Для автоматизированного управления технологическими процессами и установками в предшествующем уровне техники используются так называемые системы диспетчерского управления и сбора данных (SCADA). Под этим понимаются системы управления, которые обеспечивают возможность контроля, управления и визуализации промышленных процессов. Компоненты этих систем управления представляют собой, с одной стороны, аппаратные компоненты, такие как датчики, PLC или RTU для измерения и передачи значений процесса, а с другой стороны - программное обеспечение, например SIMATIC WinCC OA в качестве пользовательского интерфейса, управления предупредительной сигнализацией, архивирования данных и визуализации процесса.
Важный случай применения систем SCADA относится к контролю и управлению инфраструктурами снабжения, такими как нефте- или газопроводы, которые обычно простираются на большие географические области и состоят из различных компонентов оборудования. Их надежная и безаварийная работа важна не только с коммерческой точки зрения для оператора и обслуживаемого населения, но и должна быть гарантирована ввиду нормативных требований в качестве эксплуатационной предпосылки в любой момент времени.
В то время как оператор оборудования в системе SCADA контролирует посредством стационарных датчиков в различных точках контроля типовые параметры, такие как фактическое давление, расход или температура транспортируемой в трубопроводе среды, он не имеет никакой возможности получать более сложные и неструктурированные данные из той же системы. К этому относятся информации и сведения, которые являются результатом съемки датчиков формирования изображения (например, цветной камеры, NIR-камеры, LiDAR) оборудования снабжения.
Таким образом, в основе изобретения лежит задача дальнейшего развития предшествующего уровня техники и, в частности, привлечения данных изображения для управления процессом.
В соответствии с изобретением это достигается с помощью способа для визуализации и валидации событий процесса в системах контроля процесса, при котором стационарно установленная система датчиков сообщает состояния в систему контроля процесса, при превышении заранее заданных предельных значений системой контроля процесса запускается, планируется и выполняется локальный сбор данных с помощью мобильного датчика, и результат этого сбора данных в системе контроля процесса анализируется, визуализируется и интегрируется в информацию состояния о процессе или оборудовании.
Предпочтительные варианты осуществления следуют из зависимых пунктов формулы изобретения.
Установленные на воздушных платформах (таких, как беспилотные летательные аппараты (дроны), вертолеты, самолеты) мобильные датчики могут предоставлять данные изображения с геопривязкой, которые могут анализироваться с помощью алгоритмов на основе компьютерного зрения.
В соответствии с изобретением, также эти источники данных привлекаются для описания и оцифровки состояния процесса. В частности, сочетание доступных численных значений процесса в системе SCADA с полученными из данных изображения информациями может обеспечить оператору дополнительные ценные сведения.
Предпочтительными применениями при контроле надземных или подземных трубопроводов, являются, в частности, распознавание снижения насыпи трубопровода ниже заданного значения, обнаружение изменений местности с течением времени и оценка повреждений трубопровода вследствие строительных работ, вандализма, а также из-за механического износа.
За счет использования мобильного датчика изображения в сочетании с алгоритмами на основе компьютерного зрения, затраты ручного труда могут быть сведены к минимуму, и могут генерироваться воспроизводимые результаты, а также могут обрабатываться крупномасштабные области и получаемые в результате большие объемы данных.
Изобретение описывается более подробно со ссылкой на чертежи, на которых в качестве примера показано следующее:
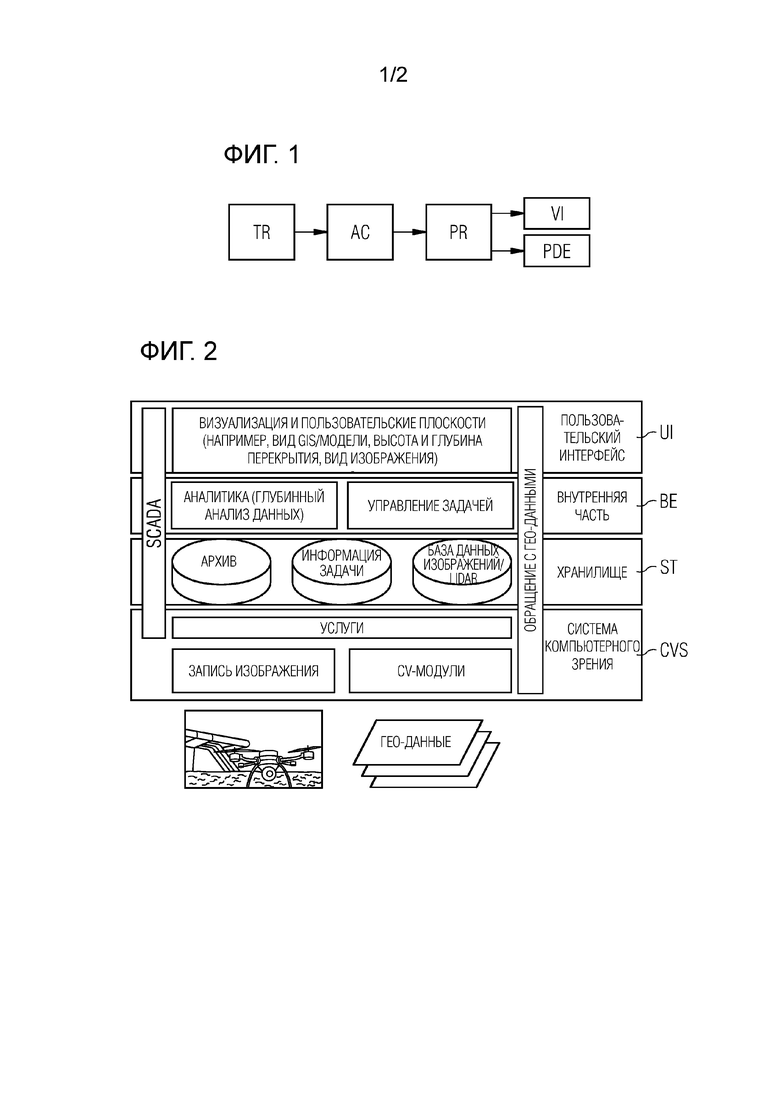
Фиг. 1 - схематичное представление последовательности соответствующего изобретению способа.
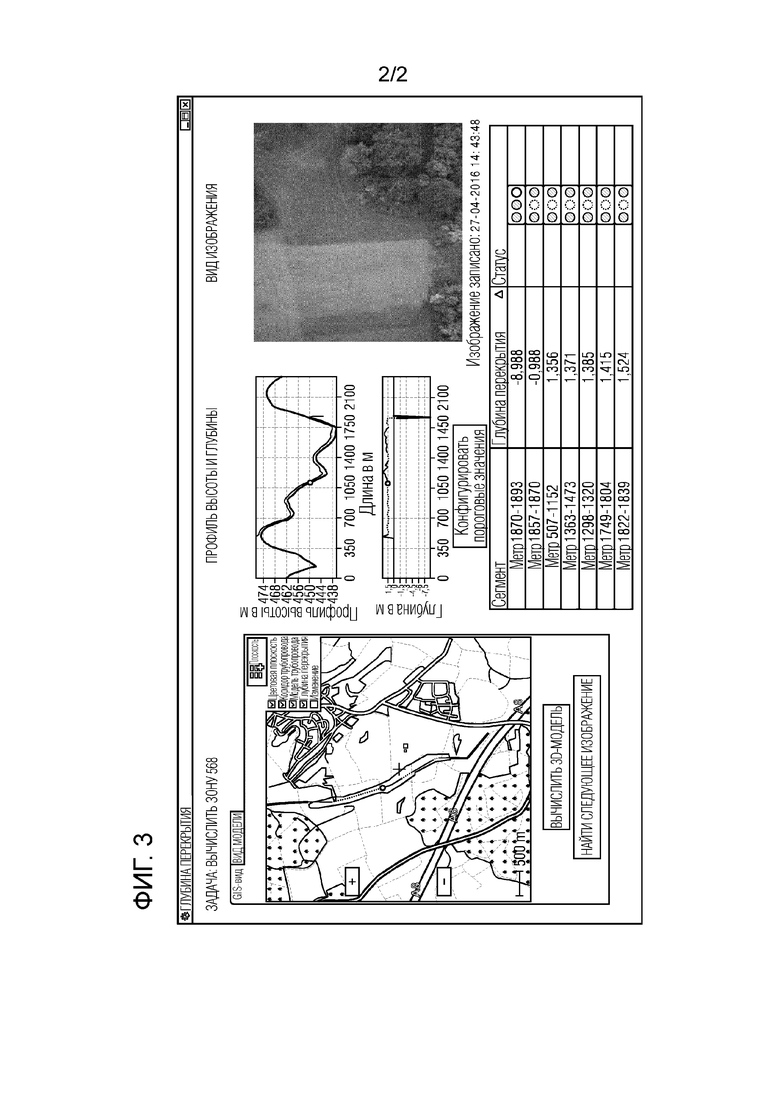
Фиг. 2 - архитектура соответствующей изобретению системы SCADA
Фиг. 3 - интегрированный в программное обеспечение SCADA WinCC OA пользовательский интерфейса UI.
Соответствующая изобретению система управления и контроля согласно фиг. 1 основана на обычной системе диспетчерского управления и сбора данных (SCADA), как она, например, вводится в коммерческий оборот компанией Siemens AG под названием WinCC OA (Windows Control Center Open Architecture - открытая архитектура центра управления Windows).
Критические значения процесса и неисправности контролируемого оборудования регистрируются с помощью датчиков и представляются в виде сигналов тревоги и/или сообщений в системе SCADA.
Если эти критические значения процесса и неисправности не может быть устранены путем управляющих вмешательств, то требуется ручное управление и визуальный осмотр техническим персоналом.
Для проведения проверок и технического обслуживания имеются вспомогательные программные средства, такие как AMS (Advanced Maintenance Suite - расширенный набор программ по техническому обслуживанию) для WinCC OA.
Они служат управлению техническим персоналом, но не позволяют осуществлять автоматизированный и управляемый событиям захват изображения, например, путем облета (аэрофотосъемки) крупных инфраструктурных систем с помощью дронов.
Возвращение результатов из анализа изображений в систему SCADA не предусмотрено в известном уровне техники. Однако ручная инспекция без оцифровки наблюдений не обеспечивает воспроизводимых результатов, и, следовательно, непригодна для таких применений, как обнаружение изменения, для которых предпосылкой является структурированный и сопоставимый процесс.
В WinCC OA содержатся функции управления видео, поэтому стационарные видео аппаратные средства могут быть интегрированы в систему SCADA. Тем самым обеспечивается возможность контроля оборудования, например, туннельных систем или транспортных сооружений пользователями SCADA и гарантируется раннее выявление проблемных ситуаций.
Однако стационарные камеры не могут использоваться для крупномасштабных инфраструктур снабжения, таких как трубопроводы или электрические линии, которые могут простираться на несколько тысяч км и требуют данных изображения с высоким разрешением с географической привязкой для обнаружения неисправностей.
Для проверки крупномасштабного оборудования снабжения, такого как нефте- или газопроводы, известно, что, с регулярными интервалами, выполняются облеты, например, на вертолете. При этом обращается внимание на нарушения и, возможно, критические места осматриваются с более близкого расстояния. Дополнительно, видеоматериал, записанный во время облета, может позже анализироваться в автономном режиме. Этот метод позволяет контролировать большие площади, но выгоды от облета зависят от опыта используемого персонала. Из-за этого не может гарантироваться воспроизводимость результатов.
Поэтому существующие в настоящее время подходы решений связаны с высокими трудозатратами и с высокой стоимостью, которые вытекают из ручных проверок и анализа, а также отсутствия оцифровки наблюдений.
В соответствии с изобретением теперь для визуализации и валидации событий процесса в системах SCADA анализируются состояния, зарегистрированные стационарно установленной системой датчиков, и при превышении заранее заданных предельных значений планируется и выполняется локальный сбор данных с помощью мобильного датчика. Результат этого сбора данных визуализируется в системе SCADA.
Предпочтительно, сбор данных состоит в записях (съемках), выполняемых датчиками изображения, такими как камеры, NIR-камера или LiDAR.
Эти записи анализируются и оцениваются в системе SCADA.
Является выгодным, если датчик изображения расположен на воздушных платформах. Сюда включаются как UAV (беспилотные летательные аппараты), такие как производящие автономный полет или управляемые пилотами дроны, так и пилотируемые воздушные платформы, такие как вертолеты или самолеты.
Из записей мобильных датчиков могут быть получены информации об условиях на земной поверхности или объектов и районов, релевантных для оператора оборудования.
В качестве примера, соответствующий изобретению способ осуществляется как ориентированный на задачу процесс, который выполняется компонентом Сервер Задач системы SCADA.
Запросы на Сервер Задач обозначаются как задачи, которые определяются по их типу, параметрам ввода и результатам как показатели или слои. Примерами задач являются: ʺИмпортировать опорную модельʺ для импортирования модели с геопривязкой, ʺПолучение изображенийʺ для выполнения облета с последующим импортом записей или специфические для приложений задачи, такие как расчет насыпей трубопроводов, изменения местности или распознавание аномалий.
Как показано на фиг. 1, обработка задачи разделяется на частичные этапы запуска TR, сбора AC, обработки PR и визуализации VI или обогащения данных процесса PDE. Весь процесс организуется и контролируется Сервером Задач.
Ход выполнения задачи обрабатывается с помощью соответствующих асинхронных вызовов услуг компьютерного зрения, взаимодействий с базами данных и доступов к файловой системе, и результаты возвращаются в систему SCADA.
Первый этап запуска TR, то есть, инициирование соответствующего изобретению способа может, например, осуществляться посредством критического значения процесса или результата вычисления в системе SCADA. Например, нетипичные перепады давления в определенном положении трубопровода могут быть указанием на утечку в трубопроводе. Также определенные погодные условия могут представлять собой этот запуск TR. Наряду с основанным на событии созданием новой задачи, также могут планироваться получения изображения в установленные моменты времени. Оператор WinCC OA может для этого выбирать область интереса (ROI) трубопровода, которая является основой для последующего планирования полетов.
В WinCC OA, посредством компонента, действующего в качестве так называемого менеджера (Менеджера Задач) запрос с имеющейся гео-информацией передается на компонент Сервер Задач. Сервер Задач принимает запросы и обрабатывает их в зависимости от переданных параметров.
На втором этапе сбора AC, то есть получения информации изображения, например, с помощью дронов, генерируется полетный план для облета, предпочтительно автоматически с помощью параметров задачи из системы SCADA.
Предпосылкой для этого является то, что доступна гео-информация стационарных датчиков, так что отсюда может быть получен действительный маршрут над областями с подозрительными или критическими значениями процесса. Полетный план может создаваться вручную или настраиваться, при этом определяются точки пути для облета.
Собственно облет, в зависимости от технических и нормативных условий, выполняется автономно посредством воздушной платформы и планирования ее полета или поддерживаются вручную пилотом.
На третьем этапе, так называемой обработке PR, то есть вычислении показателей, в зависимости от типа и параметров задачи, Сервером Задач вызываются модули компьютерного зрения для расчета, например, насыпей вдоль трубопровода (глубины покрытия) или распознавания изменений во времени (обнаружение изменения). Все результаты и метаданные анализа в ходе обогащения данных процесса сохраняются в базе данных Сервера Задач, так что гарантируется контролируемость процессов, и показатели могут интегрироваться в изображение оборудования системы SCADA.
Результаты анализа изображений могут представлять собой показатели или слои, которые могут быть визуализированы в пространственном и временном контексте на Сервере Карт (например, гео-сервере).
На четвертом этапе визуализации VI в SCADA, результаты делаются доступными также в системе SCADA посредством компонента Менеджер Задач и интерфейса к Серверу Задач. Таким образом, они могут представляться непосредственно в пользовательском интерфейсе SCADA или рассматриваться совместно с существующими данными процесса.
Для реализации соответствующего изобретению способа в качестве ориентированного на задачу процесса согласно примеру выполнения, предусмотрена гибкая архитектура согласно фиг. 2, которая просто интегрируется в существующую систему SCADA как WinCC OA и открыта для различных отраслей промышленности и приложений за счет модульной конструкции.
Основным элементом этой архитектуры является Сервер Задач, который принимает запросы системы SCADA и обрабатывает их в соответствии с их типом и их параметрами.
Таким образом, Сервер Задач выполняет следующие задачи:
- Прием различных запросов задач, таких как проведение облетов над определенной областью, расчеты на основе полученных записей или предыдущих результатов
- Управление задачами и проектами для полной контролируемости расчетов
- Импорт записей по облетам и метаданных в реляционную базу пространственных данных
- Вызов услуг компьютерного зрения в зависимости от параметров запроса задачи для расчета показателей и генерирования слоев
- Создание объектов Слои в Сервере Карт (например, GeoServer) для визуализации гео-данных и предоставления основанной на местоположении информации о стандартизованных интерфейсах, таких как услуга Веб-Карты (Web Map Service, WMS), услуга Веб-Покрытие (Web Coverage Service, WCS), услуга Веб-Функции (Web Feature Service, WFS) и услуга Веб-Обработка (Web Processing Service (WPS)
- Интерфейс с существующим программным обеспечением SCADA для возврата результатов и визуализации в пользовательском интерфейсе SCADA.
Соответствующая изобретению архитектура системы, показанная на фиг. 2, может разделяться на слои пользовательского интерфейса UI, внутренней части BE, хранилища ST и компьютерного зрения CVS. Все слои способны обрабатывать, сохранять или визуализировать данные. Модульная и ориентированная на услугу структура обеспечивает возможность преобразования новых случаев приложений и привязку других услуг компьютерного зрения.
Пользовательский интерфейс UI системы SCADA используется для визуализации результатов облетов. За счет этого оператор оборудования и пользователь SCADA могут рассматривать их как обычные значения процесса и анализировать их контекст. Кроме того, посредством Сервера Карт (например, GeoServer) и соответствующих виджетов в пользовательском интерфейсе UI, могут представляться материал карт и сгенерированные слои. Поскольку Сервер Задач TS предусмотрен в качестве компонента, независимого от системы SCADA, интерфейс программирования, предоставленный через услуги веб-сокетов (Websocket), также позволяет осуществить привязку дополнительных реализаций пользовательского интерфейса, таких как пользовательские плоскости на веб-основе.
Сервер Задач включает в себя логику обработки для задач, запрашиваемых с пользовательского интерфейса, а также предоставляет интерфейсы для клиентов. В качестве внутренней части BE в общей архитектуре, Сервер Задач взаимодействует с программным обеспечением SCADA, базой данных изображений и реляционной базой пространственных данных в качестве хранилища данных, а также с услугами компьютерного зрения, которые необходимы для обработки задач. Кроме того, интегрируется модуль аналитики, который поддерживает анализ значений процесса SCADA с использованием методов глубинного (интеллектуального) анализа данных, и, таким образом, может генерировать дополнительные триггеры.
Предусмотрены три хранилища данных, архивная база данных, хранилище данных информации задач, а также база данных изображений.
Архивная база данных является частью программного обеспечения SCADA и предоставляет возможность архивировать все зарегистрированные датчиками значения процесса. Это также является предпосылкой для того, чтобы значения процесса вместе с результатами анализа изображений рассматривать с течением времени.
Хранилище данных информации задач является частью компонента Сервер Задач и предусматривается как реляционная база пространственных данных (например, Oracle Spatial). Все запросы на Сервер Задач хранятся в этой базе данных с параметрами, данными регистрации и результатами алгоритмов компьютерного зрения, чтобы обеспечить полную контролируемость процессов.
В базе данных также сохраняются, с гео-привязкой, пространственные объекты, такие как растровые и векторные слои, которые визуализируются Сервером Карт.
База данных изображений реализована в качестве базы данных для хранения файлов (NAS) и служит для хранения исходных изображений процедуры получения изображений. На них даются ссылки базе данных информации задач, и они могут быть вводом в алгоритмы компьютерного зрения.
Посредством услуг (Websocket/REST) предоставляются функции компьютерного зрения, которые вызывает Сервер Задач для обработки рабочих потоков задачи. Входными данными для расчета обычно являются записи, сделанные посредством облета, или слои, сгенерированные в прошлых задачах.
Примерами услуг компьютерного зрения являются вычисление объектов ʺзоныʺ, таких как цветовые и высотные слои или специфические для приложения слои, такие как глубина покрытия для представления и анализа насыпи или изменения для распознавания изменений местности. Используемые алгоритмы являются отчасти вычислительно интенсивными и обрабатывают большие объемы данных, поэтому специальные аппаратные средства, такие как CUDA, используется для параллельного вычисления.
Наряду с Сервером Задач в качестве внутренней части BE в общей архитектуре, пользовательский интерфейс UI является еще одним важным компонентом соответствующей изобретению архитектуры системы. Оператор оборудования применяет пользовательский интерфейс UI своего программного обеспечения SCADA для контроля и управления процессами и состояниями, которые в текущее время описываются значениями процесса.
За счет того, что они обогащены автоматически генерируемыми результатами из облетов и совместно анализируются в пользовательском интерфейсе UI SCADA, пользователь получает расширенное представление о своем оборудовании. Виджеты Карты поддерживают отображение материала карт и слои, которые наряду с показателями генерируются Сервером Задач. Тем самым оператор оборудования может контролировать свою инфраструктуру снабжения в пространственном контексте.
Чтобы проиллюстрировать использование Сервера Задач и интегрированного представления результатов в пользовательском интерфейсе UI SCADA, вычисление насыпи и слоя ʺглубины покрытияʺ описывается в качестве возможного случая применения.
Фиг. 3 показывает в качестве примера пользовательский интерфейс UI, интегрированный в программное обеспечение SCADA WinCC OA, для анализа насыпи вдоль участка трубопровода.
Глубина слоя покрытия вычисляется посредством алгоритмов компьютерного зрения и содержит насыпь трубопровода, то есть сколько материала имеется над трубопроводом. Для оператора оборудования, насыпь является существенным показателем, так как должно быть гарантировано минимальное значение, и слишком низкое значение в экстремальном случае означало бы открытое (не засыпанное) состояние трубопровода и, таким образом, высокий риск его повреждения. Также слишком высокое значение может предоставить указание на оползень и места, связанные с риском.
Для этого случая применения предусмотрен пользовательский интерфейс UI, который визуализирует трубопровод и сгенерированные слои в географическом контексте. Вычисленные числовые значения для насыпи также представляются на двумерной диаграмме.
С помощью функции ʺнайти ближайшее изображениеʺ также может создаваться ссылка с записанные первоначальные изображения. Примерный пользовательский интерфейс UI обеспечивает два различных вида, GisView или ModelView. В виджете GisView могут включаться и вырезаться различные слои, которые ранее были сгенерированы Сервером Задач и визуализированы Сервером Карт.
В окне отображается материал карты, например, OSM (Open Street Map, открыть карту улицы), и при этом пользователю SCADA предоставляется гео-информация, например, названия населенных пунктов, названия улиц и природные особенности. Так называемый цветовой слой создается из записанных изображений (съемки) и отображает снятую область в перспективе с птичьего полета.
Критические значения насыпи на слое глубины покрытия обозначаются в цвете уже на представлении карт и могут рассматриваться более детально с помощью функции увеличения масштаба виджета.
Высотный профиль и профиль насыпи ʺпрофиль высоты и глубиныʺ является двумерным представлением трубопровода и визуализирует, с одной стороны, абсолютную высоту трубопровода на основе его опорной модели, а с другой стороны, насыпь относительно высоты трубопровода. Цветовое представление критических значений насыпи аналогично представлению в виджете GisView. Красная точка представляет связь между GisView и профилем высоты и глубины и может устанавливаться пользователем.
Если нажат значок переключения ʺнайти ближайшее изображениеʺ, то посредством функций Сервера Задач в виджете Вид Изображения отображается ближайшее к фрагменту карты первоначальное изображение. С помощью этой функции оператор может осматривать в интерактивном режиме критические места крупномасштабных трубопроводов с очень высокой степенью детализации.
Кроме того, так называемая сегментированная таблица отображается в отдельном окне. Для этого, последовательные критические значения покрытия группируются в сегменты и представляются в соответствии с их минимальным значением насыпи. Логика ʺсветофораʺ указывает оператору оборудования длинные участки с высоким потенциалом риска.
Перечень ссылочных позиций
UI пользовательский интерфейс
BE внутренняя часть
ST хранилище
CVS услуги компьютерного зрения
TR запуск
AC сбор
PR обработка
VI визуализация
PDE обогащение данных процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ сбора, обработки, хранения и передачи цифровых данных | 2018 |
|
RU2706587C1 |
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ УДАЛЕННЫМИ ПРИБОРАМИ | 2006 |
|
RU2426234C2 |
| Способ и система для контроля состояния группы установок | 2013 |
|
RU2636095C2 |
| СПОСОБ ТЕЛЕМЕХАНИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ УДАЛЕННЫМИ ОБЪЕКТАМИ С ИСПОЛЬЗОВАНИЕМ КАНАЛА СВЯЗИ GSM GPRS, ЕДИНОГО СЕРВЕРА ТЕЛЕМЕХАНИКИ И ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2455768C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АННОТИРОВАНИЯ ИНФОРМАЦИИ О ТОЧКАХ ИНТЕРЕСА | 2011 |
|
RU2559741C2 |
| СПОСОБЫ ДЛЯ АДАПТИРОВАНИЯ ИНТЕРПРЕТИРУЮЩЕГО ВРЕМЯ ВЫПОЛНЕНИЯ ПРИЛОЖЕНИЯ ДЛЯ МНОЖЕСТВЕННЫХ КЛИЕНТОВ | 2012 |
|
RU2608472C2 |
| Инженерный симулятор процесса добычи и транспортировки продукции скважин | 2018 |
|
RU2703359C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ВСЕЙ УСТАНОВКОЙ И ЕЕ РЕГУЛИРОВАНИЕМ, А ТАКЖЕ СООТВЕТСТВУЮЩИЙ ЕЙ СПОСОБ | 2015 |
|
RU2674756C1 |
| ОБНАРУЖЕНИЕ ЗАРАЖЕНИЯ РАСТЕНИЙ БОЛЕЗНЯМИ ПУТЕМ КЛАССИФИКАЦИИ ФОТОСНИМКОВ РАСТЕНИЙ | 2019 |
|
RU2805670C2 |
| ВЗАИМОДЕЙСТВУЮЩИЕ МОДУЛЬНЫЕ СРЕДСТВА СБОРА УДОСТОВЕРЕНИЙ И ДОСТУПА | 2004 |
|
RU2369025C2 |
Изобретение относится к способу для визуализации и валидации событий процесса в системах контроля процессов, содержащему следующие признаки: - стационарно установленная система датчиков сообщает состояния в систему контроля процесса, - при превышении заданных предельных значений система контроля процесса запускает, планирует и выполняет локальный сбор данных с помощью мобильного датчика, - результат этого сбора данных анализируется в системе контроля процесса, визуализируется и интегрируется в информацию состояния о процессе или оборудовании. Заявленное изобретение направлено на снижение трудозатрат, автоматизацию проверок и анализа, а также оцифровку наблюдений с целью обнаружения изменений. 2 н. и 2 з.п. ф-лы, 3 ил.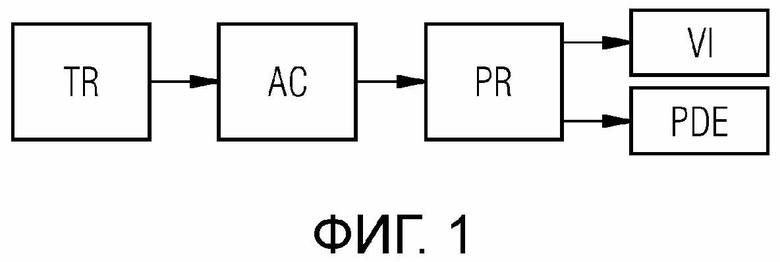
1. Способ визуализации и валидации событий процесса в системах контроля процессов, содержащий следующие признаки:
- стационарно установленная система датчиков сообщает состояния в систему контроля процесса,
- при превышении заданных предельных значений компонент Сервер Задач системы контроля процесса запускает, планирует и выполняет (ТR, АС) локальный сбор данных с помощью мобильного датчика,
- результат этого сбора данных в компоненте Сервер Задач системы контроля процесса анализируется (PR), визуализируется (VI) и интегрируется (PDE) в информацию состояния о процессе или оборудовании.
2. Способ по п. 1, отличающийся тем, что мобильный датчик установлен на воздушной платформе, такой как дрон, вертолет или самолет.
3. Способ по п. 1 или 2, отличающийся тем, что в качестве мобильных датчиков предусмотрены камеры, NIR-камеры или LiDAR-системы.
4. Система для управления и контроля технических процессов и оборудования, которая включает в себя средства для сбора, хранения и оценки данных, релевантных для процессов и оборудования, средства для визуализации (UI), средства управления и средства для запуска предупредительной сигнализации при превышении или снижении ниже предельных значений заданных параметров процессов или оборудования, отличающаяся тем, что предусмотрен компонент Сервер Задач, который после запуска локального сбора данных с помощью мобильного датчика планирует и управляет ходом сбора данных и анализирует результат сбора данных.
| WO 2015147871 A1, 01.10.2015 | |||
| WO 2014029431 A1, 27.02.2014 | |||
| WO 2015147871 A1, 01.10.2015 | |||
| WO 2015191444 A2, 17.12.2015 | |||
| US 9201910 B2, 01.12.2015. |

