Область техники, к которой относится изобретение
Настоящее изобретение относится к зерноуборочному комбайну согласно ограничительной части пункта 1 формулы изобретения, и к способу эксплуатации зерноуборочного комбайна.
Уровень техники
Зерноуборочные комбайны применяют для жатвы и обмолота зерновых культур. Для этого зерноуборочный комбайн оснащают рядом рабочих агрегатов, предназначенных для выполнения определенных частных процессов обработки общего процесса обработки для переработки убираемой культуры. При этом обмолот выполняют молотильным устройством, извлекающим зерно из убираемой культуры, принятой зерноуборочным комбайном при помощи навесного агрегата, в частности жатки, причем после обмолота зерно последовательно отделяется в сепарирующем устройстве, очищается в очищающем устройстве и подается в бункер для зерна. Кроме того, обычно остаются дополнительные компоненты убираемой культуры, например, мякина и солома, которые разбрасываются вместе с измельченной в измельчающем устройстве соломой по полю или (в случае соломы) выкладываются валком для последующего подбора пресс-подборщиком. Регулировка различных рабочих агрегатов требует от оператора высокой квалификации, поскольку изменения одного параметра настройки влияют на другие параметры настройки или качества процесса в пределах одного рабочего агрегата. Например, увеличение частоты вращения барабана молотильного устройства приводит к увеличению производительности обработки убираемой культуры, одновременно увеличивая долю битого зерна.
В патентном документе DE 102013106133 А1 раскрыт зерноуборочный комбайн согласно ограничительной части пункта 1 формулы. Зерноуборочный комбайн, известный из DE 102013106133 А1, оснащен системой помощи водителю для управления рабочими агрегатами, содержащей запоминающее устройство для сохранения данных, вычислительное устройство для обработки данных, сохраненных в запоминающем устройстве, и графический интерфейс пользователя. Для управления сепарирующим устройством и очищающим устройством предусмотрены соответствующие устройства автоматической регулировки. Эти устройства автоматической регулировки работают независимо друг от друга, обеспечивая эксплуатацию соответствующих рабочих агрегатов в оптимальном эксплуатационном режиме. Система помощи водителю автоматически включает устройства автоматической регулировки, однако оператор имеет возможность выборочного включения или отключения таких устройств. Если устройства автоматической регулировки управляют сепарирующим устройством и очищающим устройством, обеспечивая оптимальный режим работы устройств в текущих условиях эксплуатации, то оператору приходится регулировать другие рабочие агрегаты. Для этого оператор должен иметь возможность своевременного и соразмерного реагирования на изменения, вносимые одним или двумя устройствами автоматической регулировки. Такая схема не позволяет реализовать общее эффективное управление машиной.
Раскрытие сущности изобретения
Учитывая уровень техники, задачей изобретения является такое усовершенствование зерноуборочного комбайна с системой помощи водителю, которое позволило бы существенно снизить нагрузку на оператора при общем управлении машиной.
Поставленная задача решена зерноуборочным комбайном с признаками, раскрытыми в пункте 1 формулы изобретения.
Выгодные варианты осуществления раскрыты в зависимых пунктах формулы.
Согласно пункту 1 формулы, предложен зерноуборочный комбайн, содержащий несколько рабочих агрегатов для выполнения определенных частных процессов обработки общего процесса обработки для переработки убираемой культуры и систему помощи водителю для управления рабочими агрегатами, содержащую запоминающее устройство для сохранения данных и вычислительное устройство для обработки данных, сохраненных в запоминающем устройстве. Чтобы свести к минимуму нагрузку на оператора при общем управлении машиной, система помощи водителю вместе с соответствующими рабочими агрегатами, предусмотренными для выполнения частного процесса обработки, образует автономные устройства автоматической регулировки, служащие для оптимизации управления рабочими агрегатами для осуществления частных рабочих процессов, причем для управления отдельными устройствами автоматической регулировки и обменом данными между устройствами автоматической регулировки система помощи водителю снабжена диспетчером процессов, причем диспетчер процессов выполнен с возможностью взаимодействия с оператором, причем посредством указанного взаимодействия предусмотрена возможность редактирования по меньшей мере одного параметра по меньшей мере одного процесса регулирования, сохраненного в запоминающем устройстве для управления диспетчером процессов. При этом важно, чтобы по меньшей мере те рабочие агрегаты, которые участвуют в осуществлении определенных частных процессов обработки для переработки убираемой культуры, управлялись соответствующими автономными устройствами автоматической регулировки, участие которых в общем процессе обработки и возможность обмена данными между ними определяется диспетчером процессов. Задачей диспетчера процессов является оптимизация общего процесса обработки путем целенаправленного влияния на устройства автоматической регулировки, причем вмешательство оператора допускается в том смысле, что оператор может редактировать по меньшей мере один параметр процесса регулирования, лежащий в основе управления устройств автоматической регулировки диспетчером процессов. Под оператором в смысле изобретения понимают, например, водителя зерноуборочного комбайна (непосредственного оператора) или человека, установившего соединение с системой помощи водителю посредством мобильного устройства обработки данных, или, например, руководителя предприятия, установившего соединение с системой помощи водителю с удаленной фермы посредством устройства обработки данных, которые, учитывая пространственную удаленность от зерноуборочного комбайна, являются опосредованными операторами.
Для этого диспетчер процессов может быть выполнен с возможностью автономной оптимизации общего процесса обработки в зерноуборочном комбайне в соответствии с заданной стратегией уборочного процесса путем согласованного управления отдельными устройствами автоматической регулировки. Заданную стратегию уборочного процесса можно назначить системе помощи водителю путем выбора из группы заданных стратегий уборочного процесса. В качестве доступных для выбора заданных стратегий уборочного процесса можно назвать, например, стратегию достижения максимальной производительности, стратегию качества убираемой культуры, стратегию эффективной или сбалансированной работы зерноуборочного комбайна и прочие подобные варианты стратегий. Доступные для выбора заданные стратегии уборочного процесса можно комбинировать, например, путем задания весовых коэффициентов отдельных стратегий уборочного процесса. Диспетчер процессов может ориентироваться на выбранную заданную стратегию уборочного процесса для автономной оптимизации подлежащих выполнению рабочими агрегатами частных процессов обработки посредством целенаправленного управления отдельными устройствами автоматической регулировки.
При этом для выполнения соответствующего частного процесса обработки можно сохранить несколько различных частных стратегий, которые могут использоваться соответствующими устройствами автоматической регулировки для оптимизации назначенного им рабочего агрегата. Частные стратегии могут представлять собой шаблоны для отдельных устройств автоматической регулировки, определяющие пределы оценочных величин и/или величин настройки, весовых коэффициентов, целевых значений и/или приоритетов.
В предпочтительном варианте осуществления диспетчер процессов может сохранить по меньшей мере один процесс регулировки для управления отдельными устройствами автоматической регулировки и обменом данными между ними, причем этот процесс будет содержать существующие зависимости между параметрами настройки и качества частных процессов обработки.
В предпочтительном варианте осуществления по меньшей мере один процесс регулировки, сохраненный диспетчером процессов в целях управления, может содержать существующие зависимости между параметрами настройки и параметрами качества частных процессов обработки. Предпочтительно, по меньшей мере один процесс регулировки может быть сохранен в запоминающем устройстве системы помощи водителю, с которой связан диспетчер процессов. По меньшей мере один сохраненный процесс регулировки может быть построен на основе набора правил или структуры контроллера. Под параметрами настройки понимают специфические для рабочего агрегата параметры машины, предназначенные для настройки средств обработки убираемой культуры посредством по меньшей мере одного исполнительного механизма, назначенного средствам обработки убираемой культуры, и самостоятельно определяемые устройствами автоматической регулировки. К параметрам настройки навесного оборудования (жатки) относится, в частности, высота ножевого бруса, угол срезания, положение мотовила и прочие подобные параметры. Под средством обработки убираемой культуры в случае жатки понимают, например, ножевой брус, мотовило, втягивающий валок и иные подобные устройства, с которыми соединены исполнительные механизмы, предназначенные для настройки и/или эксплуатации этих средств обработки убираемой культуры. Под «параметрами качества процесса» в случае жатки понимают потери при захвате, потери при срезании колосьев, потери при выделении зерна и прочие параметры. Параметры качества процесса представляют собой критерий оценки для оптимальной настройки рабочего агрегата при помощи устройств автоматической регулировки. То же самое справедливо для прочих рабочих агрегатов зерноуборочного комбайна, предназначенных для выполнения частных процессов обработки.
Кроме того, диспетчер процессов может быть выполнен с возможностью скоординированного управления одним или несколькими устройствами автоматической регулировки и, в зависимости от рабочей ситуации, смещения весового коэффициента при достижении или поддержании параметров качества процесса по меньшей мере одного устройства автоматической регулировки. В целях оптимизации общего процесса обработки зерноуборочного комбайна может потребоваться понизить приоритет достижения или поддержания параметра качества процесса одного рабочего агрегата по сравнению с достижением или поддержанием параметра качества процесса другого рабочего органа путем изменения весового коэффициента. Задание стратегии уборочного процесса, направленной на максимальную производительность обработки убираемой культуры, приводит к тому, что соответствующие рабочие агрегаты управляются соответствующими параметрами настройки, самостоятельно определяемыми соответствующими устройствами автоматической регулировки, с целью обеспечения максимальной производительности в каждом случае. В соответствии с этой заданной стратегией уборочного процесса «максимальная производительность» подразумевает установление соответствующего весового коэффициента параметров качества процесса соответствующих рабочих агрегатов, в частности, путем допуска повышенных потерь убираемой культуры и/или снижения качества по сравнению с заданной стратегией уборочного процесса «качество убираемой культуры». Однако такая настройка может привести к перегрузке рабочего агрегата во время отдельных частных процессов обработки, что может затруднить достижение цели заданной стратегии уборочного процесса «максимальная производительность». За счет балансировки весовых коэффициентов с зависимости от рабочей ситуации гарантируют согласованную общую оптимизацию всех рабочих агрегатов зерноуборочного комбайна.
Кроме того, диспетчер процессов может быть выполнен с возможностью - вследствие смещения весового коэффициента - управления по меньшей мере одним устройством автоматической регулировки таким образом, чтобы соответствующий рабочий агрегат, управляемый соответствующим устройством автоматической регулировки, эксплуатировался вне соответствующего оптимального эксплуатационного режима. Эксплуатация по меньшей мере одного рабочего агрегата вне соответствующего оптимального эксплуатационного режима направлена на сведение к минимуму возможных воздействий настроек, специфичных для рабочего агрегата, на другие, в частности, подчиненные рабочие агрегаты, которые могли бы воспрепятствовать достижению общей оптимизации в рамках выбранной заданной стратегии уборочного процесса.
Кроме того, диспетчер процессов может быть выполнен с возможностью задания отличающихся частных стратегий по меньшей мере для одного из устройств автоматической регулировки. Это может иметь место в том случае, если общая оптимизация не может быть достигнута в рамках выбранной заданной стратегии уборочного процесса и соответствующих исходных частных стратегий вследствие изменения внешних условий.
Кроме того, диспетчер процессов может быть выполнен с возможностью автономного задания пределов регулировки, в рамках которых устройства автоматической регулировки управляют соответствующими рабочими агрегатами. В качестве альтернативы или дополнения диспетчер процессов может быть выполнен с возможностью автономного задания целевых значений параметров качества процесса, в рамках которых устройства автоматической регулировки управляют соответствующими рабочими агрегатами. Таким образом, параметр качества процесса «Уменьшение доли дробленого зерна» может быть достигнут путем уменьшения целевого значения параметра качества процесса «Доля зерна в недомолоте». Это может быть реализовано, например, увеличением значения параметра качества процесса «Обмолот», для чего устройство автоматической регулировки, назначенное молотильному агрегату, соответствующим образом изменяет параметры регулировки. Другим примером является снижение параметра качества процесса «Предельно допустимые потери», который может иметь различные выражения для различных рабочих агрегатов, при достижении другого предельного значения параметров качества процесса или параметров регулировки, в частности, достижения максимальной нагрузки на двигатель. Кроме того, диспетчер процессов может различать максимальные и заданные значения параметров качества процесса или использовать их в качестве основы для управления устройствами автоматической регулировки. В качестве примера можно назвать соблюдение так называемого предела недомолота в качестве максимального значения и уровня недомолота в качестве целевого значения.
В частности, диспетчер процессов может быть выполнен с возможностью оптимизации общего процесса обработки при эксплуатации зерноуборочного комбайна в режиме неполной нагрузки. Так, например, вследствие неполной нагрузки, обусловленной скоростью движения, не может быть реализована стратегия уборочного процесса «Максимальная производительность». Тем не менее, для оптимизации общего уборочного процесса в рамках таких граничных условий диспетчер процессов может самостоятельно сдвигать и/или заново задавать приоритеты.
Предпочтительно, для отражения функциональных взаимосвязей частного процесса обработки, осуществляемого рабочим агрегатом, по меньшей мере одному параметру качества процесса может быть назначено по меньшей мере одно адаптивное поле характеристик, причем этот по меньшей мере один параметр качества процесса может быть определен в качестве выходной величины по меньшей мере одного поля характеристик. На основе этой функциональной взаимосвязи модели системы соответствующего рабочего агрегата в каждом случае в зависимости от различных рабочих ситуаций можно определять параметры регулировки, позволяющие оптимизировать реализацию частного процесса обработки.
Кроме того, диспетчер процессов может быть выполнен с возможностью приема внешних данных, влияющих на параметры качества частных процессов обработки. Под внешними данными, предпочтительно, могут пониматься данные и информация, отражающие внешние факторы влияния на общий процесс обработки, которые не могут быть непосредственно измерены системами датчиков зерноуборочного комбайна. К таким факторам влияния относится, например, погода и/или сроки, определяющие или ограничивающие доступный период для уборки поля. Таким образом, внешние данные представляют собой, в частности, данные о текущей погоде, а также данные о логистике, которые могут влиять на выполнение общего процесса обработки. Кроме того, к внешним данным могут относиться параметры, вводимые непосредственным или опосредованным оператором зерноуборочного комбайна. К данным о логистике относятся, например, предельные сроки уборки участка поля или координация зерноуборочного комбайна в качестве уборочной машины в логистической цепочке уборки урожая, включающей несколько уборочных и/или транспортных машин. Для этого диспетчер процессов может принимать внешние данные от системы управления парком машин, содержащие, помимо информации о подлежащем обработке участке поля, сведения о подлежащих транспортировке объемах. Кроме того, внешние данные могут передаваться на другие уборочные или транспортные средства уборочной логистической цепочки. Благодаря этому диспетчер процессов может адаптировать отдельные заданные частные стратегии устройств автоматической регулировки. Так, например, при ограниченной вместимости транспортных средств параметр качества процесса «Производительность» зерноуборочного комбайна можно изменить посредством соответствующего управления устройствами автоматической регулировки, в то время как достижение других параметров качества процесса, относящиеся к качеству работы или потерям рабочих агрегатов, может больше учитываться путем соответствующего управления устройствами автоматической регулировки.
В частности, диспетчер процессов может быть выполнен с возможностью автономного принятия мер в зависимости от принятых внешних данных. Так, диспетчер процессов, учитывая внешние данные, может адаптировать заданные частные стратегии, в частности, изменять пределы параметров качества процесса или изменять частные стратегии устройств автоматической регулировки. Кроме того, он может планировать мероприятия по техническому обслуживанию или регулировке, требующие прерывания уборочного процесса. Такие мероприятия можно интегрировать в последовательность уборочного процесса на основании имеющихся логистических данных, чтобы свести к минимуму прерывание уборочного процесса. В качестве примера таких мер по техническому обслуживанию или регулировке можно назвать проверку и/или калибровку датчиков зерноуборочного комбайна, переоснащение молотильного устройства или другие регулировки рабочих агрегатов, которые могут быть выполнены только в отсутствие потока материала в комбайне или не могут быть выполнены из кабины.
Согласно варианту осуществления, раскрытому в пункте 13 формулы, в качестве рабочих агрегатов используется по меньшей мере одно навесное устройство, в частности жатка для зерновых культур, молотильное устройство, сепарирующее устройство, которое может быть выполнено в виде клавишного соломотряса или осевого сепаратора с одним или двумя разделительными роторами, очищающее устройство и распределительное устройство. Распределительное устройство может содержать устройство распределения мякины, измельчающее устройство и распределительное устройство для распределения по меньшей мере убираемой культуры, поступающей из измельчающего устройства.
При этом для управления этими рабочими агрегатами в качестве устройств автоматической регулировки может быть предусмотрено по меньшей мере одно автоматическое устройство навесного агрегата, автоматическое устройство молотильного устройства, автоматическое устройство сепарирующего устройства, автоматическое устройство очищающего устройства и автоматическое устройство распределительного устройства. Функциональные взаимосвязи для каждого частного процесса обработки сохраняют предпочтительно в запоминающем устройстве системы помощи водителю, доступ к которому имеют соответствующие устройства автоматической регулировки для автономного определения параметров регулировки соответствующего рабочего агрегата. При этом во время уборочного процесса функциональные взаимосвязи постоянно корректируются в соответствии с текущим состоянием уборочного процесса.
Кроме того, целесообразен вариант, в котором по меньшей мере одно устройство автоматической регулировки содержит по меньшей мере два вспомогательных устройства автоматической регулировки. Это позволяет снизить сложность регулирования частных процессов обработки в рабочем агрегате, в частности, путем более мелкого деления частного процесса обработки. Такой вариант выгоден при самостоятельном определении параметров регулировки вспомогательными автоматическими устройствами. Так, автоматическое устройство навесного агрегата в качестве вспомогательных устройств автоматической регулировки может содержать автоматическое устройство мотовила и автоматическое устройство втягивающего валка, функционирование которых согласовано с другими устройствами автоматической регулировки.
В следующем варианте осуществления диспетчер процессов может быть выполнен с возможностью приема в качестве внешних данных и настройки по меньшей мере одной заданной стратегии уборочного процесса и/или по меньшей мере одного параметра качества процесса посредством взаимодействия с оператором. Для этого оператор может выполнить непосредственную настройку по меньшей мере одного параметра качества процесса, задав максимальное или минимальное значение. Например, в качестве минимального значения можно задать величину примесей, то есть долю незерновых компонентов в зерновом бункере, равной 1%. В качестве альтернативы или дополнения оператор или диспетчер процессов может задать желаемую тенденцию для параметра качества процесса. Например, на основании частной стратегии можно задать максимальное значение объема недомолота 70%. Кроме того, оператор путем взаимодействия с диспетчером процессов может непосредственно задавать тенденцию с целью достижения минимально возможного объема недомолота.
Предпочтительно, диспетчер процессов может быть выполнен с возможностью взаимодействия с оператором посредством голосового управления. Взаимодействие посредством голосового управления между диспетчером процессов и оператором может быть реализовано, в частности, на естественном языке. Взаимодействие посредством голосового управления упрощает коммуникацию между диспетчером процессов и оператором. При этом взаимодействие посредством голосового управления может быть реализовано в форме диалогов, визуализированных через графический интерфейс пользователя, или в форме голосового ввода и вывода. При этом взаимодействие, в зависимости от ситуации, может быть инициировано диспетчером процессов или оператором.
В следующем варианте осуществления диспетчер процессов может быть выполнен с возможностью регистрации и анализа непосредственного или опосредованного взаимодействия между системой помощи водителю и оператором. Это позволяет выявить возможные проблемы, конкретные предложения по устранению которых могут быть сделаны в интерактивном диалоге, инициированном диспетчером процессов. Регистрируемым опосредованным взаимодействием является, например, частое включение заднего хода или повторяемое изменение скорости движения оператором во время уборочного процесса. Распознаваемое непосредственное взаимодействие представляет собой частоту запросов к системе помощи водителю в целом или в определенном контексте, например, контексте регулировки определенного рабочего агрегата.
Кроме того, диспетчер процессов может быть выполнен с возможностью самостоятельного вступления во взаимодействие с оператором на основании проверки достоверности и/или вследствие анализа общей настройки машины. Для этого данные, предоставленные системами датчиков зерноуборочного комбайна и проанализированные вычислительным устройством, могут быть проверены на достоверность. Данные могут представлять собой параметры качества процесса, а также показания различных систем датчиков. Проверка достоверности в случае распознавания неправдоподобных данных параметров качества процесса и/или показаний может привести к тому, что диспетчер процессов запустит соответствующий интерактивный диалог для исправления ситуации. В качестве возможных мер исправления диспетчер процессов может предложить калибровку датчика или адаптацию пределов регулировки параметра качества процесса. Результат анализа общей настройки машины также может быть использован в качестве причины самостоятельного вступления во взаимодействие с оператором и предложения мер по исправлению в рамках данного интерактивного диалога.
В следующем варианте осуществления диспетчер процессов может быть выполнен с возможностью управления графическим интерфейсом пользователя оператором при изменении заданной стратегии уборочного процесса или частной стратегии с целью визуализации итоговых изменений пределов регулировки по меньшей мере одного параметра качества процесса. Таким образом, оператор может немедленно наблюдать реакцию диспетчера процессов, обусловленную изменением заданной стратегии или частной стратегии.
При этом графический интерфейс пользователя может быть выполнен с возможностью визуализации пределов регулировки на основании абсолютных значений по меньшей мере одного параметра качества процесса. Для этого могут отображаться соответствующие минимальные и максимальные значения по меньшей мере одного параметра качества процесса, предпочтительно, с использованием геометрических фигур.
Кроме того, графический интерфейс пользователя может быть выполнен с возможностью визуализации тенденции по меньшей мере одного параметра качества процесса. Для этого может быть предусмотрен по меньшей мере один индикатор тенденции, который может быть активирован оператором.
Согласно предпочтительному варианту осуществления графический интерфейс пользователя может быть выполнен с возможностью дополнительного отображения текущего фактического значения по меньшей мере одного параметра качества процесса. Это позволяет оператору своевременно отслеживать влияние или воздействие изменений, предпринятых оператором в рамках взаимодействия с диспетчером процессов.
Кроме того, поставленная задача решена способом эксплуатации зерноуборочного.
Предложен способ эксплуатации зерноуборочного комбайна, содержащего несколько рабочих агрегатов, посредством которых осуществляют определенные частные процессы обработки общего процесса обработки для переработки убираемой культуры, а также систему помощи водителю, предусмотренную для управления рабочими агрегатами и содержащую запоминающее устройство для сохранения данных, вычислительное устройство для обработки данных, сохраненных в запоминающем устройстве, а также графический интерфейс пользователя; способ отличается тем, что посредством системы помощи водителю вместе с соответствующими рабочими агрегатами, предусмотренными для выполнения частных процессов обработки, образуют автономно работающие устройства автоматической регулировки, служащие для оптимизации управления рабочими агрегатами для выполнения частных рабочих процессов, причем управление отдельными устройствами автоматической регулировки и обменом данными между устройствами автоматической регулировки осуществляют посредством диспетчера процессов, назначенного системе помощи водителю, причем диспетчер процессов выполнен с возможностью взаимодействия с оператором, причем посредством указанного взаимодействия редактируют по меньшей мере один параметр по меньшей мере одного процесса регулирования, сохраненного диспетчером процессов в запоминающем устройстве в целях управления.
Краткое описание чертежей
Предложенное изобретение раскрыто ниже на примере варианта осуществления, представленного на фигурах, на которых изображено:
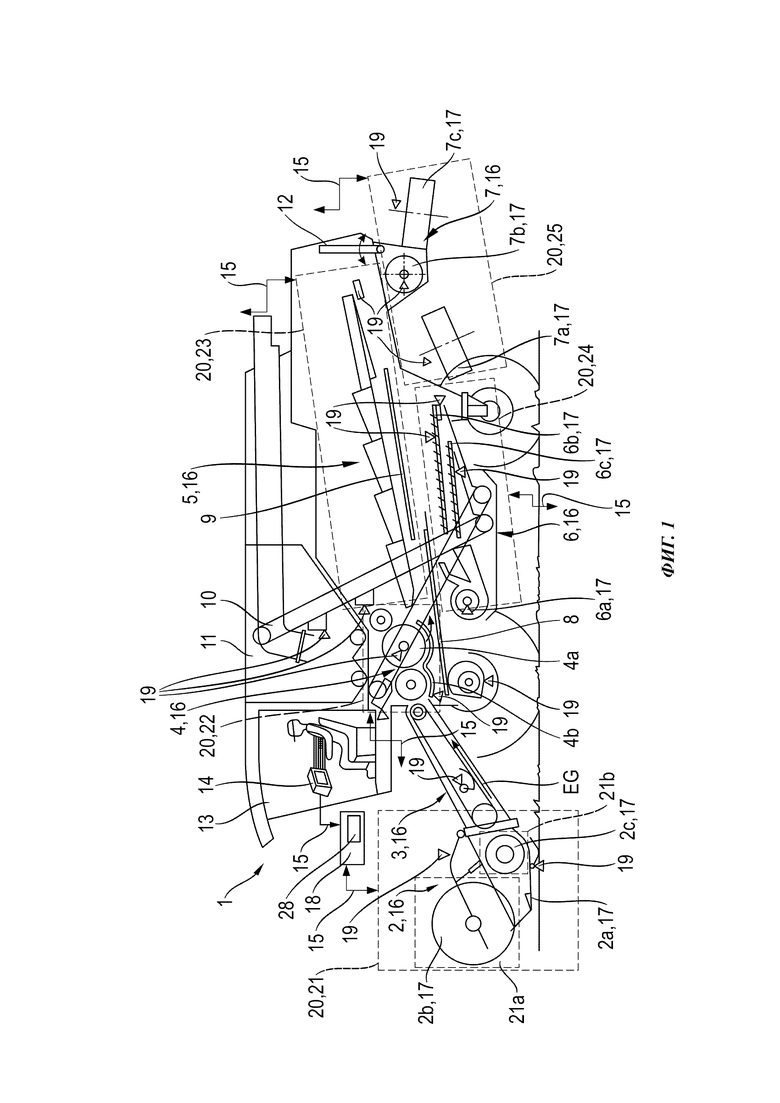
Фигура 1: схематичное изображение зерноуборочного комбайна, вид
сбоку.
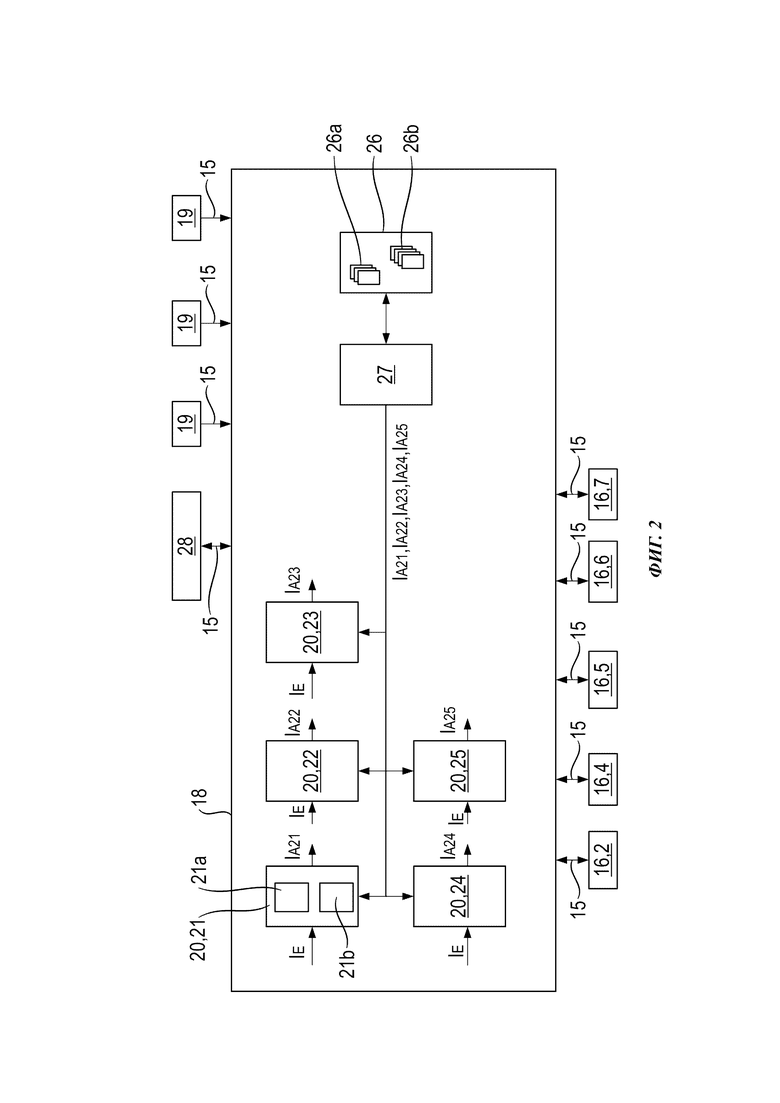
Фигура 2: схематичное изображение принципа функционирования устройства автоматической регулировки.
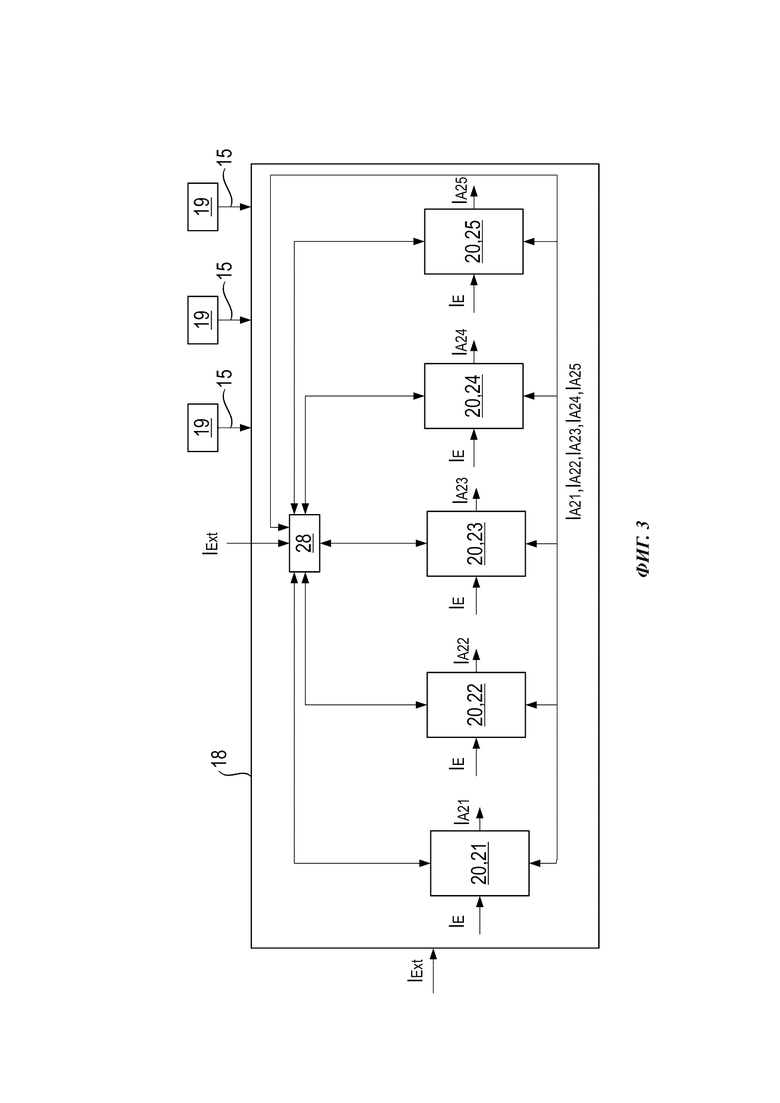
Фигура 3: схематичное изображение принципа функционирования диспетчера процессов.
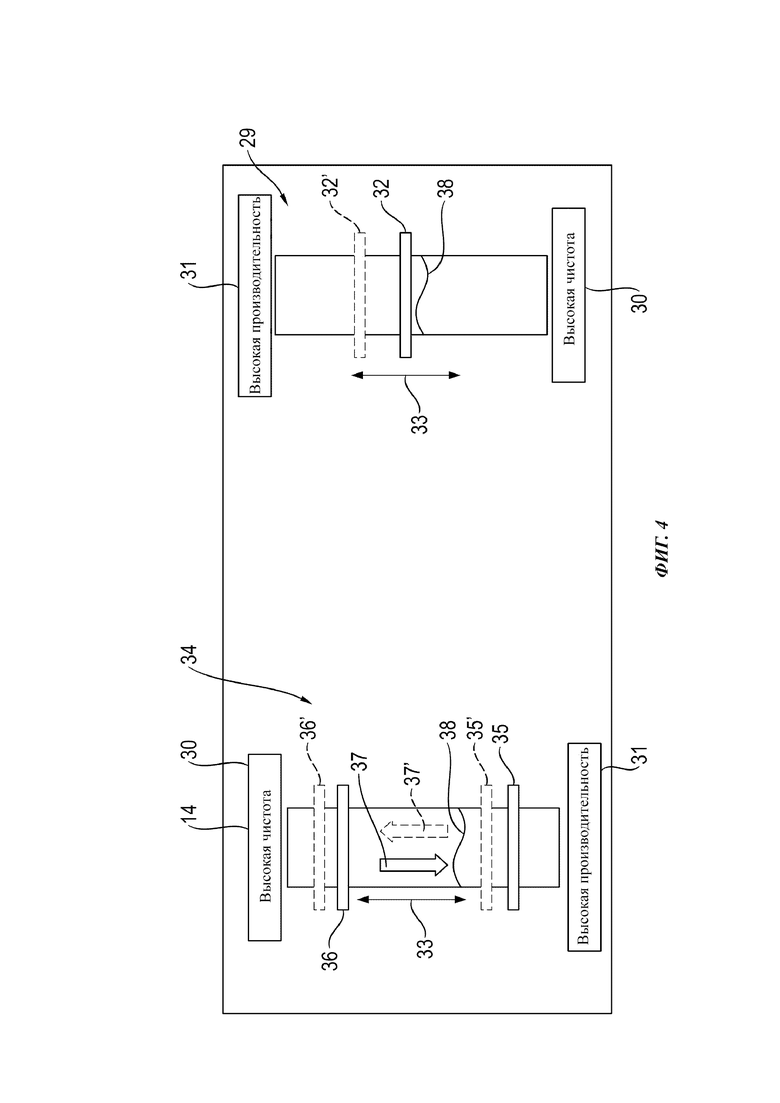
Фигура 4: схематичное изображение визуализации интерфейса пользователя для настройки стратегии уборочного процесса и соответствующего параметра качества процесса.
Осуществление изобретения
В передней части зерноуборочного комбайна 1, схематично изображенного на фигуре 1, установлен навесной агрегат, выполненный в виде жатки 2 и соединенный известным способом с наклонной камерой 3 зерноуборочного комбайна 1. Поток EG убираемой культуры, проходящий через наклонную камеру 3, поступает из наклонной камеры 3 в молотильное устройство 4 зерноуборочного комбайна 2. Часть потока убираемой культуры, выходящая из молотильного устройства 4 и состоящая, по существу, из незерновых компонентов, в частности мякины и соломы, поступает в сепарирующее устройство 5, выполненное в виде клавишного соломотряса. Другая часть потока убираемой культуры, состоящая, по существу, из зерна, отделенного от убираемой культуры, поступает из молотильного устройства 4 на транспортную доску 8. Согласно изобретению, сепарирующее устройство 5 может быть выполнено в виде известного и поэтому не показанного на фигуре разделительного ротора. Из сепарирующего устройства 5 часть потока EG убираемой культуры направляется таким образом, чтобы содержащиеся в части 5 потока убираемой культуры свободно движущиеся зерна оседали в нижней части сепарирующего устройства 5. Зерна из молотильного устройства 4 и зерна, отделенные сепарирующим устройством 5 из потока EG убираемой культуры, поступают в очищающее устройство 6 через транспортную доску 9 обратного хода и транспортную доску 8. Из очищающего устройства 6 очищенный поток зерна поступает в зерновой бункер 11 зерноуборочного комбайна 1 с помощью транспортировочного устройства 10.
За сепарирующим устройством 5, выполненным в виде клавишного соломотряса, следует измельчающее и распределительное устройство 7. Солома из задней части сепарирующего устройства 5 поступает в измельчающее и распределительное устройство 7, после чего выкладывается валком непосредственно на грунт или измельчается и распределяется по грунту, предпочтительно, по всей ширине навесного агрегата 2. Для выкладки соломы на грунт предусмотрена так называемая заслонка 12 для соломы, отклоняющая и выпускающая солому мимо измельчающего и распределительного устройства 7.
Навесной агрегат 2, выполненный в виде жатки, содержит приводимый в движение колебательным образом ножевой брус 2а, мотовило 2b с возможностью изменения положения и втягивающий шнек 2с. Молотильное устройство 4 содержит по меньшей мере один молотильный барабан 4а с регулируемой частотой вращения, нижнюю сторону которого частично окружает по меньшей мере одно подбарабанье 4b. Предпочтительно, молотильное устройство 4 выполнено в виде многобарабанного молотильного механизма. Расстояние от подбарабанья 4b по меньшей мере до одного молотильного барабана 4а может изменяться. Ширина раскрытия подбарабанья 4b может изменяться. Очищающее устройство 6 содержит воздуходувное устройство 6а с регулируемой частотой вращения, а также просеивающее устройство с регулируемым углом наклона, содержащее по меньшей мере одно верхнее решето 6b и нижнее решето 6с. Верхнее решето 6b и нижнее решето 6 с приводятся в движение колебательным образом и содержат ячейки различной ширины. Измельчающее и распределительное устройство 7 содержит устройство 7а транспортировки мякины, измельчающее устройство 7b с регулируемой частотой вращения и распределительное устройство 7с. Распределительное устройство 7с предпочтительно выполнено в виде радиального распределителя. Измельчающее устройство 7b содержит вращающуюся режущую головку и противорежущее устройство с регулируемым положением. Устройство 7а транспортировки мякины может эксплуатироваться в виде выбрасывающего мякину воздуходувного устройства, подающего мякину на распределительное устройство 7с для распределения вместе с измельченной соломой из распределительного устройства 7с, или в виде распределяющего мякину воздуходувного устройства, распределяющего мякину непосредственно на грунте.
Навесной агрегат 2, молотильное устройство 4, сепарирующее устройство 5, очищающее устройство 6, а также измельчающее и распределительное устройство 7 в дальнейшем будут называться рабочими агрегатами 16, служащими для выполнения соответствующих конкретному рабочему агрегату частных процессов обработки общего процесса обработки. Компоненты 2а, 2b, 2с, 4а, 4b, 6а, 6а, 6b, 6с, 7а, 7b, 7с рабочих агрегатов 16 (перечень не является исчерпывающим) в дальнейшем будут называться средствами 17 обработки убираемой культуры.
Кроме того, зерноуборочный комбайн 1 содержит кабину 13 оператора, в которой расположен по меньшей мере один графический интерфейс 14 пользователя, подключенный к системе 15 шин зерноуборочного комбайна 1. Система 18 помощи водителю через систему 15 шин известным образом обменивается данными с графическим интерфейсом 14 пользователя и несколькими системами 19 датчиков. Подробности, относящиеся к структуре систем 19 датчиков, раскрыты в опубликованной патентной заявке DE 10147733 А1, содержание которой полностью включено в настоящее описание путем ссылки. Поэтому структура систем 19 датчиков не будет описываться повторно.
Система 18 помощи водителю предназначена для управления рабочими агрегатами 16, в частности, для помощи оператору зерноуборочного комбайна 1 в оптимизации регулировки рабочих агрегатов 16 с учетом условий уборочного процесса. Для этого навесной агрегат 2, молотильное устройство 4, сепарирующее устройство 5, очищающее устройство 6, измельчающее и распределительное устройство 7 вместе с системой 18 помощи водителю образуют автономные устройства 20 автоматической регулировки, специфичные для каждого рабочего агрегата. В качестве устройств 20 автоматической регулировки предусмотрено автоматическое устройство 21 навесного агрегата, автоматическое устройство 22 молотильного устройства, автоматическое устройство 23 сепарирующего устройства, автоматическое устройство 24 очищающего устройства и автоматическое устройство 25 распределительного устройства. Каждое из устройств 20 автоматической регулировки может содержать вспомогательные устройства автоматической регулировки, служащие для автономного управления различными средствами 17 обработки убираемой культуры рабочего агрегата 16. Так, автоматическое устройство 20 навесного агрегата может содержать два вспомогательных устройства автоматической регулировки, а именно автоматическое устройство 21а мотовила, служащее для управления мотовилом 2b, и автоматическое устройство 21b втягивающего валка, служащее для управления втягивающим шнеком 2с. Система помощи водителю вместе с соответствующими рабочими агрегатами 16, предназначенными для выполнения частных процессов обработки, образует автономно работающие устройства 20 автоматической регулировки, служащие для оптимизации управления рабочими агрегатами 16 для выполнения частных рабочих процессов. Частные процессы обработки для навесного агрегата 2 представляют собой захват культуры мотовилом 2b и транспортировку потока EG убираемой культуры втягивающим шнеком 2с. Частные процессы обработки молотильного устройства 4, сепарирующего устройства 5, очищающего устройства 6, измельчающего и распределяющего устройства 7 представляют собой, в частности, процессы обмолота, сепарации, очистки, измельчения и распределения потока EG убираемой культуры.
На фигуре 2 схематично показан принцип функционирования устройства 20 автоматической регулировки. Система 18 помощи водителю содержит запоминающее устройство 26 и вычислительное устройство 27, предназначенное для обработки данных, сохраненных в запоминающем устройстве 26. Данные отдельных рабочих агрегатов 16 или их средств 17 обработки убираемой культуры, полученные с помощью систем 19 датчиков, доступны соответствующему устройству 20 автоматической регулировки в качестве входных данных IE. Устройства 20 автоматической регулировки автономно генерируют выходные данные IA21, IA22, IA23, IA24, IA25, специфичные для рабочего агрегата и используемые для изменения параметров регулировки соответствующих рабочих агрегатов 16 или их средств 17 обработки убираемой культуры. Выходные данные IA21, IA22, IA23, IA24, IA25, специфичные для рабочего агрегата, предоставляются системой 18 помощи водителю не только соответствующему устройству 20 автоматической регулировки, но и всем прочим устройствам 20 автоматической регулировки.
В запоминающем устройстве 26 сохранены заданные стратегии 26а уборочного процесса, которые можно выбирать для осуществления общего процесса обработки в зерноуборочном комбайне 1. Заданные стратегии 26а уборочного процесса могут отображаться и выбираться посредством графического интерфейса 14 пользователя. В качестве доступных для выбора стратегий 26а уборочного процесса предложены, например, стратегии максимальной производительности, качества обрабатываемой культуры (в отношении чистоты и/или доли дробленого зерна), эффективной работы зерноуборочного комбайна 1 и прочие подобные стратегии. Для формирования устройств 20 автоматической регулировки системой 18 помощи водителю и соответствующим рабочим агрегатом 16 несколько частных стратегий 26b сохраняются в запоминающем устройстве 26 с возможностью соответствующего выбора. Соответствующая частная стратегия 26b, выбранная для устройства 20 автоматической регулировки, реализуется вычислительным устройством 27 путем автономного определения параметров регулировки и задания соответствующему рабочему агрегату 16.
Для отображения функциональных взаимосвязей частного процесса обработки, выполняемого соответствующим рабочим агрегатом 16, по меньшей мере одному параметру качества процесса назначается по меньшей мере одно адаптивное поле характеристик. При этом данный по меньшей мере один параметр качества процесса определяется в качестве выходной величины по меньшей мере одного поля характеристик. На основании этой функциональной взаимосвязи модели системы для соответствующего рабочего агрегата 16 устройства 20 автоматической регулировки в зависимости от различных рабочих ситуаций определяют параметры регулировки рабочих агрегатов 16, позволяющие оптимизировать реализацию соответствующего частного процесса обработки. Для циклической адаптации полей характеристик используются данные, зарегистрированные системами 19 датчиков.
Кроме того, система 18 помощи водителю, которая вместе с соответствующими рабочими агрегатами 16, предназначенными для выполнения частных процессов обработки, образует автономно работающие устройства 20 автоматической регулировки, служащие для оптимизации управления рабочими агрегатами 16 для выполнения частных рабочих процессов, содержит диспетчер 28 процессов. Диспетчер 28 процессов назначен системе 18 помощи водителю. В частности, диспетчер 28 процессов может быть интегрирован в систему 18 помощи водителю. Диспетчер 28 процессов выполнен с возможностью активации отдельных устройств 20 автоматической регулировки и обменом данными между устройствами 20 автоматической регулировки. Задачей диспетчера 28 процессов является автономная оптимизация общего процесса обработки в зерноуборочном комбайне 1 в соответствии с выбранной заданной стратегией уборочного процесса путем согласованного управления отдельными устройствами 20 автоматической регулировки. Этот процесс осуществляется диспетчером 28 процесса путем управления одним или всеми устройствами 20 автоматической регулировки посредством по меньшей мере одного процесса управления, реализованного в виде свода или структуры правил управления, причем в случае диспетчера 28 процессов, интегрированного в систему 18 помощи водителю, реализация осуществляется вычислительным устройством 27. По меньшей мере один процесс управления устройствами 20 автоматической регулировки и обменом данными между ними записывается диспетчером 28 процесса в запоминающее устройство 26. По меньшей мере один процесс регулировки содержит и учитывает существующие зависимости между параметрами регулировки и параметрами качества частных процессов обработки.
На фигуре 3 схематично изображен принцип функционирования диспетчера 28 процессов. Диспетчер 28 процессов координирует и управляет устройствами 20 автоматической регулировки таким образом, что посредством диспетчера 28 процессов запускается коммуникация между устройствами 20 автоматической регулировки с целью обмена их выходными данными IA21, IA22, IA23, IA24, IA25. При этом соответствующие выходные данные IA21, IA22, IA23, IA24, IA25 устройств 20 автоматической регулировки сначала передаются в диспетчер 28 процессов, который передает их по меньшей мере в одно другое устройство 20 автоматической регулировки, или непосредственно по меньшей мере в одно другое устройство 20 автоматической регулировки, причем диспетчер 28 процессов генерирует соответствующую команду на передачу.
Система 18 помощи водителю и диспетчер 28 процессов выполнены с возможностью учета внешних данных IExt. В частности, внешние данные IExt содержат информацию о внешних факторах влияния, не поддающихся непосредственному измерению системами 19 датчиков зерноуборочного комбайна 1. Внешние данные включают, в том числе, текущие данные о погоде и логистике, способные повлиять на реализацию общего процесса обработки. К ним могут также относится данные, введенные оператором зерноуборочного комбайна, а также стратегия, заданная лицом, координирующим работу уборочных машин, в частности, управляющим фермой или подрядчиком. Данные о логистике содержат, например, заданные сроки уборки участка поля или координацию зерноуборочного комбайна 1 в качестве уборочной машины в логистической цепочке уборки урожая, включающей несколько уборочных и транспортных машин. Для этого диспетчер 28 процессов или система 18 помощи водителю выполнены с возможностью приема внешних данных IExt от центральной системы управления парком уборочной техники, которая, помимо информации о подлежащем обработке участке поля, содержит информацию о доступных транспортных объемах. Кроме того, внешние данные IExt могут передаваться другими уборочными и/или транспортными средствами, входящими в состав логистической цепочки уборки урожая. Благодаря этому диспетчер 28 процессов настраивает отдельные предварительные установки в соответствии с частными стратегиями 26b устройств 20 предварительной регулировки. Так, например, в случае ограниченных транспортных возможностей параметр качества процесса «Производительность» зерноуборочного комбайна 1 посредством соответствующего управления устройствами 20 автоматической регулировки, в частности автоматического устройства 21 навесного агрегата и автоматического устройства 22 молотильного агрегата, можно адаптировать таким образом, чтобы снизить производительность. В то же время достижение других заданных параметров качества процесса, отражающих качество работы или потери рабочих агрегатов 16, может в большей степени учитываться соответствующим управлением устройствами 20 автоматической регулировки. Для этого диспетчер 28 процессов автономно задает адаптированным или отличным образом частные стратегии 26b.
Кроме того, диспетчер 28 процессов на основании внешних данных самостоятельно принимает меры, интегрированные в общий процесс обработки зерноуборочного комбайна 1, с целью максимальной оптимизации процесса. Так, например, возникающие периоды ожидания, которые могут быть выведены на основании внешних данных IExt для планирования логистики, можно использовать для сигнализации оператору зерноуборочного комбайна 1 о возможности проведения необходимого обслуживания, переоснащения или регулировки. Так, диспетчер 28 процессов в течение такого периода ожидания может предложить проверку и при необходимости адаптацию калибровки отдельных датчиков систем 19 датчиков. Кроме того, диспетчер 28 процессов может предложить техническое обслуживание, возможное только при остановленном потоке материала через зерноуборочный комбайн 1 или требующее выхода из кабины, например, регулировку заслонок подбарабанья.
Для оптимизации общего процесса обработки диспетчер 28 процессов координирует устройства 20 автоматической регулировки в отношении осуществления частных процессов обработки. При этом диспетчер 28 процессов выполнен с возможностью скоординированного управления одним или несколькими устройствами 20 автоматической регулировки и, в зависимости от рабочей ситуации, смещения весового коэффициента достижения или соблюдения параметров качества процесса, заданных в рамках выбранной частной стратегии 26b по меньшей мере одного устройства 20 автоматической регулировки. При этом допускается неоптимальная работа по меньшей мере одного рабочего агрегата 16, если это способствует оптимизации общего процесса обработки. Помимо автономного задания отличающихся частных стратегий 26b, диспетчер 28 процессов может автономно изменять пределы регулировки или целевые значения параметров качества процесса одного или нескольких устройств 20 автоматической регулировки. Так, уменьшение параметра качества процесса «Доля дробленого зерна» достигается путем уменьшения целевого значения параметра качества процесса «Доля зерна» в недомолоте. Это может быть реализовано, например, путем увеличения параметра качества процесса «Чистота», для чего автоматическое устройство 24 очистки, назначенное очищающему устройству 6, соответствующим образом изменяет один или несколько параметров регулировки, в частности, размер отверстий решета. Другим примером служит снижение параметра качества процесса «Предел потерь», который может иметь различные выражения для различных рабочих агрегатов 16, при достижении другого предела параметров качества процесса или параметров регулировки, в частности, достижения максимальной нагрузки на двигатель.
Кроме того, диспетчер 28 процессов выполнен с возможностью оптимизации общего процесса обработки во время эксплуатации зерноуборочного комбайна 1 в режиме неполной загрузки. Например, если зерноуборочный комбайн 1 движется по убираемому полю со скоростью, которая на единицу ниже возможной максимальной производительности уборки культуры, в то время как оператор выбрал стратегию уборочного процесса «Максимальная производительность», диспетчер 28 процессов использует доступные ресурсы рабочих агрегатов 16, чтобы изменить их заданные частные стратегии 26b и приоритеты. В ходе этого процесса диспетчер 28 процессов может изменять целевые значения параметров качества процесса «Предел потерь» или «Доля дробленого зерна», чтобы повысить качество обработки потока EG убираемой культуры.
На фигуре 4 в качестве примера представлена схематичная визуализация пользовательского интерфейса посредством графического интерфейса 14 пользователя, предназначенного для отображения и настройки выбранной заданной стратегии 26а уборочного процесса или частной стратегии 26b и по меньшей мере одного соответствующего параметра качества процесса, например, чистоты (в представленном варианте осуществления). Альтернативный вариант осуществления виртуального элемента 29 управления в представленном варианте осуществления выполнен в виде ползунка с единственным виртуальным элементом 32 регулировки. Также возможно исполнение виртуального элемента 29 управления в виде поворотного регулятора. Например, из выбранной заданной стратегии 26а уборочного процесса следует наличие индикатора 30 параметра качества процесса «Высокая чистота» и индикатора 31 параметра качества процесса «Высокая производительность». При этом индикаторы 30, 31 могут быть выполнены в виде активируемых кнопок, нажатие которых изменяет положение виртуального элемента 32 регулировки.
Кроме того, в качестве альтернативного варианта осуществления показан другой виртуальный управляющий элемент 34, также выполненный в виде ползунка, визуализируемый индикаторами 30, 31 параметров качества процесса «Высокая чистота» и «Высокая производительность» и позволяющий регулировать их. Для этого виртуальный управляющий элемент 34 содержит два виртуальных элемента 35 и 36 регулировки. При этом виртуальный элемент 35 регулировки отражает минимальное значение предела регулировки параметра качества процесса «Высокая чистота», визуализируемого индикатором 30, в то время как другой виртуальный элемент 36 регулировки отражает максимальное значение предела регулировки параметра качества процесса «Высокая чистота». Настройка или корректировка пределов регулировки в рамках общей оптимизации, как было указано выше, сначала выполняется автономно диспетчером 28 процессов. Кроме того, взаимодействие оператора с диспетчером 28 процессов позволяет оператору изменять весовой коэффициент выбранной стратегии 26а уборочного процесса, для чего оператор сдвигает виртуальный элемент 32 регулировки в направлении стрелки 33 (параметра качества процесса «Высокая чистота») или, как показано в направлении параметра качества процесса «Высокая производительность», визуализируемого индикатором 31, что обозначено штриховым виртуальным элементом 32' регулировки. Итоговое изменение пределов регулировки параметра качества процесса «Высокая чистота», показанное в качестве примера, иллюстрируется штриховыми виртуальными элементами 35' и 36' регулировки.
Изменение пределов регулировки может быть также осуществлено в рамках взаимодействия между оператором и диспетчером 28 процессов, для чего оператор перемещает виртуальный элемент 35 регулировки (минимальное значение предела регулировки) и виртуальный элемент 36 регулировки (максимальное значение предела регулировки) в направлении стрелки 33. Это непосредственное воздействие на пределы регулировки параметра качества процесса «Высокая чистота» учитывается диспетчером 28 процессов в рамках общей оптимизации.
Кроме того, выбирая индикатор 37, 37' тенденции, оператор может задать желаемую тенденцию, которая должна учитываться диспетчером 28 процессов при управлении автоматическим устройством 24 очищающего устройства.
Кроме того, виртуальные управляющие элементы 29 или 34 дополнительно отображают текущее фактическое значение 38 соответствующего параметра качества процесса. Это позволяет оператору своевременно отслеживать влияние или воздействие изменений, внесенных им в рамках взаимодействия с диспетчером 28 процессов.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 зерноуборочный комбайн
2 навесной агрегат 2а ножевой брус
2b мотовило
2с втягивающий шнек
3 наклонная камера
4 молотильное устройство
4а молотильный барабан
4b подбарабанье
5 сепарирующее устройство
6 очищающее устройство 6а воздуходувное устройство
6b верхнее решето
6с нижнее решето
7 измельчающее и распределительное устройство
7а устройство транспортировки мякины
7b измельчающее устройство
7с распределительное устройство
8 транспортная доска
9 транспортная доска обратного хода
10 транспортировочное устройство
11 зерновой бункер
12 заслонка для соломы
13 кабина оператора
14 интерфейс пользователя
15 система шин
16 рабочий агрегат
17 средство обработки убираемой культуры
18 система помощи водителю
19 система датчиков
20 устройство автоматической регулировки
21 автоматическое устройство навесного агрегата
21а автоматическое устройство мотовила
21b автоматическое устройство втягивающего валка
22 автоматическое устройство молотильного устройства
23 автоматическое устройство сепарирующего устройства
24 автоматическое устройство очищающего устройства
25 автоматическое устройство распределительного устройства
26 запоминающее устройство
26а заданная стратегия уборочного процесса
26b частная стратегия
27 вычислительное устройство
28 диспетчер процессов
29 виртуальный ползунок
30 индикатор
31 индикатор
32, 32' виртуальный элемент регулировки
33 направление смещения
34 элемент визуализации
35, 35' виртуальный элемент регулировки
36, 36' виртуальный элемент регулировки
37 индикатор тенденции
38 фактическое значение EG поток убираемой культуры
IE входные данные
IА21 выходные данные
IА22 выходные данные
IА23 выходные данные
IА24 выходные данные
IExt внешние данные
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| КОРМОУБОРОЧНЫЙ КОМБАЙН И СПОСОБ ЭКСПЛУАТАЦИИ КОРМОУБОРОЧНОГО КОМБАЙНА | 2019 |
|
RU2786169C2 |
| СПОСОБ РАБОТЫ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2758094C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО УБОРОЧНОГО ПРОЦЕССА | 2018 |
|
RU2765084C2 |
| CИСТЕМА ПОМОЩИ ДЛЯ ВОДИТЕЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2011 |
|
RU2565225C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНОЙ | 2016 |
|
RU2746813C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ЗНАЧЕНИЯ ПАРАМЕТРА УПРАВЛЕНИЯ РАБОЧЕГО АГРЕГАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ, УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ АГРЕГАТОМ И УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2006 |
|
RU2403698C2 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2612444C2 |
Изобретение относится к сельскому хозяйству. Зерноуборочный комбайн содержит рабочие агрегаты для выполнения определенных частных процессов обработки общего процесса обработки для переработки убираемой культуры, систему помощи водителю для управления рабочими агрегатами, содержащую запоминающее устройство для сохранения данных, касающихся параметров по меньшей мере одного процесса регулирования, и вычислительное устройство для обработки данных, сохраненных в запоминающем устройстве, а также графический интерфейс пользователя. Система помощи водителю вместе с соответствующими рабочими агрегатами, предусмотренными для выполнения определенных частных процессов обработки, образует автономные устройства автоматической регулировки, служащие для оптимизации управления рабочими агрегатами для осуществления частных рабочих процессов. Система помощи водителю дополнительно содержит диспетчер процессов, выполненный с возможностью управления автономными устройствами автоматической регулировки и обменом данными между автономными устройствами автоматической регулировки. Диспетчер процессов выполнен с возможностью взаимодействия с оператором. Посредством указанного взаимодействия предусмотрена возможность редактирования по меньшей мере одного параметра по меньшей мере одного процесса регулирования, сохраненного диспетчером процессов в запоминающем устройстве в целях управления. Диспетчер процессов выполнен с возможностью автономной оптимизации общего процесса обработки зерноуборочного комбайна в соответствии с заданной стратегией уборочного процесса путем согласованного управления автономными устройствами автоматической регулировки. Каждое автономное устройство автоматической регулировки получает входные данные и автономно генерирует выходные данные, характерные для соответствующего рабочего агрегата, из входных данных. Выходные данные используются для изменения параметров регулировки рабочих агрегатов. Обеспечивается снижение нагрузки на оператора при общем управлении машиной. 21 з.п. ф-лы, 4 ил.
1. Зерноуборочный комбайн (1), содержащий: рабочие агрегаты (16) для выполнения определенных частных процессов обработки общего процесса обработки для переработки убираемой культуры, систему (18) помощи водителю для управления рабочими агрегатами (16), содержащую запоминающее устройство (26) для сохранения данных (26a, 26b), касающихся параметров по меньшей мере одного процесса регулирования, и вычислительное устройство (27) для обработки данных (26a, 26b), сохраненных в запоминающем устройстве (26), а также графический интерфейс (14) пользователя, отличающийся тем, что система (18) помощи водителю вместе с соответствующими рабочими агрегатами (16), предусмотренными для выполнения определенных частных процессов обработки, образует автономные устройства (20) автоматической регулировки, служащие для оптимизации управления рабочими агрегатами (16) для осуществления частных рабочих процессов, причем система (18) помощи водителю дополнительно содержит диспетчер (28) процессов, выполненный с возможностью управления автономными устройствами (20) автоматической регулировки и обменом данными между автономными устройствами (20) автоматической регулировки, причем диспетчер (28) процессов выполнен с возможностью взаимодействия с оператором, причем посредством указанного взаимодействия предусмотрена возможность редактирования по меньшей мере одного параметра по меньшей мере одного процесса регулирования, сохраненного диспетчером (28) процессов в запоминающем устройстве (26) в целях управления, причем диспетчер (28) процессов выполнен с возможностью автономной оптимизации общего процесса обработки зерноуборочного комбайна (1) в соответствии с заданной стратегией (26a) уборочного процесса путем согласованного управления автономными устройствами (20) автоматической регулировки, причем каждое автономное устройство (20) автоматической регулировки получает входные данные и автономно генерирует выходные данные, характерные для соответствующего рабочего агрегата, из входных данных, при этом выходные данные используются для изменения параметров регулировки рабочих агрегатов.
2. Комбайн (1) по п. 1, отличающийся тем, что для выполнения определенного частного процесса обработки сохранены различные частные стратегии (26b), которые могут использоваться соответствующими автономными устройствами (20) автоматической регулировки для оптимизации назначенного им рабочего агрегата (16).
3. Комбайн (1) по п. 1 или 2, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью скоординированного управления по меньшей мере одним автономным устройством (20) автоматической регулировки и, в зависимости от рабочей ситуации, осуществления смещения весового коэффициента при достижении или поддержании параметров качества процесса по меньшей мере одного автономного устройства (20) автоматической регулировки.
4. Комбайн (1) по п. 3, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью управления смещением весового коэффициента по меньшей мере одного автономного устройства (20) автоматической регулировки таким образом, чтобы соответствующий рабочий агрегат (16), управляемый автономным устройством (20) автоматической регулировки, эксплуатировался вне соответствующего оптимального эксплуатационного режима.
5. Комбайн (1) по п. 3 или 4, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью автономного задания частных стратегий (26b), на основании которых автономные устройства (20) автоматической регулировки могут управлять соответствующими рабочими агрегатами (16).
6. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью автономного задания пределов регулировки, в рамках которых автономные устройства (20) автоматической регулировки могут управлять соответствующими рабочими агрегатами (16).
7. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью автономного задания целевых значений параметров качества процесса, в рамках которых автономные устройства (20) автоматической регулировки могут управлять рабочими агрегатами (16).
8. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью оптимизации общего процесса обработки при эксплуатации зерноуборочного комбайна (1) в режиме неполной нагрузки.
9. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что для отражения функциональных взаимосвязей частного процесса обработки, осуществляемого одним из рабочих агрегатов (16), по меньшей мере одному параметру качества процесса назначено по меньшей мере одно адаптивное поле характеристик, причем указанный по меньшей мере один параметр качества процесса определен в качестве выходной величины по меньшей мере одного поля характеристик.
10. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью приема внешних данных (IExt), влияющих на параметры качества частных процессов обработки.
11. Комбайн (1) по п. 10, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью автономного принятия мер в зависимости от принятых внешних данных (IExt).
12. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что в качестве рабочих агрегатов (16) предусмотрены по меньшей мере один навесной агрегат (2), молотильное устройство (4), сепарирующее устройство (5), очищающее устройство (6) и распределительное устройство (7).
13. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что в качестве автономных устройств (20) автоматической регулировки предусмотрены по меньшей мере одно автоматическое устройство (21) навесного агрегата, автоматическое устройство (22) молотильного устройства, автоматическое устройство (23) сепарирующего устройства, автоматическое устройство (24) очищающего устройства и автоматическое устройство (25) распределительного устройства.
14. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере одно автономное устройство (20) автоматической регулировки содержит по меньшей мере два вспомогательных устройства (21a, 21b) автоматической регулировки.
15. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью приема в качестве внешних данных (IExt) и настройки по меньшей мере одной заданной стратегии (26a) уборочного процесса и/или параметра качества процесса посредством взаимодействия с оператором.
16. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью взаимодействия с оператором посредством голосового управления.
17. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью регистрации и анализа непосредственного или опосредованного взаимодействия между системой (18) помощи водителю и оператором.
18. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью самостоятельного вступления во взаимодействие с оператором на основании проверки достоверности и/или вследствие анализа общей настройки машины.
19. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что диспетчер (28) процессов выполнен с возможностью управления графическим интерфейсом (14) пользователя при изменении оператором заданной стратегии (26a) уборочного процесса или частной стратегии (26b) для визуализации итоговых изменений пределов (35, 35’; 36, 36’) регулировки по меньшей мере одного параметра качества процесса.
20. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что графический интерфейс (14) пользователя выполнен с возможностью визуализации пределов (35, 35’; 36, 36’) регулировки на основании абсолютных значений по меньшей мере одного параметра качества процесса.
21. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что графический интерфейс (14) пользователя выполнен с возможностью визуализации тенденции по меньшей мере одного параметра качества процесса.
22. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что графический интерфейс (14) пользователя выполнен с возможностью дополнительного отображения текущего фактического значения (38) по меньшей мере одного параметра качества процесса.
| US 2015046043 A1, 12.05.2015 | |||
| US 6119442 A, 19.09.2000 | |||
| US 2003014171 A1, 16.01.2003 | |||
| DE 102013106133 A1, 12.06.2014 | |||
| EP 1543712 A1, 22.06.2005 | |||
| Винтовой питатель непрерывного действия к варочным аппаратам и гидролизерам, для подачи в них кусковых материалов (опилок, щепы к т.д..) | 1956 |
|
SU106075A1 |
| Устройство для увлажнения воздуха | 1940 |
|
SU69913A1 |

