Область техники, к которой относится изобретение
[0001] Настоящая технология относится к компьютеризованным способам и системам для компьютеризованных автомобилей, а более конкретно, к способам и системам для формирования траектории для беспилотного автомобиля (SDC).
Уровень техники
[0002] Системы полностью или высокоавтоматизированного вождения могут быть сконструированы с возможностью управлять транспортным средством на дороге без взаимодействия с водителем (например, в режиме без водителя) либо согласно другому внешнему управлению. Например, беспилотные транспортные средства и/или автономные транспортные средства сконструированы с возможностью управления транспортным средством компьютеризованным способом.
[0003] Автономное транспортное средство или просто беспилотный автомобиль (для краткости SDC) выполнено с возможностью проезжать по запланированному пути между своей текущей позицией и целевой будущей позицией без (или с минимальным) ввода от водителя. С этой целью, SDC может иметь доступ ко множеству датчиков, чтобы "воспринимать" свою окружающую область. Например, данная реализация SDC может включать в себя одну или более камер, один или более лидаров и один или более радаров. SDC дополнительно может иметь доступ к трехмерной карте, чтобы локализовать себя в пространстве.
[0004] Одна из технических проблем, ассоциированных с SDC, представляет собой их способность прогнозировать или иным способом определять траектории других участников дорожного движения (например, других транспортных средств), движущихся в окружающей области SDC, например, в соседних полосах движения. Когда данное транспортное средство, движущееся, например, впереди SDC в соседней полосе движения, собирается выполнять маневр (такой как поворот налево или направо), его траектория может перекрываться и/или пересекаться (по меньшей мере, частично) с траекторией SDC, что может вызывать высокий риск столкновения между SDC и одним из других транспортных средств (включающих в себя данное) в окружающей области. Следовательно, это может требовать от SDC необходимости принимать корректирующие меры, будь то торможение или в противном случае активное ускорение, приводящее к построению траектории SDC, обеспечивающей минимальный риск дорожно-транспортного происшествия.
[0005] Предусмотрено несколько способов определения траектории, известных в данной области техники.
[0006] Публикация заявки на патент (США) номер 2019/0295179 A1, опубликованная 26 сентября 2019 года, назначенная Mobileye Vision Technologies Ltd и озаглавленная "Navigation With Liability Tracking", изучает систему отслеживания ответственности за дорожно-транспортные происшествия, которая включает в себя обрабатывающее устройство, программируемое с возможностью принимать, из устройства захвата изображений, изображение, представляющее окружение рассматриваемого транспортного средства, анализировать изображение, чтобы идентифицировать целевое транспортное средство в окружении рассматриваемого транспортного средства, и определять одну или более характеристик навигационного состояния целевого транспортного средства. Устройство дополнительно программируется с возможностью сравнивать характеристики навигационного состояния целевого транспортного средства по меньшей мере с одним правилом ответственности за дорожно-транспортные происшествия, сохранять одно или более значений, указывающих потенциальную ответственность за дорожно-транспортное происшествие со стороны идентифицированного целевого транспортного средства, на основе сравнения характеристик навигационного состояния идентифицированного целевого транспортного средства по меньшей мере с одним правилом ответственности за дорожно-транспортные происшествия, и выводить одно или более значений, после дорожно-транспортного происшествия между рассматриваемым транспортным средством и целевым транспортным средством, для определения ответственности за дорожно-транспортное происшествие.
[0007] Публикация заявки на патент (США) номер 2019/0034794 A1, опубликованная 31 января 2019 года, назначенная Waymo LLC и озаглавленная "Neural Networks For Vehicle Trajectory Planning", изучает системы, способы, устройства и другие технологии для обучения нейронной сетевой системы для планирования траектории с возможностью определять точки маршрута для траекторий транспортных средств. Нейронная сетевая обучающая система может обучать нейронную сетевую систему для планирования траектории на нескольких обучающих наборах данных. Каждый обучающий набор данных может включать в себя: (i) первый обучающий ввод, который характеризует набор точек маршрута, которые представляют соответствующие местоположения транспортного средства в каждом из последовательности первых временных шагов, (ii) второй обучающий ввод, который характеризует, по меньшей мере, одно из (a) данных окружения, которые представляют текущее состояние окружения транспортного средства, или (b) навигационных данных, которые представляют запланированный навигационный маршрут для транспортного средства, и (iii) целевой вывод, характеризующий точку маршрута, которая представляет целевое местоположение транспортного средства на втором временном шаге, который следует после последовательности первых временных шагов.
Сущность изобретения
[0008] Задача настоящей технологии заключается в том, чтобы улучшать по меньшей мере некоторые неудобства, присутствующие в предшествующем уровне техники. Варианты осуществления настоящей технологии могут предоставлять и/или расширять объем подходов и/или способов достижения целей и задач настоящей технологии.
[0009] Разработчики настоящей технологии выяснили, что процесс определения траектории для транспортных средств в окружающей области SDC представляет собой ресурсо- и времязатратный процесс. Одновременно, желательно определять сторонние траектории максимально возможно быстро, чтобы базировать формирование траектории SDC на основе точных прогнозных траекторий третьих сторон. Таким образом, разработчики настоящей технологии принимают во внимание, что может быть желательным сокращать число возможных вариантов сторонних траекторий. Разработчики также принимают во внимание, что некоторые из таких прогнозных траекторий могут быть ассоциированы с маловероятными маневрами, т.е. с маневрами, которые не могут физически выполняться посредством данного транспортного средства с учетом его значения мгновенной скорости или других текущих факторов.
[0010] Вообще говоря, неограничивающие варианты осуществления настоящей технологии заключают в себе формирование траектории для данного транспортного средства на основе кинематических характеристик данного транспортного средства (например, значения мгновенной скорости), определенных посредством датчиков SDC, и, на основе этих данных, определение того, будет ли данное транспортное средство иметь возможность выполнять предстоящий маневр, который представляет собой часть одной или более прогнозных траекторий для данного транспортного средства. На основе этого определения, SDC дополнительно может исключать из рассмотрения предстоящий маневр для данного транспортного средства (и в силу этого ассоциированную прогнозную траекторию). В завершение, SDC может переходить к формированию траектории SDC с учетом оставшихся прогнозных траекторий, определенных для данного транспортного средства.
[0011] Острота технической проблемы определения траектории данного транспортного средства (которое не представляет собой непосредственно SDC), может быть проиллюстрирована посредством следующего гипотетического сценария. Предположим, что SDC, движущееся по данному участку дороги, определяет то, что одно из транспортных средств, движущихся, например, в соседней полосе движения, имеет значение мгновенной скорости, существенно превышающее ограничение скорости, предписанное для данной секции. SDC в силу этого может идентифицировать это транспортное средство в качестве нарушителя правил дорожного движения (при этом известно, что нарушители правил дорожного движения можно ассоциировать с непредсказуемым или, в общем, непрогнозируемым поведением на дороге). Одновременно, SDC может принимать из трехмерной карты информацию, указывающую предстоящий левый поворот на предварительно определенном расстоянии впереди SDC. Поскольку поведение при вождении нарушителей правил дорожного движения может быть в определенной степени непрогнозируемым, что характеризуется созданием неудобства или опасности для других участников дорожного движения, SDC должен иметь возможность определять то, собирается ли нарушитель правил дорожного движения выполнять предстоящий левый поворот, и на основе этого пытаться снижать риск столкновения с любым из участников дорожного движения и в целом использовать эту информацию при формировании траектории для самого SDC.
[0012] Другими словами, SDC может определять, на основе значения мгновенной скорости данного транспортного средства, то, какое расстояние требуется данному транспортному средству для того, чтобы замедлять ход до значения скорости, позволяющего ему выполнять маневр. Продолжая вышеприведенный пример, в котором маневр представляет собой левый поворот, SDC может определять то, что с учетом значения мгновенной скорости данного транспортного средства, не должно быть возможности для него выполнять левый поворот, поскольку расстояние для замедления хода до значения скорости, при котором этот левый поворот является физически возможным для данного транспортного средства, является слишком большим по мере того, как оно проезжает непосредственно вхождение в левый поворот. Таким образом, SDC может квалифицировать этот левый поворот, для данного транспортного средства, в качестве маловероятного маневра, в силу этого исключая из рассмотрения левый поворот из множества возможных траекторий для данного транспортного средства.
[0013] Альтернативно, если SDC определяет то, что по-прежнему будет возможным выполнять левый поворот для данного транспортного средства, например, вследствие его не слишком высокого значения мгновенной скорости, позволяющего ему замедляться до значения максимальной скорости, ассоциированного с безопасным вхождением в левый поворот, SDC по-прежнему может рассматривать левый поворот в числе множества возможных траекторий для данного транспортного средства.
[0014] В завершение, на основе определения маловероятного маневра для данного транспортного средства, SDC может переходить к формированию траектории SDC на основе множества возможных траекторий для данного транспортного средства.
[0015] В соответствии с первым широким аспектом настоящей технологии предусмотрен способ формирования траектории для беспилотного автомобиля (SDC). SDC ассоциирован с электронным устройством. Способ является выполнимым посредством электронного устройства. Способ содержит: определение, посредством электронного устройства, присутствия по меньшей мере одного стороннего объекта вокруг SDC; определение, посредством электронного устройства, текущего местоположения стороннего объекта; формирование, посредством электронного устройства, множества прогнозных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта, причем по меньшей мере одна из множества траекторий включает в себя маневр, выполнимый, посредством стороннего объекта, в будущем местоположении стороннего объекта в качестве части выполнения по меньшей мере одной из множества траекторий; вычисление по меньшей мере для одной из множества траекторий, включающей в себя маневр, выполнимый в будущем местоположении стороннего объекта, соответствующего профиля торможения, ассоциированного со сторонним объектом, причем профиль торможения указывает маневр для регулирования скорости стороннего объекта, чтобы обеспечивать возможность стороннему объекту выполнять маневр в будущем местоположении стороннего объекта; в ответ на то, что соответствующий профиль торможения составляет выше предварительно определенного порогового значения, исключение ассоциированной одной из по меньшей мере одной из множества траекторий из будущей обработки; определение, посредством электронного устройства, траектории SDC на основе оставшихся из множества прогнозных траекторий для стороннего объекта.
[0016] В некоторых реализациях способа сторонний объект представляет собой один из множества сторонних объектов, расположенных вокруг SDC.
[0017] В некоторых реализациях способа способ осуществляют для каждого из множества сторонних объектов.
[0018] В некоторых реализациях способа способ осуществляется для каждого из множества сторонних объектов.
[0019] В некоторых реализациях способа способ дополнительно содержит выбор стороннего объекта из множества сторонних объектов и осуществление способа только для стороннего объекта.
[0020] В некоторых реализациях способа выбор стороннего объекта из множества сторонних объектов содержит применение правила выбора.
[0021] В некоторых реализациях способа правило выбора указывает водителя, ассоциированного со сторонним объектом, с большой вероятностью представляющего собой нарушителя правил дорожного движения.
[0022] В некоторых реализациях способа предварительно определенное пороговое значение указывает маловероятность маневра, выполнимого в будущем местоположении стороннего объекта.
[0023] В некоторых реализациях способа маловероятность маневра, выполнимого в будущем местоположении стороннего объекта, указывает физическую невозможность маневра с учетом профиля торможения.
[0024] В некоторых реализациях способа предварительно определенное пороговое значение определяется с использованием кинематической модели.
[0025] В некоторых реализациях способа кинематическая модель основана на профиле наиболее резкого торможения.
[0026] В некоторых реализациях способа кинематическая модель основана по меньшей мере на одном из следующего: профиль минимального торможения, профиль среднего торможения и профиль наиболее резкого торможения.
[0027] В некоторых реализациях способа предварительно определенное пороговое значение дополнительно основано на модели рывка.
[0028] В некоторых реализациях способа предварительно определенное пороговое значение составляет +/-3 м/с2.
[0029] В некоторых реализациях способа сторонний объект представляет собой динамический сторонний объект.
[0030] В некоторых реализациях способа множество прогнозных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта представляют собой множество маневров посредством стороннего объекта, при этом данный один из множества маневров является выполнимым в соответствующем одном из будущих местоположений стороннего объекта, и при этом способ является выполнимым для каждого из будущих местоположений стороннего объекта.
[0031] В соответствии со вторым широким аспектом настоящей технологии предусмотрено электронное устройство. Электронное устройство содержит: процессор; интерфейс связи для обмена данными с датчиком, смонтированным на беспилотном автомобиле (SDC). Процессор выполнен с возможностью: определять, посредством электронного устройства, присутствие по меньшей мере одного стороннего объекта вокруг SDC; определять текущее местоположение стороннего объекта; формировать множество прогнозных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта, причем по меньшей мере одна из множества траекторий включает в себя маневр, выполнимый, посредством стороннего объекта, в будущем местоположении стороннего объекта в качестве части выполнения по меньшей мере одной из множества траекторий; вычислять по меньшей мере для одной из множества траекторий, включающей в себя маневр, выполнимый в будущем местоположении стороннего объекта, соответствующий профиль торможения, ассоциированный со сторонним объектом, причем профиль торможения указывает маневр для регулирования скорости стороннего объекта, чтобы обеспечивать возможность стороннему объекту выполнять маневр в будущем местоположении стороннего объекта; в ответ на то, что соответствующий профиль торможения составляет выше предварительно определенного порогового значения, исключать ассоциированную одну из по меньшей мере одной из множества траекторий из будущей обработки; определять траекторию SDC на основе оставшихся из множества прогнозных траекторий для стороннего объекта.
[0032] В некоторых реализациях электронного устройства, процессор дополнительно выполнен с возможностью выбирать сторонний объект из множества сторонних объектов на основе правила выбора.
[0033] В некоторых реализациях электронного устройства, процессор, чтобы определять предварительно определенное пороговое значение, дополнительно выполнен с возможностью доступа к кинематической модели.
[0034] В контексте настоящего описания изобретения, "сервер" представляет собой компьютерную программу, которая выполняется на соответствующем аппаратном обеспечении и допускает прием запросов (например, из клиентских устройств) по сети и выполнение этих запросов либо инструктирование выполнения этих запросов. Аппаратное обеспечение может реализовываться как один физический компьютер или одна физическая компьютерная система, но ни одно из означенного не должно обязательно иметь место относительно настоящей технологии. В настоящем контексте, использование выражения "сервер" не имеет намерение означать то, что каждая задача (например, принимаемые инструкции или запросы) или любая конкретная задача должна приниматься, выполняться или инструктироваться для выполнения посредством одинакового сервера (т.е. одинакового программного обеспечения и/или аппаратного обеспечения); оно имеет намерение означать то, что любое число программных элементов или аппаратного обеспечения может быть предусмотрено при приеме/отправке, выполнении или инструктировании для выполнения любой задачи или запроса либо результатов любой задачи или запроса; и все это программное обеспечение и аппаратное обеспечение может представлять собой один сервер либо несколько серверов, причем все из означенного включается в выражение "по меньшей мере один сервер".
[0035] В контексте настоящего описания изобретения "электронное устройство" представляет собой любое компьютерное аппаратное обеспечение, которые допускают выполнение программного обеспечения, соответствующего рассматриваемой релевантной задаче. В контексте настоящего описания изобретения, термин "электронное устройство" подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств и клиентских устройств; тем не менее, это не должно обязательно иметь место относительно настоящей технологии. Таким образом, некоторые (неограничивающие) примеры электронных устройств включают в себя персональные компьютеры (настольные компьютеры, переносные компьютеры, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает того, что оно не может функционировать в качестве сервера для других электронных устройств. Использование выражения "электронное устройство" не исключает использование нескольких клиентских устройств при приеме/отправке, выполнении или инструктировании для выполнения любой задачи или запроса либо результатов любой задачи или запроса, или этапов любого способа, описанного в данном документе.
[0036] В контексте настоящего описания изобретения "клиентское устройство" представляет собой любое компьютерное аппаратное обеспечение, которое допускает выполнение программного обеспечения, соответствующего рассматриваемой релевантной задаче. В контексте настоящего описания изобретения, в общем, термин "клиентское устройство" ассоциирован с пользователем клиентского устройства. Таким образом, некоторые (неограничивающие) примеры клиентских устройств включают в себя персональные компьютеры (настольные компьютеры, переносные компьютеры, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует отметить, что устройство, выступающее в качестве клиентского устройства в настоящем контексте, не исключается из выступания в качестве сервера для других клиентских устройств. Использование выражения "клиентское устройство" не исключает использование нескольких клиентских устройств при приеме/отправке, выполнении или инструктировании для выполнения любой задачи или запроса либо результатов любой задачи или запроса, или этапов любого способа, описанного в данном документе.
[0037] В контексте настоящего описания изобретения выражение "информация" включает в себя информацию вообще любого характера или вида, допускающую сохранение в базе данных. Таким образом, информация включает в себя, но не только, аудиовизуальные произведения (изображения, фильмы, звукозаписи, презентации и т.д.), данные (данные местоположения, числовые данные и т.д.), текст (мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[0038] В контексте настоящего описания изобретения выражение "программный компонент" имеет намерение включать в себя программное обеспечение (соответствующее конкретному аппаратному контексту), которое является необходимым и достаточным для того, чтобы осуществлять конкретную упоминаемую функцию(и).
[0039] В контексте настоящего описания изобретения выражение "компьютерные носители хранения информации" (также называемые "носителями хранения данных") имеет намерение включать в себя носители вообще любого характера и вида, в том числе, без ограничения, RAM, ROM, диски (CD-ROM, DVD, гибкие диски, накопители на жестких дисках и т.д.), флэш-накопители, твердотельные накопители, накопители на ленте и т.д. Множество компонентов могут комбинироваться, чтобы формировать компьютерные носители хранения информации, включающие в себя два или более компонентов носителей одинакового типа и/или два или более компонентов носителей различных типов.
[0040] В контексте настоящего описания изобретения "база данных" представляет собой любую структурированную совокупность данных, независимо от ее конкретной структуры, программного обеспечения управления базами данных или компьютерного аппаратного обеспечения, на котором данные сохраняются, реализуются или становятся доступными иными способами для использования. База данных может постоянно размещаться на одинаковом аппаратном обеспечении, что и процесс, который сохраняет или использует информацию, сохраненную в базе данных, либо она может постоянно размещаться на отдельном аппаратном обеспечении, таком как выделенный сервер или множество серверов.
[0041] В контексте настоящего описания изобретения слова "первый", "второй", "третий" и т.д. использованы в качестве прилагательных только для целей обеспечения различения существительных, которые они модифицируют, друг от друга, а не для целей описания конкретных взаимосвязей между этими существительными. Таким образом, например, следует понимать, что использование терминов "первая база данных" и "третий сервер" не имеет намерение подразумевать конкретный порядок, тип, хронологию, иерархию или ранжирование (например) относительно сервера, и их использование не имеет намерение (непосредственно) подразумевать то, что "второй сервер" должен обязательно существовать в любой данной ситуации. Дополнительно, как пояснено в данном документе в других контекстах, ссылка на "первый" элемент и "второй" элемент не исключает того, что два элемента представляют собой одинаковый фактический элемент реального мира. Таким образом, например, в некоторых случаях, "первый" сервер и "второй" сервер могут представлять собой одинаковые программные и/или аппаратные компоненты, в других случаях они могут представлять собой различные программные и/или аппаратные компоненты.
[0042] Реализации настоящей технологии имеют по меньшей мере одну из вышеуказанных целей и/или аспектов, но не обязательно имеют все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые получены в результате попытки достигать вышеуказанной цели, могут не удовлетворять этой цели и/или могут удовлетворять другим целям, не изложенным конкретно в данном документе.
[0043] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии должны становиться очевидными из нижеприведенного описания, прилагаемых чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[0044] Эти и другие признаки, аспекты и преимущества настоящей технологии должны становиться более понятными при рассмотрении нижеприведенного описания, прилагаемой формулы изобретения и прилагаемых чертежей, на которых:
[0045] Фиг. 1 иллюстрирует принципиальную схему примерной компьютерной системы для реализации конкретных вариантов осуществления систем и/или способов настоящей технологии.
[0046] Фиг. 2 иллюстрирует сетевое вычислительное окружение, подходящее для использования с некоторыми реализациями настоящей технологии.
[0047] Фиг. 3 иллюстрирует пример сценария для определения, посредством процессора электронного устройства сетевого вычислительного окружения по фиг. 2, траектории для транспортного средства, присутствующего в сетевом вычислительном окружении по фиг. 2, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
[0048] Фиг. 4 схематично иллюстрирует процесс для вычисления данного профиля торможения для стороннего объекта, расположенного в окружающей области транспортного средства, присутствующего в сетевом вычислительном окружении по фиг. 2, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
[0049] Фиг. 5 иллюстрирует блок-схему последовательности операций способа для формирования траектории для транспортного средства, присутствующего в сетевом вычислительном окружении по фиг. 2, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
Подробное описание изобретения
[0050] Примеры и условный язык, изложенный в данном документе, преимущественно имеют намерение помогать читателю в понимании принципов настоящей технологии, а не ограничивать ее объем такими конкретно изложенными примерами и условиями. Следует принимать во внимание, что специалисты в данной области техники могут разрабатывать различные компоновки, которые, хотя и не описаны или показаны явно в данном документе, тем не менее, осуществляют принципы настоящей технологии и включаются в пределы ее сущности и объема.
[0051] Кроме того, в качестве помощи в понимании, нижеприведенное описание может описывать относительно упрощенные реализации настоящей технологии. Специалисты в данной области техники должны понимать, что различные реализации настоящей технологии могут иметь большую сложность.
[0052] В некоторых случаях, также может быть изложено то, что считается полезными примерами модификаций настоящей технологии. Это осуществляется просто в качестве помощи в понимании и, кроме того, не должно не задавать объем или излагать ограничения настоящей технологии. Эти модификации не представляют собой исчерпывающий список, и специалисты в данной области техники могут вносить другие модификации при одновременном пребывании в пределах объема настоящей технологии. Дополнительно, если примеры модификаций не изложены, не следует интерпретировать это таким образом, что модификации невозможны, и/или таким образом, что то, что описывается, представляет собой единственный способ реализации этого элемента настоящей технологии.
[0053] Кроме того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры, имеют намерение охватывать их конструктивные и функциональные эквиваленты независимо от того, являются они известными в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области техники должны признавать, что блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, осуществляющей принципы настоящей технологии. Аналогично, следует принимать во внимание, что все блок-схемы последовательности операций, блок-схемы, схемы переходов состояния, псевдокод и т.п. представляют различные процессы, которые могут представляться большей частью на компьютерно-читаемых носителях, и в силу этого выполняются посредством компьютера или процессора, независимо от того, показан ли в явной форме такой компьютер или процессор.
[0054] Функции различных элементов, показанных на чертежах, включающих в себя все функциональные блоки, помеченные как "процессор", могут предоставляться с помощью специализированного аппаратного обеспечения, а также аппаратного обеспечения, допускающих выполнение программного обеспечения, в ассоциации с надлежащим программным обеспечением. При предоставлении посредством процессора, функции могут предоставляться посредством одного специализированного процессора, посредством одного совместно используемого процессора или посредством множества отдельных процессоров, некоторые из которых могут совместно использоваться. Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как означающее исключительно аппаратное обеспечение, допускающие выполнение программного обеспечения, и может неявно включать в себя, без ограничений, аппаратное обеспечение процессора цифровых сигналов (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянное запоминающее устройство (ROM) для сохранения программного обеспечения, оперативное запоминающее устройство (RAM) и энергонезависимое устройство хранения. Также может быть включено другое аппаратное обеспечение, обычное и/или специализированное.
[0055] Программные модули или просто модули, которые подразумеваются как программные, могут представляться в данном документе в качестве любой комбинации элементов блок-схемы последовательности операций способа или других элементов, указывающих выполнение этапов процесса, и/или текстового описания. Такие модули могут выполняться посредством аппаратного обеспечения, которое показано явно или неявно.
[0056] С учетом этих основных принципов, далее рассматриваются некоторые неограничивающие примеры, чтобы иллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[0057] При обращении первоначально к фиг. 1 показана компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, причем компьютерная система 100 содержит различные аппаратные компоненты, включающие в себя один или более одно- или многоядерных процессоров, совместно представленных посредством процессора 110, твердотельный накопитель 120, запоминающее устройство 130, которое может представлять собой оперативное запоминающее устройство или любой другой тип запоминающего устройства.
[0058] Связь между различными компонентами компьютерной системы 100 может осуществляться посредством одной или более внутренних и/или внешних шин (не показаны) (например, посредством PCI-шины, универсальной последовательной шины, шины по стандарту IEEE1394 Firewire, шины SCSI, шины Serial ATA и т.д.), с которыми электронно соединяются различные аппаратные компоненты. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 120 сохраняет программные инструкции, подходящие для загрузки в запоминающее устройство 130 и выполняемые посредством процессора 110 для множества задач обработки. Например, программные инструкции могут представлять собой часть управляющего приложения транспортного средства, выполнимого посредством процессора 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или необязательные компоненты (не проиллюстрированы), такие как модули сетевой связи, модули локализации и т.п.
[0059] Следует отметить, что компьютерная система 100 может иметь дополнительные и/или необязательные компоненты, такие как модуль 140 сетевой связи для связи, через сеть связи (например, через сеть 245 связи, проиллюстрированную на фиг. 2), с другими электронными устройствами и/или серверами, модули локализации (не проиллюстрированы) и т.п.
Сетевое компьютерное окружение
[0060] Фиг. 2 иллюстрирует сетевое компьютерное окружение 200, подходящее для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевое компьютерное окружение 200 содержит электронное устройство 210, ассоциированное с транспортным средством 220 и/или ассоциированное с пользователем (не проиллюстрирован), который может управлять транспортным средством 220, сервер 235, поддерживающий связь с электронным устройством 210 через сеть 245 связи (например, через Интернет и т.п., как подробнее описывается ниже в данном документе).
[0061] Опционально сетевое компьютерное окружение 200 также может включать в себя один или более спутников (не проиллюстрированы), передающих и/или принимающих GPS-сигнал в/из электронного устройства 210. Следует понимать, что настоящая технология не ограничена GPS и может использовать технологию позиционирования, отличную от GPS. Следует отметить, что один или более спутников могут опускаться, по меньшей мере, в некоторых вариантах осуществления настоящей технологии.
[0062] Транспортное средство 220, с которым ассоциировано электронное устройство 210, может содержать любое перевозное транспортное средство, такое как личный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Хотя транспортное средство 220 проиллюстрировано как наземное транспортное средство, это может не иметь место в каждом варианте осуществления настоящей технологии. Например, транспортное средство 220 может представлять собой водное судно, такое как лодка, или воздушное судно, такое как беспилотный летательный аппарат.
[0063] Транспортное средство 220 может представлять собой управляемое пользователем, транспортное средство без водителя либо любое другое транспортное средство, выполненное с возможностью работать автоматизированным способом. Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, причем эти конкретные параметры включают в себя: производителя транспортных средств, модель транспортного средства, год изготовления транспортного средства, вес транспортного средства, габариты транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип приводной передачи (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[0064] Реализация электронного устройства 210 не ограничена конкретным образом, но в качестве примера, электронное устройство 210 может реализовываться как блок управления двигателем транспортного средства, CPU транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшетный компьютер, персональный компьютер, встроенный в транспортное средство 220, и т.п. Таким образом, следует отметить, что электронное устройство 210 может или не может быть постоянно ассоциировано с транспортным средством 220. Дополнительно или альтернативно, электронное устройство 210 может реализовываться в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В конкретных вариантах осуществления, электронное устройство 210 имеет дисплей 270.
[0065] Электронное устройство 210 может содержать часть или все компоненты компьютерной системы 100, проиллюстрированной на фиг. 1. В конкретных вариантах осуществления, электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, твердотельный накопитель 120 и запоминающее устройство 130. Другими словами, электронное устройство 210 содержит аппаратное обеспечение и/или программное обеспечение, и/или микропрограммное обеспечение либо комбинацию вышеозначенного для обработки данных, как подробнее описано ниже.
Сеть связи
[0066] В некоторых неограничивающих вариантах осуществления настоящей технологии сеть 245 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления, сеть связи может реализовываться как любая подходящая локальная вычислительная сеть (LAN), глобальная вычислительная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации для сети связи предназначаются только для целей иллюстрации. То, как реализуется линия связи (без отдельной ссылки с номером) между электронным устройством 210 и сетью 245 связи, должно зависеть, в числе прочего, от того, как реализуется электронное устройство 210. Просто в качестве примера, а не в качестве ограничения, в тех вариантах осуществления настоящей технологии, в которых электронное устройство 210 реализуется как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может реализовываться как линия беспроводной связи. Примеры линий беспроводной связи включают в себя, но не только, сетевую 3G-линию связи, сетевую 4G-линию связи и т.п. Сеть 245 связи также может использовать беспроводное соединение с сервером 235.
Сервер
[0067] В некоторых неограничивающих вариантах осуществления настоящей технологии сервер 235 реализуется как традиционный компьютер-сервер и может содержать часть или все компоненты компьютерной системы 100 по фиг. 1. В одном неограничивающем примере, сервер 235 реализуется как сервер Dell™ PowerEdge™ под управлением операционной системы Windows Server™ Microsoft™, но также может реализовываться в любом другом подходящем аппаратном обеспечении, программном обеспечении и/или микропрограммном обеспечении либо в комбинации вышеозначенного. В проиллюстрированных неограничивающих вариантах осуществления настоящей технологии, сервер представляет собой один сервер. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны), функциональность сервера 235 может распределяться и может реализовываться через несколько серверов.
[0068] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235, чтобы принимать одно или более обновлений. Обновления могут представлять собой, но не только, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления прогноза погоды и т.п. В некоторых неограничивающих вариантах осуществления настоящей технологии, процессор 110 также может быть выполнен с возможностью передавать в сервер 235 определенные рабочие данные, такие как проезжаемые маршруты, данные трафика, данные рабочих характеристик и т.п. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут шифроваться и/или анонимизироваться.
[0069] В некоторых неограничивающих вариантах осуществления настоящей технологии сервер 235 может иметь доступ (локально и/или удаленно) к информации, указывающей дорожную карту. Вообще говоря, дорожная карта представляет собой карту дорог, которые расположены в городе, административном районе и/или других областях. Например, секция дорожной карты может включать в себя такую информацию, как, но не только: присутствие дорог в этой секции, числе полос движения на этих дорогах, присутствие перекрестков и т.п.
[0070] В других неограничивающих вариантах осуществления настоящей технологии сервер 235 может иметь доступ (локально и/или удаленно) к информации, указывающей правила дорожного движения, ассоциированные с дорожной картой. Вообще говоря, правила дорожного движения представляют законодательство в сфере дорожного движения, которое определяется посредством органа, обладающего соответствующей юрисдикцией, и которое является применимым, по меньшей мере, на некоторых участках дорожной карты. Например, правила дорожного движения, ассоциированные с данной секцией дорожной карты, представляют законодательство в сфере дорожного движения, которое является применимым для этой данной секции дорожной карты, такое как, но не только: предварительно определенное направление потока трафика каждой полосы движения в секции дорожной карты, присутствие конкретных дорожных знаков, регулирующих трафик в этой секции дорожной карты, включающих в себя знаки остановки, знаки "уступи дорогу", дорожные информационные указатели и табло, ограничения скорости, индикаторы других типов законов или правил в сфере дорожного движения и т.п.
[0071] Предполагается, что сервер 235 может быть выполнен с возможностью предоставлять процессору 110 (например, процессор 110 электронного устройства 210) доступ к информации, указывающей (i) секцию дорожной карты, соответствующую окрестности транспортного средства 220, и (ii) правила дорожного движения, ассоциированные с этой секцией дорожной карты.
[0072] С этой целью в некоторых вариантах осуществления, сервер 235 может принимать запрос, отправленный посредством электронного устройства 210 для предоставления доступа к информации, указывающей секцию дорожной карты (соответствующую окрестности транспортного средства 220) и надлежащим образом ассоциированные правила дорожного движения. Например, запрос, отправленный посредством электронного устройства 210, может включать в себя информацию, указывающую позицию транспортного средства (возможно в глобальных координатах) для транспортного средства 220. Как результат, сервер 235 может предоставлять электронному устройству 210 доступ к информации (или предоставлять саму информацию), указывающей секцию дорожной карты, которая включает в себя позицию транспортного средства для транспортного средства 220 и надлежащим образом ассоциированные правила дорожного движения.
[0073] Ниже в данном документе подробнее описывается то, для какой цели сервер 235 может быть выполнен с возможностью предоставлять электронному устройству 210 доступ к информации, указывающей секцию дорожной карты, соответствующую окрестности транспортного средства 220, и правила дорожного движения, ассоциированные с этой секцией дорожной карты.
[0074] Тем не менее, электронное устройство 210 может быть выполнено с возможностью получать доступ к информации (или получать непосредственно информацию), указывающей секцию дорожной карты, соответствующую окрестности транспортного средства 220, и надлежащим образом ассоциированные правила дорожного движения, не через сервер 235. Например, информация, указывающая дорожную карту и правила дорожного движения, может предварительно загружаться и предварительно сохраняться посредством электронного устройства 210, без отступления от объема настоящей технологии.
Система датчиков
[0075] В соответствии, по меньшей мере, с некоторыми вариантами осуществления настоящей технологии, электронное устройство 210 функционально соединяется с системой 230 датчиков. Вообще говоря, система 230 датчиков выполнена с возможностью захватывать данные/сигналы относительно окрестности транспортного средства 220. Система 230 датчиков функционально соединяется с электронным устройством 210, в числе прочего, для обработки такой захваченной информации (данных/сигналов) посредством электронного устройства 210. Как подробнее описывается ниже в данном документе, процессор 110 может быть выполнен с возможностью обрабатывать такую захваченную информацию относительно окрестности транспортного средства 220 для принятия решений и/или для работы транспортного средства 220.
[0076] Местоположение системы 230 датчиков относительно транспортного средства 220 не ограничено конкретным образом. Например, система 230 датчиков может монтироваться в салоне, в верхнем участке ветрового стекла транспортного средства 220, но другие местоположения находятся в пределах объема настоящего раскрытия сущности, в том числе заднее окно, боковые окна, передний капот, крыша, решетка радиатора или передний бампер транспортного средства 220. Опционально, система 230 датчиков может монтироваться в выделенном корпусе (не проиллюстрирован), смонтированном поверх транспортного средства 220. Тем не менее, также предполагается, что различные компоненты и/или подсистемы системы 230 датчиков могут монтироваться в различных местоположениях на транспортном средстве 220, без отступления от объема настоящей технологии.
[0077] В некоторых неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может калиброваться. Эта калибровка может выполняться во время изготовления и/или настройки транспортного средства 220. Альтернативно, в любое подходящее время после этого или, другими словами, калибровка может выполняться во время модернизации транспортного средства 220 за счет системы 230 датчиков. Альтернативно, калибровка может выполняться во время оснащения транспортного средства 220 системой 230 датчиков.
[0078] В других неограничивающих вариантах осуществления настоящей технологии калибровка определенных компонентов системы 230 датчиков может реализовываться в ходе работы транспортного средства 220, как описано в находящейся в совместном владении заявке на патент, озаглавленной "METHODS AND SYSTEMS FOR CALIBRATING MULTIPLE LIDAR SENSORS" с присвоенной адвокатской выпиской номер 102690-007 (номер заявки еще не доступен); содержимое которой полностью содержится в данном документе по ссылке.
[0079] Возвращаясь к описанию конфигурации системы 230 датчиков в некоторых неограничивающих вариантах осуществления, система 230 датчиков может быть выполнена с возможностью собирать самую разнообразную информацию (данные/сигналы) относительно окрестности транспортного средства 220 и, с этой целью, может содержать множество компонентов и/или множество подсистем, выполненных с возможностью захватывать эту разнообразную информацию.
[0080] В некоторых вариантах осуществления система 230 датчиков может содержать камеру. То, как реализуется камера, не ограничено конкретным образом. Например, в вариантах осуществления настоящей технологии, камера может реализовываться как монокамера с разрешением, достаточным для того, чтобы обнаруживать объекты (например, такие как находящиеся в соседней полосе движения транспортные средства и/или дорожные знаки) на предварительно определенном расстоянии вплоть до приблизительно 50 м (хотя камеры с другими разрешениями и дальностями находятся в пределах объема настоящего раскрытия сущности). Также предполагается, что система 230 датчиков может содержать множество камер. Например, множество камер могут иметь достаточное число камер для того, чтобы захватывать окружающее/панорамное цифровое изображение окрестности транспортного средства 220.
[0081] В некоторых неограничивающих вариантах осуществления настоящей технологии камера (либо одна или более камер системы 230 датчиков) может быть выполнена с возможностью захватывать предварительно определенный участок окрестности транспортного средства 220. Например, одна или более камер могут быть выполнены с возможностью захватывать цифровые изображения (или последовательность цифровых изображений), которые представляют приблизительно 90 градусов окрестностей транспортного средства 220, которая располагается вдоль пути перемещения транспортного средства 220. Тем не менее, в другом примере, одна или более камер могут быть выполнены с возможностью захватывать цифровые изображения, которые представляют приблизительно 360 градусов окрестностей транспортного средства 220, которые располагаются вдоль пути перемещения транспортного средства 220, без отступления от объема настоящей технологии. В конкретном неограничивающем примере, одна или более камер системы 230 датчиков могут иметь тип, предлагаемый компанией FLIR Integrated Imaging Solutions Inc., 12051 Riverside Way, Ричмонд, BC, V6W 1K7, Канада. Следует четко понимать, что система 230 датчиков может реализовываться в любом другом подходящем оборудовании.
[0082] В других вариантах осуществления система 230 датчиков может содержать другие компоненты и/или другие подсистемы, которые функционально соединяются с электронным устройством 210. Например, система 230 датчиков может содержать: блок инерциальных измерений (IMU), (лидарную) систему оптического обнаружения и дальнометрии, радарную систему, сонарную систему, другие сенсорные подсистемы на основе изображений и другие типы подсистем, которые выполнены с возможностью захватывать информацию (данные/сигналы) относительно окрестности транспортного средства 220.
[0083] Как упомянуто выше, система 230 датчиков может быть выполнена с возможностью захватывать разнообразную информацию относительно окрестности транспортного средства 220. Например, по меньшей мере, некоторая информация, захваченная посредством системы 230 датчиков относительно окрестности транспортного средства 220, может содержать связанную с объектами информацию, такую как информация относительно находящихся в соседней полосе движения транспортных средств и/или дорожных знаков около транспортного средства 220. Дополнительно, информация относительно окрестности транспортного средства 220 может включать в себя другие типы данных позиции, которые могут (i) захватываться посредством системы 230 датчиков и (ii) передаваться в процессор 110.
[0084] Например, система 230 датчиков может быть выполнена с возможностью захватывать данные, которые, после обработки, обеспечивают возможность электронному устройству 210 обнаруживать присутствие, позицию и/или ориентацию объектов, таких как транспортное средство 220, находящиеся в соседней полосе движения транспортные средства и/или дорожные знаки. В другом примере, система 230 датчиков может быть выполнена с возможностью захватывать данные, которые, после обработки, обеспечивают возможность электронному устройству 210 определять кинематические данные, ассоциированные с различными объектами, которые расположены в окрестности транспортного средства 220, такие как, но не только: позиции объектов, скорость (speed) и/или быстрота (velocity) объектов, ускорение объектов и т.п.
[0085] Также предполагается, что система 230 датчиков может быть выполнена с возможностью захватывать данные, которые, после обработки, обеспечивают возможность электронному устройству 210 определять, в числе прочего: (i) позицию транспортного средства для транспортного средства 220 (потенциально в глобальных координатах) на основе сигналов (например, GPS-сигналов) из множества спутников, (ii) расстояния от транспортного средства 220 до объектов в пределах окрестности транспортного средства 220 для определения позиции и ориентации транспортного средства 220 и объектов в пределах окрестности транспортного средства 220, и (iii) любые другие данные, которые могут использоваться для того, чтобы определять текущее состояние транспортного средства 220 и/или текущее состояние окрестности транспортного средства 220, включающие в себя присутствие, позицию и ориентацию находящихся в соседней полосе движения транспортных средств относительно транспортного средства 220 и/или иным образом относительно окрестности транспортного средства 220 (такой как, например, перекресток).
[0086] Система 230 датчиков и/или процессор 110 также могут функционально соединяться с одной или более систем транспортного средства для транспортного средства 220. Например, система 230 датчиков может функционально соединяться с тормозной системой транспортного средства, тяговой движительной системой транспортного средства, системой руления транспортного средства и т.п. В некоторых неограничивающих вариантах осуществления настоящей технологии, система 230 датчиков и/или процессор 110 могут получать информацию, указывающую рабочие характеристики одной или более систем транспортного средства для транспортного средства 220.
Процессор
[0087] Как упомянуто выше, процессор 110 (такой как, например, процессор 110 электронного устройства 210) выполнен с возможностью, в числе прочего, обрабатывать (i) информацию, которая предоставляется в него посредством системы 230 датчиков, (ii) информацию, которая указывает секцию дорожной карты, соответствующую окрестности транспортного средства 220, и (iii) информацию, которая указывает правила дорожного движения, ассоциированные с этой секцией дорожной карты, для целей принятия решений и/или работы транспортного средства 220 (к примеру, для формирования маневров и других траекторий для транспортного средства 220).
[0088] В соответствии с неограничивающими вариантами осуществления настоящей технологии, по меньшей мере, на основе вышеприведенных данных, процессор 110 может быть выполнен с возможностью определять траекторию для транспортного средства 220 относительно, по меньшей мере, одного стороннего объекта, перемещающегося в данной секции дорожной карты.
[0089] В этом отношении, процессор 110 может быть выполнен с возможностью (1) формировать множество прогнозных траекторий, по меньшей мере, для одного стороннего объекта, например, на основе его текущих параметров движения и местоположения; (2) определять, во множестве прогнозных траекторий, ассоциированных, по меньшей мере, с одним сторонним объектом, одну или более маловероятных траекторий; и (3) исключать одну или более маловероятных траекторий из множества прогнозных траекторий для последующей обработки посредством процессора 110. По меньшей мере, некоторые неограничивающие варианты осуществления настоящей технологии могут приводить к более быстрой обработке и/или к менее строгим требованиям к компьютерным ресурсам.
[0090] В неограничивающих вариантах осуществления настоящей технологии, "маловероятная траектория" должна пониматься как означающая любую траекторию, которая не может физически выполняться посредством, по меньшей мере, одного стороннего объекта (также упоминается в данном документе как "физически невозможная" траектория), т.е. траекторию, по которой, по меньшей мере, один сторонний объект, с учетом своих текущих параметров движения (например, значения мгновенной скорости) или других факторов, физически не может перемещаться или иным образом перемещается по такой траектории, с большой вероятностью должна быть ассоциирована с более высоким риском дорожно-транспортного происшествия между другими сторонними объектами и транспортным средством 220.
[0091] В связи с этим, в неограничивающих вариантах осуществления настоящей технологии, маловероятные траектории включают в себя траектории, которые включают в себя маневры, такие как повороты, повороты на 180 градусов, смена полосы движения и т.п.
[0092] Иначе говоря, неограничивающие варианты осуществления настоящей технологии направлены на способ для отфильтровывания, посредством процессора 110, маловероятных траекторий из множества прогнозных траекторий, ассоциированных, по меньшей мере, с одним сторонним объектом, и использования "уточненного" множества прогнозных траекторий для последующей обработки.
[0093] В неограничивающих вариантах осуществления настоящей технологии, последующая обработка такого сформированного множества прогнозных траекторий может включать в себя формирование траектории для транспортного средства 220. В частности, процессор 110 может инструктировать, на основе такой сформированной траектории для транспортного средства 220, в некоторый момент времени, транспортному средству 220 замедляться или в противном случае активно ускоряться, выполнять маневр (например, смену полосы движения) и т.п., чтобы исключать или снижать риск столкновения с любыми сторонними объектами в данной секции дорожной карты.
[0094] В неограничивающих вариантах осуществления настоящей технологии, по меньшей мере, один сторонний объект может содержать динамический сторонний объект, включающий в себя другое транспортное средство (такое как автомобиль, грузовик и т.п.), велосипедиста, заблудившееся животное и т.д.
[0095] Далее описывается то, как процессор 110 выполнен с возможностью определять маловероятные траектории во множестве прогнозных траекторий, ассоциированных, по меньшей мере, с одним сторонним объектом, со ссылкой на фиг. 3 и 4.
[0096] Со ссылкой на фиг. 3, проиллюстрирован пример дорожного сценария для определения траектории для транспортного средства 220, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
[0097] В вариантах осуществления по фиг. 3, транспортное средство 220 движется в полосе движения. Окрестность транспортного средства 220 проиллюстрирована посредством секции 340 дорожной карты. Дополнительно, в секции 340 дорожной карты, проиллюстрирован сторонний объект 302, едущий в соседней полосе движения относительно полосы движения, в которой движется транспортное средство 220. Присутствие стороннего объекта 302 определено посредством процессора 110 на основе данных, захваченных посредством системы 230 датчиков.
[0098] Из фиг. 3 можно принимать во внимание, что секция 340 дорожной карты проиллюстрирована посредством ее трех визуальных представлений: первого визуального представления 300, второго визуального представления 310 и третьего визуального представления 320, каждое из которых надлежащим образом соответствует различным моментам времени.
[0099] Более конкретно, каждое из визуальных представлений 300, 310 и 320, в общем, иллюстрирует секцию 340 дорожной карты, имеющую (1) две полосы движения (протягивающиеся слева направо в ориентации по фиг. 3) и (2) сторонний объект 302. Только в качестве иллюстрации, предположим, что как транспортное средство 220, так и сторонний объект 302 движутся в направлении трафика, указываемом посредством стрелок 312. Дополнительно, транспортное средство 220 и сторонний объект 302 движутся в соответствующих соседних полосах движения. Дополнительно следует отметить, что визуальные представления 300, 310 и 320 проиллюстрированы только для целей иллюстрации сценария, и в силу этого процессор 110 фактически не отображает визуальные представления 300, 310 и 320.
[0100] Из фиг. 3 дополнительно можно принимать во внимание, что визуальные представления 300, 310 и 320 также включают в себя представления, по меньшей мере, некоторых правил дорожного движения, ассоциированных с секцией 340 дорожной карты. Например, по меньшей мере, некоторые правила дорожного движения могут предписывать направления трафика, которые должны соблюдать движущиеся транспортные средства и которые проиллюстрированы посредством стрелок 312. В другом примере, по меньшей мере, некоторые правила дорожного движения дополнительно могут предписывать ограничение максимальной разрешенной скорости, проиллюстрированное посредством представления дорожного знака 322. Тем не менее, следует отметить, что визуальные представления, по меньшей мере, некоторых правил 312 и 322 дорожного движения проиллюстрированы только для целей иллюстрации примерного сценария, и в силу этого процессор 110 не должен фактически отображать визуальные представления, по меньшей мере, некоторых правил 312 и 322 дорожного движения.
[0101] В завершение, каждое из визуальных представлений 300, 310 и 320 также иллюстрирует ось 332 координат, протягивающуюся слева направо (в ориентации по фиг. 3) и совпадающую с направлением трафика в секции 340 дорожной карты. Ось 332 координат выступает исключительно в качестве помощи в понимании неограничивающих вариантов осуществления настоящей технологии и в силу этого не должна обязательно отображаться посредством процессора 110.
[0102] В некоторых неограничивающих вариантах осуществления настоящей технологии, сторонний объект 302 может представлять собой один из множества сторонних объектов (не проиллюстрированы), присутствующих в секции 340 дорожной карты.
[0103] Таким образом, в некоторых неограничивающих вариантах осуществления настоящей технологии, процессор 110 может быть выполнен с возможностью формировать траекторию для транспортного средства 220 на основе соответствующих множеств прогнозных траекторий множества сторонних объектов (не проиллюстрированы). Следовательно, хотя нижеприведенное описание предоставлено относительно стороннего объекта 302, следует четко понимать, что это описание может применяться, с необходимыми изменениями, к каждому из множества сторонних объектов (не проиллюстрированы), к примеру, к десяткам или сотням сторонних объектов, без отступления от объема настоящей технологии.
[0104] В других неограничивающих вариантах осуществления настоящей технологии, для формирования траектории для транспортного средства 220, после определения присутствия каждого из множества сторонних объектов (не проиллюстрированы), процессор 110 может быть выполнен с возможностью выбирать, на основе правила выбора, только сторонний объект 302 (или поднабор сторонних объектов, включающих в себя сторонний объект 302) из множества сторонних объектов (не проиллюстрированы).
[0105] В неограничивающих вариантах осуществления настоящей технологии, правило выбора может быть основано на кинематических данных, определенных посредством процессора 110 с использованием системы 230 датчиков, для каждого из множества сторонних объектов (не проиллюстрированы), во время определения их присутствия.
[0106] В неограничивающих вариантах осуществления настоящей технологии, кинематические данные содержат, по меньшей мере, (1) значение координаты вдоль оси 332, x; (2) значение мгновенной скорости в полосе движения, v; и (3) значение мгновенного ускорения/замедления в полосе движения, a.
[0107] Таким образом, например, процессор 110 может определять то, что значение v мгновенной скорости стороннего объекта 302, во время определения его присутствия этого, составляет предварительно определенное пороговое значение скорости (например, 20 км/ч), превышающее ограничение скорости, предписанное для секции 340 дорожной карты. Соответственно, процессор 110 может быть выполнен с возможностью выбирать сторонний объект 302 из множества сторонних объектов (не проиллюстрированы), на основе его значения мгновенной скорости, для формирования траектории для транспортного средства 220.
[0108] В другом примере, допустим, что сторонний объект 302 перемещается перед транспортным средством 220 в той же полосе движения; и процессор 110 может определять, во время определения присутствия стороннего объекта 302, на основе его значения координаты x, то, что продольное расстояние между сторонним объектом 302 и транспортным средством 220 меньше предварительно определенного порогового значения расстояния (например, 3 метра). Соответственно, процессор 110 может быть выполнен с возможностью выбирать сторонний объект 302 из множества сторонних объектов (не проиллюстрированы), на основе продольного расстояния до транспортного средства 220, для формирования траектории для транспортного средства 220.
[0109] Другими словами, процессор 110 может быть выполнен с возможностью выбирать сторонний объект 302 из множества сторонних объектов (не проиллюстрированы), если водитель, ассоциированный со сторонним объектом 302, может квалифицироваться в качестве нарушителя правил дорожного движения на основе кинематических данных, ассоциированных со сторонним объектом 302.
[0110] В контексте настоящего раскрытия сущности, термин "нарушитель правил дорожного движения" означает водителя, поведение при вождении которого может квалифицироваться как непредсказуемое в силу подвергания транспортного средства 220 и других сторонних объектов из множества сторонних объектов (не проиллюстрированы), в секции 340 дорожной карты, риску столкновения между собой. Следует отметить, что также могут применяться другие правила выбора. Также следует отметить, что этап выбора может вообще опускаться, и процессор 110 может обрабатывать все из множества сторонних объектов (не проиллюстрированы).
[0111] Продолжая настоящий пример, после выбора стороннего объекта 302 для формирования траектории для транспортного средства 220, процессор 110 выполнен с возможностью формировать множество прогнозных траекторий для стороннего объекта 302, на основе текущих кинематических данных, ассоциированных с ним (таких как первые сторонние кинематические данные 309, проиллюстрированные в первом визуальном представлении 300), и дорожной картографической информации. С этой целью, на основе секции 340 дорожной карты, процессор 110 может формировать множество прогнозных траекторий, для стороннего объекта 302, содержащих первую траекторию, включающую в себя осуществление левого поворота 350 в предварительно определенном будущем местоположении стороннего объекта 302 (таком как вхождение 360 в левый поворот 350), и вторую траекторию, включающую в себя продолжение перемещения вперед, без осуществления левого поворота 350.
[0112] Дополнительно, в соответствии с неограничивающими вариантами осуществления настоящей технологии процессор 110 выполнен с возможностью определять, во множестве прогнозных траекторий, ассоциированных со сторонним объектом 302, маловероятные траектории, такие как траектории, которые сторонний объект 302 физически не должен иметь возможность выполнять.
[0113] В этом отношении, в неограничивающих вариантах осуществления настоящей технологии, чтобы определять маловероятные траектории во множестве прогнозных траекторий, процессор 110 выполнен с возможностью вычислять профили торможения для стороннего объекта 302 при его предварительно определенных значениях координат x, в так называемых привязочных точках, соответствующих различным моментам времени по мере того, как сторонний объект 302 перемещается в секции 340 дорожной карты. В некоторых неограничивающих вариантах осуществления, процессор 110 выполнен с возможностью вычислять профиль торможения для стороннего объекта 302 только в текущей привязочной точке.
[0114] В неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью формировать множество привязочных точек таким образом, что каждая привязочная точка должна быть отделена от другой на предварительно определенное расстояние (например, 10 или 20 метров). Следует четко понимать, что другие способы формирования множества привязочных точек не выходят за пределы объема настоящей технологии.
[0115] Таким образом, например, в первый момент t1 времени, соответствующий моменту определения присутствия стороннего объекта 302 в секции 340 дорожной карты, процессор 110 может быть выполнен с возможностью формировать первую привязочную точку 305. Дополнительно, на основе предварительно определенного расстояния между двумя последовательными привязочными точками, процессор 110 может быть выполнен с возможностью формировать множество привязочных точек, содержащих, помимо первой привязочной точки 305, вторую привязочную точку 315 и третью привязочную точку 325, каждая из которых ассоциирована, соответственно, с визуальными представлениями 300, 310 и 320 секции 340 дорожной карты.
[0116] Вообще говоря, данный профиль торможения, в данной одной из множества привязочных точек, указывает расстояние, необходимое для стороннего объекта 302, с учетом его кинематических данных, чтобы замедляться до максимального допустимого значения v скорости, позволяющему стороннему объекту 302 физически принимать соответствующую одну из множества прогнозных траекторий.
[0117] Следовательно, в неограничивающих вариантах осуществления настоящей технологии процессор 110 выполнен с возможностью определять, посредством системы 230 датчиков, в каждой из множества привязочных точек (либо, в некоторых альтернативных вариантах осуществления, для данной текущей привязочной точки), по мере того, как сторонний объект 302 перемещается в секции 340 дорожной карты, кинематические данные стороннего объекта, ассоциированные с ним.
[0118] Соответственно, первое визуальное представление 300 иллюстрирует первое состояние секции 340 дорожной карты в первый момент t1 времени, когда процессор 110 начинает отслеживание движение стороннего объекта 302. С этой целью, первое состояние секции 340 дорожной карты включает в себя первое состояние стороннего объекта 302, отличающееся посредством первых сторонних кинематических данных 309, {x1, v1}, где:
- x1 является значением координаты стороннего объекта 302, соответствующим первой привязочной точке 305;
- v1 является значением мгновенной скорости стороннего объекта 302 в первой привязочной точке 305.
[0119] Второе визуальное представление 310 иллюстрирует второе состояние секции 340 дорожной карты во второй момент t2 времени, когда сторонний объект проезжает мимо второй привязочной точки 315. С этой целью, второе состояние секции 340 дорожной карты включает в себя второе состояние стороннего объекта 302, отличающееся посредством вторых сторонних кинематических данных 319, {x2, v2}, где:
- x2 является значением координаты стороннего объекта 302, соответствующим второй привязочной точке 315;
- v2 является значением мгновенной скорости стороннего объекта 302 во второй привязочной точке 315.
[0120] В завершение, третье визуальное представление 320 иллюстрирует третье состояние секции 340 дорожной карты в третий момент t3 времени, когда сторонний объект проезжает мимо третьей привязочной точки 325. Третье состояние секции 340 дорожной карты включает в себя третье состояние стороннего объекта 302, отличающееся посредством третьих сторонних кинематических данных 329, {x3, v3}, где:
- x3 является значением координаты стороннего объекта 302, соответствующим третьей привязочной точке 325;
- v3 является значением мгновенной скорости стороннего объекта 302 в третьей привязочной точке 325.
[0121] Таким образом, например, процессор 110 выполнен с возможностью вычислять, в первой привязочной точке 305, первый профиль 306 торможения. Дополнительно, на основе индикатора вхождения 360 в левый поворот 350, процессор 110 выполнен с возможностью определять то, что для стороннего объекта 302 должно быть возможным допускать первую траекторию из множества прогнозных траекторий, поскольку для стороннего объекта 302 должно быть возможным, с учетом первых сторонних кинематических данных 309, замедляться до допустимого значения v скорости для выполнения левого поворота 350 перед вхождением 360 в него (что обеспечивает его физическую возможность). Соответственно, в первый момент t1 времени, процессор 110 не отфильтровывает первую траекторию в качестве маловероятной и поддерживает ее, во множестве прогнозных траекторий, ассоциированных со сторонним объектом 302, для дополнительного формирования траектории для транспортного средства 220.
[0122] За счет этого, в некотором смысле процессор 110 "анализирует" каждую из множества прогнозных траекторий, ассоциированных со сторонним объектом 302, на предмет осуществимости их выполнения посредством стороннего объекта 302, с учетом его кинематических данных, в соответствующей привязочной точке. Более конкретно, процессор 110 определяет осуществимость первой траектории, включающей в себя левый поворот 350, поскольку вторая траектория (перемещение вперед) может считаться осуществимой (и в силу этого вероятной), в описанных вариантах осуществления, с учетом любых кинематических данных стороннего объекта.
[0123] Соответственно, процессор 110 выполнен с возможностью формировать, последовательно, во второй привязочной точке 315 и третьей привязочной точке 325, второй профиль 316 торможения и третий профиль 326 торможения, соответственно. Дополнительно, в каждый из ассоциированных моментов t2 и t3 времени, процессор 110 выполнен с возможностью определять то, должна ли первая траектория, из множества прогнозных траекторий, ассоциированных со сторонним объектом 302, исключаться из дополнительного формирования траектории для транспортного средства 220. Далее описывается то, как процессор 110 вычисляет данный профиль торможения, со ссылкой на фиг. 4.
[0124] Со ссылкой на фиг. 4 схематично проиллюстрирован процесс 400 для вычисления, посредством процессора 110, профиля торможения для стороннего объекта 302, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
[0125] В процессе 400 процессор 110 выполнен с возможностью осуществлять доступ к кинематической модели 402. Вообще говоря, кинематическая модель 402 представляет комбинацию математических моделей, выполненных с возможностью вычислять данный профиль 410 торможения для стороннего объекта 302, приближающегося к данной одной из множества прогнозных траекторий, включающей в себя маневр. С этой целью, в неограничивающих вариантах осуществления настоящей технологии, кинематическая модель 402 может иметь доступ к следующим данным: (i) данные сторонние кинематические данные 404, причем данные сторонние кинематические данные 404 определяются посредством процессора 110 в данной привязочной точке; (ii) максимальная допустимая скорость 406 в предварительно определенном будущем местоположении перед маневром; и (iii) максимальная возможная скорость 408 стороннего объекта 302.
[0126] В некоторых неограничивающих вариантах осуществления настоящей технологии максимальная возможная скорость 408 может быть наибольшей из (a) значения скорости, которого сторонний объект 302 может физически достигать при перемещении из данной привязочной точки и последовательной привязочной точки, с учетом данных сторонних кинематических данных 404, и (b) значения ограничения максимальной скорости, предписанного для секции 340 дорожной карты. По меньшей мере, некоторые из этих неограничивающих вариантов осуществления обеспечивают возможность учета водителей, которые не соблюдают правила дорожного движения.
[0127] Кроме того, в неограничивающих вариантах осуществления настоящей технологии кинематическая модель 402 может быть дополнительно выполнена с возможностью определять, на основе данных, упомянутых выше, дополнительные сторонние кинематические данные 412, ассоциированные с данным профилем 410 торможения. В этих вариантах осуществления, дополнительные сторонние кинематические данные 412 указывают возможные отрицательные эффекты на одного из водителя, пассажиров и компонентов стороннего объекта 302, которые могут получаться в результате замедления стороннего объекта 302 согласно данному профилю 410 торможения.
[0128] Таким образом, в неограничивающих вариантах осуществления настоящей технологии дополнительные сторонние кинематические данные 412 содержат, по меньшей мере, одно из (1) значения максимального замедления в данном профиле 410 торможения, a; и (2) значения максимального рывка в данном профиле 410 торможения, j.
[0129] С дальнейшей ссылкой на фиг. 4 и возвращаясь к фиг. 3, для формирования профиля торможения в первой привязочной точке 305 (проиллюстрирована в первом визуальном представлении 300 секции 340 дорожной карты), посредством кинематической модели 402, процессор 110 выполнен с возможностью предоставлять в нее следующие данные: (i) первые сторонние кинематические данные 309, включающие в себя значение x1 координаты, соответствующее первой привязочной точке 305, и ассоциированное значение v1 мгновенной скорости, например, 70 км/ч; (ii) значение максимальной допустимой скорости 406, ассоциированное с левым поворотом 350, перед вхождением 360 в него, например, 40 км/ч.
[0130] В некоторых неограничивающих вариантах осуществления настоящей технологии кинематическая модель 402 может быть выполнена с возможностью вычислять данный профиль 410 торможения на основе наиболее резкого замедления стороннего объекта 302. Другими словами, кинематическая модель 402 может быть выполнена с возможностью вычислять данный профиль 410 торможения на основе значения максимального замедления, возможного для замедления хода стороннего объекта 302 до максимальной допустимой скорости 406 в предварительно определенном будущем местоположении перед маневром. Соответственно, данный профиль 410 торможения, в этом случае, может упоминаться как профиль наиболее резкого торможения.
[0131] Таким образом, продолжая пример относительно первого визуального представления 300, кинематическая модель 402, на основе наиболее резкого замедления, может быть выполнена с возможностью вычислять первый профиль 306 торможения и соответствующие значения дополнительных сторонних кинематических данных 412, ассоциированных с ним. Соответственно, первый профиль 306 торможения представляет собой профиль наиболее резкого торможения с учетом первых сторонних кинематических данных 309. Из первого визуального представления 300 можно принимать во внимание, что расстояние первого профиля 306 торможения заканчивается до вхождения 360 в левый поворот 350. Следовательно, процессор 110 затем может быть выполнен с возможностью определять то, что первая траектория из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, должна быть вероятной, поскольку сторонний объект 302, на основе первого профиля 306 торможения, должен иметь возможность замедлять ход с 70 км/ч до 40 км/ч перед вхождением 360 в левый поворот 350. Процессор 110 в силу этого должен поддерживать первую траекторию, ассоциированную со сторонним объектом 302, для дополнительного формирования траектории для транспортного средства 220.
[0132] Тем не менее, в другом примере, даже если процессор 110 может определять, исключительно на основе расстояния первого профиля 306 торможения, то, что первая траектория, ассоциированная со сторонним объектом 302, должна быть вероятной, процессор 110 может отклонять ее на основе ассоциированных значений дополнительных сторонних кинематических данных 412. Например, процессор 110 может определять то, что ассоциированное значение максимального замедления в первом профиле 306 торможения выше предварительно определенного порогового значения ускорения (например, ±3 м/с2). Альтернативно, процессор 110 может определять то, что ассоциированное значение максимального рывка, j, в первом профиле 306 торможения выше предварительно определенного порогового значения рывка. Таким образом, процессор может быть выполнен с возможностью исключать первую траекторию из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, для дополнительного формирования траектории для транспортного средства 220.
[0133] В других неограничивающих вариантах осуществления настоящей технологии кинематическая модель 402 может быть выполнена с возможностью формировать данный профиль 410 торможения таким образом, что ассоциированные значения дополнительных сторонних кинематических данных 412 не выше соответствующих предварительно определенных значений. Например, кинематическая модель 402 может быть выполнена с возможностью вычислять данный профиль 410 торможения с минимальным значением замедления, необходимым для замедления хода стороннего объекта 302 до максимальной допустимой скорости 406. В другом примере, кинематическая модель 402 может быть выполнена с возможностью вычислять данный профиль 410 торможения со значением среднего замедления, т.е. значением в диапазоне, заданном посредством минимального значения замедления и значения максимального замедления, при котором сторонний объект 302 дополнительно может замедлять ход до максимальной допустимой скорости 406. Следовательно, данный профиль 410 торможения может упоминаться как профиль минимально-резкого торможения и профиль средне-резкого торможения, соответственно.
[0134] Возвращаясь к первому визуальному представлению 300, процессор 110 может быть выполнен с возможностью, с использованием кинематической модели 402, на основе первых сторонних кинематических данных 309, вычислять профиль 307 средне-резкого торможения и профиль 308 минимально-резкого торможения. Можно принимать во внимание, что для первого визуального представления 300, согласно любому из профиля 307 средне-резкого торможения и профиля 308 минимально-резкого торможения, сторонний объект 302 не должен иметь возможность замедлять ход с 70 км/ч до 40 км/ч перед вхождением 360 в левый поворот 350. Следовательно, процессор 110, на основе либо профиля 307 средне-резкого торможения, либо профиля 308 минимально-резкого торможения, может быть выполнен с возможностью исключать первую траекторию из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, для дополнительного формирования траектории для транспортного средства 220.
[0135] Как упомянуто выше, в каждой последовательной привязочной точке, процессор 110 выполнен с возможностью вычислять, посредством кинематической модели 402, соответствующий профиль торможения. Таким образом, во второй привязочной точке 315, процессор 110 выполнен с возможностью вычислять второй профиль 316 торможения на основе вторых сторонних кинематических данных 319, как проиллюстрировано посредством второго визуального представления 310. Соответственно, на основе второго профиля 316 торможения, процессор 110 должен быть выполнен с возможностью исключать первую траекторию в качестве маловероятной, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, для дополнительного формирования траектории для транспортного средства 220.
[0136] В завершение, согласно неограничивающим вариантам осуществления настоящей технологии, на основе исключения маловероятной траектории из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, процессор 110 может быть выполнен с возможностью формировать траекторию для транспортного средства 220. Например, при определении того, что маловероятно, что сторонний объект 302 должен осуществлять левый поворот 350, и по сути, сторонний объект 302 не должен замедлять ход для этого, процессор 110 может инструктировать транспортному средству 220 сменять полосу движения (например, для выполнения левого поворота 350 в будущий момент времени), как можно принимать во внимание посредством третьего визуального представления 320.
[0137] Из третьего визуального представления 320 дополнительно можно принимать во внимание, что хотя процессор 110 уже исключает первую траекторию из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, процессор 110 может быть выполнен с возможностью вычислять, посредством кинематической модели 402, в третьей привязочной точке 325, третий профиль 326 торможения на основе третьих сторонних кинематических данных 329. Согласно неограничивающим вариантам осуществления настоящей технологии, процессор 110 может быть выполнен с возможностью вычислять третий профиль 326 торможения для стороннего объекта 302, например, относительно другой прогнозной траектории, включающей в себя другой маневр, который выходит за пределы секции 340 дорожной карты.
[0138] Следует четко понимать, что в зависимости от конкретной секции дорожной карты, множество предсказанных траекторий, ассоциированных со сторонним объектом 302, могут содержать более одной траектории, которая включает в себя маневр. Таким образом, в неограничивающих вариантах осуществления настоящей технологии, для того чтобы формировать траекторию для транспортного средства 220, процессор 110 может быть выполнен с возможностью определять осуществимость каждой такой траектории, включающей в себя маневр, как описано выше со ссылкой на фиг. 3 и 4.
[0139] С учетом архитектуры и примеров, предоставленных выше, теперь можно осуществлять способ для формирования траектории для SDC (например, для транспортного средства 220). Со ссылкой теперь на фиг. 5, проиллюстрирована блок-схема последовательности операций способа 500, согласно неограничивающим вариантам осуществления настоящей технологии. Способ 500 осуществляется посредством процессора 110. Процессор 110, например, может представлять собой часть электронного устройства 210.
Этап 502 - определение, посредством электронного устройства, присутствия по меньшей мере одного стороннего объекта вокруг SDC
[0140] На этапе 502 процессор 110 выполнен с возможностью, посредством одного или более датчиков, ассоциированных с транспортным средством 220 (к примеру, посредством системы 230 датчиков), определять присутствие, по меньшей мере, одного стороннего объекта (такого как сторонний объект 302, проиллюстрированный на фиг. 3), движущегося в данной секции дорожной карты (такой как секция 340 дорожной карты), например, в соседней полосе движения, относительно к полосы движения, по которой движется транспортное средство 220.
[0141] В неограничивающих вариантах осуществления настоящей технологии сторонний объект 302 содержит динамический сторонний объект, включающий в себя другое транспортное средство (такое как автомобиль, грузовик и т.п.), велосипедиста, заблудившееся животное и т.д.
[0142] В неограничивающих вариантах осуществления настоящей технологии сторонний объект 302 представляет собой один из множества сторонних объектов (не проиллюстрированы), присутствующих в секции 340 дорожной карты. Таким образом, в некоторых неограничивающих вариантах осуществления настоящей технологии, процессор 110 может быть выполнен с возможностью обрабатывать каждый из множества сторонних объектов (не проиллюстрированы), присутствующих в секции 340 дорожной карты. В других неограничивающих вариантах осуществления настоящей технологии, процессор 110 может быть выполнен с возможностью выбирать, для множества сторонних объектов (не проиллюстрированы), только сторонний объект 302.
[0143] В неограничивающих вариантах осуществления настоящей технологии процессор 110 выполнен с возможностью выбирать сторонний объект 302 посредством применения правила выбора на основе сторонних кинематических данных, захваченных посредством системы 230 датчиков.
[0144] В неограничивающих вариантах осуществления настоящей технологии кинематические данные содержат, по меньшей мере, (1) значение координаты вдоль оси 332, x; (2) значение мгновенной скорости в полосе движения, v; и (3) значение мгновенного ускорения/замедления в полосе движения, a.
[0145] В некоторых неограничивающих вариантах осуществления настоящей технологии правило выбора может указывать водителя, ассоциированного со сторонним объектом 302, представляющего собой нарушителя правил дорожного движения.
[0146] Соответственно, в неограничивающих вариантах осуществления настоящей технологии процессор 110, во время определения присутствия стороннего объекта 302 и его выбора, выполнен с возможностью определять кинематические данные, ассоциированные со сторонним объектом 302 (такие как первые сторонние кинематические данные 309, проиллюстрированные в первом визуальном представлении 300). Таким образом, например, процессор 110 может быть выполнен с возможностью определять то, что при значении x1 координаты, соответствующем первому моменту t1 времени, сторонний объект 302 перемещается, в секции 340 дорожной карты, при значении v1 мгновенной скорости.
Этап 504 - формирование, посредством электронного устройства, множества предсказанных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта, причем по меньшей мере одна из множества траекторий включает в себя маневр, выполнимый, посредством стороннего объекта, в будущем местоположении стороннего объекта в качестве части выполнения, по меньшей мере, одной из множества траекторий
[0147] На этапе 504, процессор 110 выполнен с возможностью определять, на основе первых сторонних кинематических данных 309 и дорожной картографической информации, множество предсказанных траекторий, ассоциированных со сторонним объектом 302, при этом, по меньшей мере, одна траектория включает в себя маневр, который сторонний объект 302 может выполнять в своем будущем местоположении. Например, как описано выше со ссылкой на фиг. 3, процессор 110 может определять множество предсказанных траекторий, содержащих (1) первую траекторию, включающую в себя выполнение левого поворота 350 при вхождении 360 в него; и (2) вторую траекторию, включающую в себя продолжение движения вперед без выполнения левого поворота 350.
Этап 506 - вычисление по меньшей мере для одной из множества траекторий, включающей в себя маневр, выполнимый в будущем местоположении стороннего объекта, соответствующего профиля торможения, ассоциированного со сторонним объектом
[0148] На этапе 506, процессор 110 выполнен с возможностью вычислять данный профиль торможения для соответствующей одной, включающей в себя маневр, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302.
[0149] С этой целью, согласно неограничивающим вариантам осуществления настоящей технологии, процессор 110 сначала выполнен с возможностью формировать множество привязочных точек, ассоциированных со сторонним объектом 302, как описано выше со ссылкой на фиг. 3. Дополнительно, процессор 110 выполнен с возможностью последовательно, в каждой из множества привязочных точек, вычислять соответствующий профиль торможения.
[0150] В неограничивающих вариантах осуществления настоящей технологии данный профиль торможения, вычисленный в данной привязочной точке, для соответствующей траектории, включающей в себя маневр, указывает расстояние, которое должно требоваться стороннему объекту 302 для того, чтобы замедлять ход до допустимого значения скорости для выполнения маневра.
[0151] Например, как описано выше со ссылкой на фиг. 3, процессор 110 может быть выполнен с возможностью вычислять, в первой привязочной точке 305, этот первый профиль 306 торможения на основе первых сторонних кинематических данных 309. Дополнительно, в качестве перемещений стороннего объекта 302 в секции 340 дорожной карты, процессор 110 может быть выполнен с возможностью вычислять второй профиль 316 торможения во второй привязочной точке 315; и третий профиль 326 торможения в третьей привязочной точке 325.
Этап 508 - в ответ на то, что соответствующий профиль торможения составляет выше предварительно определенного порогового значения, исключение ассоциированной одной из по меньшей мере одной из множества траекторий из будущей обработки.
[0152] На этапе 508, процессор 110, на основе данного профиля торможения и ассоциированного предварительно определенного порогового значения, выполнен с возможностью либо исключать соответствующую одну, включающую в себя маневр, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, либо допускать ее и поддерживать ее для дополнительного формирования траектории для транспортного средства 220.
[0153] В неограничивающих вариантах осуществления настоящей технологии превышение ассоциированного предварительно определенного порогового значения указывает маловероятность соответствующей одной, включающей в себя маневр, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302.
[0154] В некоторых неограничивающих вариантах осуществления настоящей технологии предварительно определенное пороговое значение ассоциировано с будущим местоположением стороннего объекта 302, перед которым сторонний объект 302 может физически выполнять маневр, если он имеет возможность замедляться до допустимого значения скорости, ассоциированного с маневром.
[0155] В связи с этим, например, процессор 110 может быть выполнен с возможностью определять то, что первый профиль 306 торможения, на основе расстояния, ассоциированного с ним, заканчивается до вхождения 360 в левый поворот 350, что должно означать то, что сторонний объект 302 должен иметь возможность замедляться до допустимого значения v скорости, ассоциированного с левым поворотом 350, чтобы входить в левый поворот 350, перед вхождением 360 в него. Соответственно, в первый момент t1 времени, процессор 110, на основе расстояния, ассоциированного с первым профилем 306 торможения, должен допускать первую траекторию для стороннего объекта 302 и должен поддерживать ее для дополнительного формирования траектории для транспортного средства 220.
[0156] В отличие от этого, процессор 110 может быть выполнен с возможностью определять то, что второй профиль 316 торможения не заканчивается до вхождения 360 в левый поворот 350, что должно означать то, что во второй момент t2 времени сторонний объект 302 не должен иметь возможность замедляться до допустимого значения v скорости, ассоциированного с левым поворотом 350, перед вхождением 360 в него. Соответственно, во второй момент t2 времени, процессор 110, на основе расстояния, ассоциированного со вторым профилем 316 торможения, должен исключать первую траекторию из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, для дополнительного формирования траектории для транспортного средства 220.
[0157] В других неограничивающих вариантах осуществления настоящей технологии чтобы вычислять данный профиль (такой как данный профиль 410 торможения) и определять предварительно определенное пороговое значение для этого, процессор 110 может быть выполнен с возможностью осуществлять доступ к кинематической модели, такой как кинематическая модель 402, проиллюстрированная на фиг. 4.
[0158] В неограничивающих вариантах осуществления настоящей технологии кинематическая модель может быть выполнена с возможностью вычислять данный профиль 410 торможения на основе следующих данных: (i) данные сторонние кинематические данные 404, причем данные сторонние кинематические данные 404 определяются посредством процессора 110 в данной привязочной точке; (ii) максимальная допустимая скорость 406 в предварительно определенном будущем местоположении перед маневром; и (iii) максимальная возможная скорость 408 стороннего объекта 302.
[0159] В некоторых неограничивающих вариантах осуществления настоящей технологии кинематическая модель 402 может быть дополнительно выполнена с возможностью определять, на основе данных, упомянутых выше, дополнительные сторонние кинематические данные 412, ассоциированные с данным профилем 410 торможения. Дополнительные сторонние кинематические данные 412 содержат, по меньшей мере, одно из (1) значения максимального замедления в данном профиле 410 торможения, a; и (2) значения максимального рывка в данном профиле 410 торможения, j.
[0160] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110, имеющий доступ к кинематической модели 402, может быть выполнен с возможностью формировать данный профиль 410 торможения на основе наиболее резкого замедления стороннего объекта 302, возможного для выполнения маневра в будущем местоположении. Например, за счет этого процессор 110 может быть выполнен с возможностью формировать первый профиль 306 торможения на основе наиболее резкого замедления, как пояснено выше в отношении первого профиля 306 торможения со ссылкой на фиг. 3 и 4.
[0161] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью исключать соответствующую одну, включающую в себя маневр, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, в качестве маловероятной на основе предварительно определенного порогового значения ускорения (например, ±3 м/с2), как описано выше в отношении первого профиля 306 торможения со ссылкой на фиг. 3 и 4.
[0162] В других неограничивающих вариантах осуществления настоящей технологии процессор 110 может быть выполнен с возможностью исключать соответствующую одну, включающую в себя маневр, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, в качестве маловероятной на основе предварительно определенного порогового значения рывка, как описано выше в отношении первого профиля 306 торможения со ссылкой на фиг. 3 и 4.
[0163] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110, имеющий доступ к кинематической модели 402, может быть выполнен с возможностью формировать средне-резкий профиль и минимально-резкий профиль, к примеру, средне-резкий профиль 307 и минимально-резкий профиль 308.
Этап 510 - определение, посредством электронного устройства, траектории SDC на основе оставшихся из множества предсказанных траекторий для третьей стороны
[0164] На этапе 510, после исключения соответствующей одной, включающей в себя маневр, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302, процессор 100 выполнен с возможностью формировать траекторию для транспортного средства 220 на основе оставшихся из множества предсказанных траекторий, ассоциированных со сторонним объектом 302.
[0165] В неограничивающих вариантах осуществления настоящей технологии при формировании траектории для транспортного средства 220, процессор 110 может быть выполнен с возможностью инструктировать транспортному средству 220 замедляться или в противном случае активно ускоряться, выполнять маневр (например, смену полосы движения) и т.п., чтобы исключать или снижать риск столкновения с любыми сторонними объектами в данной секции дорожной карты.
[0166] Например, как описано выше в отношении второго визуального представления 310 и третьего визуального представления 320 секции 340 дорожной карты, процессор 110 исключает, во второй привязочной точке 315, первую траекторию, включающую в себя выполнение левого поворота 350, из множества предсказанных траекторий, ассоциированных со сторонним объектом 302. За счет этого, процессор 110 определяет то, что сторонний объект 302 с большей вероятностью должен продолжать движение вперед (принимать вторую из множества ассоциированных траекторий); и в силу этого процессор 110 может быть выполнен с возможностью инструктировать транспортному средству 220 выполнять смену полосы движения (например, выполнять левый поворот 350 в будущий момент времени), обеспечивающую более низкие риски столкновения между транспортным средством 220 и другими сторонними объектами, движущимися в секции 340 дорожной карты.
[0167] Модификации и улучшения вышеописанных реализаций настоящей технологии могут становиться очевидными для специалистов в данной области техники. Вышеприведенное описание должно быть примерным, а не ограничивающим. В силу этого, объем настоящей технологии имеет намерение быть ограниченным исключительно посредством объема прилагаемой формулы изобретения.
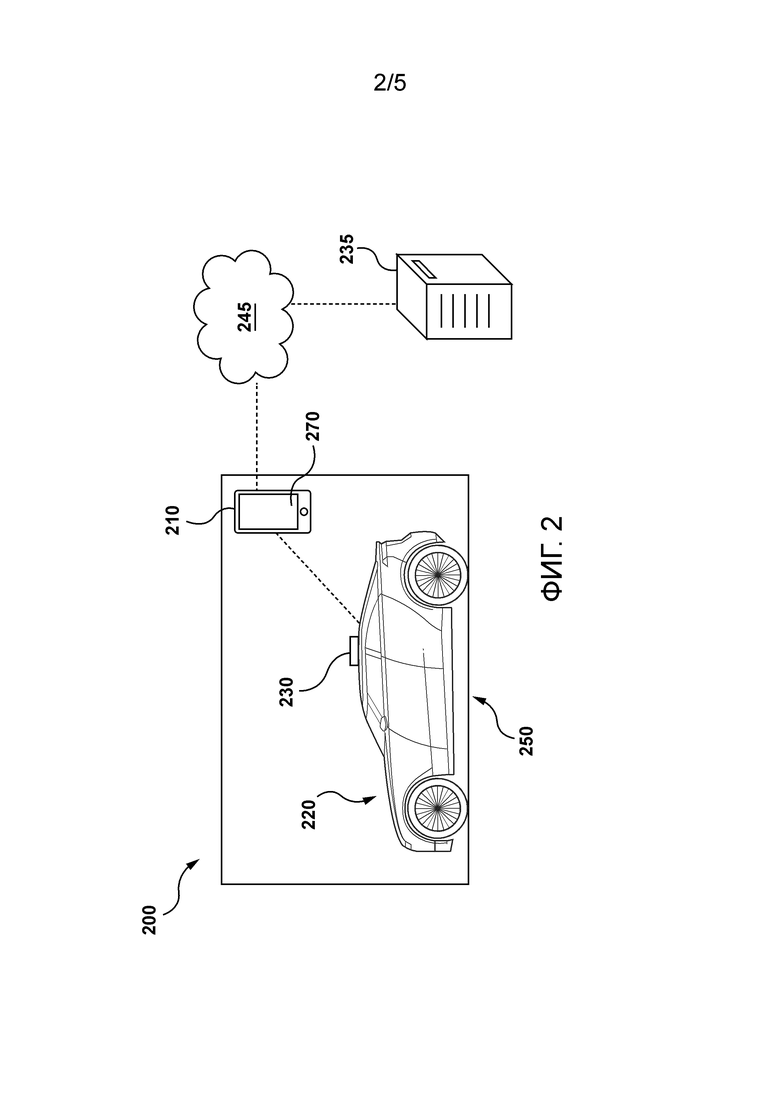
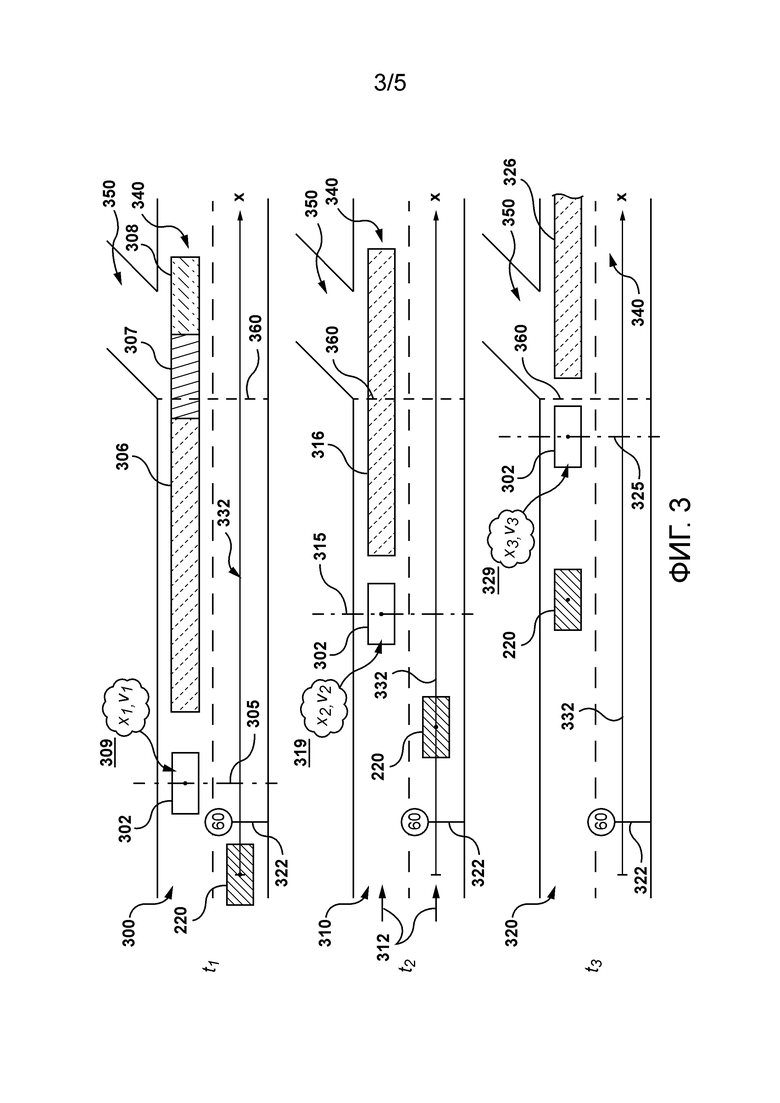
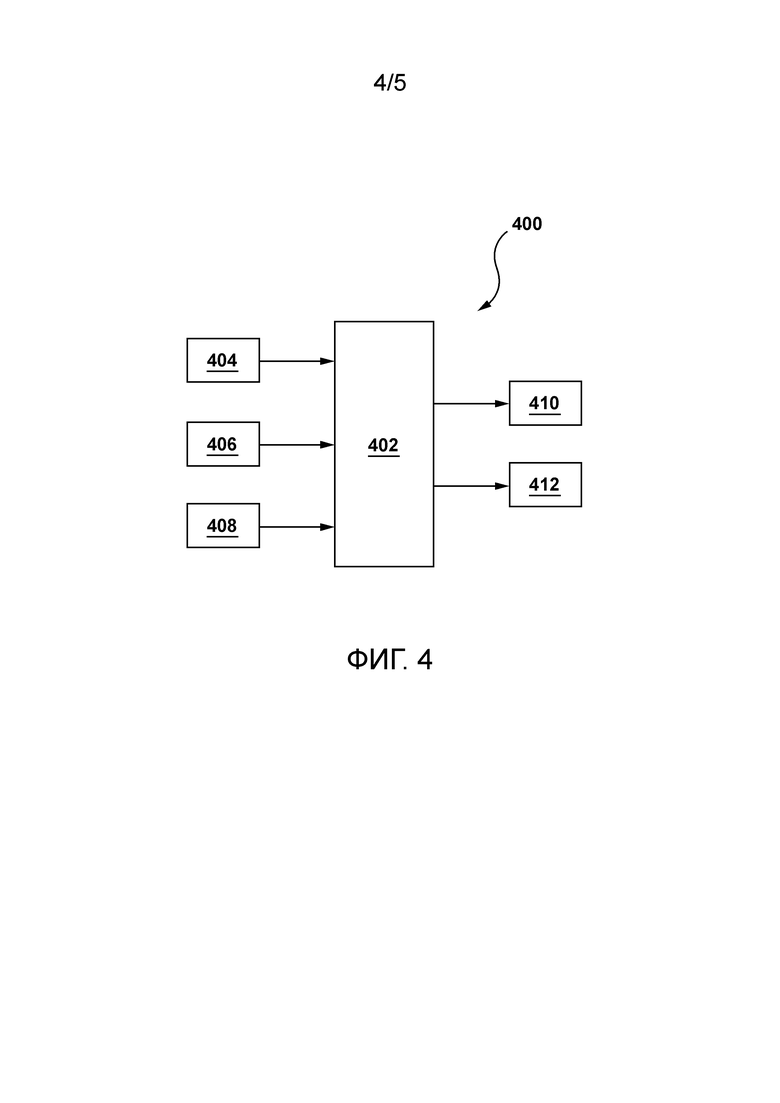
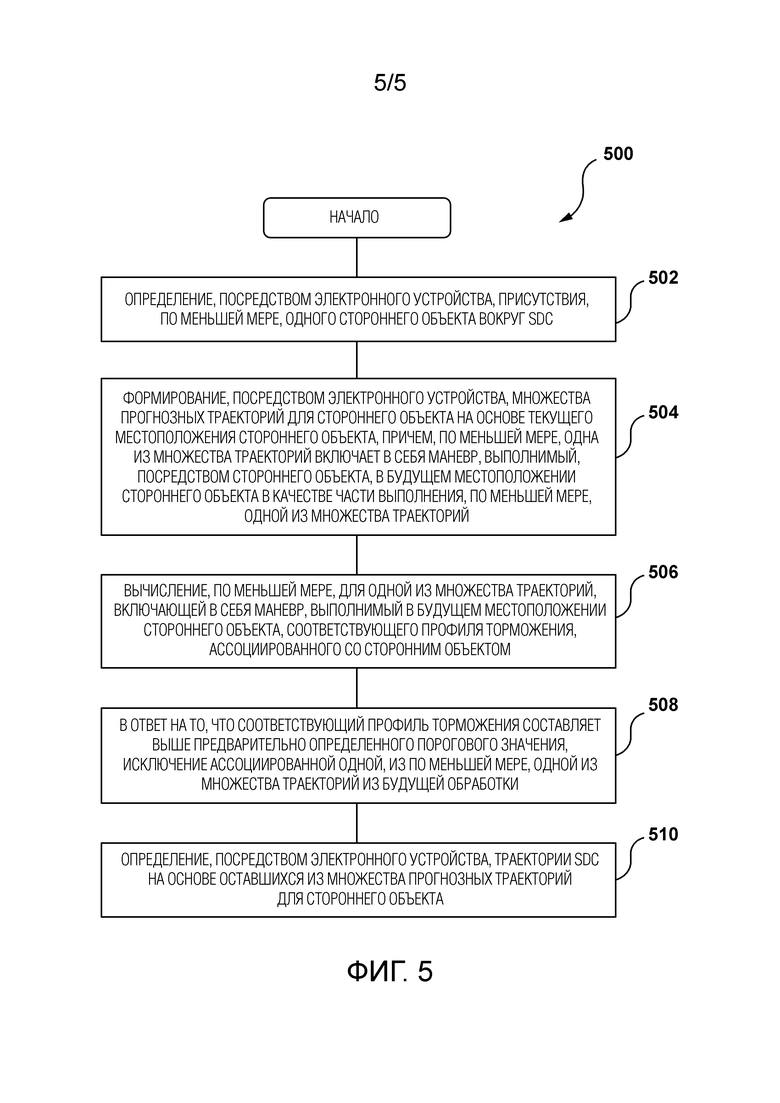
Изобретение относится к способу и системе формирования траектории для беспилотного автомобиля (SDC). Способ формирования траектории для беспилотного автомобиля, причем SDC ассоциирован с электронным устройством. Способ выполняют посредством электронного устройства, при этом способ содержит этапы, на которых определяют, посредством электронного устройства, присутствие по меньшей мере одного стороннего объекта вокруг SDC, определяют, посредством электронного устройства, текущее местоположение стороннего объекта, формируют, посредством электронного устройства, множество предсказанных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта, причем по меньшей мере одна из множества траекторий включает в себя маневр, выполнимый, посредством стороннего объекта, в будущем местоположении стороннего объекта в качестве части выполнения по меньшей мере одной из множества траекторий, вычисляют по меньшей мере для одной из множества траекторий, включающей в себя маневр, выполнимый в будущем местоположении стороннего объекта, соответствующий профиль торможения, ассоциированный со сторонним объектом. Профиль торможения указывает маневр для регулирования скорости стороннего объекта, чтобы обеспечивать возможность стороннему объекту выполнять маневр в будущем местоположении стороннего объекта, в ответ на то, что соответствующий профиль торможения составляет выше предварительно определенного порогового значения, исключают ассоциированную одну из по меньшей мере одной из множества траекторий из будущей обработки, определяют, посредством электронного устройства, траекторию SDC на основе оставшихся из множества предсказанных траекторий для стороннего объекта. Достигается повышение удобства использования автономного транспортного средства. 2 н. и 16 з.п. ф-лы, 5 ил.
1. Способ формирования траектории для беспилотного автомобиля (SDC), причем SDC ассоциирован с электронным устройством, причем способ выполняют посредством электронного устройства, при этом способ содержит этапы, на которых:
- определяют, посредством электронного устройства, присутствие по меньшей мере одного стороннего объекта вокруг SDC;
- определяют, посредством электронного устройства, текущее местоположение стороннего объекта;
- формируют, посредством электронного устройства, множество предсказанных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта, причем по меньшей мере одна из множества траекторий включает в себя маневр, выполнимый, посредством стороннего объекта, в будущем местоположении стороннего объекта в качестве части выполнения по меньшей мере одной из множества траекторий;
- вычисляют по меньшей мере для одной из множества траекторий, включающей в себя маневр, выполнимый в будущем местоположении стороннего объекта, соответствующий профиль торможения, ассоциированный со сторонним объектом,
причем профиль торможения указывает маневр для регулирования скорости стороннего объекта, чтобы обеспечивать возможность стороннему объекту выполнять маневр в будущем местоположении стороннего объекта;
- в ответ на то, что соответствующий профиль торможения составляет выше предварительно определенного порогового значения, исключают ассоциированную одну из по меньшей мере одной из множества траекторий из будущей обработки;
- определяют, посредством электронного устройства, траекторию SDC на основе оставшихся из множества предсказанных траекторий для стороннего объекта.
2. Способ по п. 1, в котором сторонний объект представляет собой один из множества сторонних объектов, расположенных вокруг SDC.
3. Способ по п. 2, при этом способ выполняют для каждого из множества сторонних объектов.
4. Способ по п. 2, при этом способ дополнительно содержит этапы, на которых выбирают сторонний объект из множества сторонних объектов и осуществляют способ только для упомянутого стороннего объекта.
5. Способ по п. 4, в котором выбор стороннего объекта из множества сторонних объектов содержит этап, на котором применяют правило выбора.
6. Способ по п. 5, в котором правило выбора указывает водителя, ассоциированного со сторонним объектом, с большой вероятностью представляющего собой нарушителя правил дорожного движения.
7. Способ по п. 1, в котором предварительно определенное пороговое значение указывает маловероятность маневра, выполняемого в будущем местоположении стороннего объекта.
8. Способ по п. 7, в котором маловероятность маневра, выполняемого в будущем местоположении стороннего объекта, указывает физическую невозможность маневра с учетом профиля торможения.
9. Способ по п. 1, в котором предварительно определенное пороговое значение определяется с использованием кинематической модели.
10. Способ по п. 9, в котором кинематическая модель основана на профиле наиболее резкого торможения.
11. Способ по п. 9, в котором кинематическая модель основана по меньшей мере на одном из следующего: профиль минимального торможения, профиль среднего торможения и профиль наиболее резкого торможения.
12. Способ по п. 9, в котором предварительно определенное пороговое значение дополнительно основано на модели рывка.
13. Способ по п. 1, в котором предварительно определенное пороговое значение составляет +/-3 м/с2.
14. Способ по п. 1, в котором сторонний объект представляет собой динамический сторонний объект.
15. Способ по п. 1, в котором множество предсказанных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта представляют собой множество маневров посредством стороннего объекта, при этом:
- данный один из множества маневров является выполнимым в соответствующем одном из будущих местоположений стороннего объекта, и при этом способ является выполнимым для каждого из будущих местоположений стороннего объекта.
16. Электронное устройство, содержащее:
- процессор;
- интерфейс связи для обмена данными с датчиком, смонтированным на беспилотном автомобиле (SDC);
причем процессор выполнен с возможностью:
- определять, посредством электронного устройства, присутствие по меньшей мере одного стороннего объекта вокруг SDC;
- определять текущее местоположение стороннего объекта;
- формировать множество прогнозных траекторий для стороннего объекта на основе текущего местоположения стороннего объекта, причем по меньшей мере одна из множества траекторий включает в себя маневр, выполнимый, посредством стороннего объекта, в будущем местоположении стороннего объекта в качестве части выполнения по меньшей мере одной из множества траекторий;
- вычислять по меньшей мере для одной из множества траекторий, включающей в себя маневр, выполнимый в будущем местоположении стороннего объекта, соответствующий профиль торможения, ассоциированный со сторонним объектом,
причем профиль торможения указывает маневр для регулирования скорости стороннего объекта, чтобы обеспечивать возможность стороннему объекту выполнять маневр в будущем местоположении стороннего объекта;
- в ответ на то, что соответствующий профиль торможения составляет выше предварительно определенного порогового значения, исключать ассоциированную одну из по меньшей мере одной из множества траекторий из будущей обработки;
- определять траекторию SDC на основе оставшихся из множества прогнозных траекторий для стороннего объекта.
17. Электронное устройство по п. 16, в котором процессор дополнительно выполнен с возможностью выбирать сторонний объект из множества сторонних объектов на основе правила выбора.
18. Электронное устройство по п. 16, в котором процессор, чтобы определять предварительно определенное пороговое значение, дополнительно выполнен с возможностью доступа к кинематической модели.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2631543C1 |

