Предложенный способ относится к электротехнике, а именно к способам управления импульсными преобразователями постоянного напряжения, которые широко применяются как источники вторичного электропитания различных устройств, способ может быть использован для прогнозирования аварийных режимов в ходе функционирования указанных устройств.
Известен способ управления импульсным преобразователем постоянного напряжения со стабилизацией предельного тока, согласно которому выходной ШИМ-сигнал управления регулирующим элементом преобразователя получают в результате конъюнкции двух ШИМ-сигналов, первый из которых формируют на основе сигнала рассогласования по напряжению, а второй - на основе сигнала рассогласования по току. При этом уровень сигнала рассогласования по току корректируется в зависимости от значения демодулированного выходного ШИМ-сигнала управления регулирующим элементом [1].
Недостатком способа является то, что он позволяет идентифицировать только среднее значение стабилизируемого тока, которое является одной из составляющих, характеризующих аварийный режим работы преобразователя, соответственно, основанная на этой идентификации стабилизация не может полностью гарантировать исключение этих режимов.
Известен способ управления импульсным стабилизатором тока, согласно которому измеряют текущее значение стабилизируемого тока, сравнивают его с заданным значением, формируют ШИМ-сигнал управления инвертором, трансформируют переменное напряжение с выхода инвертора, выпрямляют и сглаживают выходной ток [2].
Недостатком способа является то, что он позволяет перед трансформацией тока идентифицировать только его амплитуду, которая является одной из составляющих, характеризующих аварийный режим работы преобразователя, соответственно, основанная на этой идентификации стабилизация не может полностью гарантировать исключение аварийных режимов.
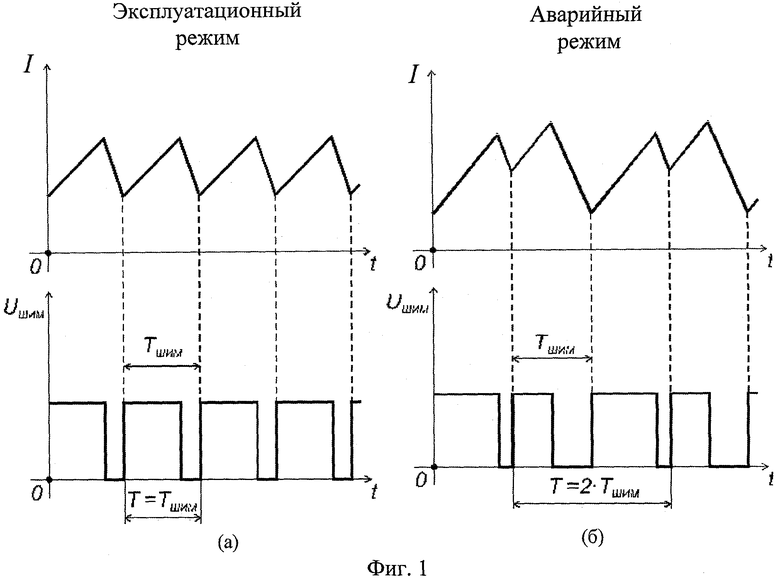
Существуют аварийные режимы работы импульсного преобразователя, когда происходит изменение как частотных, так и пульсационных характеристик эксплуатационного режима (фиг.1), что приводит к наиболее существенным негативным последствиям, как для преобразователя, так и для сопряженных с ним систем. Источником данных аварийных режимов являются нелинейные явления [3], в результате которых после т.н. бифуркации реализовываются различные сценарии эволюции динамики. Анализ недостатков обоих способов позволяет сделать заключение, что их основная причина связана с использованием традиционной усредненной модели импульсного преобразователя [4], в которой отображение нелинейных явлений в принципе исключено из рассмотрения.
Наиболее близкой к изобретению по технической сущности является фрактальный метод идентификации динамики [5], согласно которому для отображения динамики предложено пространство, координаты которого представляют собой пульсационные характеристики временных рядов переменных состояния, в этом пространстве на основе предварительных вычислений с использованием нелинейной модели импульсного преобразователя формируется структура образов стационарного процесса при вариации параметров в заданных диапазонах, которая позволяет сопоставить пульсационным характеристикам процесса значения параметров, далее в ходе функционирования импульсного преобразователя измеряются пульсационные характеристики и в упомянутое пространство отображается образ текущего стационарного процесса, далее, исходя из предварительно выявленной взаимосвязи пульсационных характеристик и значений параметров вычисляются текущие параметры импульсного преобразователя, далее на основе анализа тренда образов стационарных процессов оценивается направление эволюции динамики.
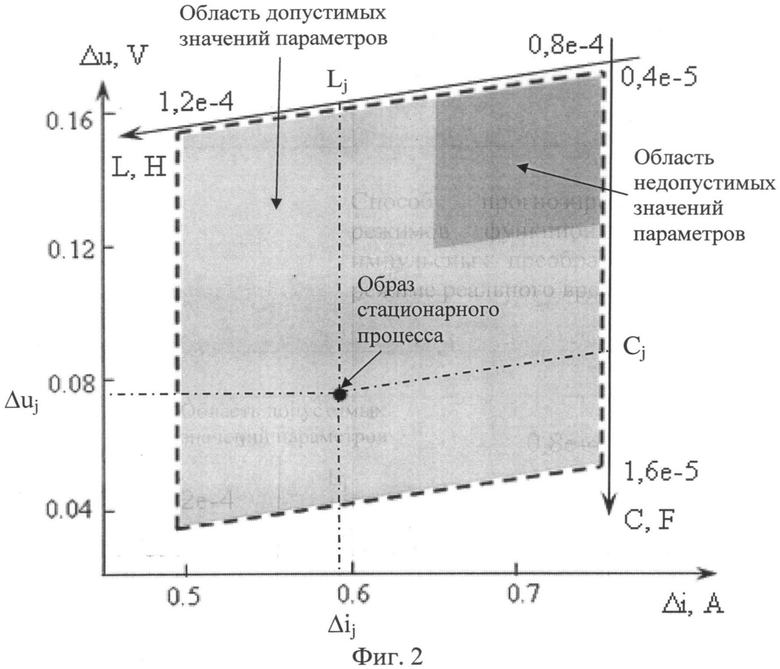
Вариант реализации метода [5] для идентификации в реальном времени недопустимой вариации параметров импульсного преобразователя предложен в полезной модели [6]. В этой модели для отображения динамики используется пространство, координаты которого представляют собой пульсации временных рядов тока дросселя (Δi) и выходного напряжения (Δu) в силовом контуре импульсного преобразователя напряжения, на основе предварительных вычислений с использованием нелинейной модели этого преобразователя в системе координат (Δi, Δu) формируется структура образов эксплуатационного процесса при вариации эквивалентных значений емкости (С) и индуктивности (L) в их объективно возможных диапазонах, что позволяет сопоставить паре значений (LC) пару значений (Δi, Δu), далее в пространстве (Δi, Δu) выделяется область существования эксплуатационного режима с гарантированным запасом устойчивости (фиг.2, светло-серая область), когда параметры (LC) обеспечивают в параметрическом пространстве заданное расстояние от текущего состояния до бифуркационной границы эксплуатационного режима, далее в ходе функционирования импульсного преобразователя в пространство (Δi, Δu) отображается образ стационарного процесса (фиг.2, черная точка), в случае принадлежности этого образа к области недопустимых значений параметров (фиг.2, темно-серая область) идентифицируется аварийный режим работы преобразователя. Этот способ идентификации принимается за прототип.
В прототипе принимаются во внимание нелинейные свойства импульсного способа преобразования энергии. Кроме того, специальная форма представления эксплуатационного режима импульсного преобразователя наглядно отображает происходящие качественные изменения в ходе его функционирования, в частности, позволяет относительно формального признака - границы области допустимых значений параметров - оценивать текущее состояние системы и направление эволюции динамики. Этот анализ является понятным для использования при визуальном анализе человеком, однако, логически обоснованное формальное правило оценки времени до начала аварийного режима отсутствует. Этот недостаток затрудняет алгоритмизацию процесса прогнозирования и препятствует повышению эффективности управления, соответственно, снижает надежность и безопасность функционирования ШИМ-преобразователей.
Технической задачей изобретения является повышение степени алгоритмизации процесса прогнозирования аварийных режимов широтно-импульсных преобразователей энергии, направленное на практическое применение для повышения надежности и безопасности их функционирования.
Для иллюстрации решения задачи рассмотрим пример, наиболее актуальный с практической точки зрения. Тенденции развития современных импульсных преобразователей связаны с расширением областей их применения и усложнением условий эксплуатации. Это означает увеличение числа варьируемых параметров и диапазонов их объективно возможных значений. Для их диагностики должна использоваться соответствующая система датчиков, а также устройство для сопряжения и обработки получаемых данных, что повышает массогабаритные показатели и стоимость преобразователя, а также в целом усложняет его состав и структуру. В тоже время, например, датчик измерения напряжения (u) на выходе преобразователя напряжения является частью традиционной системы управления и, соответственно, предпочтительной является возможность мониторинга С на основе данных измерений u. Требование непрерывности этого мониторинга обусловлено неустранимостью естественной деградации элементов, приводящей к неопределенности значения С. Однако для реализации этого мониторинга требуется возможность автоматической оценки направления эволюции динамики и прогнозирования срока достижения предельно допустимого значения пульсаций ΔUmax, приводящего к аварийному режиму преобразователя.
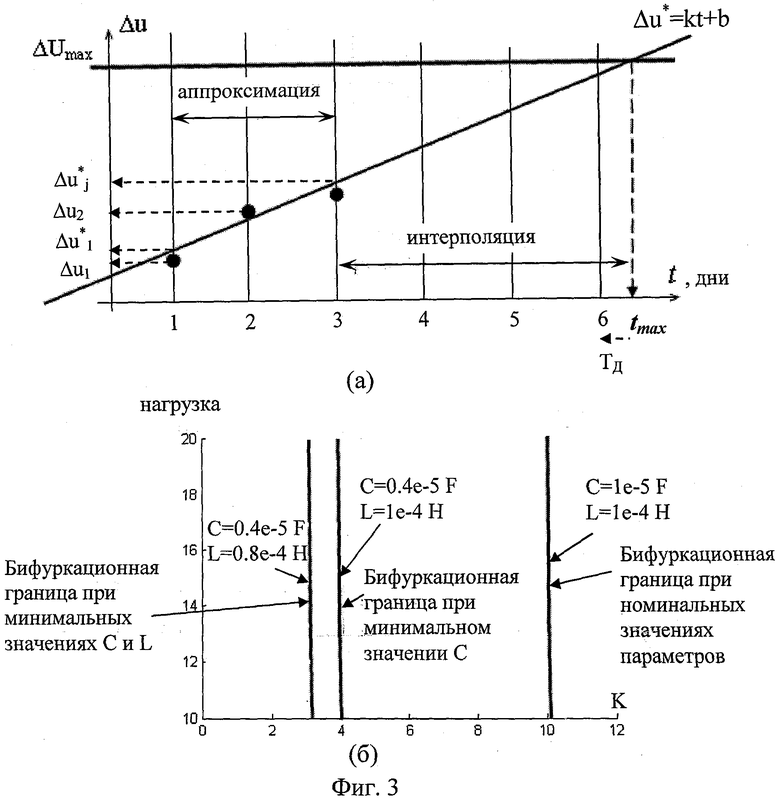
В заявленном способе для решения технической задачи предлагается ввести дополнительную координату времени (t) в пространство (Δi, Δu) и использовать проекцию (t, Δu) или (t, Δi) для отображения тренда образов эксплуатационного процесса (фиг.3а). Заметим, что деградация параметров элементов характеризуется следующей особенностью - она носит однонаправленный характер и переменную скорость, но закономерность изменения этой скорости является неизвестной. С учетом этой особенности предлагается следующая последовательность операций: заполнение массива данных (tj, Δuj), где j - номер элемента текущего измерения; выполнение линейной аппроксимации этого массива прямой Δu*(t) в диапазоне [t1, tj] и ее интерполяции в диапазоне [tj, tmах], где tmax - момент пересечения прямой уровня ΔUmax (фиг.3а); вычисление предварительного момента достижения аномального значения уровня пульсаций ТД=(tj-t1)(ΔUmax-Δu* j)/(Δu* j-Δu * 1), где Δu* j=Δu*(tj); вычисление прогнозируемого момента достижения аномального значения уровня пульсаций (Тпрогноз) посредством умножения Тд на некоторый коэффициент N, учитывающий влияние второй реактивной составляющей, и округление полученного результата до "целого в направлении нуля".
Необходимость введения коэффициента N обусловлена тем, что в зависимости от того, какой сигнал на выходе преобразователя поступает на регулятор (ток или напряжение), используется соответствующий датчик в системе управления. Поскольку способ предполагает минимальное изменение уже имеющихся состава и структуры системы управления, то на практике можно получить зависимости только для одной из пар - либо (Δi, L), либо (Δu, С). В этой связи возникает вопрос: как учесть взаимное влияние вариации обоих параметров? Будем учитывать, что максимальное сокращение области эксплуатационного процесса происходит при минимальных значениях реактивных сопротивлений. Будем называть «основным» параметр, который соответствует измеряемой переменной состояния, второй будем называть «дополнительным». Для вычисления коэффициента N предварительно вычисляется значение параметра регулятора K1биф, при котором реализуется бифуркационное явление исходя из условия, что значение основного эквивалентного параметра является минимальным из диапазона допустимых значений, далее вычисляется значение параметра регулятора K2биф, при котором реализуется бифуркационное явление исходя из условия, что значения и основного и дополнительного эквивалентного параметров являются минимальными. В результате N=(Kбиф-K2биф)/(Kбиф-K1биф)≥1, где Kбиф - значение параметра регулятора, при котором реализуется бифуркационное явление при номинальных значениях параметров.
Сущность заявленного способа прогнозирования аварийных режимов функционирования широтно-импульсных преобразователей энергии в режиме реального времени заключается в том, что путем предварительных исследований с использованием нелинейной модели широтно-импульсного преобразователя энергии определяется аварийное значение амплитуды пульсаций напряжения на выходе преобразователя исходя из зависимости местоположения границы устойчивости эксплуатационного режима от параметров силовых конденсаторов и зависимости амплитуды пульсаций напряжения на выходе преобразователя от параметров силовых конденсаторов. При функционировании преобразователя измеряется текущая амплитуда пульсаций напряжения на его выходе, результат запоминается. Отличающийся тем, что дополнительно путем предварительных исследований на основе использования нелинейной модели широтно-импульсного преобразователя энергии определяются: коэффициент, учитывающий наихудший вариант совместного влияния индуктивности в силовой цепи преобразователя и силовых конденсаторов на амплитуду пульсаций на выходе преобразователя; время в периодах широтно-импульсной модуляции между последовательными измерениями амплитуды пульсаций напряжения на выходе преобразователя, которое минимально требуется для распознания изменения результатов этих измерений. После каждого очередного измерения амплитуды пульсаций напряжения на выходе преобразователя, определяется изменение этой амплитуды по отношению к значению, находящемуся в памяти. Полученный результат изменения амплитуды пульсаций корректируется с использованием ранее упомянутого коэффициента. Откорректированное изменение амплитуды пульсаций сопоставляется с аварийным значением амплитуды пульсаций напряжения на выходе преобразователя, на основании этого сопоставления с учетом одинакового времени между последовательными измерениями амплитуды пульсаций прогнозируется момент достижения аварийного значения амплитуды пульсаций, приводящий к аварийному режиму. Прогнозирование повторяется после выполнения каждого нового измерения амплитуды пульсаций напряжения на выходе преобразователя.
На фиг.1 представлены схемы синхронизированных временных рядов тока дросселя (I) и сигнала ШИМ (UШИМ), которые поясняет различия между двумя качественно различными состояниями преобразователя. В первом случае (а) проиллюстрирован эксплуатационный режим, период которого равен ТШИМ. Во втором случае (б) проиллюстрирован аварийный режим, период которого равен 2ТШИМ и амплитуда пульсаций в той или иной степени превышает амплитуду пульсаций эксплуатационного режима.
На фиг.2 приведены результаты численного моделирования областей допустимых и недопустимых значений эквивалентных реактивных параметров в системе координат (Δi, Δu), а также принцип определения в нем соответствия между парами значений (LC) и (Δi, Δu) для образа стационарного процесса.
На фиг.3. представлены (а) схема, поясняющая идею прогнозирования в заявленном способе, а также (б) результат численного моделирования смещения бифуркационной границы при варьировании параметров L и С.
На фиг.4 приведен пример структурной схемы устройства, которое может быть использовано для реализации заявленного способа. Устройство содержит последовательно соединенные задающее устройство 1, устройство сравнения 2, ШИМ-регулятор 3, силовую подсистему 4, пиковый детектор 5, подсистему идентификации 6 и дисплей 7, при этом второй выход силовой подсистемы 4 соединен со вторым входом устройства сравнения 2, второй выход ШИМ-регулятора 3 соединен со вторым входом подсистемы прогнозирования 6.
Устройство на фиг.4 работает следующим образом. Значение выходного напряжения (UВЫХ) из силовой подсистемы (поз.4) с помощью устройства сравнения (поз.2) вычитается из значения уставки (Uy), заданного задающим устройством (поз.1), сформированный сигнал ошибки (δ) поступает в ШИМ-регулятор (поз.3), где в соответствии с алгоритмом ШИМ формируется управляющий сигнал, который после усиления (KF) воздействует на ключевой элемент силовой подсистемы (поз.4). Пиковый детектор (поз.5) определяет значения минимума (Umin) и максимума (Umax) выходного напряжения, поступающего с объекта управления (поз.4). Блок прогнозирования (поз.6) измеряет j-e значения минимума (Umin j) и максимума (Umax j) выходного напряжения в моменты, определенные пиковым детектором (поз.5), далее вычисляет j-e значение пульсаций напряжения Δuj=Umax j-Umin j и, в соответствии с заявленным способом, вычисляет прогнозируемый момент достижения предельно допустимого уровня пульсаций (Тпрогноз). На дисплее (поз.7) отображается протокол, содержащий дату, время и результат прогноза.
Например, пусть в течение трех дней выполнено 3 измерения (фиг.2а). Пусть, как было пояснено ранее, на основе аппроксимации и интерполяции прямой Δu*(t) с последующим вычислением ТД установлено, что достижение аварийного режима прогнозируется не ранее, чем на 6-й день. Поясним определение коэффициента N. С этой целью на основе предварительных вычислительных экспериментов на нелинейной модели импульсного преобразователя постоянного напряжения получаем (фиг.3б), что при номинальных значениях параметров L и С бифуркационная граница проходит при Kбиф=10,1, в случае минимально допустимого значения параметра С бифуркационная граница проходит при К1биф=4, а в случае минимально допустимых значений параметров С и L бифуркационная граница проходит при K2биф=3,1. Таким образом, N=1.15 и Тпрогноз=6,9. В результате прогнозируется возможность реализации аварийного режима через 3 дня и соответствующее сообщение поступает на экран дисплея (фиг.4, поз.7).
Таким образом, в отличие от прототипа, момент начала аварийного режима прогнозируется заранее, и с этой целью в системе управления не предусматривается использование дополнительных датчиков. Влияние обеих реактивных составляющих нагрузки учитывается эмпирическим коэффициентом, отображающим нелинейность динамики импульсных преобразователей энергии, и учитывающим наихудший вариант совместного влияния этих составляющих. Введение последовательности формализованных операций позволяет полностью алгоритмизировать процесс прогнозирования начала аварийного режима в широтно-импульсных преобразователях энергии. В практическом приложении это позволяет реализацию способа в режиме реального времени на элементной базе типовых микроконтроллеров, вследствие использования простых математических операций. Таким образом, способ предоставляет возможность в автоматическом режиме распознавать аварийные режимы, и тем самым повысить надежность и безопасность функционирования широтно-импульсных преобразователей энергии.
Источники информации
1. Способ управления импульсным преобразователем постоянного напряжения со стабилизацией предельного тока [Текст] : пат. на способ №2249842, Рос. Федерация: МПК G05F 1/10, G05F 1/66 С.П. Черданцев, К.Г. Гордеев, Ю.А. Шиняков, К.В. Тараканов; заявитель и патентообладатель Федеральное государственное унитарное предприятие "Научно-производственный центр "Полюс": - № 2003114596/09; заявл. 05.16.2003; опубл. 04.10.2005.
2. Способ управления импульсным стабилизатором тока [Текст] : пат. на способ № 2366067, Рос. Федерация: МПК H02M 3|335 В.Е. Балахонцев, А.И. Заико, В.Н. Зелепукин; заявитель и патентообладатель Федеральное государственное унитарное предприятие Уфимское научно-производственное предприятие "Молния": - 2008114539/09; заявл. 14.04.2008; опубл. 27.08.2009.
3. Banerjee S. Nonlinear phenomena in power electronics: attractors, bifurcations, chaos and nonlinear control / S.Banerjee, G.Verghese. - New York: IEEE Press, 2001. - 441 p.
4. Мелешин В.И. Получение непрерывной линейной модели силовой части импульсного преобразователя как начальный этап проектирования его динамических свойств // Электричество. 2002. № 10. С. 38-43.
5. Kolokolov Yu., Monovskaya A., Hamzaoui A. On-line identification of multidimensional parametric vector random variation of pulse system. // Chaos, Solitons & Fractals, 2005, V.24, Issue 3, pp. 825-838.
6. Система адаптивного управления импульсным преобразователем напряжения на основе использования идентификации аномальной вариации параметров в режиме реального времени [Текст] : пат. на полезную модель №88870, Рос. Федерация: МПК H02M 3/02 Ю.В. Колоколов, А.В. Моновская, А.с. Кузьмин; заявитель и патентообладатель Югорский государственный университет: - № 2009129609/22; заявл. 31.07.09; опубл. 20.11.2009 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ АВАРИЙНЫХ РЕЖИМОВ ФУНКЦИОНИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЭНЕРГИИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2479086C2 |
| СПОСОБ КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК И КОРРЕКЦИИ КОЭФФИЦИЕНТА МОЩНОСТИ СЕТИ | 2008 |
|
RU2354025C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| УСТРОЙСТВО И СПОСОБ ПОДАЧИ МОЩНОСТИ В ПЕРЕКЛЮЧАЕМОМ РЕЖИМЕ | 2011 |
|
RU2571393C2 |
| Способ управления фильтрокомпенсирующим устройством при нестационарных нелинейных нагрузках и устройство для его осуществления | 2021 |
|
RU2776423C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ СЕКЦИОНИРОВАННОЙ СОЛНЕЧНОЙ БАТАРЕИ В АВТОНОМНОЙ СИСТЕМЕ ЭЛЕКТРОСНАБЖЕНИЯ | 2006 |
|
RU2308797C1 |
| УСТРОЙСТВО ОБОГРЕВА | 2012 |
|
RU2508465C1 |
| ДРАЙВЕР ДЛЯ СВЕТОДИОДНОГО СВЕТИЛЬНИКА | 2020 |
|
RU2735022C1 |
| УСИЛИТЕЛЬ МОЩНОСТИ | 1991 |
|
RU2022450C1 |
| ПЕРЕДАЮЩИЙ ТРАКТ ДЛЯ ВОЗБУЖДЕНИЯ ГИДРОАКУСТИЧЕСКОЙ АНТЕННЫ | 2019 |
|
RU2723463C1 |
Изобретение относится к способам управления импульсными преобразователями постоянного напряжения. Технический результат повышение степени алгоритмизации процесса прогнозирования аварийных режимов широтно-импульсных преобразователей энергии. Способ заключается в том, что путем предварительных исследований с использованием нелинейной модели широтно-импульсного преобразователя энергии определяются: аварийное значение амплитуды пульсаций напряжения на выходе преобразователя; время в периодах широтно-импульсной модуляции между последовательными измерениями амплитуды пульсаций напряжения на выходе преобразователя, которое минимально требуется для распознания изменения результатов этих измерений; коэффициент, учитывающий наихудший вариант совместного влияния индуктивности в силовой цепи преобразователя и силовых конденсаторов на амплитуду пульсаций на выходе преобразователя. При функционировании преобразователя измеряется текущая амплитуда пульсаций напряжения на его выходе, результат запоминается. После каждого очередного измерения амплитуды пульсаций напряжения на выходе определяется изменение этой амплитуды по отношению к значению, находящемуся в памяти. Полученный результат корректируется с использованием ранее упомянутого коэффициента. Откорректированное изменение сопоставляется с аварийным значением, на основании этого сопоставления прогнозируется момент достижения аварийного значения амплитуды пульсаций, приводящий к аварийному режиму. Прогнозирование повторяется после выполнения каждого нового измерения амплитуды пульсаций напряжения на выходе преобразователя. 4 ил.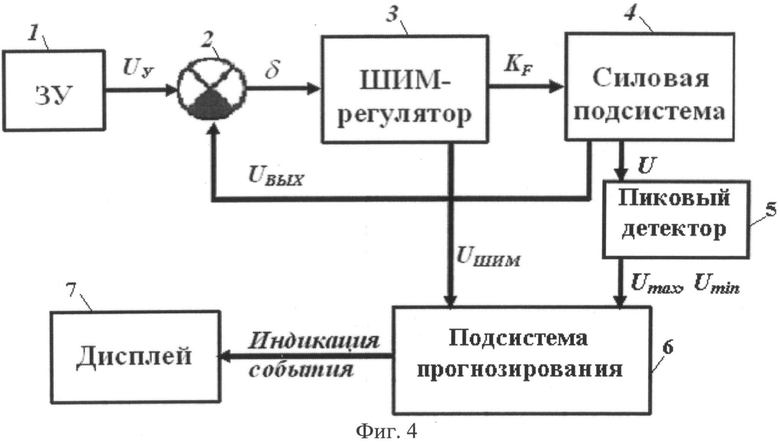
Способ прогнозирования аварийных режимов функционирования широтно-импульсных преобразователей энергии в режиме реального времени, заключающийся в том, что путем предварительных исследований с использованием нелинейной модели широтно-импульсного преобразователя энергии определяется аварийное значение амплитуды пульсаций напряжения на выходе преобразователя исходя из зависимости местоположения границы устойчивости эксплуатационного режима от параметров силовых конденсаторов и зависимости амплитуды пульсаций напряжения на выходе преобразователя от параметров силовых конденсаторов; при функционировании преобразователя измеряется текущая амплитуда пульсаций напряжения на его выходе, результат запоминается, отличающийся тем, что дополнительно путем предварительных исследований на основе использования нелинейной модели широтно-импульсного преобразователя энергии определяются: коэффициент, учитывающий наихудший вариант совместного влияния индуктивности в силовой цепи преобразователя и силовых конденсаторов на амплитуду пульсаций на выходе преобразователя; время в периодах широтно-импульсной модуляции между последовательными измерениями амплитуды пульсаций напряжения на выходе преобразователя, которое минимально требуется для распознания изменения результатов этих измерений после каждого очередного измерения амплитуды пульсаций напряжения на выходе преобразователя, определяется изменение этой амплитуды по отношению к значению, находящемуся в памяти; полученный результат изменения амплитуды пульсаций корректируется с использованием ранее упомянутого коэффициента; откорректированное изменение амплитуды пульсаций сопоставляется с аварийным значением амплитуды пульсаций напряжения на выходе преобразователя, на основании этого сопоставления с учетом одинакового времени между последовательными измерениями амплитуды пульсаций прогнозируется момент достижения аварийного значения амплитуды пульсаций, приводящий к аварийному режиму, прогнозирование повторяется после выполнения каждого нового измерения амплитуды пульсаций напряжения на выходе преобразователя.
| Всплывающий буй | 1950 |
|
SU88869A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2003 |
|
RU2249842C2 |
| US 200501681 A1, 04.08.2005. | |||

