Изобретение относится к области измерений, мониторинга, контроля состояния и поиска мест повреждения вибронагруженных объектов, типа и мест внешнего воздействия на вибронагруженные объекты в целях своевременного определения износа элементов объекта, внешних воздействий и предотвращения их разрушения.
Определение координат повреждения и мест внешнего воздействия на вибронагруженные объекты позволит понизить аварийность сложных технических устройств (самолетов, искусственных спутников земли, кораблей, жилых и не жилых сооружений, мостов, и д.р.) повысить их ресурс и предотвратить травматизм (гибель) эксплуатирующего и обслуживающего персонала.
Известен способ оценки технического состояния механизмов по авторскому свидетельству №506777 от 19.06.72, МПК G01M 13/02 опубл. в бюллетень №10 15.03.76 [1], заключающийся в том, что измеряют амплитуды, составляющих спектра вибраций, преобразуют значения, пропорциональные величинам соответствующих погрешностей и сравнивают полученные амплитуды с допустимыми.
Недостатком данного способа является ограниченность применения способа, так как он используется для оценки технического состояния преимущественно механизмов с зубчатыми передачами, не учитывает изменение параметров от свойств вибродиагностирующего канала, в частности от нелинейности его амплитудно-фазовой характеристики и амплитуды возбуждающего воздействия, пропорциональной степени износа механизмов, узлов, погрешности измерений.
Известен способ вибродиагностики машин по патенту RU №2314508 С1 от 10.10.06, МПК G01M 15/00; G01M 7/02 опубл. 10.01.08 [2], заключающийся в измерении параметров виброакустического сигнала, выделении составляющих, соответствующих дефектам и неисправностям, корректировании их с помощью функции коррекции и сравнения полученных значений и составляющих виброакустического сигнала с допустимыми величинами.
Недостатком данного способа является необходимость нахождения корректирующей функции амплитудно-частотных и фазо-частотных характеристик по сигналам, получаемым с двух или более вибродатчиков, размещенных на корпусе объекта; способ неприменим для диагностики агрегатов, выполненных в едином закрытом корпусе, так при его реализации необходимо использовать два и более датчика вибрации таким образом, чтобы получать от них различные сигналы вибраций элементов агрегата.
Известен способ измерения разборчивости речи (Пат. 2620569 от 26.05.2017 Российская Федерация, МПК G10L 15/00 (2006/01) [3]. Способ измерения разборчивости речи [3], основанный на использование виброакусто-оптического эффекта, для распознавания речи в оптическом волокне.
Недостатком данного способа является отсутствие возможности определения точного места положения источника виброакустического воздействия.
Известен способ одновременного измерения разборчивости речи нескольких источников (RU, патент 2 690 027 С1, МПК H04R 29/00 (2006.01), СПК H04R 29/00 (2018.08), 2019, Бюл. №16) [4]. Способ одновременного измерения разборчивости речи нескольких источников [4], заключающийся в том, что прокладывают по заданным точкам выделенного помещения пространственно-распределенный преобразователь акустического сигнала, представленный оптическим волокном, программно разбивают его на K измерительных участков и задают K точек измерения, каждая из которых выступает отдельным приемником акустических сигналов, что в совокупности с измерительным модулем позволяет произвести разборчивость речи от М источников одновременно.
Недостатком данного способа является отсутствие возможности определения точного места положения каждого источника виброакустического воздействия.
Наиболее близким аналогом является способ определения координат места падения боеприпаса (RU, патент 2 730 420 С1, МПК F41J 5/00 (2006.01), G01V 1/24 (2006.01), G01V 1/30 (2006.01), СПК F41J 5/00 (2020.02); G01V 1/24 (2020.02); G01V 1/30 (2020.02), 2020, Бюл. №24) [5]. Способ определения координат места падения боеприпаса [5] заключающийся в определения координат точки падения боеприпаса, основанном на установке на испытательном полигона сейсмических регистраторов, приеме и анализе параметров сейсмических колебаний, определении координат точки удара боеприпаса о грунт - эпицентра сейсмических колебаний по их параметрам, в грунт измерительной площадки посредствам распределенного преобразователя сейсмических колебаний (РПСК), представленного оптическим волокном (ОВ), таким образом, чтобы в двух и более направлениях было проложено не менее двух параллельных линий, программно разбивают его на N измерительных участков и задают K точек измерения, каждая из которых выступает отдельным приемником сейсмических колебаний, подключают РПСК к измерительному модулю (ИМ), расположенному на безопасном удалении от измерительной площадки, производят калибровку ИМ и после воздействия боеприпаса на полигон вычисляют по точкам первичного воздействия пеленги на центр формирования сейсмических колебаний, определяют центр формирования сейсмических колебаний в плоскости закладки РПСК от n точек измерения, вычисляют координаты эпицентра сейсмических колебаний – места падения боеприпаса.
Недостатком наиболее близкого аналога, использованного в качестве прототипа, является отсутствие возможности создания графической модели вибронагруженного объекта в Декартовой системе координат, отсутствие возможности создания базы данных с признаковыми характеристиками воздействий на вибронагруженные объекты, отсутствие возможности пополнения базы данных признаковыми характеристиками воздействий на вибронагруженные объекты, отсутствие возможности определения типа воздействия на вибронагруженные объекты, отсутствие возможности пополнения базы данных внешних воздействий, отсутствие возможности своевременного предупреждения о типе воздействия на вибронагруженные объекты в режиме реального времени, отсутствие возможности своевременного предупреждения о возможных местах нарушения целостности вибронагруженных объектов.
Техническим результатом изобретения является:
возможность своевременного предупреждения о типе воздействия на вибронагруженные объекты в режиме реального времени;
возможность своевременного предупреждения о возможных местах нарушения целостности вибронагруженных объектов;
возможность создания базы данных с признаковыми характеристиками воздействий на вибронагруженные объекты;
возможность пополнения базы данных признаковыми характеристиками воздействий на вибронагруженные объекты;
возможность определения типа внешних воздействий на вибронагруженные объекты.
Технический результат достигается тем, что в известном способе своевременного определения места и типа воздействия на вибронагруженный объект, заключающемся в том, что укладывают через необходимые точки мониторинга состояния объекта пространственно-распределенный преобразователь вибрационных колебаний, представленный оптическим волокном, подключают пространственно-распределенный преобразователь вибрационных колебаний к аппаратуре мониторинга состояния вибранагруженных объектов, программно разбивают пространственно-распределенный преобразователь вибрационных колебаний на N измерительных точек, при этом каждый из N измерительных точек выступает отдельным приемником вибрационных колебаний, производят калибровку каждой из N измерительных точек в соответствии с оптической длиной пространственно-распределенного преобразователя вибрационных колебаний, дополнительно формируют модель вибронагруженных объектов в Декартовой системе координат, проводят привязку каждой из N измерительных точек к местности с отметкой на сформированной графической модели объекта в Декартовой системе координат, задают максимальное время проведения измерений Тmax, создают базу данных критически важных амплитуд вибрационных колебаний An max и множество спектральных шаблонов {ВШnK} известных воздействий на каждую измеряемую точку мониторинга объекта, измеряют амплитуды вибрационных колебаний An i и регистрируют спектрограммы Вn i в эксплуатационных условиях объекта с периодом измерения ΔT в каждой из N измерительных точек, сравнивают результаты мониторинга по амплитуде вибрационных колебаний An i, если значение амплитуды вибрационных колебаний An i меньше заданной критически важной амплитуды вибрационных колебаний An max, то продолжают измерять параметры вибрационных колебаний в эксплуатационных условиях объекта с периодом ΔT, если значение амплитуды вибрационных колебаний An i больше заданной критически важной амплитуды вибрационных колебаний An max, то сравнивают полученную спектрограмму Вn i с множеством спектральных шаблонов {ВШnK}, если полученная спектрограмма Вn i не соответствует ни одному из множества спектральных шаблонов {ВШnK}, то определяют характер воздействия, регистрируют новый спектральный шаблон воздействия ВШn+1K и пополняют базу данных, при выявлении соответствия полученной спектрограммы Вn i со спектральным шаблоном из множества спектральных шаблонов {ВШnK}, сигнализируют о месте и типе воздействия, проводят мониторинг объекта на протяжении всего времени эксплуатации.
Благодаря новой совокупности существенных признаков в заявленном способе обеспечивается своевременность, повышение точности определения координат износа (нарушения целостности, внешнего воздействия) протяженного вибронагруженного объекта и типа воздействия. В качестве вибродатчиков используется ОВ, которое заменяет любое необходимое количество точечных комбинаций приемников вибрационных воздействий.
Из уровня техники не выявлено решений, касающихся способов своевременного определения места и типа воздействия на вибронагруженный объект, характеризующихся заявленной совокупностью признаков, следовательно, предлагаемое изобретение соответствует критерию патентоспособности – «новизна».
Заявленный способ поясняется фиг. 1 – блок-схема способа своевременного определения места и типа воздействия на вибронагруженный объект.
Под вибронагруженным объектом понимаются объекты (конструкции), поверхности которых под воздействием нагрузки окружающей среды, механизмов, внешних факторов или иных процессов заставляют объект (конструкцию) совершать виброколебания [6].
Заявленный способ реализован в виде блок-схемы моделирования, представленной на фиг. 1.
В блоке 1 укладывают через необходимые точки мониторинга состояния объекта пространственно-распределенный преобразователь вибрационных колебаний (ПРПВК), представленный оптическим волокном.
Точкой мониторинга состояния объекта является достаточно необходимая поверхность контролируемого объекта, по вибрационному состоянию которой осуществляется оценка и принимается решение о дальнейшей эксплуатации объекта в целом.
В блоке 2 подключают ПРПВК к аппаратуре мониторинга состояния вибронагруженных объектов (МСВО), имеющего в своем составе измерительный блок (ИБ), описанный в патенте РФ 2 715 176 C1 МПК: G10L 15/00 (2013.01), H04B 10/25 (2013.01), G01R 29/08 (2006.01), СПК: G10L 15/00 (2019.08), H04B 10/25 (2019.08), 2020, Бюл. №6 [7]. Принцип действия ИБ с ПРПВК на основе ОВ реализован на принципе действия оптического рефлектометра. В ОВ (ПРПВК) лазером вводится мощное измерительное оптическое излучение и анализируются характеристики рассеянного на примесях, распределенных по всей длине ОВ (ПРПВК), отраженного назад оптического излучения. За счет чувствительности приемной части измерительного модуля к фазовой (амплитудной, частотной, поляризационной) модуляции (например, при использовании интерферометра Маха-Цендера (Быков В. П. Лазерная электродинамика. Элементарные и когерентные процессы при взаимодействии лазерного излучения с веществом. – М.: ФИЗМАТЛИТ, 2006, стр. 50 – 77)) [8] в ПРПВК возможно, как измерение вибрационных колебаний по всей тестируемой длине волокна, так и локализация измерения на любом его участке, за счет разного времени возврата отраженных от примесей оптических сигналов [4, 5].
В блоке 3 по средствам графических редакторов формируют модель вибронагруженных объектов в Декартовой системе координат.
В блоке 4 программно разбивают пространственно-распределенный преобразователь вибрационных колебаний на N измерительных точек [3,4,5,7], при этом каждый из N измерительных точек выступает отдельным приемником вибрационных колебаний. Под измерительной точкой понимается участок ОВ необходимый для осуществления измерения точки мониторинга. При необходимости, измеряемые точки могут уменьшаться, дробиться с целью повышения точности определения координат вибрационных воздействий.
В блоке 5 производят калибровку каждой из N измерительных точек в соответствии с оптической длиной ПРПВК. Излучают тестовый световой импульс в ПРПВК и по времени отраженного импульсного сигнала определяют границы ПРПВК [5]. Затем, излучая тестовые световые импульсы в ПРПВК, производят направленные вибрационные воздействия на ПРПВК и отмечают границы каждой из N измерительных точек.
В блоке 6 производят привязку каждой из N измерительных точек к местности с отметкой на сформированной в блоке 3 графической модели объекта в Декартовой системе координат, что позволяет оперативно определять и координировать действия по устранению неисправностей или иных воздействий на вибронагруженный объект.
В блоке 7 задают максимальное время проведения измерений Тmax.
Максимальное время проведения измерений Тmax задается большим или равным времени эксплуатации вибронагруженного объекта и имеет возможность корректировки в случае увеличения времени эксплуатации вибронагруженного объекта.
В блоке 8 создают базу данных критически важных амплитуд вибрационных колебаний An max и множество спектральных шаблонов {ВШnK} известных воздействий на каждую измеряемую точку мониторинга объекта, критерии выявления An max и {ВШnK}. База данных создается по результатам экспериментальных исследований.
В блоке 9 измеряют амплитуды вибрационных колебаний An i и регистрируют спектрограммы Вn i в эксплуатационных условиях объекта с периодом измерения ΔT в каждой из N измерительных точек. Период измерения ΔT выбирается в зависимости от длины ОВ. Период измерения ΔT должна быть больше времени прохождения оптического импульса по всей протяженности ОВ и обратно.
Амплитуды вибрационных колебаний An max и множество спектральных шаблонов {ВШnK} измеряются посредством когерентных рефлектометров входящих в состав измерительных устройств [7, 8]
В блоке 10 сравнивают результаты мониторинга по амплитуде вибрационных колебаний An i с критически важными амплитудами вибрационных колебаний An max из базы данных.
Если значение амплитуды вибрационных колебаний An i меньше заданной критически важной амплитуды вибрационных колебаний An max, то продолжают измерять параметры вибрационных колебаний в эксплуатационных условиях объекта с периодом измерения ΔT (бл. 9 фиг.1).
Если значение амплитуды вибрационных колебаний An i больше заданной критически важной амплитуды вибрационных колебаний An max, то переходят к блоку 11.
В блоке 11 сравнивают зарегистрированную спектрограмму Вn i с множеством спектральных шаблонов {ВШnK} из базы данных.
Если полученная спектрограмма Вn i не соответствует ни одному из множества спектральных шаблонов {ВШnK}
(бл. 8 фиг.1), то определяют характер воздействия (бл. 14 фиг. 1), регистрируют новый спектральный шаблон воздействия ВШn+1K (бл. 15 фиг.1) и пополняют базу данных (бл. 8 фиг. 1).
При выявлении соответствия полученной спектрограммы Вn i со спектральным шаблоном из множества спектральных шаблонов {ВШnK} сигнализируют о месте и типе воздействия (бл. 12 фиг. 1). Операторы принимают дальнейшие решения по подтверждению и оперативному устранению выявленных неисправностей или внешних воздействий.
В блоке 13 производится сравнение текущего времени проведения измерений Tт с максимальным временем проведения измерений Тmax. Если значение текущего времени проведения измерений Tт меньше максимального времени проведения измерений Тmax, то продолжают измерять параметры вибрационных колебаний в эксплуатационных условиях объекта с периодом измерения ΔT (бл. 9 фиг.1), иначе измерения прекращяются.
Мониторинг объекта проводят на протяжении всего времени эксплуатации.
Таким образом, за счет применения распределенного преобразователя вибрационных колебаний на основе оптического волокна с возможностью приема вибрационных колебаний в плоскости закладки оптического волокна от N измерительных точек в совокупности с измерительной аппаратурой мониторинга и пополняемой базой данных достигается выполнение технического результата.
Источники информации.
1. SU, авторское свидетельство №5 067 77 от 19.06.76, МПК G01M 13/02 (2000.01), 1976, Бюл. №10
2. RU, патент 2 314 508 С1, МПК G01M 15/00; G01M 7/02, 2008, Бюл. №1
3. RU, патент 2 620 569, МПК G10L 15/00 (2006/01), H04R 29/00 (2006.01), 2017, Бюл. №15
4. RU, патент 2 690 027 С1, МПК H04R 29/00 (2006.01), СПК H04R 29/00 (2018.08), 2019, Бюл. №16
5. RU, патент 2 730 420 С1, МПК F41J 5/00 (2006.01), G01V 1/24 (2006.01), G01V 1/30 (2006.01), СПК F41J 5/00 (2020.02); G01V 1/24 (2020.02); G01V 1/30 (2020.02), 2020, Бюл. №24
6. Писаренко Г.С., Яковлев А.П., Матвеев В.В. Вибропоглвщающие свойства конструкционных материалов. Справочник. Киев.: наукова думка, 1971. - 37о с.
7. RU, патент 2 715 176 C1 МПК G10L 15/00 (2013.01), H04B 10/25 (2013.01), G01R 29/08 (2006.01), СПК G10L 15/00 (2019.08), H04B 10/25 (2019.08), 2020, Бюл. №6.
8. Быков В. П. Лазерная электродинамика. Элементарные и когерентные процессы при взаимодействии лазерного излучения с веществом. – М.: ФИЗМАТЛИТ, 2006, стр. 50 – 77
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ | 2021 |
|
RU2755402C1 |
| СИСТЕМА НАВИГАЦИИ СУДОВ | 2022 |
|
RU2795999C1 |
| Способ измерения разборчивости речи | 2016 |
|
RU2620569C1 |
| Способ определения координат места падения боеприпаса | 2020 |
|
RU2730420C1 |
| УСТРОЙСТВО ОЦЕНКИ АКУСТИЧЕСКОЙ ОБСТАНОВКИ ОБСЛЕДУЕМОГО ОБЪЕКТА | 2019 |
|
RU2715176C1 |
| Способ спектральной вибродиагностики зарождающихся эксплуатационных дефектов элементов коробок передач транспортных средств | 2023 |
|
RU2834870C2 |
| Способ контроля многопараметрического объекта | 2021 |
|
RU2764389C1 |
| СПОСОБ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ СЕТИ СВЯЗИ С ПАМЯТЬЮ | 2020 |
|
RU2734103C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ РАЗБОРЧИВОСТИ РЕЧИ НЕСКОЛЬКИХ ИСТОЧНИКОВ | 2018 |
|
RU2690027C1 |
| Способ краткосрочного определения подготовки сильного сейсмического события | 2022 |
|
RU2805275C1 |

Изобретение относится к области измерений, мониторинга, контроля состояния и поиска мест повреждения вибранагруженных объектов в целях своевременного определения износа элементов объекта и предотвращения их разрушения, определения типа и места воздействия на объект. В ходе реализации способа формируют модель вибронагруженных объектов в декартовой системе координат, производят привязку каждой из измерительных точек к местности с отметкой на сформированной модели объекта в декартовой системе координат, задают максимальное время проведения измерений, создают базу данных критически важных амплитуд вибрационных колебаний и множество спектральных шаблонов известных воздействий на каждую измеряемую точку мониторинга объекта. Затем измеряют амплитуды вибрационных колебаний и регистрируют спектрограммы в эксплуатационных условиях объекта в каждой из измерительных точек. При этом сравнивают результаты мониторинга по амплитуде вибрационных колебаний, если значение амплитуды меньше заданной критически важной, то продолжают измерять параметры вибрационных колебаний, если значение амплитуды больше заданной критически важной амплитуды, то сравнивают полученную спектрограмму с множеством спектральных шаблонов, и если полученная спектрограмма не соответствует ни одному из множества спектральных шаблонов, то определяют характер воздействия, регистрируют новый спектральный шаблон воздействия и пополняют базу данных. При выявлении соответствия полученной спектрограммы со спектральным шаблоном из множества спектральных шаблонов сигнализируют о месте и типе воздействия, проводят мониторинг объекта на протяжении всего времени эксплуатации. Технический результат заключается в своевременности и повышении точности определения координат повреждения протяженных вибранагруженных объектов, что снизит аварийность сложных технических устройств (самолетов, искусственных спутников земли, кораблей, жилых и не жилых сооружений, мостов и др.), повысит их ресурс и предотвратит травматизм (гибель) эксплуатирующего и обслуживающего персонала. 1 ил.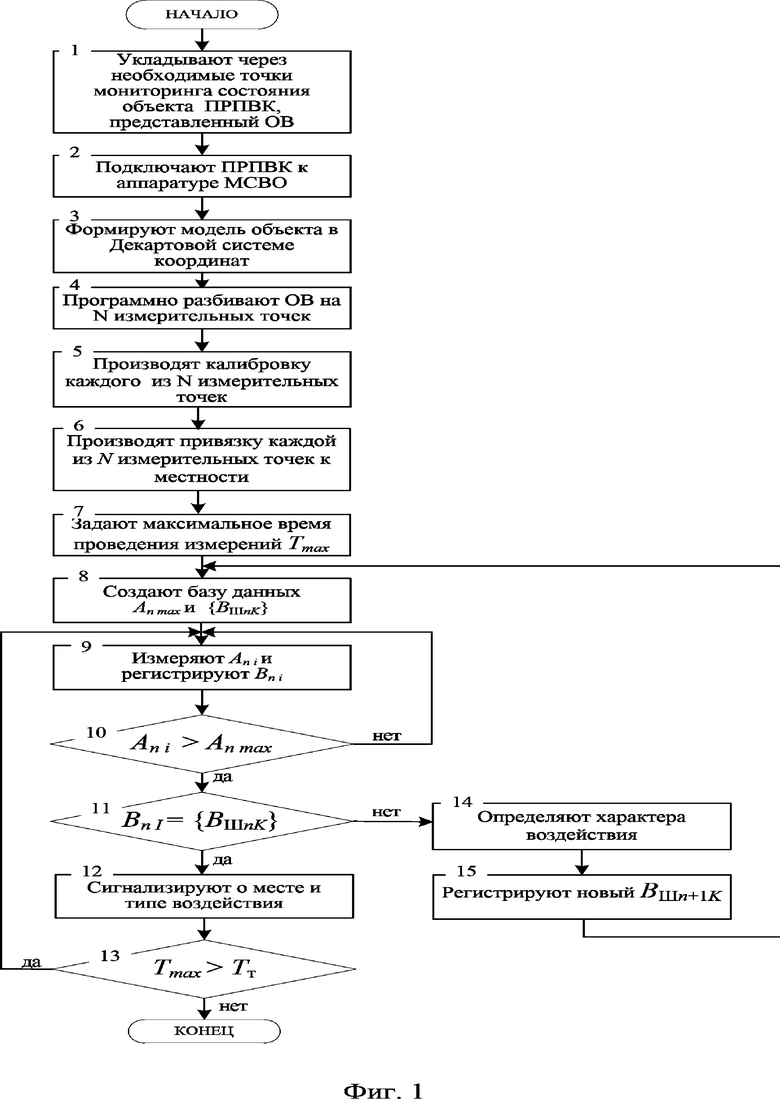
Способ своевременного определения места и типа воздействия на вибронагруженный объект, заключающийся в том, что укладывают через необходимые точки мониторинга состояния объекта пространственно-распределенный преобразователь вибрационных колебаний, представленный оптическим волокном, подключают пространственно-распределенный преобразователь вибрационных колебаний к аппаратуре мониторинга состояния вибронагруженных объектов, программно разбивают пространственно-распределенный преобразователь вибрационных колебаний на N измерительных точек, при этом каждая из N измерительных точек выступает отдельным приемником вибрационных колебаний, производят калибровку каждой из N измерительных точек в соответствии с оптической длиной пространственно-распределенного преобразователя вибрационных колебаний, отличающийся тем, что формируют модель вибронагруженных объектов в Декартовой системе координат, производят привязку каждой из N измерительных точек к местности с отметкой на сформированной модели объекта в Декартовой системе координат, задают максимальное время проведения измерений Тmax, создают базу данных критически важных амплитуд вибрационных колебаний An max и множество спектральных шаблонов {ВШnK} известных воздействий на каждую измеряемую точку мониторинга объекта, измеряют амплитуды вибрационных колебаний An i и регистрируют спектрограммы Вn i в эксплуатационных условиях объекта с периодом измерения ΔT в каждой из N измерительных точек, сравнивают результаты мониторинга по амплитуде вибрационных колебаний An i, если значение амплитуды вибрационных колебаний An i меньше заданной критически важной амплитуды вибрационных колебаний An max, то продолжают измерять параметры вибрационных колебаний в эксплуатационных условиях объекта с периодом ΔT, если значение амплитуды вибрационных колебаний An i больше заданной критически важной амплитуды вибрационных колебаний An max, то сравнивают полученную спектрограмму Вn i с множеством спектральных шаблонов {ВШnK}, если полученная спектрограмма Вn i не соответствует ни одному из множества спектральных шаблонов {ВШnK}, то определяют характер воздействия, регистрируют новый спектральный шаблон воздействия ВШn+1K и пополняют базу данных, при выявлении соответствия полученной спектрограммы Вn i со спектральным шаблоном из множества спектральных шаблонов {ВШnK} сигнализируют о месте и типе воздействия, проводят мониторинг объекта на протяжении всего времени эксплуатации.
| Способ определения координат места падения боеприпаса | 2020 |
|
RU2730420C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ РАЗБОРЧИВОСТИ РЕЧИ НЕСКОЛЬКИХ ИСТОЧНИКОВ | 2018 |
|
RU2690027C1 |
| СПОСОБ И СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНЫМ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ В ПРЕДЕЛАХ УСТАНОВЛЕННОЙ ЗОНЫ АЭРОДРОМА | 2012 |
|
RU2521450C2 |
| СПОСОБ И СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНЫМ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ В ПРЕДЕЛАХ УСТАНОВЛЕННОЙ ЗОНЫ АЭРОДРОМА | 2012 |
|
RU2521450C2 |
| WO 2011058312 A2, 19.05.2011 | |||
| СПОСОБ ОБНАРУЖЕНИЯ, ОПРЕДЕЛЕНИЯ КООРДИНАТ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2564385C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ МАШИН | 2006 |
|
RU2314508C1 |

