Изобретение относится к учебным моделям или тренажерам для обучения управлению транспортными средствами, имеет возможность определения статической нагрузки на колеса и степени влияния перераспределения центра масс, обусловленного изменением положения тела водителя во время движения, на эксплуатационные свойства транспортного средства и может использоваться в качестве тренажера для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом.
Известен стенд для обучения вождению транспортного средства в условиях критических ситуаций, содержащий управляемые с помощью компьютера и электрически связанные между собой: управляющий модуль, модуль органов управления, включающий переключатель привода автомобиля (задний, передний или 4WD), руль и педали; модуль настройки параметров движения, модуль визуализации движения и модуль имитации шумов, при этом вход модуля настройки параметров движения связан с выходом управляющего модуля, формирующего сигнал с помощью генератора случайных чисел, выходы модуля настройки параметров движения связаны с входами модуля визуализации движения, модуля имитации шума и модуля органов управления, в свою очередь выход модуля органов управления связан с входом модуля настройки параметров движения [патент RU 145103 U1, G09B 9/02].
Недостатками данного стенда являются:
невозможность обучения приемам и навыкам управления четырехколесных транспортных средств, имеющих способы управления и посадку «по-мотоциклетному»;
отсутствие учета влияния положения тела водителя и смещения центра масс на показатели эксплуатационных свойств транспортного средства с мотоциклетной посадкой, а также невозможность определения отклонений параметров действий обучаемого от эталонных, обусловленных изменением положения тела водителя при преодолении препятствий, что не обеспечивает эффективности обучения за счет конкретизации ошибок обучаемого в момент их совершения и возможности общей оценки уровня мастерства и профессиональной пригодности водителя четырехколесного внедорожного мототранспортного средства (квадроцикла).
Известен универсальный динамический стенд автомобильного тренажера, включающего систему контроля положения штатных органов управления автомобилем в пространстве, систему визуализации, воспроизводящую дорожную обстановку, в виде, по меньшей мере, фронтального экрана с видеопроектором, размещенных на стойках, и систему управления элементами тренажера в виде блока управления, источника питания и компьютера, содержащий связанные между собой неподвижную и подвижную платформы, из которых последняя снабжена приводами изменения ее положения, а связь неподвижной и подвижной платформ выполнена с помощью карданного шарнира и приводных тяг, связанных с валами приводов изменения положения подвижной платформы, при этом приводы жестко закреплены на нижней платформе, а валы приводов снабжены датчиками их положения, подключенными к блоку управления, причем стенд выполнен с возможностью установки на подвижной платформе в качестве рабочего модуля реального транспортного средства, сменяемого при необходимости, колеса которого отключены от привода транспортного средства, на жестко прикрепленной к подвижной платформе поперечной балке установлен двухступенчатый мультипликатор, сцепная электромуфта которого электрически связанна с блоком управления, а входной вал выполнен заодно с удерживающей колодкой [патент RU 203531 U1,G09B 9/042].
На указанном универсальном динамическом стенде автомобильного тренажера имеется возможность установки в качестве рабочего модуля четырехколесного мототранспортного средства с целью отработки навыков управления транспортным средством с посадкой и управлением «по-мотоциклетному».
Недостатками данного универсального динамического стенда автомобильного тренажера являются отсутствие учета влияния положения тела водителя и смещения центра масс на показатели эксплуатационных свойств транспортного средства с мотоциклетной посадкой, а также невозможность определения отклонений параметров действий обучаемого от эталонных, что не обеспечивает эффективности обучения за счет конкретизации ошибок обучаемого в момент их совершения и возможности общей оценки уровня мастерства и профессиональной пригодности водителя.
Наиболее близким к заявляемому решению (прототипом) является способ обучения вождению боевого транспортного средства, при котором обучаемый занимает учебное место, представляющее собой имитатор рабочего места водителя с органами управления, экраном для проектирования дорожной обстановки в реальном времени и возможностью изменения положения в зависимости от проектируемого изображения, настраивает рабочее место в соответствие с требованиями инструкции по эксплуатации транспортного средства, включает тренажер в работу, при этом на экране проецируется дорожная обстановка, а обучаемый имитирует управление транспортным средством путем воздействия на приборы управления, в соответствие с дорожной обстановкой, выполняемой задачей и показаниями приборов, после приобретения обучаемым первичных навыков вождения, определяемых по правильности выполнения действий, включается режим, при котором действия обучаемого сравниваются с действиями опытного водителя, а отклонение действий обучаемого от действий опытного водителя фиксируются датчиками, о чем обучаемый информируется, при моделировании движения транспортного средства на тренажере задача формируется в виде эталонной поездки на автомобиле из начальной точки маршрута в конечную, обучаемый стремится к однозначному решению стоящей перед ним задачи так, как предложено при эталонном прохождении маршрута, задача будет считаться решенной, если обучаемый выдержит в заданных обучающим пределах по отношению к параметрам, показанным опытным водителем, при контроле и оценке уровня профессиональной подготовки экзаменуемый моделирует реальные условия движения транспортного средства по заданному маршруту с отключенными устройствами сигнализации, оповещающими об отклонениях от эталонных действий, оценку теоретической и практической подготовки обучаемого дают в зависимости от показателей отклонений от эталонных параметров движения, дополнительно предусматривается оснащение обучаемого шлемом в соответствии с амуницией, предусмотренной штатным расписанием, оборудованным наушниками, через которые транслируются звуки боя, одновременно на экран с дорожной обстановкой проецируются изображения возможных боевых воздействий при этом предварительно при прохождении на тренажере того же маршрута опытным специалистом осуществляется измерение и запись изменений его пульса и кровяного давления, при прохождении обучаемым маршрута осуществляется вывод на экран обучающего графиков, согласованных по временной шкале на одном из которых фиксируется особенность и степень боевого воздействия, на втором - сложность преодолеваемой дистанции, выраженная в баллах и соотносящаяся с изображением на экране, а на третьем - показатели кровяного давления обучаемого и его пульса, а также график кровяного давления и пульса опытного водителя, предварительно записанные при прохождении той же дистанции и тренажер для его реализации, содержащий имитатор рабочего места водителя с органами управления и датчиками их положения, имитатор дорожно-транспортной и боевой обстановки, включающий проекционный экран, средства проецирования, систему изменения положения имитатора рабочего места водителя, компьютер, устройство обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, элементы штатной амуниции водителя в виде шлема, оборудованного наушниками по типу транспортного средства, датчик измерения давления и пульса обучаемого, устройство согласования по времени показаний, упомянутых с изменением положения органов управления и сведениями имитатора дорожно-транспортной и боевой обстановки, соединенные таким образом, что компьютер соединен со средства проецирования, устройством обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, и, через устройство согласования по времени показаний с элементами штатной амуниции водителя в виде шлема, оборудованного наушниками по типу транспортного средства и датчиком измерения давления и пульса обучаемого, одновременно устройство обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных подключено к датчикам положения органов управления и системе изменения положения имитатора рабочего места водителя [патент RU 2709344 C1, G09B 9/04].
Недостатками прототипа являются невозможность обучения приемам и навыкам управления четырехколесных транспортных средств, имеющих способы управления и посадку «по-мотоциклетному» и отсутствие в этой связи учета влияния положения тела водителя и смещения центра масс на показатели эксплуатационных свойств транспортного средства с мотоциклетной посадкой, а также невозможность определения отклонений параметров действий обучаемого от эталонных, обусловленных изменением положения тела водителя при преодолении препятствий, что не обеспечивает эффективности обучения за счет конкретизации ошибок обучаемого в момент их совершения и возможности общей оценки уровня мастерства и профессиональной пригодности водителя четырехколесного внедорожного мототранспортного средства, а именно квадроцикла.
Технический результат изобретения направлен на расширение функциональных возможностей способа начального обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом, реализуемого тренажером для обучения вождению, за счет практического изучения способов посадки на транспортное средство в зависимости от характера преодолеваемых препятствий и учета влияния положения тела водителя и смещения центра масс на показатели устойчивости транспортного средства с мотоциклетной посадкой, а также определения отклонений параметров действий обучаемого от эталонных, обусловленных изменением положения тела водителя при преодолении препятствий.
Технический результат достигается тем, что тренажер для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом, содержащий имитатор рабочего места водителя с органами управления и датчиками их положения, имитатор дорожно-транспортной обстановки, включающий проекционный экран, средства проецирования, систему изменения положения имитатора рабочего места водителя, компьютер, устройство обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, элементы амуниции водителя в виде шлема, оборудованного наушниками, соединенные таким образом, что компьютер соединен со средствами проецирования, устройством обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, и с элементами штатной амуниции водителя в виде шлема, оборудованного наушниками, одновременно устройство обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных подключено к датчикам положения органов управления и системе изменения положения имитатора рабочего места водителя, дополнительно оборудован датчиками определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам, соединенными с устройством обработки сигналов датчиков, а имитатор рабочего места водителя оборудован сиденьем с мотоциклетной посадкой, двумя подножками, на одной из которых установлена педаль управления тормозами, рулем мотоциклетного типа с расположенными на нем органами управления и рулевым валом, оснащенным датчиком угла и скорости поворота руля, соединенным с устройством обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, и нагрузочным узлом, имитирующим сопротивление повороту управляемых колес и соединенным с компьютером, оснащенным устройством ввода данных, при этом экран тренажера выполнен с возможностью демонстрирования изображения, подсказывающего обучаемому, какое положение тела при посадке он должен занять на месте водителя при преодолении соответствующего вида препятствия, а способ использования тренажера для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом, при котором обучаемый занимает учебное место, представляющее собой имитатор рабочего места водителя с органами управления, экраном для проектирования дорожной обстановки в реальном времени и возможностью изменения положения в зависимости от проецируемого изображения, настраивает рабочее место в соответствии с требованиями инструкции по эксплуатации транспортного средства, включает тренажер в работу, при этом на экране проецируется дорожная обстановка, а обучаемый имитирует управление транспортным средством путем воздействия на приборы управления, в соответствии с дорожной обстановкой, выполняемой задачей и показаниями приборов, после приобретения обучаемым первичных навыков вождения, определяемых по правильности выполнения действий, включается режим, при котором действия обучаемого сравниваются с действиями опытного водителя, а отклонение действий обучаемого от действий опытного водителя фиксируется датчиками, о чем обучаемый информируется, при моделировании движения транспортного средства на тренажере задача формируется в виде эталонной поездки на транспортном средстве из начальной точки маршрута в конечную, обучаемый стремится к однозначному решению стоящей перед ним задачи так, как предложено при эталонном прохождении маршрута, задача будет считаться решенной, если обучаемый выдержит в заданных обучающим пределах по отношению к параметрам, показанным опытным водителем, при контроле и оценке уровня профессиональной подготовки экзаменуемый моделирует реальные условия движения транспортного средства по заданному маршруту с отключенными устройствами сигнализации, оповещающими об отклонениях от эталонных действий, оценку теоретической и практической подготовки обучаемого дают в зависимости от показателей отклонений от эталонных параметров движения, предусматривается оснащение обучаемого шлемом, оборудованным наушниками, через которые транслируются звуки, одновременно на экран с дорожной обстановкой проецируются изображения возможных действий, при прохождении обучаемым маршрута осуществляется вывод на экран обучающего графиков, согласованных по временной шкале на одном из которых фиксируется особенность и степень воздействия, на втором - сложность преодолеваемой дистанции, выраженная в баллах и соотносящаяся с изображением на экране, дополнительно предусматривает то, что после размещения обучаемого на тренажере посредством датчиков определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам производится определение массы водителя, корректировка полной массы выбранного транспортного средства и координат центра масс при прямой посадке водителя, в ходе приобретения обучаемым первичных навыков вождения перед прохождением заданного маршрута, с обучаемым изучаются и практически осваиваются способы посадки на транспортном средстве в зависимости от характера преодолеваемых на маршруте препятствий: спусков, подъемов, косогоров, неровностей, радиусов кривизны, когда обучаемый приобретает практические навыки изменения положения тела при посадке на транспортном средстве во время движения по преодолеваемым препятствиям, которые имитируются изменением положения рабочего места водителя с мотоциклетной посадкой, мотоциклетным рулем и подножками, при этом на начальном этапе освоения способов посадки перед обучаемым на экране проецируется вид препятствия из реальной дорожной обстановки и силуэт положения тела водителя, соответствующего правильной его посадке применительно к преодолеваемому виду препятствия, что сопровождается соответствующим изменением положения рабочего места водителя, после приобретения обучаемым практических навыков изменения положения тела при посадке на транспортном средстве, режим подсказки, когда на экране проецируется правильная посадка, отключается и включается режим, при котором действия обучаемого при выборе посадки сравниваются с действиями опытного водителя, а отклонения действий обучаемого при выборе посадки, соответствующей виду препятствия, от действий опытного водителя фиксируются датчиками, о чем обучаемый информируется, если действия обучаемого при выборе посадки при заданных обучающим условий соответствуют эталонным параметрам, то обучающий моделирует реальные условия движения транспортного средства по заданному маршруту с отключенными устройствами сигнализации, оповещающими об отклонениях от действий опытного водителя, при этом состояние рулевого вала идентифицируется соответствующими датчиками угла и скорости поворота руля, а имитация сопротивления повороту управляемых колес осуществляется с помощью нагрузочного узла, размещенного на рулевом валу и соединенного с компьютером.
Отличительными признаками от прототипа является то, что тренажер для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом дополнительно оборудован датчиками определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам, соединенными с устройством обработки сигналов датчиков, а имитатор рабочего места водителя оборудован сиденьем с мотоциклетной посадкой, двумя подножками, на одной из которых установлена педаль управления тормозами, рулем мотоциклетного типа с расположенными на нем органами управления и рулевым валом, оснащенным датчиком угла и скорости поворота руля, соединенным с устройством обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, и нагрузочным узлом, имитирующим сопротивление повороту управляемых колес и соединенным с компьютером, оснащенным устройством ввода данных, при этом экран тренажера выполнен с возможностью демонстрирования изображения, подсказывающего обучаемому, какое положение тела при посадке он должен занять на месте водителя при преодолении соответствующего вида препятствия, а способ использования тренажера для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом дополнительно предусматривает то, что после размещения обучаемого на тренажере посредством датчиков определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам производится определение массы водителя, корректировка полной массы выбранного транспортного средства и координат центра масс при прямой посадке водителя, в ходе приобретения обучаемым первичных навыков вождения перед прохождением заданного маршрута, с обучаемым изучаются и практически осваиваются способы посадки на транспортном средстве в зависимости от характера преодолеваемых на маршруте препятствий: спусков, подъемов, косогоров, неровностей, радиусов кривизны, когда обучаемый приобретает практические навыки изменения положения тела при посадке на транспортном средстве во время движения по преодолеваемым препятствиям, которые имитируются изменением положения рабочего места водителя с мотоциклетной посадкой, мотоциклетным рулем и подножками, при этом на начальном этапе освоения способов посадки перед обучаемым на экране проецируется вид препятствия из реальной дорожной обстановки и силуэт положения тела водителя, соответствующего правильной его посадке применительно к преодолеваемому виду препятствия, что сопровождается соответствующим изменением положения рабочего места водителя, после приобретения обучаемым практических навыков изменения положения тела при посадке на транспортном средстве, режим подсказки, когда на экране проецируется правильная посадка, отключается и включается режим, при котором действия обучаемого при выборе посадки сравниваются с действиями опытного водителя, а отклонения действий обучаемого при выборе посадки, соответствующей виду препятствия, от действий опытного водителя фиксируются датчиками, о чем обучаемый информируется, если действия обучаемого при выборе посадки при заданных обучающим условий соответствуют эталонным параметрам, то обучающий моделирует реальные условия движения транспортного средства по заданному маршруту с отключенными устройствами сигнализации, оповещающими об отклонениях от действий опытного водителя, при этом состояние рулевого вала идентифицируется соответствующими датчиками угла и скорости поворота руля, а имитация сопротивления повороту управляемых колес осуществляется с помощью нагрузочного узла, размещенного на рулевом валу и соединенного с компьютером.
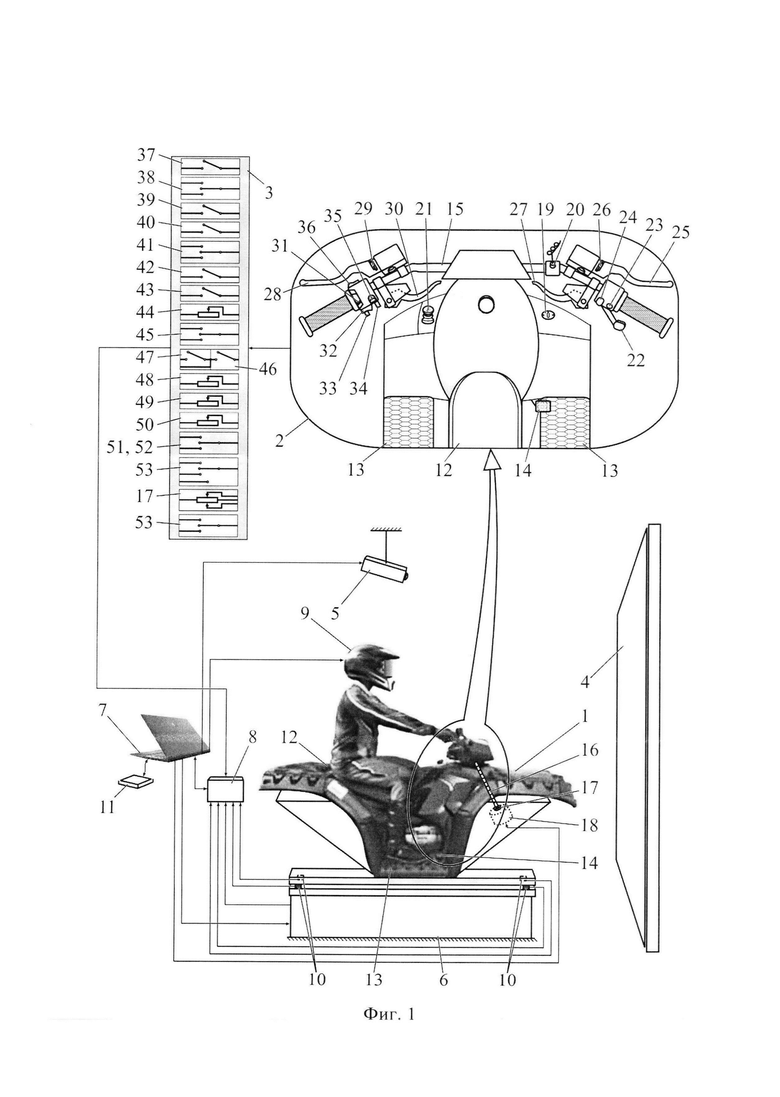
На фиг. 1 представлена схема предлагаемого тренажера для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом, который содержит имитатор 1 рабочего места водителя с органами 2 управления и датчиками 3 их положения, имитатор дорожно-транспортной обстановки, включающий проекционный экран 4, средства проецирования 5, систему 6 изменения положения имитатора 1 рабочего места водителя, компьютер 7, устройство 8 обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, элементы амуниции водителя в виде шлема 9, оборудованного наушниками, датчики 10 определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам, устройство 11 ввода данных.
Имитатор 1 рабочего места водителя оборудован сиденьем 12 с мотоциклетной посадкой, двумя подножками 13, на одной из которых установлена педаль 14 управления тормозами, рулем 15 мотоциклетного типа с расположенными на нем органами 2 управления и рулевым валом 16, оснащенным датчиком 17 угла и скорости поворота руля и нагрузочным узлом 18, имитирующим сопротивление повороту управляемых колес.
Компьютер 7 соединен со средствами проецирования 5, устройством 8 обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, устройством ввода данных 11, нагрузочным узлом 18, имитирующим сопротивление повороту управляемых колес, и с элементами штатной амуниции водителя в виде шлема 9, оборудованного наушниками.
Устройство 8 обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных подключено к датчикам 3 положения органов управления, датчику 17 угла и скорости поворота руля, датчикам 10 определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам и системе 6 изменения положения имитатора 1 рабочего места водителя.
Тренажер оснащается органами управления, которые расположены: замок зажигания 19 - на корпусе имитатора 1 рабочего места водителя;
аварийный выключатель 20 с витым шнуром и браслетом - на руле 15;
рычаг 21 коробки передач - на корпусе имитатора 1 рабочего места водителя;
педаль 14 управления тормозами (для привода передних и задних тормозов рабочей тормозной системы) - над правой подножкой 13;
рычаг 22 подачи топлива - на правой рукоятке руля 15;
кнопка 23 переключения режима полного привода - на правой рукоятке руля;
флажок-предохранитель 24 с кнопкой блокировки дифференциала - на правой рукоятке руля;
правый рычаг 25 привода передних тормозов рабочей тормозной системы - на правой рукоятке руля;
правый рычаг-фиксатор 26 стояночной тормозной системы (с гидравлическим приводом) - на правой рукоятке руля;
правый рычаг 27 стояночной тормозной системы (с механическим приводом) - на правой рукоятке руля;
левый рычаг 28 привода задних тормозов рабочей тормозной системы -на левой рукоятке руля;
левый рычаг-фиксатор 29 стояночной тормозной системы (с гидравлическим приводом) - на левой рукоятке руля;
левый рычаг 30 стояночной тормозной системы (с механическим приводом) - на левой рукоятке руля;
переключатель 31 света фар - на левой рукоятке руля;
кнопка 32 звукового сигнала и аварийной сигнализации - на левой рукоятке руля;
переключатель 33 сигнала поворота - на левой рукоятке руля;
рычаг 34 управления воздушной заслонкой - на левой рукоятке руля;
кнопка 35 аварийного останова двигателя - на левой рукоятке руля;
кнопка 36 запуска двигателя - на левой рукоятке руля.
Состояние органов управления идентифицируется соответствующими датчиками: значение угла и скорости поворота руля 15 - датчиком 17, подключение аварийного выключателя 20 - датчиком 37, положение ключа замка зажигания 19 - датчиком 38, нажатие кнопки 36 запуска двигателя - датчиком 39, нажатие кнопки 35 аварийного останова двигателя - датчиком 40, положение переключателя 33 сигнала поворота - датчиком 41, положение кнопки 32 звукового сигнала и аварийной сигнализации - датчиками 42 и 43, положения рычага подачи топлива 22 - датчиком 44, положение переключателя 31 света фар - датчиком 45, положение кнопки 23 переключения режима полного привода - датчиком 46, положение кнопки 24 блокировки дифференциала - датчиком 47, положение педали 14 привода передних и задних тормозов рабочей тормозной системы - датчиком 48, положение рычагов привода передних 25 и задних 28 тормозов рабочей тормозной системы - соответственно, датчиками 49 и 50, положение рычагов 26 и 27 стояночной тормозной системы - датчиком 51, положение рычагов 29 и 30 стояночной тормозной системы - датчиком 52, положение рычага 21 коробки передач - датчиком 53, положение рычага 34 управления воздушной заслонкой - датчиком 54.
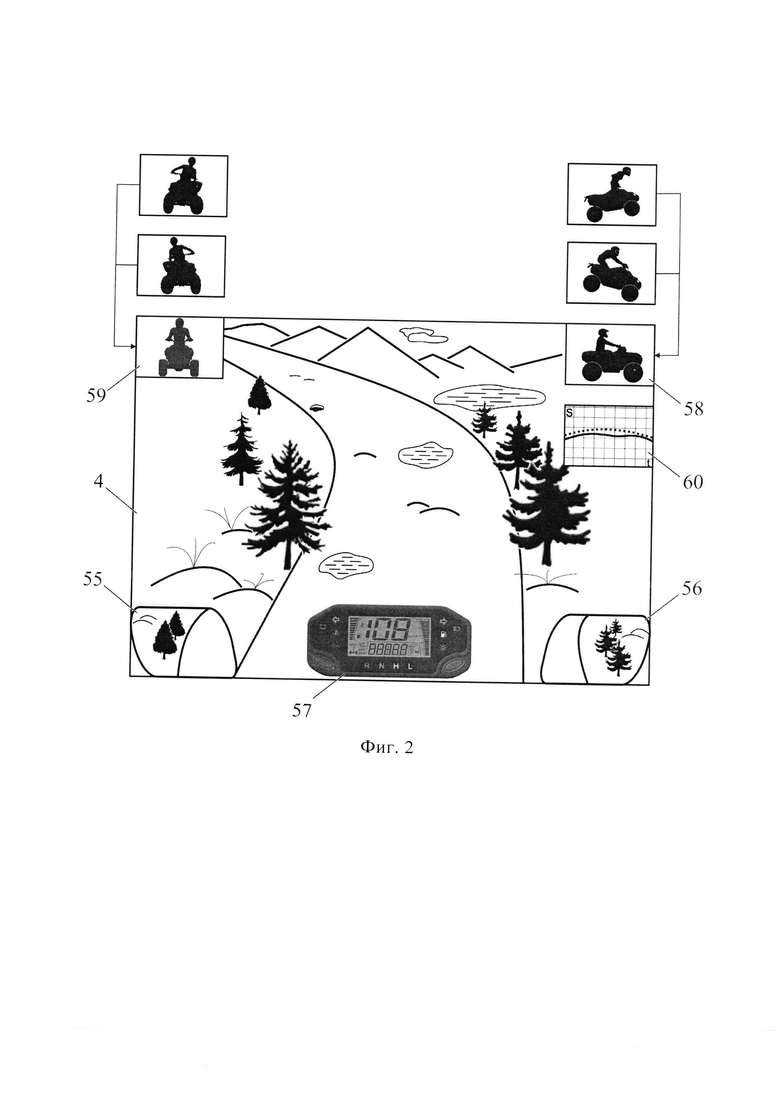
На фиг. 2 показан вариант имитации дорожно-транспортной обстановки, где на экране 4 демонстрируется вид маршрута движения. В нижних углах экрана 4 имитируются изображения в зеркалах заднего вида 55 и 56, в нижней части - приборная панель 57 (по типу выбранного транспортного средства) в верхнем правом углу демонстрируются изображения-подсказки 58 положения тела водителя, изменяемого в продольном направлении, в зависимости от вида преодолеваемого препятствия, в верхнем левом углу демонстрируются изображения-подсказки 59 положения тела водителя, изменяемого в поперечном направлении, в зависимости от вида преодолеваемого препятствия, справа, поверх изображения маршрута указываются характеристики (график) 60 прохождения маршрута обучаемым в сравнении с эталонным прохождением.
Реализация способа использования тренажера для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом осуществляется следующим образом.
Перед использованием тренажера в память компьютера 7 посредством устройства 11 ввода данных вносятся значения параметров технических характеристик транспортных средств, производится настройка и активация органов управления, согласно техническому описанию и инструкции по эксплуатации транспортного средства, а также вводятся параметры маршрутов: характер препятствий, значение их показателей (величина продольных и поперечных уклонов, высота (глубина), площадь и периодичность неровностей (выступов или впадин), кривизна маршрута и значение радиусов поворотов), вид опорной поверхности и ее сцепные качества, протяженность участков пути с соответствующими препятствиями с учетом их комбинирования, параметры видимости, освещенности, шумов и других внешних воздействий, либо все вышеуказанное выбирается из каталога вариантов маршрутов и марок транспортных средств, заложенных в память компьютера 7.
Обучаемый экипируется шлемом 9, оборудованным наушниками, размещается в имитаторе 1 рабочего места водителя в соответствии с требованиями руководства по эксплуатации выбранной марки транспортного средства и требованиями безопасности, садясь на сиденье 12 мотоциклетного типа, поставив обе ноги на подножки 13 и взявшись обеими руками за рукоятки руля 15 мотоциклетного типа. При этом посредством датчиков 10 определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам производится определение массы водителя, корректировка полной массы выбранного транспортного средства и координат центра масс при прямой посадке водителя.
Обучение начинается с ознакомления обучаемого с органами 2 управления транспортным средством, порядком и правилами пользования ими в соответствии с эксплуатационной документацией осваиваемой марки транспортного средства.
После изучения органов управления отрабатываются вопросы подготовки к пуску, запуска и остановки двигателя транспортного средства установленными в эксплуатационной документации способами, включение и выключение приборов освещения и сигнализации, трогания транспортного средства с места, разгона, торможения, движения задним ходом, переключения передач, включения и выключения полного привода, блокировки дифференциала, маневрирования (поворотов) на ровной опорной поверхности с незначительными неровностями. С этой целью обучаемый имитирует управление транспортным средством, воздействуя на органы 2 управления. При этом на экране 4 (фиг. 2) отображаются изменения, идентичные тем, которые обучаемый видел бы перед транспортным средством и в зеркалах заднего вида, если бы он действительно управлял транспортным средством. Одновременно имитатор 1 (фиг. 1) рабочего места меняет свое положение, имитируя изменение положения реального транспортного средства, благодаря тому, что устройство 8 обработки сигналов датчиков 3 положения органов 2 управления и отображения отклонения моделируемых параметров от эталонных подает соответствующий сигнал на систему 6 изменения положения имитатора 1 рабочего места водителя.
После получения обучаемым навыков пользования органами 2 управления и первичных навыков вождения транспортного средства с обучаемым изучаются и практически осваиваются способы посадки на транспортном средстве в зависимости от характера преодолеваемых на маршруте препятствий: спусков, подъемов, косогоров, неровностей, радиусов кривизны, в результате чего обучаемый приобретает практические навыки изменения положения тела при посадке на транспортном средстве во время движения по преодолеваемым препятствиям, которые имитируются изменением положения рабочего места водителя посредством действия системы 6 изменения положения имитатора 1 рабочего места водителя. С этой целью обучающий поочередно транслирует посредством имитатора дорожно-транспортной обстановки различные виды препятствий. При этом на экране 4 проецируется соответствующий вид препятствия, система 6 изменения положения имитатора 1 рабочего места водителя изменяет положение имитатора 1 рабочего места водителя в пространстве, а в верхних углах экрана 4 (фиг. 2) демонстрируются изображения 58 и 59, подсказывающие обучаемому, какое положение тела при посадке он должен занять на месте водителя при преодолении соответствующего вида препятствия.
После приобретения обучаемым практических навыков посадки на транспортном средстве путем смещения положения тела в соответствующую сторону в зависимости от характера преодолеваемых на маршруте препятствий, обучающий при помощи имитатора дорожно-транспортной обстановки транслирует учебный маршрут, который обучаемый отрабатывает под руководством обучающего. После ознакомления с маршрутом и его отработки, обучающий транслирует посредством имитатора дорожно-транспортной обстановки характеристики эталонного прохождения маршрута (опытным специалистом). При прохождении маршрута по эталонному графику опытного специалиста перед обучаемым на экране 4, на основе анализа в устройстве 8 обработки сигналов датчиков 3 положения органов 2 управления и отображения отклонения моделируемых параметров от эталонных, высвечиваются в динамике отображения отклонений, допускаемые обучаемым от эталонных на графике 60, изображениях 58 и 59 и посредством голосовых подсказок через наушники, которыми оборудован шлем 9, в виде времени отставания, либо указаний на неправильно включенную передачу, скорость движения, величину и скорость поворота руля, положение тела водителя при посадке, либо других отклонений, зная которые обучаемый может скорректировать свои действия.
Параметры эталонного прохождения маршрута в тренажере рассчитываются по показателям тягово-скоростной характеристики, когда при известных параметрах опорной поверхности и параметрах технической характеристики транспортного средства определяется его возможная максимальная теоретическая скорость движения по условиям сопротивления движению и условиям сцепления колес с опорной поверхностью, а также по условиям обеспечения курсовой, продольной и поперечной устойчивости транспортного средства при оптимальном выборе типа привода, передачи в коробке передач, величины подачи топлива, величины и скорости поворота руля и координат центра масс в заданных дорожных условиях.
Определение отклонений значений эталонных параметров прохождения маршрута от моделируемых обучаемым осуществляется в устройстве 8 обработки сигналов датчиков 3 положения органов 2 управления и отображения отклонения моделируемых параметров от эталонных на основе сравнения расчетных параметров и соответствующих им положений органов управления, оптимальных координат центра масс, обусловленных соответствующей посадкой (смещением тела) водителя, с реальными сигналами датчиков 3 положения органов 2 управления, моделируемыми обучаемым, и реальными координатами центра масс, определяемыми на основе сигналов датчиков 10 при заданных системой 6 изменения положения имитатора 1 рабочего места водителя углах продольного и поперечного наклонов.
После того, как обучаемый получит достаточные навыки, обучающий включает имитацию прохождения этого же маршрута в реальных дорожно-транспортных условиях видимости, освещенности, шумов и других внешних воздействий, воспринимаемых обучаемым тактильно при изменении положения имитатора 1 рабочего места водителя и аудиовизуально с экрана 4 и наушников, которыми оборудован шлем 9. При этом на экране 4 изображения 58, 59 и 60 не демонстрируются, голосовые подсказки через наушники, которыми оборудован шлем 9, не озвучиваются, а перед обучаемым имитируется только маршрут, который он проходит, воздействуя на органы 2 управления. Отображения отклонений, допускаемые обучаемым от эталонных параметров на графике 60, изображениях 58 и 59 в виде времени отставания, а также фиксация случаев неправильно включенной передачи, выбора скорости движения, величины и скорости поворота руля, положений тела водителя при посадке или других отклонений, согласованных по времени преодоления маршрута, транслируются на мониторе компьютера 7, сохраняется в памяти компьютера в виде отдельного файла, который можно проанализировать в любое время. Анализируя указанные показатели, характер и количество ошибок обучаемого, обучающий оценивает обучаемого и корректирует методику обучения.
В результате достигается расширение функциональных возможностей способа начального обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом, реализуемого тренажером для обучения вождению, за счет практического изучения способов посадки на транспортное средство в зависимости от характера преодолеваемых препятствий и учета влияния положения тела водителя и смещения центра масс на показатели устойчивости транспортного средства с мотоциклетной посадкой, а также определения отклонений параметров действий обучаемого от эталонных, обусловленных изменением положения тела водителя при преодолении препятствий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Тренажер для водителей транспортных средств | 1988 |
|
SU1626260A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| СПОСОБ ОЦЕНКИ ПРОФЕССИОНАЛЬНОСТИ ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2465653C1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| Учебное устройство для дозирования усилия на педаль сцепления транспортного средства при начале движения | 2022 |
|
RU2805237C1 |
| ИМИТАТОР ДОРОЖНЫЙ ТРЕНАЖЁРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2652696C2 |
Группа изобретений относится к учебным моделям или тренажерам для обучения управлению четырехколесным внедорожным мототранспортным средством. Тренажер для обучения содержит имитатор рабочего места водителя с органами управления и датчиками их положения, имитатор дорожно-транспортной обстановки, включающий проекционный экран, средства проецирования, систему изменения положения имитатора рабочего места водителя, компьютер, устройство обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, элементы амуниции водителя, датчики определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам, соединенные с устройством обработки сигналов датчиков. Имитатор рабочего места водителя оборудован сидением с мотоциклетной посадкой, подножками, рулем мотоциклетного типа с расположенными на нем органами управления и рулевым валом, оснащенным датчиком угла и скорости поворота руля и нагрузочным узлом, имитирующим сопротивление повороту управляемых колес и соединенным с компьютером. Достигается расширение функциональных возможностей способа начального обучения приемам управления транспортным средством. 2 н.п. ф-лы, 2 ил.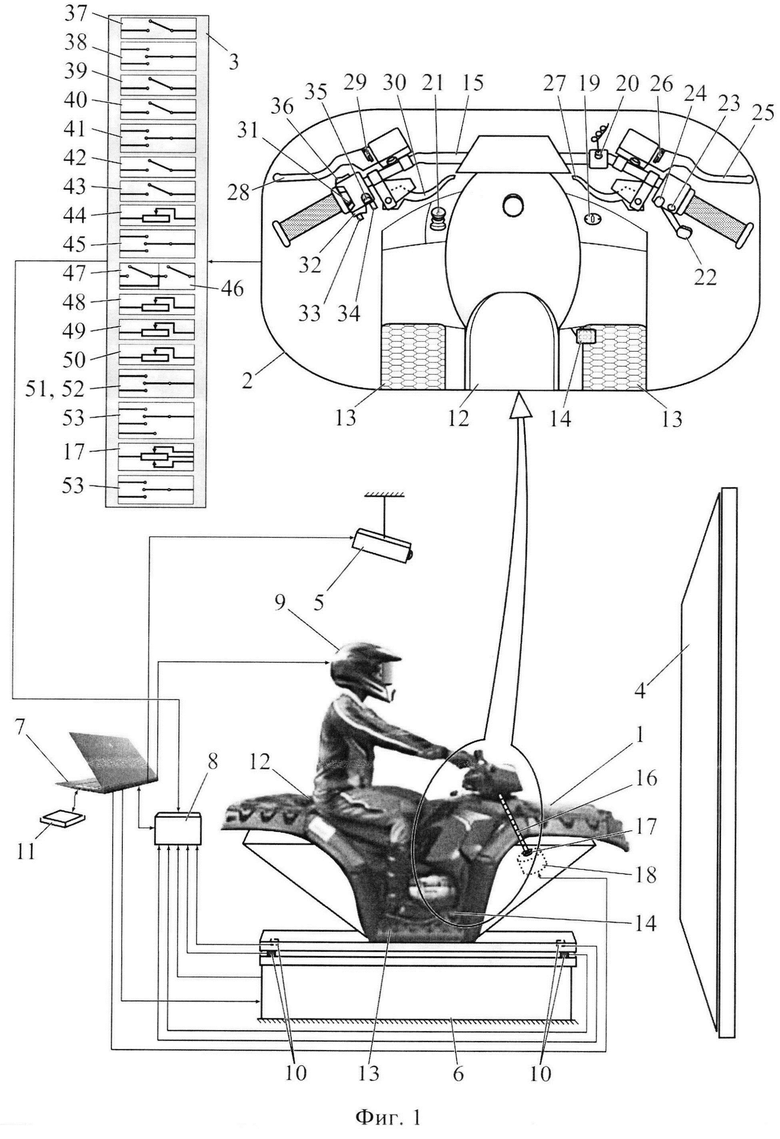
1. Способ использования тренажера для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом, при котором обучаемый занимает учебное место, представляющее собой имитатор рабочего места водителя с органами управления, экраном для проектирования дорожной обстановки в реальном времени и возможностью изменения положения в зависимости от проецируемого изображения, настраивает рабочее место в соответствии с требованиями инструкции по эксплуатации транспортного средства, включает тренажер в работу, при этом на экране проецируется дорожная обстановка, а обучаемый имитирует управление транспортным средством путем воздействия на приборы управления, в соответствии с дорожной обстановкой, выполняемой задачей и показаниями приборов, после приобретения обучаемым первичных навыков вождения, определяемых по правильности выполнения действий, включается режим, при котором действия обучаемого сравниваются с действиями опытного водителя, а отклонение действий обучаемого от действий опытного водителя фиксируется датчиками, о чем обучаемый информируется, при моделировании движения транспортного средства на тренажере задача формируется в виде эталонной поездки на транспортном средстве из начальной точки маршрута в конечную, обучаемый стремится к однозначному решению стоящей перед ним задачи так, как предложено при эталонном прохождении маршрута, задача будет считаться решенной, если обучаемый выдержит в заданных обучающим пределах по отношению к параметрам, показанным опытным водителем, при контроле и оценке уровня профессиональной подготовки экзаменуемый моделирует реальные условия движения транспортного средства по заданному маршруту с отключенными устройствами сигнализации, оповещающими об отклонениях от эталонных действий, оценку теоретической и практической подготовки обучаемого дают в зависимости от показателей отклонений от эталонных параметров движения, предусматривается оснащение обучаемого шлемом, оборудованным наушниками, через которые транслируются звуки, одновременно на экран с дорожной обстановкой проецируются изображения возможных действий, при прохождении обучаемым маршрута осуществляется вывод на экран обучающего графиков, согласованных по временной шкале, на одном из которых фиксируется особенность и степень воздействия, на втором - сложность преодолеваемой дистанции, выраженная в баллах и соотносящаяся с изображением на экране, отличающийся тем, что после размещения обучаемого на тренажере посредством датчиков определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам производится определение массы водителя, корректировка полной массы выбранного транспортного средства и координат центра масс при прямой посадке водителя, в ходе приобретения обучаемым первичных навыков вождения перед прохождением заданного маршрута, с обучаемым изучаются и практически осваиваются способы посадки на транспортном средстве в зависимости от характера преодолеваемых на маршруте препятствий: спусков, подъемов, косогоров, неровностей, радиусов кривизны, когда обучаемый приобретает практические навыки изменения положения тела при посадке на транспортном средстве во время движения по преодолеваемым препятствиям, которые имитируются изменением положения рабочего места водителя с мотоциклетной посадкой, мотоциклетным рулем и подножками, при этом на начальном этапе освоения способов посадки перед обучаемым на экране проецируется вид препятствия из реальной дорожной обстановки и силуэт положения тела водителя, соответствующего правильной его посадке применительно к преодолеваемому виду препятствия, что сопровождается соответствующим изменением положения рабочего места водителя, после приобретения обучаемым практических навыков изменения положения тела при посадке на транспортном средстве, режим подсказки, когда на экране проецируется правильная посадка, отключается и включается режим, при котором действия обучаемого при выборе посадки сравниваются с действиями опытного водителя, а отклонения действий обучаемого при выборе посадки, соответствующей виду препятствия, от действий опытного водителя фиксируются датчиками, о чем обучаемый информируется, если действия обучаемого при выборе посадки при заданных обучающим условий соответствуют эталонным параметрам, то обучающий моделирует реальные условия движения транспортного средства по заданному маршруту с отключенными устройствами сигнализации, оповещающими об отклонениях от действий опытного водителя, при этом состояние рулевого вала идентифицируется соответствующими датчиками угла и скорости поворота руля, а имитация сопротивления повороту управляемых колес осуществляется с помощью нагрузочного узла, размещенного на рулевом валу и соединенного с компьютером.
2. Тренажер для обучения приемам управления четырехколесным внедорожным мототранспортным средством, а именно квадроциклом, содержащий имитатор рабочего места водителя с органами управления и датчиками их положения, имитатор дорожно-транспортной обстановки, включающий проекционный экран, средства проецирования, систему изменения положения имитатора рабочего места водителя, компьютер, устройство обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, элементы амуниции водителя в виде шлема, оборудованного наушниками, соединенные таким образом, что компьютер соединен со средствами проецирования, устройством обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, и с элементами штатной амуниции водителя в виде шлема, оборудованного наушниками, одновременно устройство обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных подключено к датчикам положения органов управления и системе изменения положения имитатора рабочего места водителя, отличающийся тем, что он дополнительно оборудован датчиками определения величины статической нагрузки на колеса и значений неравномерности ее распределения по колесам, соединенными с устройством обработки сигналов датчиков, а имитатор рабочего места водителя оборудован сиденьем с мотоциклетной посадкой, двумя подножками, на одной из которых установлена педаль управления тормозами, рулем мотоциклетного типа с расположенными на нем органами управления и рулевым валом, оснащенным датчиком угла и скорости поворота руля, соединенным с устройством обработки сигналов датчиков положения органов управления и отображения отклонения моделируемых параметров от эталонных, и нагрузочным узлом, имитирующим сопротивление повороту управляемых колес и соединенным с компьютером, оснащенным устройством ввода данных, при этом экран тренажера выполнен с возможностью демонстрирования изображения, подсказывающего обучаемому, какое положение тела при посадке он должен занять на месте водителя при преодолении соответствующего вида препятствия.
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ И ОТРАБОТКИ АКРОБАТИЧЕСКИХ ПРИЕМОВ САМОСТРАХОВКИ МОТОЦИКЛИСТОВ | 2012 |
|
RU2493607C1 |
| US 2009136903 A1, 28.05.2009 | |||
| US 2019051207 A1, 14.02.2019 | |||
| Приспособление для проверки и разметки вагонных подшипников | 1941 |
|
SU67754A1 |

