Изобретение относится к системам объективного контроля и управления движением воздушных судов (ВС) и обслуживающей техники в виде транспортных средств (ТС) по территории аэропорта, включая взлетно-посадочные полосы (ВПП), рулежные дорожки, места стоянки техники.
Известны следующие способы контроля наземного движения в зоне аэропорта: визуальный - наблюдение непосредственно диспетчерами с вышки; по докладам экипажей; радиолокационный и оптико-локационный.
Визуальный способ, как и оптико-локационный, имеет ограничения по погодным условиям (туман, интенсивные атмосферные осадки).
Способ, основанный на докладах экипажей, не является объективным и в ряде случаев в истории авиации приводил к катастрофам.
К настоящему времени наилучшие результаты дают радиолокаторы контроля наземного движения и плавный переход от ситуации с наземным движением к изображению захода на посадку и наоборот (http://www.easat.com/ru/svstems/air-traffic-control/surface-movement-radar).
Однако в условиях одновременной работы многочисленных радиоэлектронных средств (локаторы, дальномеры, связные радиостанции) возникают помеховые ситуации. Требуется получение разрешения на использование радиочастот. Возможны ситуации затенения одних объектов другими, а также ложные отметки, обусловленные наличием боковых лепестков антенны локатора.
Известен также способ (http://www.sra.com/media/era/ru-mss-by-era-final-fixed copy-web, pdf), основанный на измерении задержки радиосигналов от объектов, оснащенных ретранслятором.
Ограничением является необходимость оснащения ретранслятором всех подвижных объектов. Объект, не оснащенный ретранслятором, не может быть обнаружен. Кроме того, при наличии переотражений радиосигнала вероятно получение ложных координат подвижных объектов.
Известен способ, согласно которому контроль движения ВС осуществляется посредством взаимодействия переднего колеса шасси ВС с некоторым числом заделанных в грунт датчиков, расположенных последовательно в направлении движения ВС, при этом используются индуктивные измерительные шлейфы (DE 2743281, 1980).
Недостатком данного способа является необходимость выполнения литьем измерительных шлейфов в грунте. В результате чего они часто выходят из строя при движении ВС. Кроме того, все системы такого типа не могут также использоваться для обеспечения или воспроизведения на экране дисплея любой другой информации, кроме информации, предназначенной для установки ВС на место стоянки.
Известен способ управления наземным движением ВС и средств механизации, заключающийся в определении местоположения ТС на пути его перемещения посредством датчиков, включении оптической сигнализации сопровождения и барьера остановки, автоматическом задействовании дискретной предупреждающей сигнализации перед выездом на ВПП, которое осуществляют при несанкционированном пересечении барьера остановки в импульсном режиме включения прожекторов, установленных с возможностью перекрытия поля зрения пилота, при этом в диспетчерском пункте автоматически включается звуковая и световая тревожная сигнализация (RU 2080033, 1997).
Недостатком известного способа является ограниченность его применения по погодным условиям.
Известно техническое решение, в соответствии с которым осуществляют обнаружение, идентификацию и слежение за подвижными объектами. Управляют швартовкой (постановкой на стоянку), например, ВС и контролируют наземное движение подвижных объектов на летном поле. Используют лазерные импульсы для получения профиля объекта на расстоянии. Сначала сканируют участок перед воротами до тех пор, пока не обнаружат и не идентифицируют объект. Когда идентичность объекта известна, отслеживают объект. Используя информацию от профиля, можно в реальное время отображать тип самолета, расстояние от точки остановки и боковую позицию самолета (RU 2155384, 2000).
Несмотря на определенное повышение точности и безопасности перемещения подвижных объектов, известный способ достаточно сложен в осуществлении.
Известен способ оперативного сопровождения и управления наземными ТС аэропорта, включающий составление геоинформационной системы территории аэропортового комплекса (АПК), определение координат ТС в реальном масштабе времени с использованием средств спутникового позиционирования, контроль за скоростью и/или маршрутами движения ТС и управление движением ТС. Дополнительно постоянно контролируют состояние ТС и/или время выполнения работ каждым ТС и осуществляют управление движением и выполнением работ ТС в соответствии с временными технологическими графиками послеполетного обслуживания ВС на основе суточного плана полетов. Геоинформационную систему территории АПК составляют в двухмерной системе координат, а определение координат ТС осуществляют в относительных географических координатах (RU 2158963, 2000).
Недостаток - осуществление способа требует наличия сложной системы управления.
Известна система опознавания и наведения при парковке ВС, предназначенная для сопровождения при парковке ВС. Для опознавания ВС используют лазерный дальномер, который наводят на ВС и по отраженным сигналам получают контур и сравнивают с известными контурами. Для отличия от ВС с подобными контурами лазерный дальномер наводят на объем, в котором ожидается наличие признака, такого как двигатель, и на другой объем, в котором не ожидается наличие признака. Сигналы, отраженные из двух объемов, используют для определения, находится ли двигатель в ожидаемом местоположении. Если да, то ВС опознается как самолет ожидаемого типа и его допускают к парковке. В противном случае самолет останавливают. В качестве дополнительного идентификационного признака может использоваться высота носа ВС (RU 2268498, 2000).
Способ сложен в реализации, поскольку для его осуществления требуется сложная аппаратура.
Известен способ для содействия наземной навигации самолета в аэропорту. Согласно способу выполняют автоматически и многократно ряд последовательных этапов. В частности, определяют текущие значения множества параметров указанного самолета, с помощью указанных текущих значений определяют первое местоположение, относящееся к самолету, и сравнивают это первое местоположение с по меньшей мере одной запрещенной зоной. Если указанное первое местоположение находится в указанной запрещенной зоне, выдают по меньшей мере один сигнал тревоги. Первое местоположение соответствует экстраполированному местоположению носа самолета по прошествии особого временного интервала, начинающегося с текущего момента времени, во время наземной навигации самолета в аэропорту. Указанная запрещенная зона представляет собой заранее заданную запрещенную зону аэропорта. Для реализации способа имеется набор источников информации для определения активных значений множества параметров самолета. С использованием вычислительного средства определяют с помощью указанных активных значений первого местоположения, соответствующего местоположению, которое является экстраполированным относительно носа самолета по прошествии особого временного интервала от текущего момента времени. Используются также база данных, снабженная по меньшей мере одной заранее заданной запрещенной зоной аэропорта, средство сравнения указанного первого местоположения с заранее заданной запрещенной зоной аэропорта и средство предупредительной сигнализации для выдачи по меньшей мере одного предупредительного сигнала, если первое местоположение находится в запрещенной зоне (RU 2360292, 2009).
Недостатком известного способа является его сложность осуществления на практике.
Известно изобретение, относящееся к технике управления ВС, находящимся на земле. Каждый элемент аэродрома, который находится в поле индикации просмотрового экрана, снабжают формуляром, который содержит информацию, относящуюся к указанному элементу, что делает возможным осуществление воспроизведения особенно удобочитаемых и понятных изображений на указанном просмотровом экране, который представляет собой экран приборной доски самолета и, следовательно, обеспечивает возможность оказания помощи пилоту в части самостоятельного определения легким способом местоположения на аэродроме во время выруливания указанного самолета. При отображении используется средство для поиска элементов аэропорта, которые отображаются в поле индикации экрана. Имеется средство для проверки, будет ли каждый из указанных элементов составлять часть первой группы, для которой основная точка привязки находится внутри зоны формуляров, или второй группы, для которой основная точка привязки расположена за пределами зоны формуляров. Предусмотрены также средство для определения элементов второй группы дополнительной точки привязки, расположенной на пересечении оси указанного элемента и зоны формуляров, и средство для представления на экране каждого элемента формуляра, содержащего данные, относящиеся к указанному элементу. Формуляры, относящиеся к первой группе, расположены в основной точке, а формуляры, относящиеся ко второй группе, - в дополнительной зоне привязки (RU 2369908, 2009).
Известное изобретение позволяет исключить чрезмерную перегрузку поля отображения, однако является сложным в реализации.
Известен способ измерения полей механического напряжения в дорожных и аэродромных покрытиях на основе явления изменения емкости дифференциального, плоского конденсатора в виде матрицы элементарных плоских конденсаторов с конечными размерами для различных плоских типов покрытий, при этом для связи механических напряжений и электрической емкости внедряют в покрытие пьезоэлементы на стадии приготовления рабочей смеси материала покрытия в необходимой концентрации без нарушения сплошности и механических параметров покрытия (RU 2004115816, 2005).
Недостатком способа является его ограниченность, так как он позволяет только измерять механические напряжения в дорожных и аэродромных покрытиях.
Известен способ предотвращения проникновения подвижного объекта на участок транспортного пути. Способ заключается в определении местоположения подвижного объекта относительно заранее активированной границы временно запрещенного для использования участка пути. В случае установления нарушения активированной границы, выявленного путем сравнения с заранее установленной предельно допустимой величиной, активируется передающее устройство, которое передает предупреждающие сигналы для обработки их на подвижном объекте. Причем приемное средство подвижного объекта поддерживает несколько заранее предусмотренных каналов радиосвязи, а передающее устройство передает предупреждающие сигналы по всем заранее определенным каналам радиосвязи. Система содержит средство для сравнения удаленности подвижного объекта от границы с заранее установленной предельно допустимой величиной, передающее устройство, которое передает предупреждающие сигналы, приемное средство подвижного объекта, которое поддерживает несколько заранее предусмотренных каналов радиосвязи, и средства передачи предупреждающих сигналов (RU 2385499, 2010).
Известно устройство - система для предупреждения оператора подвижного объекта о проникновении подвижного объекта, по меньшей мере, на временно запрещенный для использования участок транспортного пути, включающая в себя:
активируемую заранее определенную границу временно запрещенного для использования участка; средство для определения местоположения подвижного объекта относительно этой границы;
средство для относительного сравнения удаленности подвижного объекта от границы с заранее установленной предельно допустимой ее величиной для определения, нарушается ли активированная граница подвижным объектом; имеющиеся на объекте средства для акустической и/или оптической передачи предупреждающих сигналов для оператора;
активируемое передающее устройство и установленное на подвижном объекте приемное устройство. При нарушении активированной границы при одновременном активировании границы активируется передающее устройство, чтобы передать приемному устройству подвижного объекта согласованные предупреждающие сигналы, и приемное устройство подвижного объекта поддерживает много заранее определенных каналов радиосвязи, а передающее устройство передает свои предупреждающие сигналы по всем этим заранее определенным каналам радиосвязи (RU 2385499, 2010).
Эти известные способ и устройство, его реализующее, предотвращают проникновения подвижного объекта на временно запрещенный для использования участок транспортного пути, однако наличие датчиков на пути движения ВС, каналов радиосвязи и средства для акустической и/или оптической передачи предупреждающих сигналов усложняет практическую реализацию этой группы технических решений.
Техническим результатом предложенной группы изобретений является расширение технологических возможностей по наблюдению и контролю за наземным движением подвижных объектов в пределах установленной зоны аэродрома независимо от погодных условий как в режиме обслуживания оператором, так и в автоматическом режиме при одновременной простоте его реализации.
Технический результат в отношении объекта изобретения - способа - достигается тем, что в нем при наблюдении за наземным движением подвижных объектов в пределах установленной зоны аэродрома, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки воздушных судов и обслуживающей техники, используют подключенный к когерентному оптическому рефлектометру чувствительный волоконно-оптический кабель (ВОК) в качестве виртуальных датчиков вибраций для обнаружения несанкционированных вторжений подвижных объектов на защищенную площадь поверхности в пределах установленной зоны аэродрома, предварительно проводят привязку координат характерных топографических точек на защищенной площади поверхности в пределах установленной зоны аэродрома к местоположению виртуальных датчиков вибраций, в процессе наблюдения за наземным движением подвижных объектов измеряют амплитуды и фазы регистрируемых вибраций и проводят совместную цифровую обработку полученной информации для отслеживания в режиме реального времени параметров движения подвижных объектов, их взаимного положения и положения относительно характерных топографических точек на защищенной площади поверхности.
Обычно наблюдают за наземным движением подвижных объектов, представленных воздушными судами и обслуживающей техникой.
Чаще, в качестве параметров движения подвижных объектов, используют их координаты местоположения, скорость движения и ускорение, причем их документируют, и при взлете воздушного судна дополнительно фиксируют время и координаты точки начала его разбега, динамику набора скорости движения, скорость и координаты точки отрыва, а при посадке - координаты точки касания, динамику снижения скорости движения.
Результаты отслеживания в режиме реального времени взаимного положения подвижных объектов и их положения относительно защищенной площади поверхности сопоставляют с регламентированными значениями и сигнализируют в случае их несоответствия.
В конкретном примере привязку координат характерных топографических точек в пределах установленной зоны аэродрома проводят путем создания вибраций или ударов вблизи этих точек и определения соответствующих каналов дальности когерентного оптического рефлектометра.
В качестве характерных топографических точек в пределах установленной зоны аэродрома используют пороги взлетно-посадочных полос, границы взлетно-посадочных полос, места ожидания, линии "стоп", сходы с взлетно-посадочных полос, пересечения рулежных дорожек, границы пересечений, границы блоков переключаемых огней осевой линии, места парковки и углы строений.
Преимущественно, в процессе наблюдения за наземным движением подвижных объектов их идентифицируют по типам воздушных судов на основе алгоритмов распознавания спектров вибраций в известных режимах работы их двигателей, например на малом газу, а обслуживающий техники по частоте оборотов двигателя в характерных режимах, например в режиме холостых оборотов, при этом используют спектры вибраций в диапазоне частот звуковых и инфразвуковых колебаний.
Технический результат в отношении объекта изобретения - система наблюдения за наземным движением подвижных объектов в пределах установленной зоны аэродрома достигается тем, что она включает чувствительный волоконно-оптический кабель, подключенный к когерентному оптическому рефлектометру и расположенный в пределах установленной зоны аэродрома вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и/или обслуживающей техники (ТС), при этом расположение чувствительного волоконно-оптического кабеля в плане повторяет конфигурацию расположения взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники (ТС).
Как правило, кабель выполнен неразрывным и может пересекать, по крайней мере, один раз взлетно-посадочную полосу, и/или рулежную дорожку, и/или место стоянки воздушных судов (ВС) и/или обслуживающей техники (ТС).
Обычно, чувствительный волоконно-оптический кабель бывает помещен в грунт вблизи границ взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов (ВС) и обслуживающей техники (ТС) на глубину 0,1-1,0 м.
В других случаях чувствительный волоконно-оптический кабель может быть помещен непосредственно под бетонное покрытие взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники или непосредственно в тело бетонного покрытия, при этом чувствительный волоконно-оптический кабель может быть расположен зигзагообразно вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники (ТС).
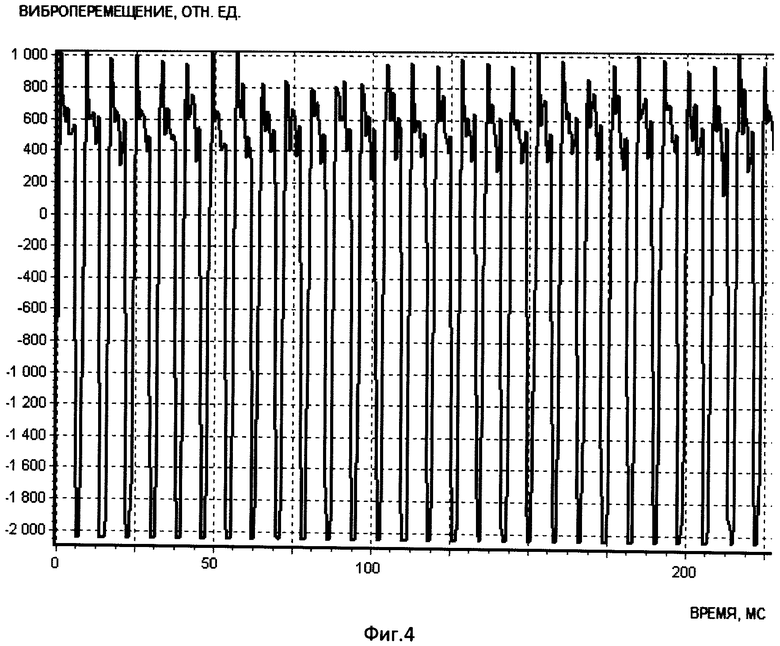
Предложение поясняется чертежами, на которых показаны: на фиг.1 - пример установленной зоны аэродрома (план); на фиг.2 - пересечение рулежной дорожки с взлетно-посадочной полосой (ВПП), характерное для сценария обнаружения несанкционированного выезда подвижного объекта - воздушного судна (ВС) - на ВПП; на фиг.3 - параметры продольных интервалов между ВС, находящимися в процессе последовательного наземного движения; на фиг.4 - экспериментально полученная осциллограмма колебаний грунта от двигателя автомобиля КРАЗ, находящегося на расстоянии 3 м от ВОК.
Техническая сущность предложения заключается в следующем. Вдоль ВПП, рулежных дорожек и мест стоянок воздушных судов (ВС) и обслуживающей техники (ТС) на глубине 0,1-1,0 м вблизи их границ закапывается чувствительный волоконно-оптический кабель (ВОК). Указанный кабель подключают к когерентному оптическому рефлектометру с образованием виртуальных датчиков (независимых сенсоров) вибраций, что дает возможность получить до десятков тысяч независимых виртуальных каналов измерения вибраций, распространяющихся в грунте (бетонном покрытии аэродрома). Когерентный оптический рефлектометр известен и описан (Горшков Б.Г. и др. Журнал Квантовая электроника, 2006, №10, с.963).
Информация от указанных виртуальных датчиков (вибродатчиков) предназначена для совместной обработки с целью получения координат местоположения и определения параметров движения подвижных объектов (скорости движения объектов их взаимного положения и положения относительно характерных топографических точек на защищенной площади поверхности) с учетом амплитуды и фазы регистрируемых колебаний.
При строительстве новых аэродромов предлагается вариант размещения чувствительного волоконно-оптического кабеля непосредственно под бетонным покрытием или в теле бетонного покрытия путем совместного расположения со стальной арматурой перед заливкой бетонным раствором.
В другом варианте кабель может быть уложен совместно с кабелями светосигнального оборудования. Возможен вариант использования специального кабеля с токопроводящими и оптическими жилами, который способен выполнять несколько функций - питать светосигнальное оборудование и одновременно являться чувствительным волоконно-оптическим кабелем, используемым в качестве виртуальных датчиков вибраций.
При значительной ширине перронов (взлетно-посадочных полос, рулежных дорожек и мест стоянок ВС и ТС) целесообразно на фазе строительства укладывать ВОК зигзагообразно (змейкой) вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники (ТС). Диапазон шага змейки может составлять 5-20 м. В этом случае точность определения координат местоположения подвижного объекта и чувствительность по отношению к легковесной технике (ВС и ТС) значительно повысятся.
Для обеспечения указанной точности целесообразно произвести привязку каналов дальности когерентного оптического рефлектометра с характерными топографическими точками в пределах установленной зоны аэродрома: пороги взлетно-посадочных полос, границы взлетно-посадочных полос, места ожидания, линии "стоп", сходы с взлетно-посадочных полос, пересечения рулежных дорожек, границы пересечений, границы блоков переключаемых огней осевой линии, места парковки и углы строений.
С этой целью в непосредственной близости от этих точек необходимо расположить источник вибраций или ударов и сопоставить этим точкам указанные каналы дальности.
Воздушные суда при разбеге и пробеге после посадки создают вибрацию грунта (почвы), достаточную для уверенного детектирования датчиком в реальном масштабе времени, с определением места максимального уровня вибраций с точностью до 5 м. При этом документируется время и место начала разбега, динамика набора скорости, скорость и координаты точки отрыва, а также соответствующие характеристики при посадке. Часть такого рода информации невозможно получить иными методами. Одна система позволяет отслеживать множество движущихся подвижных объектов (до десятков и сотен) без помех друг другу. Система не излучает в радиодиапазоне, не подвержена влиянию электромагнитных полей, электрически пассивна, пожаробезопасна, скрытна, не требует установки высоко расположенных антенн.
Сопровождение ВС ведется от момента начала движения до исчезновения вибрационного сигнала на скорости отрыва (в определенном диапазоне скоростей). Исчезновение такого сигнала при минимальной скорости означает остановку ВС. Положение его запоминается вплоть до возобновления движения. Время и место нахождения подвижных объектов документируется и хранится в базе данных.
Пример реализации способа показан на фиг.1. Волоконно-оптический кабель укладывается сбоку от ВПП и рулежных дорожек по территории аэродрома. Он присоединяется к когерентному оптическому рефлектометру. Длина кабеля может составлять до десятков километров. Благодаря рефлектометрическому принципу работы кабель может быть не замкнутым.
В практической реализации система наблюдения за наземным движением подвижных объектов в пределах установленной зоны аэродрома включает чувствительный волоконно-оптический кабель, подключенный к когерентному оптическому рефлектометру и расположенный в пределах установленной зоны аэродрома вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и/или обслуживающей техники. Передающие и приемные средства связи и оповещения, установленные на подвижных объектах,- штатные (например, радиосвязь, светоиндикация).
Использование изобретения позволит осуществлять контроль наземного движения в зоне аэродрома независимо от погодных условий как в режиме обслуживания оператором, так и в автоматическом режиме. Благодаря простоте и дешевизне системы, а также низкой стоимости монтажа наиболее перспективна ее установка в региональных аэропортах и авиабазах военно-воздушных сил. Предложение может быть применено и на грунтовых аэродромах.
В качестве примера использования предлагаемого способа приводим сценарий предотвращения несанкционированного выезда на ВПП в том случае, когда ВС пересекает место ожидания у ВПП (фиг.2). Несанкционированное пересечение линии ожидания при размещении чувствительного ВОК вдоль рулежных дорожек и ВПП будет обнаружено с задержкой не более 1 с в режиме реального времени с продольной точностью, определяемой разрешением когерентного оптического рефлектометра (типично 5 м, что меньше установленных предельных 20 м). Поскольку регистрируется вся история перемещения ВС по рулежной дорожке, предпосылка к конфликтной ситуации может быть обнаружена задолго до пересечения линии ожидания. Это обеспечивает больше времени для принятия ответных действий с целью избежания конфликтной ситуации.
При укладке ВОК с обеих сторон ВПП или рулежной дорожки поперечная точность определения положения ВС составит около 3 м, что также соответствует установленным требованиям.
В качестве второго примера предотвращения конфликтной ситуации рассмотрим потерю продольного интервала между двумя ВС (фиг.3). Минимальный продольный интервал St, определяющий безопасность двух ВС, в условиях плохой видимости может оказаться столь значительным, что существенно ограничит пропускную способность аэропорта. Минимальный продольный интервал St в общем случае определяют как
St=So+Sv+Ss+Sp,
где
So - расстояние обнаружения;
Sv - расстояние торможения;
Ss - запас безопасности;
Sp - запас с учетом длины ВС и влияния реактивной струи ВС.
Sp=Lj+La,
где
Lj - длина реактивной струи;
La - длина ВС.
Предлагаемый способ позволит в реальном времени отслеживать взаимное положение ВС, их скорость и ускорение и заранее обнаруживать конфликтные ситуации. Ожидаемая точность определения продольных интервалов - 10 м для однотипных ВС.
Помимо указанных функций, предложенная система способна выполнять охранные функции, сигнализируя о выходе на летное поле (защищенную площадь поверхности) людей. При разработке соответствующих алгоритмов распознавания спектров колебаний можно идентифицировать типы ВС (по частоте звуковых колебаний в известных режимах, например на малом газу) и обслуживающей техники (по колебаниям почвы с частотой оборотов двигателя в характерных режимах, например также в режиме холостых оборотов). Явно просматривается периодический характер колебаний на экспериментально полученной осциллограмме колебаний грунта от двигателя автомобиля КРАЗ, находящегося на расстоянии 3 м от ВОК (фиг.4), причем частота колебаний определяется числом цилиндров двигателя и числом оборотов двигателя.
Использование предложения расширяет технологические возможности по наблюдению и контролю за наземным движением подвижных объектов в пределах установленной зоны аэродрома независимо от погодных условий как в режиме обслуживания оператором, так и в автоматическом режиме при одновременной простоте его реализации.


Группа изобретений относится к системам контроля и управления движением воздушных судов. Способ наблюдения за наземным движением подвижных объектов в пределах установленной зоны аэродрома, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки воздушных судов и обслуживающей техники, включает использование подключенного к когерентному оптическому рефлектометру чувствительного волоконно-оптического кабеля в качестве виртуальных датчиков вибраций. Проводят привязку координат топографических точек на площади поверхности в пределах установленной зоны аэродрома к местоположению виртуальных датчиков вибраций. В процессе наблюдения измеряют амплитуды и фазы регистрируемых вибраций и проводят совместную обработку полученной информации. Система для реализации способа включает чувствительный волоконно-оптический кабель, подключенный к когерентному оптическому рефлектометру и расположенный в пределах установленной зоны аэродрома вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и/или обслуживающей техники. Расположение кабеля в плане повторяет конфигурацию расположения взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники. Достигается расширение функциональных возможностей. 2 н. и 14 з.п. ф-лы, 4 ил.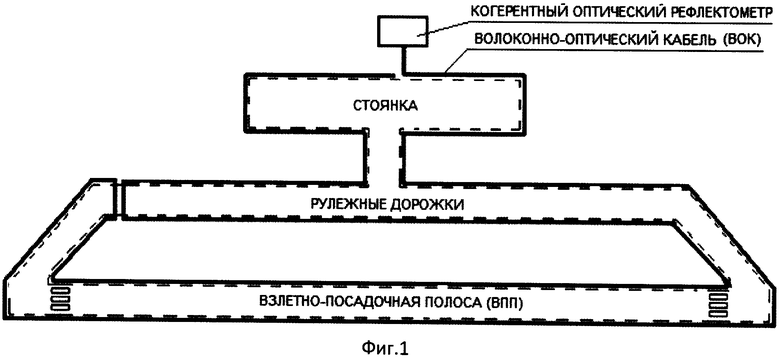
1. Способ наблюдения за наземным движением подвижных объектов в пределах установленной зоны аэродрома, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки воздушных судов и обслуживающей техники, включающий использование подключенного к когерентному оптическому рефлектометру чувствительного волоконно-оптического кабеля в качестве виртуальных датчиков вибраций для обнаружения подвижных объектов на защищенной площади поверхности в пределах установленной зоны аэродрома, при этом предварительно проводят привязку координат характерных топографических точек на защищенной площади поверхности в пределах установленной зоны аэродрома к местоположению виртуальных датчиков вибраций, в процессе наблюдения за наземным движением подвижных объектов измеряют амплитуды и фазы регистрируемых вибраций и проводят совместную цифровую обработку полученной информации для отслеживания в режиме реального времени параметров движения подвижных объектов, их взаимного положения и положения относительно характерных топографических точек на защищенной площади поверхности.
2. Способ по п.1, в котором наблюдают за наземным движением подвижных объектов, представленных воздушными судами и обслуживающей техникой.
3. Способ по п.1, в котором в качестве параметров движения подвижных объектов используют их координаты местоположения, скорость движения и ускорение.
4. Способ по п.3, в котором координаты местоположения, скорость движения и ускорение подвижных объектов документируют, причем дополнительно фиксируют при взлете воздушного судна - время и координаты точки начала его разбега, динамику набора скорости движения, скорость и координаты точки отрыва, а при посадке - координаты точки касания, динамику снижения скорости движения.
5. Способ по п.1, в котором результаты отслеживания в режиме реального времени взаимного положения подвижных объектов и их положения относительно защищенной площади поверхности сопоставляют с регламентированными значениями и сигнализируют в случае их несоответствия.
6. Способ по п.1, в котором привязку координат характерных топографических точек в пределах установленной зоны аэродрома проводят путем создания вибраций или ударов вблизи этих точек и определения соответствующих каналов дальности когерентного оптического рефлектометра.
7. Способ по п.6, в котором в качестве характерных топографических точек в пределах установленной зоны аэродрома используют пороги взлетно-посадочных полос, границы взлетно-посадочных полос, места ожидания, линии "стоп", сходы с взлетно-посадочных полос, пересечения рулежных дорожек, границы пересечений, границы блоков переключаемых огней осевой линии, места парковки и углы строений.
8. Способ по п.2, в котором в процессе наблюдения за наземным движением подвижных объектов их идентифицируют по типам воздушных судов на основе алгоритмов распознавания спектров вибраций в известных режимах работы их двигателей, например, на малом газу, а обслуживающий техники - по частоте оборотов двигателя в характерных режимах, например, в режиме холостых оборотов.
9. Способ по п.8, в котором используют спектры вибраций в диапазоне частот звуковых и инфразвуковых колебаний.
10. Система наблюдения за наземным движением подвижных объектов в пределах установленной зоны аэродрома, включающая чувствительный волоконно-оптический кабель, подключенный к когерентному оптическому рефлектометру и расположенный в пределах установленной зоны аэродрома вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и/или обслуживающей техники, при этом расположение чувствительного волоконно-оптического кабеля в плане повторяет конфигурацию расположения взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники.
11. Система по п.10, в которой чувствительный волоконно-оптический кабель выполнен неразрывным и пересекает, по крайней мере, один раз взлетно-посадочную полосу и/или рулежную дорожку и/или место стоянки воздушных судов и/или обслуживающей техники.
12. Система по п.10, в которой чувствительный волоконно-оптический кабель помещен в грунт вблизи границ взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники.
13. Система по п.12, в которой чувствительный волоконно-оптический кабель помещен в грунт на глубину 0,1-1,0 м.
14. Система по п.10, в которой чувствительный волоконно-оптический кабель помещен непосредственно под бетонное покрытие взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники.
15. Система по п.10, в которой чувствительный волоконно-оптический кабель помещен непосредственно в тело бетонного покрытия взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники.
16. Система по п.14 или п.15, в которой чувствительный волоконно-оптический кабель расположен зигзагообразно вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники.
| Б.Г.Горшков и др | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |

