Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственной рабочей машине с признаками, раскрытыми в ограничительной части пункта 1 формулы, а также к способу управления сельскохозяйственной рабочей машиной с признаками, раскрытыми в ограничительной части пункта 15 формулы.
Уровень техники
Под описываемой сельскохозяйственной рабочей машиной можно понимать любую сельскохозяйственную рабочую машину, используемую для сельскохозяйственных рабочих процессов и оснащенную несколькими рабочими органами, а также системой помощи водителю для управления рабочими органами. К таким машинам относятся тягачи, в частности тракторы, самоходные уборочные машины, в частности кормоуборочный комбайн, зерноуборочный комбайн и т.п. В данном изобретении рассмотрена рабочая машина, выполненная в виде зерноуборочного комбайна.
Сельскохозяйственная рабочая машина, выполненная в виде зерноуборочного комбайна, служит для скашивания и обмолота зерновых культур. При этом обмолот осуществляют посредством молотильного аппарата, в который поступает срезанная жаткой комбайна убираемая зерновая культура, которая после обмолота проходит сепарацию и последующую очистку, после чего поступает в зерновой бункер. После этого обычно остаются другие составляющие убираемой культуры, в частности мякина и солома, которые распределяют по полю или которые, в случае соломы, могут быть уложены валком для последующего захвата пресс-подборщиком. Здесь и далее под «убираемой культурой» понимают весь поступающий из молотильного аппарата поток культуры, состоящий из зерна, не извлеченного из убираемой культуры, а также зерна, которое может остаться в потоке убираемой культуры в качестве потерь и быть смешано с соломой.
В молотильном аппарате зерно извлекают из соломы посредством трения (обмолачивают) и отделяют от остального потока убираемой культуры, что позволяет подавать его непосредственно на очистное устройство. Оставшийся поток убираемой культуры поступает в зону сепарации, в которой оставшееся зерно отделяют от потока убираемой культуры, например, посредством соломотряса, а затем также подают на очистное устройство.
В настоящее время существует целый ряд критериев качества, на основании которых может быть оценено качество рабочего процесса, в данном случае процесса уборки урожая. Во-первых, необходимо по возможности извлечь все зерна из потока убираемой культуры и направить их в зерновой бункер, при этом содержание дробленых зерен (битого зерна) и мелких прочих частиц в зерне должно быть сведено к минимуму. Во-вторых, солома не должна быть настолько сильно повреждена, например разрезана, что это затрудняет ее последующее использование. В-третьих, необходимо свести к минимуму время, затрачиваемое на обработку поля, или расходуемое топливо. Могут быть предусмотрены и другие критерии качества. В зависимости от общей ситуации, в частности соответствующих экономических условий, на передний план выходят различные критерии качества, сочетание которых формирует стратегию рабочего процесса, в данном случае стратегию процесса уборки урожая, регламентирующую рабочий процесс, в данном случае процесс уборки урожая.
Выполнение вышеуказанных критериев качества предполагает соответствующее управление молотильным аппаратом и другими рабочими органами комбайна. Для этого предусмотрена система помощи водителю, осуществляющая управление рабочими органами в соответствии по меньшей мере с одной определяемой пользователем стратегией рабочего процесса, направленной на выполнение по меньшей мере одного критерия качества.
Известная из уровня техники сельскохозяйственная рабочая машина (ЕР 2220926 В1), служащая основой изобретения, содержит подобную систему помощи водителю. Система помощи водителю содержит графический интерфейс пользователя, посредством которого пользователь может задавать по меньшей мере часть стратегии рабочего процесса. Для этого пользователь может указать требуемые критерии качества для стратегии процесса работы посредством коммуникации на естественном языке. Если пользователь задает конкурирующие критерии качества, которые не могут быть выполнены одновременно, система помощи водителю реагирует, предпочтительно выдавая соответствующее предупреждение.
Известная из уровня техники сельскохозяйственная рабочая машина посредством своей системы помощи водителю позволяет интуитивно вводить стратегию рабочего процесса в несколько этапов. Недостаток этого решения заключается в том, что ввод конкурирующих критериев качества может потребовать дополнительных этапов ввода, если такие критерии качества не могут быть выполнены одновременно.
Раскрытие сущности изобретения
Задачей изобретения является усовершенствование известной из уровня техники сельскохозяйственной рабочей машины таким образом, чтобы упростить ввод пользователем стратегии рабочего процесса.
Эта задача решена сельскохозяйственной рабочей машиной согласно ограничительной части пункта 1 формулы изобретения с признаками, раскрытыми в отличительной части пункта 1 формулы.
Основная идея заключается в том, что конкурирующие критерии качества, которые сами по себе не могут быть выполнены одновременно, введены в стратегию рабочего процесса с учетом соотнесения их значимости в соответствии с переменной значимости, причем переменная значимости визуализирована посредством виртуального элемента управления графического интерфейса пользователя и может быть задана пользователем. Таким образом, пользователь, по существу, ограничен в задании критериев качества, так как изменение переменной значимости всегда приводит к встречным изменениям значимости конкурирующих критериев качества. Однако это также целесообразно, поскольку конкурирующие критерии качества в любом случае не могут быть выполнены одновременно. В результате исчезает необходимость в реализованном в уровне техники выводе предупреждения в случае задания критериев качества, которые на практике не могут быть реализованы. Это позволяет, в частности, ускорить задание стратегии рабочего процесса пользователем.
По существу, можно предусмотреть несколько переменных значимости, каждой из которых назначены конкурирующие критерии качества. В особенно предпочтительном варианте осуществления (пункт 2 формулы) каждая пара конкурирующих критериев качества назначена одной переменной значимости. По существу, также возможен вариант, в котором одной переменной значимости назначены несколько критериев качества, в частности три критерия качества, в некоторой степени конкурирующие друг с другом.
Особенно предпочтительные варианты осуществления (пункты 4 и 5 формулы) позволяют особенно удобно задавать соответствующую переменную значимости. В варианте осуществления, предусмотренном пунктом 5 формулы, под элементом управления понимают виртуальный ползунок или виртуальный поворотный регулятор, который может быть настроен пользователем. В данном случае регулирование выполняют предпочтительно посредством операции перетаскивания, описываемой в пункте 4 формулы. Для этого графический интерфейс пользователя предпочтительно реализован в виде сенсорного дисплея.
Следующие предпочтительные варианты осуществления, описываемые пунктами 7-11 формулы, относятся к использованию предложенного технического решения в рабочей машине, выполненной в виде зерноуборочного комбайна. В зерноуборочном комбайне большая часть критериев качества конкурируют друг с другом. В качестве примера можно привести критерий максимизации обмолота, который может быть достигнут агрессивным управлением молотильного аппарата. Однако агрессивное управление связано со значительным риском увеличения доли битого зерна. Таким образом, критерии максимизации обмолота и минимизации доли битого зерна являются конкурирующими критериями качества в указанном выше смысле.
В особенно предпочтительном варианте осуществления, описываемом пунктом 12 формулы, система помощи водителю адаптирует графический интерфейс пользователя к конфигурации машины и/или конфигурации системы управления, и/или состоянию рабочего процесса. В зависимости от текущего положения дел система помощи водителю визуализирует различные конкурирующие критерии качества, что позволяет пользователю задавать только те критерии качества, которые имеют отношение к соответствующему текущему положению дел.
Другой вариант (пункт 15 формулы), имеющий самостоятельное значение, описывает собственно способ управления предлагаемой сельскохозяйственной рабочей машиной.
Согласно этому способу конкурирующие критерии качества вводят в стратегию рабочего процесса с учетом соотнесения их значимости в соответствии с переменной значимости, причем переменная значимости визуализируется посредством виртуального элемента управления графического интерфейса пользователя и задается пользователем. Для раскрытия предложенного способа может быть сделана ссылка на все варианты осуществления предложенной сельскохозяйственной рабочей машины.
Краткое описание чертежей
Изобретение детально раскрыто ниже на основании вариантов осуществления, представленных на фигурах. На фигурах изображено:
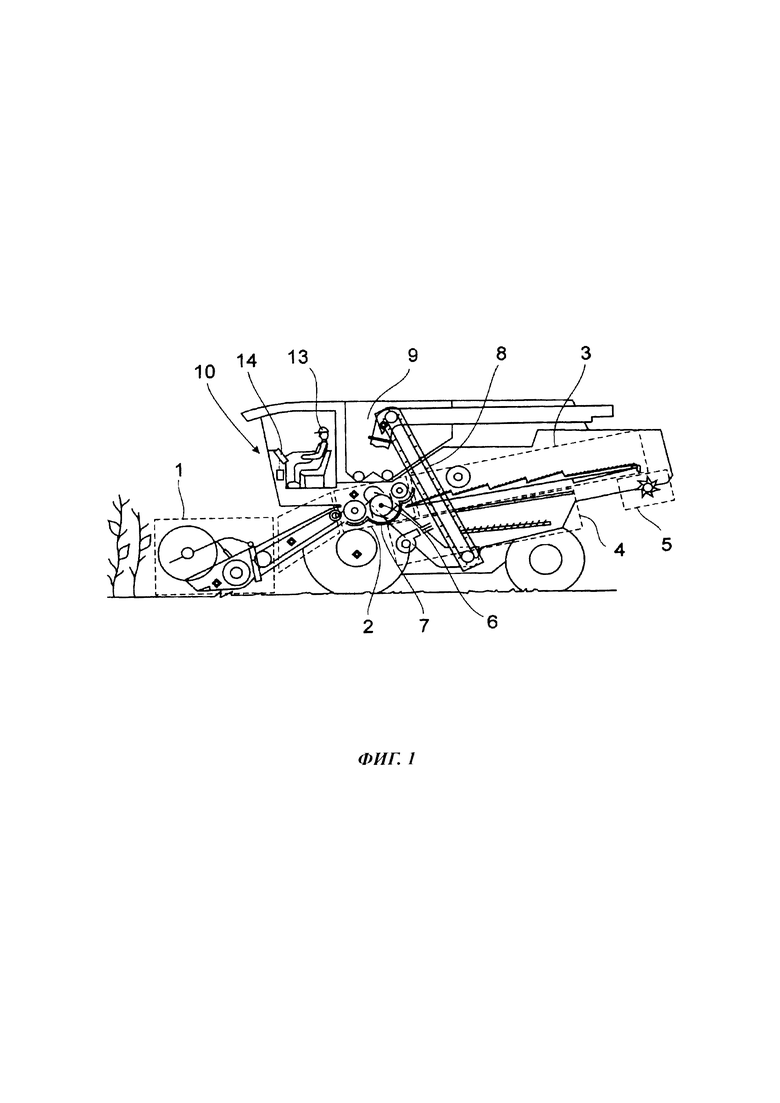
фигура 1 - схематичное изображение сельскохозяйственной рабочей машины, описываемой изобретением;
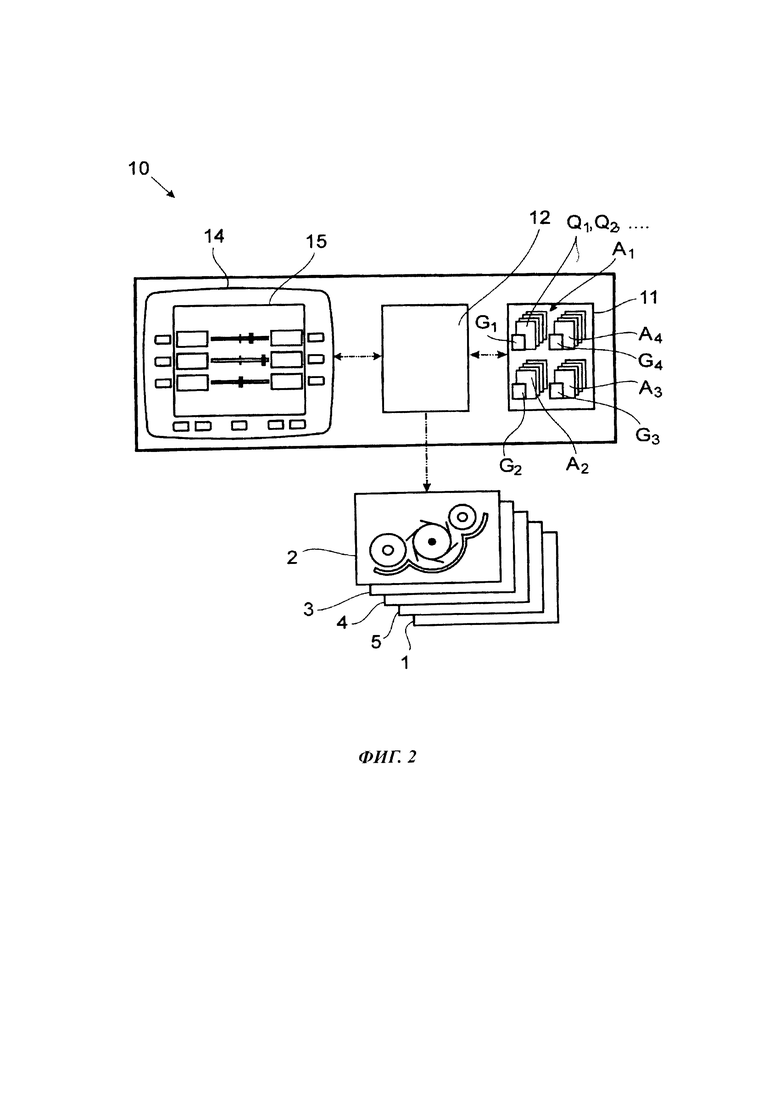
фигура 2 - схематичное изображение системы помощи водителю рабочей машины, показанной на фигуре 1;
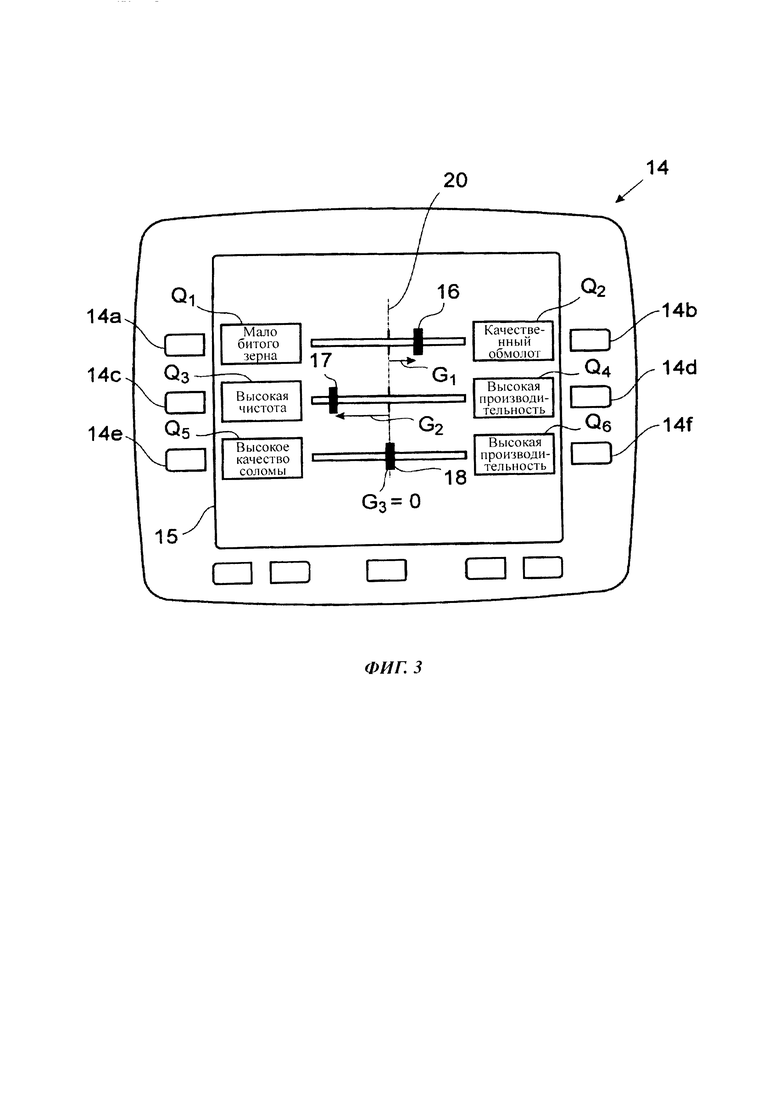
фигура 3 - графический интерфейс пользователя системы помощи водителю, показанной на фигуре 2;
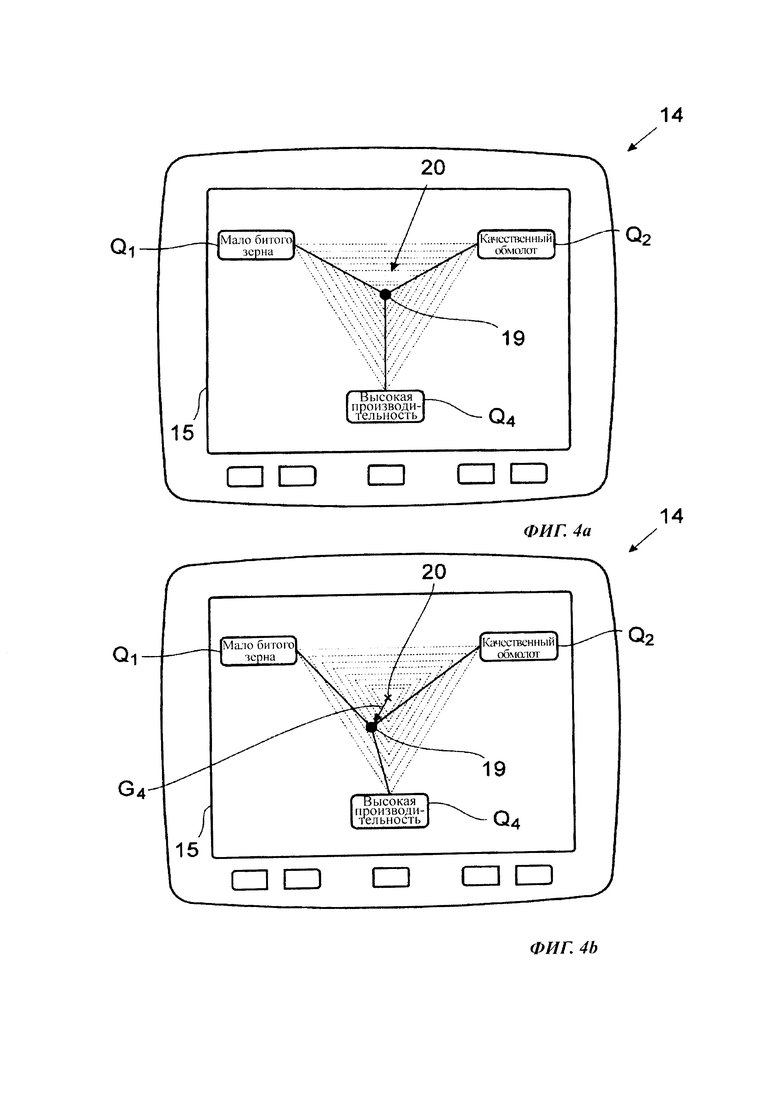
фигура 4 - графический интерфейс пользователя системы помощи водителю, показанной на фигуре 2, в другом варианте осуществления.
Осуществление изобретения
Сельскохозяйственная рабочая машина, изображенная на фигуре 1, служит для выполнения сельскохозяйственного рабочего процесса. Здесь под рабочей машиной предпочтительно понимают зерноуборочный комбайн, используемый для уборки урожая. Предложенное решение может быть использовано для любых других сельскохозяйственных рабочих машин, упомянутых вначале. Все следующие варианты осуществления практически полностью относятся к рабочей машине, выполненной в виде зерноуборочного комбайна. При этом они с соответствующими изменениями действительны для любых иных сельскохозяйственных рабочих машин.
Изображенная рабочая машина содержит следующие рабочие органы: жатку 1, молотильный аппарат 2, сепарирующее устройство 3, очистное устройство 4 и распределительное устройство 5.
В то время как жатка 1 служит для срезания и захвата убираемой культуры, молотильный аппарат 2 предназначен для обмолота захваченной убираемой культуры с получением зерна. При этом под убираемой культурой понимают весь собранный с поля и поступивший на молотильный аппарат 2 материал, причем под зерном понимают зерна, получаемые зерноуборочным комбайном из убираемой культуры.
Молотильный аппарат 2 оснащен молотильным барабаном 6, взаимодействующим с подбарабаньем 7. Поток убираемой культуры, поступающий на молотильный аппарат 2, впоследствии (без уже извлеченного из него зерна) поступает на сепарирующее устройство 3.
По существу, молотильный аппарат 2 служит для извлечения большей части зерна из убираемой культуры посредством обмолота. После этого на сепарирующем устройстве 3 убираемую культуру вместе с оставшимся в ней зерном перемещают, например встряхивают, таким образом, чтобы по возможности отделить оставшееся зерно от соломы и других составляющих убираемой культуры. Зерно, полученное в молотильном аппарате 2 и сепарирующем устройстве 3, подают на очистное устройство 4. На очистном устройстве 4, которое обычно содержит несколько ступеней, от зерна отделяют еще имеющиеся в нем посторонние компоненты, например мякину и частицы соломы, а также необмолоченный материал, например верхушки колосьев или ости. Очищенное зерно через транспортирующее устройство 8, например элеватор, поступает в зерновой бункер 9. Обмолоченную солому, то есть остатки убираемой культуры на сепарирующем устройстве 3, комбайн выкладывает на поле, например, в виде валка вдоль полосы движения.
Вышеуказанным молотильным аппаратом 2 можно управлять путем задания различных параметров машины. В зависимости от конструкции молотильного аппарата 2 к ним относятся параметры привода, например частота вращения барабана или другие показатели движения молотильного барабана, а также зазор подбарабанья, то есть расстояние между молотильным барабаном 6 и подбарабаньем 7. Если молотильный аппарат 2 содержит остеотделители, их также можно регулировать в рамках управления молотильным аппаратом 2.
Предложенная рабочая машина также содержит систему 10 помощи водителю, управляющую рабочими органами 1-5. Такая система 10 помощи водителю содержит запоминающее устройство 11 для хранения данных, то есть запоминающее устройство в информационно-техническом смысле, а также вычислительное устройство 12 для обработки данных, сохраненных в запоминающем устройстве 11. По существу, система 10 помощи водителю предназначена для поддержки пользователя 13 рабочей машины при эксплуатации рабочей машины. Система 10 помощи водителю с запоминающим устройством 11 и вычислительным устройством 12 схематично изображена на фигуре 2.
Система 10 помощи водителю управляет рабочими органами 1-5 в соответствии по меньшей мере с одной определяемой пользователем стратегией А рабочего процесса. Стратегия А рабочего процесса направлена на выполнение по меньшей мере одного критерия Q качества. Для зерноуборочного комбайна под критериями Q качества предпочтительно понимают установку или оптимизацию по меньшей мере одного параметра процесса уборки урожая, в частности «Обмолот», «Доля битого зерна», «Потери при сепарации», «Потери при очистке», «Проскальзывание привода молотильного аппарата», «Расход топлива» и т.п. При этом стратегию А рабочего процесса на примере молотильного аппарата 2 реализуют, главным образом, путем задания параметров молотильного аппарата «Частота вращения барабана» и «Зазор подбарабанья».
Для реализации стратегии А рабочего процесса посредством вычислительного устройства 12 в запоминающее устройство 11 записано по меньшей мере одно правило преобразования. Для правила преобразования возможны различные предпочтительные варианты. В первом варианте правило преобразования определяет параметры машины в процессе управления, а не в процессе регулирования.
Согласно изобретению система 10 помощи водителю оснащена графическим интерфейсом 14 пользователя с дисплеем 15, посредством которого пользователь может задавать по меньшей мере часть стратегии А рабочего процесса. В особенно предпочтительном варианте осуществления под графическим интерфейсом 14 пользователя понимают сенсорный дисплей. Предпочтительный вариант осуществления графического интерфейса 14 пользователя показан на фигурах 3 и 4.
В предложенном техническом решении уделено особое внимание учету конкурирующих критериев Q качества, входящих в состав определяемой пользователем стратегии А рабочего процесса. Термин «конкурирующий» следует понимать в отношении двух критериев Q качества таким образом, что выполнение одного критерия Q качества противоречит выполнению другого критерия Q качества и наоборот. Управление рабочими органами 1-5, направленное на выполнение обоих критериев Q качества, не может быть реализовано в случае конкурирующих критериев Q качества. Решение проблемы конкурирующих критериев Q качества заключается в том, что конкурирующим критериям Q качества назначают переменную G значимости, выражающую значимость конкурирующих критериев Q качества друг относительно друга. В соответствии с указанной значимостью, в частности указанной переменной G значимости, конкурирующие критерии Q качества введены в стратегию А рабочего процесса с учетом соотнесения их значимости. Система 10 помощи водителю при управлении рабочими органами 1-5 отдает приоритет критерию Q качества с более высокой значимостью по сравнению с критерием Q качества с более низкой значимостью.
Важно, что назначенная конкурирующим критериям Q качества переменная G значимости визуализирована посредством виртуального элемента 16-19 управления графического интерфейса 14 пользователя, благодаря чему переменная может быть задана пользователем. Это показано на фигуре 3. На фигуре 3 видно, что переменная G значимости может быть визуализирована и изменена посредством выполненного в виде ползунка элемента 16-19 управления. При этом в данном случае элементу 16-19 управления предпочтительно назначают среднее положение, отражающее сбалансированный учет конкурирующих друг с другом критериев Q качества. Среднее положение обозначено на фигуре 3 позицией 20. Отклонение элемента 16-19 управления от среднего положения 20 соответствует изменению переменной G значимости.
В варианте осуществления, показанном на фигуре 2 и, таким образом, являющемся предпочтительным, каждой паре конкурирующих критериев Q1, Q2; Q3, Q4; Q5, Q6 качества назначена своя переменная G1, G2, G3 значимости. Соответствующая переменная G1, G2, G3 значимости, как показано на фигуре 3, визуализирована посредством виртуального элемента 16-19 управления графического интерфейса 14 пользователя и может быть задана пользователем соответствующим образом. По существу, любой группе конкурирующих критериев Q качества может быть назначена переменная G значимости, которая может быть визуализирована и задана пользователем, как предложено выше. Для группы из трех критериев качества такой вариант показан на фигуре 4.
Как показано на фигурах 3 и 4, переменная G значимости может быть определена самым различным образом. Для представленных на фигуре 3 переменных G1, G2, G3 значимости соответствующей переменной G значимости предпочтительно назначено единственное значение. В варианте исполнения изобретения, показанном на фигуре 4, под переменной G значимости могут понимать вектор, направленный от среднего положения 20. Соответственно, переменная G значимости определена, например, углом, задающим направление вектора, и длиной вектора.
В варианте осуществления, представленном на фигуре 4, графический интерфейс 14 пользователя визуализирует элемент 19 управления, с которым связаны три критерия Q1, Q2, Q4 качества. Перемещение элемента 19 управления из среднего положения 20 позволяет задать важность критериев Q1, Q2 и Q4 качества друг относительно друга. Переменная G4 значимости, как уже упоминалось выше, представляет собой вектор, показанный на фигуре 4b.
Для задания пользователем переменных G значимости в данном случае переменную G значимости можно регулировать виртуальным элементом 16-19 управления посредством операции перетаскивания. Для этого дисплей 15 предпочтительно выполнен в виде сенсорного дисплея. В альтернативном варианте элементы 16-19 управления можно регулировать посредством клавиш 14a-f, которые в особенно предпочтительном варианте осуществления выполнены в виде программируемых клавиш.
Как было указано выше, соответствующий элемент 16-19 управления визуализирован графическим интерфейсом 14 пользователя предпочтительно в виде виртуального ползунка. В альтернативном варианте элемент 16-19 управления может быть визуализирован в виде виртуального поворотного регулятора. В частности, при наличии нескольких конкурирующих критериев Q качества, которым должна быть назначена одна переменная G значимости, может оказаться предпочтительным вариант с многомерным элементом 20 управления согласно фигуре 4.
По существу, предпочтительно, что перемещение пользователем элемента 16 управления пропорционально изменению соответствующей переменной G значимости. Для показанных вариантов осуществления, в которых соответствующий элемент 16-19 управления можно выводить из среднего положения 20, это означает, что удаление элемента 16-19 управления от среднего положения 20 пропорционально изменению переменной G значимости.
Определению соответствующего критерия Q качества придают особое значение. В данном случае предпочтительно каждый критерий Q качества определен заданием цели оптимизации или установки параметра рабочего процесса. Под «оптимизацией» в простейшем случае могут понимать максимизацию или минимизацию соответствующего параметра рабочего процесса. Термин «установка» означает задание конкретного значения для соответствующего параметра рабочего процесса.
Для выполненной в виде зерноуборочного комбайна рабочей машины предусмотрен ряд конкурирующих критериев Q качества, так как процессы, протекающие в зерноуборочном комбайне, в значительной степени взаимосвязаны.
Первым примером двух конкурирующих критериев Q1, Q2 качества является установка или оптимизация параметров рабочего процесса «Доля битого зерна» и «Обмолот». В частности, в данном случае под конкурирующими критериями Q1, Q2 качества предпочтительно понимают минимизацию параметра рабочего процесса «Доля битого зерна» и максимизацию параметра рабочего процесса «Обмолот». Этой паре конкурирующих критериев Q1, Q2 качества назначен элемент 16 управления, который на фигуре 3 может быть смещен из среднего положения 20 в сторону параметра рабочего процесса «Доля битого зерна» или в сторону параметра рабочего процесса «Обмолот». Такая настройка элемента 16 управления позволяет соответственно задавать переменную G1 значимости и, таким образом, значимость соответствующих критериев Q1, Q2 качества друг относительно друга. Как уже было сказано выше, обмолот можно увеличить посредством более агрессивного управления молотильным аппаратом 2, например посредством увеличения частоты вращения барабана, что, однако, происходит против заданной цели минимизации параметра рабочего процесса «Доля битого зерна».
Два других конкурирующих критерия Q3, Q4 качества представляют собой установку или оптимизацию параметра рабочего процесса «Производительность» с одной стороны и «Чистота» с другой стороны. В частности, два конкурирующих критерия Q3, Q4 качества в данном случае означают максимизацию параметров рабочего процесса «Производительность» и «Чистота». Увеличение производительности подразумевает снижение чистоты, то есть увеличение количества посторонних составляющих. Таким образом, противоположные критерии Q3, Q4 качества в данном случае являются конкурирующими критериями качества в указанном выше смысле.
Два других конкурирующих критерия Q5, Q6 качества соответствуют установке или оптимизации параметров рабочего процесса «Производительность» и «Качество соломы». В частности, два конкурирующих критерия Q5, Q6 качества в данном случае означают максимизацию параметра рабочего процесса «Производительность» и максимизацию параметра рабочего процесса «Качество соломы». Увеличение производительности обычно приводит к неравномерному составу соломы, то есть снижению качества соломы. Таким образом, и в этом случае можно говорить о конкурирующих критериях Q5, Q6 качества.
Два других, не показанных на фигуре, конкурирующих критерия качества соответствуют установке или оптимизации параметров рабочего процесса «Производительность» и «Потери», в частности «Потери на сепарацию» и/или «Потери на очистку». По существу, в данном случае конкурируют следующие критерии качества: максимизация параметра рабочего процесса «Производительность» и минимизация параметра рабочего процесса «Потери». Увеличение производительности, по меньшей мере в теории, приводит к увеличению потерь. Соответственно, на фигуре 3 может быть предусмотрен по меньшей мере один дополнительный элемент 16, 17, 18 управления.
По существу, несколько параметров рабочего процесса могут быть объединены в один критерий качества, чтобы упростить задание стратегии рабочего процесса. В данном случае это предпочтительно относится к двум параметрам рабочего процесса «Производительность» и «Расход топлива», взаимосвязь которых подобна другим вышеупомянутым параметрам рабочего процесса. На фигурах присутствует только параметр рабочего процесса «Производительность», который может отражать параметр рабочего процесса «Расход топлива».
Ниже приведены краткие пояснения по вышеупомянутым параметрам рабочего процесса: под параметром рабочего процесса «Доля битого зерна» понимают долю битых зерен в общем объеме зерна, находящемся в зерновом бункере 9. Под параметром рабочего процесса «Обмолот» понимают долю фактически обмолоченного зерна от общего объема зерна, содержащегося в убираемой культуре. Под параметром рабочего процесса «Производительность» понимают объем потока убираемой культуры, проходящего через зерноуборочный комбайн. Параметр рабочего процесса «качество соломы» предпочтительно отражает бережность обмолота, при котором солому не разламывают, и не образуют значительного количества измельченной или раздавленной соломы. Это необходимо, в первую очередь, для производства и выкладки длинной соломы.
Однородность отделенной от зерна соломы. Параметр рабочего процесса «Чистота» описывает, насколько мало содержание посторонних примесей в зерне, находящемся в зерновом бункере 9.
Поскольку визуализацию конкурирующих критериев Q качества осуществляют посредством графического интерфейса 14 пользователя, в зависимости от конфигурации машины и/или конфигурации системы управления, и/или состояния рабочего процесса различные критерии Q качества могут быть визуализированы и заданы пользователем. Это позволяет уменьшить количество доступных для ввода параметров в соответствующей ситуации, что дополнительно снижает вероятность ошибок.
Возможны различные варианты реализации соответствующей стратегии А рабочего процесса. В варианте осуществления, показанном на фигуре 2 и, таким образом, предпочтительном, в запоминающее устройство 11 записан целый ряд стратегий А1-А4 рабочего процесса. В данном случае вычислительное устройство 12 предпочтительно выполнено с возможностью автономного определения по меньшей мере одного параметра машины для реализации выбранной стратегии рабочего процесса и назначения этого параметра соответствующему рабочему органу 2-5. Это позволяет полностью согласовать друг с другом все величины, имеющие отношение к работе рабочих органов 1-5. При этом, в частности, предотвращается осуществление конкурирующих и, возможно, взаимоисключающих управляющих действий.
В частности, система 10 помощи водителю для выполнения критериев Q качества предпринимает соответствующие меры управления, причем система 10 помощи водителю для выполнения конкурирующих друг с другом критериев Q качества предпринимает соответствующие меры управления с учетом соотнесения их значимости в соответствии с переменной G значимости. В вышеприведенном примере с конкурирующими критериями минимизации доли битого зерна и максимизации обмолота системе 10 помощи водителю пришлось бы снизить частоту вращения молотильного барабана 6 для выполнения первого критерия качества и увеличить частоту вращения молотильного барабана 6 для выполнения второго критерия качества. Согласно изобретению на основании переменной G значимости система 10 помощи водителю производит результирующее управляющее действие. В простейшем теоретическом случае система 10 помощи водителю определяет результирующее управляющее действие посредством усреднения соответствующего изменения частоты вращения молотильного барабана 6. Последние названные взаимосвязи для частоты вращения барабана служат исключительно для иллюстрации переменной G значимости. На практике для повышения обмолота увеличение частоты вращения барабана является второстепенным по сравнению с уменьшением зазора подбарабанья.
В следующем варианте, имеющем самостоятельное значение, предложен способ управления описываемой изобретением сельскохозяйственной рабочей машиной.
Для предложенного способа важно, что конкурирующие критерии Q качества вводят в стратегию А рабочего процесса в соответствии с переменной G значимости, причем переменная значимости визуализируется виртуальным элементом 16-19 управления графического интерфейса 14 пользователя и задается пользователем. На все варианты осуществления режимов работы предложенной рабочей машины может быть сделана ссылка.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 жатка
2 молотильный аппарат
3 сепарирующее устройство
4 очистное устройство
5 распределительное устройство
6 молотильный барабан
7 подбарабанье
8 транспортирующее устройство
9 зерновой бункер
10 система помощи водителю
11 запоминающее устройство
12 вычислительное устройство
13 пользователь
14 интерфейс пользователя
15 дисплей
16-19 элемент управления
20 среднее положение
А стратегия рабочего процесса
Q критерии качества (Q1-Q6)
G переменная значимости (G1-G4)
| название | год | авторы | номер документа |
|---|---|---|---|
| CИСТЕМА ПОМОЩИ ДЛЯ ВОДИТЕЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2011 |
|
RU2565225C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| СПОСОБ РАБОТЫ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2758094C2 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2612444C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2708025C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И УСТРОЙСТВО ОТОБРАЖЕНИЯ ДЛЯ НЕГО | 2010 |
|
RU2527759C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2708842C2 |
| РАБОЧАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА С ПО МЕНЬШЕЙ МЕРЕ ОДНИМ УСТРОЙСТВОМ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ | 2013 |
|
RU2622701C2 |
Изобретение относится к сельскохозяйственной рабочей машине для выполнения сельскохозяйственного рабочего процесса. Сельскохозяйственная рабочая машина для выполнения сельскохозяйственного рабочего процесса, выполненная в виде зерноуборочного комбайна, оснащенная несколькими рабочими органами (1-5), предназначенными для переработки захваченной убираемой культуры в зерно, и системой (10) помощи водителю для управления рабочими органами (1-5) в соответствии по меньшей мере с одной определяемой пользователем стратегией (А) рабочего процесса, направленной на выполнение конкурирующих критериев (Q) качества. Система (10) помощи водителю содержит запоминающее устройство (11) для хранения данных и вычислительное устройство (12) для обработки данных, сохраненных в запоминающем устройстве (11), причем система (10) помощи водителю содержит графический интерфейс (14) пользователя, посредством которого по меньшей мере часть стратегии (А) рабочего процесса может быть задана пользователем. Конкурирующие критерии (Q) качества введены в стратегию (А) рабочего процесса с учетом соотнесения их значимости в соответствии с переменной (G) значимости, где каждой паре конкурирующих критериев (Q) качества назначена переменная (G) значимости, причем переменная (G) значимости визуализирована посредством виртуального элемента (16-19) управления графического интерфейса (14) пользователя, выполненного в виде виртуального ползунка или виртуального поворотного регулятора, и может быть задана пользователем. Конкурирующие критерии (Q) качества представляют собой установку или оптимизацию по меньшей мере одного из следующих параметров рабочего процесса: «обмолот», «доля битого зерна», «потери при сепарации», «потери при очистке», «проскальзывание привода молотильного аппарата», «расход топлива», «производительность», «чистота», «качество соломы», при этом конкурирующие критерии (Q) качества характеризуются тем, что выполнение одного критерия (Q) качества противоречит выполнению другого критерия (Q) качества, и наоборот. 2 н. и 10 з.п. ф-лы, 4 ил.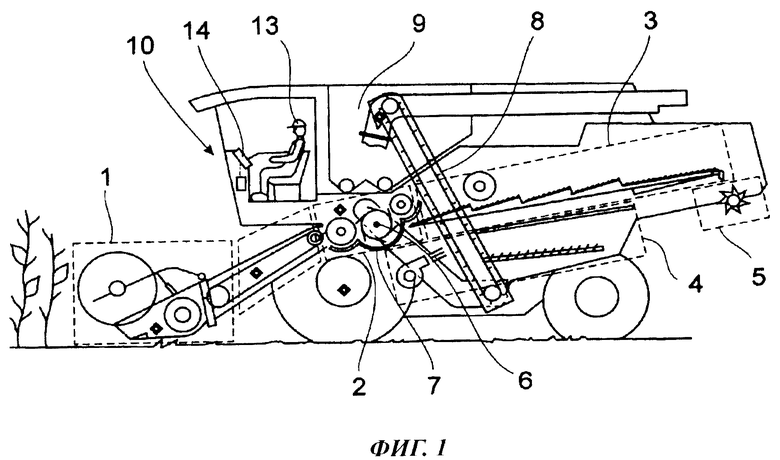
1. Сельскохозяйственная рабочая машина для выполнения сельскохозяйственного рабочего процесса, выполненная в виде зерноуборочного комбайна, оснащенная несколькими рабочими органами (1-5), предназначенными для переработки захваченной убираемой культуры в зерно, и системой (10) помощи водителю для управления рабочими органами (1-5) в соответствии по меньшей мере с одной определяемой пользователем стратегией (А) рабочего процесса, направленной на выполнение конкурирующих критериев (Q) качества, причем система (10) помощи водителю содержит запоминающее устройство (11) для хранения данных и вычислительное устройство (12) для обработки данных, сохраненных в запоминающем устройстве (11), причем система (10) помощи водителю содержит графический интерфейс (14) пользователя, посредством которого по меньшей мере часть стратегии (А) рабочего процесса может быть задана пользователем, отличающаяся тем, что конкурирующие критерии (Q) качества введены в стратегию (А) рабочего процесса с учетом соотнесения их значимости в соответствии с переменной (G) значимости, где каждой паре конкурирующих критериев (Q) качества назначена переменная (G) значимости, причем переменная (G) значимости визуализирована посредством виртуального элемента (16-19) управления графического интерфейса (14) пользователя, выполненного в виде виртуального ползунка или виртуального поворотного регулятора, и может быть задана пользователем, причем конкурирующие критерии (Q) качества представляют собой установку или оптимизацию по меньшей мере одного из следующих параметров рабочего процесса: «обмолот», «доля битого зерна», «потери при сепарации», «потери при очистке», «проскальзывание привода молотильного аппарата», «расход топлива», «производительность», «чистота», «качество соломы», при этом конкурирующие критерии (Q) качества характеризуются тем, что выполнение одного критерия (Q) качества противоречит выполнению другого критерия (Q) качества, и наоборот.
2. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что элемент (16-18) управления имеет среднее положение (20), соответствующее равновесию конкурирующих друг с другом критериев (Q) качества, связанных с элементом (16-18) управления, причем отклонение элемента (16-18) управления от среднего положения (20) предпочтительно соответствует изменению переменной (G) значимости в соответствующем направлении и, таким образом, изменению значимости критериев (Q) качества относительно друг друга.
3. Сельскохозяйственная рабочая машина по п. 1 или 2, отличающаяся тем, что переменная (G) значимости может быть отрегулирована виртуальным элементом (16-18) управления посредством операции перетаскивания.
4. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что перемещение пользователем элемента (16-18) управления пропорционально изменению переменной (G) значимости.
5. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что два конкурирующих критерия (Q1, Q2) качества представляют собой установку или оптимизацию параметров рабочего процесса «Доля битого зерна» и «Обмолот», причем, в частности, два конкурирующих критерия (Q1, Q2) качества означают минимизацию параметра рабочего процесса «Доля битого зерна» и максимизацию параметра рабочего процесса «Обмолот».
6. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что два конкурирующих критерия (Q3, Q4) качества представляют собой установку или оптимизацию параметров рабочего процесса «Производительность» и «Чистота», причем, в частности, два конкурирующих критерия (Q3, Q4) качества означают максимизацию параметров рабочего процесса «Производительность» и «Чистота».
7. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что два конкурирующих критерия (Q5, Q6) качества представляют собой установку или оптимизацию параметров рабочего процесса «Производительность» и «Качество соломы», причем, в частности, два конкурирующих критерия (Q5, Q6) качества означают максимизацию параметра рабочего процесса «Производительность» и максимизацию параметра рабочего процесса «Качество соломы».
8. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что параметры рабочего процесса «Производительность» и «Расход топлива» объединены и назначены одному критерию (Q4, Q6) качества.
9. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что система (10) помощи водителю выполнена с возможностью визуализации конкурирующих критериев (Q) качества в зависимости от конфигурации машины, и/или конфигурации системы управления, и/или состояния рабочего процесса.
10. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что вычислительное устройство (12) выполнено с возможностью автономного определения по меньшей мере одного параметра машины для реализации выбранной стратегии (А) рабочего процесса и назначения этого параметра соответствующему рабочему органу (2-5).
11. Сельскохозяйственная рабочая машина по одному из предыдущих пунктов, отличающаяся тем, что система (10) помощи водителю для выполнения критериев (Q) качества выполнена с возможностью предпринимать соответствующие меры регулирования, причем система (10) помощи водителю для выполнения конкурирующих друг с другом критериев (Q) качества выполнена с возможностью предпринимать соответствующие меры регулирования с учетом соотнесения их значимости в соответствии с переменной (G) значимости.
12. Способ управления сельскохозяйственной рабочей машиной для выполнения сельскохозяйственного рабочего процесса, выполненной в виде зерноуборочного комбайна, оснащенной несколькими рабочими органами (1-5), предназначенными для переработки захваченной убираемой культуры в зерно, и системой (10) помощи водителю для управления рабочими органами (1-5) в соответствии по меньшей мере с одной определяемой пользователем стратегией (А) рабочего процесса, направленной на выполнение конкурирующих критериев (Q) качества, причем система (10) помощи водителю содержит графический интерфейс (14) пользователя, посредством которого по меньшей мере часть стратегии (А) рабочего процесса может быть задана пользователем, отличающийся тем, что конкурирующие критерии (Q) качества вводят в стратегию (А) рабочего процесса с учетом соотнесения их значимости в соответствии с переменной (G) значимости, где каждой паре конкурирующих критериев (Q) качества назначают переменную (G) значимости, причем переменную (G) значимости визуализируют посредством виртуального элемента (16-19) управления графического интерфейса (14) пользователя, выполненного в виде виртуального ползунка или виртуального поворотного регулятора, и ее задает пользователь, причем конкурирующие критерии (Q) качества представляют собой установку или оптимизацию по меньшей мере одного из следующих параметров рабочего процесса: «обмолот», «доля битого зерна», «потери при сепарации», «потери при очистке», «проскальзывание привода молотильного аппарата», «расход топлива», «производительность», «чистота», «качество соломы», при этом конкурирующие критерии (Q) качества характеризуются тем, что выполнение одного критерия (Q) качества противоречит выполнению другого критерия (Q) качества, и наоборот.
| Сырьевая смесь для изготовления стенового материала | 2002 |
|
RU2220926C2 |
| Устройство для рыбной ловли | 2023 |
|
RU2837279C1 |
| EP 2987396 A1, 24.02.2016 | |||
| СПОСОБ ПЕРЕРАБОТКИ МЕХАНИЧЕСКИХ СМЕСЕЙ С ПРИМЕНЕНИЕМ ВИХРЕВОГО КОМПЛЕКСА ГЛУБОКОЙ СЕПАРАЦИИ - ВКГС | 2017 |
|
RU2687923C1 |

