Область техники, к которой относится изобретение
Настоящее раскрытие относится к электроинструменту и, в частности, к электроинструменту, включающему в себя трехфазный бесщеточный двигатель.
Предшествующий уровень техники
В патенте JP 2003-200363 А раскрыт электроинструмент. Электроинструмент включает в себя трехфазный бесщеточный двигатель и управляющее устройство двигателя, который приводит в действие трехфазный бесщеточный двигатель.
Сущность изобретения
Техническая проблема
Электроинструмент используется для различных видов работ и от него требуется выполнение операций в соответствии с выполняемой работой. Например, в случае циркулярной электропилы, ее режущий инструмент (полотно) должен приводиться в действие с высокой скоростью для резки тонкой пластины, и должен приводиться в действие с высоким крутящим моментом для резки толстой пластины. К сожалению, эти операции противоречат друг другу, и, следовательно, одновременное достижение обеих целей не может быть легко достигнуто.
Технология, раскрытая в настоящем документе, решает эту проблему. Другими словами, раскрыта технология, способная сбалансировать различные характерные особенности электроинструмента.
Решение технической проблемы
В традиционном электроинструменте, угол проводимости трехфазного бесщеточного двигателя устанавливается на 120 градусов. Однако согласно настоящей технологии, угол проводимости трехфазного бесщеточного двигателя устанавливается на угол больше или равный 130 градусам, но не больше 180 градусов. Увеличение угла проводимости уменьшает выходной крутящий момент двигателя и увеличивает угловую скорость двигателя за единицу времени (далее в настоящем документе, называемую просто «угловой скоростью»). Следовательно, может быть реализован электроинструмент с высокооборотными характеристиками. Объединение этого электроинструмента с традиционным электроинструментом, имеющим угол проводимости 120 градусов, позволяет использовать его различные характерные особенности в соответствии с выполняемой работой.
На основе этих данных, является предпочтительным, чтобы электроинструмент имел трехфазный бесщеточный двигатель, который приводит в действие режущий инструмент и управляющее устройство двигателя, которое приводит в действие трехфазный бесщеточный двигатель при помощи сигналов напряжения прямоугольной формы. Также является предпочтительным, чтобы управляющее устройство двигателя было способно настраивать угол проводимости на угол больше или равный 130 градусам, но не больше 180 градусов.
В вышеописанном электроинструменте, угол проводимости может быть зафиксирован на значении, больше или равном 130 градусам, но не больше 180 градусов. Также является предпочтительным, чтобы управляющее устройство двигателя было способно изменять угол проводимости трехфазного бесщеточного двигателя, по меньшей мере, между двумя значениями от 120 градусов до 180 градусов. В соответствии с этим вариантом осуществления, в одном электроинструменте могут быть достигнуты различные характерные особенности.
Краткое описание чертежей
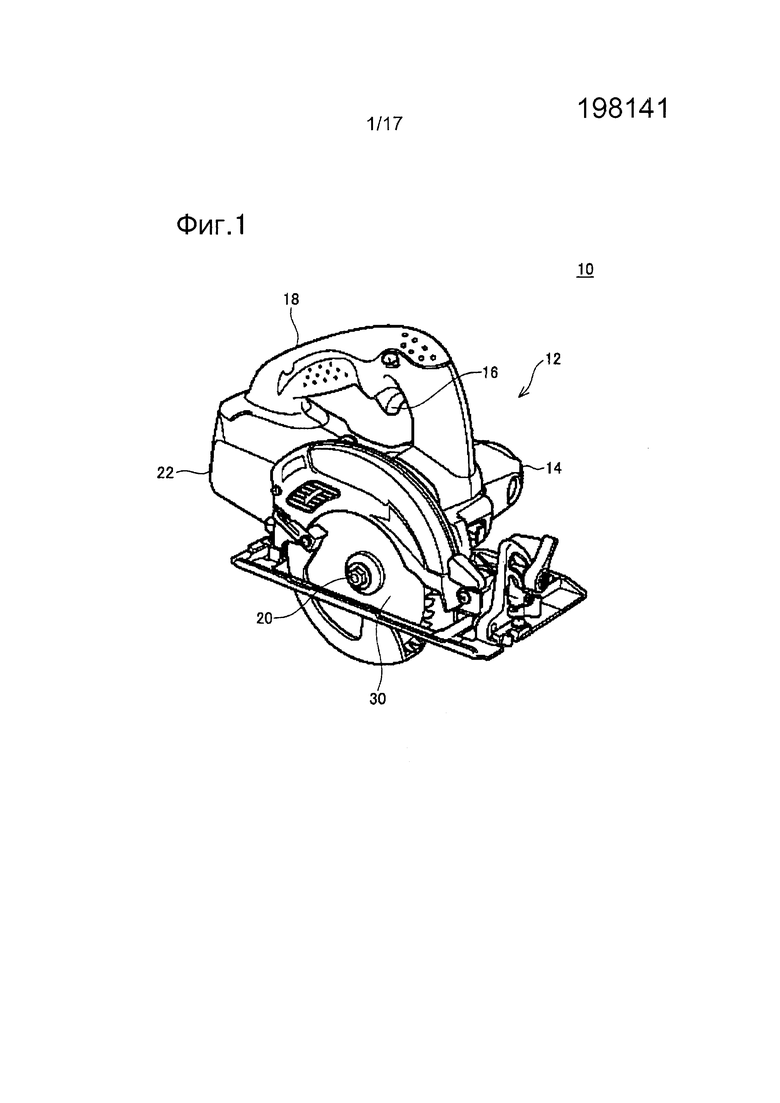
Фиг. 1 иллюстрирует внешний вид циркулярной пилы в соответствии с первым вариантом осуществления.
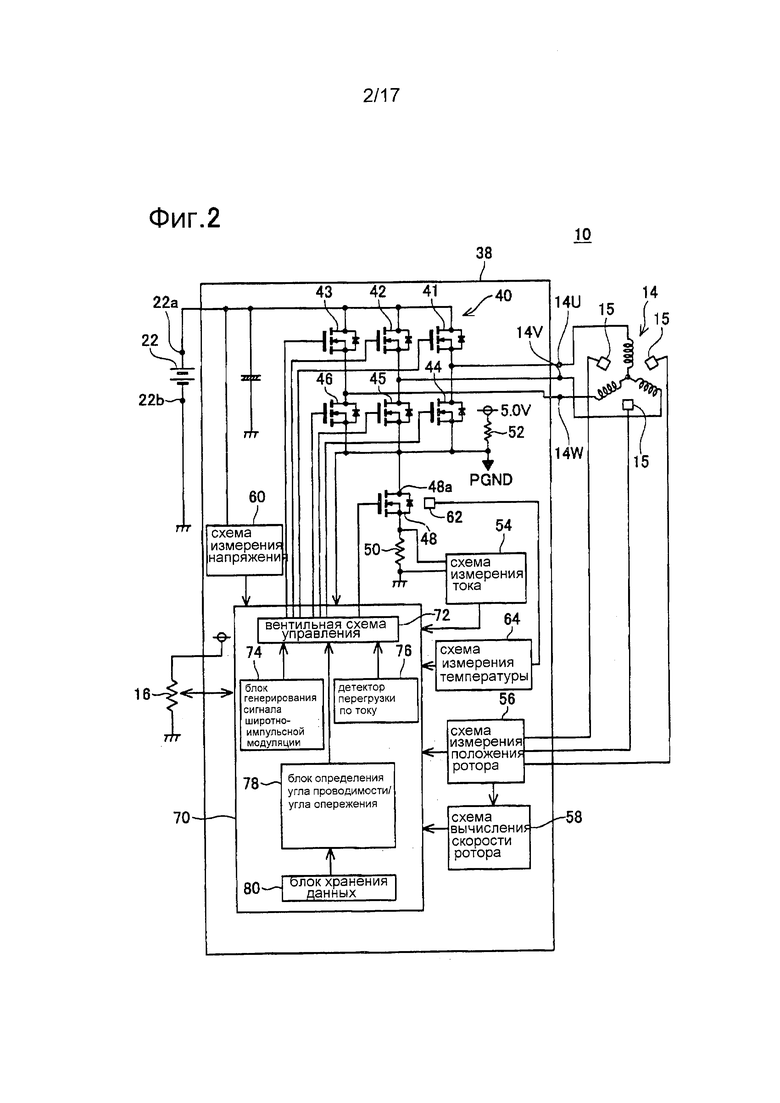
Фиг. 2 иллюстрирует электрическую схему, изображающую электрическую структуру циркулярной пилы в соответствии с первым вариантом осуществления.
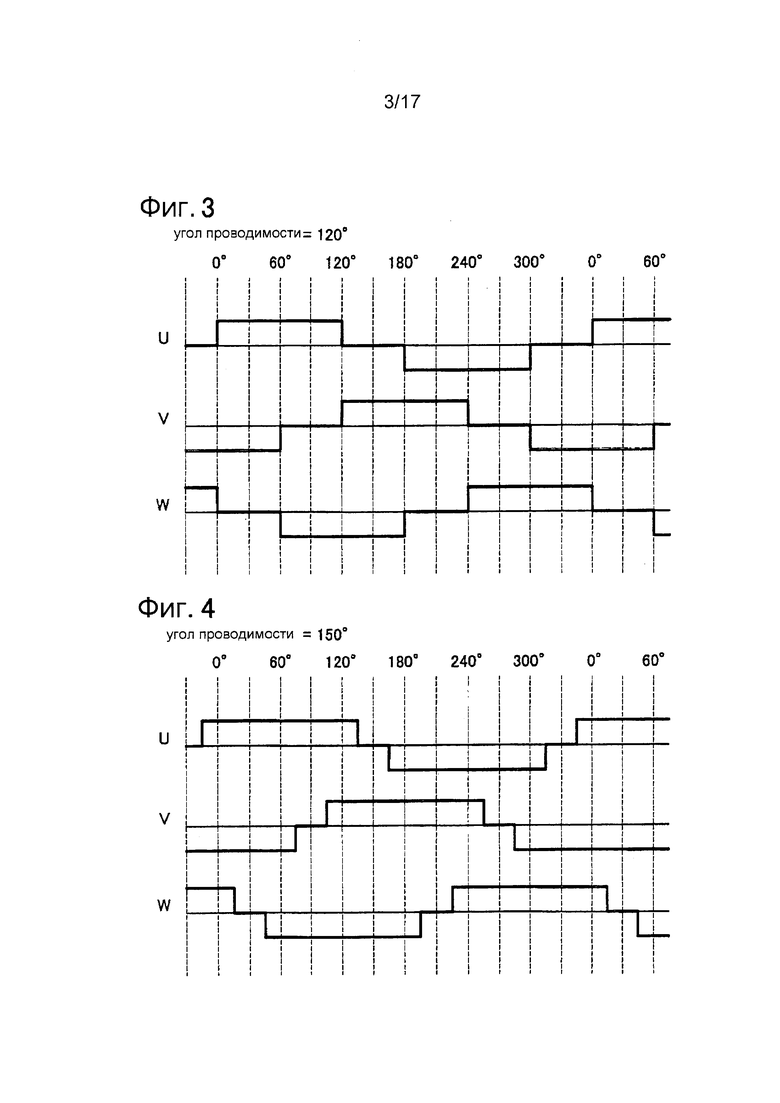
Фиг. 3 иллюстрирует диаграмму, изображающую форму сигнала напряжения каждой фазной клеммы, полученного, если угол проводимости равен 120 градусов.
Фиг. 4 иллюстрирует диаграмму, изображающую форму сигнала напряжения каждой фазной клеммы, полученного, если угол проводимости равен 150 градусов.
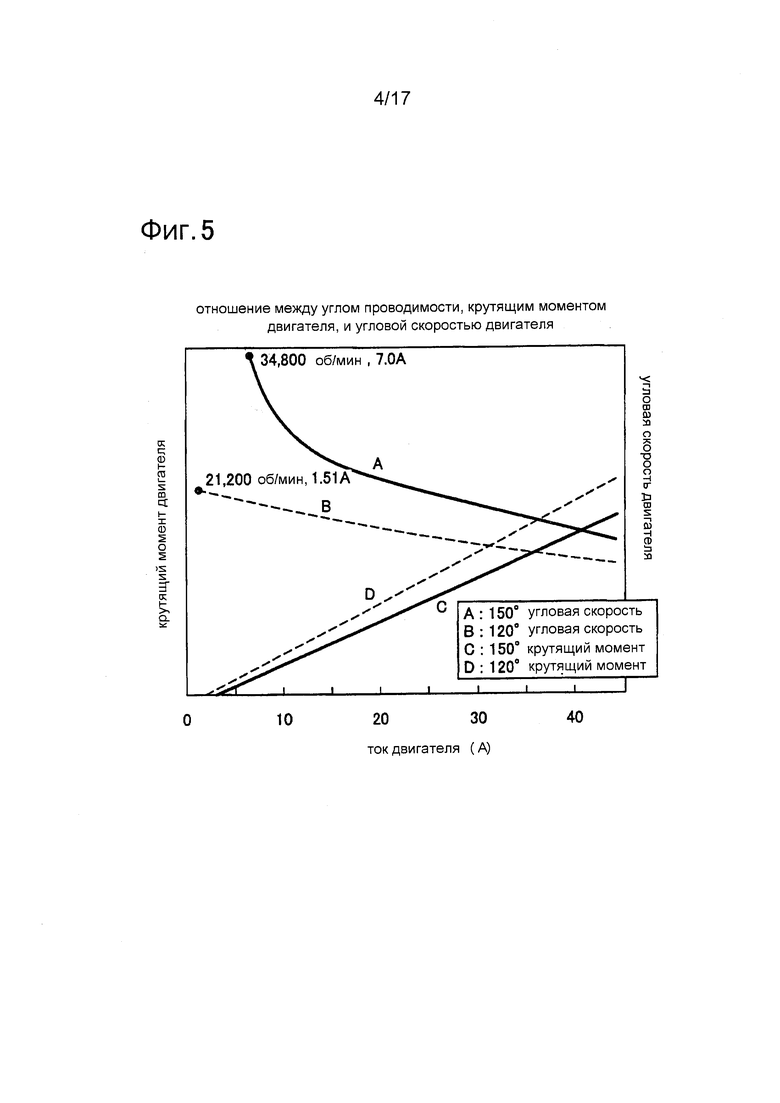
Фиг. 5 иллюстрирует график, изображающий соотношение между углом проводимости, крутящим моментом двигателя и угловой скоростью двигателя, на котором линия А представляет угловую скорость двигателя, получаемую, если угол проводимости равен 150 градусов, линия В представляет угловую скорость двигателя, получаемую, если угол проводимости равен 120 градусов, линия С представляет крутящий момент двигателя, получаемый, если угол проводимости равен 150 градусов, а линия D представляет крутящий момент двигателя, получаемый, если угол проводимости равен 120 градусов.
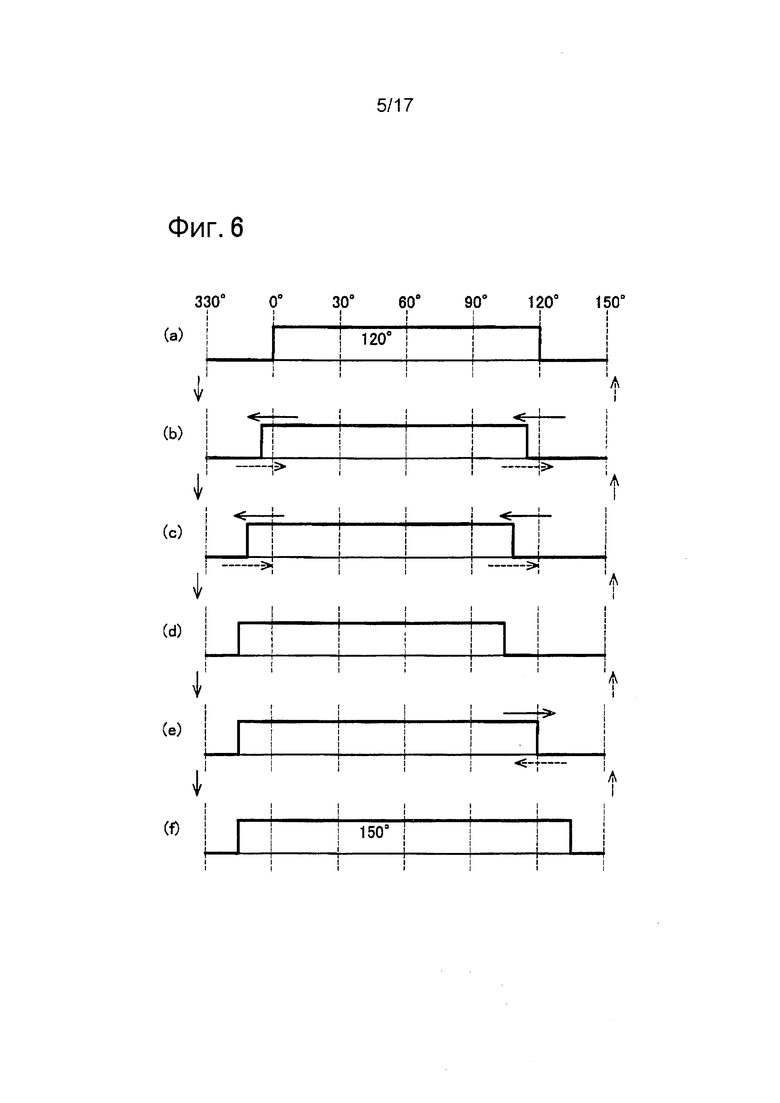
Фиг. 6 иллюстрирует диаграмму, изображающую, процесс постепенного изменения угла проводимости от 120 градусов до 150 градусов.
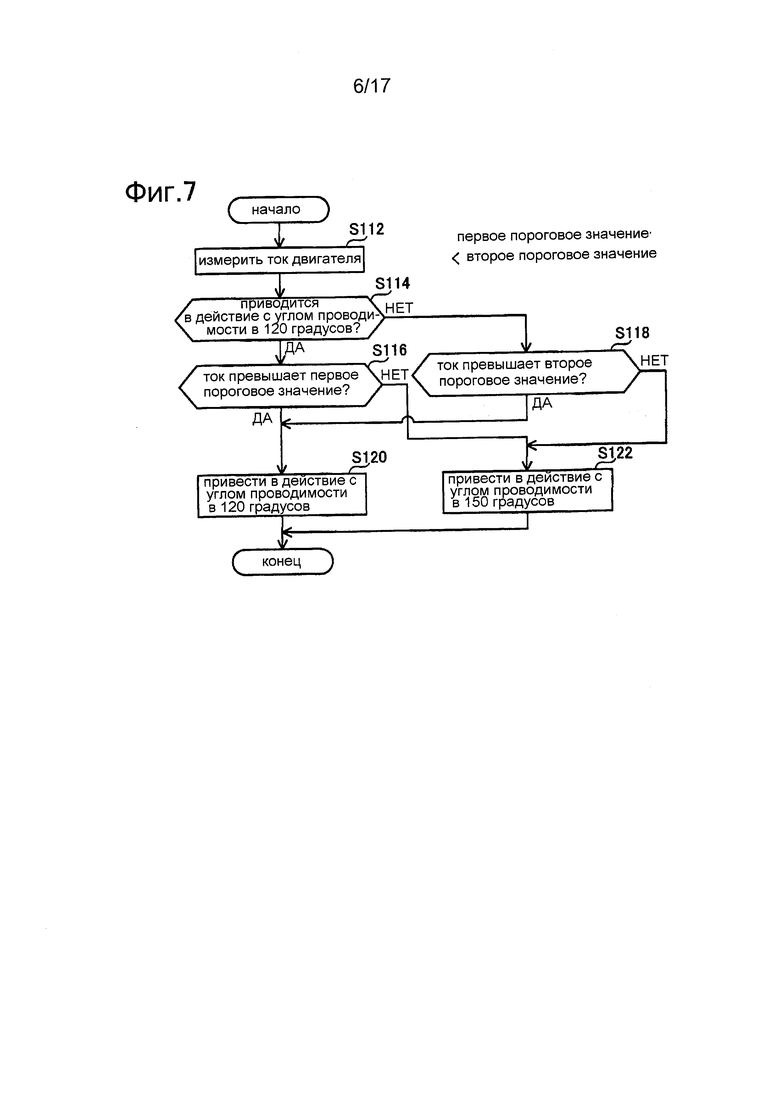
Фиг. 7 иллюстрирует схему последовательности операций, изображающую процесс определения угла проводимости на основе значения тока двигателя.
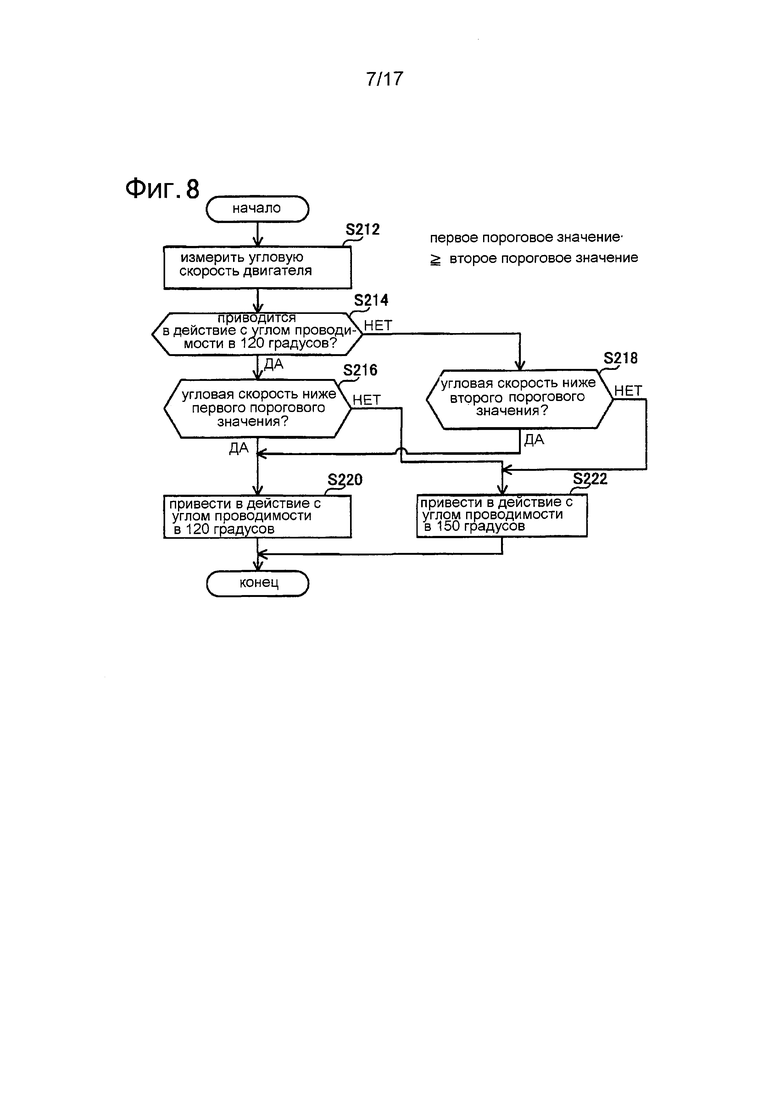
Фиг. 8 иллюстрирует схему последовательности операций, изображающую процесс определения угла проводимости на основе угловой скорости двигателя.
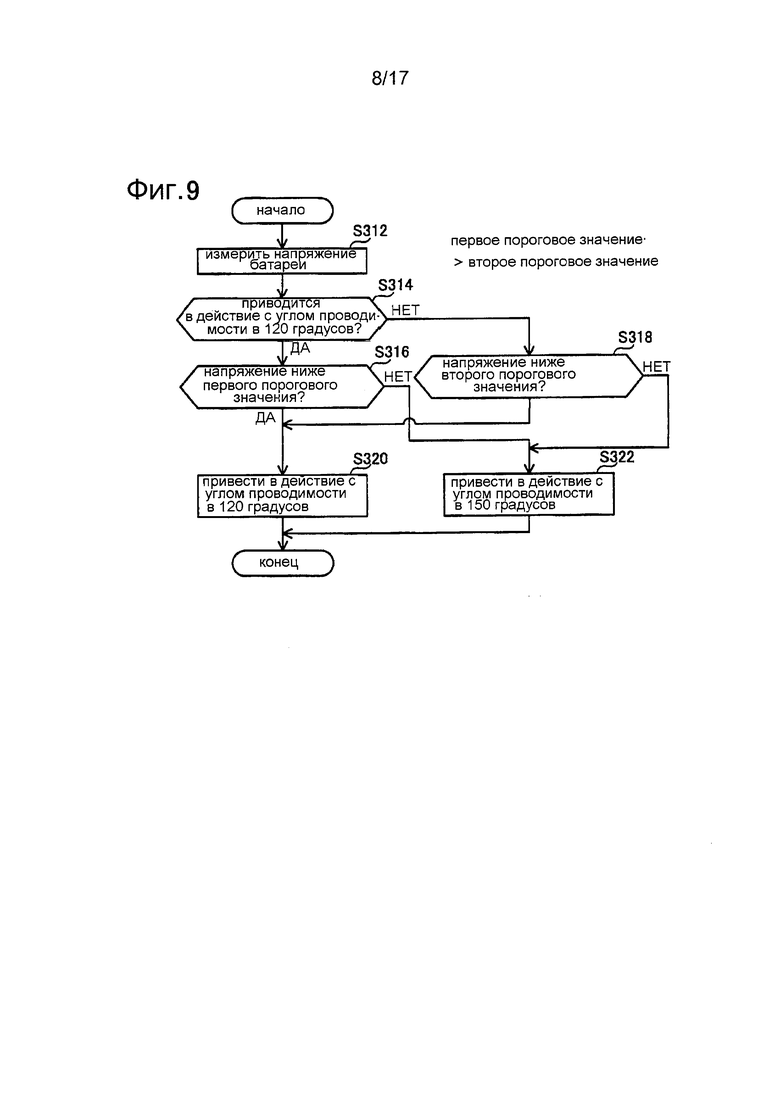
Фиг. 9 иллюстрирует схему последовательности операций, изображающую процесс определения угла проводимости на основе значения напряжения аккумуляторной батареи.
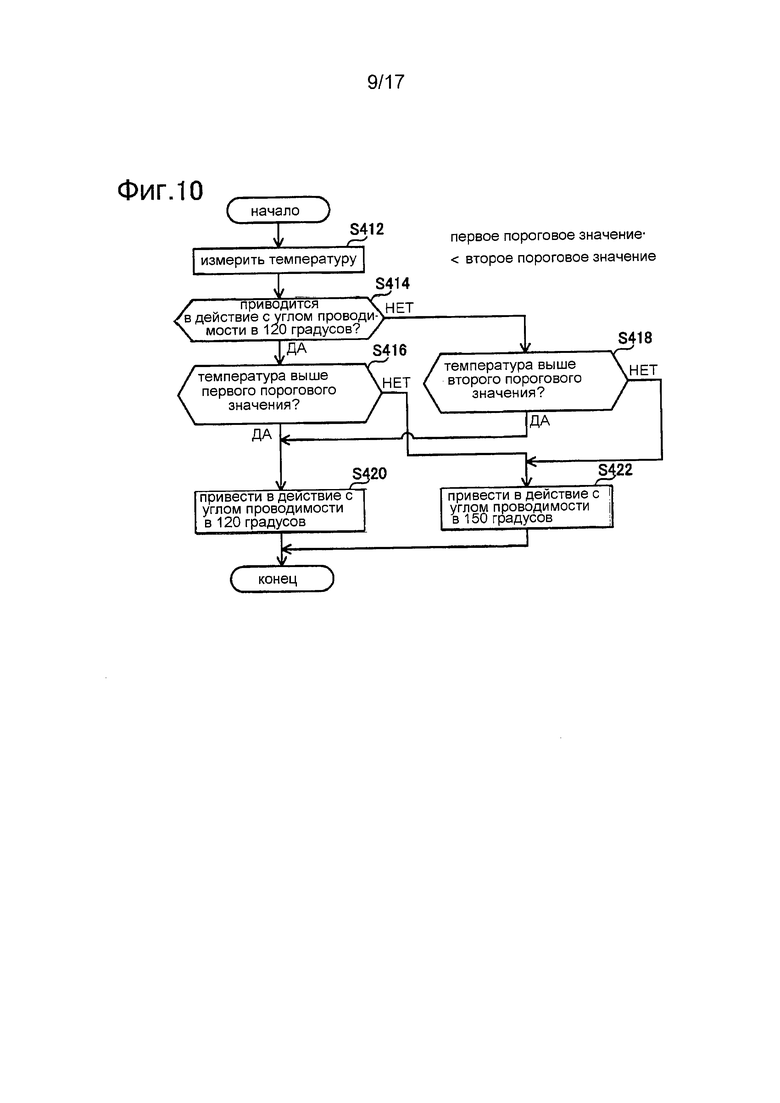
Фиг. 10 иллюстрирует схему последовательности операций, изображающую процесс определения угла проводимости на основе температуры автоматического выключателя.
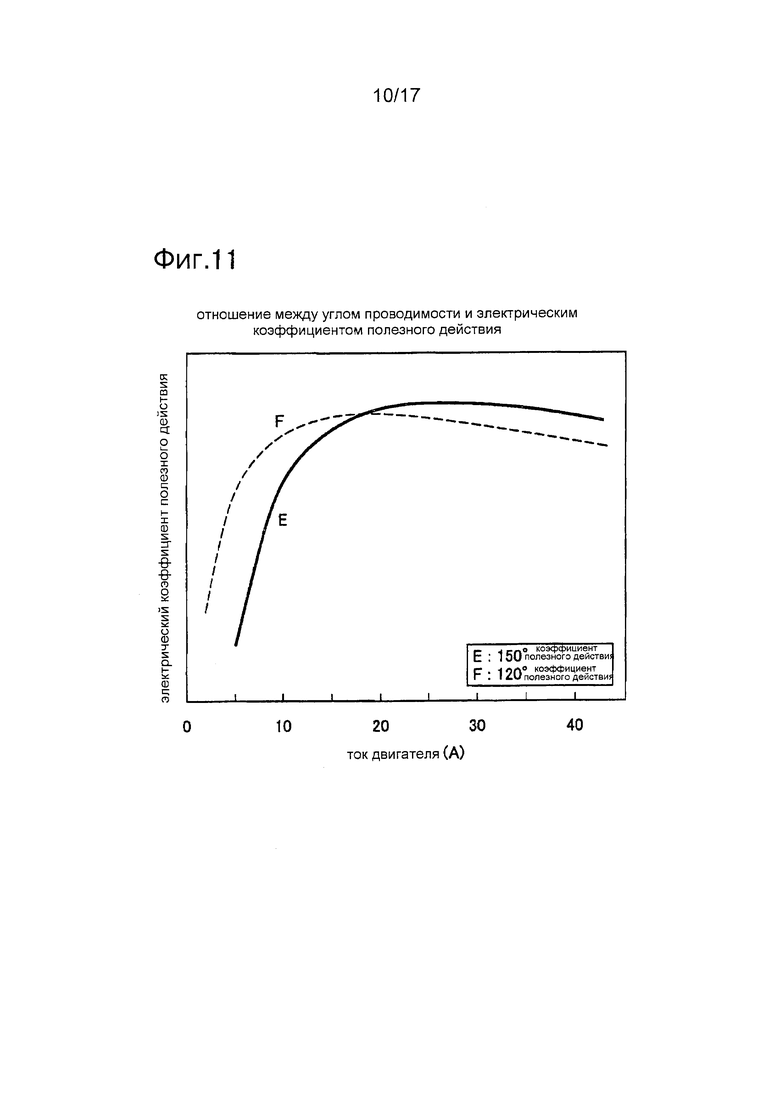
Фиг. 11 иллюстрирует график, изображающий соотношение между углом проводимости и электрическим коэффициентом полезного действия, на котором линия Е представляет электрический коэффициент полезного действия, получаемый, если угол проводимости равен 150 градусов, а линия F представляет электрический коэффициент полезного действия, получаемый, если угол проводимости равен 120 градусов.
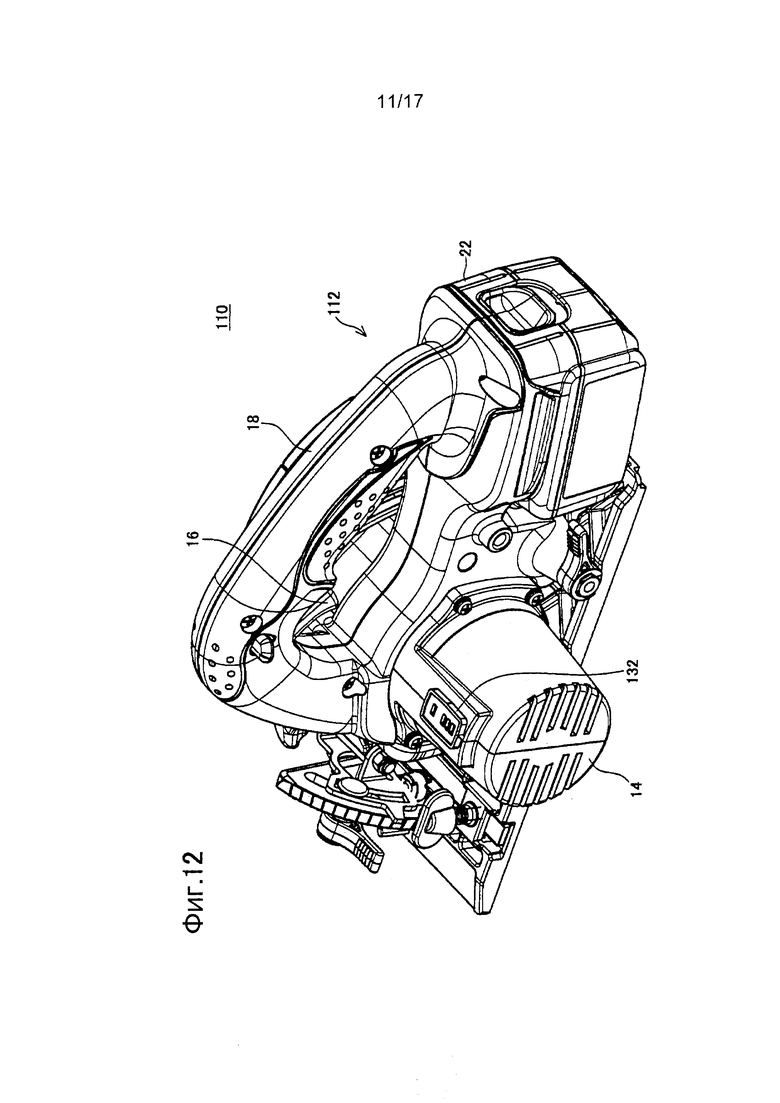
Фиг. 12 иллюстрирует внешний вид циркулярной пилы в перспективе, в соответствии со вторым вариантом осуществления.
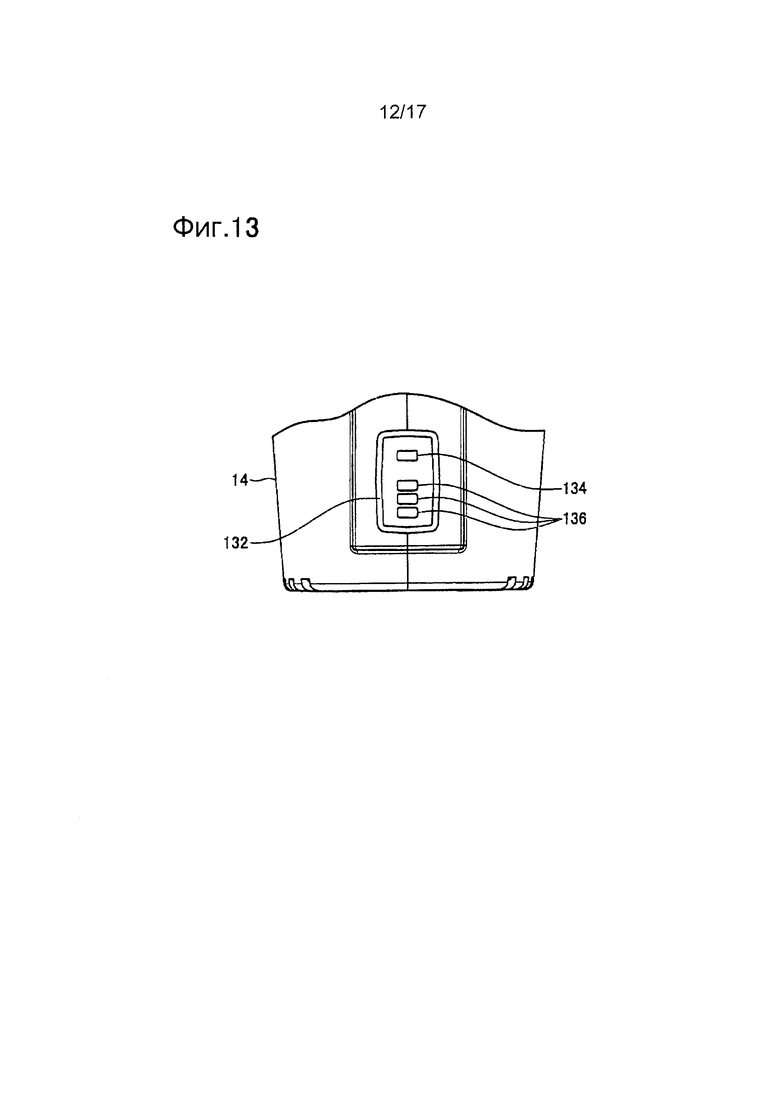
Фиг. 13 иллюстрирует горизонтальную проекцию, изображающую блок индикации.
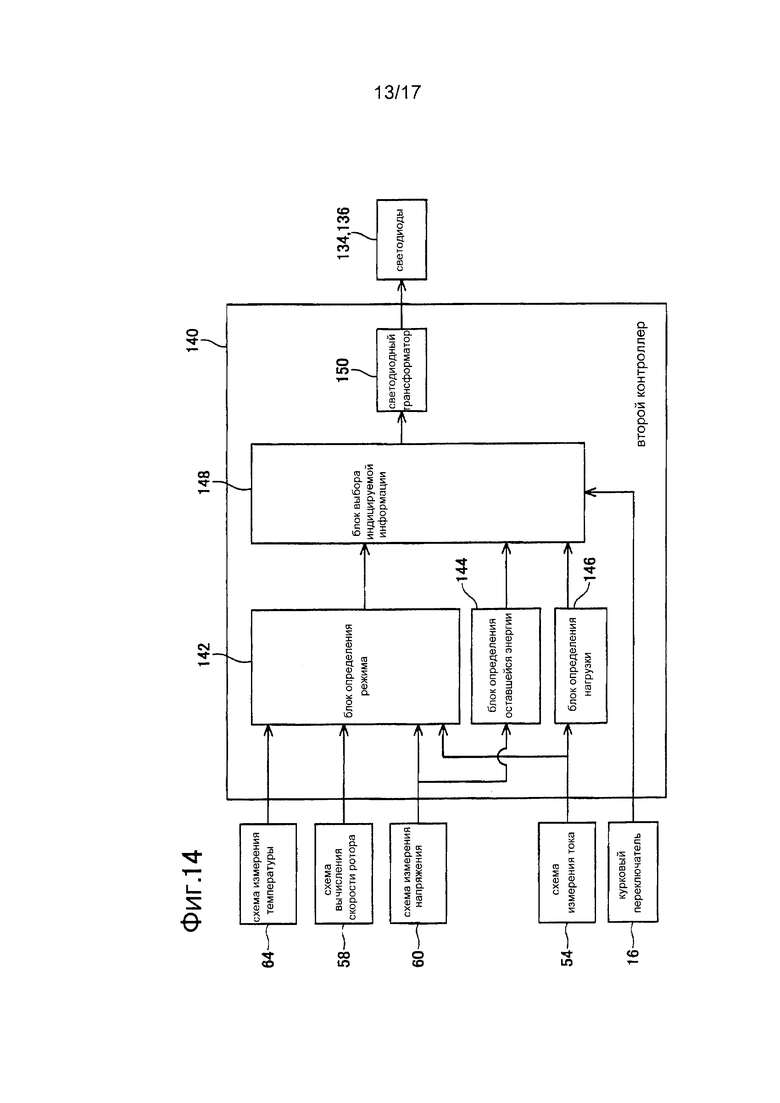
Фиг. 14 иллюстрирует блок-схему, изображающую функциональную конфигурацию циркулярной пилы в соответствии со вторым вариантом осуществления.
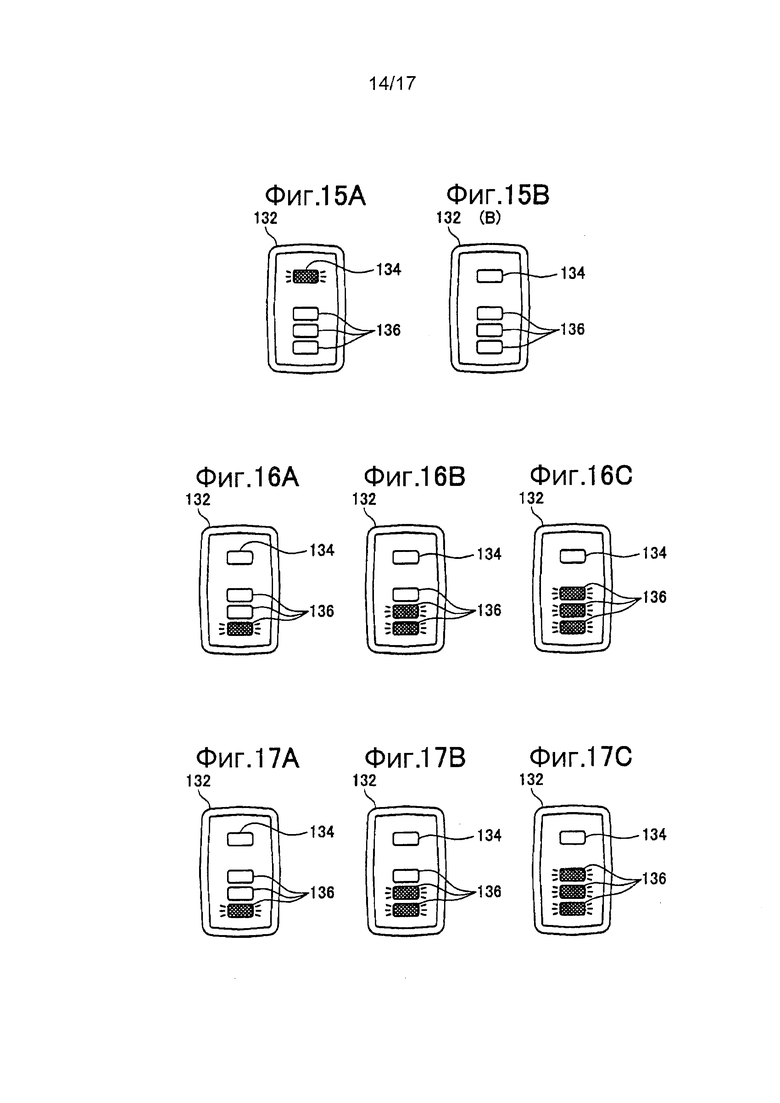
Фиг. 15А и 15В изображают пример того, как угол проводимости трехфазного бесщеточного двигателя указывается посредством блока индикации, причем Фиг. 15А изображает блок индикации, когда угол проводимости равен 150 градусов, а Фиг. 15В изображает блок индикации, когда угол проводимости равен 120 градусов.
Фиг. 16А-16С изображают пример того, как нагрузка, прилагаемая к режущему инструменту, указывается посредством блока индикации, причем нагрузка, указываемая посредством блока индикации, постепенно увеличивается от состояния, изображенного на Фиг. 16А, до состояния, изображенного на Фиг. 16С.
Фиг. 17А-17С изображают пример того, как оставшаяся энергия (уровень заряда) аккумуляторной батареи указывается посредством блока индикации, причем оставшаяся энергия, указываемая посредством блока индикации, постепенно увеличивается от состояния, изображенного на Фиг. 17А, до состояния, изображенного на Фиг. 17С.
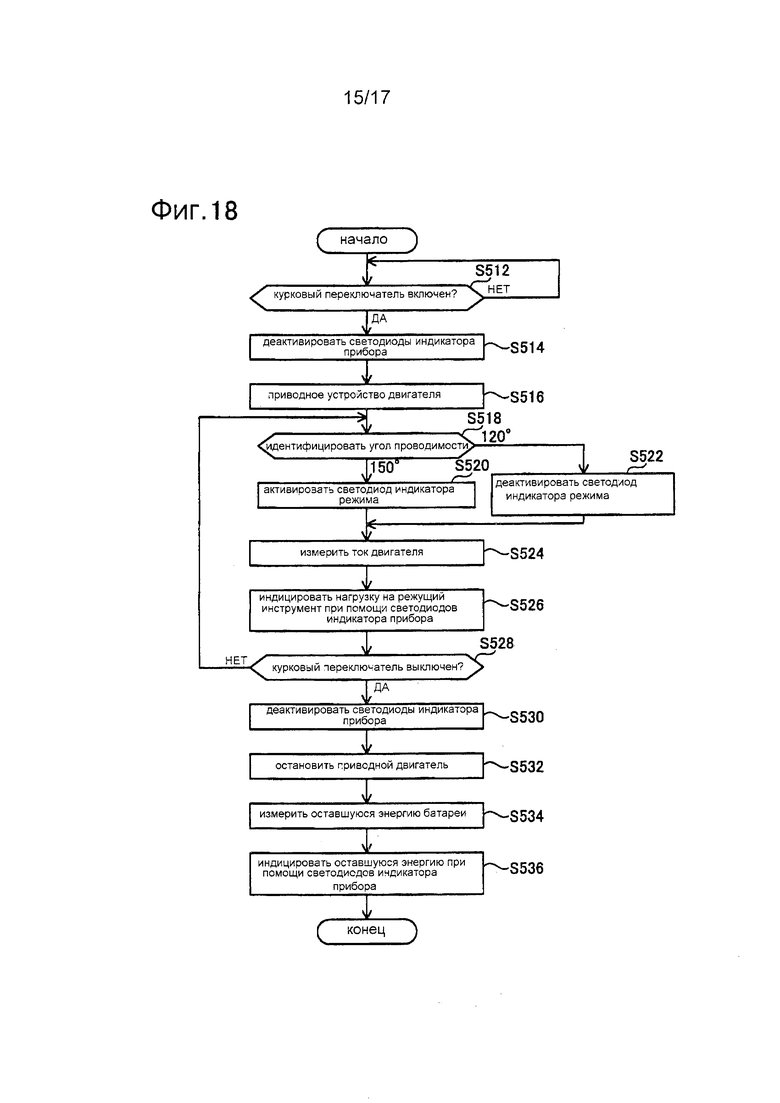
Фиг. 18 иллюстрирует схему последовательности операций для объяснения последовательности операций блока индикации.
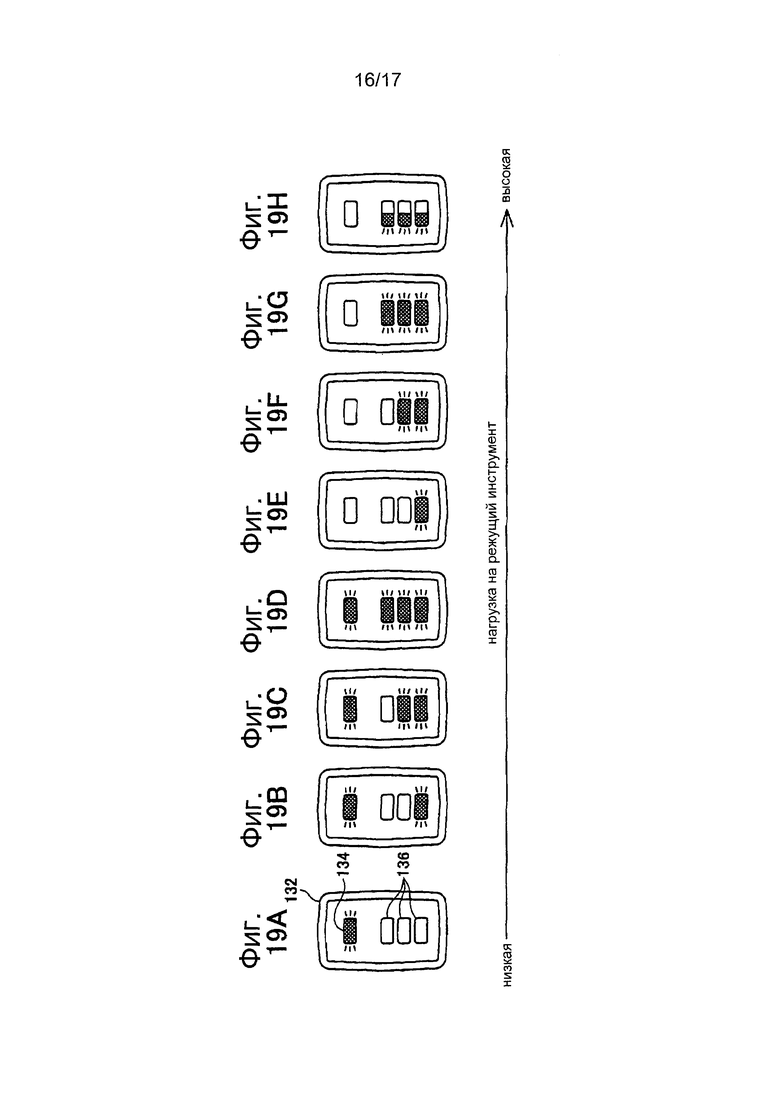
Фиг. 19А-19Н изображают другой пример того, как нагрузка, прикладываемая к режущему инструменту, указывается посредством блока индикации, причем нагрузка, указываемая посредством блока индикации, постепенно увеличивается от состояния, изображенного на Фиг. 19А, до состояния, изображенного на Фиг. 19Н.
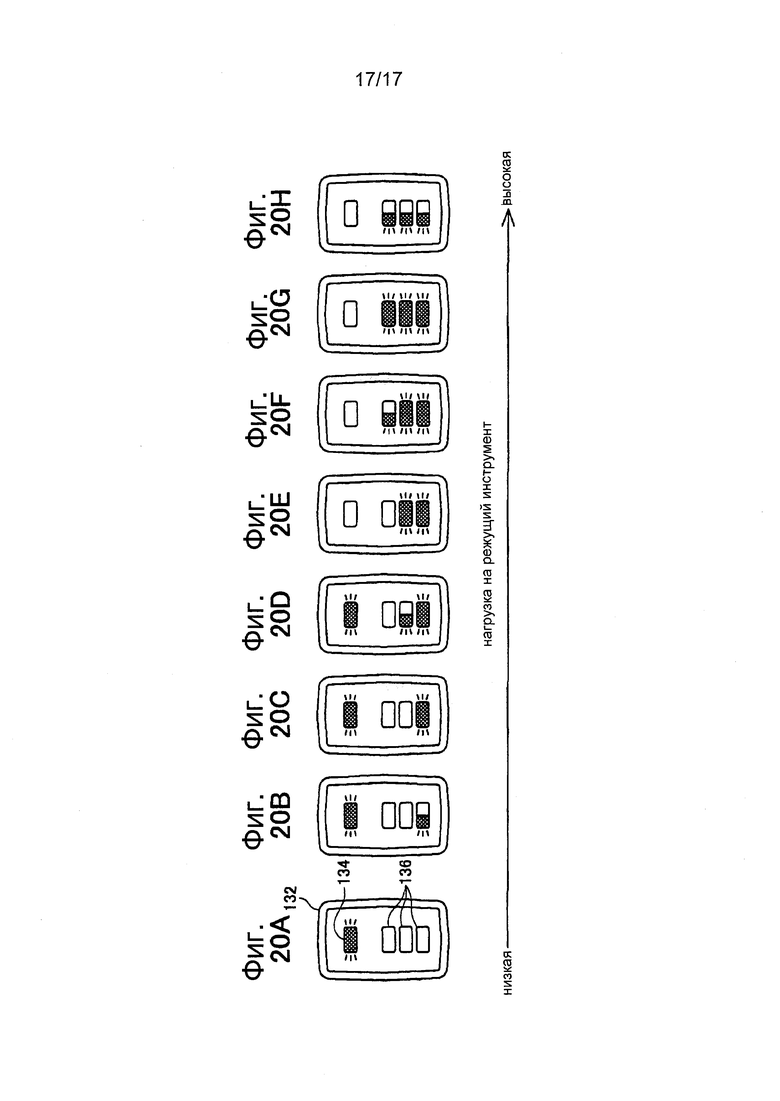
Фиг. 20A-20Н изображает другой пример того, как нагрузка, прикладываемая к режущему инструменту, указывается посредством блока индикации, причем нагрузка, указываемая посредством блока индикации, постепенно увеличивается от состояния, изображенного на Фиг. 20А, до состояния, изображенного на Фиг. 20Н.
Варианты осуществления изобретения
В варианте осуществления настоящего изобретения является предпочтительным, чтобы управляющее устройство двигателя приводило в действие трехфазный бесщеточный двигатель при помощи сигналов напряжения прямоугольной формы с углом проводимости, установленным на значение, которое больше или равно 130 градусов, но не больше 180 градусов. В соответствии с этой конфигурацией, режущий инструмент может быть приведен в действие с более высокой скоростью, чем традиционный электроинструмент с углом проводимости, установленным на 120 градусов.
В другом варианте осуществления настоящего изобретения является предпочтительным, чтобы управляющее устройство двигателя изменяло угол проводимости, по меньшей мере, между двумя значениями, которые больше или равны 120 градусов, но не больше 180 градусов. В соответствии с этой конфигурацией, режущий инструмент может быть приведен в действие с высокой скоростью посредством увеличения угла проводимости, и режущий инструмент может быть приведен в действие с высоким крутящим моментом посредством уменьшения угла проводимости.
В вышеописанном аспекте, угол проводимости может быть изменен вручную пользователем или автоматически посредством электроинструмента. В последнем случае является предпочтительным, чтобы угол проводимости изменялся в соответствии с нагрузкой, прикладываемой к режущему инструменту. Как правило, в случае изменения угла проводимости в соответствии с нагрузкой, прикладываемой к режущему инструменту, предпочтительно, могут быть выбраны следующие два способа.
В первом способе, чем ниже нагрузка, прикладываемая к режущему инструменту, тем больше значение, на которое установлен угол проводимости. Угловая скорость двигателя увеличивается по мере уменьшения выходного крутящего момента двигателя. Следовательно, если электроинструмент используется для работы в легком режиме, и к режущему инструменту прикладывается низкая нагрузка, то является предпочтительным, чтобы угол проводимости был увеличен таким образом, чтобы электроинструмент мог эксплуатироваться, предпочтительно, с угловой скоростью двигателя. С другой стороны, если электроинструмент используется в работе в тяжелом режиме, и к режущему инструменту прикладывается большая нагрузка, то является предпочтительным, чтобы угол проводимости был уменьшен таким образом, чтобы электроинструмент мог эксплуатироваться, предпочтительно, с выходным крутящим моментом двигателя.
Во втором способе, чем больше нагрузка, прикладываемая к режущему инструменту, тем больше значение, при котором устанавливается угол проводимости. В соответствии с проверкой, выполненной изобретателями, если к режущему инструменту прикладывается малая нагрузка, то установка угла проводимости на большое значение может улучшить электрический коэффициент полезного действия электроинструмента. Если к режущему инструменту прикладывается большая нагрузка, то установка угла проводимости на малое значение может улучшить электрический коэффициент полезного действия электроинструмента. Следовательно, второй способ обеспечивает энергосберегающую эксплуатацию, при которой в первую очередь принимается во внимание электрический коэффициент полезного действия электроинструмента.
В соответствии с одним аспектом настоящего изобретения, управляющее устройство двигателя способно выполнять выбор между этими двумя режимами. Другими словами, управляющее устройство двигателя может быть сконфигурировано для выполнения выбора между «режимом высокой мощности, где угол проводимости устанавливается на большее значение по мере уменьшения нагрузки, прикладываемой к режущему инструменту» и «режимом энергосбережения, где угол проводимости устанавливается на большее значение по мере увеличения нагрузки, прикладываемой к режущему инструменту». В этом случае, управляющее устройство двигателя может выполнять выбор из этих двух режимов в соответствии с уровнем заряда (оставшейся энергии) аккумулятора, подающего электроэнергию на двигатель. Другими словами, является предпочтительным, чтобы двигатель эксплуатировался в «режиме высокой мощности», в случае достаточного заряда аккумулятора, и чтобы двигатель эксплуатировался в «режиме энергосбережения», в случае падения уровня заряда аккумулятора до предварительно определенного уровня.
В соответствии с одним аспектом настоящей технологии, является предпочтительным, чтобы электроинструмент дополнительно имел первый детектор, который измеряет показатель, соответствующий нагрузке, прикладываемой к режущему инструменту. В этом случае, управляющее устройство двигателя, предпочтительно, изменяет угол проводимости в соответствии со значением, измеренным посредством первого детектора. Примеры показателя, соответствующего нагрузке, прикладываемой к режущему инструменту, включают в себя ток двигателя, угловую скорость двигателя, ток аккумулятора и напряжение аккумулятора. Как уже хорошо известно, в трехфазном бесщеточном двигателе, чем больше нагрузка, прикладываемая двигателю, тем больше ток двигателя и ниже угловая скорость двигателя. В этот момент, ток аккумулятора увеличивается в ответ на ток двигателя, а напряжение аккумулятора уменьшается по мере увеличения тока аккумулятора. Кроме того, искажение, которое формируется на режущем инструменте или вращательной оси, соединенной с инструментом, может являться показателем, соответствующим нагрузке, прикладываемой к режущему инструменту.
В вышеописанном аспекте является предпочтительным, чтобы управляющее устройство двигателя было способно изменять угол проводимости, по меньшей мере, между первым углом и вторым углом, сохранять первое пороговое значение и второе пороговое значения показателя, изменять угол проводимости на второй угол, в соответствии с соотношением между значением, измеренным посредством первого детектора, и первым пороговым значением, если угол проводимости установлен на первый угол, и изменять угол проводимости на первый угол, в соответствии с соотношением между значением, измеренным посредством первого детектора, и вторым пороговым значением, если угол проводимости установлен на второй угол. Другими словами, предпочтительно применение различных пороговых значений для определения того, требуется ли изменение угла проводимости с первого угла на второй угол, и требуется ли изменение угла проводимости со второго угла на первый угол. В результате, процесс изменения угла проводимости может быть обеспечен гистерезисными характеристиками, и может быть предотвращено излишнее многократное изменение угла проводимости, если измеренный индекс колеблется точно около пороговых значений.
В одном аспекте настоящей технологии является предпочтительным, чтобы в электроинструменте дополнительно имелся второй детектор, который измеряет температуру трехфазного бесщеточного двигателя или управляющего устройства двигателя. В этом случае является предпочтительным, чтобы управляющее устройство двигателя изменяло угол проводимости в соответствии со значением, измеренным посредством второго детектора. Ток, текущий через двигатель, увеличивается по мере увеличения угла проводимости, что приводит к увеличению температуры двигателя и управляющего устройства двигателя. Поэтому, отслеживание температуры двигателя или управляющего устройства двигателя и изменение угла проводимости на основе этой температуры может предотвратить перегрев двигателя и управляющего устройства двигателя. Например, угол проводимости может быть уменьшен, если температура двигателя или управляющего устройства двигателя отклоняется от приемлемого диапазона.
В вышеописанном аспекте является предпочтительным, чтобы управляющее устройство двигателя было способно изменять угол проводимости, по меньшей мере, между первым углом и вторым углом, сохранять третье пороговое значение и четвертое пороговое значения температуры, изменять угол проводимости на второй угол, если значение, измеренное посредством второго детектора, выше третьего порогового значения, если угол проводимости был установлен на первое значение, и изменять угол проводимости на первый угол, если значение, измеренное посредством второго детектора, ниже четвертого порогового значения, если угол проводимости был установлен на второе значение. Другими словами, является предпочтительным применение различных пороговых значений для определения того, требуется ли изменение угла проводимости с первого угла на второй угол, и требуется ли изменение угла проводимости со второго угла на первый угол. В результате, для процесса изменения угла проводимости могут быть обеспечены гистерезисные характеристики, и можно предотвратить излишнее многократное изменение угла проводимости, если измеренный показатель колеблется точно около пороговых значений.
В одном аспекте настоящей технологии, если управляющее устройство двигателя делает угол проводимости большим, то является предпочтительным, чтобы управляющее устройство двигателя выполняло вначале перенос момента начала проводимости на более ранний момент времени при сохранении значения угла проводимости, а затем выполняло увеличение угла проводимости при сохранении момента времени его начала. В соответствии с этим способом, можно существенно воспрепятствовать колебанию угловой скорости двигателя, если управляющее устройство двигателя увеличивает угол проводимости.
В одном аспекте настоящего изобретения, если управляющее устройство двигателя делает угол проводимости меньше, то является предпочтительным, чтобы управляющее устройство двигателя выполняло вначале указанное уменьшение, при сохранении момента времени начала проводимости, а затем выполняло перенос момента начала угла проводимости на более поздний момент времени, при сохранении значения угла проводимости.
В одном аспекте настоящей технологии является предпочтительным, чтобы управляющее устройство двигателя изменяло угол опережения переключения фаз в соответствии с изменением угла проводимости. Причина состоит в том, что угол опережения, предназначенный для достижения высокого коэффициента полезного действия и высокой мощности, изменяется в зависимости от угла проводимости. Является предпочтительным, чтобы определенное значение угла опережения относительно каждого угла проводимости было должным образом установлено в соответствии со структурой, функциями и характеристиками требований электроинструмента.
В одном аспекте настоящей технологии, полупроводниковый транзистор типа AIIIBV может быть использован в качестве переключающего элемента управляющего устройства двигателя. Вследствие выдерживаемого им высокого напряжения в выключенном состоянии и низкого сопротивления во включенном состоянии, полупроводниковый транзистор типа AIIIBV подходит для электроинструмента, в котором к его двигателю прикладывается большой ток.
В одном аспекте настоящей технологии является предпочтительным, чтобы электроинструмент дополнительно имел блок уведомления, который выборочно выполняет операцию уведомления, соответствующую углу проводимости, установленному посредством управляющего устройства двигателя. В соответствии с этой конфигурацией, пользователь может знать, при каком угле проводимости приведен в действие трехфазный бесщеточный двигатель электроинструмента. Тогда, пользователь может эффективно выполнять задачу посредством регулирования нагрузки, прикладываемой к режущему инструменту, при этом продолжая приведение в действие трехфазного бесщеточного двигателя с желательным углом проводимости.
В вышеописанном аспекте, является предпочтительным, чтобы блок уведомления уникально идентифицировал угол проводимости, установленный посредством управляющего устройства двигателя, независимо от угла проводимости, который фактически установлен. В этой конфигурации, угол проводимости, который фактически установлен посредством управляющего устройства двигателя, как правило, должен соответствовать углу проводимости, сообщенному посредством блока уведомления. Однако если в приводном двигателе или в блоке уведомления имеется неисправность, то угол проводимости, который фактически установлен посредством управляющего устройства двигателя, не соответствует углу проводимости, сообщенному посредством блока уведомления. Следовательно, если углы проводимости не совпадают, то может быть определено, что в приводном двигателе или блоке уведомления имеется неисправность. Соответственно, пользователь может немедленно остановить использование электроинструмента и быстро отремонтировать неисправность.
В вышеописанном аспекте является предпочтительным, чтобы электроинструмент дополнительно имел первый детектор, который измеряет показатель, соответствующий нагрузке, прикладываемой к режущему инструменту. В этом случае, является предпочтительным, чтобы управляющее устройство двигателя изменяло угол проводимости в соответствии со значением, измеренным посредством первого детектора, и чтобы блок уведомления выбирал выполнение операции уведомления в соответствии со значением, измеренным посредством первого детектора. Например, для значения, измеренного посредством первого детектора, как управляющее устройство двигателя, так и блок уведомления могут хранить, по меньшей мере, одно пороговое значение. Управляющее устройство двигателя может изменять угол проводимости на основе соотношения величины между значением, измеренным посредством первого детектора, и сохраненного порогового значения. В этом случае является предпочтительным, чтобы блок уведомления выполнял операцию уведомления, соответствующую углу проводимости, который будет установлен посредством управляющего устройства двигателя, независимо от управляющего устройства двигателя на основе соотношения величин между значением, измеренным посредством первого детектора, и сохраненного порогового значения. В этой конфигурации, операции управляющего устройства двигателя и блока уведомления определяются независимо, на основе результата измерения, полученного посредством общего детектора. Следовательно, если обе операции не соответствуют друг другу, то пользователь может определить, что либо в приводном двигателе, либо в блоке уведомления имеется неисправность.
В каждом из аспектов, где электроинструмент имеет блок уведомления, как было описано выше, является предпочтительным, чтобы электроинструмент дополнительно имел аккумулятор, который подает электроэнергию на трехфазный бесщеточный двигатель, и третий детектор, который измеряет оставшуюся энергию аккумулятора. В этом случае, является предпочтительным, чтобы блок уведомления был способен дополнительно выполнять операции уведомления, соответствующие оставшейся энергии аккумулятора, измеренной посредством третьего детектора. Поскольку пользователь может знать величину оставшейся энергии аккумулятора, то пользователь может предотвратить внезапное истощение аккумулятора.
В одном аспекте настоящей технологии является предпочтительным, чтобы блок уведомления выполнял операцию уведомления, соответствующую выбранному углу проводимости, в процессе приведения в действие двигателя, и выполнял операцию уведомления, соответствующую оставшейся энергии аккумулятора, в случае остановки приведенного в действие двигателя. Эта конфигурация может предотвратить неправильное понимание пользователем информации, сообщенной посредством блока уведомления. Кроме того является предпочтительным, чтобы блок уведомления дополнительно выполнял операцию уведомления, указывающую величину нагрузки, прикладываемой к режущему инструменту в процессе приведения в действие двигателя.
В одном аспекте настоящей технологии является предпочтительным, чтобы блок уведомления имел, по меньшей мере, один источник света. Следовательно, пользователь может визуально распознавать информацию, указанную посредством блока уведомления. Отметим, что блок уведомления может являться таким устройством, как источник звука, источник вибрации или жидкокристаллическая индикаторная панель в дополнение или, по меньшей мере, вместо одного источника света.
В одном аспекте настоящей технологии является предпочтительным, чтобы электроинструмент дополнительно имел трехфазный бесщеточный двигатель для приведения в действие режущего инструмента, управляющее устройство двигателя для приведения в действие трехфазного бесщеточного двигателя при помощи сигналов напряжения прямоугольной формы, и блок уведомления. В этом случае является предпочтительным, чтобы управляющее устройство двигателя было выполнено с возможностью выборочной выработки сигнала напряжения первой прямоугольной формы, соответствующего первому угловому положению ротора двигателя, и сигнала напряжения второй прямоугольной формы, соответствующего второму угловому положению ротора, а блок уведомления был выполнен с возможностью выборочного выполнения одного, по меньшей мере, из двух видов уведомлений, соответствующих форме выбранного сигнала напряжения, вырабатываемого управляющим устройством.
Вариант осуществления 1
Циркулярная пила 10 из первого варианта осуществления описана со ссылкой на чертежи. Как показано на Фиг. 1, циркулярная пила 10 имеет основной корпус 12, пильное полотно 30 и аккумуляторную батарею 22. Пильное полотно 30 является дисковидным полотном и используется для резки заготовки (дерева). Аккумуляторная батарея 22 является источником электропитания для подачи электроэнергии в основной корпус 12, и она имеет возможность присоединения и отсоединения от основного корпуса 12. Аккумуляторная батарея 22 является источником электропитания DC (постоянного тока), внутри которого вмещается множество литиево-ионных электрохимических элементов, с номинальным напряжением 18 вольт. Отметим, что тип аккумуляторной батареи 22, или, в частности, номинальное напряжение, этим не ограничены.
В основном корпусе 12 имеется двигатель 14 для приведения в действие пильного полотна 30, курковый переключатель 16 для запуска двигателя 14, рукоять 18 для ее захвата пользователем, и вал 20 режущего инструмента, удерживающий пильное полотно 30. Пользователь может подавать электроэнергию от аккумуляторной батареи 22 на двигатель 14 посредством манипулирования курковым переключателем 16. В результате, двигатель 14 приводит во вращение пильное полотно 30 и вал 20 режущего инструмента.
Фиг. 2 иллюстрирует электрическую схему, изображающую электрическую конфигурацию циркулярной пилы 10. Как показано на Фиг. 2, циркулярная пила 10, главным образом, имеет двигатель 14 и управляющее устройство 38 двигателя для управления двигателем 14. Двигатель 14 является трехфазным бесщеточным двигателем и имеет ротор (не показан) с постоянным магнитом и статор (не показан) с трехфазной катушкой. Фазная клемма U 14U, фазная клемма V 14V, и фазная клемма W 14W двигателя 14 имеют электрическое соединение с аккумуляторной батареей 22 через управляющее устройство 38 двигателя. Двигатель 14 также обеспечен датчиком положения 15, который измеряет положение ротора. Датчик положения 15 также соединен с управляющим устройством 38 двигателя.
Управляющее устройство 38 двигателя выборочно соединяет каждую из фазных клемм 14U, 14V, 14W двигателя 14 с положительным электродом 22а или отрицательным электродом 22b аккумуляторной батареи 22 в соответствии с измеренным угловым положением ротора. Следовательно, управляющее устройство 38 двигателя управляет напряжением, прикладываемым к каждой из фазных клемм 14U, 14V, 14W в соответствии с угловым положением ротора. Каждая из Фиг. 3 и 4 изображает форму сигнала напряжения каждой из фазных клемм 14U, 14V, 14W, управляемых посредством управляющего устройства 38 двигателя. Управляющее устройство 38 двигателя приводит в действие двигатель 14 при помощи сигналов напряжения прямоугольной формы. Следовательно, как показано на Фиг. 3 и 4, напряжение, прикладываемое к каждой из фазных клемм 14U, 14V, 14W, изменяет форму прямоугольного сигнала в соответствии с угловым положением ротора. Фиг. 3 изображает полученную форму сигнала напряжения, если угол проводимости установлен на 120 градусов. Фиг. 4 изображает полученную форму сигнала напряжения, если угол проводимости установлен на 150 градусов. Таким образом, управляющее устройство 38 двигателя может изменять угол проводимости между 120 градусами и 150 градусами, причем угол проводимости используется для приведения в действие двигателя 14 при помощи сигналов напряжения прямоугольной формы.
Как показано на Фиг. 5, эксплуатационные параметры двигателя 14 значительно изменяются в зависимости от угла проводимости. В частности, если угол проводимости увеличивается, то выходные вращающие моменты (С, D) двигателя 14 уменьшаются, и скорости вращения (А, В) двигателя 14 увеличиваются. В циркулярной пиле 10 из настоящего варианта осуществления, угол проводимости устанавливается на 150 градусов, если к пильному полотну 30 прикладывается малая нагрузка, и угол проводимости устанавливается на 120 градусов, если к пильному полотну 30 прикладывается большая нагрузка. Следовательно, при резке тонкой пластины, электроинструмент эксплуатируется с углом проводимости в 150 градусов и, предпочтительно, с угловой скоростью двигателя 14. В этом случае, тонкая пластина может быть разрезана за короткий промежуток времени, в связи с тем, что пильное полотно 30 приводится в действие с высокой скоростью. С другой стороны, при резке толстой пластины, электроинструмент эксплуатируется с углом проводимости в 120 градусов и, предпочтительно, с выходными крутящими моментами двигателя 14. В этом случае, относительно толстая пластина может быть гарантированно разрезана в связи с тем, что пильное полотно 30 приводится в действие с высоким крутящим моментом.
В настоящем варианте осуществления, угол проводимости изменяется между 120 градусами и 150 градусами; однако, угол проводимости может изменяться и между другими углами. Кроме того, угол проводимости может изменяться не только между двумя значениями, но также между тремя или более значениями. Является предпочтительным, чтобы угол проводимости изменялся, по меньшей мере, между двумя значениями, то есть, между 120 градусами и 180 градусами.
Как показано на Фиг. 5, в связи с тем, что угловая скорость двигателя 14 варьируется в соответствии с углом проводимости, изменение угла проводимости приводит к изменению угловой скорости двигателя 14. Значительное изменение угла проводимости в пределах короткого промежутка времени приводит к существенному колебанию угловой скорости двигателя 14, что вызывает сильное неудобство пользователя. Поэтому является предпочтительным, чтобы угол проводимости постепенно изменялся на протяжении заданного промежутка времени.
Теперь описывается процедура изменения угла проводимости в настоящем варианте осуществления со ссылкой на Фиг. 6. Как показано на Фиг. 6, при значительном изменении угла проводимости со 120 градусов на 150 градусов, форма сигнала напряжения, которое должно быть приложено к двигателю 14, изменяется от (а) до (f). Другими словами, управляющее устройство 38 двигателя сначала постепенно выполняет опережение момента времени начала проводимости, сохраняя угол проводимости (a→b→c→d), а затем постепенно увеличивает угол проводимости, сохраняя момент времени начала проводимости (d→e→f). С другой стороны, при уменьшении угла проводимости со 150 градусов на 120 градусов, форма сигнала напряжения, которое должно быть приложено к двигателю 14, изменяется в обратном направлении от (f) до (а). Другими словами, управляющее устройство 38 двигателя сначала постепенно уменьшает угол проводимости, сохраняя момент времени начала проводимости (f→e→d), а после того постепенно выполняет отсрочку момента времени начала проводимости, сохраняя угол проводимости (d→c→b→a). Эта процедура может предотвратить резкое колебание угловой скорости двигателя 14.
Как было описано выше, управляющее устройство 38 двигателя изменяет угол проводимости в соответствии с нагрузкой, прикладываемой к режущему инструменту. В этом случае, управляющее устройство 38 двигателя может измерять показатель, соответствующий нагрузке, а затем изменять угол проводимости в соответствии с измеренным показателем. Примеры показателя, соответствующего нагрузке, прикладываемой к режущему инструменту, включают в себя значение тока двигателя 14 и угловую скорость двигателя 14. Кроме того, в связи с тем, что выходное напряжение аккумуляторной батареи 22 изменяется в соответствии со значением тока двигателя 14, выходное напряжение аккумуляторной батареи 22, аналогичным образом, может являться показателем, соответствующим нагрузке. Разумеется, управляющее устройство 38 двигателя может непосредственно измерять нагрузку, прикладываемую к режущему инструменту, а затем изменять угол проводимости на основе измеренного значения. Как описано далее в настоящем варианте осуществления, угол проводимости изменяется в соответствии со значением тока двигателя 14.
Далее в настоящем документе подробно описано управляющее устройство 38 двигателя из настоящего варианта осуществления; однако структура и операции управляющего устройства 38 двигателя не ограничены конкретными описанными ниже примерами.
Управляющее устройство 38 двигателя имеет трехфазную инверторную схему 40 и контроллер 70, который управляет трехфазной инверторной схемой 40. В трехфазной инверторной схеме 40 имеются с первого по шестой переключающие элементы 41-46. Первый переключающий элемент 41 обеспечен между положительным электродом 22а аккумуляторной батареи 22 и фазной клеммой U 14U двигателя 14. Второй переключающий элемент 42 обеспечен между положительным электродом 22а аккумуляторной батареи 22 и фазной клеммой V 14V двигателя 14. Третий переключающий элемент 43 предоставлен между положительным электродом 22а аккумуляторной батареи 22 и фазной клеммой W 14W двигателя 14. Четвертый переключающий элемент 44 обеспечен между PGND (заземление) и фазной клеммой U 14U двигателя 14. Пятый переключающий элемент 45 обеспечен между PGND и фазной клеммой V 14V двигателя 14. Шестой переключающий элемент 46 обеспечен между PGND и фазной клеммой W 14W двигателя 14.
Полупроводники на основе Si (кремний) или полупроводниковые транзисторы на основе GaN (нитрид галлия) используются в качестве переключающих элементов 41-46. Отметим, что в качестве переключающих элементов 41-46 могут быть использованы и другие полупроводниковые транзисторы типа AIIIBV. Альтернативно, в качестве переключающих элементов 41-46 могут быть использованы полупроводниковые транзисторы на основе SiC (карбид кремния). Не только эти полупроводниковые транзисторы, но также и различные типы других полупроводниковых переключателей могут быть использованы в качестве переключающих элементов 41-46.
PGND трехфазной инверторной схемы 40 соединено с отрицательным электродом 22b аккумуляторной батареи 22 через автоматический выключатель 48 и шунтирующее сопротивление 50. Автоматический выключатель 48 является полевым транзистором (FET) с каналом n-типа. Автоматический выключатель 48 соединен с контроллером 70 и управляется посредством контроллера 70. Например, если пользователь выключает курковый переключатель 16, то автоматический, выключатель 48 также выключается. В результате, независимо от состояния трехфазной инверторной схемы 40, двигатель 14 электрически отсоединяется от аккумуляторной батареи 22. В этой конфигурации схемы, в связи с тем, что курковый переключатель 16 может быть выключен из цепи электропитания двигателя, может быть устранена потеря передачи, возникающая вследствие сопротивления контакта куркового переключателя 16. Кроме того, контроллер 70 из настоящего варианта осуществления включает с первого по третий переключающий элементы 41-43, если автоматический выключатель 48 выключен, и накоротко замыкает катушку двигателя 14, и, тем самым, применяет тормоз к двигателю 14.
В настоящем варианте осуществления, электрод 48а стока автоматического выключателя 48 соединен с 5-вольтной клеммой напряжения через резистивный элемент 52, в целях диагностики отказа автоматического выключателя 48. Кроме того, напряжение электрода 48а стока проверяется посредством контроллера 70. Контроллер 70 может определять нормальное/ненормальное состояние автоматического выключателя 48 посредством включения/выключения автоматического выключателя 48 и измерения напряжения электрода 48а стока.
Управляющее устройство 38 двигателя имеет схему 54 измерения тока и схему 60 измерения напряжения. Схема 54 измерения тока может измерять ток, текущий через двигатель 14 (ток двигателя), на основе напряжения, сгенерированного в шунтирующем сопротивлении 50. Схема 60 измерения напряжения может измерять выходное напряжение аккумуляторной батареи 22 (напряжение аккумулятора). Значения, измеренные посредством схемы 54 измерения тока и схемы 60 измерения напряжения, вводятся в контроллер 70.
Управляющее устройство 38 двигателя имеет схему 56 измерения положения ротора и схему 58 вычисления скорости ротора. Схема 56 измерения положения ротора соединена с датчиком 15 положения двигателя 14 и измеряет угловое положение ротора двигателя 14 на основе сигнала, выведенного из датчика 15 положения. Значение, измеренное посредством схемы 56 измерения положения ротора, вводится в схему 58 вычисления скорости ротора и в контроллер 70. Схема 58 вычисления скорости ротора вычисляет угловую скорость ротора двигателя 14 на основе значения, измеренного посредством схемы 56 измерения положения ротора. Значение, вычисленное посредством схемы 58 вычисления скорости ротора, вводится в контроллер 70.
Управляющее устройство 38 двигателя имеет термодатчик 62 и схему 64 измерения температуры. Термодатчик 62 расположен рядом с автоматическим выключателем 48 и выводит сигнал, соответствующий температуре автоматического выключателя 48, в схему 64 измерения температуры. Схема 64 измерения температуры измеряет температуру автоматического выключателя 48 на основе сигнала, выведенного из термодатчика 62. Измеренная температура автоматического выключателя 48 сообщается в контроллер 70. Отметим, что термодатчик 62 может быть расположен рядом с трехфазной инверторной схемой 40, контроллером 70 или двигателем 14.
Контроллер 70 имеет вентильную схему 72 управления, блок 74 генерирования сигнала PWM (широтно-импульсной модуляции) и детектор 76 перегрузки по току. Вентильная схема 72 управления соединена с вентилями переключающих элементов 41-46. Вентильная схема 72 управления выборочно выводит сигналы ON (включено) на переключающие элементы 41-46 в соответствии с измеренным угловым положением ротора. В результате, каждая из фазных клемм 14U, 14V, 14W двигателя 14 выборочно соединяется с положительным электродом 22а или отрицательным электродом 22b аккумуляторной батареи 22. Блок 74 генерирования сигнала PWM генерирует сигнал широтно-импульсной модуляции (PWM) в соответствии с уровнем воздействия на курковый переключатель 16. Вентильная схема 72 управления управляет PWM каждого из переключающих элементов 41-46 в ответ на сигнал PWM, сгенерированный посредством блока 74 генерирования сигнала PWM. В результате, существенное значение напряжения, приложенного к двигателю 14, регулируется на основе уровня воздействия на курковый переключатель 16.
Детектор 76 перегрузки по току хранит ограничивающее значение тока двигателя 14. Например, в настоящем варианте осуществления, ограничивающее значение устанавливается на 60 ампер. Детектор 76 перегрузки по току измеряет перегрузку по току двигателя 14 посредством сравнения измеренного значения тока двигателя 14 с ограничивающим значением. Результат измерения посредством детектора 76 перегрузки по току вводится в вентильную схему 72 управления. Если в двигателе 14 обнаружена перегрузка по току, то вентильная схема 72 управления уменьшает продолжительность включения двигателя 14. Это может препятствовать блокированию двигателя 14 и его перегоранию.
Контроллер 70 дополнительно имеет блок 78 определения угла опережения/угла проводимости и блок 80 хранения данных. Блок 78 определения угла опережения/угла проводимости определяет угол проводимости и угол опережения на основе значения, измеренного посредством схемы 54 измерения тока. Как было описано выше, угол проводимости устанавливается на 120 градусов или 150 градусов, а угол опережения определяется на основе этого угла проводимости. Например, в настоящем варианте осуществления, угол опережения установлен на 22,5 градусов относительно угла проводимости в 120 градусов и на 30 градусов относительно угла проводимости в 150 градусов. Данные, такие как варианты угла проводимости (120 градусов и 150 градусов в настоящем варианте осуществления), значение угла опережения относительно каждого угла проводимости, и первое и второе пороговые значения, которые будут описаны далее в настоящем документе, заранее сохраняются в блоке 80 хранения данных. Блок 78 определения угла опережения/угла проводимости выполняет процесс определения угла проводимости и угла опережения на основе этих данных, хранящихся в блоке 80 хранения данных. Данные, хранящиеся в блоке 80 хранения данных, могут быть должным образом установлены в соответствии с конфигурацией, областью применения и функциями электроинструмента (в данном варианте осуществления, циркулярной пилы 10).
Фиг. 7 иллюстрирует схему последовательности операций, изображающую процесс определения угла проводимости. Процесс, изображенный на Фиг. 7, выполняется, главным образом, посредством блока 78 определения угла опережения/угла проводимости контроллера 70. Как показано на Фиг. 7, сначала, значение тока двигателя 14 измеряется на основе значения, измеренного посредством схемы 54 измерения тока (этап S112). Если в этот момент угол проводимости равен 120 градусов (ДА на этапе S114), то измеренное значение тока сравнивается с первым пороговым значением (этап S116). Если измеренное значение тока превышает первое пороговое значение (ДА на этапе S116), то угол проводимости сохраняется на 120 градусах (этап S120). С другой стороны, если измеренное значение тока меньше или равно первому пороговому значению (НЕТ на этапе S116), то угол проводимости изменяется до 150 градусов (этап S122). В этот момент, угол опережения, аналогичным образом, изменяется в тот же самый момент времени с 22,5 градусов на 30 градусов.
Если в этот момент угол проводимости равен 150 градусам (НЕТ на этапе S114), то измеренное значение тока сравнивается со вторым пороговым значением (этап S118). Если измеренное значение тока превышает второе пороговое значение (ДА на этапе S118), то угол проводимости изменяется на 120 градусов (этап S120). В этот момент, угол опережения, аналогичным образом, изменяется в тот же самый момент времени с 30 градусов на 22,5 градусов. Если измеренное значение тока меньше или равно второму пороговому значению (НЕТ на этапе S118), то угол проводимости сохраняется на 150 градусах (этап S122).
Как было описано выше, применяются различные пороговые значения для определения того, требуется ли изменение угла проводимости со 120 градусов на 150 градусов, и требуется ли изменение угла проводимости со 150 градусов на 120 градусов. В данном случае, относительно значения тока двигателя 14, первое пороговое значение должно быть ниже второго порогового значения. Следовательно, это соотношение может обеспечить гистерезисные характеристики процесса для изменения угла проводимости таким образом, чтобы можно было воспрепятствовать излишнему многократному изменению угла проводимости, даже если измеренное значение тока колеблется точно вокруг порогового значения. Несмотря на то, что первое пороговое значение и второе пороговое значение особо не ограничены, в настоящем варианте осуществления, первое пороговое значение установлено на 10 ампер, а второе пороговое значение установлено на 15 ампер.
Как было описано выше, другой индекс, соответствующий нагрузке, прикладываемой к пильному полотну 30, может быть использован в процессе изменения угла проводимости. Фиг. 8 изображает пример, в котором угловая скорость двигателя 14 используется вместо значения тока двигателя 14. В процессе, изображенном на Фиг. 8, сначала, угловая скорость двигателя 14 измеряется на основе результата вычисления, выполненного посредством схемы 58 вычисления скорости ротора (этап S212). Если в этот момент угол проводимости равен 120 градусов (ДА на этапе S214), то измеренная угловая скорость сравнивается с первым пороговым значением (этап S216). Если измеренная угловая скорость ниже первого порогового значения (ДА на этапе S216), то угол проводимости сохраняется на 120 градусах (этап S220). Если измеренная угловая скорость больше или равна первому пороговому значению (НЕТ на этапе S216), то угол проводимости изменяется на 150 градусов (этап S222). В этот момент, угол опережения, аналогичным образом, изменяется в тот же самый момент времени с 22,5 градусов на 30 градусов.
Если в этот момент угол проводимости равен 150 градусов (НЕТ на этапе S214), то измеренная угловая скорость сравнивается со вторым пороговым значением (этап S218). Если измеренная угловая скорость ниже второго порогового значения (ДА на этапе S218), то угол проводимости изменяется на 120 градусов (этап S220). В этот момент угол опережения, аналогичным образом, изменяется в тот же самый момент времени с 30 градусов на 22,5 градусов. Если, с другой стороны, измеренная угловая скорость больше или равна второму пороговому значению (НЕТ на этапе S218), то угол проводимости сохраняется на 150 градусах (этап S222). В случае если угловая скорость двигателя 14 используется таким способом, различные пороговые значения применяются для определения того, требуется ли изменение угла проводимости со 120 градусов на 150 градусов, и требуется ли изменение угла проводимости со 150 градусов на 120 градусов. В данном случае, относительно угловой скорости двигателя 14, первое пороговое значение должно быть больше или равно второму пороговому значению.
Фиг. 9 изображает пример, в котором значение напряжения аккумуляторной батареи 22 используются вместо значения тока и угловой скорости двигателя 14. В процессе, изображенном на Фиг. 9, сначала значение напряжения аккумуляторной батареи 22 измеряется на основе значения, измеренного посредством схемы 60 измерения напряжения (этап S312). Если в этот момент угол проводимости равен 120 градусов (ДА на этапе S314), то измеренное значение напряжения сравнивается с первым пороговым значением (этап S316). Если измеренное значение напряжения ниже первого порогового значения (ДА на этапе S316), то угол проводимости сохраняется на 120 градусах (этап S320). Если измеренное значение напряжения больше или равно первому пороговому значению (НЕТ на этапе S316), то угол проводимости изменяется на 150 градусов (этап S322). В этот момент, угол опережения, аналогичным образом, изменяется в тот же самый момент времени с 22,5 градусов на 30 градусов.
С другой стороны, если в этот момент угол проводимости равен 150 градусов (НЕТ на этапе S314), то измеренное значение напряжения сравнивается со вторым пороговым значением (этап S318). Если измеренное значение напряжения ниже второго порогового значения (ДА на этапе S318), то угол проводимости изменяется на 120 градусов (этап S320). В этот момент, угол опережения, аналогичным образом, изменяется в тот же самый момент времени с 30 градусов на 22,5 градусов. Если измеренное значение напряжения больше или равно второму пороговому значению (НЕТ на этапе S318), то угол проводимости сохраняется на 150 градусах (этап S322). В случае если значение напряжения аккумуляторной батареи 22 используется таким способом, то различные пороговые значения могут применяться для определения того, требуется ли изменение угла проводимости со 120 градусов на 150 градусов и требуется ли изменение угла проводимости со 150 градусов на 120 градусов. В данном случае, относительно значения напряжения аккумуляторной батареи 22, первое пороговое значение должно быть больше второго порогового значения.
Кроме того, в циркулярной пиле 10 из настоящего варианта осуществления, угол проводимости также изменяется в соответствии с температурой, измеренной посредством термодатчика 62. Как изображено на Фиг. 5, если циркулярная пила 10 работает без нагрузки (холостой ход) с углом проводимости в 120 градусов, то двигатель 14 вращается со скоростью 21200 об/мин (оборотов в минуту), и значение тока двигателя 14 равно 1,51 А. Однако если циркулярная пила 10 работает без нагрузки (холостой ход) с углом проводимости в 150 градусов, то двигатель 14 вращается со скоростью 34800 оборотов в минуту, а значение тока двигателя 14 увеличивается до 7,0 А. Таким образом, увеличение угла проводимости приводит к существенному увеличению значения тока после работы без нагрузки и, следовательно, к возможному перегреву двигателя 14 и управляющего устройства 38 двигателя. Поэтому, циркулярная пила 10 согласно настоящему варианту осуществления сконфигурирована для изменения угла проводимости со 150 градусов на 120 градусов, если температура двигателя 14 или управляющего устройства 38 двигателя увеличивается.
Фиг. 10 иллюстрирует схему последовательности операций описанного выше процесса, который является процессом изменения угла проводимости в соответствии с температурой, измеренной посредством термодатчика 62. В процессе, изображенном на Фиг. 10, сначала температура автоматического выключателя 48 измеряется посредством термодатчика 62 и схемы 64 измерения температуры (этап S412). Если в этот момент угол проводимости равен 120 градусов (ДА на этапе S414), то измеренная температура сравнивается с первым пороговым значением (этап S416). Если измеренная температура больше первого порогового значения (ДА на этапе S416), то угол проводимости сохраняется на 120 градусах (этап S420). Если измеренная температура меньше или равна первому пороговому значению (НЕТ на этапе S416), то угол проводимости изменяется на 150 градусов (этап S422). В этот момент, угол опережения, аналогичным образом, изменяется в тот же момент времени с 22,5 градусов на 30 градусов.
Если, с другой стороны, в этот момент угол проводимости равен 150 градусов (НЕТ на этапе S414), то измеренная температура сравнивается со вторым пороговым значением (этап S418). Если измеренная температура больше второго порогового значения (ДА на этапе S418), то угол проводимости изменяется на 120 градусов (этап S420). В этот момент, угол опережения, аналогичным образом, изменяется в тот же самый момент времени с 30 градусов на 22,5 градусов. Если измеренная температура больше или равна второму пороговому значению (НЕТ на этапе S418), то угол проводимости сохраняется на 150 градусах (этап S422). Если температура автоматического выключателя 48 увеличивается ненормально, то угол проводимости изменяется со 150 градусов на 120 градусов таким образом, чтобы значение тока двигателя 14 понижалось. Кроме того, в этом процессе, различные пороговые значения могут применяться для определения того, требуется ли изменение угла проводимости со 120 градусов на 150 градусов, и требуется ли изменение угла проводимости со 150 градусов на 120 градусов. В данном случае, относительно температуры, первое пороговое значение должно быть меньше второго порогового значения.
В настоящем варианте осуществления, развиваемая мощность электроинструмента улучшена посредством изменения угла проводимости. С другой стороны, в другом варианте осуществления, электрический коэффициент полезного действия электроинструмента может быть улучшен посредством изменения угла проводимости. Фиг. 11 иллюстрирует график, изображающий соотношение между углом проводимости и электрическим коэффициентом полезного действия. Как изображено на Фиг. 11, если ток двигателя является относительно низким, то электрический коэффициент полезного действия может быть улучшен посредством установки угла проводимости на 120 градусов, а если ток двигателя является относительно высоким, то электрический коэффициент полезного действия может быть улучшен посредством установки угла проводимости на 150 градусов. Это означает, что электроинструмент может постоянно работать с высоким электрическим коэффициентом полезного действия посредством установки угла проводимости на 120 градусов, если ток двигателя является относительно низким, и посредством установки угла проводимости на 150 градусов, если ток двигателя является относительно высоким. В данном случае, ток двигателя соответствует нагрузке, прикладываемой к режущему инструменту. Следовательно, при улучшении электрического коэффициента полезного действия, чем больше нагрузка, прикладываемая к режущему инструменту, тем выше значение, на которое устанавливается угол проводимости. Это означает, что выполняется процесс, противоположный процессу улучшения развиваемой мощности, изображенному на Фиг. 7, 8 и 9.
В связи с вышеописанным, в другом варианте осуществления является оптимальным выполнение конфигурации управляющего устройства 38 двигателя таким образом, чтобы иметь возможность выбора между «режимом высокой мощности, где угол проводимости устанавливается на большее значение по мере уменьшения нагрузки, прикладываемой к режущему инструменту» и «режимом энергосбережения, где угол проводимости устанавливается на большее значение по мере увеличения нагрузки, прикладываемой к режущему инструменту». В этом случае, является оптимальным, чтобы управляющее устройство 38 двигателя выбирал между этими двумя режимами в соответствии с уровнем заряда аккумуляторной батареи 22. Другими словами, при достаточном заряде аккумуляторной батареи 22, электроинструмент, предпочтительно, работает в «режиме высокой мощности», а если уровень заряда аккумуляторной батареи 22 падает до предварительно определенного уровня, то, предпочтительно, режим переключается на «режим энергосбережения». Уровень заряда аккумуляторной батареи 22 может оцениваться на основе, например, напряжения аккумуляторной батареи 22, измеряемого посредством схемы 60 измерения напряжения. Следовательно, управляющее устройство 38 двигателя может должным образом выбирать между этими двумя режимами в соответствии со значением, измеренным посредством схемы 60 измерения напряжения.
Второй вариант осуществления
Электроинструмент 110 из второго варианта осуществления описан со ссылкой на чертежи. В отличие от электроинструмента 10 первого варианта осуществления, электроинструмент 110 настоящего варианта осуществления дополнительно имеет блок 132 индикации, обеспеченный в его основном корпусе 112, как показано на Фиг. 12. Другие конфигурации электроинструмента 110 являются аналогичными конфигурациям электроинструмента 10 из первого варианта осуществления. Следовательно, совпадающие части описания электроинструмента опускаются, посредством включения в его состав описания из первого варианта осуществления.
Блок 132 индикации является примером блока уведомления, и он способен сообщать пользователю различные типы информации. Блок 132 индикации имеет множество LED (светодиодов), включающих в диод LED 134 индикатора режима и диоды LED 136 индикатора прибора. Блок 132 индикации индицирует различные типы информации, которая будет сообщена пользователю, посредством выборочной активизации одного или множества диодов LED 134, 136. Отметим, что блок 132 индикации может иметь другой источник света или жидкокристаллическую панель вместо или в дополнение к этим диодам LED. Конфигурация блока 132 индикации особо не ограничена.
Как изображено на Фиг. 14, электроинструмент 110 настоящего варианта осуществления имеет второй контроллер 140, который приводит в действие диоды LED 134, 136 блока 132 индикации. Второй контроллер 140 сконфигурирован с использованием микропроцессора (или микрокомпьютера). Как и в случае контроллера 70, описанного в первом варианте осуществления (далее в настоящем документе называемого «первым контроллером 70») (см. Фиг. 2), второй контроллер 140 имеет электрическое соединение со схемой 64 измерения температуры, схемой 58 вычисления скорости ротора, схемой 60 измерения напряжения, схемой 54 измерения тока и курковым переключателем 16. Отметим, что первый и второй контроллеры 70 и 140 могут быть сконфигурированы с использованием одного и того же микропроцессора (или микрокомпьютера).
Второй контроллер 140 имеет блок 142 определения режима, блок 144 определения оставшейся энергии, блок 146 определения нагрузки, блок 148 выбора индицируемой информации и трансформатор 150 LED. Блок 142 определения режима идентифицирует угол проводимости, установленный посредством первого контроллера 70, на основе значения, измеренного посредством схемы 54 измерения тока. Как было описано выше, в первом контроллере 70 хранятся первое и второе пороговые значения для значений, измеренных посредством схемы 54 измерения тока, и в нем устанавливается угол проводимости на 150 градусов или 120 градусов на основе соотношения величины между измеренным значением и двумя пороговыми значениями (см. Фиг. 7). Следовательно, в блоке 142 определения режима, аналогичным образом, хранятся те же самые первое и второе пороговые значения, и в нем определяется угол проводимости, который должен быть установлен посредством первого контроллера 70 на основе соотношения величин между значением, измеренным посредством схемы 54 измерения тока, и двумя сохраненными пороговыми значениями. Соответственно, второй контроллер 140 уникально идентифицирует угол проводимости, который должен быть установлен посредством первого контроллера 70, независимо от угла проводимости, который фактически установлен. Результат определения, выполненного посредством второго контроллера 140, отправляется в блок 148 выбора индицируемой информации.
Как было описано выше, блок 142 определения режима идентифицирует угол проводимости, установленный посредством первого контроллера 70, в соответствии со значением тока двигателя 14. В данном случае, значение тока двигателя 14 означает показатель, соответствующий нагрузке, прикладываемой к пильному полотну 30, которое является режущим инструментом. Следовательно, при идентификации угла проводимости, установленного посредством первого контроллера 70, блок 142 определения режима может использовать другой показатель, соответствующий нагрузке, прикладываемой к пильному полотну 30, вместо значения тока двигателя 14. Примеры этого используемого показателя включают в себя угловую скорость двигателя 14, значение напряжения аккумуляторной батареи 22, и температуру двигателя 14 или управляющего устройства 38 двигателя.
Блок 144 определения оставшейся мощности определяет оставшуюся энергию (уровень заряда) аккумуляторной батареи 22 на основе значения, измеренного посредством схемы 60 измерения напряжения (то есть, значения напряжения аккумуляторной батареи 22). Результат определения, выполненного посредством блока 144 определения оставшейся мощности, отправляется в блок 148 выбора индицируемой информации. Отметим, что блок 144 определения оставшейся мощности может определить оставшуюся энергию аккумуляторной батареи 22 на основе другого индекса, отличного от значения напряжения аккумуляторной батареи 22.
Блок 146 определения нагрузки определяет нагрузку на режущий инструмент (нагрузку, прикладываемую к ленточной пиле 30), на основе значения, измеренного посредством схемы 54 измерения тока (то есть, значения тока двигателя 14). Результат определения, выполненного посредством блока 146 определения нагрузки, отправляется в блок 148 выбора индицируемой информации. Отметим, что блок 146 определения нагрузки может определять нагрузку на режущий инструмент на основе другого индекса, отличного от значения тока двигателя 14.
Блок 148 выбора отображаемой информации выбирает информацию, которая должна быть указана на блоке 132 индикации, из информации, отправленной из блока 142 определения режима, блока 144 определения оставшейся энергии и блока 146 определения нагрузки. Блок 148 выбора отображаемой информации имеет электрическое соединение с курковым переключателем 16, и выбирает информацию, которая должна быть указана, в ответ на воздействие, применяемое к курковому переключателю 16. Эта характерная особенность описана далее в настоящем документе со ссылкой на Фиг. 18. Выбранная информация отправляется на трансформатор 150 LED. На основе принятой информации, трансформатор 150 LED выборочно активирует диоды LED 134, 136 блока 132 индикации. Следовательно, блок 132 индикации выборочно индицирует информацию относительно угла проводимости (то есть, информацию относительно режима работы), информацию относительно оставшейся энергии аккумуляторной батареи 22, и информацию относительно нагрузки на режущий инструмент.
Фиг. 15 изображает пример индикации угла проводимости. Если угол проводимости равен 150 градусов, то диод LED 134 индикации режима активируется, как показано на Фиг. 15А. С другой стороны, если угол проводимости равен 120 градусов, то диод LED 134 индикации режима деактивируется, как показано на Фиг. 15В. Следовательно, пользователь может знать, что текущий угол проводимости равен 150 градусов или 120 градусов на основе того, активирован ли диод LED 134 индикации режима или нет.
Фиг. 16 изображает пример того, как отображается оставшаяся энергия аккумуляторной батареи 22. Как показано на Фиг. 16А-16С, оставшаяся энергия аккумуляторной батареи 22, отображается посредством диодов LED 136 индикатора прибора. Фиг. 16А показывает малую оставшуюся энергию аккумуляторной батареи 22. Фиг. 16В изображает половину оставшейся энергии аккумуляторной батареи 22. Фиг. 16С изображает большую оставшуюся энергию аккумуляторной батареи 22. Чем больше диодов LED 136 индикатора прибора активировано, тем больше оставшаяся энергия аккумуляторной батареи 22.
Фиг. 17 изображает пример того, как отображается нагрузка на режущий инструмент. Как изображено на Фиг. 17А-17С, нагрузка на режущий инструмент отображается посредством диодов LED 136 индикатора прибора. Фиг. 17А изображает малую нагрузку на режущий инструмент. Фиг. 17В изображает среднюю нагрузку на режущий инструмент. Фиг. 17С изображает большую нагрузку на режущий инструмент. Чем больше диодов LED 136 индикатора прибора активировано, тем больше нагрузка на режущий инструмент.
Фиг. 18 иллюстрирует схему последовательности операций, изображающую эксплуатацию блока 132 индикации. Операции блока 132 индикации описаны со ссылкой на Фиг. 18. Сначала, когда пользователь включает курковый переключатель 16 (ДА на этапе S512), диоды LED 136 индикатора прибора деактивируются (этап S514). Затем, первый контроллер 70 запускает процесс приведения в действие двигателя 14. Второй контроллер 140 идентифицирует угол проводимости (этап S518). Если угол проводимости равен 150 градусам, то активируется диод LED индикации режима (этап S520). Если угол проводимости равен 120 градусам, то диод LED индикации режима деактивируется (этап S522). Кроме того, измеряется значение тока двигателя 14 (этап S526). Второй контроллер 140 определяет нагрузку на режущий инструмент, а затем нагрузка на режущий инструмент отображается посредством диодов LED индикатора прибора (этап S526). Эти операции многократно выполняются, пока курковый переключатель 16 не выключается (этап S528).
Если курковый переключатель 16 выключен (ДА на этапе S528), то диоды LED 136 индикатора прибора деактивируются (этап S530), и привод двигателя 14 останавливается (этап S532). После этого, второй контроллер 140 определяет оставшуюся энергию аккумуляторной батареи 22 (этап S534), а затем эта оставшаяся энергия отображается посредством диодов LED 136 индикатора прибора (этап S536). Таким образом, в случае включения куркового переключателя 16, блок 132 индикации отображает установленный угол проводимости (то есть, режим работы) и нагрузку, прикладываемую к режущему инструменту. Затем, когда курковый переключатель 16 выключен, блок 132 индикации отображает оставшуюся энергию аккумуляторной батареи 22.
Способ индикации блока 132 индикации не ограничен конкретным вышеописанным примером. Например, Фиг. 19А-19h, изображают другие примеры индикации нагрузки на режущий инструмент. Если нагрузка на режущий инструмент ниже промежуточного значения, то активируется диод LED индикации режима, как изображено на Фиг. 19A-19D. В пределах этого диапазона, три диода LED 136 индикатора прибора поэтапно отображают интенсивность нагрузки на режущий инструмент. Если нагрузка на режущий инструмент больше промежуточного значения, то три диода LED 134 индикатора прибора деактивируются, как изображено на Фиг. 19Е-19G. В пределах этого диапазона, три диода LED 136 индикатора шаблона поэтапно индицируют интенсивность нагрузки на режущий инструмент. Если нагрузка на режущий инструмент слишком высока, то могут быть подсвечены три диода LED 136 индикатора прибора, как показано на Фиг. 19Н. Фиг. 19 и 20 изображают, что заштрихованная половина каждого из диодов LED 134, 136 является подсвеченной.
Фиг. 20A-20Н изображают другие примеры того, как выполняется индикация нагрузки на режущий инструмент. Эти примеры индикации изображают три состояния, а именно, деактивированное состояние, подсвеченное состояние и активированное состояние каждого из диодов LED 136 индикатора прибора. Следовательно, может быть указано восемь различных интенсивностей (или множество интенсивностей) нагрузки на режущий инструмент при использовании исключительно трех диодов LED индикатора прибора, как изображено на Фиг. 20А-20Н.
Выше описаны конкретные варианты осуществления настоящего изобретения, но они просто иллюстрируют некоторые возможности идеи изобретения и не ограничивают его формулу изобретения. Область техники, сформулированная в формуле изобретения, включает в себя изменения и модификации конкретных сформулированных выше примеров. Технические элементы, раскрытые в описании или на чертежах, могут быть использованы по отдельности или во всех типах комбинаций, и не ограничены комбинациями, сформулированными в формуле изобретения на момент подачи заявки. Кроме того, технология, раскрытая в настоящем документе, может быть использована для одновременного достижения множества целей или для достижения одной из этих целей.
Изобретение относится к области режущих электроинструментов. Электроинструмент содержит трехфазный бесщеточный двигатель для приведения в действие режущего инструмента, управляющее устройство двигателя, которое приводит его в действие при помощи сигналов напряжения прямоугольной формы, а также детектор нагрузки на режущем инструменте или детектор температуры. Управляющее устройство выполнено с возможностью изменять угол проводимости в зависимости от сигналов детекторов между двумя значениями, которые равны или больше 120 градусов и не больше 180 градусов. Использование изобретения позволяет расширить технологические возможности электроинструмента. 3 н. и 19 з.п. ф-лы, 39 ил.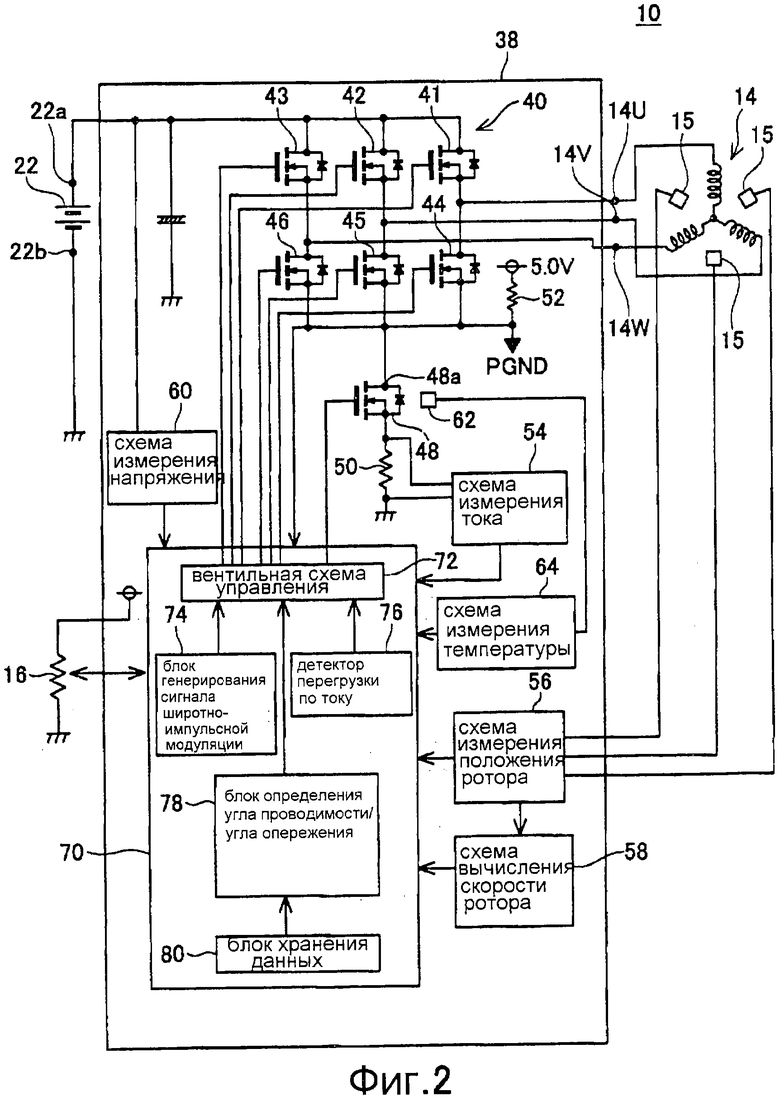
1. Режущий электроинструмент, содержащий
трехфазный бесщеточный двигатель для приведения в действие режущего инструмента,
первый детектор для измерения показателя нагрузки, прикладываемой к режущему инструменту, и
управляющее устройство двигателя, выполненное с возможностью приведения в действие трехфазного бесщеточного двигателя посредством сигналов напряжения прямоугольной формы и с возможностью изменения угла проводимости по меньшей мере между двумя значениями, которые равны или больше 120 градусов, причем не больше 180 градусов, в соответствии со значением показателя нагрузки, измеренным первым детектором.
2. Режущий электроинструмент по п. 1, в котором указанные значения угла проводимости включают значение, которое равно или больше 130 градусов, причем не больше 180 градусов.
3. Режущий электроинструмент по п. 1, в котором управляющее устройство двигателя выполнено с возможностью установки угла проводимости на большее значение по мере уменьшения нагрузки, прилагаемой к режущему инструменту.
4. Режущий электроинструмент по п. 1, в котором управляющее устройство двигателя выполнено с возможностью установки угла проводимости на большее значение по мере увеличения нагрузки, прилагаемой к режущему инструменту.
5. Режущий электроинструмент по п. 1, в котором управляющее устройство двигателя выполнено с возможностью осуществления выбора между «режимом высокой мощности», при котором угол проводимости устанавливается на большее значение по мере уменьшения нагрузки, прилагаемой к режущему инструменту, и «режимом энергосбережения», при котором угол проводимости устанавливается на большее значение по мере увеличения нагрузки, прилагаемой к режущему инструменту.
6. Режущий электроинструмент по п. 1, в котором управляющее устройство двигателя выполнено с возможностью
сохранения первого порогового значения и второго порогового значения показателя нагрузки,
изменения угла проводимости на второе значение угла в соответствии с соотношением между значением показателя нагрузки, измеренным посредством первого детектора, и упомянутым первым пороговым значением, если угол проводимости был установлен на первое значение, и
изменения угла проводимости на первое значение угла в соответствии с соотношением между значением показателя нагрузки, измеренным посредством первого детектора, и упомянутым вторым пороговым значением, если угол проводимости был установлен на второе значение.
7. Режущий электроинструмент, содержащий
трехфазный бесщеточный двигатель для приведения в действие режущего инструмента,
управляющее устройство двигателя, выполненное с возможностью приведения в действие трехфазного бесщеточного двигателя посредством сигналов напряжения прямоугольной формы, и
второй детектор для измерения температуры упомянутого двигателя или его управляющего устройства,
при этом управляющее устройство двигателя выполнено с возможностью изменения угла проводимости по меньшей мере между двумя значениями, которые равны или больше 120 градусов, причем не больше 180 градусов в соответствии со значением температуры, измеренным вторым детектором.
8. Режущий электроинструмент по п. 7, в котором указанные значения угла проводимости включают значение, которое равно или больше 130 градусов, причем не больше 180 градусов.
9. Режущий электроинструмент по п. 7, в котором управляющее устройство двигателя выполнено с возможностью
сохранения третьего и четвертого пороговых значений температуры,
изменения угла проводимости на второе значение угла, если значение температуры, измеренное посредством второго детектора, выше упомянутого третьего порогового значения и если угол проводимости был установлен на первое значение, и
изменения угла проводимости на первое значение угла, если значение температуры, измеренное посредством второго детектора, ниже упомянутого четвертого порогового значения и если угол проводимости был установлен на второе значение.
10. Режущий электроинструмент по п. 1 или 7, в котором управляющее устройство двигателя выполнено с возможностью при увеличении угла проводимости выполнения вначале переноса момента начала проводимости на более ранний момент времени при сохранении значения угла проводимости, а затем выполнения увеличения угла проводимости при сохранении момента времени его начала.
11. Режущий электроинструмент по п. 1 или 7, в котором управляющее устройство двигателя выполнено с возможностью при уменьшении угла проводимости выполнения вначале указанного уменьшения при сохранении момента времени начала проводимости, а затем выполнения переноса момента начала проводимости на более поздний момент времени при сохранении значения угла проводимости.
12. Режущий электроинструмент по п. 1 или 7, в котором управляющее устройство двигателя выполнено с возможностью последующего изменения угла опережения переключения фаз в соответствии с изменением угла проводимости.
13. Режущий электроинструмент по п. 1 или 7, который снабжен блоком уведомления, выполненным с возможностью выборочного уведомления, соответствующего значению угла проводимости, установленному посредством управляющего устройства двигателя.
14. Режущий электроинструмент по п. 13, в котором блок уведомления выполнен с возможностью однозначной идентификации значения угла проводимости, установленного посредством управляющего устройства двигателя, независимо от фактически установленного угла проводимости.
15. Режущий электроинструмент по п. 13, который снабжен первым детектором для измерения показателя нагрузки, прикладываемой к режущему инструменту, при этом
управляющее устройство двигателя выполнено с возможностью изменения угла проводимости в соответствии со значением нагрузки, измеренным посредством первого детектора, а
блок уведомления выполнен с возможностью выбора уведомления в соответствии со значением нагрузки, измеренным посредством первого детектора.
16. Режущий электроинструмент по п. 15, в котором управляющее устройство двигателя и блок уведомления выполнены с возможностью хранения по меньшей мере одного порогового значения нагрузки,
при этом управляющее устройство двигателя выполнено с возможностью изменения угла проводимости в соответствии с соотношением между значением нагрузки, измеренным посредством первого детектора, и по меньшей мере одним пороговым значением, а
блок уведомления выполнен с возможностью выполнения уведомления, соответствующего каждому углу проводимости в соответствии с соотношением между значением нагрузки, измеренным посредством первого детектора, и по меньшей мере одним пороговым значением.
17. Режущий электроинструмент по п. 15, в котором блок уведомления выполнен с возможностью выполнять уведомление, указывающее величину значения нагрузки, измеренного посредством первого детектора.
18. Режущий электроинструмент по п. 13, который снабжен
аккумулятором для подачи электроэнергии на трехфазный бесщеточный двигатель и
третьим детектором для измерения оставшейся энергии аккумулятора,
при этом блок уведомления выполнен с возможностью выполнения уведомления, соответствующего оставшейся энергии аккумулятора, измеренной посредством третьего детектора.
19. Режущий электроинструмент по п. 18, в котором блок уведомления выполнен с возможностью
выполнения уведомления, соответствующего выбранному углу проводимости при приведенном в действие двигателе, и
выполнения уведомления, соответствующего оставшейся энергии аккумулятора, при остановке двигателя.
20. Режущий электроинструмент по п. 19, в котором блок уведомления выполнен с возможностью выполнения уведомления, указывающего величину нагрузки, прикладываемой к режущему инструменту при приведенном в действие двигателе.
21. Режущий электроинструмент по п. 13, в котором блок уведомления включает в себя по меньшей мере один источник света.
22. Режущий электроинструмент, содержащий
трехфазный бесщеточный двигатель для приведения в действие режущего инструмента,
управляющее устройство двигателя, выполненное с возможностью приведения в действие трехфазного бесщеточного двигателя посредством сигналов напряжения прямоугольной формы и с возможностью выборочной выработки сигнала напряжения первой прямоугольной формы, соответствующего первому угловому положению ротора двигателя, и сигнала напряжения второй прямоугольной формы, соответствующего второму угловому положению ротора, и
блок уведомления, выполненный с возможностью выборочного выполнения одного, по меньшей мере, из двух видов уведомлений, соответствующих форме выбранного сигнала напряжения, вырабатываемого управляющим устройством.

