Заявленное изобретение относится к преобразовательной технике и может быть использовано при реализации цифровых систем управления однофазными инверторами с синусоидальной широтно-импульсной модуляцией с возможностью исключения опасных колебаний выходного напряжения, возникающих при определенном наборе параметров системы.
Известен способ IOP Conference Series: Materials Science and Engineering [1], называемый методом направления на цель, где для стабилизации неустойчивых желаемых динамических режимов предполагается использование линейной обратной связи.
Стабилизация желаемого динамического режима происходит за счет того, что к сигналу управления после регулятора напряжения прибавляется корректирующий сигнал, который представляет собой сумму компонент масштабированного вектора невязки, который представляет собой разность между вектором координат заданной неподвижной точки желаемого режима фиксируемого в дискретные моменты времени и вектором координат текущей рабочей точки, также фиксируемого в дискретные моменты времени.
К недостаткам указанного метода относится необходимость использования предварительно рассчитанных массивов координат неподвижных точек стробоскопического отображения Xst1=[x11reƒ, x12reƒ, x13reƒ, … x1greƒ]; Xst2=[x21reƒ, x22reƒ, x23reƒ, …x2greƒ] размером, равным кратности квантования q. Первый массив представляет собой набор заданий на желаемый ток дросселя в дискретные моменты времени на периоде низкочастотного выходного напряжения, а второй - набор заданий на желаемое напряжения на конденсаторе в дискретные моменты времени. Для их расчета используются вычислители неподвижных точек, предъявляющие серьезные требования к быстродействию управляющего микроконтроллера, что повышает стоимость системы управления и приводит к невозможности создания устройств с высокой кратностью квантования.
Известен способ 4th IEEE Conference on Industrial Electronics and Applications (ICIEA) [2], называемый методом с запаздывающей обратной связью, где для стабилизации неустойчивых желаемых динамических режимов инверторов с синусоидальной широтно-импульсной модуляцией также предполагается использование непрерывной линейной обратной связи.
Стабилизация желаемого динамического режима происходит за счет того, что к сигналу управления после регулятора напряжения непрерывно прибавляется корректирующий сигнал, который представляет собой масштабированную разность между током в момент времени t и током в момент времени t-a, где a - период широтно-импульсной модуляции, что позволяет обеспечить желаемый периодический режим. При этом данная коррекция относится к методам непрерывного управления нелинейными динамическим процессами.
К недостаткам данного метода является необходимость использования в подсистеме управления нелинейными динамическими процессами звена чистого запаздывания, которое может быть реализовано лишь с применением микроконтроллеров. Особенность микроконтроллерной реализации звена чистого запаздывания относит данную систему к классу квазинепрерывных систем управления. Также очевидно, что при реализации звена чистого запаздывания требования к микроконтроллеру достаточно высоки.
Целью изобретения является создание дискретной системы управления нелинейными динамическими процессами в однофазном инверторе напряжения для обеспечения его работы в желаемом динамическом режиме с малой амплитудой паразитных гармоник без использования предварительно рассчитываемого массива координат неподвижных точек стробоскопического отображения и без использования квазинепрерывного принципа управления, предъявляющего высокие требования к микроконтроллеру, реализующему звено чистого запаздывания.
Данная задача решается за счет того, что импульсы управления на ключи силовой части, состоящей из мостового инвертора и Г-образного LC-фильтра, подает система управления, включающая две подсистемы: главную подсистему, представляющую собой стандартную систему автоматического управления по отклонению и состоящую из вычислителя ошибки, вычисляющего разность между сигналом задания и сигналом обратной связи, усилителя обратной связи с заданным коэффициентом, регулятора, усиливающего сигнал ошибки с заданным коэффициентом, сумматора на один из входов которого подается сигнал после регулятора, а на второй - сигнал от вспомогательной системы управления динамическими процессами, устройства выборки-хранения, которое фиксирует сигнал управления в дискретные моменты времени, выходной сигнал которого подается на компаратор, который сравнивает этот сигнал с развертывающим напряжение, поступающим от специализированного генератора, и формирует управляющие импульсы силовыми ключами, что позволяет обеспечить синусоидальное выходное напряжение высокого качества в широком диапазоне вариации параметров системы; система управления нелинейными динамическими процессами,
отличающаяся тем, что рассматриваемом способе при расчете корректирующих воздействий в дискретные моменты в системе управления нелинейными динамическими процессами используются значения фазовых переменных в дискретные моменты на предыдущем периоде низкочастотного процесса, вычитание из которых с помощью вычитателей переменных состояния в дискретные моменты времени на текущем периоде низкочастотного процесса, фиксируемых устройствами выборки-хранения и масштабированных с заданными коэффициентами, формирует вектор невязки компоненты которого умножаются на заданные коэффициенты, и далее компоненты вектора невязки подаются на сумматор главной подсистемы управления, что позволяет дискретно по времени влиять на сигнал ошибки и обеспечивать устойчивость требуемого динамического режима.
Техническая реализация предлагаемой системы управления не требует применения дорогих производительных микроконтроллеров и может быть реализована путем незначительной модификации схемы стандартного устройства.
Сущность изобретения поясняется чертежами, на которых изображено:
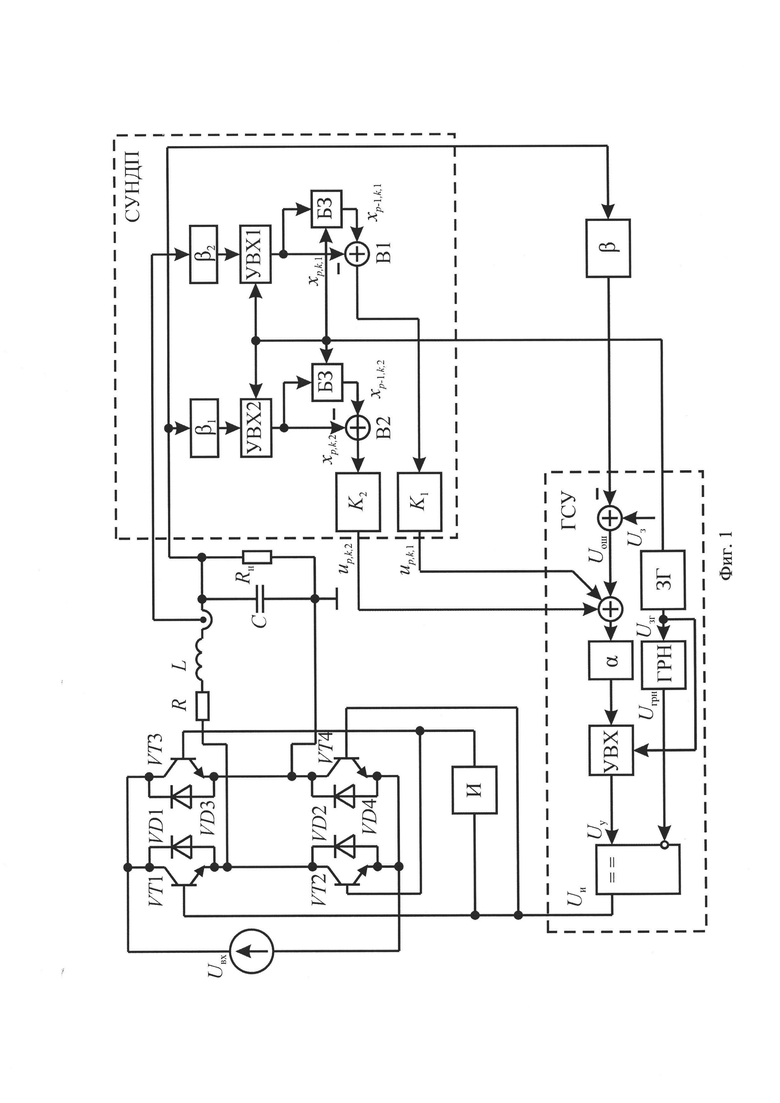
Фиг. 1. Функциональная схема преобразователя с синусоидальной двухполярной реверсивной модуляцией [3] с управлением нелинейными динамическими процессами.
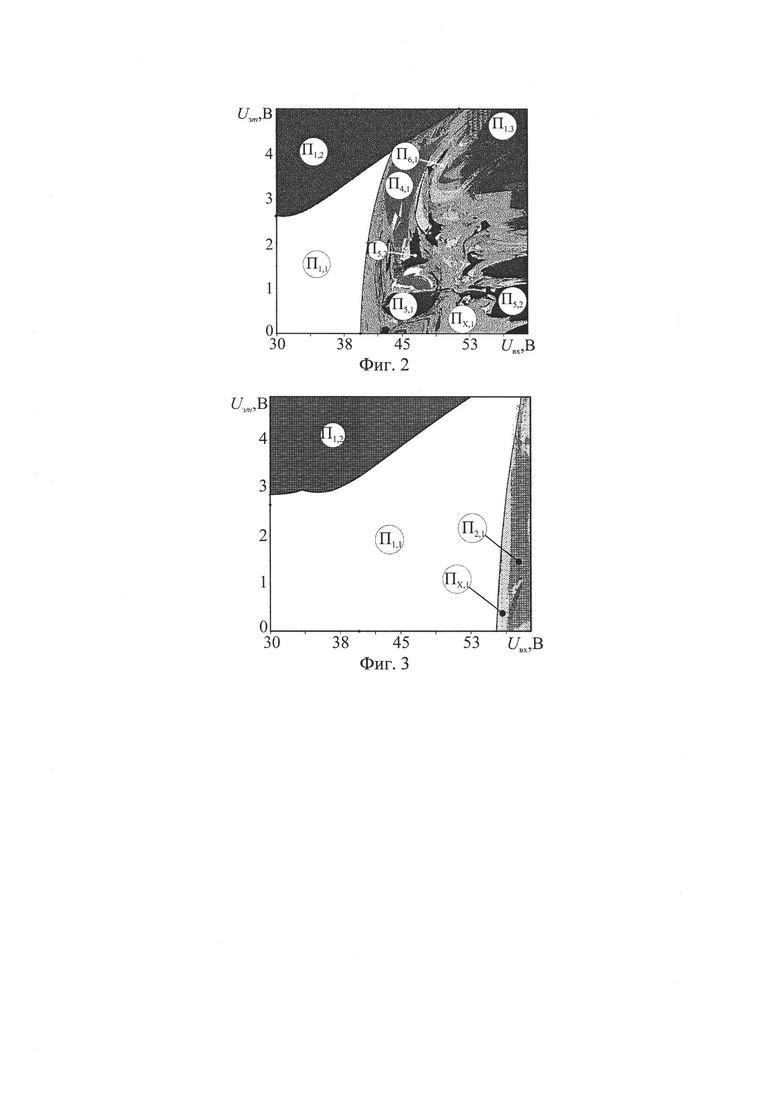
Фиг. 2. Двухпараметрические карты динамических режимов преобразователей с синусоидальной двухполярной реверсивной модуляцией без управления нелинейными динамическими процессами.
Фиг. 3. Двухпараметрические карты динамических режимов преобразователей с синусоидальной двухполярной реверсивной модуляцией с управление нелинейными динамическими процессами.
В системе управления преобразователя (фиг. 1) выделяется две подсистемы: главная подсистема управления (ГПУ), обеспечивающая регулирование по отклонению мгновенного значения выходного переменного синусоидального напряжения; система управления нелинейными динамическими процессами (СУНДП), обеспечивающая подачу корректирующих воздействий на главную подсистему управления с целью стабилизации желаемого динамического режима.
В ГПУ для заведения обратной связи по напряжению используется масштабирующий усилитель с коэффициентом β. Вычитатель вычисляет ошибку по выходному напряжению Uош, которая поступает на пропорциональный регулятор с коэффициентом α. В качестве задания на выходное напряжение используется сигнал Uз, изменяющийся во времени по синусоидальному закону. Сигнал управления после регулятора Uу подается вход сумматора, на второй вход которого поступает сигнал с СУНДП, а выходной сигнал подается на неинвертирующий вход компаратора. На инвертирующий вход компаратора подается развертывающее напряжение Uр от генератора развертывающего напряжения ГРН. Выходные импульсы компаратора Uи управляют силовыми транзисторами в составе мостового преобразователя, при чем на транзисторы VT2, VT3 сигналы управления подаются с выхода инвертора И на вход которого поступает сигнал с компаратора.
На фиг. 1 приняты следующие обозначения: xp,k,i - i-я фазовая переменная в начале k-то тактового интервала p-го периода синусоидального управляющего воздействия; up,k,i - управляющее воздействие по i-й фазовой переменной в начале k-го тактового интервала p-го периода синусоидального управляющего воздействия.
В предлагаемой системе управления не используются предварительно рассчитанные массивы неподвижных точек стробоскопического отображения, а также звено чистого запаздывания. Переменные состояния в виде тока дросселя и напряжения на конденсаторе фиксируются устройствами выборки-хранения УВХ1 и УВХ2 (фиг. 1) в дискретные моменты времени, после чего происходит их масштабирование с коэффициентами β1 и β2 соответственно. УВХ1, УВХ2 тактируются импульсами с тактового генератора ЗГ, который одновременно тактирует генератор опорного напряжения ГРН, обеспечивая синхронную работу данных устройств. Блоки задержки БЗ (фиг. 1) также тактируются задающим генератором ЗГ и обеспечивают задержку на q-тактовых интервалов, т.е. на период выходного напряжения, запоминая переменные состояния в дискретные моменты времени, что снижает требования микроконтроллеру.
Вычитатели В1 и В2 вычисляют отклонения координат k-й дискретной точки на p-м периоде управляющего воздействия от координат k-й дискретной точки на p-1-м периоде управляющего воздействия с умножением полученных разностей, составляющих вектор невязки ΔX=[Δxp,k,1, Δxp,k,1]T=[Δucp,k, ΔiLp,k]T, на коэффициенты К1 и К2 соответственно.
Корректирующие воздействия СУНДП up,k,i определяются по выражению
up,k,i=Kiβi(xp-1,k,i-xp,k,i)=KiβiΔxp,k,i, где i=1, 2, k=1, 2…q,
где q - кратность квантования.
Корректирующие воздействия up,k,i поступая на главную подсистему управления, вызывают изменение коэффициента Δzp,k на k-м тактовом интервале.
Для расчета оптимальных коэффициентов Ki необходимо рассчитать матрицу монодромии в окрестности неподвижной точки желаемого режима X* и выбрать такие коэффициенты Ki при которых старший мультипликатор будет меньше единицы.
Д ля начала рассмотрим математическое описание движений в преобразователей в форме стробоскопического отображения, которое является модификацией [4]

где р - номер итерации отображения системы с внешним периодическим воздействием, Xp,k - значения вектора фазовых переменных в начале k-то тактового интервала p-й итерации отображения.
Введем обозначения



где  n=2… - вектор моментов коммутаций на тактовом интервале в относительном времени при этом zk0=0, zknk=1,
n=2… - вектор моментов коммутаций на тактовом интервале в относительном времени при этом zk0=0, zknk=1,  .
.
Переход от абсолютного времени t к относительному z осуществляется по выражению
Матрицы Ai и вектора VABi в (2) при i=1,2 определяются [4]

 где R - активное сопротивление дросселя, L - индуктивность фильтра, С - емкость фильтра, Uвх - входное напряжение, Rн - сопротивление нагрузки.
где R - активное сопротивление дросселя, L - индуктивность фильтра, С - емкость фильтра, Uвх - входное напряжение, Rн - сопротивление нагрузки.
Переключающая функция для рассматриваемой системы при использовании предлагаемого метода управления с учетом [4] имеет вид

где Xk-1 - значение вектора фазовых переменных в начале k-го тактового интервала; c1=(0 1)T - постоянный вектор, определяющий компоненту вектора переменных состояния, участвующую в выражениях, Uз(z,k)=Uзтsin(ω((k-1)a+za)), где ω=2πƒc, ƒc=1/(qa), при k=1…q - сигнал задания на выходное напряжение.
Момент коммутации на тактовом интервале в относительном времени определяются на основании уравнения многообразия переключения

где ξp,k,n (X, z) - переключающая функция, соответствующая n-му моменту коммутации на k-м тактовом интервале p-й итерации отображения, используя которую определяют момент коммутации zp,k,n (переключающие функции специфичны для каждого преобразователя и будут рассмотрены позднее). При этом, как упоминалось ранее, для всех случаев zp,k,0=0 и zp,k,nk=1.
С целью поиска оптимальных значений Ki рассмотрим отображение

которое отображает вектор неподвижных точек в дискретные моменты времени на р-1 итерации отображения в вектор неподвижных точек в дискретные моменты времени на р-й итерации отображения.
Отображение (4) может быть осуществлено путем итерирования отображения (1). Указанное отображение для линеаризованной в малой окрестности неподвижной точки желаемого режима системы можно представить как

 - матрица линеаризованной системы, рассчитанная в окрестности неподвижной точки желаемого режима (матрица монодромии). Неподвижная точка желаемого режима в рассматриваемой системе может быть найдена по методике [4].
- матрица линеаризованной системы, рассчитанная в окрестности неподвижной точки желаемого режима (матрица монодромии). Неподвижная точка желаемого режима в рассматриваемой системе может быть найдена по методике [4].
Рассчитав матрицу М по выражению (5) с помощью численного дифференцирования с использованием (1) с применением метода оптимизации Нелдера-Мида можно найти такие значения Ki при которых модуль максимального собственного значения матрицы М будет меньше единицы.
Предлагаемая структура системы управления реализуется достаточно большим спектром современных микроконтроллеров.
Для анализа эффективности предлагаемой системы управления было проведено математическое моделирование, которое осуществлялось при следующих параметрах системы: L=0,1 Гн; С=1 мкФ; R=10 Ом; Rн=100 Ом; α=60; β=0,01; Uзт=5 В; Uрт=10 В; a=0,0001 с; К1=-0,9; К2=-0,9; β1=0,01; β2=0,1.
Была построена карта динамических режимов (фиг. 2) в пространстве двух параметров: амплитуды задающего воздействия Uзт и входного напряжения. На карте символами Пij отмечены области существования различных динамических режимов (i - кратность цикла, характерная для данной области, j - номер области с кратностью i на карте). Например, область П1,1 - это первая область существования желаемого режима с частотой колебаний выходного напряжения, равной частоте задающего сигнала (1-цикл) при коэффициентах заполнения на всех тактовых интервалах, укладывающихся на периоде задающего воздействия больше нуля и меньше единицы. Области ПXj - соответствуют областям хаотических колебаний физических величин (m→∞).
Под желаемым динамическим режимом импульсных преобразователей напряжения с синусоидальной широтно-импульсной модуляцией будем понимать такой режим, при котором частота колебаний выходного напряжения равна частоте управляющего сигнала, при этом на каждом тактовом интервале на периоде выходного напряжения коэффициент заполнения должен быть меньше единицы и больше нуля [4].
Как видно (фиг. 2), площадь области желаемого 1-цикла П1,1 в преобразователе с двухполярной реверсивной модуляцией с синусоидальной модуляцией без управления нелинейной динамикой составляет 39,26% от площади карты. Также присутствует нежелательный 1-цикл (П1,2), где имеются нулевые или единичные коэффициенты заполнения на периоде низкочастотного задающего воздействия.
Анализ фиг. 3 показывает, что при использовании управления нелинейными динамическими процессами площадь области желаемого 1-цикла (П1,1) существенно увеличилась (69,14% от площади карты) по сравнению с площадью областью 1-цикла системы без управления нелинейной динамикой (фиг. 2). Как видно из рис. фиг. 3 на карте осталась область нежелательных 1-циклов П1,2, при которых на некоторых тактовых интервалах коэффициент заполнения больше единицы. Данная область является неустранимой. При больших значениях входного напряжения наблюдаются также области нежелательных режимов Пx,1 и П4,1.
Моделирование наглядно показывает эффективность предлагаемого способа управления нелинейной динамикой однофазного инвертора с синусоидальной двухполярной реверсивной модуляцией. Использование данного способа управления не требует применения высокопроизводительных управляющих микроконтроллеров.
Список лтитературы
1. Andriyanov, A.I. Nonlinear dynamics control in single-phase inverter with sinusoidal pulse-width modulation / A.I. Andriyanov, D. Yu. Mikhal'tsov // IOP Conference Series: Materials Science and Engineering, IOP Publishing Ltd. - 2016, - №124, P. 1-7.
2. Hsieh, F.-H. Fast-scale instability phenomena and chaotic control of voltage control single-phase full-bridge inverter via varying load resistance / F.-H. Hsieh, P.-L. Chang, Y.-S. Chen, H.-K. Wang, J.-C. Hwang // 4th IEEE Conference on Industrial Electronics and Applications (ICIEA). - Xian, China: IEEE, 2009. - P. 3422-3427.
3. Кобзев, A.B. Нелинейная динамика полупроводниковых преобразователей / A.B. Кобзев, Г.Я. Михальченко, А.И. Андриянов, С.Г. Михальченко - Томск: Томск. гос. ун-т систем управления и радиоэлектроники, 2007. - 224 с.
4. Андриянов, А.И. Исследование нелинейной динамики импульсных преобразователей напряжения / А.И. Андриянов. - Брянск: БГТУ, 2016. - 187 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ НЕЛИНЕЙНОЙ ДИНАМИКОЙ НЕПОСРЕДСТВЕННОГО ПОНИЖАЮЩЕГО ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ | 2013 |
|
RU2552520C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ В СОСТАВЕ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА В РЕЖИМАХ ПЕРЕГРУЗКИ | 2011 |
|
RU2509336C2 |
| Устройство для решения задач математического программирования | 1981 |
|
SU983717A1 |
| СИСТЕМА СИНУСОИДАЛЬНОЙ ПЕРЕДАЧИ И МЕТОД ФОТОТЕРАПИИ | 2021 |
|
RU2769423C1 |
| СИСТЕМА СИНУСОИДАЛЬНОЙ ПЕРЕДАЧИ И СПОСОБ ФОТОТЕРАПИИ | 2019 |
|
RU2741471C2 |
| СИСТЕМА СИНУСОИДАЛЬНОЙ ПЕРЕДАЧИ И МЕТОД ФОТОТЕРАПИИ | 2015 |
|
RU2709115C2 |
| Способ пространственно-векторной широтно-импульсной модуляции выходного напряжения многоуровневого трехфазного автономного инвертора напряжения | 2023 |
|
RU2818965C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ АВАРИЙНЫХ РЕЖИМОВ ФУНКЦИОНИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЭНЕРГИИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2504064C2 |
| Преобразователь постоянного напряжения | 1989 |
|
SU1663725A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2556874C1 |
Заявленное изобретение относится к преобразовательной технике и может быть использовано при реализации цифровых систем управления однофазными инверторами с синусоидальной широтно-импульсной модуляцией с возможностью исключения опасных колебаний выходного напряжения, возникающих при определенном наборе параметров системы. Предлагается алгоритм для управления нелинейной динамикой, реализуемый за счет того, что импульсы управления на ключи силовой части, состоящей из мостового инвертора и Г-образного LC-фильтра, подает система управления, включающая две подсистемы: главную подсистему, представляющую собой стандартную систему автоматического управления по отклонению и состоящую из вычислителя ошибки, вычисляющего разность между сигналом задания и сигналом обратной связи, усилителя обратной связи с заданным коэффициентом, регулятора, усиливающего сигнал ошибки с заданным коэффициентом, сумматора на один из входов которого подается сигнал после регулятора, а на второй - сигнал от вспомогательной системы управления динамическими процессами, устройства выборки-хранения, которое фиксирует сигнал управления в дискретные моменты времени, выходной сигнал которого подается на компаратор, который сравнивает этот сигнал с развертывающим напряжением, поступающим от специализированного генератора, и формирует управляющие импульсы силовыми ключами, что позволяет обеспечить синусоидальное выходное напряжение высокого качества в широком диапазоне вариации параметров системы; систему управления нелинейными динамическими процессами. При расчете корректирующих воздействий в дискретные моменты в системе управления нелинейными динамическими процессами используются значения фазовых переменных в дискретные моменты на предыдущем периоде низкочастотного процесса, вычитание из которых с помощью вычитателей переменных состояния в дискретные моменты времени на текущем периоде низкочастотного процесса, фиксируемых устройствами выборки-хранения и масштабированных с заданными коэффициентами, формирует вектор невязки, компоненты которого умножаются на заданные коэффициенты, и далее компоненты вектора невязки подаются на сумматор главной подсистемы управления, что позволяет влиять на сигнал ошибки и обеспечивать устойчивость требуемого динамического режима. Техническая реализация предлагаемой системы управления не требует применения дорогих производительных микроконтроллеров и может быть реализована путем незначительной модификации схемы стандартного устройства. 3 ил.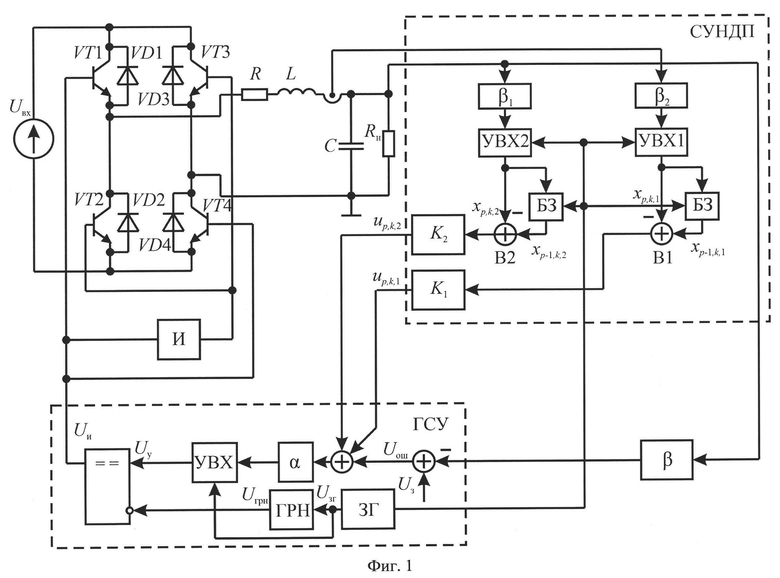
Система управления, реализуемая за счет того, что импульсы управления на ключи силовой части, состоящей из мостового инвертора и Г-образного LC-фильтра, подает система управления, включающая две подсистемы: главную подсистему, представляющую собой стандартную систему автоматического управления по отклонению и состоящую из вычислителя ошибки, вычисляющего разность между сигналом задания и сигналом обратной связи, усилителя обратной связи с заданным коэффициентом, регулятора, усиливающего сигнал ошибки с заданным коэффициентом, сумматора на один из входов которого подается сигнал после регулятора, а на второй - сигнал от вспомогательной системы управления динамическими процессами, устройства выборки-хранения, которое фиксирует сигнал управления в дискретные моменты времени, выходной сигнал которого подается на компаратор, который сравнивает этот сигнал с развертывающим напряжением, поступающим от специализированного генератора, и формирует управляющие импульсы силовыми ключами, что позволяет обеспечить синусоидальное выходное напряжение при дрейфе параметров системы; систему управления нелинейными динамическими процессами, отличающаяся тем, что при расчете корректирующих воздействий в дискретные моменты в системе управления нелинейными динамическими процессами используются значения фазовых переменных в дискретные моменты на предыдущем периоде низкочастотного процесса, вычитание из которых с помощью вычитателей переменных состояния в дискретные моменты времени на текущем периоде низкочастотного процесса, фиксируемых устройствами выборки-хранения и масштабированных с заданными коэффициентами, формирует вектор невязки, компоненты которого умножаются на заданные коэффициенты, и далее компоненты вектора невязки подаются на сумматор главной подсистемы управления, что позволяет влиять на сигнал ошибки и обеспечивать устойчивость требуемого динамического режима.
| Способ равномерного и совершенного минерального покрытия бумаги в процессе ее мелования | 1949 |
|
SU87053A1 |
| Цифровое устройство для управления инвертором напряжения с промежуточным высокочастотным преобразованием | 1986 |
|
SU1557653A2 |
| Устройство для управления автономным инвертором напряжения со слежением | 1984 |
|
SU1229931A1 |
| US 5506765 A, 09.04.1996. | |||

