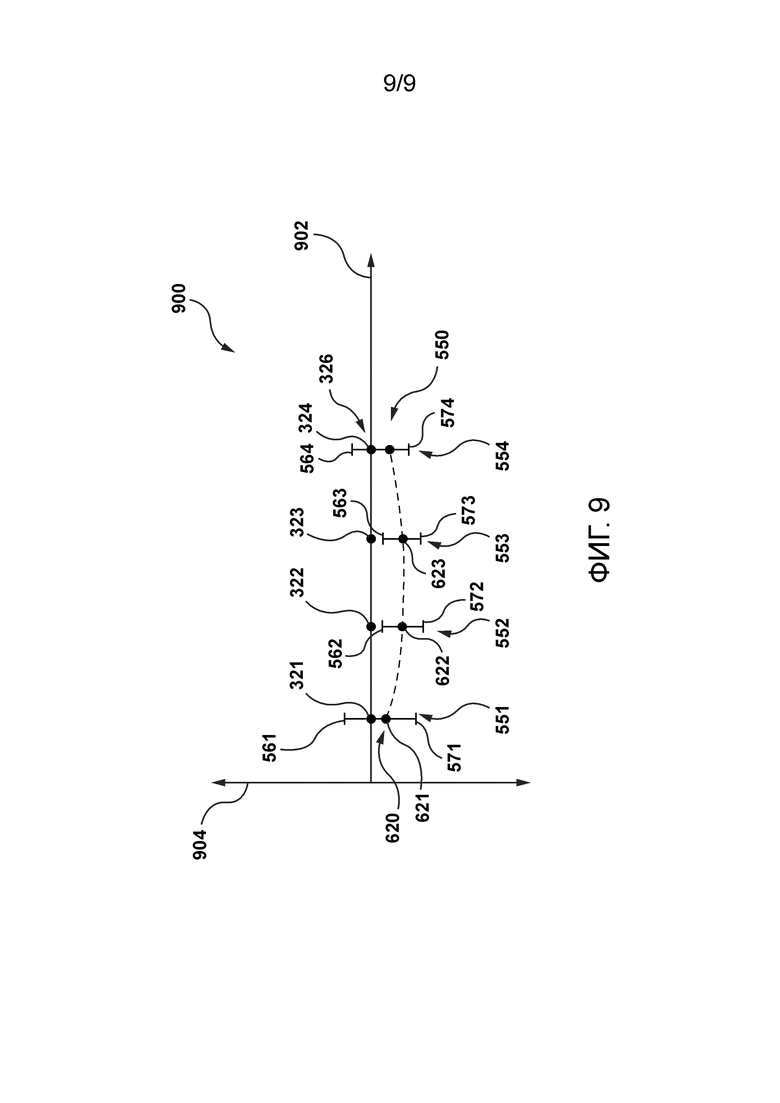
Изобретение относится к беспилотным автомобилям. Реализуемый компьютером способ изменения опорного пути, ассоциированного с транспортным средством, содержит этапы, на которых получают, посредством электронного устройства, данные сегмента дороги и данные опорного пути. Причем данные сегмента дороги указывают ограничения сегмента дороги, данные опорного пути имеют множество точек привязки, используют данные сегмента дороги и данные опорного пути, чтобы определять интервал безопасного отклонения для каждой точки из множества точек привязки. Данный интервал безопасного отклонения для данной точки привязки указывает приемлемое отклонение транспортного средства от опорного пути, так что если транспортное средство находится в пределах данного интервала безопасного отклонения, транспортное средство попадает в пределы ограничений сегмента дороги. Используют интервалы безопасного отклонения для определения измененного пути для транспортного средства вместо опорного пути, так что при следовании измененному пути транспортное средство попадает в пределы ограничений сегмента дороги. Достигается планирование операции SDC при приближении к повороту. 2 н. и 36 з.п. ф-лы, 9 ил.
1. Реализуемый компьютером способ изменения опорного пути, ассоциированного с транспортным средством, причем опорный путь представляет собой путь вдоль сегмента дороги, которому, по оценкам, должно следовать транспортное средство, способ исполняют электронным устройством, причем способ содержит этапы, на которых:
- получают, посредством электронного устройства, данные сегмента дороги и данные опорного пути,
причем данные сегмента дороги указывают ограничения сегмента дороги,
данные опорного пути имеют множество точек привязки, задающих опорный путь вдоль сегмента дороги;
- используют, посредством электронного устройства, данные сегмента дороги и данные опорного пути, чтобы определять интервал безопасного отклонения для каждой точки из множества точек привязки,
причем данный интервал безопасного отклонения для данной точки привязки указывает приемлемое отклонение транспортного средства от опорного пути,
так что если транспортное средство находится в пределах данного интервала безопасного отклонения, транспортное средство попадает в пределы ограничений сегмента дороги; и
- используют, посредством электронного устройства, интервалы безопасного отклонения для определения измененного пути для транспортного средства вместо опорного пути,
так что при следовании измененному пути транспортное средство попадает в пределы ограничений сегмента дороги.
2. Способ по п. 1, причем интервалы безопасного отклонения формируют коридор безопасного отклонения для транспортного средства,
коридор безопасного отклонения задает участок сегмента дороги, на котором транспортное средство попадает в пределы ограничений сегмента дороги.
3. Способ по п. 2, причем измененный путь попадает в пределы коридора безопасного отклонения.
4. Способ по п. 1, причем ограничения содержат по меньшей мере одно из (i) физических ограничений на сегменте дороги и (ii) ограничений правил дорожного движения на сегменте дороги.
5. Способ по п. 1, причем электронное устройство ассоциировано с беспилотным автомобилем (SDC).
6. Способ по п. 5, причем транспортное средство представляет собой SDC.
7. Способ по п. 6, причем способ дополнительно содержит этап, на котором генерируют опорный путь.
8. Способ по п. 5, причем SDC отличается от транспортного средства и причем способ дополнительно содержит этап, на котором генерируют опорный путь посредством: этапа, на котором осуществляют доступ к базе данных исторических маневров, ассоциированных с транспортным средством, и генерируют прогноз опорного пути.
9. Способ по п. 6, причем способ дополнительно содержит этап, на котором
- генерируют, посредством электронного устройства, данные управления действием для управления действием SDC,
данные управления действием представляют компьютерные команды для SDC, чтобы следовать измененному пути вдоль сегмента дороги.
10. Способ по п. 5, причем SDC находится вблизи транспортного средства на сегменте дороги.
11. Способ по п. 10, причем способ дополнительно содержит этап, на котором
- используют, посредством электронного устройства, измененный путь транспортного средства для модифицирования текущего пути SDC вдоль сегмента дороги.
12. Способ по п. 1, причем этап, на котором используют данные сегмента дороги и данные опорного пути для определения интервалов безопасного отклонения дополнительно содержит этапы, на которых:
- генерируют, посредством электронного устройства, смоделированное представление транспортного средства для соответственной точки привязки из множества точек привязки на смоделированном представлении сегмента дороги и
- определяют, посредством электронного устройства, интервалы безопасного отклонения соответственных точек привязки из множества точек привязки на основе соответственного смоделированного представления транспортного средства на смоделированном представлении сегмента дороги.
13. Способ по п. 12, причем смоделированное представление транспортного средства перекрывает искусственно увеличенную поверхность на смоделированном представлении сегмента дороги,
причем искусственно увеличенная поверхность больше, чем действительная поверхность, которую транспортное средство перекрывает на сегменте дороги.
14. Способ по п. 12, причем смоделированное представление транспортного средства перекрывает действительную поверхность на смоделированном представлении сегмента дороги и причем способ дополнительно содержит, как часть определения интервалов безопасного отклонения соответственных точек привязки, поворот смоделированного представления с использованием предопределенного угла для генерации увеличенной проекции транспортного средства на сегмент дороги.
15. Способ по п. 1, причем этап, на котором используют интервалы безопасного отклонения для определения измененного пути, содержит этапы, на которых:
- определяют, посредством электронного устройства, измененные точки привязки для соответственных интервалов безопасного отклонения,
так что данная измененная точка привязки попадает в пределы соответственного интервала безопасного отклонения;
- определяют, посредством электронного устройства, измененный путь как представляющий собой последовательность измененных точек привязки.
16. Способ по п. 15, причем данная измененная точка привязки соответствует середине соответственного безопасного интервала.
17. Способ по п. 15, причем последовательность измененных точек привязки содержит полилинию.
18. Способ по п. 1, дополнительно содержащий задание множества точек привязки.
19. Способ по п. 18, причем задание основано по меньшей мере на скорости транспортного средства.
20. Электронное устройство для изменения опорного пути, ассоциированного с транспортным средством, причем опорный путь представляет собой путь вдоль сегмента дороги, которому, по оценкам, должно следовать транспортное средство, причем электронное устройство выполнено с возможностью:
- получать данные сегмента дороги и данные опорного пути,
причем данные сегмента дороги указывают ограничения сегмента дороги,
данные опорного пути имеют множество точек привязки, задающих опорный путь вдоль сегмента дороги;
- использовать данные сегмента дороги и данные опорного пути, чтобы определять интервал безопасного отклонения для каждой точки из множества точек привязки,
причем данный интервал безопасного отклонения для данной точки привязки указывает приемлемое отклонение транспортного средства от опорного пути,
так что если транспортное средство расположено в пределах данного интервала безопасного отклонения, транспортное средство попадает в пределы ограничений сегмента дороги; и
- использовать интервалы безопасного отклонения для определения измененного пути для транспортного средства вместо опорного пути,
так что при следовании измененному пути транспортное средство попадает в пределы ограничений сегмента дороги.
21. Электронное устройство по п. 20, причем интервалы безопасного отклонения образуют коридор безопасного отклонения для транспортного средства,
коридор безопасного отклонения задает участок сегмента дороги, на котором транспортное средство попадает в пределы ограничений сегмента дороги.
22. Электронное устройство по п. 21, причем измененный путь соответствует коридору безопасного отклонения.
23. Электронное устройство по п. 20, причем ограничения содержат по меньшей мере одно из (i) физических ограничений на сегменте дороги и (ii) ограничений правил дорожного движения на сегменте дороги.
24. Электронное устройство по п. 20, причем электронное устройство ассоциировано с беспилотным автомобилем (SDC).
25. Электронное устройство по п. 24, причем транспортное средство представляет собой SDC.
26. Электронное устройство по п. 25, причем способ дополнительно содержит генерацию опорного пути.
27. Электронное устройство по п. 24, причем SDC отличается от транспортного средства и причем способ дополнительно содержит генерацию опорного пути посредством осуществления доступа к базе данных исторических маневров, ассоциированных с транспортным средством, и генерацию прогноза опорного пути.
28. Электронное устройство по п. 25, причем способ дополнительно содержит
- генерацию, посредством электронного устройства, данных управления действием для управления действием SDC,
данные управления действием представляют компьютерные команды для SDC, чтобы следовать измененному пути вдоль сегмента дороги.
29. Электронное устройство по п. 24, причем SDC находится вблизи транспортного средства на сегменте дороги.
30. Электронное устройство по п. 29, причем способ дополнительно содержит
- использование, посредством электронного устройства, измененного пути транспортного средства для модифицирования текущего пути SDC вдоль сегмента дороги.
31. Электронное устройство по п. 20, причем использование данных сегмента дороги и данных опорного пути для определения интервалов безопасного отклонения дополнительно содержит:
- генерацию, посредством электронного устройства, смоделированного представления транспортного средства для соответственной точки привязки из множества точек привязки на смоделированном представлении сегмента дороги; и
- определение, посредством электронного устройства, интервалов безопасного отклонения соответственных точек привязки из множества точек привязки на основе соответственного смоделированного представления транспортного средства на смоделированном представлении сегмента дороги.
32. Электронное устройство по п. 31, причем смоделированное представление транспортного средства перекрывает искусственно увеличенную поверхность на смоделированном представлении сегмента дороги,
причем искусственно увеличенная поверхность больше, чем действительная поверхность, которую транспортное средство перекрывает на сегменте дороги.
33. Электронное устройство по п. 31, причем смоделированное представление транспортного средства перекрывает действительную поверхность на смоделированном представлении сегмента дороги и причем способ дополнительно содержит, как часть определения интервалов безопасного отклонения соответственных точек привязки, вращение смоделированного представления с использованием предварительно определенного угла для генерации увеличенной проекции транспортного средства на сегмент дороги.
34. Электронное устройство по п. 20, причем использование интервалов безопасного отклонения для определения измененного пути содержит:
- определение, посредством электронного устройства, измененных точек привязки для соответственных интервалов безопасного отклонения,
так что данная измененная точка привязки попадает в пределы соответственного интервала безопасного отклонения;
- определение, посредством электронного устройства, измененного пути как представляющего собой последовательность измененных точек привязки.
35. Электронное устройство по п. 34, причем данная измененная точка привязки соответствует середине соответственного безопасного интервала.
36. Электронное устройство по п. 34, причем последовательность измененных точек привязки содержит полилинию.
37. Электронное устройство по п. 20, причем электронное устройство дополнительно выполнено с возможностью задавать множество точек привязки.
38. Электронное устройство по п. 37, причем электронное устройство выполнено с возможностью задавать множество точек привязки на основе по меньшей мере скорости транспортного средства.
| US 9911346 B2, 06.03.2018 | |||
| KR 20170050499 A, 11.05.2017 | |||
| CN 106647773 B, 17.09.2019 | |||
| JP 5362691 B2, 11.12.2013. |

