Изобретение относится к области спорта, а именно к способам и устройствам, предназначенным для обучения спортсменов методике и навыкам правильного выполнения спортивных упражнений [A63B 22/00, A61B 5/16].
Из уровня техники известно УСТРОЙСТВО И СПОСОБ ВОЗДЕЙСТВИЯ НА МОТОРНЫЙ АВТОМАТИЗМ ЧЕЛОВЕКА [RU 2437685 C2, опубл.: 20.05.2020], отличающийся тем, что включает, по меньшей мере, один рабочий сеанс, включающий следующие операции:
- генерируют серию звуковых импульсов (SPi), каждый из которых соответствует частотному интервалу 200-1500 Гц и длительности (Т), составляющей 2-20 с, причем временной интервал (ΔT) между указанными импульсами составляет 2-60 с.;
- после того как человек мысленно создал образ желательного жеста или движения, сопровождаемый ассоциированными кинестетическими ощущениями, прерывают генерирование звуковых импульсов, чтобы осуществить генерирование, по меньшей мере, одного ассоциированного с кинестетическими ощущениями звука (SA), соответствующего частоте в интервале 2-200 Гц и длительности, составляющей 2-60 с.;
- и, по завершении генерирования ассоциированного с кинестетическими ощущениями звука (SA), возобновляют генерирование указанных звуковых импульсов (SPi).
Способ по изобретению осуществляется путем реализации следующего протокола, разбитого на четыре фазы:
1. Анализ движения:
a) получение снимков субъекта (например спортсмена) в движении;
b) анализ тренером техники исполнения;
c) биомеханический анализ;
d) проприоцептивный анализ.
2. Идентификация субъектом проприоцептивных ощущений, соответствующих анализируемому жесту, путем его повторений в замедленном темпе до тех пор, пока он не будет способен запомнить и мысленно воспроизвести указанные ощущения (без физического воспроизведения жеста).
3. Сеанс нейрофизиологической модификации жеста с использованием генератора звуковых импульсов:
a) субъект прекращает физическую активность и приходит в расслабленное состояние, прослушивая звуковые импульсы (SPi);
b) производится модифицирование жеста путем взаимного наложения ассоциированного звука (SA), контролируемого субъектом, и мысленно сформированных (без реального воспроизведения) проприоцептивных ощущений, проанализированных и идентифицированных в фазах 1 и 2.
4. Получение, в тех же условиях, что и в фазе 1, снимков субъекта в движении и видеоанализ освоенного модифицированного жеста.
Недостатком аналога является отсутствие визуализации выполнения движений спортсменом, что значительно ухудшает скорость обучение спортсмена.
Наиболее близким по технической сущности является УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И КОНТРОЛЯ ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ СПОРТСМЕНА [SU 1745207 A1, опубл.: 07.07.1992], содержащее последовательно соединенные пульт управления, блок памяти, компаратор, блок регистрации, блок корректирующих воздействий, тренажер с датчиками биомеханических характеристик с индикацией, выход которого соединен с вторым входом компаратора, второй выход блока корректирующих воздействий соединен с вторым входом тренажера с датчиками биомеханических характеристик, отличающееся тем, что с целью ускорения обучения путем адаптации действий испытуемого к модели движения в него введены последовательно соединенные блок отображения видеограмм и счетчик видеограмм, выход которого соединен с входом пульта испытуемого, второй выход которого соединен с первым входом блока отображения видеограмм, второй вход которого соединен с вторым входом блока корректирующих воздействий.
Основной технической проблемой прототипа является отсутствие визуализации выполнения движений спортсменом, что значительно ухудшает качество и скорость обучения спортсмена из-за необходимости интуитивного домысливания и самостоятельного доведения техники выполнения упражнения до правильной, либо привлечения для этого тренера.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение скорости и качества самостоятельного обучения спортсмена технике выполнения упражнений.
Указанный технический результат достигается за счет того, что способ самостоятельного обучения технике выполнения упражнений, отличающееся тем, что исходя из выбранного для обучения упражнения снимают необходимые индивидуальные антропометрические показатели спортсмена, фиксируют на теле обучаемого датчики, регистрирующие динамические и кинематические показатели обучаемого, при выполнении упражнения формируют в области видимости обучаемого изображения эталонных значений показателей и действительных значений показателей, полученных с помощью датчиков, сравнивают упомянутые показатели и при их расхождении оповещают обучаемого о необходимости корректировки действий при выполнении упражнения для доведения действительных показателей до эталонных значений, при этом при регистрации кинематических показателей изображения эталонных и действительных значений показателей предпочтительно выполняют в виде наложенных друг на друга фото-видеоизображений силуэтов правильно выполняющего упражнение и обучаемого, при корректировке действий обучаемый руководствуется изображениями.
Указанный технический результат достигается за счет того, что устройство самостоятельного обучения технике выполнения упражнений, содержащее блок управления, блок памяти, компаратор, блок сбора данных, блок корректирующих воздействий, биомеханические датчики и интерфейсный модуль, отличающееся тем, что датчики подключены к блоку управления через последовательно соединенные блок сбора данных и компаратор, при этом датчики снабжены обратной связью с телом спортсмена, другой выход блока сбора данных соединен с блоком управления через блок моделирования, ко входу блока управления подключен блок ввода данных, а интерфейсный модуль соединен одним каналом с блоком управления через блок синхронизации, а другим через блок корректирующих воздействий.
В частности, интерфейсный модуль выполнен в виде устройства отображения изображения спортсмена и вывода эталонного изображения.
В частности, обратная связь датчиков выполнена в виде электромеханических стимуляторов.
В частности, блок управления выполнен на базе контроллера.
В частности, блок ввода данных выполнен в виде устройств для ввода информации.
Краткое описание чертежей
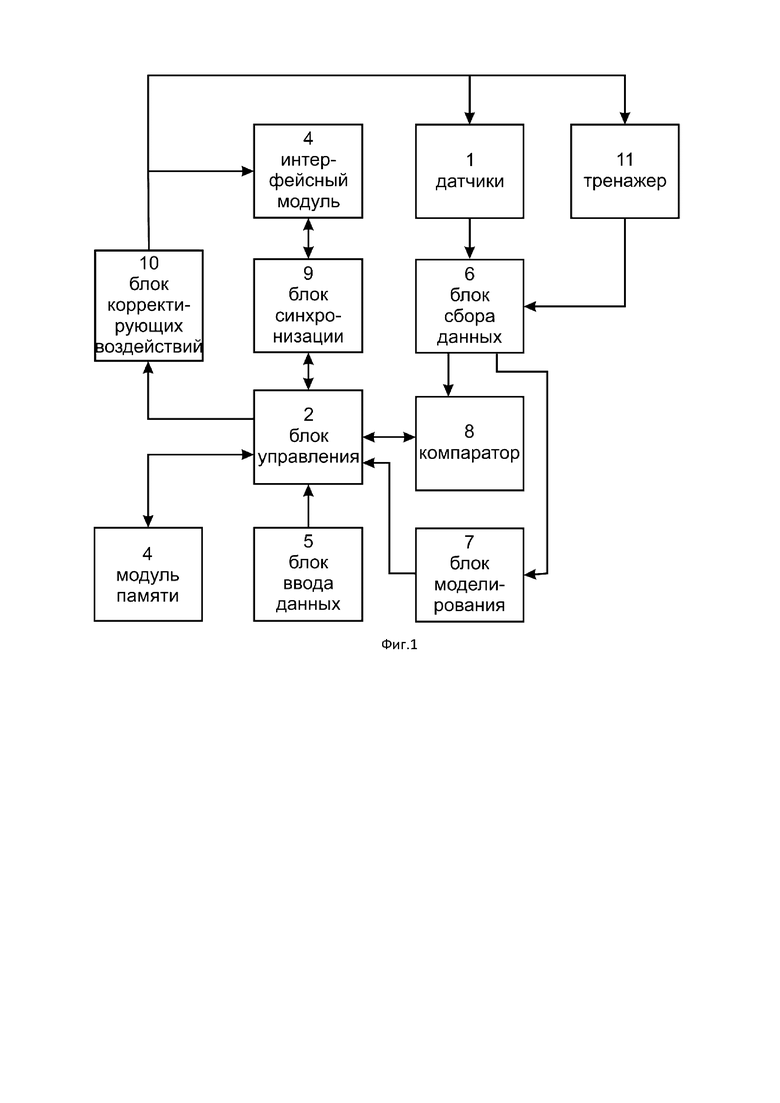
На фиг. 1 показано схематичное изображение устройства самостоятельного обучения технике выполнения упражнений.
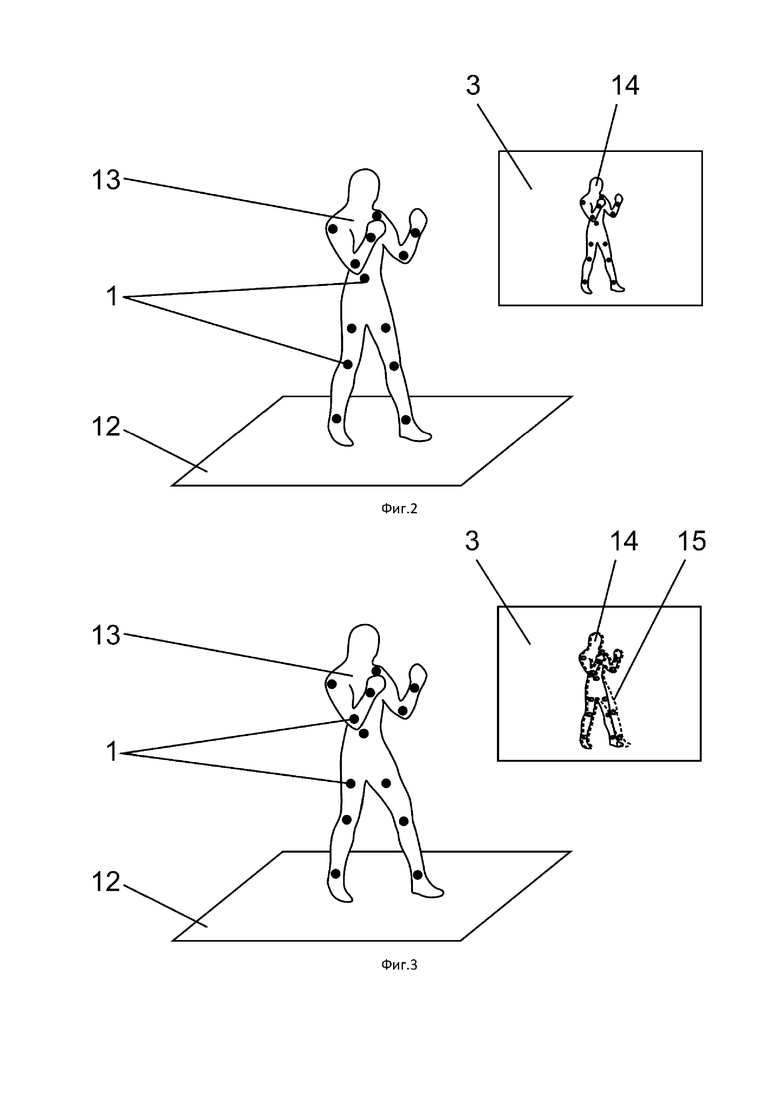
На фиг. 2 схематично показано изображение спортсмена при его самостоятельном обучении технике занятия типовой позиции в боксе.
На фиг. 3 схематично показано изображение спортсмена при его самостоятельном обучении технике занятия типовой позиции в боксе с ошибкой в выполнении упражнения.
На фигурах обозначено: 1 - датчики, 2 - блок управления, 3 - интерфейсный модуль, 4 - модуль памяти, 5 - блок ввода данных, 6 - блок сбора данных, 7 - блок моделирования, 8 - компаратор, 9 - блок синхронизации, 10 - блок корректирующих воздействий, 11 - тренажер, 12 - площадка, 13 - спортсмен, 14 - изображение боксера, 15 - изображение спортсмена.
Осуществление изобретения
Устройство самостоятельного обучения технике выполнения упражнений содержит датчики 1 (см. Фиг. 1), блок управления 2 и интерфейсный модуль 3. К блоку управления 2 подключен модуль памяти 4 и блок ввода данных 5. Датчики 1 подключены ко входу блока сбора данных 6, выход которого соединен с блоком моделирования 7. К выходу блока моделирования 7 подключен компаратор 8, соединенный с блоком управления 2. К выходу блока управления 2 подключен блок синхронизации 9, соединенный со входом интерфейсного модуля 3. Другой выход блока управления 2 соединен с блоком корректирующих воздействий 10. Выходы блока корректирующих воздействий 10 соединены с интерфейсным модулем 3 и датчиками 1.
Интерфейсный модуль 3 выполнен в виде, например, интерактивного дисплея, экрана телевизора, монитора или проекционного экрана.
Датчики 1 выполнены в виде набора миографических, и/или пространственных, и/или спирометрических датчиков, и/или тензодатчиков, и/или датчиков давления и т.д. Предпочтительно, датчики 1 снабжены элементами обратной связи с пользователем, например, электрическими контактами, элементами вибрации и т.д. с возможностью взаимодействия с пользователем и указанием датчика, на которое необходимо обратить внимание.
Блок управления 2 выполнен на базе контроллера.
Блок ввода данных 5 выполнен в виде устройств для ввода информации, например, механическая или сенсорная клавиатура и т.д.
Способ самостоятельного обучения технике выполнения упражнений реализуют следующим образом.
Первоначально снимают индивидуальные антропометрические показатели спортсмена, такие как, тотальные размеры и пропорции тела и записывают их в модуль памяти 4 через блок управления 2 с помощью блока ввода данных 5.
Из модуля памяти 4 с помощью интерфейсного модуля 3 выбирают упражнение, которому планируют обучать спортсмена.
На теле спортсмена в различных местах фиксируют датчики 1. Присваивают каждому датчику 1 идентификатор, например, номер или название.
Спортсмен становится на тренажере 11, выполненном, например, в виде беговой дорожки, площадки для отработки приемов контактных видов спорта (бокс, рукопашный бок, восточные единоборства и т.д.) и другого спортивного оборудования, предназначенного для спортивных занятий и занимает исходную позицию. Производят калибровку датчиков 1 с возможностью записи в модуль памяти 4 их нулевых положений и крайних отклонений от нулевых при выполнении упражнения, соответствующих правильному положению корпуса тела и конечностей спортсмена, силе напряжения мышц, давления на элемент тренажера и т.д. Данные нулевых положений и крайних отклонений датчиков 1 записывают в модуль памяти 4.
Запускают при необходимости тренажер 11 и приступают к выполнению упражнения.
С блока управления 2 из модуля памяти 4 через блок синхронизации 9 на интерфейсный модуль 3 выводят эталонное статическое или динамическое изображение, содержащее силуэт образцового спортсмена, правильно выполняющего упражнение.
При выполнении упражнения спортсменом сигналы с датчиков 1 передают через блок сбора данных 6 в компаратор 8 и в блок моделирования 7.
В блоке моделирования 7 с помощью полученных значений сигналов в реальном режиме времени моделируют положение корпуса тела и конечностей, давление на элемент тренажера (площадки), силу напряжения мышц спортсмена и формируют статическое или динамическое изображение силуэта спортсмена в действительном положении, которое через блок управления 2 передают на блок синхронизации 9.
В блоке синхронизации 9 при получении действительного изображения спортсмена при наличии временной задержки относительно эталонного изображения, рассчитывают временную задержку и вводят поправку на передачу для наложения действительное изображения на эталонное на экране интерфейсного модуля 3.
В компараторе 8 сравнивают сигналы, полученные с датчиков 1 с эталонными значениями, записанными в модуле памяти 4. При значительном отклонении полученных значений сигналов от эталонных (неправильном выполнении упражнения) с компаратора 8 на блок управления 2 поступает сигнал, который останавливает эталонное изображение (стоп-кадр) и через блок корректирующих воздействий 10 формирует и подает сигнал спортсмену на интерфейсный модуль 3, например, в виде светового или звукового сигнала. Также сигнал о неправильном выполнении упражнения могут подавать на датчики 1, снабженные обратной связью, например, в виде электрического импульса или вибрации. Дополнительно сигнал о неправильном выполнении упражнения могут подавать на тренажер 11 при наличии на тренажере 11 встроенных датчиков (на фигурах не показаны).
При получении сигнала о неправильном выполнении упражнения спортсмен немедленно вносит поправки в свои действия, которые в виде изображения в соответствии с описанным выше способом он может видеть в режиме реального времени на интерфейсном модуле 3 и тем самым быстро добиться правильного выполнения упражнения, запоминая свои ошибки и тем самым осуществлять самообучение. При правильном выполнении упражнения (движения) показ эталонного изображения возобновляется.
Покажем вариант использования устройства на примере обучения спортсмена технике занятия типовой позиции в боксе.
Позицией называется исходное положение, принимаемое боксером в начале боя и сохраняемое им в течение всего боя между моментами атаки и защиты. Позиция имеет своей задачей создать наиболее выгодное положение для нападения и защиты и дать возможность боксеру сохранить полную подвижность. Поэтому правильной позицией может быть названа только та, которая способствует быстрому нанесению удара и перемещению боксера вперед, назад и в стороны.
Для обучения технике занятия типовой позиции в боксе из модуля памяти 4 с помощью интерфейсного модуля 3 выбирают упражнение для обучения типовой позиции и выводят статическое изображение боксера 14 на интерфейсный модуль 2 (см. Фиг. 2). В этом изображении ступня левой ноги боксера направлена вперед, пятка несколько повернута наружу, правая нога отставлена на полшага назад и вправо, ступня почти параллельна левой ступне и несколько приподнята. Колено правой ноги немного согнуто, тяжесть тела равномерно распределена на обе ноги. Корпус обращен вполоборота к противнику, левое плечо впереди и немного выше правого. Поясница не напряжена и немного согнута. Левая рука полусогнута, часть руки от плеча до локтя защищает левую сторону груди и сердце, предплечье направлено на противника, кулак составляет прямое продолжение предплечья и находится не ниже солнечного сплетения и не выше левого плеча. Тыловая сторона кулака направлена наружу. Правая рука полусогнута, часть руки от плеча до локтя защищает правую сторону груди, предплечье защищает печень и солнечное сплетение, кулак находится не ниже левого соска и не выше подбородка. Тыловая сторона кулака обращена наружу. Голова повернута вполоборота налево и несколько наклонена вниз. Подбородок опущен, но не прижат к груди.
Далее измеряют вес, рост, длины плеча и предплечья, бедра и голени, расстояния от темени до талии и от талии до ступни спортсмена 13 и записывают их в модуль памяти 4, при этом блок управления 2 корректирует изображение боксера 14 на интерфейсном модуле 2 приводя его силуэт к пропорциям спортсмена 13 в масштабе.
В соответствии с размещением датчиков 1 на теле боксера, показанных на изображении боксера 14 на интерфейсном модуле 2 (см. Фиг. 2) на каждом из голеностопов, коленях, талии и груди, локтях и запястьях спортсмена 13 устанавливают и фиксируют датчики 1, выполненные пространственными, при этом каждый из датчиков 1 имеет индивидуальный идентификатор в соответствии с его положением на теле спортсмена 13.
Предпочтительно, в качестве первичного показа, спортсмену 13 показывают методику выполнения упражнения в полном объеме, от начала до конца.
Далее, спортсмен 13 располагается на площадке 12, запускают пошаговое занятие типовой позиции и спортсмен 13 выполняет упражнение вслед за эталонным изображением боксера 14, повторяя движения боксера, фиксируя положения ног, рук, корпуса тела. С датчиков 1 в компаратор 8 и блок моделирования 7 передают сигнал об их положениях в пространстве и соответственно положении тела спортсмена 13.
В блоке моделирования 7 по полученным сигналам о пространственном положении датчиков 1 формируют действительное статическое или динамическое изображение силуэта спортсмена 15 и транслируют изображение на интерфейсном модуле 3.
В компараторе 8 сравнивает действительные сигналы от датчиков 1 с эталонными значениями, записанными в модуле памяти 4 для типовой позиции боксера и при значительном отклонении действительных значений от эталонных, подают сигнал на блок управления 2 о неправильном положении конкретного датчика 1.
Например, спортсмен 13 слишком широко расставил ноги (см. Фиг. 3). Значения сигналов с датчиков 1, установленных на голеностопах и коленях спортсмена 13 после обработки в компараторе 8 в этом случае будут существенно отличаться от эталонных значений и компаратор 8 подает сигнал на блок управления 2 о том, что имеется расхождение в показаниях конкретных датчиков 1 с эталонными значениями. Блок управления 2 при этом останавливает эталонное изображение боксера 14 и через интерфейсный модуль 2 информирует спортсмена 13 о неправильной постановке ног в типовой позиции. На интерфейсном модуле 3 при этом отображается изображение спортсмена 15 (показано пунктирной линией), в котором действительное положение ног спортсмена 13 будет отличаться от эталонного изображения положения ног боксера 14.
Спортсмен 13, визуально анализируя свое положение с помощью информации, отображенной на интерфейсном модуле 3, корректирует положение ног до тех пор, пока на интерфейсном модуле 2 не отобразится информация в виде изображения и/или оповещения о занятии правильной типовой позиции.
Далее отрабатывают правильное положение корпуса тела, рук, головы спортсмена 13 с отображением информации, получаемой с датчиком 1 на интерфейсном модуле 3 до тех пор, пока спортсмен 13 не получит навыки в выполнении типовой позиции и не изучит методику выполнения упражнения с минимальным или полным отсутствием ошибок доведя технику выполнения упражнения до совершенства. При этом кроме мыслительных образов и полученной теории, спортсмен для запоминания техники выполнения упражнений использует зрительные образы, построенные на основе полученной визуальной информации, а также реакции мышц на внешние раздражители в виде электромеханических стимуляторов, совмещенных с датчиками 1.
Аналогичным образом могут обучать спортсменов технике любых упражнений или положений при выполнении упражнений и приемов, при этом количество и места установки, а также типы датчиков 1 могут изменяться исходя из принципа минимальной достаточности для получения необходимого результата.
Технический результат изобретения - повышение скорости и качества самостоятельного обучения спортсмена технике выполнения упражнений достигается за счет устранения ошибок выполнении упражнений путем непрерывного показа обучаемому спортсмену при выполнении им упражнения изображения правильного выполнения упражнения (эталонных значений), наложения на него изображения реального выполнения упражнения (действительных значений) спортсменом и оповещения его в режиме реального времени, в том числе с помощью электромеханических стимуляторов, совмещенных с датчиками 1 о допущенных им ошибках (неправильных действий) при выполнении упражнения, тем самым обеспечивая самообучение спортсмена на личном опыте с использованием зрительных образов и реакции мышц без привлечения тренера. При привлечении тренера для обучения спортсмена затрачивается дополнительное время на повторный показ, взаимопонимание между тренером и обучаемым спортсменом правильному выполнению упражнения и отрыв тренера от других участников обучения, что существенно снижает возможности обучения как одного, так и группы спортсменов.
Изобретение относится к области спорта, а именно к способам и устройствам, предназначенным для обучения спортсменов методике и навыкам правильного выполнения спортивных упражнений. Технический результат изобретения заключается в повышении скорости и качества самостоятельного обучения спортсмена технике выполнения упражнений и достигается за счет того, что способ самостоятельного обучения технике выполнения упражнений отличается тем, что исходя из выбранного для обучения упражнения снимают необходимые индивидуальные антропометрические показатели спортсмена, фиксируют на теле обучаемого датчики, регистрирующие динамические и кинематические показатели обучаемого, при выполнении упражнения формируют в области видимости обучаемого изображения эталонных значений показателей и действительных значений показателей, полученных с помощью датчиков, сравнивают упомянутые показатели и при их расхождении оповещают обучаемого о необходимости корректировки действий при выполнении упражнения для доведения действительных показателей до эталонных значений, при этом при регистрации кинематических показателей изображения эталонных и действительных значений показателей предпочтительно выполняют в виде наложенных друг на друга фото-видеоизображений силуэтов правильно выполняющего упражнение и обучаемого, при корректировке действий обучаемый руководствуется изображениями. 2 н. и 4 з.п. ф-лы, 3 ил.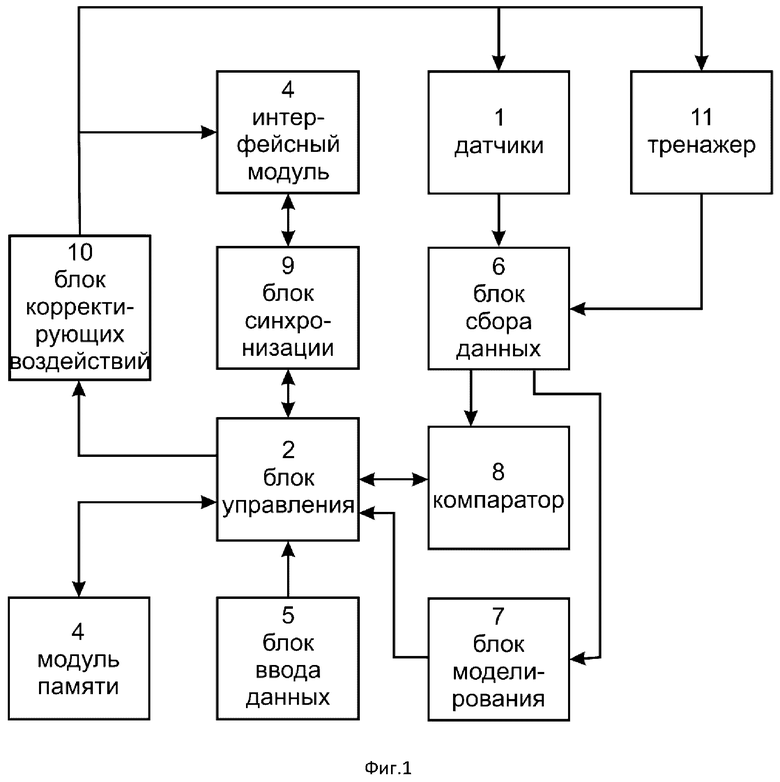
1. Способ самостоятельного обучения технике выполнения упражнений, отличающийся тем, что исходя из выбранного для обучения упражнения снимают необходимые индивидуальные антропометрические показатели спортсмена, фиксируют на теле обучаемого датчики, регистрирующие динамические и кинематические показатели обучаемого, при выполнении упражнения формируют в области видимости обучаемого изображения эталонных значений показателей и действительных значений показателей, полученных с помощью датчиков, сравнивают упомянутые показатели и при их расхождении оповещают обучаемого о необходимости корректировки действий при выполнении упражнения для доведения действительных показателей до эталонных значений, при этом при регистрации кинематических показателей изображения эталонных и действительных значений показателей предпочтительно выполняют в виде наложенных друг на друга фото-видеоизображений силуэтов правильно выполняющего упражнение и обучаемого, при корректировке действий обучаемый руководствуется изображениями.
2. Устройство самостоятельного обучения технике выполнения упражнений, содержащее блок управления, блок памяти, компаратор, блок сбора данных, блок корректирующих воздействий, биомеханические датчики и интерфейсный модуль, отличающееся тем, что датчики подключены к блоку управления через последовательно соединенные блок сбора данных и компаратор, при этом датчики снабжены обратной связью с телом спортсмена, другой выход блока сбора данных соединен с блоком управления через блок моделирования, ко входу блока управления подключен блок ввода данных, а интерфейсный модуль соединен одним каналом с блоком управления через блок синхронизации, а другим через блок корректирующих воздействий.
3. Устройство по п. 2, отличающееся тем, что интерфейсный модуль выполнен в виде устройства отображения изображения спортсмена и вывода эталонного изображения.
4. Устройство по п. 2, отличающееся тем, что обратная связь датчиков выполнена в виде электромеханических стимуляторов.
5. Устройство по п. 2, отличающееся тем, что блок управления выполнен на базе контроллера.
6. Устройство по п. 2, отличающееся тем, что блок ввода данных выполнен в виде устройств для ввода информации.
| Способ градуировки гамма-дозиметров | 1965 |
|
SU197026A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ТОЛКАТЕЛЕЙ ЯДРА | 2006 |
|
RU2318569C2 |
| Тензометрический кистевой динамометр | 1988 |
|
SU1706651A1 |
| Нагрузочное устройство для спортивных тренажеров | 1989 |
|
SU1718987A1 |
| Устройство для определения фаз ходьбы и бега | 1991 |
|
SU1834671A3 |
| US 9427659 B2, 30.08.2016 | |||
| CN 108697921 A, 23.10.2018. | |||

